DSP原理2分析
利用dsp进行AD和DA的转换 2
利用dsp进行AD和DA的转换___实验报告开课实验室:2012 年 4 月日学院物电学院年级、专业、班09光信2班姓名)成绩课程名称Dsp实验实验项目名称利用dsp进行AD和DA的转换指导老师签名一、实验目的1.通过实验熟悉VC5509A的定时器。
2.掌握VC5509A片内AD的控制方法。
3.掌握数模转换程序设计方法。
二、实验原理1.TMS320VC5509A模数转换模块特性:-带内置采样和保持的10 位模数转换模块ADC,最小转换时间为500ns,最大采样率为21.5kHz。
-2 个模拟输入通道(AIN0—AIN1)。
-采样和保持获取时间窗口有单独的预定标控制。
2.模数转换工作过程:-模数转换模块接到启动转换信号后,开始转换第一个通道的数据。
-经过一个采样时间的延迟后,将采样结果放入转换结果寄存器保存。
-转换结束,设置标志。
-等待下一个启动信号。
3.模数转换的程序控制:模数转换相对于计算机来说是一个较为缓慢的过程。
一般采用中断方式启动转换或保存结果,这样在CPU 忙于其他工作时可以少占用处理时间。
设计转换程序应首先考虑处理过程如何与模数转换的时间相匹配,根据实际需要选择适当的触发转换的手段,也要能及时地保存结果。
由于TMS320VC5509A DSP芯片内的A/D转换精度是10 位的,转换结果的低10 位为所需数值,所以在保留时应注意将结果的高 6 位去除,取出低10 位有效数字。
1.数模转换操作:利用专用的数模转换芯片,可以实现将数字信号转换成模拟量输出的功能。
在ICETEK-VC5509-A 板上,使用的是DAC7617 数模芯片,它可以实现同时转换四路模拟信号输出,并有12 位精度,转换时间10μs。
其控制方式较为简单:首先将需要转换的数值通过数据总线传送到DAC7617 上相应寄存器,再发送转换信号,经过一个时间延迟,转换后的模拟量就从DAC7617 输出引脚输出。
2.DAC7617 与TMS320VC5509A的连接:由于TMS320VC5509A DSP 没有数模转换输出设备,采用外扩数模转换芯片的方法。
dsp功放原理
dsp功放原理
DSP(数字信号处理)功放原理是通过数字信号处理技术对音
频信号进行采样、数字化处理和再构建,进而放大音频信号实现功率放大的一种技术。
首先,将音频信号经过模拟-数字转换器(ADC)进行采样,
将连续的模拟信号转换成离散的数字信号。
采样频率决定了转换后的数字信号的精度和还原能力。
接下来,通过数字信号处理器(DSP)对采样后的音频信号进
行处理。
DSP可以进行各种数字滤波、均衡等信号处理算法,以调整音频信号的频谱和时域特性,实现对声音的增强、修饰或去除干扰。
在经过数字信号处理后,会使用数模转换器(DAC)将数字
信号转换为模拟信号。
数模转换器的比特数和采样频率决定了数字信号转换为模拟信号的还原质量。
最后,将经过数模转换后的模拟信号输入到功率放大器中进行放大。
功率放大器是负责将低功率的音频信号放大为高功率的信号,以驱动扬声器或其他负载。
通过DSP功放原理,我们可以对音频信号进行高质量的数字
信号处理,并实现功率放大,从而提高音频系统的音质和音量。
DSP(2)
1.DSP芯片的主要结构特点:(1)哈佛结构;(2)专用的硬件乘法器;(3)流水线操作;(4)特殊的DSP指令;(5)快速的指令周期。
2.中央处理器的体系架构可以分为:冯•诺依曼结构和哈佛结构。
冯·诺依曼结构也称普林斯顿结构,是一种将程序指令存储器和数据存储器合并在一起的存储器结构。
由于取指令和存取数据要从同一个存储空间存取,经由同一总线传输,因此它们无法重叠执行,只有一个完成后再进行下一个。
哈佛结构是一种将程序指令存储和数据存储分开的存储器结构。
可以减轻程序运行时的访存瓶颈。
3. DSP芯片的发展:美国AMI公司在1978年发布第一个单片DSP芯片;美国德州仪器公司(Texas Instruments,简称TI)的DSP芯片包含三大系列:TMS320C2000系列、TMS320C5000系列、TMS320C6000系列。
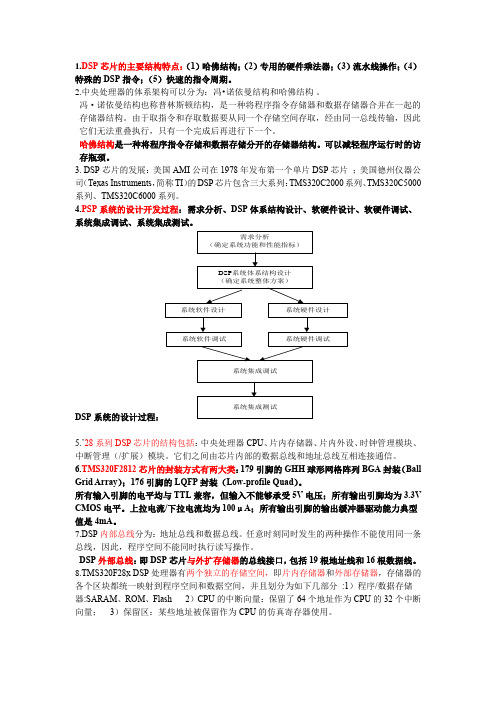
4.PSP系统的设计开发过程:需求分析、DSP体系结构设计、软硬件设计、软硬件调试、系统集成调试、系统集成测试。
DSP5.’28系列DSP芯片的结构包括:中央处理器CPU、片内存储器、片内外设、时钟管理模块、中断管理(/扩展)模块。
它们之间由芯片内部的数据总线和地址总线互相连接通信。
6.TMS320F2812芯片的封装方式有两大类:179引脚的GHH球形网格阵列BGA封装(Ball Grid Array);176引脚的LQFP封装(Low-profile Quad)。
所有输入引脚的电平均与TTL兼容,但输入不能够承受5V电压;所有输出引脚均为3.3V CMOS电平。
上拉电流/下拉电流均为100μA;所有输出引脚的输出缓冲器驱动能力典型值是4mA。
7.DSP内部总线分为:地址总线和数据总线。
任意时刻同时发生的两种操作不能使用同一条总线,因此,程序空间不能同时执行读写操作。
DSP外部总线:即DSP芯片与外扩存储器的总线接口,包括19根地址线和16根数据线。
8.TMS320F28x DSP处理器有两个独立的存储空间,即片内存储器和外部存储器,存储器的各个区块都统一映射到程序空间和数据空间,并且划分为如下几部分:1)程序/数据存储器:SARAM、ROM、Flash 2)CPU的中断向量:保留了64个地址作为CPU的32个中断向量;3)保留区:某些地址被保留作为CPU的仿真寄存器使用。
dsp原理与应用

dsp原理与应用数字信号处理(Digital Signal Processing,简称DSP)是一种利用数字技术来分析、处理和修改信号的方法。
它广泛应用于音频、视频、图像等领域,并在现代通信、媒体、医疗等行业中发挥着重要作用。
本文将介绍DSP的原理和应用。
一、DSP的原理数字信号处理的原理基于离散时间信号的采样和量化,通过数学算法对信号进行处理和分析。
其核心内容包括信号的数字化、滤波、频谱分析和变换等。
1.1 信号的数字化DSP处理的信号需要先经过模数转换器(ADC),将连续时间的模拟信号转换为离散时间的数字信号。
转换后的信号由一系列采样值组成,这些采样值能够准确地表示原始信号的变化。
1.2 滤波滤波是DSP中最基本、最常用的操作之一。
通过选择性地改变信号的某些频率分量,滤波可以实现信号的去噪、降噪、降低失真等功能。
常用的滤波器类型包括低通滤波器、高通滤波器、带通滤波器和带阻滤波器。
1.3 频谱分析频谱分析是对信号频率特性进行分析的过程。
通过应用傅里叶变换等数学变换,可以将时域信号转换为频域信号,提取出信号中的各种频率成分。
常用的频谱分析方法有离散傅里叶变换(DFT)和快速傅里叶变换(FFT)。
1.4 变换变换是DSP的核心之一,它通过应用数学算法将信号从一个时域变换到另一个频域,或者从一个频域变换到另一个时域。
常见的变换包括离散傅里叶变换(DFT)、离散余弦变换(DCT)、小波变换等。
二、DSP的应用DSP在各个领域都有广泛的应用。
以下列举了一些常见的DSP应用:2.1 音频处理在音频处理中,DSP被广泛应用于音频信号的滤波、均衡、降噪、混响、变速变调等处理。
通过DSP的处理,可以改善音频质量,提升音乐和语音的清晰度和逼真度。
2.2 视频处理DSP在视频处理中扮演着重要角色,包括视频编解码、视频压缩、图像增强、运动估计等。
通过DSP的处理,可以实现视频的高清播放、流畅传输等功能。
2.3 通信系统在通信系统中,DSP用于调制解调、信道编码解码、信道均衡、自适应滤波等方面。
DSP实验报告1,2

DSP原理与应用实验报告实验一集成开发环境CCS应用基础一、程序分析(1)三个文件的作用及接口情况,说明各个文件中伪指令的作用。
答:test1.asm文件的作用是汇编主程序,vectors.asm文件是中断矢量处理程序,test1.cmd文件是命令文件。
test1.asm中伪指令的作用:.title作用是在每页的顶部打印文件标题.mmregs为存储器映像寄存器定义符号名。
使用.mmregs的功能和对所有的存储器映像寄存器执行set伪指令相同。
.usect汇编命令建立的自定义段也是未初始化段.def 定义全局变量.text已初始化段.end终止汇编,位于程序源程序的最后一行。
vectors.asm中伪指令的作用:.ref 定义全局变量.sect汇编器伪指令建立的自定义段也是已初始化段.space对存储器进行初始化。
(2)分析主程序的结构和功能,对每条指令进行注释,写出执行结果。
.title "example1.asm".mmregs ;使能存储器映像寄存器stack .usect "STACK",10h.def _c_int00;------------------------------------------------------------------------------.text_c_int00:stm # stack+10h, SP ;设置堆栈指针stm #0x0000, SWWSR ;所有存储器未加软件延迟;================================================stm #0x70,AR2st #0xff80,*AR2;================================================;观察控制位SXM的作用;当SXM=0时,进行无符号数的加载rsbx SXM ;SXM置零nopld *AR2, A ;(A)=( 000000FF80 H);------------------------;当SXM=1时,进行有符号数的加载ssbx SXM ;SXM置一nopld *AR2, A ;(A)=( FFFFFFFF80H ) ;================================================ ;================================================ ;观察控制位OVM的作用;当OVM=0时,对溢出不进行处理rsbx OVMld #0x7fff, 16, B ;立即数左移16位给Badd #0x7fff, 16, B ;(B)=( 00FFFE0000H);------------------------;当OVM=1时,对溢出进行处理ssbx OVMld #0x7fff, 16, Badd #0x7fff, 16, B ;(B)=( 007FFFFFFFH );================================================ ;================================================ ;观察控制位C16的作用;当C16=0时,进行32位双精度数加法运算ssbx OVMld #0x0001, 16, Aadd #0x7fff, Adst A, *AR2ld #0x0001, 16, Aor #0xffff, A ;相“或”rsbx C16nopdadd *AR2, A, B ;(B)=( 0000037FFEH);------------------------;当C16=1时,进行两个独立的16位数加法运算ssbx C16nopdadd *AR2, A, B ;(B)=( 0000027FFE H);================================================ ;================================================ ;观察控制位FRCT的作用;当FRCT=0时,对乘积不进行移位ld #0x1234, 16, Arsbx FRCTnopmpya *AR2 A中高16位与T相乘;(B)=( 0000001234H) ;------------------------;当FRCT=1时,对乘积左移1位ssbx FRCTnopmpya *AR2 ;(B)=( 0000002468 H);================================================ ;================================================ ;观察测试位TCbitf *AR2, #0x8000 ;(TC)=( 0 )nopnop;------------------------bitf *AR2, #0x0001 ;(TC)=( 1 )nopnop;================================================ ;================================================ ;观察标志位Cssbx SXMld #0x7fff, Ald #0x8000, Bmax A ;(C)=( 0 )nopnop;------------------------min B ;(C)=( 1 )nopnop;================================================ ;================================================ ;观察标志位OV A, OVBssbx SXMrsbx OV Ald #0x7fff, 16, Aadd #0xffff, A ;(OV A)=(0 )nopnop;------------------------add #0x7fff, 16, A ;(OV A)=( 1 )nopnop;================================================ dead_loop:nopnopnopnopb dead_loop.end(3)写出本工程的分段和存储器的定位情况。
DSP原理及应用实验二---堆栈的使用方法

• 1、实验要求: 用软件仿真的方法编译并调试幻灯 片第3页的实验参考程序,在存储器 中观察正确结果。
• 2、实验步骤
请认真倾听教师讲解的要点,也可参阅附 件1及附件2,结合思考题完成实验。写实验 报告时自行写出实验步骤。 操作步骤要点: (1)新建项目/新建文件/添加文件到项目/编 辑文件; (2)点“rebuild all”工具进行编译、汇编和 链接; (3)装载上一步生成的out文件; (4)运行后点“view/memory”观察运行结果。
• 3、实验程序——堆栈的使用方法
(1)汇编主程序文件
(3)链接命令文件
(2)中断向量表文件
• 4、实验思考题:
(1)修改主程序,实现堆栈区100个单元全 部数据变为“DEAD”。 (2)通过单步调试,观察SP和寄存器内容的 变化,简述堆栈的特点? (3) 重新编写主程序,用其它指令。
DSP-2(2012新)

2012-3-28
7
离散时间信号1.1 离散时间信号-序列
(1) 公式表示: 公式表示 表示: n x ( n) = a –如 (2)图形表示:直观 图形表示 图形表示:
0 < a <1
(3)集合符号表示,例如: 集合符号表示 例如: 集合符号表示, x(n)={…1.3,2.5,3.3,1.9,0,4.1…}
2012-3-28 6
1.1 离散时间信号 序列 离散时间信号-序列
序列
不是序列
强调:序列x(n)中n取整数 非整数时无定义,在数值上(序列 取整数, 强调:序列x(n)中n取整数,非整数时无定义,在数值上(序列 等于信号的采样值, 值)等于信号的采样值,即: 等于信号的采样值
序列的表示:用公式表示、用图形表示、用集合符号表示。 序列的表示:用公式表示、用图形表示、用集合符号表示。
进行等间隔采样 采样间隔为T, 等间隔采样, 对模拟信号 xa (t ) 进行等间隔采样,采样间隔为 , 得到离散时间信号(序列 序列): 得到离散时间信号 序列 : x ( n) = xa (nT ) = xa (t ) t =nT , −∞ < n < ∞
注意:n为整数;在非整数位置处无定义
有序的数据序列
δ(n)与u(n)之间的关系: 与 之间的关系: 之间的关系
δ ( n ) = u ( n ) − u ( n − 1) u ( n ) = ∑ δ ( n − k )
k =0
2012-3-28 11
∞
1.1 离散时间信号 序列 离散时间信号-序列
3、矩形序列 N(n) 、矩形序列R
1 0 ≤ n ≤ N − 1 RN ( n ) = 0 其它 n
dsp(LED灯闪烁实验)

LED灯闪烁实验报告一、实验目的1 、初步了解TMS320VC5416DSK硬件的基本结构及工作原理。
2、学习和熟悉Code Composer Studio 开发环境。
3、学习BSL(Board Support Library)二、实验仪器PC机一台TMS320VC5416DSK一套(附CCS)三、实验原理1、硬件原理图2 、软件流程图四实验步骤1、创建新工程2、在项目浏览器中激活led.cdb文件进行编辑3、修改属性4、设置选项5、调试rebuild all——Load program 后生成led.out文件把此文件装载到5416DSK上,运行显示结果五、实验现象、结果及分析1、一个灯闪烁的实验程序:void Blink0(){int delay,i;delay = 200; //亮灭时间间隔while(1) //控制灯的亮和灭{DSK5416_LED_on(0);TSK_sleep(delay);DSK5416_LED_off(0);TSK_sleep(delay);}}主函数:void main(){// Initialize the board//support libraryDSK5416_init();}』实验现象:灯1不断闪烁,通过调整程序中delay的值的大小可以改变闪烁频率。
2、程序修改1:改变灯闪烁的时间间隔程序如下:void Blink0(){int delay,i;delay = 200; //亮灭时间间隔while(1) //控制灯的亮和灭{DSK5416_LED_on(0);TSK_sleep(delay);DSK5416_LED_off(0);TSK_sleep(delay);}}实验现象:指示灯闪烁的时间间隔变大,为之前的5倍。
3)程序修改2:灯1,2,3,4同时闪烁核心程序:void Blink0(){int delay;delay = 200;while(1) //4个灯同时闪烁 { //4个灯同时亮DSK5416_LED_on(0);DSK5416_LED_on(1);DSK5416_LED_on(2);DSK5416_LED_on(3);TSK_sleep(delay);//4个灯同时灭DSK5416_LED_off(0);DSK5416_LED_off(1);DSK5416_LED_off(2);DSK5416_LED_off(3);TSK_sleep(delay);}}实验现象:4个灯同时闪烁,改变delay的值也可以改变闪烁的频率。
DSP实验二拨码开关实验

实验二拨码开关实验—、实验目的二、实验设备运算机,版本软件,DSP仿真器,E300实验箱,2812CPU板。
三、实验原理8位的数字量输入(由拨码开关产生),当拨码打到靠近LED时为低。
相反为高。
通过74LS244(可读)缓冲连接到DSP的数据总线的低8位。
CPU通过读指令读取到拨码开关产生的8位输出的数字量,然后CPU通过写指令把读出的8位数字量写入(0x2200)单元内,使连接到DSP的数据总线的低8位的74LS273的输出端产生高低信号,现在LED灯产生亮灭。
当对应LED灯点亮时说明输出为低,熄灭时为高。
(器件74LS244和74LS273详细的介绍请参看数据手册)数字量输入输出单元的资源分派如下:基地址:2000h(当CS1为0时分派有效)数字量分派空间为数据空间地址:基地址+0x2200(低8位,只读)拨码开关扩展工作原理说明:74LS244片选号、74LS273片选信号和74LS273复位信号由E300上CPLD译码产生。
本实验利用DSP数据总线的低8位。
实验任务一:一、编写程序完成将拨码开关的信息读入DSP,然后再将该信息回写,操纵led灯。
调整"数字输入输出单元"的开关K1~K8,观看LED1~LED8灯亮灭的转变。
2、本实验的程序流程框图如下:3、输入要紧程序#include "" 2812CPU板的JUMP1的1和2脚短接,拨码开关SW1的第二位置ON。
2.E300板上的开关SW4的第二位置ON,其余OFF;SW5开关全数置ON;其余开关全数置OFF。
3.运行Code Composer Studio (CCS)(需要“DEBUG→Connect”)4. 用“Project\open”打开系统项目文件途径为“c:\DSP_examep\DSP281X_examples\e300_02_switch\”双击该文件5、输入要紧程序。
六、编译程序并装载。
第2章-DSP内核结构及存储器映射
中央算术逻辑单元执行大部分的算术和逻辑运算功能,并且实现大多数 的功能都只要1个时钟周期,这些功能包括:16位加、16位减、布尔逻辑操作、 位测试、移位和循环功能。有关中央算术逻辑单元的结构框图,如下图。
2.1 CPU内部结构
2.1.4 累计器(ACC)
当CALU工作时,会将计算结果送至32位累加器,累计器负责将结果进行 单移位或者循环移位,然后将结果输出到数据定标移位器。
2.2 存储器和I/O空间
❖ I/O空间的访问都可用IN和OUT指令。当用IN或OUT指令时,信号IS将变成有效, 因此可用信号IS作为外围I/O设备的片选信号。访问外部I/O端口与访问程序存储器、 数据存储器复用相同的地址总线和数据总线。数据总线的宽度为16位,若使用8位 的外设,即可使用高8位数据总线,也可使用低8位数据总线,以适应特定应用的 需要。
块模1C令时。L时块,钟K置O钟时芯使进1U且钟片能行后T正且进该锁引需常正入模相脚要运常那块倍输用行运种时频出户;行低钟的C用P当;功,系软U该当耗以数时件位该模使。钟清值位式当A;0/,为值。C当DL清为0转该K时0P0换位的S,时正=值方禁,0常为法0止禁进01是该止时行对模该4,;倍该块模C当频位L时块该K;写钟时O位当1U。钟值。T。引为检脚0
2.2.5 外部存储器接口及其操作
1. 外部存储器接口简介
这 里 以 TMS320LF2407A 为 例 介 绍 外 部 存 储 器 接 口 及 其 操 作 , TMS320LF2407A包含2K×16位字的SARAM和544×16位字的片上DARAM, 其中DARAM被分成B0、B1和B2三个单元。通过不同的设置,可将SARAM 和DARAM的B0单元用作程序存储器,又可将它们用作数据存储器。当系统 用慢速的程序存储器存放程序时,为提高运行速度,通常将程序放到SARAM 和DARAM的B0单元中;此时这部分RAM映射到程序空间。对于许多应用来 说,仅有的SRAM是不够的,需要进行扩展来作为程序存储器或数据存储器。
TMS320C55X dsp原理及应用 汪春梅新的第2章

一、累加器AC0~AC3 二、变换寄存器 三、T寄存器 四、用于寻址数据地址空间和I/O空间的寄存器 五、程序流寄存器 六、中断管理寄存器 七、循环控制寄存器 八、状态寄存器
TMS320C55x的CPU寄存器
一、累加器AC0~AC3
思考题:什么是堆栈指针SP(stack pointer)? 答:
思考题:堆栈的生成方向如何? 答:堆栈的生成方向是: The stacks grow from high addresses to low addresses. 即:CPU在每推入一个值到数据堆栈以前,减小SP的值;从数据堆 栈弹出一个值以后,增加SP的值。在堆栈操作中,SPH的值不变。
DPH
XDP的高段部分
四、用于寻址数据地址空间和I/O空间的寄存器
5. 数据页寄存器( XDP/DP)
(1)在DP直接寻址模式下,XDP指定一个23位地址。
数据页寄存器的功用:
(2) 在k16绝对寻址模式下,DPH和一个16-bit的立即 数构成一个23位的地址。 直接寻址和绝对寻址模式见教材40页。
数,因此用于MAC指令时,优点更加突出。
CDP间接寻址模式和系数间接寻址模式见教材46页,表 3-4、3-5。 例子指令: MOV Smem, Cmem;
MOV *AR3, *CDP; The content addressed by AR3 is copied in the location addressed by the coefficient data pointer register (CDP).
XSP
03H
SPH
2002H
DSP_2
1
第二章 定点DSP芯片TMS320f2812
2.1 TMS320F2812性能特点
2.2 TMS320F2812硬件结构 2.3 TMS320F2812指令系统简介
2
2.1 TMS320F2812性能特点
(1)采用了高性能的静态CMOS技术,时钟频 率可达150MHZ(6.67ns),其核心电压为1.8V,I/O 口电压3.3V,Flash编程电压也为3.3V。 (2)高性能的32位CPU。能够实现16X16和 32X32乘法操作,哈佛总线结构,快速的中断操作,寻 址程序空间可达4M,寻址数据空间可达4G,在C/C++ 和汇编语言中代码可得到优化,另外还可向下兼容 TMS320F24X/LF240X处理器的代码; (3)片上存储器:闪存128K字,单访问双口 RAM(SARAM)18k字; (4)引导(BOOT)ROM4K字,具有软件启动模 式并包含标准的数学表; (5)时钟和系统控制采用锁相环技术PLL来控 3 制系统各模块所需要的频率;
19
2、TMS320F2812的片内外设简介
由于28lx数字信号处理器集成了很多内核可 以访问和控制的外部设备,28lx内核需要通过 某种方式来读/写外设。为此,处理器将所有的 外设都映射到了数据存储器空间,主要包括配 置寄存器、输入寄存器、输出寄存器和状态寄 存器。每个外设只要通过简单的访问存储器中 的寄存器就可以使用该设备。外设通过外设总 线(PBUS)连接到CPU的内部存储器接口上,如 图2-12 所示。所有的外设(包括看门狗和CPU时 钟)在使用前必须配置相应的控制寄存器。
2.2.3 中央 处理单元 (C28x CPU)
1. CPU结构
11
(1)算术逻辑单元(ALU):32位ALU完成2的补 码的算术运算和布尔运算。通常情况下,中央处 理单元对于用户是透明的。例如,完成一个算术 运算,用户只需要写一个命令和相应的操作数据, 读取相应的结果寄存器的数据就可以了。 (2)乘法器:乘法器完成32x32位的2的补码的 乘法运算,产生64位的补码结果。乘法器能够完 成两个符号数,两个无符号数或一个符号数和一 个无符号数的乘法运算。 (3)移位器:完成数据的左移或右移操作,最 大可移16位。在C28lx的内核中,总计有3个移位 寄存器:输入数据定标移位寄存器,输出数据定标 移位寄存器和乘积定标移位寄存器。
DSP原理与应用实验2DSP 数据存取实验

课程名称DSP原理与应用
实验序号实验2
实验项目DSP 数据存取实验实验地点
实验学时实验类型
指导教师实验员
专业班级
学号姓名
年月日
1、装载程序memory.out,进行调试。
运行到main 函数入口:
2、修改程序区的存储单元:
修改前:
此时入口地址为10801200,数据地址为01BCD4F6
修改中:
注意:修改前面的入口地址之后,一定要重新设置数据存储地址修改后:
当前语句被改成了“NOP”。
将地址0x10801200 上的数据改回0x01BCD4F6,程序又恢
复成原样。
3、断点调试:
(1)、运行到第一个断点:
我们可以memory 窗口中从0x80000080 开始的16 个单元的值被写入0x00000000 到0x0000000。
(2)、运行到第二个断点:
我们可观察到memory 窗口中从0x80000100 开始分16 个单元中的值被均被写入0x00001234。
(3)、运行到第三个断点:
我们可以观察到0x80000080 开始的16 个单元的值复制到以0x80000100 开始的16 个单元,数据发送了变化,因此数据颜色变为红色。
dsp实验报告 2
DSP图像处理实验报告组员:张海星通信1107班陈淑菁通信1103班手势识别1.题目分析不同的手势出现在屏幕上会显示手势的名字,找出不同手势在屏幕上显示的特点,用这个特点来区分出手势的名称,同时将名称显示在屏幕的左下角。
2.步骤:(1)找特征:用运肤色检测的程序调试出来的显示屏幕上图像的特征我们发现肤色的面积大小会随着不同手势透出的皮肤面积的大小而变化,因此我们利用面积的大小来判断不同的手势,并将其名称显示在屏幕的左下角。
(2)采集图像:我们组用石头和剪刀两个手势。
首先用loop2的显示采集两个手势的图像。
在save data 中保存图像的数据,从程序中找到图像的首地址,保存数据的首地址为:OX80000000,图像的大小设置为720*288/4。
然后利用matlab程序读图像并计算框的面积大小的值。
读图程序:% dat文件是由CCS保存的数据文件% dat文件中每个像素用8bit表示,% 0x245A3654表示第一个像素的值为0x54;第二个像素的值为0x36% 第三个像素的值为0x5A;第四个像素的值为0x24% 本例以图像大小为640*240,请根据你的实际做修改% 在使用本程序前请手动删除dat文件的第一行clc;clear all;close all;imagedata=zeros(720,288);% ------------------------------- 低温---------------------------------------I = importdata('C:\Documents and Settings\Administrator\桌面\s1.dat');[M,N] = size(I);for i=1:720*288/4a=cell2mat(I(i));imagedata(i*4) = hex2dec(a(3:4));imagedata(i*4-1) = hex2dec(a(5:6));imagedata(i*4-2) = hex2dec(a(7:8));imagedata(i*4-3) = hex2dec(a(9:10));endimagedata = uint8(imagedata');imshow(imagedata,[0,720])用matlab计算面积值的程序:将图像中手势出现的范围截框,在算出像素点的值就是面积大小。
DSP2
1:微处理器的发展方向:20世纪70年代微处理器问世以来,一直沿着3个方向发展。
这三类微处理器各有其特点。
虽然在技术上不断借鉴和交融,但又有各自不同的应用领域。
☉CPU:微型计算机中央处理器。
(如:奔腾等)☉MCU:单片微型计算机(如MCS-51,MCS-96等)☉DSP:可编程的数字信号处理器。
:2:模拟系统或者数字系统可处理哪些信号:模拟信号处理系统从根本上说是实时的;模拟系统:除开电路引入的延时外,处理是实时的数字系统:由计算机的处理速度决定射频信号的处理还要由模拟系统来完成。
模拟系统:可以处理包括微波毫米波乃至光波信号数字系统:按照奈奎斯特准则的要求,受S/H、A/D和处理速度的限制3:哈佛结构:冯·诺伊曼结构,也称普林斯顿结构,是一种将程序指令存储器和数据存储器合并在一起的存储器结构。
程序指令存储地址和数据存储地址指向同一个存储器的不同物理位置,因此程序指令和数据的宽度相同,如英特尔公司的8086中央处理器的程序指令和数据都是16位宽。
哈佛结构是一种将程序指令存储和数据存储分开的存储器结构。
中央处理器首先到程序指令存储器中读取程序指令内容,解码后得到数据地址,再到相应的数据存储器中读取数据,并进行下一步的操作(通常是执行)。
优点:程序指令存储和数据存储分开,可以使指令和数据有不同的数据宽度,如Microchip公司的PIC16芯片的程序指令是14位宽度,而数据是8位宽度。
4::240芯片的供电电压和功耗:高性能静态CMOS技术,供电电压3.3V,时钟周期33ns,指令执行速度30MIPS。
看门狗(WD)定时器模块。
10位的ADC转换器:两个8通道或一个16通道。
CAN2.0B模块。
串行通讯接口(SCI)模块16位串行外部设备接口(SPI)模块。
基于锁相环(PLL)的时钟发生器。
41个可单独编程或复用的通用I/O引脚5个外部中断(两个驱动保护、复位和;两个可屏蔽中断)具有三种低功耗模式的电源管理模块。
DSP计数器 DSP定时器 计数器原理及设计举例
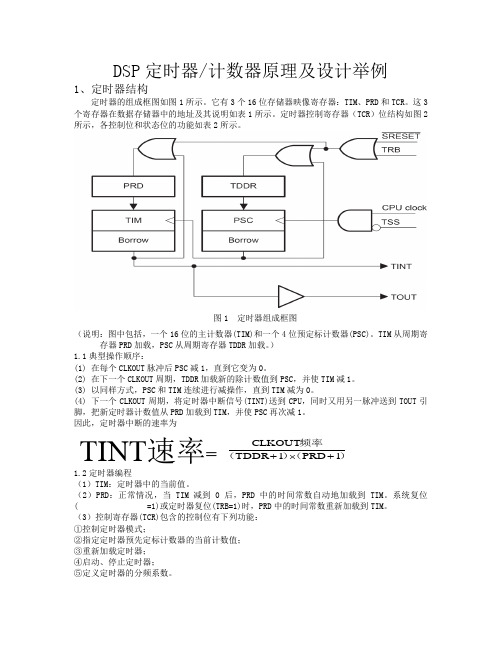
DSP 定时器/计数器原理及设计举例1、定时器结构定时器的组成框图如图1所示。
它有3个16位存储器映像寄存器:TIM 、PRD 和TCR 。
这3个寄存器在数据存储器中的地址及其说明如表1所示。
定时器控制寄存器(TCR )位结构如图2所示,各控制位和状态位的功能如表2所示。
(说明:图中包括,一个16位的主计数器(TIM)和一个4位预定标计数器(PSC)。
TIM 从周期寄存器PRD 加载,PSC 从周期寄存器TDDR 加载。
) 1.1典型操作顺序:(1) 在每个CLKOUT 脉冲后PSC 减1,直到它变为0。
(2) 在下一个CLKOUT 周期,TDDR 加载新的除计数值到PSC ,并使TIM 减1。
(3) 以同样方式,PSC 和TIM 连续进行减操作,直到TIM 减为0。
(4) 下一个CLKOUT 周期,将定时器中断信号(TINT)送到CPU ,同时又用另一脉冲送到TOUT 引脚,把新定时器计数值从PRD 加载到TIM ,并使PSC 再次减1。
因此,定时器中断的速率为1.2定时器编程(1)TIM :定时器中的当前值。
(2)PRD :正常情况,当TIM 减到0后,PRD 中的时间常数自动地加载到TIM 。
系统复位( =1)或定时器复位(TRB=1)时,PRD 中的时间常数重新加载到TIM 。
(3)控制寄存器(TCR)包含的控制位有下列功能: ①控制定时器模式;②指定定时器预先定标计数器的当前计数值; ③重新加载定时器; ④启动、停止定时器; ⑤定义定时器的分频系数。
图1 定时器组成框图TINT 速率=)()(频率1PRD 1TDDR CLKOUT +⨯+(说明:TDDR(Timer Divide-Down Ratio):复位时,TDDR 各位清零;PSC(Timer Prescaler Counter):PSC 可被TCR 读取,但不能直接写入) 1.3定时器初始化步骤:(1) 将TCR 中的TSS 位(停止状态位)置1,关闭定时器。
DSP学习2)CPU内部结构解读

DSP学习2)CPU内部结构解读CPU(中央处理器)是计算机中最重要的组件之一,它负责执行计算机程序中的指令和处理数据。
了解CPU的内部结构可以帮助我们更好地理解计算机的工作原理和优化程序的性能。
本文将对CPU的内部结构进行解读。
首先,CPU由三个主要组件组成:控制单元(Control Unit)、算术逻辑单元(Arithmetic Logic Unit, ALU)和寄存器(Registers)。
控制单元是CPU的大脑,它负责控制计算机的各个部分协同工作。
它通过解码和执行指令集来控制程序的执行顺序。
控制单元将从内存中读取的指令进行解码,并将其转换为控制信号,以便与其他部件进行通信。
它还负责执行分支和跳转指令,以便根据程序的逻辑流程进行控制。
算术逻辑单元(ALU)是CPU中用于执行算术和逻辑运算的部分。
它能够进行基本的数学运算(如加法、减法、乘法、除法)以及逻辑运算(如与、或、非和异或)。
ALU的特点是速度非常快,这使得CPU能够在极短的时间内完成大量的数学和逻辑运算。
寄存器是CPU中用于临时存储数据和指令的地方。
它们是CPU内部的存储区域,所以它们的访问速度非常快。
CPU中有多个寄存器,每个寄存器都有特定的用途。
比如,累加器是一个通用寄存器,用于存储和操作临时数据。
指令寄存器存储当前正在执行的指令。
程序计数器(PC)存储下一条要执行的指令的地址。
寄存器的数量和功能因CPU的型号而异。
除了以上三个主要组件外,CPU还包含诸如时钟、总线接口、高速缓存等辅助组件。
时钟是CPU中的一个定时器,它以固定的频率向CPU发出脉冲信号,用于同步各个组件的工作。
总线接口是CPU与其他设备(如内存、硬盘、显卡等)进行通信的接口。
高速缓存是位于CPU和内存之间的一种临时存储器,它可以存储最常用的数据和指令,以加快CPU访问数据的速度。
为了提高CPU的性能,现代CPU还引入了一些高级技术和特性。
例如,流水线技术可以将指令的执行过程划分为多个步骤,并同时执行多条指令,从而提高整体的执行效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2020/9/30
第2章 DSP芯片结构介绍
•什么是定标 •移位处理的作用 •归一化的作用 •为何要扩展符号位
当数据存储器 的数据送入累 加器或与累加 器中的数据进 行运算时,先 通过它进行 0~16位左移然 后再进行运算。
若OVM=0,直接将结果回到累加器。
2020/9/30
第2章 DSP芯片结构介绍
•ALU如何获取数据 •ALU输出送往何方 •溢出怎么办 •进位位的作用
可以用来支持扩展 精度的算术运算, 利用两个条件操作 数C和NC,可以根 据进位位的状态, 进行分支转移、调
用与返回操作。
•什么是双16位算术运算
存储单元转换
2020/9/30
第2章 DSP芯片结构介绍
14)锁相环(PLL)发生器 15)多通道缓冲串口(McBSP) 16)直接存储器访问(DMA)控制器 17)主机接口(HPI) 18)定时器(16位) 19)多种节电模式 20)JTAG接口 21)低电压工作
2020/9/30
行处理
2020/9/30
第2章 DSP芯片结构介绍
溢出处理:ALU的饱和逻辑可以处理溢出。 当发生溢出、且状态寄存器ST1的OVM=1时, 则用32位最大正数00 7FFFFFFFh(正向溢出) 或最大负数FF 80000000h(负向溢出)加载 累加器。
溢出发生后,相应的溢出标志位(OVA或 OVB)置1,直到复位或执行溢出条件指令。 也可用SAT指令对累加器进行饱和处理而不 必考虑OVM值。
DSP原理及应用
电子信息工程系
主讲教师:张健
第2章 DSP芯片结构介绍
第二章 DSP芯片结构介绍
第一节基本性能 第六节串行口 第二节CPU结构 第七节与外设的接口 第三节内部总线结构 第八节复位与省电 第四节存储器结构 第九节中断 第五节在片外围电路 第十节自举加载
2020/9/30
第2章 DSP芯片结构介绍
2020/9/30
第2章 DSP芯片结构介绍
•ALU如何获取数据 •ALU输出送往何方 •溢出怎么办 •进位位的作用 •什么是双16位算术运算
只要置位ST1的 C16状态位,就 可让ALU在单个 周期内进行特殊 的双16位算术运 算,亦即进行两 次16位加法或两 次16位减法。
2020/9/30
高位字存入TEMP,; TEMP=FF43h STL A,8,TEMP ;A中的内容左移8位后低位; 字存入TEMP,TEMP=3400h STL A,-8,TEMP ;A中的内容右移8位后低位; 字存入TEMP,TEMP=2112h
2020/9/30
第2章 DSP芯片结构介绍
3. 桶形移位寄存器
第2章 DSP芯片结构介绍
第二节 C54x芯片的CPU结构
2020/9/30
C542的结构框图
第2章 DSP芯片结构介绍
包括:
40位算术逻辑运算单元(ALU) 2个40位累加器A和B 移位-16~30位的桶形移位寄存器 乘法器/加法器单元比较和选择及存储
单元(CSSU) 指数编码器 CPU状态和控制寄存器
第2章 DSP芯片结构介绍
2. 累加器A和B
•作用
存放运算 前后数据
•结构与位置
•A和B的异同
•加载与存储中的移位
2020/9/30
第2章 DSP芯片结构介绍
•作用 •结构与位置 •A和B的异同
累加器A和 B的差别仅 在于累加器 A的31~16位 可以用作乘 法器的一个
输入。
•加载与存储中的移位
第2章 DSP芯片结构介绍
ALU的输入:ALU有两个输入端,X输入端的 数据来源于移位寄存器的输出(32位或16位数 据存储器操作数以及累加器中的数值,经移位 寄存器移位后输出)或来自数据总线DB 的数 据存储器操作数。
Y输入端的数据来源于累加器A中的数据,或 累加器B中的数据,或来自数据总线CB的数据 存储器操作数,或来自T寄存器中的数据。
当一个16位数据存储器操作数加到40位ALU的 输入端时,若状态寄存器ST1的SXM=0,则高 位添0,若SXM=1,则符号位扩展。
2020/9/30
第2章 DSP芯片结构介绍
•ALU如何获取数据 •ALU输出送往何方 •溢出怎么办 •进位位的作用 •什么是双16位算术运算
根据ST1的 OVM位进
2020/9/30
第2章 DSP芯片结构介绍
例如:累加器A=FF 4321 1234h,求执行带移位的STH和 STL指令后,数据存储单元的TEMP中的结果。
STH A,8,TEMP ;A中的内容左移8位后; 高位字存入TEMP,
;TEMP=2112h STH A,-8,TEMP ;A中的内容右移8位后;
2020/9/30
第2章 DSP芯片结构介绍
2020/9/30
C542的结构框图
第2章 DSP芯片结构介绍
1. 算数逻辑运算单元
•ALU如何获取数据
•ALU输出送往何方
X输入端 Y输入端
•溢出怎么办
输出为40位,
•进位位的作用
被送往累加
器A或B
•什么是双16位算术运算
2020/9/30
依指令而定2020/9/30来自第2章 DSP芯片结构介绍
保存累加器的内容:用户可以利用STH、 STL、STLM和SACCD等指令或者用并 行存储指令,将累加器的内容存放到数 据存储器中。
在存储前,有时需要对累加器的内容进 行移位操作。右移时,AG和BG中的各 数据位分别移至AH和BH;左移时,AL 和BL中的各数据分别移至AH和BH,低 位添0。
第一节 C54x芯片的基本性能
2020/9/30
第2章 DSP芯片结构介绍
1)多总线结构 2)40位算术逻辑单元(ALU) 3)17×17位并行乘法器 4)比较、选择和存储单元(CSSU) 5)指数编码器 6)两个地址发生器
2020/9/30
第2章 DSP芯片结构介绍
7)数据总线 8)总线寻址空间 9)三种存储器空间 10)单指令循环和块循环 11)区分的存储块移动指令 12)32位长操作数指令 13)可编程等待状态发生器和可编程的
2020/9/30