定径机孔型设计公式
等分孔计算公式

等分孔计算公式在机械加工、工程设计和日常生活中,我们经常需要在某一平面上等距离地分布若干个孔或点。
这种分布模式不仅美观,而且在许多应用中也是功能性的要求。
等分孔的计算看似简单,实则包含了一系列的数学原理和公式。
下面我们将详细讨论等分孔计算的基本方法和相关公式。
等分孔计算的核心是确定每个孔的中心位置。
这通常涉及到圆周等分和直线等分两种情况。
圆周等分多用于制作齿轮、法兰盘等回转体零件,而直线等分则常见于直尺、刻度盘等线性测量工具的制作。
圆周等分孔计算在圆周上等分孔,我们首先需要确定圆的半径(R)和需要等分的孔数(N)。
每个孔的中心都将位于从圆心出发、夹角相等的半径上。
夹角的大小可以用以下公式计算:夹角= 360° / N这里,360°代表一个完整的圆周角。
通过等分这个角度,我们可以得到每个孔相对于前一个孔需要旋转的角度。
接下来,为了确定每个孔在笛卡尔坐标系(x, y)中的具体位置,我们需要使用三角函数。
假设第一个孔位于圆的正上方(即y轴上),其坐标为(0, R),那么第n个孔的坐标可以用以下公式表示:x_n = R * cos(n * 夹角* π / 180)y_n = R * sin(n * 夹角* π / 180)这里,cos和sin是余弦和正弦函数,π是圆周率,π / 180是将角度转换为弧度的因子。
直线等分孔计算在直线上等分孔相对简单一些。
首先,确定直线的总长度(L)和需要等分的孔数(N)。
然后,每个孔之间的间隔(d)可以用以下公式计算:d = L / (N - 1)注意这里我们用(N - 1)而不是N,是因为间隔是计算在两个相邻孔之间的。
如果直线的起点是x = 0,那么第n个孔的x坐标就是:x_n = n * d这里不需要三角函数,因为直线等分不涉及角度的计算。
实际应用中的考虑在实际应用中,等分孔的计算可能还需要考虑一些额外的因素。
例如,如果孔是用于螺栓连接的,那么可能还需要考虑螺栓头和螺母的空间,这可能会影响到孔的实际位置。
机械加工时间定额的计算公式和方法

机械加工时间定额的计算公式和方法刨削,插削,磨削,铣削,平面磨削,钻削和铰削,钻盲孔,齿轮加工2、刨削、插削tj——机动时间(min)L——切刀或工作台行程长度(mm)1——被加工工件长度(mm)11——切入长度(mm)12——切出长度(mm)13——附加长度(mm)14——行程开始超出长度(mm)15——行程结束时超出长度(mm)B——刨或插工件宽度(mm)h——被加工槽的深度或台阶高度(mm)U——机床平均切削速度(m/min)f——每双行程进给量(mm)i——走刀次数n——每分钟双行程次数n=(1000×VC)/L×(1+K)注:龙门刨:K=0.4-0.75插床:K=0.65-0.93牛头刨:K=0.7-0.9单件生产时上面各机床K=1①插或刨平面tj=(B+12+13)×i/(f×n)=2×(B×11+12+13)×i/(f×Um×1000)(min) ②刨或插槽tj=(h+1)×i/(f×n)=(h+1)×i×L/(f×Um×1000)(min)注:龙门刨:14+15=350mm牛头刨:14+15=60mm(各取平均值)③刨、插台阶tj=(B+3)×i/(f×n)(横向走刀刨或插)(min)tj=(h+1)×i/(f×n)(垂直走刀刨或纵向走刀插)(min)3、钻削或铰削tj——机动时间(min)1——加工长度(mm)11——切入长度(mm)11——切出长度(mm)f——每转进给量(mm/r)n——刀具或工件每分钟转数(r/min) Φ——顶角(度)D——刀具直径(mm)L——刀具总行程=1+11+12(mm)钻削时:11=1+D/[2×tg(Φ/2)]或11≈0.3P(mm)①一般情况tj=L/f×n(min)②钻盲孔、铰盲孔tj=(1+11)/(f×n)(min)③钻通孔、铰通孔tj=(1+11+12)/(f×n)(min)4、齿轮加工所用符号tj——机动时间(min)B——齿轮宽度(mm)m——齿轮模数(mm)Z——齿轮齿数B——螺旋角(度)h——全齿高(mm)f——每转进给量(mm/r)vf——进给速度(mm/r)g——铣刀线数n——铣刀每分钟转数(r/min)i——走刀次数11——切入长度(mm)12——切出长度(mm)D0——铣刀直径(mm)d——工件节圆直径(mm)f1——工件每转径向进给量(mm)f2——每双行程圆周进给量(mm)t——每齿加工时间(min)nz——加工每齿双行程次数n分——每分钟双行程次数①用齿轮铣刀铣削圆柱齿轮1)铣直齿轮tj=(B+11+12)×Z×i/vf(min)注:(11+12)=d0/(3~4)(mm)2)铣螺旋齿轮tj=(B/cosβ+11+12)×Z×i/vf(min)注:(11+12)=d0/(3~4)(mm)②用齿轮滚刀滚削圆柱齿轮(1)滚切直齿轮tj=(B+11+12)×Z/(g×f×n)(min)注:(11+12)=d0/(3~4)(2)滚切螺旋齿轮tj=(B/cosβ+11+12)×Z/(g×f×n)(min)注:(11+12)=d0/(3~4)③用模数铣刀铣蜗轮tj=(h+11)×Z/f(min)④用蜗轮滚刀径向滚切蜗轮tj=3×m×Z/(g×n×f)(min)⑤用指状铣刀成形铣齿轮tj=(B+0.5d0+12)/(f×n)=(B+0.5d0+12)/vf(min)注:12=2—5(mm)⑥插圆柱齿轮tj=h/(f1×n)+π×d×i/(f2×n)(min)⑦刨齿机刨圆锥齿轮tj=t×Z×i注:式中,t=nZ/n分(min)n分=1000×Vc/2×LL——刀具行程长度(mm)⑧磨齿tj=Z[L/n0(i/f1+212/f2+213/f)+iτ1+2i2τ2+2i3τ3] 将上式查表简化并取平均值为下式tj=Z[L/n0×3.18+0.33](min)式中,L=1+2[h(D-h)+10]1/2——砂轮行程长度(mm)n0——每分钟范成次数D——砂轮直径(mm)h——全齿高i1、i2、i3——粗、半精、精行程次数f1、f2、f3——粗、半精、精每次范成纵向进给量5、铣削所用符号tj——机动时间(min)L=1+11+12工作台行程长度(mm)1——加工长度(mm)11——切入长度(mm)12——切出长度(mm)Vf——工作台每分钟进给量(mm/min)n——铣刀每分钟转数(r/min)B——铣削宽度(mm)i——走刀次数d0——铣刀直径(mm)D——铣削圆周表面直径(mm)αp——切削深度(mm)β——螺旋角或斜角(度)①圆柱铣刀、圆盘铣刀铣平面、面铣刀铣平面 tj=(1+11+12)×i/Vf(min)注:(11+12)=d0/(3~4)(mm)②铣圆周表面tj=D×π×i/vf(min)③铣两端为闭口的键槽tj=(1-d0)×i/vf(min)④铣一端为闭口键槽tj=(1+11)×i/vf(min)⑤铣两端为开口的槽tj=(1+11+12)×i/vf(min)注:11=d0/2+(0.5-1)(mm)12=1-2(mm)⑥铣半圆键槽tj=(1+11)/vf(min)注:1=h——键槽深度(mm)11=0.5-1(mm)⑦按轮廓铣tj=(1+11+12)×i/vf(min)注:1——铣削轮廓长度(mm)11=αp+(0.5-2)12=0-3(mm)⑧铣齿条1)铣直齿条tj=(B+11+12)×i/vf(min)2)铣斜齿条tj=(B/cosβ+11+12)×i/vf(min)注:以上两式中11+12=d0/(3~4)(mm)⑨铣螺纹1)铣短螺纹tj=L/V周(min)注:式中,L=7πd/6(mm)V周——圆周进给速度(mm/min)d——螺纹外径(mm)2)铣长螺纹tj=d×π×L×g×i/(V周×P)(min)注:式中,L——螺纹长度(mm)g——螺纹头数(mm)p——螺纹升程(度)3)外螺纹旋风铣削tj=L×i/(nW×p)(min)4)内螺纹旋风铣削tj=L×i/(nW×p)(min)注:上两式式中L——被加工螺纹长度(mm)i——走刀次数nW=fZ×n/(d×π)——工件转数P——螺纹升程(mm)fZ——每齿(刀头)的圆周进给量(mm/z)n——铣刀转数(r/min)d——螺纹外(mm)6、用板牙或丝锥加工螺纹tj=[(1+11+12)/p×n+(1+11+12)/p×n1]×i=2×(1+2p)×i/(p×n)(mm) 式中,tj——机动时间(mm)1——加工长度(mm)11——切入长度(mm)12——切出长度(mm)p——螺距(mm)n——刀具或工件转数(r/min)n1——刀具或工件返回转数(r/min)7、拉削t1——H/(1000×VC)(min)式中,H——机床调整的冲程长度(mm)8、磨削所用符号tj——机动时间(min)h——每面加工余量(mm)B——磨轮宽度(mm)f纵——纵向进给量(mm/r)ft——磨削深度进给量(mm)n——工件每分钟转数(r/min)A——切入次数K——光整消除火花修正系数=1.3τ——光整时间(min)L——工件磨削长度(mm)11——工件磨削表面长度(mm)b——工件磨面宽度(mm)VW——工作台往复速度(m/min)fB——磨削宽度进给量(mm)Z——同时加工工件数①外、内圆磨削1)纵向进给磨削tj=2×L×h×K/(n×f纵×ft)(min)2)切入法磨削tj=[h×A/ft+τ]×K=(0.25×A/0.005+0.15)×1.3(min)②平面磨削1)周磨tj=2×L×b×h×K/(1000×VW×FB×ft×Z)(min)注:L=11+20(mm)fB=平均15(mm)ft=0.003-0.085(mm)VW=5-20(m/min)2)端磨tj=h×i/(f双×n双)(min)注:f双——双行程轴向进给量(mm)n双——每分钟双行程数(双程/min)3)无心磨tj=L×i/(0.95×Vf)(min)式中,Vf——轴向进给速度(mm/min)L=1+B(单件)L=n工×1+B(多件连续进给)(mm)1——工件长度(mm)nZ——连续磨削工件数。
棒材轧制先进设备-KOCKS减定径轧机
辊环
20
带偏心套筒的输入传动轴
法兰 拉杆 拉杆螺母
轴向调整 装置 Step 2: 拔出拉杆 Step 3: 松开拉杆螺母 辊环
21
带偏心套筒的输入传动轴
法兰 拉杆 拉杆螺母
轴向调整 装置 Step 4: 将拉杆向里推,使法兰分离(辊环是通 过专用夹具固定在两个法兰之间的) 辊环
22
带偏心套筒的输入传动轴
14
KOCKS 轧机特性
15
KOCKS 轧机特性
机械设计特点 机架可调整,且带3根输入轴 ”C-模块” 传动系统 轧辊的快速更换系统 (轧辊间) 机架的快速更换系统
工艺特点 在一套机组里减径与定径相结合的孔型设计 (RSB) 粗轧和中轧的单一孔型轧制 “自由定径”的孔型设计 轧辊和导卫的远程控制 (在线) 机架和导卫和计算机辅助调整系统 (轧辊间)
0,15
0,15
0,10
0,10
0,05
0,05
0,00 10
47
0,00 15 20 25 30 35 40 45 50 55 60 Finished Bar Dimension [mm] 65 70 75 80
Tolerance [± mm]
轧辊和导卫的远程控制
导卫的调整
轧辊和导卫的遥控调整是在主控台上进行的。进行维护时,也可在机旁控
( mm )
( mm ) ( mm ) ( mm ) ( mm ) ( m/s ) ( mm ) ( mm ) ( N° )
380
370 70/40 最大10 mm ± 0.5 mm 25 /18 Ø 75 / Ø 55 Ø 14 / Ø 16 1
2
3辊轧制技术 可以确保:
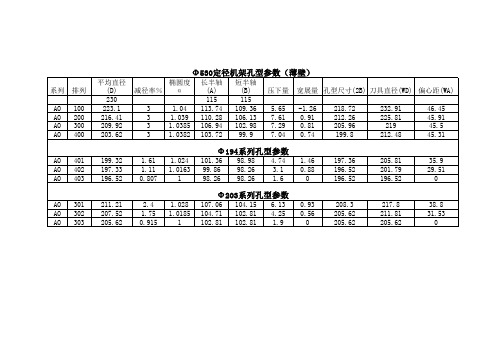
Φ530定径机架孔型参数表
Φ 273孔型参数
1.0142 1
Φ 530定径机架Ф 273孔型参数(厚壁)
排列 平均直径(D) 减径率% 椭圆度α 长半轴(A) 短半轴(B) 压下量 310 155 155 100 304.73 1.7 1.0151 153.51 151.22 3.78 200 298.64 2 1.0149 150.42 148.2 5.3 300 292.66 2 1.0148 147.4 145.26 5.16 400 286.81 2 1.0147 144.45 142.36 5.05 401 283.05 1.31 1.0096 142.2 140.85 3.6 402 280.19 1.01 1.0163 141.23 138.96 3.24 403 277.92 0.81 1 138.96 138.96 2.27 宽展量 孔型尺寸(2B) 刀具直径(WD) 偏心距(WA) -1.49 -0.8 -0.8 -0.81 -0.16 0.38 0 302.44 296.4 290.5 284.72 281.7 277.92 277.92 309 302.82 296.76 290.86 285.67 284.65 277.92 27.13 27.19 27.21 27.26 22.13 28.93 0
Ф 194系列孔型参数
AR AR AR 401 402 403 200.89 198.88 197.48 1.34 1 0.702 1.0051 1.0141 1 100.7 100.14 98.74 100.19 98.74 98.74 2.55 1.96 1.4 -0.18 -0.05 0 200.38 197.48 197.48 202.04 202.08 197.48 16.52 27.55 0
钻井各种计算公式

钻井各种计算公式钻头水利参数计算公式:827 21、 钻头压降: P b Q( MPa )24c de2、 冲击力: Fj 1.02 QV(N) 3、 喷射速度: V 0 1273Q(m/s)2d e809.0534、 钻头水功率:N b Q(KW )24c de5、1273 N b(W/mm 2)比水功率: N 比=2D井6、 上返速度: V 返 =1273Q( m/s )22D井D 杆式中:ρ-钻井液密度g/cm 3Q-排量 l/sc -流量系数,无因次,取 0.95~0.98d e -喷嘴当量直径 mmde222d n :每个喷嘴直径 mmd 1 d2dnD 井、D 杆 -井眼直径、钻杆直径 mm全角变化率计算公式:25222a b Kaba ba b sin2 Lab式中: ab -A 、B 两点井斜角; a b-A 、B 两点方位角套管强度校核:抗拉:安全系数 m =1.80(油层);1.60~1.80(技套)抗拉安全系数=套管最小抗拉强度 /下部套管重量 ≥1.80抗挤:安全系数: 1.125P挤H 泥' '/P挤≥1.12510查套管抗挤强度PcP c按双轴应力校核:10P ccnH式中:Pcc -拉力为 Tb时的抗拉强度( kg/cm 2) -钻井液密度( g/cm 3)H -计算点深度( m )其中:PccPc22KK3T bTbT b :套管轴向拉力(即悬挂套管重量) kgP c :无轴向拉力时套管抗挤强度kg/cm 2K :计算系数 kgK 2AsA :套管截面积 mm 2s:套管平均屈服极限 kg/mm 2不同套管 s如下:J 55 :45.7N80 :63.5P :87.9110地层压力监测:R nlg3.282NT (d c指数 )d c0.0671WRmlgD8.4895 105H 0. 0417d cn10d cnRm(压力系数)Rpd c式中: T –钻时 min/mN –钻盘转数 r/min W -钻压 KND -钻头直径 mmR n -地层水密度 g/cm 3R m -泥浆密度 g/cm 3压漏实验:1、 地层破裂压力梯度: G f1000PLKPa9.8 mH2、 最大允许泥浆密度:max102PLg/cm 3mH为安全,表层以下m 0.06g/cm3max技套以下m 0.12g/cm3max'gHmax3、 最大允许关井套压:PaPRm0.81000式中:P L-漏失压力( MPa ) P R-破裂压力( MPa )m'm ax-原泥浆密度( g/cm 3)H -实验井深( m )-设计最大泥浆密度( g/cm 3)9.8H9.8HP 漏=PLmP 破 PRm10001000井控有关计算:最大允许关井套压经验公式:表层套管 [Pa]=11.5% ×表层套管下深( m )/10MPa技术套管 [Pa]=18.5% ×技术套管下深( m ) /10MPa1000 P地层破裂压力梯度: GRKPa/mRH最大允许关井套压:PaG RH套0.00981maxH套0.8Mpa1000最大允许钻井液密度:'GR- 0.06 (表层 )max9.81'GR -0.12 (技套)max9.81套管在垂直作用下的伸长量 :L 7.854m 2 74L 10式中:-钻井液密度 g/cm 3L -自重下的伸长 mmL -套管原有长度 m套管压缩距 : LL自固钢总E 10LLm式中: L -下缩距 mL自-自由段套管长度 mL固-水泥封固段套管长度 m L总-套管总长 m钢-钢的密度 7.85g/cm3m-钻井液密度 g/cm3E -钢的弹性系数(2.1×106kg/cm 3)泥浆有关计算公式:1、加重剂用量计算公式: W加=r 加V原r重-r原r 加r重式中:W加-所需加重剂重量 吨V原-加重前的泥浆体积米 3r原 、 r 重 、 r加-加重前、加重后、加重材料比重g/cm 32、泥浆循环一周时间: TV 井V柱60Q式中: T -泥浆循环一周时间 分V 井、 V 柱 -井眼容积、钻柱体积升Q -泥浆泵排量升/秒3、井底温度计算公式: TT 0H168式中: T 、 T 0 -井底、井口循环温度oCH -井深米4、配制泥浆所需粘土和水量计算:粘土量W 土= r泥V 泥r 泥-r 水r 土r水水量Q水=V泥-W土r土式中: W 土 -所需粘土的重量吨V 泥 -所需泥浆量米3r 水、 r 土、r 泥 -水、土和泥浆的比重 g/cm3Q 水 -所需水量米35、降低比重所需加水量:Q水=V 原 r原r稀 r水r稀r水式中: Q 水-所需水量米 3V 原-原泥浆体积米 3r 原、 r 稀、r 水-原泥浆、稀释后泥浆和水的比重g/cm3。
机械设计课程设计公式
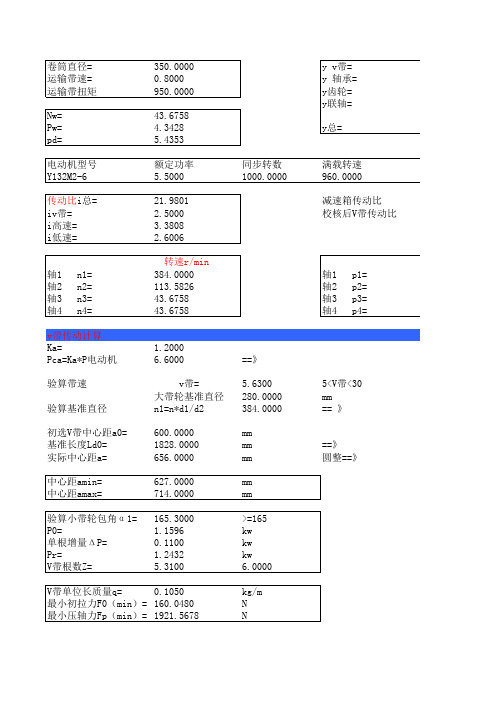
350.0000 0.8000 950.0000
Nw=
43.6758
Pw=
4.3428
pd=
5.4353
电动机型号 Y132M2-6
额定功率 5.5000
同步转数 1000.0000
传动比i总= iv带= i高速= i低速=
21.9801 2.5000 3.3808 2.6006
圆周速度v 齿宽b 齿高h 宽高比b/h
0.3107 52.2381 4.9361 10.5828
计算实际 载荷系数KF
Kv
1.0200
Kfα
1.4000
KHβ
1.5334
KFβ
1.4700
KF
2.0992
实际载荷系数算的齿
轮模数
mn
2.5738
模数
mn>= 2.5738
Z1=
16.8194
Z2=
59.8138
中心距 a=
128.8919
中心距修正螺旋角β= 0.2919
分度圆直径d1=
72.0482
分度圆直径d2=
187.9518
齿宽b=
72.0482
圆整中心距后的强度
校核
齿面接触疲劳强度校核Βιβλιοθήκη αt20.8093
αat1
30.3554
αat2
25.0619
εα
1.5889
εβ
2.2001
Zε
《==
接触疲劳强度σ Hlim1= 接触疲劳强度σ Hlim2=
圆整==》 圆整==》
αn= β= tanαt= tanβb=
0.3640 0.9659
机械设计要背的公式知识点
机械设计要背的公式知识点机械设计是机械工程学科的重要组成部分,是涉及机械工程设计、制造与应用方面的一门学科。
在进行机械设计时,掌握并熟练运用各种公式是至关重要的。
本文将简要介绍机械设计中需要背诵的一些公式知识点。
一、静力学公式知识点1. 牛顿第二定律F = ma其中,F表示作用在物体上的力,m表示物体的质量,a表示物体的加速度。
2. 重力公式F = mg其中,F表示物体所受的重力,m表示物体的质量,g表示重力加速度。
3. 应力与应变关系σ = Eε其中,σ表示应力,E表示弹性模量,ε表示应变。
4. 复合材料的应力计算公式σ = Qε其中,σ表示应力,Q表示材料的弹性性能指标,ε表示应变。
5. 轴的刚度计算公式k = (π/64)Gd^4/L其中,k表示刚度,G表示剪切模量,d表示轴的直径,L表示轴的长度。
6. 齿轮传动的传动比计算公式i = (N2/N1) = (ω1/ω2) = (d1/d2)其中,i表示传动比,N表示齿轮的齿数,ω表示齿轮的角速度,d表示齿轮的直径。
二、动力学公式知识点1. 线速度公式v = ωr其中,v表示线速度,ω表示角速度,r表示半径。
2. 动量定理FΔt = Δmv其中,F表示作用在物体上的力,Δt表示作用时间,Δm表示物体的质量变化,v表示物体的速度。
3. 力矩公式M = Fd其中,M表示力矩,F表示作用力,d表示力臂长度。
4. 动能定理ΔE = W其中,ΔE表示动能的变化量,W表示作用在物体上的功。
5. 齿轮传动的转矩计算公式T1/T2 = d1/d2其中,T表示转矩,d表示齿轮的直径。
6. 转动惯量公式I = m*r^2其中,I表示转动惯量,m表示物体的质量,r表示旋转轴到物体质心的距离。
三、流体力学公式知识点1. 压力公式P = F/A其中,P表示压力,F表示作用力,A表示受力面积。
2. 流体的连续性方程A1v1 = A2v2其中,A表示流体通道横截面积,v表示流体的速度。
机械设计常用计算公式集(一)
机械设计常用计算公式集(一)运动学篇一、直线运动:基本公式:(距离、速度、加速度和时间之间的关系)1)路程=初速度x时间+加速度x时间^2/22)平均速度=路程/时间;3)末速度-初速度=2x加速度x路程;4)加速度=(末速度-初速度)/时间5)中间时刻速度=(初速度+末速度)/26)力与运动之间的联系:牛顿第二定律:F=ma,[合外力(N)=物体质量(kg)x加速度(m/s^2)] (注:重力加速度g=9.8m/s^2或g=9.8N/kg)二、旋转运动:(旋转运动与直线运动类似,注:弧度是没有单位的)单位对比:圆的弧长计算公式:弧长s=rθ=圆弧的半径x圆弧角度(角位移)周长=C=2πr=πd,即:圆的周长=2x3.14x圆弧的半径=3.14x圆弧的直径旋转运动中角位移、弧度(rad)和公转(r)之间的关系。
1)1r(公转)=2π(弧度)=360°(角位移)2)1rad=360°/(2π)=57.3°3)1°=2π/360°=0.01745rad4)1rad=0.16r5)1°=0.003r6)1r/min=1x2x3.14=6.28rad/min7)1r/min=1x360°=360°/min三、旋转运动与直线运动的联系:1)弧长计算公式(s=rθ):弧长=圆弧的半径x圆心角(圆弧角度或角位移)2)角速度(角速度是角度(角位移)的时间变化率)(ω=θ/t):角速度=圆弧角度/时间注:结合上式可推倒出角速度与圆周速度(即:s/t也称切线速度)之间的关系。
S3)圆周速度=角速度x半径,(即:v=ωr)注:角度度ω的单位一般为rad/s,实际应用中,旋转速度的单位大多表示为r/min (每分钟多少转)。
可通过下式换算:1rad/s=1x60/(2x3.14)r/min例如:电机的转速为100rad/s的速度运行,我们将角速度ω=100rad/s换算成r/min 单位,则为:ω=100rad/s=100x60/(2π)=955r/min4)rad/s和r/min的联系公式:转速n(r/min)= ω(rad/s)x60/(2π),即:转速(r/min)=角速度(rad/s)x60/(2π);5)角速度ω与转速n之间的关系(使用时须注意单位统一):ω=2πn,(即:带单位时为角速度(rad/s)=2x3.14x转速(r/min)/60)6)直线(切线)速度、转速和2πr(圆的周长)之间的关系(使用时需注意单位):圆周速度v=2πrn=(πd)n注:线速度=圆周速度=切线速度四、转矩计算公式:(1)普通转矩:T=Fr即:普通转矩(N*m)=力(N)x半径(m);(2)加速转矩:T=Jα即:加速转矩(N*m)=角加速度α(rad/s^2)x转动惯量J (kg*m^2)单位换算:转动惯量J(kg*cm^2):1kg*cm^2=10^-6kg*m^2;角加速度α(rad/s^2):1r/s^2=1x2xπrad/s^2;单位转换过程推导:(注:kgf*m(千克力*米),1kgf*m=9.8N*m,g=9.8N/kg=9.8m/s^2)假设转动惯量J =10kg*m^2,角加速度α=10rad/s^2,推导出转矩T的单位过程如下:T=J x α=10x(kg*m^2)x10(rad/s^2)=100(kgf*m/s^2)=()()()=100N*m两个简化单位换算公式:(注:单位换算其物理含义也不同,下式仅用于单位换算过程中应用。
机械设计基础公式汇总

机械设计基础公式汇总机械设计基础公式大家了解吗?以下是XX为大家整理好的机械设计基础公式汇总,一起来学习吧.零件:独立的制造单元构件:独立的运动单元体机构:用来传递运动和力的、有一个构件为机架的、用构件间能够相对运动的连接方式组成的构件系统机器:是执行机械运动的装置,用来变换或传递能量、物料、信息机械:机器和机构的总称机构运动简图:用简单的线条和符号来代表构件和运动副,并按一定比例确定各运动副的相对位置,这种表示机构中各构件间相对运动关系的简单图形称为机构运动简图运动副:由两个构件直接接触而组成的可动的连接运动副元素:把两构件上能够参加接触而构成的运动副表面运动副的自由度和约束数的关系f=6-s运动链:构件通过运动副的连接而构成的可相对运动系统高副:两构件通过点线接触而构成的运动副低副:两构件通过面接触而构成的运动副平面运动副的最大约束数为2,最小约束数为1;引入一个约束的运动副为高副,引入两个约束的运动副为平面低副平面自由度计算公式:F=3n-2PL-PH机构可动的条件:机构的自由度大于零机构具有确定运动的条件:机构的原动件的数目应等于机构的自由度数目虚约束:对机构不起限制作用的约束局部自由度:与输出机构运动无关的自由度复合铰链:两个以上构件同时在一处用转动副相连接速度瞬心:互作平面相对运动的两构件上瞬时速度相等的重合点。
若绝对速度为零,则该瞬心称为绝对瞬心相对速度瞬心与绝对速度瞬心的相同点:互作平面相对运动的两构件上瞬时相对速度为零的点;不同点:后者绝对速度为零,前者不是三心定理:三个彼此作平面运动的构件的三个瞬心必位于同一直线上机构的瞬心数:N=K(K-1)/2机械自锁:有些机械中,有些机械按其结构情况分析是可以运动的,但由于摩擦的存在却会出现无论如何增大驱动力也无法使其运动曲柄:作整周定轴回转的构件;连杆:作平面运动的构件;摇杆:作定轴摆动的构件;连架杆:与机架相联的构件;周转副:能作360?相对回转的运动副摆转副:只能作有限角度摆动的运动副。
机械设计基础公式

机械设计基础公式机械设计基础公式汇总机械设计基础公式大家了解吗?以下是小编为大家整理好的机械设计基础公式汇总,一起来学习吧.零件:独立的制造单元构件:独立的运动单元体机构:用来传递运动和力的、有一个构件为机架的、用构件间能够相对运动的连接方式组成的构件系统机器:是执行机械运动的装置,用来变换或传递能量、物料、信息机械:机器和机构的总称机构运动简图:用简单的线条和符号来代表构件和运动副,并按一定比例确定各运动副的相对位置,这种表示机构中各构件间相对运动关系的简单图形称为机构运动简图运动副:由两个构件直接接触而组成的可动的连接运动副元素:把两构件上能够参加接触而构成的运动副表面运动副的自由度和约束数的关系f=6-s运动链:构件通过运动副的连接而构成的可相对运动系统高副:两构件通过点线接触而构成的运动副低副:两构件通过面接触而构成的运动副平面运动副的最大约束数为2,最小约束数为1;引入一个约束的运动副为高副,引入两个约束的运动副为平面低副平面自由度计算公式:F=3n-2PL-PH机构可动的条件:机构的自由度大于零机构具有确定运动的条件:机构的原动件的数目应等于机构的自由度数目虚约束:对机构不起限制作用的约束局部自由度:与输出机构运动无关的自由度复合铰链:两个以上构件同时在一处用转动副相连接速度瞬心:互作平面相对运动的两构件上瞬时速度相等的重合点。
若绝对速度为零,则该瞬心称为绝对瞬心相对速度瞬心与绝对速度瞬心的相同点:互作平面相对运动的两构件上瞬时相对速度为零的点;不同点:后者绝对速度为零,前者不是三心定理:三个彼此作平面运动的构件的三个瞬心必位于同一直线上机构的瞬心数:N=K(K-1)/2机械自锁:有些机械中,有些机械按其结构情况分析是可以运动的,但由于摩擦的存在却会出现无论如何增大驱动力也无法使其运动曲柄:作整周定轴回转的构件;连杆:作平面运动的构件;摇杆:作定轴摆动的构件;连架杆:与机架相联的构件;周转副:能作360?相对回转的运动副摆转副:只能作有限角度摆动的运动副。
大直径5机架三辊定径机孔型的设计与开发

技术交流57大直径5机架三辊定径机孔型的设计与开发魏广(扬州诚德钢管有限公司,江苏扬州225200 )摘要:为了在大直径5机架定径机上实现共用一套孔型轧制30~100 m m壁厚大直径钢管的目的,提出了采用递减分配法进行定径机孔型设计的理念。
介绍了减径率设计思路,钢管热膨胀系数测算方法,总减径率递减分配模式以及宽展的选择及孔型的设计等,采用递减分配法设计的定减径孔型方案合理,能够满足30~100 m m壁厚组距薄、厚壁管一套孔型生产的要求。
关键词:三辊定径机;孔型设计;大直径;宽壁厚组距;递减分配法中图分类号:TG333.8 文献标志码:B文章编号:1001-2311(2020)06-0057-04Design and Development of Pass of Large-sized 5-stand,3-roll Sizing MillWEI Guang(Yangzhou Chengde Steel Pipe Co., Ltd., Yangzhou 225200, China)Abstract:The idea that adopts decreasing distribution method to design the sizing mill passes is proposed in orderto use one common set of passes to roll the 30~ 100 mm heavy wall, large-sized steel tubes with the large-sized 5-stand sizing mill. Elaborated here in the article are the main aspects of the pass design, involving the design approach with the reduction rate, the computing method for the steel pipe thermal expansion coefficient, the general reduction rate decreasing distribution mode,and broad siding determination as well as the pass design. The scheme of the sizing/reducing passes as designed with the decreasing distribution method is reasonable, being satisfactory to the requirements for manufacturing the 30〜100 mm light-wall and heavy-wall pipes with one common set of passes.Key words:3-roll sizing mill;pass design; large-sized; wide wall thickness range; decreasing distribution method钢管定径机是热轧无缝钢管变形的重要成型工 序设备,定径机孔型的参数决定了成品钢管的尺寸 精度[1-5]。
机械设计基础公式汇总

机械设计基础公式汇总机械设计基础公式大家了解吗?以下是XX为大家整理好的机械设计基础公式汇总,一起来学习吧.零件:独立的制造单元构件:独立的运动单元体机构:用来传递运动和力的、有一个构件为机架的、用构件间能够相对运动的连接方式组成的构件系统机器:是执行机械运动的装置,用来变换或传递能量、物料、信息机械:机器和机构的总称机构运动简图:用简单的线条和符号来代表构件和运动副,并按一定比例确定各运动副的相对位置,这种表示机构中各构件间相对运动关系的简单图形称为机构运动简图运动副:由两个构件直接接触而组成的可动的连接运动副元素:把两构件上能够参加接触而构成的运动副表面运动副的自由度和约束数的关系f=6-s运动链:构件通过运动副的连接而构成的可相对运动系统高副:两构件通过点线接触而构成的运动副低副:两构件通过面接触而构成的运动副平面运动副的最大约束数为2,最小约束数为1;引入一个约束的运动副为高副,引入两个约束的运动副为平面低副平面自由度计算公式:F=3n-2PL-PH机构可动的条件:机构的自由度大于零机构具有确定运动的条件:机构的原动件的数目应等于机构的自由度数目虚约束:对机构不起限制作用的约束局部自由度:与输出机构运动无关的自由度复合铰链:两个以上构件同时在一处用转动副相连接速度瞬心:互作平面相对运动的两构件上瞬时速度相等的重合点。
若绝对速度为零,则该瞬心称为绝对瞬心相对速度瞬心与绝对速度瞬心的相同点:互作平面相对运动的两构件上瞬时相对速度为零的点;不同点:后者绝对速度为零,前者不是三心定理:三个彼此作平面运动的构件的三个瞬心必位于同一直线上机构的瞬心数:N=K(K-1)/2机械自锁:有些机械中,有些机械按其结构情况分析是可以运动的,但由于摩擦的存在却会出现无论如何增大驱动力也无法使其运动曲柄:作整周定轴回转的构件;连杆:作平面运动的构件;摇杆:作定轴摆动的构件;连架杆:与机架相联的构件;周转副:能作360?相对回转的运动副摆转副:只能作有限角度摆动的运动副。
计算机辅助设计二辊定径机孔型
计算机辅助设计二辊定径机孔型肖永忠 罗 涛 黄大兵(610069 成都无缝钢管有限责任公司)摘 要 介绍了以计算机为辅助工具,用宽展量法设计二辊定径机椭圆孔型的基本步骤及计算机设计框图。
此方法比传统设计方法具有设计效率高、质量好等优点。
关键词 二辊定径机 孔型设计 计算机辅助设计CAD OF ROLL GROOVE OF TWO-H IGH SIZING MILLXiao Y o ng zho ng L uo T ao Huang Dabing(Chengdu Sea mless Steel T ube Co.,Lt d.)Abstract Intr oduced in the ar ticle a re the pr ocedur e o f desig ning ov al gr o ove o f the tw o-high sizing mill r oll by means o f the percentag e spread method and w it h computer as an aid too l and the CAD blo ck diag par ed w ith the co nv ent ional metho d,the said CA D metho d is mo re effec-tiv e and pro duces bet ter desig n quality.Key words T wo-hig h sizig mill G ro ov e desig n CAD前言二辊定径机具有结构简单、换辊快速的特点,并可实现外径调整的闭环控制,在钢管生产中它占有重要的地位。
成都无缝钢管有限责任公司1992年投入使用的12架微张力减径机,其孔型的设计长期采用宽展系数法,用此法设计需进行反复校核和计算,且对宽展系数的取值要求经验性强,没有一个设计标准参考函数,故无法利用计算机进行自动优化设计。
机械设计基础公式汇总
机械设计基础公式汇总机械设计基础公式汇总机械设计基础公式大家了解吗?以下是XX为大家整理好的机械设计基础公式汇总,一起来学习吧.零件:独立的制造单元构件:独立的运动单元体机构:用来传递运动和力的、有一个构件为机架的、用构件间能够相对运动的连接方式组成的构件系统机器:是执行机械运动的装置,用来变换或传递能量、物料、信息机械:机器和机构的总称机构运动简图:用简单的线条和符号来代表构件和运动副,并按一定比例确定各运动副的相对位置,这种表示机构中各构件间相对运动关系的简单图形称为机构运动简图运动副:由两个构件直接接触而组成的可动的连接运动副元素:把两构件上能够参加接触而构成的运动副表面运动副的自由度和约束数的关系f=6-s运动链:构件通过运动副的连接而构成的可相对运动系统高副:两构件通过点线接触而构成的运动副低副:两构件通过面接触而构成的运动副平面运动副的最大约束数为2,最小约束数为1;引入一个约束的运动副为高副,引入两个约束的运动副为平面低副平面自由度计算公式:F=3n-2PL-PH机构可动的条件:机构的自由度大于零机构具有确定运动的条件:机构的原动件的数目应等于机构的自由度数目虚约束:对机构不起限制作用的约束局部自由度:与输出机构运动无关的自由度复合铰链:两个以上构件同时在一处用转动副相连接速度瞬心:互作平面相对运动的两构件上瞬时速度相等的重合点。
若绝对速度为零,则该瞬心称为绝对瞬心相对速度瞬心与绝对速度瞬心的相同点:互作平面相对运动的两构件上瞬时相对速度为零的点;不同点:后者绝对速度为零,前者不是三心定理:三个彼此作平面运动的构件的三个瞬心必位于同一直线上机构的瞬心数:N=K(K-1)/2机械自锁:有些机械中,有些机械按其结构情况分析是可以运动的,但由于摩擦的存在却会出现无论如何增大驱动力也无法使其运动曲柄:作整周定轴回转的构件;连杆:作平面运动的构件;摇杆:作定轴摆动的构件;连架杆:与机架相联的构件;周转副:能作360?相对回转的运动副摆转副:只能作有限角度摆动的运动副。
《机械设计》公式
2 I・2ZL1- ------Lmaxi=i- zFO Mapmax^ — + — < \(yp\zFO Mapmin = —— - —> 0A W6bb是倾覆力矩方向松螺栓连接紧螺栓连接(1・3倍)1.3F0<7二---- < 167T 2 护1F2 = Fl + FCbFOlb= tan6b=cbFO-—=lanOm = Cm AmCb△F = -----------Cb + CmF2总拉力FO预紧力Fl残余预紧力(1、余谐音)F工作拉力预紧力+工作拉力图5 -25单个紧嫖栓连接受力变形线图ah3一albl3W =承受工作剪力的紧螺栓连接(挤压+剪切)挤压强度条件剪切强度条件FT= —<[T]带传动链传动符号I参数名称I公式1 I备注链速Z1•nl • P Z2-n2 • PV = 60 x 1000 = 60 X 1000平均传动比nl z2分度圆直径Pd= 180。
Sin(丁)链节数u0 zl + z2 z2-zl 2P标准直齿轮斜齿轮直齿锥齿轮传动是以大端参数为标准值的。
要想进行力的计算,就要知道dm 是根据d 来求的:dml = dl(l - °.5eR)b中R =—还要知道①R: RR的计算如卞J dl 2(12 2j/ 4- 1 m (~2 -------------------- ? R = J(y) +(R =心一— = —^zr + z2d是根据mz来求的:dl = m71m是人端模数,是标准值。
【机械设计】电机选型设计中常用公式与知识点汇总,机械工程师必收藏
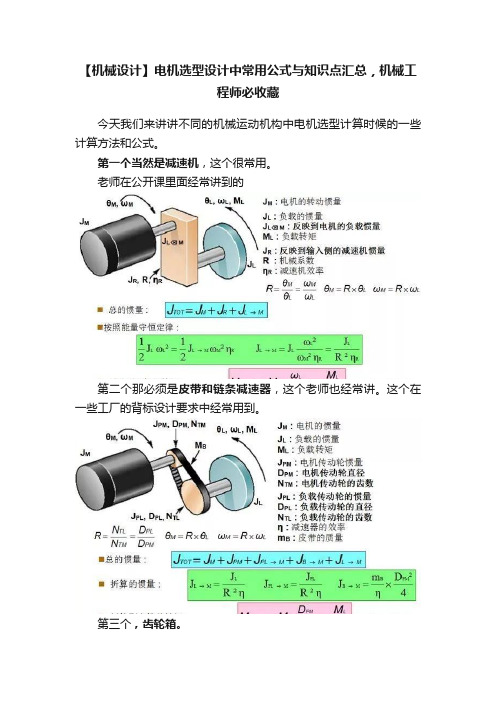
【机械设计】电机选型设计中常用公式与知识点汇总,机械工程师必收藏今天我们来讲讲不同的机械运动机构中电机选型计算时候的一些计算方法和公式。
第一个当然是减速机,这个很常用。
老师在公开课里面经常讲到的第二个那必须是皮带和链条减速器,这个老师也经常讲。
这个在一些工厂的背标设计要求中经常用到。
第三个,齿轮箱。
导螺杆折算到电机的转矩 :按照能量守恒定律:如果我们考虑到螺杆,负载,工作台的数据和效率:传送带:最后,齿轮齿条组合常见的机械的效率 :阿基米德螺杆(带铜衬套) : 0.35 - 0.65阿基米德螺杆(塑料衬套): 0.50-0.85滚珠丝杠 : 0.75- 0.85预加载滚珠丝杠: 0.85 - 0.95正齿轮 : ~ 0.75锥齿轮 : 0.90- 0.95蜗轮 : 0.45 -0.85链轮 : ~ 0.95, 0.98调速皮带 : ~ 0.96, 0.98轴承 : ~ 0.98摩擦摩擦的公共模型有三个组成部分 :1,滑动摩擦: 幅值大致不变.2,零速时的粘滞摩擦 (静摩擦).•从零速到滑行的摩擦过渡不明显.•仅仅在很低的速度下发生.•对系统有不稳定的影响, 会造成粘滑运动的现象.3,与速度成正比的粘滞阻尼.常见的滑动摩擦系数 :钢对钢 : ~ 0.58钢对钢 (涂脂) : ~ 0.15铝对钢 : ~ 0.45黄铜对钢 : ~ 0.35紫铜对钢 : ~ 0.58塑料对钢 : ~ 0.15, 0.25惯量系数低惯量 = 高加速度牛顿定律告诉我们, 对于一个旋转的系统 : M = J ω’ 这里 M : 转矩 (Nm)J : 惯量(Kg.m²)ω’ : 角加速度rd/s²ω’ = M / J (加速度 = 转矩 / 惯量)低惯量电机 :•允许高动态系统.•增加系统带宽.•但是增加了负载与电机的不匹配来源:爱咖邦。
械机计算公式
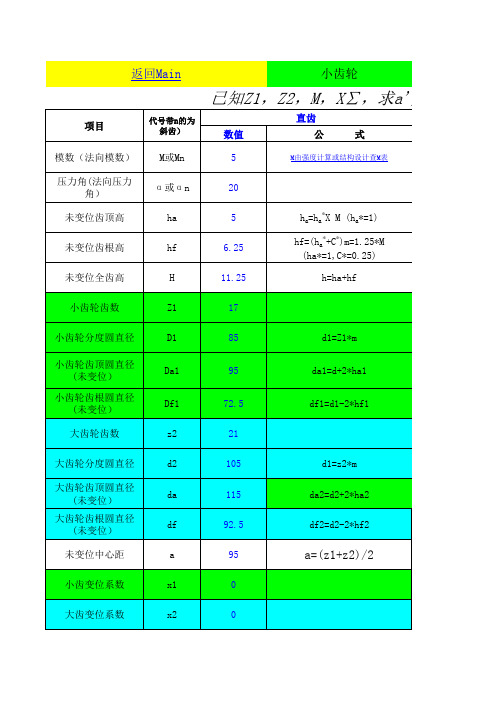
直齿 数值 5 20 5 6.25 11.25 17 85 95 72.5 21 105 115 92.5 95 0 0 d1=z2*m da2=d2+2*ha2 df2=d2-2*hf2 d1=Z1*m da1=d+2*ha1 df1=d1-2*hf1 ha=ha*X M (ha*=1) hf=(ha*+C*)m=1.25*M (ha*=1,C*=0.25) h=ha+hf 公 式
已知Z1,Z2,M,a',求X∑,Δ y
大齿轮
,求a',Δ y
斜齿(人字齿) 数值 3.5 20 3.5 4.375 7.875 51 184.796798 191.796798 176.046798 40 d1=z*Mt d1=Z1*Mt da1=d+2*ha df1=d-2*hf 公 式 备 注 15
X∑
0 0.014904384
inva' y a' △y da1
0.014904384 0 95 0 95
查35-41表35.2-19
由图35.2-4查得
da2
115
侧隙检验尺寸
小齿分度圆弦齿厚 大齿分度圆弦齿厚 小齿轮公法线跨齿数 小齿轮公法线长度 大齿轮公法线跨齿数 大齿轮公法线长度 S1或Sn1 S2或Sn2 k1 Wk1或Wkn1 k2 Wk2或Wkn2 7.842810554 7.846659827 2 23.3225 3 38.3575 s=z1*m*sin90/z s=z2*m*sin90/z k1=(a/180)*z1+0.5 Wk1=mcosa(PI(k-0.5)+z1inva) 当a=20时,Wk=m*(2.951*(k0.5)+0.014z1) k2=(a/180)*z2+0.5 Wk2=mcosa(PI(k-0.5)+z2inva) 当a=20时,Wk=m*(2.951*(k0.5)+0.014z2)
工程硕士:棒材三辊连续减定径机组力能参数计算及工艺参数设计的研究

工程硕士:棒材三辊连续减定径机组力能参数计算及工艺参数设计的研究第1 章绪论1.1 引言钢材是国民经济发展中最重要的、消耗量最大的金属材料,涉及到制造业、农业、交通、建筑、国防等各个领域[1]。
其中棒线材的年产量也已经超过世界棒线材年总产量的三分之一[2],因此不管是在国内还是在国际上棒线材都处于非常重要的地位。
随着市场竞争的日益激烈,对棒线材轧机的要求越来越高。
现在棒线材轧机的市场趋势是,除了能够满足技术和质量相关的目标之外,还要求其能够对不断变化的市场需求做出迅速反应。
这主要体现在开发周期、生产效率和节能环保等方面[3]。
棒线材对产品质量的要求体现在尺寸精度、表面质量、内部组织结构性能等方面。
目前,虽然我国棒线材轧机数量、年生产能力和棒线材占总钢材生产量的百分比都居于世界第一,但是投产的属于世界先进水平的生产线很少,大部分棒线材生产线还是属于一般甚至落后的设备生产线。
这些生产线生产效率低,产品精度差、生产能耗高,而且对于一些特殊的棒线材,生产过程对国外技术十分依赖。
国外技术的保密性和我国设备的落后性极大的阻碍了棒线材生产向前前进的步伐。
因此要开发国内的高端棒线材市场,先研究国外先进的棒线材生产技术,再自主研发设计是促进行业发展的一条捷径。
棒线材生产线是否先进的重要标志是,是否安装能实现精密轧制的减定径机组。
今天在棒线材减定径机组方面处于领先地位的是KOCKS 公司的三辊减定径机组。
但其三辊减定径技术(RSB)是专利技术,整个设备到工艺都是保密的,这使我们的学习非常困难。
但是国内也有一些钢厂引进了其生产线,可以为我们的研究提供一些有价值的参考资料。
.......1.2 三辊棒线材减定径机组概述我国的棒线材生产长时间以来都是采用传统的二辊轧机。
二辊轧机结构简单、操作容易、投资少,至今仍被我国很多棒线材生产厂家采用。
所以用二辊轧机进行棒线材轧制已经具有丰富的经验,不管是在设备生产设计、孔型设计还是轧制规程设计上都具有非常成熟的模型。
机械设计基础公式汇总
机械设计基础公式汇总机械设计基础公式大家了解吗?以下是XX为大家整理好的机械设计基础公式汇总,一起来学习吧.零件:独立的制造单元构件:独立的运动单元体机构:用来传递运动和力的、有一个构件为机架的、用构件间能够相对运动的连接方式组成的构件系统机器:是执行机械运动的装置,用来变换或传递能量、物料、信息机械:机器和机构的总称机构运动简图:用简单的线条和符号来代表构件和运动副,并按一定比例确定各运动副的相对位置,这种表示机构中各构件间相对运动关系的简单图形称为机构运动简图运动副:由两个构件直接接触而组成的可动的连接运动副元素:把两构件上能够参加接触而构成的运动副表面运动副的自由度和约束数的关系f=6-s运动链:构件通过运动副的连接而构成的可相对运动系统高副:两构件通过点线接触而构成的运动副低副:两构件通过面接触而构成的运动副平面运动副的最大约束数为2,最小约束数为1;引入一个约束的运动副为高副,引入两个约束的运动副为平面低副平面自由度计算公式:F=3n-2PL-PH机构可动的条件:机构的自由度大于零机构具有确定运动的条件:机构的原动件的数目应等于机构的自由度数目虚约束:对机构不起限制作用的约束局部自由度:与输出机构运动无关的自由度复合铰链:两个以上构件同时在一处用转动副相连接速度瞬心:互作平面相对运动的两构件上瞬时速度相等的重合点。
若绝对速度为零,则该瞬心称为绝对瞬心相对速度瞬心与绝对速度瞬心的相同点:互作平面相对运动的两构件上瞬时相对速度为零的点;不同点:后者绝对速度为零,前者不是三心定理:三个彼此作平面运动的构件的三个瞬心必位于同一直线上机构的瞬心数:N=K(K-1)/2机械自锁:有些机械中,有些机械按其结构情况分析是可以运动的,但由于摩擦的存在却会出现无论如何增大驱动力也无法使其运动曲柄:作整周定轴回转的构件;连杆:作平面运动的构件;摇杆:作定轴摆动的构件;连架杆:与机架相联的构件;周转副:能作360?相对回转的运动副摆转副:只能作有限角度摆动的运动副。