2.5 连接和执行程序
ArduRover2.5使用手册

ArduRover2.5使用手册目录一、介绍 (1)二、性能特点 (2)三、硬件构成 (2)四、硬件安装 (4)五、Windows地面站安装 (4)六、连接地面站 (7)七、罗盘校准 (8)八、航线规划 (11)九、自动模式下速度设置 (15)十、驾驶模式配置 (16)十一、命令行的使用 (17)AutoRover2.5是一款功能强大而且完全开源的自动驾驶小车,同时还可以搭配多款地面控制站使用。
地面站中可以在线升级固件、调参,使用一套全双工的无线数据传输系统在地面站与小车之间建立起一条数据链,即可组成一套无人车自动控制系统。
二、性能特点●人性化的图形地面站控制软件,通过一根Micro_USB线或者一套无线数传连接,鼠标点击操作就可以进行设置和下载程序到控制板的MCU 中,无需编程知识和下载线等其它硬件设备。
但如果你想更深入的了解AutoRover2.5的代码的话,你仍旧可以使用Arduino来手动编程下载;●地面站的任务规划器支持上百个航点的自主驾驶设置,并且只需要通过鼠标在地图上点击操作就行;●基于强大的MAVLink协议,支持双向遥测和实时传输命令;●地面站中可实现任务规划,实时参数调整,视频显示,语音合成和查看飞行记录等;三、硬件构成●核心MCU采用ATMEL的8bit ATMEGA2560●整合三轴陀螺仪与三轴加速度的六轴MEMS传感器MPU6000●高度测量采用高精度数字空气压力传感器MS-5611●板载16MB的AT45DB161D存储器●三轴磁力计HMC5883●8路PWM控制输入●11路模拟传感器输入●11路PWM输出(8路电调电机+3路云台增稳)●GPS模块支持ublox输出的NEO-7M、8M等●可通过I2C接口使用外置罗盘四、硬件安装安装中需要注意以下几点:1、控制板为5V供电,最高不要超过 5.5V。
推荐你使用单独的UBEC进行供电;2、通过USB接口供电时,如果USB数据处于连接状态,控制板会切断无线数传接口的通讯功能,所以请不要同时使用无线数传和USB线连接调试小车,USB接口的优先级高于无线数传接口,仅有供电功能的USB线不在此限。
校园网入侵操作步骤

校园网入侵操作步骤校园网入侵操作步骤一、条件准备下载三个黑客软件:NTscan变态扫描器、Recton v2.5、DameWare迷你中文版4.5。
NTscan变态扫描器可以对指定IP地址段的所有主机进行扫描,扫描方式有IPC扫描、SMB扫描、WMI扫描三种,可以扫描打开某个指定端口的主机,通过扫描可以得到其中弱口令主机的管理员用户名和密码。
Recton v2.5是一个典型的黑客攻击软件,只要拥有某一个远程主机的管理员账号和密码,并且远程主机的135端口和WMI 服务(默认启动)都开启,就可以利用该软件完成远程开关telnet,远程运行CMD命令,远程重启和查杀进程,远程查看、启动和停止服务、查看和创建共享、种植木马、远程清除所有日志等操作。
DameWare迷你中文版4.5是一款远程控制软件,只要拥有一个远程主机的账号和密码,就可以对该主机实施远程监控,监视远程主机的所有操作甚至达到控制远程主机的目的。
另外选择两台操作系统为Windows XP Professional的主机,其中一台作为实施攻击的主机(以下称“主机A”),另一台作为被攻击的主机(以下称“主机B”),并将两台主机接入局域网中。
二、模拟攻击前的准备由于本次模拟攻击所用到的黑客软件均可被较新的杀毒软件和防火墙检测出并自动进行隔离或删除的处理,因此,在模拟攻击前要先将两台主机安装的杀毒软件和防火墙全部关闭。
然后打开“控制面板”中的“windows安全中心”,执行“windows防火墙”设置,将“windows防火墙”也关闭,如图所示。
由于在默认的情况下,两台主机的IPC$共享、默认共享、135端口和WMI服务均处于开启状态,因此对共享、端口和服务不做任何调整。
设置主机A的IP地址为“172.16.100.1”,主机B的IP地址为“172.16.100.2”(IP地址可以根据实际情况自行设定),两台主机的子网掩码均应为“255.255.0.0”。
pdms常用命令

PDMS工具集功能:生成逻辑吊点命令:|show !!creathanger|功能:add |Assembly...| 命令:|show !!Assembly|功能:add |Creat Split Tee...| (创建分割三通)命令: |show !!createe|功能:add |* Model check...| (管道查询工具)命令:|show !!pipedim|功能:add |* Generate MTO | (管道材料报表)命令:|show !!gpmto|功能:add |* Sort Pipe...| (管道排序)命令:|show !!pipeorder|功能:add |* Segment Slope...|(管道坡度设计)命令:|show !!segslope|功能:add |* 3D letter...|(增加3D字体[不支持中文])命令:|show !!letter3d|功能;add |Auto Elbow |(弯头自动连接)命令:|$m /%PMLLIB%\TOOLKIT\AUTOELBOW.MAC|功能:add |Copy&Rename...|(拷贝重命名)命令:|show !!copyrename|功能:add |Batch copy...| 命令:|show !!batchcopy|功能:add |Insulation Summary...|(生成保温报表)命令:|show !!piperep|功能:add |InterDB macro...| 命令:|kill !!interdbmac show !!interdbmac|功能: add |Add volumn...| 命令: |show !!MWaddvolumn| 功能: add |* Funnel...| (创建漏斗)命令:|show !!funnel|功能:add |* Creat Fitting...| (逻辑埋件设置及定位)命令:|show !!strufitting| 功能:add |* Named section...| (自动命名梁构件)命令:|show !!autonamesctn| 功能:add |Hanger Design...| (PUCG支吊架接口程序)命令: |show !!zdjjk|功能:add |PKPM interface...|(PDMS数据接口)命令: |$m %pdmsexe%\sxpitf| 功能:add |Glif interface...| 命令:|show !!pdms2glifr|功能:add |YMJ Selection...| (预埋件)命令:|show !!YmjAuto|功能:add |Creat Hole...|(隔栅板)命令:|show !!creathole|功能: add |Add Insulation...|(添加保温)命令:|show !!addinsu|功能: add |* Get Ipara...| 命令:|show !!getipara|功能:add |* Change Specification...| (转换管道等级)命令:|show !!chspec|功能:add |* Creat drawing number...| (创建ISO图档案号)命令: |show !!isonumber| 功能:add |Name to duty| 命令:|$m /%PMLLIB%\TOOLKIT\pipename2duty.MAC|功能:add |Name to key attribute| 命令:|$m /%PMLLIB%\TOOLKIT\lsno.MAC|功能:add |* Report spec break| 命令:|$m /%PMLLIB%\TOOLKIT\reportspec.MAC|功能:add |* Show spec break| (显示管道等级)命令:|$m /%PMLLIB%\TOOLKIT\specbreak.MAC| 功能:add |* Attachment check...| 命令:|show !!attacheck|功能:add |Reselect tube...|(查询管道材质及规格)命令|!!selectube()|功能:add |Branch Flip | 命令:|$m /%PMLLIB%\TOOLKIT\HT_exch.MAC|功能:add |Branch Merge| (管道结合)命令:|$m /%PMLLIB%\TOOLKIT\mergebranch.MAC| 功能:add |Branch Split|(管道分割)命令:|$m /%PMLLIB%\TOOLKIT\splitbranch.MAC|功能:add |flip Cable tray | 命令:|$m /%PMLLIB%\TOOLKIT\flipCabletray.MAC|功能:add |* Ftube fill branch...| 命令:|show !!ftubefill|功能:add |* 斜管连接| 命令:|$m /%PMLLIB%\TOOLKIT\superlink.mac|功能:add |* Connect next...| 命令:|show !!connectnext|功能:add |Reconnect Set-on tee| 命令:|$m /%PMLLIB%\TOOLKIT\teerelink.mac|功能:add |* Creat Gridline Column...| 命令:|show !!creatgridline|功能:add |* Set Gridline reference| 命令:|SHOW !!SETREFERENCE|功能:add |* Mtoc off| 命令:|$m /%PMLLIB%\TOOLKIT\instmtocoff.mac|功能:add |Old Equip template...|(创建标准设备)命令:|show _CDSTDEQUI|功能:add |Instrument Box| 命令: |$m /%PMLLIB%\TOOLKIT\instrumentbox.mac|功能:add |Modify Extrusion...| (修改拉伸体)命令:|SHOW !!CDPANEL|功能:add |Modify Revolution...| (修改旋转体)命令:|show !!dbeloopedit|功能:add |* Creat Nozzle...|(创建管嘴)命令:|$m /%PMLLIB%\TOOLKIT\nozzle.mac NEW|功能:add |Modify Nozzle...| (改管嘴)命令: |$m /%PMLLIB%\TOOLKIT\nozzle.mac OLD|功能:add |Nozzle Specification...| (管嘴等级及修改)命令: |CALLE XNOZZSPEC|功能:add |* Calculate Nozzle...| 命令:|show !!nozzlength|功能:add |* Check Nozzle...|(管嘴检查)命令:|show !!checknozzle|功能:add |Pml Browser...|(PML语言浏览器)命令:|show !!pmlbrowser|功能:add |Find and Replace...|(查找替换)命令:|show !!findreplace|在Display—command line里直接输入命令—Enter,将出现命令对话框。
PPT讲义

第1章 程序设计基本概念 §1.1 程序和程序设计 §1.2 算法 §1.3 结构化程序设计和模块化结构 第2章 C程序设计的初步认识 §2.1 简单C语言程序的构成和格式 §2.2 标识符、常量和变量 §2.3 整型数据 §2.4 实型数据 §2.5 字符型数据
§2.6 算术表达式 §2.7 赋值表达式 §2.8 自增、自减运算符和逗号运算符 §2.9 关系运算符、逻辑运算符及条件运算符 §2.10 位运算 第3章 顺序结构 §3.1 基本语句 §3.2 数据输出 §3.3 数据输入 顺序结构程序设计示例
C语言的主要特点
(1) 简洁紧凑、灵活方便 共有32个关键字,9种控制语句,程序书写自 由,主要用小写字母表示。 (2) 运算符丰富 运算符包含的范围很广泛,共有34种运算符。 C语言把括号、赋值、强制类型转换等都作为 运算符处理。 (3) 数据结构丰富 整型、实型、字符型、数组类型、指针类型、 结构体 类型、共用体类型等,能用来实现各种 复杂的数据类型的运算。
第9章 指针 §9.1 地址和指针的概念 §9.2 指针变量 §9.3 数组与指针 §9.4 字符串与指针 §9.5 指针数组与指向指针的指针 §9.6 指针与函数 第10章 结构体、共用体 §10.1 结构体类型与结构体变量
§10.2 结构体数组与结构指针 §10.3 用指针处理链表 §10.4 共用体 §10.5 枚举类型 §10.6 用typedef定义类型 第11章 文件 §11.1 文件概述 §11.2 文件的打开与关闭 §11.3 文件的读写 §11.4 文件的定位
3. 特点:有穷性、确定性、可行性(有效性)、 有零个或多个输入、有一个或多个输出。 4. 表示方法 (1) 流程图: 开始或终止框、 输入输出框、 判断框、 处理框、 流程线、 连接点、 注释框。 (2) 伪代码 (3) 计算机语言-C语言
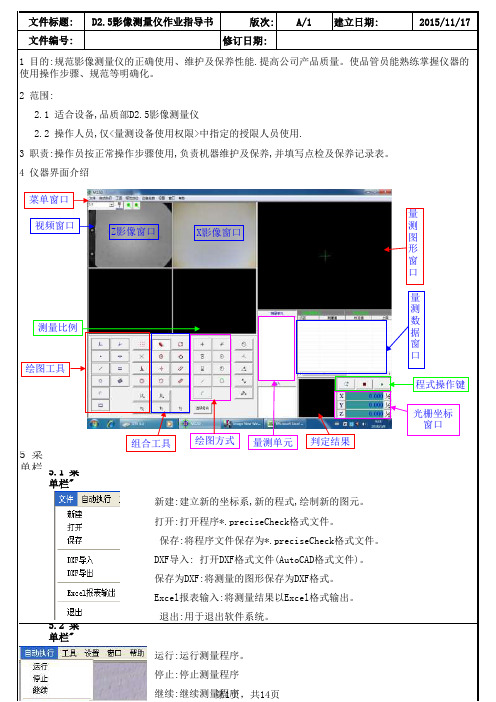
D2.5影像测量仪作业指导书
击
在视,
频如区选用取左键取
可用自鼠动标绘左出键一点
击
,
在视
频在区其矩它形三的条一边
按如顺选序取各取一
框取四条边可
名称
测量角度
测量距离 平行距
首先将所要测 量角度的再两图条 形出浏可览选窗取口自,已 所首需先要将的要角测度量 距窗离口的选两取个两图个 图到形线可,点测到量线出 等距等离,都只是要垂选直 距只离能。测量两条 线间的平行距
文件标题: D2.5影像测量仪作业指导书
版次:
A/1
建相 注立应 : 日设①期定":量。测值"数20据15是/11不/1能7
文件编号:
修订日期:
修改的。
②"上限","下限"栏中
需注意"+","-"号
"形位 公差
比如直线5 与直线1的 在最上面的 图元中栏中 再在右下方 输入“0.02
平行 度,同 7.6 数 据窗口
旋转
图8.4-1 8.5 量 测
第9页,共14页
文件标题: D2.5影像测量仪作业指导书
版次: A/1 建立日期:
2015/11/17
文件编号:
修订日期:
根据工件的形状可考虑直接测量或是借用工装夹具中固定来量测.在此以叶片Y7成品放在工 装夹具中手动量测为例. 8.5.1 将Y7成 品放在 夹具 中,放 在视频 窗口能 全部显 影 且与X 轴或Y 轴垂直 的方向 确定在 1个固 定的位 置,如 右图. 注意窗 口右下 角必须 是 "1.0" 用鼠标 依次点 击"线" →"扫 描线"
消防联动控制系统
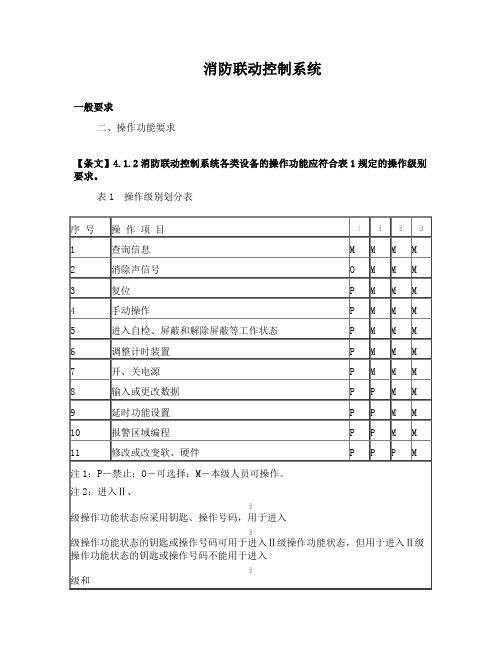
消防联动控制系统一般要求二、操作功能要求【条文】4.1.2消防联动控制系统各类设备的操作功能应符合表1规定的操作级别要求。
表1 操作级别划分表序号操作项目1 查询信息M M M M2 消除声信号O M M M3 复位P M M M4 手动操作P M M M5 进入自检、屏蔽和解除屏蔽等工作状态P M M M6 调整计时装置P M M M7 开、关电源P M M M8 输入或更改数据P P M M9 延时功能设置P P M M10 报警区域编程P P M M11 修改或改变软、硬件P P P M注1:P-禁止;O-可选择;M-本级人员可操作。
注2:进入Ⅱ、级操作功能状态应采用钥匙、操作号码,用于进入级操作功能状态的钥匙或操作号码可用于进入Ⅱ级操作功能状态,但用于进入Ⅱ级操作功能状态的钥匙或操作号码不能用于进入级和级操作功能状态。
三、主要部件性能要求4.1.3.2指示灯4.1.3.2.1应以颜色标识,红色指示火灾报警信号、设备反馈信号、启动信号和延时等报警状态;黄色指示故障、屏蔽、回路自检等系统异常状态;绿色表示主电源和备用电源工作正常。
4.1.3.2.2指示灯应标注功能。
4.1.3.2.3在5Lx-500Lx环境光条件下,在正前方22.5°视角范围内,指示灯应在3m处清晰可见。
4.1.3.2.4采用闪动方式的指示灯每次点亮时间应不小于0.25s,其启动信号指示灯闪动频率应不小于1Hz,故障指示灯闪动频率应不小于0.2Hz。
4.1.3.2.5用一个指示灯同时显示故障、屏蔽和自检三项功能时,故障指示应为闪亮,屏蔽和自检指示应为常亮。
4.1.3.3字母(符)-数字显示器【条文】4.1.3.3.1在5Lx-500Lx环境光条件下,显示字符应在正前方22.5°视角内,0.8m处可读。
4.1.3.3.2采用视窗显示信息的消防联动控制器应至少有一个视窗。
消防联动控制器仅有一个视窗时,应将该视窗至少分为2个界限分明的显示区域。
Avidemux 2.5教程

Avidemux教程默认分类2010-05-10 11:22:16 阅读701 评论0 字号:大中小Avidemux教程Avidemux是一个非常好的免费的转换器和基本编辑(剪切,连接,过滤器)。
它支持最喜欢的AVI视频输入格式,传送,对WMV,ASF的,MKV格式,的MP4,FLV的,VOB 的,可以转换为mpg和XviD格式的AVI像许多视频格式的AVI - DV的,省油,H264的的MP4,FLV的。
这是一个非常基本的指南,让您开始使用Avidemux中。
所需的工具指导问题所需的工具Avidemux中(或下载最新的测试从.au/avidemux/但可能会有点臭虫)指导打开并加入打开你的视频文件。
您还可以参加由选择“文件追加(文件请注意,视频剪辑必须具有相同的宽度,高度,帧率,否则习惯于它的工作)。
如果您打开一个DVD然后选择VTS_01_1.vob(主视频可能是下一个不同的数字,因此您migh尝试不同的VTS_XX_01.vob)和所有的VOBs将自动进口。
选择是,如果你想要索引的图像。
切割如果你想削减然后拖动底部和点击一个设置开始和B的结束吧。
您也可以删除,例如像部分广告,设置键盘上的A和B,然后按删除。
自动格式如果你要转换为VCD,SVCD,DVD,PSP的,iPod或的FLV然后选择菜单中的汽车,选择的格式和Avidemux不会自动更改为您的所有设置。
自定义格式如果你想转换为另一种格式,然后选择下的视频和音频,视频和音频编解码器。
H264的一样,XviD格式,摄像机,MJPEG编码,Huffyuv。
如果你只是想减少或参加视频然后更改下视频和音频复制。
自定义输出文件的大小如果你想转换到自定义文件的大小然后在工具->计算器单击,选择的AVI,设置文件的大小,设置音频比特率(128 - 192kbit / s的大部分东西是好)和Avidemux不会自动设置视频码率使输出的文件大小将会是正确的。
PM2.5检测解析

PM2.5
PM是英文particulate matter(颗粒物)的首字母缩写。PM2.5俗称的细颗粒 物是对空气中直径小于或等于2.5um的固体颗粒或液滴的总称。这些颗粒如 此细小,肉眼是看不到的,它们可以在空气中漂浮数天。人类纤细的头发直 径大约是70um,这就比最大的PM2.5还大了近三十倍。
Page 9
我国PM2.5污染情况
Page
10
国外研究现状
国内外有很多种粉尘检测仪。粉尘检测仪主要由信号采集,信 号处理,数字显示以及对参数的控制和设置等几部分构成。 目前,世界各国对粉尘浓度的测量技术都做了大量研究,研制 了一系列粉尘监测仪器,如粉尘采样器、直读式测尘仪、粉尘浓度传 感器等。特别是粉尘浓度传感器的出现,解决了粉尘采样器、直读式 测尘仪不能实时监测作业场所粉尘浓度的问题。 国外有代表性的产品为英国的Sims lin系列监测仪以及其升级 产品OSIRIS粉尘传感器和计算机粉尘监测系统;德国丁达尔公司生 产的TM系列粉尘仪;俄国研制的Ⅱ-101型自动测尘仪;日本柴田LV 一5E、P5系列微电脑粉尘仪;美国研制的RAM系列实时粉尘监测仪、 粉尘雷达和Auburn公司生产的3400型粉尘监测仪。其中Sims lin系列 监测仪、TM系列粉尘仪、LV-5E、P5系列微电脑粉尘仪采用光散射 法,Ⅱ-101型自动测尘仪采用光吸收法,3400型粉尘监测仪采用摩擦 电法测量粉尘浓度。
Page
2
PM2.5对健康的危害
PM2.5主要对呼吸系统和心血管系统造成伤害,包括呼吸 道受刺激、咳嗽、呼吸困难、降低肺功能、加重哮喘、导 致慢性支气管炎、心律失常、非致命性的心脏病、心肺病 患者的过早死,老人、小孩以及心肺疾病患者是PM2.5污 染的敏感人群。 2012年北京、上海因PM2. 5污染分别造成早死人数为 2349, 2980人,分别占当年死亡总人数的比例为1. 9%, 1. 6%>经济损失分别为18. 6, 23. 7亿元,而2012年北京、 上海因交通意外死亡人数分别为974人和1009人。可见, PM2. 5对人类的危害极大。
c语言程序设计习题1-4章练习
int a=1,b=2,c=3,d=4,k;
k=a>b?a:c>d?c:d
4.已知:int a=5;则执行a+=a-=a*a;语句后,a的值为【6】。
5.下面程序的运行结果是x=【7】,y=【8】。
main( )
{ float x=4.9;int y;
y=(int)x;
char ch;
scanf("%c",&ch);
ch=(ch>=′A′&&ch<=′Z′)?(【1】):ch
printf("【2】\\n",ch);
2.下面程序段的执行结果是x=【3】,y=【4】。
inta=3,b=5,x,y;
x=a+1,b+6;
y=(a+1,b+6);
printf("x=%d,y=%d",x,y);
B)11.000000,12.000000,13
C)11.0000000,12,13
D)11,12.000000,13
15.执行以下程序后x的值为【】。
unsigned int x=65535;
printf("%d\\n",x);
A) 65535B)1C)有错误D)-1
二、填空题
1.下面程序段的功能是输出大写字母对应的小写字母的ASCII码,请填空。
12.执行下面程序段,给x、y赋值时,不能作为数据分隔符的是【】。
int x,y;
scanf("%d%d",&x,&y);
A)空格B)Tab键C)回车D)逗号
13.下面合法的语句是【】。
校园网入侵操作步骤

校园网入侵操作步骤一、条件准备下载三个黑客软件:NTscan变态扫描器、Recton v2.5、DameWare迷你中文版4.5。
NTscan变态扫描器可以对指定IP地址段的所有主机进行扫描,扫描方式有IPC扫描、SMB扫描、WMI扫描三种,可以扫描打开某个指定端口的主机,通过扫描可以得到其中弱口令主机的管理员用户名和密码。
Recton v2.5是一个典型的黑客攻击软件,只要拥有某一个远程主机的管理员账号和密码,并且远程主机的135端口和WMI服务(默认启动)都开启,就可以利用该软件完成远程开关telnet,远程运行CMD命令,远程重启和查杀进程,远程查看、启动和停止服务、查看和创建共享、种植木马、远程清除所有日志等操作。
DameWare迷你中文版4.5是一款远程控制软件,只要拥有一个远程主机的账号和密码,就可以对该主机实施远程监控,监视远程主机的所有操作甚至达到控制远程主机的目的。
另外选择两台操作系统为Windows XP Professional的主机,其中一台作为实施攻击的主机(以下称“主机A”),另一台作为被攻击的主机(以下称“主机B”),并将两台主机接入局域网中。
二、模拟攻击前的准备由于本次模拟攻击所用到的黑客软件均可被较新的杀毒软件和防火墙检测出并自动进行隔离或删除的处理,因此,在模拟攻击前要先将两台主机安装的杀毒软件和防火墙全部关闭。
然后打开“控制面板”中的“windows安全中心”,执行“windows防火墙”设置,将“windows防火墙”也关闭,如图所示。
由于在默认的情况下,两台主机的IPC$共享、默认共享、135端口和WMI服务均处于开启状态,因此对共享、端口和服务不做任何调整。
设置主机A的IP地址为“172.16.100.1”,主机B的IP地址为“172.16.100.2”(IP地址可以根据实际情况自行设定),两台主机的子网掩码均应为“255.255.0.0”。
设置完成后用“ping”命令测试两台主机连接成功。
计算机系统结构__《张晨曦、王志英》课后习题参考答案
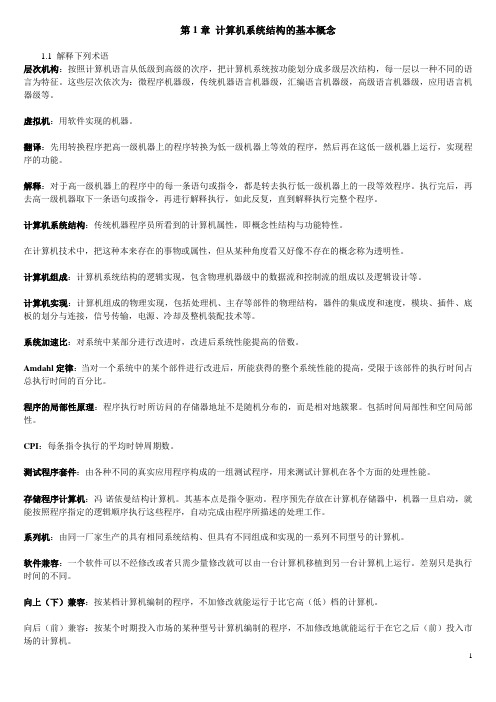
第1章计算机系统结构的基本概念1.1 解释下列术语层次机构:按照计算机语言从低级到高级的次序,把计算机系统按功能划分成多级层次结构,每一层以一种不同的语言为特征。
这些层次依次为:微程序机器级,传统机器语言机器级,汇编语言机器级,高级语言机器级,应用语言机器级等。
虚拟机:用软件实现的机器。
翻译:先用转换程序把高一级机器上的程序转换为低一级机器上等效的程序,然后再在这低一级机器上运行,实现程序的功能。
解释:对于高一级机器上的程序中的每一条语句或指令,都是转去执行低一级机器上的一段等效程序。
执行完后,再去高一级机器取下一条语句或指令,再进行解释执行,如此反复,直到解释执行完整个程序。
计算机系统结构:传统机器程序员所看到的计算机属性,即概念性结构与功能特性。
在计算机技术中,把这种本来存在的事物或属性,但从某种角度看又好像不存在的概念称为透明性。
计算机组成:计算机系统结构的逻辑实现,包含物理机器级中的数据流和控制流的组成以及逻辑设计等。
计算机实现:计算机组成的物理实现,包括处理机、主存等部件的物理结构,器件的集成度和速度,模块、插件、底板的划分与连接,信号传输,电源、冷却及整机装配技术等。
系统加速比:对系统中某部分进行改进时,改进后系统性能提高的倍数。
Amdahl定律:当对一个系统中的某个部件进行改进后,所能获得的整个系统性能的提高,受限于该部件的执行时间占总执行时间的百分比。
程序的局部性原理:程序执行时所访问的存储器地址不是随机分布的,而是相对地簇聚。
包括时间局部性和空间局部性。
CPI:每条指令执行的平均时钟周期数。
测试程序套件:由各种不同的真实应用程序构成的一组测试程序,用来测试计算机在各个方面的处理性能。
存储程序计算机:冯·诺依曼结构计算机。
其基本点是指令驱动。
程序预先存放在计算机存储器中,机器一旦启动,就能按照程序指定的逻辑顺序执行这些程序,自动完成由程序所描述的处理工作。
系列机:由同一厂家生产的具有相同系统结构、但具有不同组成和实现的一系列不同型号的计算机。
2024年铁路车务连结员学习手册

2024年铁路车务连结员学习手册一、应知应会部分1.关门车是指关闭截断塞门的车辆。
2.列车中相互连挂的车钩中心水平线高度差不得超过75mm。
3.线路两旁堆放货物距钢轨头部外侧不得少于1.5m。
4.摘车的作业程序应是一关前、二关后、三摘风管、四提钩。
5.信号是指示列车运行和调车工作的命令,有关行车人员必须按信号指示办理。
6.使用人力制动机制动时要提前检查制动链、制动轴、手轮、制动台等是否良好。
7.正线是指连接车站并贯穿或直股伸入车站的线路。
8. 靠近“140”产品车前后的隔离车,禁止编入装载高出车帮易窜动货物的车辆。
9. 隔开设备是指安全线、避难线、平行进路及能起隔开作用的防护道岔。
10.单线区段确定站界为两端进站信号机柱中心线内方。
11. 编组无列尾装置的列车,调车组应保证全列车钩连结良好,无列检作业时,软管的连结和折角塞门的开启由调车组人员负责。
12. 车辆两车钩在闭锁位置,车钩钩舌内侧面之间的距离为车辆的全长。
13. 轨道起重机编入列车,通风不制动的,按“关门车”办理。
14. 机车车辆施行制动时,闸瓦抱压车轮起制动作用的压力称闸瓦压力。
15. 中间站调车作业中,对临时停留的车辆必须拧紧车辆两端人力制动机或以铁鞋(止轮器)牢靠固定。
16.旅客列车因途中自动制动机临时故障又不能修复时,准许关闭一辆。
17. 与正线、到发线衔接的货物线、专用线停留车辆时,不论车站防溜方式如何,其靠到发线端必须拧紧人力制动机,并以铁鞋(止轮器、防溜枕木)牢靠固定。
18. 调车作业没有显示十、五、三车距离信号不准挂车(单机除外)。
19.推进车辆前必须进行试拉、前端应派人瞭望。
20.调车作业中严格控制速度,不准超速作业。
21.在正线、到发线上调车作业时,摘下的车辆无论是否影响下一钩作业,均不得停留在警冲标外方。
22.跟踪出站调车最远不得超过站界500m。
23.接近被连挂车辆,速度不超过5km/h。
24.在尽头线上调车时,距线路终端应有10m的安全距离。
C语言程序设计学习指导与实践教程习题和实验解答(第2章)2
C语言程序设计学习指导与实践教程——第2章习题和实验解答2.1 C语言概述1.【习题解答】1结构化程序有三大基本结构:顺序、分支和循环.2..算法可以理解为有基本运算及规定的运算顺序所构成的完整的解题步骤。
或者看成按照要求设计好的有限的确切的计算序列,并且这样的步骤和序列可以解决一类问题。
有穷性:一个算法应包含有限的操作步骤而不能是无限的。
确定性:算法中每一个步骤应当是确定的,而不能应当是含糊的,有零个或多个输入输出,有一个或多个输出。
有效性:算法中每一个步骤应当能有效地执行,并得到确定的结果。
对于程序设计人员,必须会设计算法,并根据算法写出程序。
可以用自然语言、流程图、伪代码和计算机语言表示算法。
3.C语言的主要特点有:语言简洁、紧凑,使用方便、灵活。
ANSI C一共只有32个关键字;控制语句丰富,程序书写自由,主要用小写字母表示,压缩了一切不必要的成分;运算符丰富,共有34种;数据结构类型丰富;具有结构化的控制语句;语法限制不太严格,程序设计自由度大;C语言允许直接访问物理地址,能进行位(bit)操作,能实现汇编语言的大部分功能,可以直接对硬件进行操作。
因此有人把它称为中级语言;生成目标代码质量高,程序执行效率高;与汇编语言相比,用C语言写的程序可移植性好。
4.用传统流程图表达如下:5. 计算机硬件系统的组成:计算机硬件系统主要由运算器、控制器、存储器、输入设备和输出设备构成,运算器和控制器合称为中央处理器(CPU),输入设备和输出设备统称为外部设备。
6.计算机网络常用的传输介质:分为有线介质和无线介质;有线介质包括光纤、同轴电缆和双绞线;无线介质包括红外信号、微波等。
2.2 数据类型与表达式1.【习题解答】一、选择题1.D2.B3.A4.B5.A6.B7.D8.D9.C二、填空题1.整型、实型、字符型、枚举类型2.3.5000003.逗号运算符4.三,自右向左5.1,06.32767三、编程题1.已知球的半径为1.5cm,计算球的体积。
风力发电机组2.5及5基础和吊装监理实施细则
风力发电机组2.5及5基础和吊装监理实施细则中船重工(重庆)海装风电设备有限公司张北风电项目2.5及5MW复合基础施工及风机吊装工程监理实施细则重庆兴宇工程建设监理有限公司2011年月日监理实施细则签批目录一、监理工作依据二、监理准则三、监理目标四、工程概况五、监理工作主要程序和流程六、土建部分七、风机吊装及电气安装部分中船重工(重庆)海装风电设备有限公司张北风电项目2.5及5MW复合基础施工及风机吊装工程一、监理工作依据严格按照中船重工(重庆)海装风电设备有限公司张北风电项目2.5及5MW复合基础施工及风机吊装工程设计、制造的有关国家及行业制订的规范、标准执行,并满足国家技术监督局制定的有关标准。
中船重工(重庆)海装风电设备有限公司张北风电项目 2.5及5MW 复合基础施工及风机吊装工程执行的规范和标准,但不限于下列标准的规范,有更高更新版本标准按照新标准执行:1、中船重工(重庆)海装风电设备有限公司张北风电项目2.5及5MW 复合基础施工及风机吊装工程招标文件、施工合同2、上海同济大学建筑设计研究院(集团)有限公司(中船重工重庆海装风电设备有限公司张北风电项目2.5及5MW复合基础施工及风机吊装工程)设计图纸3、《混凝土结构工程施工及验收规范》 GB50204------924、《工程式测量规范》 GB50204----19935、《地基与基础工程施工质量验收规范》 GB50202----20026、《建筑工程施工质量验收统一标准》 GB50300---20017、《风电基础规定》 d003------20078、《钢筋焊接及验收规程》 JGJl8-----20039、《普通混凝土配合比设计规程》 JGJ55-----200010、《施工现场临时用电安全技术规范》 JGJ46-------8811、《建设工程安全生产管理条理》12、《建设工程文件归档整理规定》 GB/T50328--200213、《风力发电场安全规程)》 JCJ59--------9914、《钢结构工程施工质量验收规范》 GB50205----2001《钢结构高强螺栓连接的设计、施工及验收规范》JGJ82------199115、16、《建筑结构荷载规范》 GB50009------200117、《建筑抗震设计规范》 GB50011------200118、《建筑工程项目管理规范》 GB50326------200119、《风力发电场项目建设工程验收规程》 DLT5191------200420、《超重机安全规程》 GB-----------606721、《建筑机械使用安全技术规程》 JQJ33---------200122、《电力建设安全施工管理规定》23、《2.5及5MW风力发电机组安装手册》24、《工程建设标准强制性条文》电力工程部分2006版25、大型设备吊装工程施工工艺标准》(SH3515-90)二、监理准则守法、诚信、公正、科学。
网络安全技术及应用实践教程课件2.2-2.5
图2-12 用“netstat -an”命令查看连接和开放的端口
*2.3知识拓展 常用网络安全管理工具
2.3.4 查询删改用户信息命令
net命令的主要功能是查看主机上的用户列表、添加和删除 用户、与对方主机建立连接、启动或停止的网络服务等.
案例2-6 利用 net user 查看计算机上的用户列表,以“ net user用
在公共地区,如机场、火车站等,一些用户需要通过无线 接入Internet、浏览web页面、接收e-mail,对此安全可靠地 接入Internet很关键。这些区域通常由网络运营商提供网络设 施,对用户认证问题至关重要。否则,可能造成盗用服务等危 险,为提供商和用户造成损失。AboveCable提出使用IEEE 802.1x的认证方式,并通过后台RADIUS服务器进行认证计费。
案例2-4 如果只使用不带参数的ping命令,窗口将会 显示命令及其各种参数使用的帮助信息,如图2-9所示。使 用ping命令的语法格式是:ping 对方计算机名或者IP地址. 如果连通的话,返回的连通信息如图2-10所示。
图2-9 使用ping命令的帮助信息
图2-10 利用ping命令检测网络的连通性
针对公共场所存在相邻用户互访引起的 Nhomakorabea据泄漏问题,设 计了公共场所专用的AP— HotSpot AP。可将连接到其所有无 线终端的MAC地址自动记录,在转发报文的同时,判断该段报 文是否发送给MAC列表的某个地址,若在列表中则中断发送, 实现用户隔离。
PLC原理及应用全套课件

第2章 可编程序控制器概论
SIMATIC S7-200系统CPU 22X系列PLC主机及I/O特 性如表3.2所示。
表3.2 主机及I/O特性
第2章 可编程序控制器概论
2. 存储系统 (1)存储系统 (2)存储器及使用 (3)存储安全
第2章 可编程序控制器概论
个人计算机
CPU
2.1 S系列PLC发展概述 2.2 S7-200 PLC系统组成 2.3 编程元件及程序知识 2.4 相关设备 2.5 工业软件
第2章 可编程序控制器概论
本章学习目的
本章以西门子公司生产的S7-200系列小型可编 程序控制器为例,介绍具体型号的PLC,内容包 括: l S系列PLC发展概述 l S7-200 可编程序控制器的系统组成 l 编程元件及程序知识 l 相关设备 l 常用工业软件
第2章 可编程序控制器概论
开始
内部处理
通信处理
图
2.4
否
RUN 方式?
工
作
是
原
输入扫描
理
图
执行用户程序
输出处理
第2章 可编程序控制器概论
可编程序控制器的输入处理、执行用户程序 和输出处理过程的原理如图2.5所示。 PLC执行的五个阶段,称为一个扫描周期, PLC完成一个周期后,又重新执行上述过程, 扫描周而复始地进行。
PLC原理及应用
多多省购物网
第2章 可编程序控制器概论
第1章 可编程序控制器概论
1.1 PLC的发展、分类及应用 1.2 结构和工作原理 1.3 技术性能指标 1.4 编程语言
第2章 可编程序控制器概论
本章内容包括:
l PLC的发展、分类及应用 l 结构及工作原理 l 主要技术性能指标 l 常用编程语言
cp1e脉冲输出程序实例

cp1e脉冲输出程序实例一、程序介绍1.1 程序作用本程序实现了使用cp1e PLC控制脉冲输出的功能。
通过控制PLC的输出点,能够产生精确的脉冲信号,用于驱动外部设备。
1.2 开发环境•操作系统:Windows 10•开发工具:CX-Programmer V9.61.3 PLC设置本程序基于OMRON CP1E PLC,编程语言使用Ladder Diagram (LD)语言。
在程序开发之前,需要先将PLC与电脑连接,并进行相应的设置。
1.4 脉冲输出装置脉冲输出装置是PLC与外部设备的连接接口,用于将PLC输出的电信号转换为脉冲信号,从而驱动外部设备工作。
确保脉冲输出装置与PLC的连接正确无误,并按照设备说明进行设置。
二、程序设计2.1 创建新项目首先,打开CX-Programmer软件,在菜单中选择「文件」-「新建项目」,然后填写项目名称并选择PLC型号为CP1E。
2.2 程序初始化在程序开头添加一个标签「P_Initial」,用于进行程序的初始化工作。
在该标签下,进行PLC输入输出配置的设置,例如设置输出点为Pulse Output 0(Y0输出点),注意设置脉冲输出的频率和占空比,根据外部设备的要求进行相应设置。
2.3 主程序设计主程序中需要定义一个标签,用于进行脉冲输出的控制。
在标签下,添加一个输出指令,将输出点Pulse Output 0(Y0输出点)设置为ON,然后添加一个延时指令,设定延时时间。
接着,将输出点Pulse Output 0设置为OFF,实现脉冲输出。
2.4 循环控制通过添加循环控制的逻辑,可以实现多次循环输出脉冲。
在主程序的末尾,添加一个标签「P_Loops」,用于循环控制。
在该标签下,通过添加计数器指令和比较指令,控制循环的次数和循环结束的条件。
2.5 程序结束在程序的末尾添加一个标签「P_End」,用于程序结束的处理工作。
在该标签下,可以添加一些清理工作,例如将输出点设置为初始状态,保证程序的下次运行能够正确执行。
ABAQUS用户分析手册中文目录
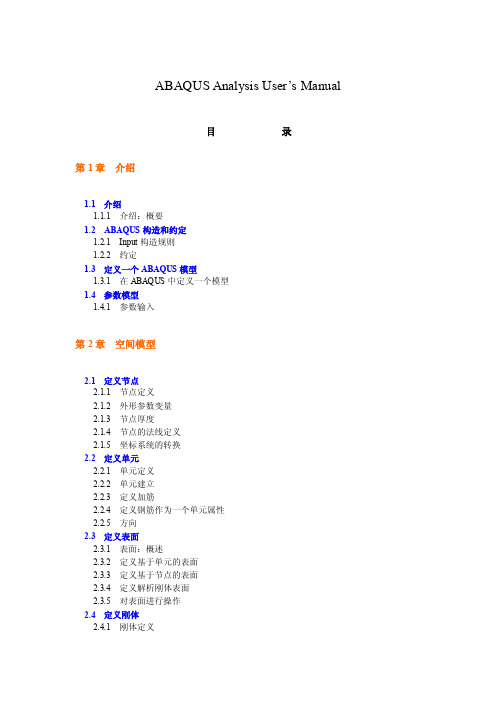
ABAQUS Analysis User’s Manual目录第1章介绍1.1 介绍1.1.1 介绍:概要1.2 ABAQUS构造和约定1.2.1 Input构造规则1.2.2 约定1.3 定义一个ABAQUS模型1.3.1 在ABAQUS中定义一个模型1.4 参数模型1.4.1 参数输入第2章空间模型2.1 定义节点2.1.1 节点定义2.1.2 外形参数变量2.1.3 节点厚度2.1.4 节点的法线定义2.1.5 坐标系统的转换2.2 定义单元2.2.1 单元定义2.2.2 单元建立2.2.3 定义加筋2.2.4 定义钢筋作为一个单元属性2.2.5 方向2.3 定义表面2.3.1 表面:概述2.3.2 定义基于单元的表面2.3.3 定义基于节点的表面2.3.4 定义解析刚体表面2.3.5 对表面进行操作2.4 定义刚体2.4.1 刚体定义2.5 定义积分输出项2.5.1 积分输出项的定义2.6 定义不做结构材料的质量2.6.1 不做结构材料的质量定义2.7 定义分布2.7.1 分布的定义2.8 定义显示体2.8.1 显示体的定义2.9 定义一个装配2.9.1 定义一个装配2.10 定义矩阵2.10.1 定义矩阵第3章执行程序3.1 执行程序:概述3.1.1 执行ABAQUS程序:概述3.2 执行程序3.2.1 用于获得信息的执行程序3.2.2 用于ABAQUS/Standard和ABAQUS/Explic it的执行程序3.2.3 用于ABAQUS/CAE的执行程序3.2.4 用于ABAQUS/Viewer的执行程序3.2.5 用于Python的执行程序3.2.6 用于参数研究的执行程序3.2.7 用于ABAQUS HTML文件的执行程序3.2.8 用于许可证有效性的执行程序3.2.9 用于结果文件(.fil)的ASCII转化的执行程序3.2.10 用于连接结果文件(.fil)的执行程序3.2.11 用于查询关键词/问题数据库的执行程序3.2.12 用于获取例子input文件的执行程序3.2.13 用于用户自定义执行和子程序的执行程序3.2.14 用于input文件和输出数据库升级效用的执行程序3.2.15 用于生成输出数据报告的执行程序3.2.16 用于重启动分析连接输出数据库(.odb)的执行程序3.2.17 用于结合子结构输出的执行程序3.2.18 用于网络输出数据库文件连接器的执行程序3.2.20 用于将NASTRAN大批数据文件转化为ABAQUS中input文件的执行程序3.2.21 用于将PAM-CRASH输入文件转化为部分ABAQUS中input文件的执行程序3.2.22 用于将ABAQUS输出数据库文件转为NASTRAN Output2结果文件的执行程序3.2.23 用于和ZAERO交换ABAQUS数据的执行程序3.2.24 加密和解密ABAQUS输入数据的执行程序3.2.25 用于job执行控制的执行程序3.3 环境文件设置3.3.1 使用ABAQUS环境文件设置3.4 管理内存和硬盘资源3.4.1 在ABAQUS中管理内存和硬盘资源3.5 文件扩展定义3.5.1 通过ABAQUS使用文件扩展定义3.6 FORTRAN单位数3.6.1 通过ABAQUS使用的FORTRAN单位数第4章输出4.1 输出4.1.1 输出4.1.2 数据和结果文件的输出4.1.3 输出数据库的输出4.2 输出变量4.2.1 ABAQUS/Standard输出变量符4.2.2 ABAQUS/Explicit输出变量符4.3 后处理器4.3.1 后处理器第5章文件输出格式5.1 访问结果文件5.1.1 访问结果文件:概述5.1.2 结果文件输出格式5.1.3 访问结果文件信息5.1.4 用于访问结果文件的增效程序第6章分析程序6.1 介绍6.1.1 程序:概述6.1.2 一般的和线性扰动的程序6.1.3 多重荷载情况分析6.1.4 直接线性方程求解6.1.5 迭代线性方程求解6.2 静态应力/位移分析6.2.1 静态应力分析程序:概述6.2.2 静态应力分析6.2.3 特征值崩溃预测6.2.4 不稳定的崩塌和崩溃后分析6.2.5 准静态分析6.2.6 直接循环分析6.3 动态应力/位移分析6.3.1 动态分析程序:概述6.3.2 使用直接积分的隐式动态分析6.3.3 显示动态分析6.3.4 直接求解的稳定状态动态分析6.3.5 自然频率的提取6.3.6 复杂特征值的提取6.3.7 瞬时模态动态分析6.3.8 基于范数的稳定状态动态分析6.3.9 基于子空间的稳定状态动态分析6.3.10 响应谱分析6.3.11 随机响应分析6.4 稳定状态的运输分析6.4.1 稳定状态的运输分析6.5 热传播和温度-应力分析6.5.1 热传播分析程序:概述6.5.2 非耦合的热传播分析6.5.3 连续耦合的温度-应力分析6.5.4 全耦合的温度-应力分析6.5.5 绝热分析6.6 电分析6.6.1 电分析程序:概述6.6.2 耦合温度-电分析6.6.3 压电分析6.7 耦合多孔流体流动和应力分析6.7.1 耦合多孔流体扩散和应力分析6.7.2 地应力状态6.8 质量扩散分析6.8.1 质量扩散分析6.9 声学和振动分析6.9.1 声学、振动和耦合声(波)-结构分析6.10 ABAQUS/Aqua分析6.10.1 ABAQUS/Aqua分析6.11 退火6.11.1 退火程序第7章分析求解和控制7.1 求解非线性问题7.1.1 求解非线性问题7.1.2 接触迭代7.2 分析的收敛控制7.2.1 收敛和时间积分准则:概述7.2.2 普遍使用的控制参数7.2.3 非线性问题的收敛准则7.2.4 瞬态问题中的时间积分精度第8章分析技术:介绍8.1 介绍8.1.1 分析技术:概述第9章连续分析的技术9.1 重启动一个分析9.1.1 重启动一个分析9.2 输入和传递结果9.2.1 在ABAQUS分析中传递结果:概述9.2.2 在ABAQUS/Explicit和ABAQUS/Standard中传递结果9.2.3 将ABAQUS/Standard分析中的结果传递给另一个第10章模型提取10.1 子结构10.1.1 使用子结构10.1.2 定义子结构10.2 子模型10.2.1 子模型10.3 对称模型的生成,结果传递,循环对称模型的分析10.3.1 对称模型的生成10.3.2 将一个对称网格或一个部分三维网格的结果传递到完全三维网格10.3.3 分析存在循环对称的模型10.4 梁横截面网格划分10.4.1 梁横截面网格划分第11章特定目标的技术11.1 惯量解除11.1.1 惯量解除11.2 网格修改或置换11.2.1 单元和接触对的移除和重新激活11.3 几何不完整11.3.1 在模型中引入一个几何不完整11.4 断裂力学11.4.1 断裂力学:概述11.4.2 围道积分评价11.4.3 裂缝扩展分析11.5 静水力学的流动模型11.5.1 模拟充满流体的空穴11.6 基于表面的流动模型11.6.1 基于表面的流体空穴:概述11.6.2 定义流体空穴11.6.3 定义流体的交换11.6.4 定义充气机11.7 质量数标度11.7.1 质量数标度11.8 稳定状态的探测11.8.1 稳定状态的探测11.9 平行执行11.9.1 ABAQUS中的平行执行11.9.2 ABAQUS/Standard中的平行执行11.9.3 ABAQUS/Explicit中的平行执行第12章自适应技术12.1 自适应技术:概述12.1.1 自适应技术12.2 ALE自适应网格划分12.2.1 ALE自适应网格划分:概述12.2.2 在ABAQUS/Explicit中定义ALE自适应网格划分区域12.2.3 ABAQUS/Explicit中的ALE自适应网格划分和重新绘图12.2.4 ABAQUS/Explicit中Eulerian自适应网格划分区域的模型技术12.2.5 ABAQUS/Explicit中ALE自适应网格划分的输出和诊断12.2.6 在ABAQUS/Standard中定义ALE自适应网格划分区域12.2.7 ABAQUS/Standard中的ALE自适应网格划分和重新绘图12.3 自适应重新网格划分12.3.1 自适应重新网格划分:概述12.3.2 误差指示器12.3.3 基于求解的网格划分尺寸12.4 网格划分置换后的连续分析12.4.1 网格-网格求解映射第13章扩展ABAQUS分析的功能13.1 联合仿真13.1.1 联合仿真:概述13.1.2 为联合仿真准备一个ABAQUS分析13.1.3 使用MpCCI联合仿真13.1.4 含有MADYMO的联合仿真13.2 用户子程序和增效程序13.2.1 用户子程序:概述13.2.2 可用的用户子程序13.2.3 可用的增效程序第14章设计敏感度分析14.1 设计敏感度分析14.1.1 设计敏感度分析第15章参数的研究15.1 脚本参数的研究15.1.1 脚本参数的研究15.2 参数的研究:命令15.2.1 为参数研究结合参数样本15.2.2 在参数研究中约束联合的参数值15.2.3 为参数研究定义参数15.2.4 执行参数研究设计分析15.2.5 聚集参数研究的结果15.2.6 为一个参数研究生成分析任务数据15.2.7 指定参数研究结果的来源15.2.8 创建一个参数研究15.2.9 报告参数研究的结果15.2.10 参数研究的样本参数第16章材料:介绍16.1 介绍16.1.1 材料库:概述16.1.2 材料数据的定义16.1.3 材料的结合行为16.2 一般属性16.2.1 密度第17章弹性力学性质17.1 概述17.1.1 弹性行为:概述17.2 线弹性17.2.1 线弹性行为17.2.2 无压缩或无拉伸17.2.3 平面应力各向正交异性失效测量17.3 多孔弹性17.3.1 多孔材料的弹性行为17.4 亚弹性17.4.1 亚弹性行为17.5 超弹性17.5.1 橡胶类材料的超弹性行为17.5.2 泡沫胶的超弹性行为17.6 Mullins效果17.6.1 橡胶类材料的Mullins效果17.6.2 泡沫胶的能量消散17.7 粘弹性17.7.1 时域粘弹性17.7.2 频域粘弹性17.8 滞后作用17.8.1 弹性体(人造橡胶)的滞后作用17.9 状态方程17.9.1 状态方程第18章非弹性力学性质18.1 概述18.1.1 非弹性行为18.2 金属塑性18.2.1 经典金属塑性18.2.2 承受循环荷载下的金属的模型18.2.3 率相关屈服18.2.4 率相关塑性:蠕变和膨胀18.2.5 退火和融化18.2.6 各向异性的屈服/蠕变18.2.7 Johnson-Cook塑性18.2.8 动态失效模型18.2.9 多孔金属塑性18.2.10 灰铸铁塑性18.2.11 两层粘塑性18.2.12 ORNL(Oak Ridge National Laboratory)本构模型18.2.13 变形塑性18.3 其他塑性模型18.3.1 扩展的Drucker-Prager模型18.3.2 修正的Drucker-Prager/CAP模型18.3.3 Mohr-Coulomb塑性18.3.4 临界状态(粘土)塑性模型18.3.5 可压碎的泡沫塑性模型18.4 有接缝的材料18.4.1 有接缝的材料模型18.5 混凝土18.5.1 混凝土涂抹开裂18.5.2 混凝土开裂模型18.5.3 混凝土塑性损伤第19章累积损伤和失效19.1 累积损伤和失效:概述19.1.1 累积损伤和失效19.2 延性金属的损伤和失效19.2.1 延性金属的损伤和失效:概述19.2.2 延性金属的损伤开始19.2.3 延性金属的损伤演化和单元移除19.3 加筋复合物的损伤和失效19.3.1 加筋复合物的损伤和失效:概述19.3.2 加筋复合物的损伤开始19.3.3 加筋复合物的损伤演化和单元移除第20章其他材料性质20.1 力学属性20.1.1 材料阻尼20.1.2 热膨胀20.2 热传播属性20.2.1 温度属性:概述20.2.2 传导性20.2.3 比热20.2.4 潜伏热20.3 声属性20.3.1 声媒介20.4 静水力学的流体属性20.4.1 静水力学的流体模型20.5 质量扩散属性20.5.1 扩散能力20.5.2 溶解性20.6 电属性20.6.1 电导率20.6.2 压电行为20.7 多孔流体流动属性20.7.1 多孔流体流动属性20.7.2 渗透性20.7.3 多孔体模量20.7.4 吸附作用20.7.5 膨胀凝胶体20.7.6 湿度膨胀20.8 用户定义材料20.8.1 用户定义的材料力学行为20.8.2 用户定义的材料温度行为第21章单元:介绍21.1 介绍21.1.1 单元库:概述21.1.2 选择单元的维度21.1.3 对一个分析类型选择合适的单元21.1.4 截面控制21.1.5 根据单元-单元原理分配单元属性第22章连续单元22.1 多用途的连续单元22.1.1 固体(连续)单元22.1.2 一维固体(链接)单元库22.1.3 二维固体单元库22.1.4 三维固体单元库22.1.5 圆柱固体单元库22.1.6 轴对称固体单元库22.1.7 含有非线性、不均匀变形的轴对称固体单元22.2 无限单元22.2.1 无限单元22.2.2 无限单元库22.3 翘曲单元22.3.1 翘曲单元22.3.1 翘曲单元库第23章结构单元23.1 膜单元23.1.1 膜单元23.1.2 一般的膜单元库23.1.3 圆柱膜单元库23.1.4 轴对称膜单元库23.2 杆单元23.2.1 杆单元23.2.2 杆单元库23.3 梁单元23.3.1 梁模型:概述23.3.2 选择一个梁横截面23.3.3 选择一个量单元23.3.4 梁单元横截面的方向23.3.5 梁截面的行为23.3.6 在分析中使用一个梁截面积分来定义截面行为23.3.7 使用一个一般的梁截面来定义截面行为23.3.8 梁单元库23.3.9 梁横截面库23.4 框架单元23.4.1 框架单元23.4.2 框架截面属性23.4.3 框架单元库23.5 弯头单元23.5.1 有变形横截面的管和管弯头:弯头单元23.5.2 弯头单元库23.6 壳单元23.6.1 壳单元:概述23.6.2 选择一个壳单元23.6.3 定义传统壳单元的初始尺寸23.6.4 壳截面行为23.6.5 在分析中使用一个壳截面积分来定义截面行为23.6.6 使用一个一般壳截面来定义截面行为23.6.7 三维传统的壳单元库23.6.8 连续壳单元库23.6.9 轴对称壳单元库23.6.10 含有非线性、非轴对称变形的轴对称壳单元第24章惯性单元、刚体单元和电容单元24.1 点质量单元24.1.1 点质量24.1.2 质量单元库24.2 旋转惯量单元24.2.1 旋转惯性24.2.2 旋转惯性单元库24.3 刚体单元24.3.1 刚体单元24.3.2 刚体单元库24.4 电容单元24.4.1 点电容24.4.2 电容单元库第25章连接器单元25.1 连接器单元25.1.1 连接器:概述25.1.2 连接器单元25.1.3 连接器驱动25.1.4 连接器单元库25.1.5 连接类型库25.2 连接器单元行为25.2.1 连接器的行为25.2.2 连接器的弹性行为25.2.3 连接器的阻尼行为25.2.4 用于耦合行为的连接器功能25.2.5 连接器的摩擦行为25.2.6 连接器的塑性行为25.2.7 连接器的损伤行为25.2.8 连接器的停止和锁定25.2.9 连接器的失效模型第26章特定目标的单元26.1 弹簧单元26.1.1 弹簧26.1.2 弹簧单元库26.2 阻尼器单元26.2.1 阻尼器26.2.2 阻尼器单元库26.3 柔性接头单元26.3.1 柔性接头单元26.3.2 柔性接头单元库26.4 分布耦合单元26.4.1 分布耦合单元26.4.2 分布耦合单元库26.5 粘结单元26.5.1 粘结单元:概述26.5.2 选择一个粘结单元26.5.3 含有粘结单元的模型26.5.4 定义粘结单元的初始尺寸26.5.5 使用连续方法定义粘性单元的本构响应26.5.6 使用牵引-分离描述定义粘性单元的本构响应26.5.7 在粘结单元的缺口内定义流体的本构响应26.5.8 两维的粘结单元库26.5.9 三维的粘结单元库26.5.10 轴对称粘结单元库26.6 垫圈单元26.6.1 垫圈单元:概述26.6.2 选择一个垫圈单元26.6.3 在一个模型中包含垫圈单元26.6.4 定义垫圈单元的初始尺寸26.6.5 使用一个材料模型定义垫圈行为26.6.6 直接使用一个垫圈行为模型定义垫圈行为26.6.7 两维垫圈单元库26.6.8 三维垫圈单元库26.6.9 轴对称垫圈单元库26.7 表面单元26.7.1 表面单元26.7.2 一般的表面单元库26.7.3 圆柱表面单元库26.7.4 轴对称表面单元库26.8 静水力学的流体单元26.8.1 静水力学的流体单元26.8.2 静水力学的流体单元库26.8.3 流体链接单元26.8.4 静水力学的流体连接库26.9 管座单元26.9.1 管座单元26.9.2 管座单元库26.10 线弹簧单元26.10.1 模拟壳中部分贯通裂缝的线弹簧单元26.10.2 线弹簧单元库26.11 弹-塑性接头26.11.1 弹-塑性接头26.11.2 弹-塑性接头单元库26.12 拉链单元26.12.1 拉链26.12.2 拉链单元库26.13 桩-土单元26.13.1 桩-土相互作用单元26.13.2 桩-土相互作用单元库26.14 声学的界面单元26.14.1 声学界面单元26.14.2 声学界面单元库26.15 用户自定义的单元26.15.1 用户自定义的单元26.15.2 用户自定义的单元库第27章施加条件27.1 概述27.1.1 施加条件:概述27.1.2 幅值曲线27.2 初始条件27.2.1 初始条件27.3 边界条件27.3.1 边界条件27.4 荷载27.4.1 施加荷载:概述27.4.2 集中荷载27.4.3 分布荷载27.4.4 温度荷载27.4.5 声荷载27.4.6 多孔流体流动27.5 指定装配荷载27.5.1 指定装配荷载27.6 预先确定场27.6.1 预先确定场第28章约束28.1 概述28.1.1 运动约束:概述28.2 多点约束28.2.1 线性约束方程28.2.2 一般多点约束28.2.3 运动的耦合约束28.3 基于表面的约束28.3.1 网格打结约束28.3.2 耦合约束28.3.3 壳-固体耦合28.3.4 不依赖网格的扣件28.4 植入单元28.4.1 植入单元28.5 单元释放终点28.5.1 单元释放终点28.6 过约束检查28.6.1 过约束检查第29章定义接触的相互作用29.1 概述29.1.1 接触相互作用分析:概述29.2 在ABAQUS/Standard中定义接触29.2.1 在ABAQUS/Standard中定义接触对29.2.2 ABAQUS/Standard接触对的接触公式29.2.3 ABAQUS/Standard接触对的强制约束方法29.2.4 在ABAQUS/Standard中模拟接触的干涉配合29.2.5 在ABAQUS/Standard接触对中调整初始面的位置和指定初始清空29.2.6 移除/重新激活ABAQUS/Standard接触对29.2.7 在ABAQUS/Standard中定义打结接触29.2.8 延伸主面和滑移线29.2.9 如果子结构存在的接触模拟29.2.10 如果不均匀-对称单元存在的接触模拟29.2.11 在ABAQUS/Standard中模拟接触时普遍存在的困难29.2.12 在ABAQUS/Standard中调整接触控制29.3 在ABAQUS/Explicit中定义一般接触29.3.1 定义一般接触的相互作用29.3.2 一般接触的表面属性29.3.3 一般接触的接触属性29.3.4 一般接触的接触公式29.3.5 一般接触的初始过闭合的分解和指定初始清空29.3.6 一般接触的接触控制29.4 在ABAQUS/Explicit中定义接触对29.4.1 在ABAQUS/Explicit中定义接触对29.4.2 ABAQUS/Explicit接触对的表面属性29.4.3 ABAQUS/Explicit接触对的接触属性29.4.4 ABAQUS/Explicit接触对的接触公式29.4.5 在ABAQUS/Explicit接触对中调整初始面的位置和指定初始清空29.4.6 在ABAQUS/Explicit中使用接触对算法模拟接触时普遍存在的困难第30章接触属性模型30.1 接触力学属性30.1.1 接触力学属性:概述30.1.2 接触的压力-过闭合关系30.1.3 接触阻尼30.1.4 接触阻塞30.1.5 摩擦行为30.1.6 用户定义的界面本构行为30.1.7 贯入式压力荷载30.1.8 松解面的相互作用30.1.9 易碎的结合30.2 温度接触属性30.2.1 温度接触属性30.3 电接触属性30.3.1 电接触属性30.4 多孔流体接触属性30.4.1 多孔流体接触属性第31章ABAQUS/Standard中的接触单元31.1 模拟接触的单元31.1.1 模拟接触的单元31.2 缺口接触单元31.2.1 缺口接触单元31.2.2 缺口单元库31.3 管-管接触单元31.3.1 管-管接触单元31.3.2 管-管接触单元库31.4 滑动线接触单元31.4.1 滑动线接触单元31.4.2 轴对称滑动线接触单元库31.5 刚体表面接触单元31.5.1 刚体表面接触单元31.5.2 轴对称刚体表面接触单元库第32章在ABAQUS/Standard中定义空腔辐射32.1 定义空腔辐射32.1.1 空腔辐射。
GNU

echo "Linking... "
echo "Creating file $@..."
$(LD) -o $@ $(STARTUP) $^ $(LDFLAGS)
用gcc作为编译器和连接器的入口的好处是:它会传一些额外的参数给编 译器和连接器. 比如,通常程序会与标准C程序库相连接. 如果你用ld来连 接,必须传给ld 许多参数,象crt0.o,-lc等等. 因为这些东西并不是生成可执 行文件所必需的,因此这些信息不会内嵌在ld中. 如果你用gcc作为连接器,这 些选项就会自动被加上去.
*link: %{mbig-endian:-EB} -X
如果命令行中有形如-mbig-endian的参数,就传给连接器‘‘-EB -X’’的参数
*lib: %{!shared:%{g*:-lg} %{!p:%{!pg:-lc}}%{p:-lc_p}%{pg:-lc_p}}
连接的时候,会根据不同的选项,添加库libc或libc p等.
1
arm-elf-objdump -S a2.o
a1.o:
file format elf32-littlearm
Disassembly of section .text:
00000000 <main>: #include <stdio.h> #include "uart_ev4510.h"
void main (void) {
GNU compiler及binary utilities简介∗
戴雨文 2003年11月26日
1 各个部分的职能
通常为了把一个应用程序从源文件转变为可执行的二进制代码,需要以下三个 部分:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.map 的示例
Warning: No STACK segment Start Stop Length Name 00000H 00010H 0011H DSEG 00020H 0002FH 0010H CSEG Origin Group Program entry point at 0002:0000 Class
(连接目标程序)
Library-file 提供库的选项, 在汇编程序的初级阶段,我们并不需要。 默认扩展.LIB 默认情况下是不使用库。 用“+”和空格来分隔多个lib文件。
(连接目标文件) 例: ; 执行文件CAITEST.EXE, 不生成.MAP文 件和库文件
例:
把LINK生成的代码模块HELLO.OBJ的可运行文 件存放进TEST.EXE文件中 C > LINK
;provides for object module file ID ;provides for executable file ID ;Enter, not generate map file ;Enter, not use library
;use default stack
例2:
(连接目标程序)
显示错误提示消息时,不会生成目标代码文件。
Line number
Line number
格式: LINK obj-file …, exe-file [,map-file] [,library-file…] [;] 连接器LINK能实现多个模块的连接, 也能实现目标模块与库函数的连接, 最终生成可执行程序。 多个模块中应有一个是主模块。
例: HELLO.ASM 源程序转变成TEST.OBJ 文件.
ng ng
;; The assembled program is past
错误提示信息的格式:
(使用 MASM)
文件名(行号):错误:错误类型编号 错误解释
例:
ASM(25): Error 9 Symbol not defined BUFF
• “交叉引用”生成交叉引用文件,
可以在交叉引用列表中应用。默认 扩展名是.CRF。
.CRF文件对大型程序,相当有用。 从中,你可以知道那些指令引用那 些数据项。 *
*:
(使用MASM)
文件名可以与源文件名相同或者不同。 注意:
如果.OBJ, .LST 或者.CRF的文 件名与源文件名相同,那么,无需 重复命名。
连接目标程序
(连接目标程序)
• Obj-file 是由汇编器生成的目标文件 汇编器假定文件扩展名是.OBJ 用“+”号或者空格来分隔多个OBJ文件
• Exe-file是生成的.EXE 文件. 默认文件名是第一个目标文件名 默认的扩展名是 .EXE
(连接目标程序)
Map-file 是要生成的扩展名为.MAP的文件。 MAP文件指明LINK过程中产生的相关地 址信息,每个段的大小和所有错误信息。 一种典型的错误是定义堆栈段出错。 进入CON(控制台),命令连接器把map 文件的信息在屏幕中显示出来,就可以 立即查看到错误信息。
(步骤)
出错
设计 编辑
汇编的源文件(.ASM)
assemble
目标代码程序文件(.OBJ)
连接
可执行程序(.EXE) 调试 可用程序
使用MASM
汇编一个程序的通用格式 MASM [选项] 源[,目标] [,列表] [,交叉引用]
(使用MASM)
• 选项提供一些设置告警级别的方式。 这次实验中,用默认值就可以了。
2.5 汇编、连接和执行程序
上机环境 为运行汇编语言程序,要在磁盘 上建立以下文件: • MASM.EXE 或 ASM.EXE(汇 编程序) • LIKE.EXE (连接程序) • (调试程序)
汇编、连接和执行程序的步骤
• 汇编语言的符号指令被称为源程序 (.ASM文件).
• 用汇编器把源程序翻译成机器代码,生 成一个目标程序(obj文件)。 • 最后,使用连接器转换目标程序,生成 一个可执行模块(.exe文件)
LINK可以把一个以上的单独已被汇 编的模块组合成一个可执行程序。
C > LINK T1 +T2, TEST ;把T1.OBJ 和T2.OBJ 组合进TEST.EXE
运行程序
1) 如果.exe文件放在默认的硬盘上,可以 通过键入文件,通过加载器把文件加载 到内存中。 文件名.exe 或者 文件名 如果省略了键入文件的扩展名, 加载器会 假定它是.exe (或者 .com). 2) 如果在DEBUG下运行 并跟踪程序的运 行, 重点在下面, 包括 .exe 扩展: DEBUG 硬盘名: 文件名.exe
(使用MASM)
• “源”会识别源程序的名称,标文件, 默认扩展名是.OBJ
(使用MASM)
• 列表表示要生成的.LST文件, 此文件包含源代码和目标代码。 默认扩展名是.LST。
.LST文件的展示
Microsoft (R) Macro Assembler Version 5.00 4/15/4 Page 1-1 1 0000 DSEG SEGMENT 2 0000 48 4F 57 20 44 4F 20 MESSAGE DB 'HOW DO YOU DO.',0DH,0AH,24H 3 59 4F 55 20 44 4F 2E 4 0D 0A 24 5 0011 DSEG ENDS 6 0000 CSEG SEGMENT 7 ASSUME CS:CSEG,DS:DSEG 8 0000 B8 ---- R BEGIN: MOV AX,DSEG 9 0003 8E D8 MOV DS,AX 10 0005 BA 0000 R MOV DX,OFFSET MESSAGE 11 0008 B4 09 MOV AH,09 12 000A CD 21 INT 21H 13 000C B4 4C MOV AH,4CH 14 000E CD 21 INT 21H 15 0010 CSEG ENDS 16 END BEGIN