基于CAN通信的电动汽车BMS上位机管理系统
CAN通信下的电动汽车上位机系统开发

CAN通信下的电动汽车上位机系统开发提纲:1. CAN通信的基本原理及在汽车上位机系统中的作用2. 电动汽车上位机系统的开发流程与注意事项3. CAN通信中数据传输与处理的技术及其优化策略4. 电动汽车上位机系统开发中的市场需求和未来发展方向5. 实际案例分析:国内外电动汽车上位机系统的开发及应用提纲一:CAN通信的基本原理及在汽车上位机系统中的作用CAN(Controller Area Network)通信是一种高可靠性、高带宽、多主从并行通信的网络协议,早期用于汽车工业中,现已逐渐被广泛应用于控制领域。
CAN总线可以实现多设备的通信和控制,能够满足汽车电子系统对实时性、高可靠性的需求。
在电动汽车上位机系统中,CAN总线承担了重要的通信作用,实现了各个电子模块之间的信息交互和协作。
本部分内容将对CAN通信的基本原理、数据传输模式和在汽车系统中的应用作简要介绍。
CAN通信的基本原理CAN是一种基于广播式共享媒体和分时多路复用通信的总线协议。
CAN节点之间的通信是通过CAN总线完成的,总线上可以同时存在多个节点,节点之间通过标识符进行数据交换。
CAN总线的数据链路层采用了对等的生产者-消费者机制,所有节点都可以作为数据发送节点,同时也可以是数据接收节点。
当某个节点发送数据时,所有节点都会接收到数据,但只有ID符合自身设定的节点才会处理数据。
此外,CAN通信还包含了帧同步和CRC校验等措施,保证了通信的可靠性和数据的完整性。
CAN通信在汽车上位机系统中的作用在电动汽车的控制系统中,CAN总线起到了重要的作用。
在整个电动汽车控制系统中,各种传感器、操控器以及执行器均需要通过CAN总线进行数据的交换和控制指令的传递。
以电机控制器为例,其需要通过CAN总线和电动汽车控制器进行数据交互,判断电机是否正常开启、控制电机的转速和电流等;同时,电动汽车控制器也需要获取电机的相关数据,用于反馈车辆加速度、制动力等信息,实现整车控制。
基于CAN总线的混合动力汽车电池管理系统研究
管理 系统 、 电压 调节 系统 和低 电源管 理 系统这 3个 系 统组 成 的。 动力 电池 组管 理系 统主 要是 对动 力 电池组 的
充 电 电流 、放 电电流 、电压 、放 电深度 、再 生制 动反馈 的 电流等 进行控 制 ,以防止 电池 的过充 电或 过放 电, 判
混 合动 力汽 车 的开发 过程 中 , 电池 管理 系统 设计 是其 定荷 电状 态 , 择 适 当的充 电模 式和放 电模 式 ,对 电池 其 选
垄 窒
De el ng e e c v opi R s ar h
基 于 C N总线 的混合动力汽车 电池 A 管理 系统研 究
牛 国华 ,李孟 良 ,徐达
(. 武汉 理工 大学 ;2 中国汽 车 技术研 究 中心 ) 1 . 摘 要 :针 对混 合动 力汽 车 电池 管理 系统 的特 点 ,设计 了基于 控制 器局 域 网 (A ) CN 总线 的混合 动汽 车 电
保节 能和 廉价 等方 而取 得重 大 发展 , 仍 受能源 节 能环 但 混 合 动 力 汽车 整 车 能 量管 理 系 统 是 由动 力 电池 组
保 等方 而 的限制 。所 以,人们把 日光投 向 电动 汽车 。在 目前还 找不 到理想 电特 性 的车载 电源 之 时 , 混合 动 力汽 车将 是 解决 汽车排 放 与能源 问题 的有 效途 径之 一 。 而在
重 点滩 点之 一 。
进行 均衡 地 充 电、放 电 ,控 制 并且平 衡 电池组 的 工作 ,
使各 个 电池 发挥 出最优 性 能 , 根据 电机 的需要 控 制输 并
开 发 研 究
出 电能 ,使 电机 能够输 出其 日标 功 率 。低压 电源 管 理系 会 丢 失数据 。 由于 内部 集成 了 A / D转换 器和 独立 C N A
纯电动汽车电池管理系统BMS标定规范

纯电动车电池包项目电池管理系统标定规范目录1、电池管理标定系统的定义、参数及类型 (3)1.1定义 (3)1.2、标定的参数 (3)1.3、电池管理标定系统的类型 (3)2、电池管理标定系统 (3)2.1、电池管理系统组成 (3)2.2、电池管理标定系统的功能 (3)2.3、电池管理标定系统的总体结构设计 (4)2.4、电池管理标定系统的软件设计 (4)3、参数配置与标定方案 (4)3.1、系统参数配置 (4)3.1.1、参数配置内容 (4)3.1.2、参数配置方式 (5)3.1.3、参数配置系统拓扑图 (5)3.2、系统参数标定 (5)3.2.1、参数标定内容 (5)3.2.2、参数标定方式 (5)3.2.3、参数标定系统拓扑图 (6)3.3、系统测试 (6)3.3.1、系统测试内容 (6)3.3.2、系统测试方式 (7)3.3.3、系统测试拓扑图 (8)1、电池管理标定系统的定义、参数及类型1.1定义电池管理系统是一个很复杂的控制系统,为了使电池管理系统在最优条件下工作并且能与汽车上其他系统协调工作,并达到最佳的综合性能,必须对电池控制器的控制参数进行相应的修改和优化,使电池控制系统按照最优的控制参数运行,这个过程称为标定。
1.2、标定的参数电池管理系统最主要的功能是有效控制电池的充电和放电,防止电池过度充电或过度放电,所以需要标定的参数有电压、电流、充放电功率、温度和各种故障阈值等。
1.3、电池管理标定系统的类型(1)离线标定由于编程过程中电池充放电控制模块无法获得实时的参数,必须在充电或者放电停止后才能进行更改数据的操作,该标定方式为离线标定。
(2)在线标定在线标定变量可同时以数值或图形等多种形式显示,实时监测的变量以曲线形式显示,标定平台修改的标定参数可通过CAN协议在标定系统通信模块中实时传递至任一ECU中,通过ECU的控制程序控制执行器,执行结果可通过监测曲线实时反应。
2、电池管理标定系统2.1、电池管理系统组成电池管理标定系统主要包括以下几个部分:(1)动力电池;(2)电池管理系统;(3)电池管理系统标定系统的硬件:其组成结构主要包括标定用的PC机、USBCAN通信;(4)电池管理系统标定系统的软件:包括CCP协议的驱动程序,电池管理系统支持CCP 协议的应用程序及支持CCP协议应用的标定平台软件;2.2、电池管理标定系统的功能标定系统需要具备以下的基本功能:(1)数据的采集,能够完成电池管理系统测试和控制的信号的实时采集,从而完成动力电池的工作状态的监控。
纯电动车BMS与整车系统CAN通信协议

文件类型:技术类密级:保密正宇纯电动车电池管理系统与整车系统CAN通信协议(GX-ZY-CAN-V1.00)版本记录版本制作者日期说明V1.00 用于永康正宇纯电动车系统姓名日期签名拟定审查核准1 范围本标准规定了电动汽车电池管理系统(Battery Management System ,以下简称BMS)与电机控制器(Vehicle Control Unit ,简称VCU)、智能充电机(Intelligent Charger Unit ,简称ICU)之间的通信协议。
本标准适用于电动汽车电池管理系统与整车系统和充电系统的数据交换。
本标准的CAN 标识符为29位,通信波特率为250kbps 。
本标准数据传输采用低位先发送的格式。
本标准应用于正宇纯电动轿车电池管理系统。
2 规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的版本适用于本文件。
凡不是注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
ISO 11898-1:2006 道路车辆 控制器局域网络 第1部分:数据链路层和物理信令(Road Vehicles – Controller Area Network (CAN) Part 1:Data Link Layer and Physical Signalling). SAE J1939-11:2006 商用车控制系统局域网络(CAN)通信协议 第11部分:物理层,250Kbps ,屏蔽双绞线(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 11:Physical Layer,250Kbps,Twisted shielded Pair). SAE J1939-21:2006商用车控制系统局域网络(CAN )通信协议 第21部分:数据链路层(Recommanded Practice for a Serial Control and Communications Vehicle Network Part 21:Data Link Layer).3 网络拓扑结构说明电动汽车网络采用CAN 互连结构如下所示,CAN1总线为电池管理系统与电机控制器之间的数据通信总线,CAN2总线为电池管理系统与充电机之间的数据通信总线。
基于CAN通信的电动汽车上位机系统开发
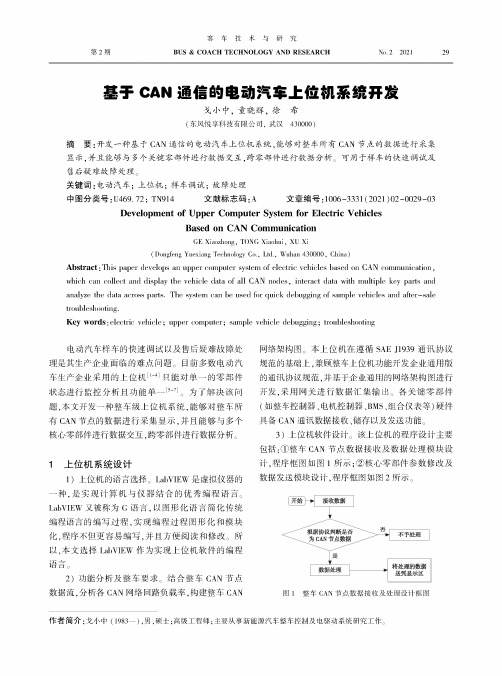
第2期客 车 技 术 与 研 究BUS & COACH TECHNOLOGY AND RESEARCH No. 2 202129基于CAN 通信的电动汽车上位机系统开发戈小中,童晓辉,徐希(东风悦享科技有限公司,武汉430000)摘 要:开发一种基于CAN 通信的电动汽车上位机系统,能够对整车所有CAN 节点的数据进行采集显示,并且能够与多个关键零部件进行数据交互,跨零部件进行数据分析。
可用于样车的快速调试及售后疑难故障处理。
关键词:电动汽车;上位机;样车调试;故障处理中图分类号:U469. 72; TN914文献标志码:A文章编号:1006_3331(2021)02_0029_03Development of Upper Computer System for Electric VehiclesBased on CAN CommunicationGE Xiaozhong , TONG Xiaohui , XU Xi( Dongfeng Yuexiang Technology Co., Ltd., Wuhan 430000, China)Abstract : This paper develops an upper computer system of electric vehicles based on CAN communication ,which can collect and display the vehicle data of all CAN nodes , interact data with multiple key parts andanalyze the data across parts. The system can be used for quick debugging of sample vehicles and after_sale troubleshooting.Key words : electric vehicle ; upper computer ; sample vehicle debugging ; troubleshooting电动汽车样车的快速调试以及售后疑难故障处理是其生产企业面临的难点问题。
基于CAN总线的电动车控制系统设计

基于CAN总线的电动车控制系统设计当前全球汽车工业面临金融危机和能源环境问题的巨大挑战,实现汽车能源动力系统的电气化,已经成为汽车产业的趋势。
提高电动汽车上的各个控制单元间通信的可靠性和实现高传输速率,选择CAN总线协议。
CAN总线为多主工作方式,网络上任何节点均可在任意时刻向其他节点发送信息。
它采用非破坏性的基于优先权的总线仲裁技术,可靠性高。
CAN总线通信距离长达10 km,通信速率最高可达1 Mb/s。
CAN通信系统抗干扰性好,工作稳定。
某个节点出现故障,不会导致整个系统通信的不正常。
由于采用短帧的报文结构,数据传输时间短,具有很强的抗干扰性,具有高效的非破坏总线仲裁,出错检测和故障自动关闭等优点。
1 控制系统整体结构电动车控制系统由电池管理、充电机、电动机和整车控制等模块组成。
本系统总体结构如图1所示。
由图1知,CAN通信网络上共有4个通信节点。
整车控制器接收BMS、CCS、电机控制器的报文提供的各种参数;充电机接收BMS发送的控制信息并根据报文数据的电压电流设置来工作;电机控制器接收BMS发送的电池状态信息设置来工作,同时电机控制器接收由整车控制器发送的控制信息并根据报文数据的转矩设置来工作。
2 CAN总线节点的硬件电路设计整车控制模块这一节点所实现的功能主要是接收其他节点的数据信息,通过控制算法等进行数据处理,然后发送控制信息给电机控制器,从而实现电动车的正常功能运行。
整车控制节点是基于STM32F103VE设计的。
ARMCortex TM-M3是一款高性能、低成本、低功耗的32位BISC处理器,可在高达72 MHz的频率下运行,拥有512 KB的片内Flash程序存储器,具有64 KB的RAM数据存储器,可进行高性能的CPU访问。
该徽控制器包含1个USB2.0全速(12 Mb/s)设备、1路CAN2.0B 通道、1个通用DMA控制器、3个16位的A/D转换器和1个16位的D/A转换器。
基于CAN总线的电动汽车控制系统设计

基于CAN总线的电动汽车控制系统设计本文介绍将CAN总线技术应用到电动汽车控制系统,并采用通用扩展单元解决了电动汽车电控系统的电路设计复杂性的问题,优化了组合各电控单元信息以实现充分信息共享,从而达到提高电动汽车控制系统性能的目的。
一、前言CAN总线是德国BOSCH公司在20世纪80年代初为解决汽车中众多的控制与测试仪器之间的数据交换而开发的一种通信协议。
由于CAN总线具有突出的可靠性、实时性和灵活性,因而得到了业界的广泛认同和运用,并在1993年正式成为国际标准和行业标准,被誉为“最有前途的现场总线”之一。
以CAN为代表的总线技术在汽车上的应用不但减少了车身线束,也提高了汽车的可靠性。
在国外现代轿车的设计中,CAN已经成为必须采用的技术,奔驰、宝马、大众、沃尔沃及雷诺等汽车都将CAN作为控制器联网的手段。
我国目前CAN总线技术在汽车上的应用存在着很大的空白,在电动汽车上应用CAN总线技术研究尚处于起步阶段。
电动汽车融合了许多的电子控制系统,如电池管理系统、电机控制系统、驱动控制系统、再生制动系统及ABS系统等。
电子设备的大量应用,必然导致车身布线增长且复杂、运行可靠性降低、线路上的功率损耗加大、故障维修难度增大。
特别是电子控制单元的大量引入,为了提高信号的利用率,要求大批的数据信息能在不同的电子单元中共享,汽车综合控制系统中大量的控制信号也需要实时交换,传统线束已远远不能满足这种需求。
将CAN总线动汽车控制系统,并采用通用扩展单元解决电动汽车电控系统的电路设计复杂性的问题,优化组合各电控单元信息以实现充分信息共享,达到提高电动汽车控制系统性能的目的。
二、CAN的发展背景(一)CAN的起源现代社会对汽车的要求不断提高,这些要求包括:极高的主动安全性和被动安全性;乘坐的舒适性;驾驶与使用的便捷和人性化;尤其是低排放和低油耗的要求等。
在汽车设计中运用微处理器及其电控技术是满足这些要求的最好方法,而且已经得到了广泛的运用。
基于CAN总线智能动力电池数据采集监控系统设计

中图分类号:TP274
文献标识码:A
文章编号:1672-545X(2019)01-0162-04
0 引言
汽车工业的发展极大地推动了工业的进步和经 济技术的提高,然而随着传统燃油汽车工业的发展, 环境污染问题,能源危机问题日益严重。为了降低燃 油车辆产生的温室气体 CO2 等对环境的危害,减少 对不可再生能源的使用,保护生态环境,越来越多的 车辆专业工程师、汽车厂商着手于对新能源汽车的 研究并得到国家的大力支持。采用非常规的车用燃 料作为汽车的动力来源是新能源汽车的主要特点之 一,新能源汽车的出现,使得汽车产业朝着电动化、 智能化、轻量化和网联化的方向发展。
LT4363
3 硬件电路设计
基于 CAN 总线的智能动力电池数据采集终端是 典型的嵌入式设备之一,包括硬件电路和软件固件 两个部分,硬件电路部分有电源转换,2G 电路,GPS 电路等,软件固件是整个硬件电路的逻辑控制,如根 据 SOC,计算每日行里程的电耗量等。 2.1 电源转换电路部分
电源是智能动力电池数据采集终端主要模块之 一,好的电源设计可以提升数据采集系统的整体性 能。电源模块部分除了给系统提供所需的稳定的电 压电流外,还应该具有保护系统的功能,如过压保 护、欠压保护、防浪涌保护,防反接保护等。为了保障 数据采集终端在动力电池出现异常之后能够继续工 作,上报动力电池数据,因此在终端上添加备用电 池。备用电池和主电源之间能够无缝切换。当主电源 提供的电源在系统工作电源范围内时,数据采集系 统通过主电源供电,并且主电源给备用电池充电。当 主电源出现故障之后备用电池为数据采集系统供 电,这样实现了对管理电池的实时监控,电源转换电 路结构图见图 4。 2.2 CAN 收发电路部分
纯电动汽车(Blade Electric Vehicles,BEV)是新能 源汽车中普及范围较广的一类新型汽车。纯电动汽 车采用单一的动力电池作为储能动力源,通过动力 电池向电动机提供电能,驱动电动机运转,从而推动 汽车行驶。由此可见动力电池是纯电动汽车的关键 零部件之一。动力电池的性能影响着车辆的整体性 能。电池管理系统(Battery Management System,简称 BMS)是对动力电池进行监控和管理的系统,通过对 动力电池电压、电池电流、电池温度以及电池剩余电 量 SOC 等参数采集、计算,进而控制电池的充放电过 程,实现对电池的保护,提升电池综合性能的管理系 统,是连接车载动力电池和电动汽车的重要纽带[1], 但是现在的大多数的 BMS 系统不具备电池远程监控 功能,电池出厂之后供应商不能够随时监控电池状
BMS-基于CAN总线电动汽车电池管理系统

摘要
随着能源消耗的增加和石油资源的减少,新能源汽车的发展越来越受到 各国政府和各大汽车公司的重视,竞相投资研发新技术。其中,纯电动汽车 是新能源汽车研究的主要方向。电池管理系统( BMS )作为动力电池组管 理和保护的核心部件,成为各研究机构的攻关对象。本课题的主要任务是研 究 BMS 的单体电压检测、温度监测、 CAN 总线网络通信和电池剩余电量 SOC 值预测。 在分析研究国内外公开文献中的 BMS 基础上,根据课题的要求,设计 了一套工作有效的 BMS ,实现了分布式温度监测、 CAN 总线网络通信和 SOC 值得预测。主要研究内容及成果如下: (1) 放弃模拟多路开关监测方案,设计了采用 12 路 A/D 电路采集电压 信号。经过测试,系统能安全可靠地测量总电压 15V 的电池组单体电压, 测量精确在 1.5mV。从理论上分析,系统也能测量单节容量 60Ah、总电压 320V 动力电池组单体电池电压,并且每次测量过程都能够在 120ms 内完 成。 (2) 实现了对每个电池包的分布式多点温度监控,温度传感器可方便地 扩充,能够在 1s 内完成所有温度点的测量,测量范围为 0℃-125℃,精度为 0.25℃。 (3) 研究了 BMS 内部 CAN 总线网络的分布式系统数据传输,研究了 BMS 外部 CAN 总线接口与整车控制器的高速 CAN 总线通信。实现了子控 制板通过内部 CAN 总线网络向主控制板的数据传输。 (4) 研究了锂电池的 SOC 值预测。通过分析比较不同 SOC 值预测方法 之间的利弊,采用了开路电压法和安时法两种方法结合,能够有效地获取相 对准确的 SOC 值。 关键词: BMS; LTC6802;温度检测; CAN 通讯; SOC 预测
IILeabharlann xxx 大学本科毕业设计(论文)
基于CAN总线的BMS监控系统的设计

基于CAN总线的BMS监控系统的设计吕晓涛;杜艳红【摘要】电动汽车中电池管理系统(BMS)是决定电池寿命和车辆安全的关键技术,为了促进BMS电池管理系统的开发,设计了一种基于LabVIEW和CAN总线的汽车BMS监控系统,可以实时监测和修正BMS的运行参数。
试验结果表明,系统可以正常工作,可实时监控BMS运行参数,提供了可视化的监控平台。
【期刊名称】《科技与创新》【年(卷),期】2018(000)014【总页数】2页(P135-136)【关键词】CAN总线;电池管理系统(BMS);LabVIEW;汽车【作者】吕晓涛;杜艳红【作者单位】天津农学院工程技术学院,天津300384;天津农学院工程技术学院,天津300384;【正文语种】中文【中图分类】U469.72近20年来,随着现代电子的快速发展,大量电子元器件在汽车上被应用。
为了满足汽车各个子系统对汽车运行参数的共享和实时性的要求,CAN总线逐渐成为当代汽车普遍使用的总线协议。
而随着电动汽车的不断发展,电池管理系统这个名词也逐渐为大家所熟悉,作为电动汽车的核心部件——电池管理系统可对电池组进行安全监控及有效管理,提高电池的效率,进而增加续航里程、延长使用寿命、降低运行成本,进一步提高电池组的可靠性。
本文针对电池管理系统的安全、高效运行,开发出基于CAN总线的BMS监控系统平台,实现了汽车的自动化,同时大大降低了生产成本。
1 系统结构电池管理系统主要用于电池单元的保护、充放电控制、电池组总电压、总电流的检测、电池模块温度的检测、SOC和SOH的估算、单体电池电压均衡、系统的故障诊断及热管理等。
系统采用主从式结构,从板将采集到的电池模块的温度通过CAN总线发送到中央控制系统,中央控制系统通过隔离采集系统电池箱的总电压、总电流。
中央控制系统根据采集到的信息对电池包进行热管理及SOC估算,同时将采集的信息通过CAN总线上报给上位机,实现远程监控。
2 BMS监控系统硬件设计2.1 信号采集模块的硬件设计电动汽车蓄电池由32节标称电压3.75 V的单体蓄电池串联而成。