FANUC_0i中文标准梯图
FANUC_0i标准梯形图

1紧急停止56911第一页0i 标准梯形图203036第二页45运行选择信号51MODE57606264运行指示677375778285第三页879799106109111118第四页121123133135142145147第五页154157166174184第六页194204207210第七页215220223225232第八页239246253+X264-X第九页275+ Z286-Z 第十页297308319第十一页320345349第十二页352第十三页386第十四页420425第十五页430433435438444第十六页456487516519521530533535547第十八页549558561564第十九页571578585第二十页587593599605630646648650第二十二页652654660667674684694698702第二十四页705707709711713715717720第二十五页753第二十六页止电源接通继电器方式锁(软操作面板)号方式选择信号方式选择信号运行选择信号参考点选择信号自动运行指示存储器编辑指示手动数据输入指示运行指示参考点指示指示增量进给指示手轮进给指示。
FANUC_0i中文标准梯形图
1紧急停止56911第一页0i 标准梯形图203036第二页45运行选择信号51MODE57606264运行指示677375778285第三页879799106109111118第四页121123133135142145147第五页154157166174184第六页194204207210第七页215220223225232第八页239246253+X264-X第九页275+ Z286-Z 第十页297308319第十一页320345349第十二页352第十三页386第十四页420425第十五页430433435438444第十六页456487516519521530533535547第十八页549558561564第十九页571578585第二十页587593599605630646648650第二十二页652654660667674684694698702第二十四页705707709711713715717720第二十五页753第二十六页止电源接通继电器方式锁(软操作面板)号方式选择信号方式选择信号运行选择信号参考点选择信号自动运行指示存储器编辑指示手动数据输入指示运行指示参考点指示指示增量进给指示手轮进给指示。
FANUC中文标准梯图
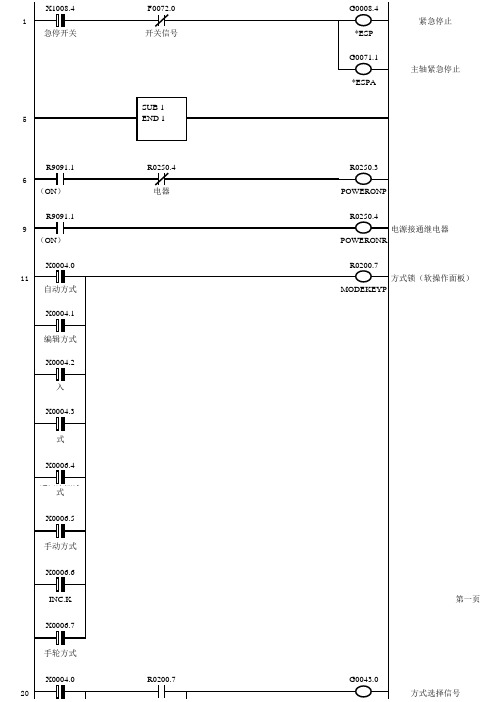
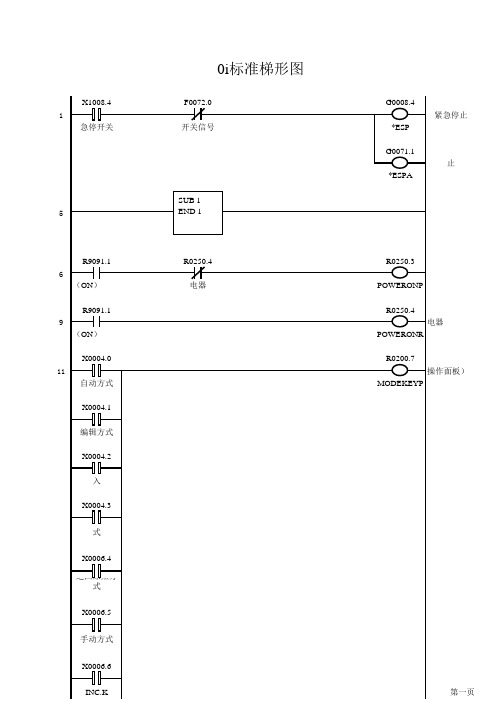
F0072.0 软操作面板开关信号
G0008.4 紧急停止 *ESP G0071.1 主轴紧急停止 *ESPA
5
SUB 1 END 1
R9091.1 6 系统定时器(ON) R9091.1 9 系统定时器(ON) X0004.0 11 自动方式 X0004.1 编辑方式 X0004.2 手动数据输入 X0004.3 DNC运行方式 X0006.4 返回原点方式 X0006.5 手动方式 X0006.6 INC.K X0006.7 手轮方式 X0004.0 20
R0250.4 电源接通继电器
R0250.3 POWERONP R0250.4 电源接通继电器 POWERONR R0200.7 方式锁(软操作面板) MODEKEYP
第一页
R0200.7
G0043.0 方式选择信号
自动方式 X0004.1 编辑方式 X0004.3 DNC运行方式 X0006.5 手动方式 X0006.4 返回原点方式 G0043.0
R0200.4 111 OPTP R0200.4 OPTP X0005.0 118 SRN.K
R0200.6 OPTM R0200.6 OPTM R0201.1 SRNR
R0200.6 OPTM Y0004.6 OPTSTP.L R0201.0 SRNP 第四页
X0005.0 121 SRN.K R0201.0 123 SRNP R0201.0 SRNP X0005.1 130 MLK.K X0005.1 133 MLK.K R0201.2 135 MLKP R0201.2 MLKP X0005.2 142 DRN.K X0005.2 145 DRN.K R0201.4 147 DRNP DRN G0046.7 DRNR MLK G0044.1 MLK R0201.5 G0044.1 MLKR SRN G0006.0 SRN R0201.3 G0006.0
FANUC(发那科)机器人PMC内部梯形图

FANUC机器人PMC内部梯形图PMC程序构成的要素基本命令功能命令PMC地址PMC程序与机器人程序之间的接口R、K领域与SDO的对应D领域与GO的对应PMC程序的系统控制F1000~F1255的功能G1000~G1255的功能PMC地址对应一览X0~X127←→SDI[1]~SDI[1024](通用数字输入信号)X1000~X1004←→UI[1]~UI[40](UOP输入信号)X1005~X1009←→WDI[1]~WDI[40](焊机输入信号)X1010~X1014←→WSTI[1]~WSTI[40](熔敷检测输入信号)X1015~X1019←→LDI[1]~LDI[40](激光焊机输入信号)X1020~X1024←→RDI[1]~RDI[40](机器人输入信号)X1025~X1026←→SI[1]~SI[16](操作盘输入信号)Y0~Y127←→SDO[1]~SDO[1024](通用数字输出信号)Y1000~Y1004←→UO[1]~UO[40](UOP输出信号)Y1005~Y1009←→WDO[1]~WDO[40](焊机输出信号)Y1010~Y1014←→WSTO[1]~WSTO[40](熔敷检测输出信号)Y1015~Y1019←→LDO[1]~LDO[40](激光焊机输出信号)Y1020~Y1024←→RDO[1]~RDO[40](机器人输出信号)Y1025~Y1026←→SO[1]~SO[16](操作盘输出信号)F0~F127←→GI[1]~GI[64](组输入信号)F128~F255←→AI[1]~AI[64](模拟信号输入)F1000~F1255←→(系统接口输入)G0~G127←→GO[1]~GO[64](组输出信号)G128~G255←→AO[1]~AO[64](模拟信号输出)G1000~G1255←→(作为与机器人控制装置的系统软件的接口使用)R0~R1499←→(通用内部继电器)R9000~R9117←→(PMC系统管理领域)K0~K19←→(保持型内部继电器)D0~D2999←→(数据表)T0~T79←→(存放功能命令TMR(SUB3)的定时器值的领域)C0~C79←→(存放功能命令CTR(SUB5)的预置值、累计值的领域)PMC程序内置PMC功能是使梯形语言记录的PMC程序,在机器人控制装置内部高速运行的功能。
发那科0i系统的原理框图和维修方法
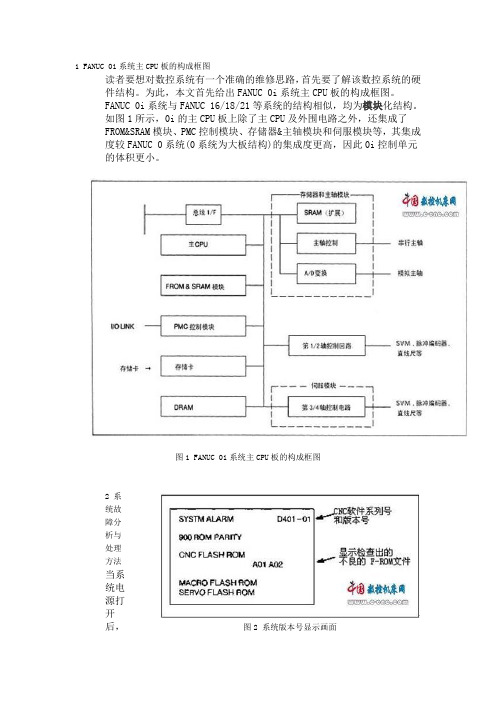
1 FANUC 0i系统主CPU板的构成框图读者要想对数控系统有一个准确的维修思路,首先要了解该数控系统的硬件结构。
为此,本文首先给出FANUC 0i系统主CPU板的构成框图。
FANUC 0i系统与FANUC 16/18/21等系统的结构相似,均为模块化结构。
如图1所示,0i的主CPU板上除了主CPU及外围电路之外,还集成了FROM&SRAM模块、PMC控制模块、存储器&主轴模块和伺服模块等,其集成度较FANUC 0系统(0系统为大板结构)的集成度更高,因此0i控制单元的体积更小。
图1 FANUC 0i系统主CPU板的构成框图2 系统故障分析与处理方法当系统电源打开后,图2 系统版本号显示画面如果电源正常,数控系统则会进入系统版本号显示画面(如图2所示),系统开始进行初始化。
如果系统出现硬件故障,显示屏上会出现900~973号报警提示用户。
下面介绍出现系统报警时的原因和处理方法。
1.900号报警(ROM奇偶校验错误)要点分析:系统中的FROM在系统初始化过程中都要进行奇偶校验。
当校验出错时,则发生FROM奇偶性报警,并指出不良的FROM文件。
原因和处理:主板上的FROM&SRAM模块或者主板不良。
更换主板。
2.910~911报警(DRAM奇偶校验错误)要点分析:在FANUC 0i数控系统中,DRAM的数据在读写过程中,具有奇偶校验检查电路,一旦出现写入的数据和读出的数据不符时,则会发生奇偶校验报警。
ALM910和ALM911分别为提示低字节和高字节的报警。
原因和处理:应考虑主板上安装的DRAM不良。
更换主板。
3.912~913报警(SRAM奇偶校验错误)要点分析:与DRAM不良一样。
ALM912和ALM913分别为提示低字节和高字节的报警。
原因和处理:(1)SRAM中存储的数据不良。
若每次接通电源,马上就发生报警,将电源关断,全清存储器(全清的操作方法是同时按住MDI面板上的RESET和DELET键,再接通电源)。
FANUC0i系统数控车床的编程与操作

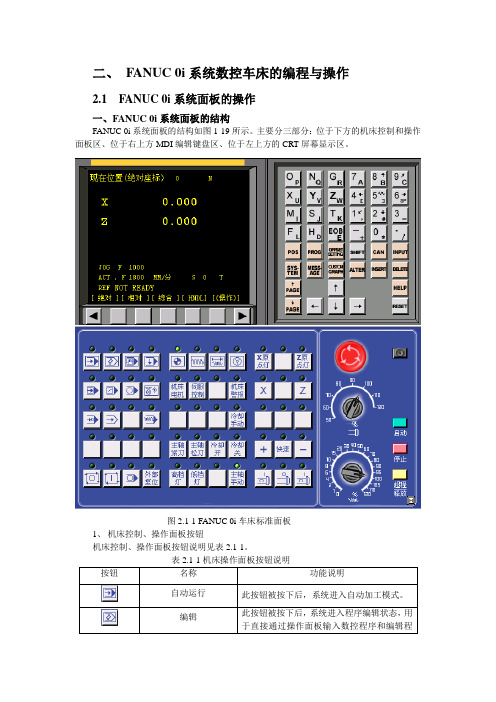
二、 FANUC 0i系统数控车床的编程与操作FANUC 0i系统面板的操作一、FANUC 0i系统面板的结构FANUC 0i系统面板的结构如图1-19所示。
主要分三部分:位于下方的机床控制和操作面板区、位于右上方MDI编辑键盘区、位于左上方的CRT屏幕显示区。
图 FANUC 0i车床标准面板1、机床控制、操作面板按钮机床控制、操作面板按钮说明见表。
按钮名称功能说明自动运行此按钮被按下后,系统进入自动加工模式。
编辑此按钮被按下后,系统进入程序编辑状态,用于直接通过操作面板输入数控程序和编辑程序。
MDI此按钮被按下后,系统进入MDI模式,手动输入并执行指令。
远程执行此按钮被按下后,系统进入远程执行模式即DNC模式,输入输出资料。
单节此按钮被按下后,运行程序时每次执行一条数控指令。
单节忽略此按钮被按下后,数控程序中的注释符号“/”有效。
选择性停止当此按钮按下后,“M01”代码有效。
机械锁定锁定机床。
试运行机床进入空运行状态。
进给保持程序运行暂停,在程序运行过程中,按下此按钮运行暂停。
按“循环启动”恢复运行。
循环启动程序运行开始;系统处于“自动运行”或“MDI”位置时按下有效,其余模式下使用无效。
循环停止程序运行停止,在数控程序运行中,按下此按钮停止程序运行。
回原点机床处于回零模式;机床必须首先执行回零操作,然后才可以运行。
手动机床处于手动模式,可以手动连续移动。
手动脉冲机床处于手轮控制模式。
手动脉冲机床处于手轮控制模式。
X轴选择按钮在手动状态下,按下该按钮则机床移动X轴。
Z轴选择按钮在手动状态下,按下该按钮则机床移动Z轴。
正方向移动按钮手动状态下,点击该按钮系统将向所选轴正向移动。
在回零状态时,点击该按钮将所选轴回零。
负方向移动按钮手动状态下,点击该按钮系统将向所选轴负向移动。
快速按钮按下该按钮,机床处于手动快速状态。
主轴倍率选择旋钮将光标移至此旋钮上后,通过点击鼠标的左键或右键来调节主轴旋转倍率。
FANUC0i系统的原理框图和维修方法综述
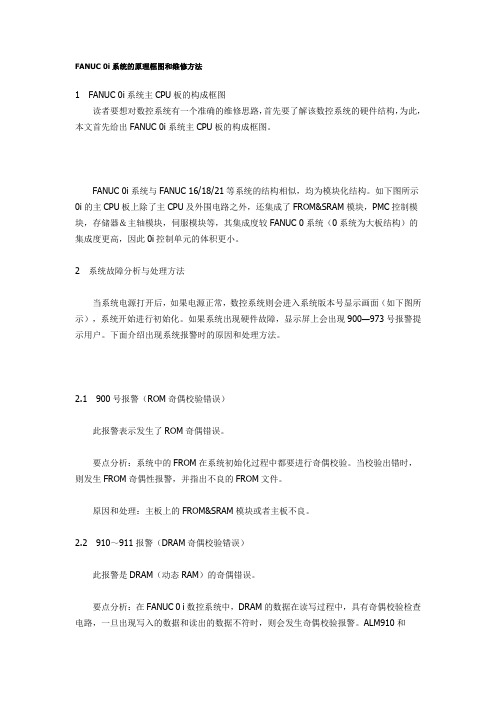
FANUC 0i系统的原理框图和维修方法1FANUC 0i系统主CPU板的构成框图读者要想对数控系统有一个准确的维修思路,首先要了解该数控系统的硬件结构,为此,本文首先给出FANUC 0i系统主CPU板的构成框图。
FANUC 0i系统与FANUC 16/18/21等系统的结构相似,均为模块化结构。
如下图所示0i的主CPU板上除了主CPU及外围电路之外,还集成了FROM&SRAM模块,PMC控制模块,存储器&主轴模块,伺服模块等,其集成度较FANUC 0系统(0系统为大板结构)的集成度更高,因此0i控制单元的体积更小。
2系统故障分析与处理方法当系统电源打开后,如果电源正常,数控系统则会进入系统版本号显示画面(如下图所示),系统开始进行初始化。
如果系统出现硬件故障,显示屏上会出现900—973号报警提示用户。
下面介绍出现系统报警时的原因和处理方法。
2.1900号报警(ROM奇偶校验错误)此报警表示发生了ROM奇偶错误。
要点分析:系统中的FROM在系统初始化过程中都要进行奇偶校验。
当校验出错时,则发生FROM奇偶性报警,并指出不良的FROM文件。
原因和处理:主板上的FROM&SRAM模块或者主板不良。
2.2910~911报警(DRAM奇偶校验错误)此报警是DRAM(动态RAM)的奇偶错误。
要点分析:在FANUC 0 i数控系统中,DRAM的数据在读写过程中,具有奇偶校验检查电路,一旦出现写入的数据和读出的数据不符时,则会发生奇偶校验报警。
ALM910和ALM911分别提示低字节和高字节的报警。
原因和处理:应考虑主板上安装的DRAM不良。
更换主板。
2.3912~913报警(SRAM奇偶校验错误)此报警是SRAM(静态RAM)的奇偶错误。
要点分析:与DRAM一样,SRAM中的数据在读写过程中,也具有奇偶校验检查电路,一旦出现写入的数据和读出的数据不符时,则会发生奇偶校验报警。
ALM912和ALM913分别提示低字节和高字节的报警。
FANUC0i系统数控车床的编程与操作.
二、FANUC 0i系统数控车床的编程与操作2.1 FANUC 0i系统面板的操作一、FANUC 0i系统面板的结构FANUC 0i系统面板的结构如图1-19所示。
主要分三部分:位于下方的机床控制和操作面板区、位于右上方MDI编辑键盘区、位于左上方的CRT屏幕显示区。
图2.1-1 FANUC 0i车床标准面板1、机床控制、操作面板按钮机床控制、操作面板按钮说明见表2.1-1。
钮运行暂停。
按“循环启动”恢复运行。
2、MDI编辑键盘区MDI键盘上各个键的功能见表2.1-2。
软键实现左侧中显示内容的向上翻页;软键实现左软键实现光标的向上移动;软键实现光标的向下移动;软键实现光标的向左移动;软键实实现字符的输入,点击键后再点击字符键,将输入右下角的点击将在点击软键后再点击将在光标所处位置处输入键中的“点击软键将在光标所在位置输入点击软键后再点击将在光标所在位置处输入3、CRT屏幕显示区CRT屏幕显示区显示了机床位置界面、程序管理界面、设置参数界面等。
⑴机床位置界面在手动或手轮方式下,点击进入坐标位置界面。
点击菜单软键[绝对]、菜单软键[相对]、菜单软键[综合],对应CRT界面将对应相对坐标(如图2.1-2-a)、绝对坐标(如图2.1-2-b)、和综合坐标(如图2.1-2-c )。
a相对坐标界面b绝对坐标界面c综合坐标界面图2.1-2机床位置界面⑵程序管理界面a 显示程序列表b 显示当前程序图2.1-3 程序管理界面在编辑方式下点击进入程序管理界面,点击菜单软键[LIB],将列出系统中所有的程序(如图2.1-3-a所示),在所列出的程序列表中选择某一程序名,点击将显示该程序(如图2.1-3-b所示)。
⑶设置参数车床刀具补偿参数车床的刀具补偿包括刀具的磨损量补偿参数和形状补偿参数,两者之和构成车刀偏置量补偿参数。
输入刀具摩耗量补偿参数:刀具使用一段时间后磨损,会使产品尺寸产生误差,因此需要对刀具设定磨损量补偿。
最新FANUC0i系统

电机轴上装有脉冲编码器,每转发出65 536个 脉冲(经电路倍频),用做位置反馈和速度反馈。这 种位置反馈,是间接测量工作台的直线位移,所以 称为半闭环伺服系统。但是,只要设定相应的参 数,BEIJING-FANUC 0系统可以使用直线光栅尺, 使系统接成全闭环。除此之外,还可接成双位置 反馈,即同时具有上述2个闭环。这样,既可以提高 系统的稳定性,还可以提高系统的快速性和加工 精度。
主轴控制用单独的CPU控制,处理器为TMS320。从CNC单元输出的控制指令用一条光缆送 到主轴的控制单元,数据为串行传送,因此可靠 性比较高。
RS-232C口及数据通讯
BEIJING-FANUC 0系统有2个串口(RS-232C), 分4个通道,用于系统与外部设备的数据交换。 交换的数据包括:系统及机床的设定参数、PMC 参数、零件加工程序、刀具补偿值、设定的工件 坐标系、丝杠的螺补值等。与计算机相连时,计 算机内必须装有数据传送软件。最快的传送速率 为9600 bps。 除上述的信息交换外,利用串行通讯还可实现下 列方式的在线加工与机床的DNC管理:
进给伺服单元的控制用前述的轴控制板,该板
输出控制指令信号到功率放大器。功率放大器为 模块化结构,分为整流模块和逆变模块,使用IPM 元件。
LSI是专用位置控制大规模集成电路芯片。 ROM中存储的控制程序主要有同步电机的快速响 应矢量控制、IP调节器、速度和位置的反馈控制、 前馈和提前前馈控制和状态观测器。此外,还有许 多非线性补偿与控制,如单脉冲抑制、超调抑制、
该功能可实现数据块的传送,有2种工作方式: ①计算机存储的加工程序是通常的加工代码 指令方式。缓冲器接受后变为2进制,然后送到 CNC执行。 ②计算机存储的加工程序是按2进制编制的。 缓冲器收到后不经转换即送往CNC执行。这2种 方式都比纸带方式的加工速度快,数据传送速率 最快为77900 bps。最快加工速度为15 m/s,电缆 最长可达100 m(无调制解调器时)。
FANUC_0i中文标准梯图

1紧急停止56911第一页0i 标准梯形图203036第二页45运行选择信号51MODE57606264运行指示677375778285第三页879799106109111118第四页121123133135142145147第五页154157166174184第六页194204207210第七页215220223225232第八页239246253+X264-X第九页275+ Z286-Z 第十页297308319第十一页320345349第十二页352第十三页386第十四页420425第十五页430433435438444第十六页456487516519521530533535547第十八页549558561564第十九页571578585第二十页587593599605630646648650第二十二页652654660667674684694698702第二十四页705707709711713715717720第二十五页753第二十六页止电源接通继电器方式锁(软操作面板)号方式选择信号方式选择信号运行选择信号参考点选择信号自动运行指示存储器编辑指示手动数据输入指示运行指示参考点指示指示增量进给指示手轮进给指示。
03_第三章 FANUC 0i控制面板操作简介
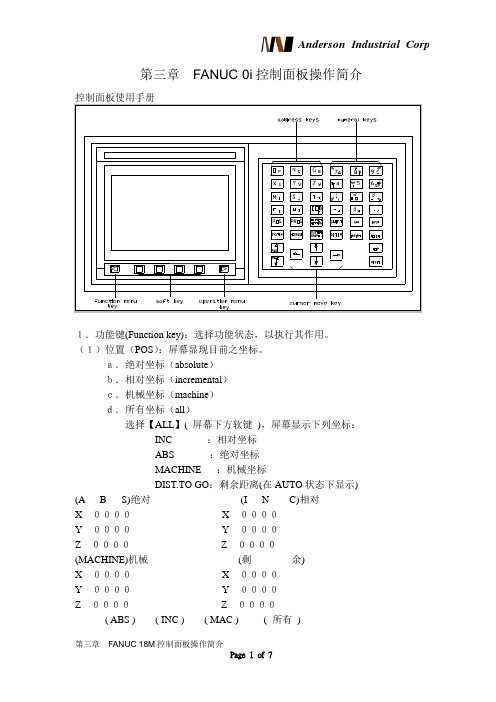
第三章FANUC 0i控制面板操作简介控制面板使用手册1.功能键(Function key):选择功能状态,以执行其作用。
(1)位置(POS):屏幕显现目前之坐标。
a.绝对坐标(absolute)b.相对坐标(incremental)c.机械坐标(machine)d.所有坐标(all)选择【ALL】( 屏幕下方软键),屏幕显示下列坐标:INC :相对坐标ABS:绝对坐标MACHINE :机械坐标DIST.TO GO:剩余距离(在AUTO状态下显示) (A B S)绝对(I N C)相对X0000X 0000Y0000Y0000Z0000Z0000(MACHINE)机械(剩余)X0000X0000Y0000Y0000Z0000Z0000( ABS ) ( INC ) ( MAC ) ( 所有)(2)程序(PRGRM):显现程序状态之内容,若配合控制器的功能显视的划就有所不同。
a.在编辑状态(EDIT)下→编写或修改程序内容。
b.在执行状态(MEMORY)下→执行中程序之内容。
(3)补正(OFFSET SETTING):显现刀具(或刀长)之补正位区。
按【OFFSET SETTING】键,共有32个地址供补正值使用输入或修改补正值。
例:H03 -6.000→20.000将光标移至003输入20.(在屏幕下方显示)按【INPUT】键,H03之值会变成20.000号码:0010000.000090000.000020000.000100000.000030020.00.......0080000.000160000.00号码:0170000.000200000.000180000.000210000.00........00190000.000320000.00(4)参数(SYSTEM):此参数为机械本身的纟统设定状态,每一个设定去均有不同的性质,如经更改错误将使得机械执行时产生错误,严重会损机械本身,故一般请勿动用。
破解FANUC 系统0i控制梯形图PMC加密程序的一点方法
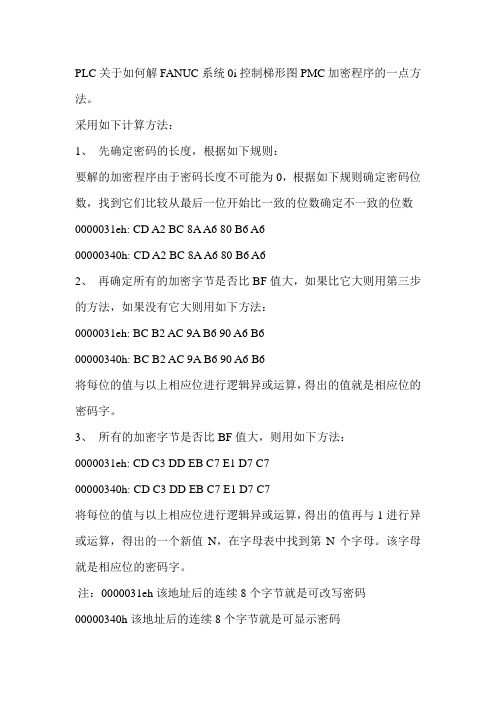
PLC关于如何解FANUC 系统0i控制梯形图PMC加密程序的一点方法。
采用如下计算方法:1、先确定密码的长度,根据如下规则:要解的加密程序由于密码长度不可能为0,根据如下规则确定密码位数,找到它们比较从最后一位开始比一致的位数确定不一致的位数0000031eh: CD A2 BC 8A A6 80 B6 A600000340h: CD A2 BC 8A A6 80 B6 A62、再确定所有的加密字节是否比BF值大,如果比它大则用第三步的方法,如果没有它大则用如下方法:0000031eh: BC B2 AC 9A B6 90 A6 B600000340h: BC B2 AC 9A B6 90 A6 B6将每位的值与以上相应位进行逻辑异或运算,得出的值就是相应位的密码字。
3、所有的加密字节是否比BF值大,则用如下方法:0000031eh: CD C3 DD EB C7 E1 D7 C700000340h: CD C3 DD EB C7 E1 D7 C7将每位的值与以上相应位进行逻辑异或运算,得出的值再与1进行异或运算,得出的一个新值N,在字母表中找到第N个字母。
该字母就是相应位的密码字。
注:0000031eh该地址后的连续8个字节就是可改写密码00000340h该地址后的连续8个字节就是可显示密码说明:1、以上方法仅供参考。
2、以上方法仅供为提高自己能力的人使用。
3、如果你不幸,没能解出你要的密码,请保持冷静。
勿怪该规则的提供者。
4、请注意原梯形图的知识产权,毕竟是别人的劳动成果。
不要用以上规则做不正当的事。
5、如果你从该规则找到更方便的方法,别忘了告诉大家,也方便一下别人。
6、请保持该文件的完整性。
7、如要探讨请和REBOSUN联系QQ:23782629 E_mail:ilovejob@8、附一些密码和已加密字。
NO PASSWORD&NO SET0000031eh: 78 D1 C0 8B A1 19 00 B100000340h: F8 00 C0 8B A1 19 00 02兴平HA VEP123HA VEPLXY0000031eh: C0 DA C5 8A A6 80 B6 A600000340h: BD B0 AF 8A A6 80 B6 A6 6A 20NO PASSWORD& have PASSWORD SET 0000031eh: AB DD 86 F7 2E B1 F7 24 00000340h: 4B 2A DF F2 24 6F 43 E3 HA VE P9*******HA VE P9*******0000031eh: B5 BB A5 93 BF 99 AF BF 00000340h: B5 BB A5 93 BF 99 AF BF HA VEP00000000HA VEP000000000000031eh: BC B2 AC 9A B6 90 A6 B6 00000340h: BC B2 AC 9A B6 90 A6 B6 HA VEPAAAAAAAAHA VEPAAAAAAAA0000031eh: CD C3 DD EB C7 E1 D7 C7 00000340h: CD C3 DD EB C7 E1 D7 C7 HavePZZZZZZZZHA VEPZZZZZZZZ0000031eh: D6 D8 C6 F0 DC FA CC DC 00000340h: D6 D8 C6 F0 DC FA CC DC HA VEPBBBBBBBBHA VEPBBBBBBBB0000031eh: CE C0 DE E8 C4 E2 D4 C4HA VEPABCDEFG0000031eh: CD C0 DF EE C3 E6 D1 A6 00000340h: CD C0 DF EE C3 E6 D1 A6 HA VEP12345678HA VEP123456780000031eh: BD B0 AF 9E B3 96 A1 BE 00000340h: BD B0 AF 9E B3 96 A1 BE HA VEP098765432HA VEP0987654320000031eh: BC BB A4 9D B0 95 A2 B5 00000340h: BC BB A4 9D B0 95 A2 B5 HA VEP123HA VEP4560000031eh: B8 B7 AA 8A A6 80 B6 A6 00000340h: BD B0 AF 8A A6 80 B6 A6 HA VEP0HA VEP00000031eh: BC A2 BC 8A A6 80 B6 A6 00000340h: BC A2 BC 8A A6 80 B6 A6 HA VEP0HA VENP00000340h: BC A2 BC 8A A6 80 B6 A6HA VENPHA VEP00000031eh: BC A2 BC 8A A6 80 B6 A600000340h: FA 36 90 11 61 A5 88 A0HA VEPAHA VEPA0000031eh: CD A2 BC 8A A6 80 B6 A600000340h: CD A2 BC 8A A6 80 B6 A6你好,我用你的方法已经可以解除FANUC PMC SB7的密码,很好用。
0与0I参数比较

0系列
0I系列
代码
说明
63.3
5200.1=1
VGR
在刚性攻牙模式中,主轴和POSITION CODER任意齿数比使用
76.3
5200.0=0
G48
刚性攻牙程式语法
256
5210
0 H29
刚性攻牙M码
633-65
5221-23
1~32767
刚性攻牙时主轴侧齿数
666-68
5231-33
1~32767
619
5301
主轴IN-POSITION宽度
620
5310
攻牙轴移动中位置偏差量限制
621
5311
主轴移动中位置偏差限制
622
5312
攻牙轴停止间位置偏差量限制
623
5313
主轴停止间位置偏差量限制
255
5321
主轴背隙
6544-45
4044-45
主轴在伺服马达模式时速度比例增益
6552-53
4052-53
747--750
1323
各轴第二行程负方向限制
进给率
0系列
0I系列
代码
说明
518--521
1420
各轴快速移动进给率
1410
DRY RUN
527
1422
所有轴切削最大进给率
1430
各轴切削最大进给率
1431
LOOK—AHEAD控制中所有轴最大切削进给率
1432
LOOK—AHEAD控制中各轴最大切削进给率
ASI
传输码是EIA或ISO/ASCII
38.4—5
112
传输设定方式(RS232=0.PPR=6)
FANUC系统梯形图实例

FANUC系统梯形图实例用途:针对中小厂家梯形图实例ID号:dwxc2009日期:2009年11月文件使用的限制以及注意事项等文件版本更新的纪录修订日期 版本号 文件名称 修订内容 修订人 2009年11月 1.0 FANUC系统梯形图实例 首次发布 王政锋等目录1. FANUC IO Link连接 (1)1.1 概述 (1)1.2 0i-D/Mate-D连接 (1)1.3 0i用I/O单元的连接 (3)1.3.1 电源连接 (4)1.3.2 插头管脚分配 (5)1.3.3 DI/DO的连接 (6)1.3.4 DI信号要求和DO用外部电源 (15)2.PMC种类和参数设定 (16)2.1 PMC种类 (16)2.2 PMC参数的设定 (16)2.2.1 PMC参数的输入条件 (16)2.2.2 定时器设定画面 (17)2.2.3 计数器设定画面 (20)2.2.4 保持型继电器 (21)2.2.5 数据表 (25)3. 内置编程器的使用 (31)3.1 内置编程器的启动 (31)3.2 PMC数据的输入输出 (32)3.3 标题信息的输入 (34)3.4 系统参数设定 (35)3.5 I/O LINK模块分配 (36)3.6 地址符号和注释的设定 (38)3.6.1 符号和注释的显示和编辑 (38)3.6.2 梯形图画面和状态画面的符号与注释的显示 (40)3.7 报警信息的设定 (41)3.7.1 介绍如何输入设定CNC画面所显示的报警信息和操作信息的文字例 (41)3.8 梯形图的编辑 (43)3.8.1 编辑网格的演示画面 (46)3.8.2 程序的编辑方法 (48)3.8.3 CODB转换指令的数据表的输入 (52)3.8.4 地址的变更 (53)3.8.5 网格的删除 (53)3.8.6 程序的复制和移动 (54)3.8.8 地址图的显示 (56)3.8.9 程序单元的删除 (57)3.8.10 双重线圈检查 (58)3.8.11 梯形图的启动 (59)4.机床操作面板 (60)4.1 机床操作面板 (60)4.1.1 CRT/MDI面板 (60)4.1.2 机床操作面板 (61)4.2 市场常见机床操作面板介绍 (61)4.2.1 滕州山森面板 (61)4.2.2 姜堰赛扬面板 (62)5.经济型数控车床标准梯图参考 (63)5.1 中间地址定义和K参数含义 (63)5.5.1 中间地址定义 (63)5.1.2 K参数含义 (65)5.2 PMC信号地址简述 (65)5.3 数控车床标准梯图参考 (66)5.3.1 急停及超程报警 (66)5.3.2 操作方式的切换 (66)5.3.3 运行方式处理 (69)5.3.4 外围辅助动作 (71)5.3.5 各轴手动和手轮方式运行 (73)5.3.6 主轴运行和主轴倍率 (80)5.3.7 M代码和完成信号 (86)5.3.8 四工位刀架 (87)5.3.9 指示灯和报警处理 (94)5.4 滕州山森CNC-0IMA车床面板 (95)5.4.1 实际使用IO地址定义 (95)5.4.2 X,Y信号替换 (97)5.5 赛扬四代韩氏车床面板 (105)5.5.1 实际使用IO地址定义 (105)6.经济型数控铣床标准梯图 (107)6.1 操作面板中间地址定义和K参数含义 (107)6.1.1 操作面板中间地址定义 (107)6.1.2 K参数含义 (109)6.2.1 急停及硬超程报警 (109)6.2.2 操作方式的切换 (110)6.2.3 运行方式处理 (114)6.2.4 外围辅助动作处理 (117)6.2.5 各轴手动和手轮运行 (118)6.2.6 主轴运行和主轴倍率处理 (126)6.2.7 指示灯和机床报警处理 (134)6.3 滕州山森NCBK-8MCH铣床操作面板 (135)6.3.1 实际使用IO地址定义 (135)6.3.2 X,Y信号地址替换 (137)1. FANUC IO Link连接1.1 概述FANUC I/O Link是一个串行接口,将CNC,单元控制器,分布式I/O,机床操作面板或Power Mate连接起来,并在各设备间高速传送I/O信号(位数据)。
FANUC-0i数控系统操作面板和手动操作

F A N U C-0i数控系统操作面板和手动操作(总3页)本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.MarchFANUC-0i数控系统操作面板和手动操作面板如图所示(1)MODESELECT(方式MDI操作画页选择开关):选择操作方式的开关,有以下几种方式。
①编辑(EDIT)编缉方式②自动(MEM或AUTO)存储运转方式(或称自动加工)③MDIMDI手动数据输入方式④手动(JOG)手动连续进给方式⑤手轮手动连续进给方式⑥快速快速进给方式⑦回零(REF或ZRN)手动返回参考点方式⑧DNC联机通信、计算机直接加工控制方式⑨示教示教方式操作步骤:1.手动回参考点手动回机床原点(参考点):将手动操作面板上的操作方式(MODE)开关置“(回零)”档位,先将手动轴选择为Z轴,再按下“+”移动方向键,则Z轴将向参考点方向移动,一直至回零指示灯亮。
然后分别选择Y、X轴进行同样的操作。
2.工作台的手动调整工作台拖板的手动调整是采用方向按键通过产生触发脉冲的形式或使用手轮通过产生手摇脉冲的方式来实施的。
和手柄的粗调、微调一样,其手动调整也有两种方式。
(1)粗调:置操作方式开关为“JOG(手动连续进给)”方式档。
先选择要移动的轴,再按轴移动方向按钮,则刀具主轴相对于工作台向相应的方向连续移动,移动速度受“JOGFEEDRATE”(快速倍率)旋钮的控制,移动距离受按压轴方向选择钮的时间的控制,即按即动,即松即停。
采用该方式无法进行精确的尺寸调整,当移动量大时可采用此方法。
(2)微调:本机床系统的微调需使用手轮来操作。
将方式开关置为“手轮”方式档。
再在手轮中选择移动轴和进给增量,按“逆正顺负”方向旋动手轮手柄,则刀具主轴相对于工作台向相应的方向移动,移动距离视进给增量档值和手轮刻度而定,手轮旋转360º,相当于100个刻度的对应值。
FANUC0i系统-精选文档

进给伺服单元的控制用前述的轴控制板,该板 输出控制指令信号到功率放大器。功率放大器为 模块化结构,分为整流模块和逆变模块,使用IPM 元件。 LSI是专用位置控制大规模集成电路芯片。 ROM中存储的控制程序主要有同步电机的快速响 应矢量控制、IP调节器、速度和位置的反馈控制、 前馈和提前前馈控制和状态观测器。此外,还有许 多非线性补偿与控制,如单脉冲抑制、超调抑制、 反向间隙加速补偿、机床的速度反馈等。还有运 行过程的监测及保护。由于有这些控制,使得 BEIJING-FANUC 0系统运行可靠、快速、平稳、 精度高。
电机轴上装有脉冲编码器,每转发出65 536个 脉冲(经电路倍频),用做位置反馈和速度反馈。这 种位置反馈,是间接测量工作台的直线位移,所以 称为半闭环伺服系统。但是,只要设定相应的参 数,BEIJING-FANUC 0系统可以使用直线光栅尺, 使系统接成全闭环。除此之外,还可接成双位置 反馈,即同时具有上述2个闭环。这样,既可以提高 系统的稳定性,还可以提高系统的快速性和加工 精度。
(3)I/O板 该板是CNC单元与机床强电柜的接口。 接收或输出24 V直流信号,由PMC实施输入/输出控制。 I/O点数可根据机床的复杂程度选择。标准配置为104 个输入点,72个输出点。 (4)进给伺服控制板 BEIJING-FANUC 0系统全部 用数字式交流伺服控制。其控制板装在CNC单元内,插 在主板上,即CNC单元与进给伺服为一体化设计。伺 服板上有2个CPU(TMS320),用于伺服的数字控制。每 个CPU控制2个轴,一块板可控制4个轴。该板接受主 CPU分配的伺服控制指令,输出6个相位各差60°的脉 宽调制信号(每轴),加于各轴的伺服驱动的功率放大器 上。 0-D系统为4轴(最大配置)控制,4轴联动。只用一块伺服 板。0-C最多可控制6个轴,控制6个轴时需用2块板。
FANUC梯图输入方法

J24/JW24梯形图CARD——机床的输入方法(2006年6月30日)MDI状态下,按下ESP按钮(参数写保护打开与否没有关系)。
1、插入CARD—依次按下以下按键出现以下画面:DEVICE =M-CARD 光标当前位置FUNCTION =WRITEDATA KIND =LADDERFILE No. =@PMC-RA.000[EXEC] [CANCEL] [M-CARD] [F-ROM] [FDCAS]把光标下移一行:DEVICE =M-CARDFUNCTION =WRITE ←光标移到此行※DATA KIND =LADDERFILE No. =@PMC-RA.000在光标移动到FUNCTION一行时,下面的软键功能变成以下:[EXEC] [CANCEL] [WRITE] [READ] [COMPAR]↑押下2、此时出现以下画面:DEVICE =M-CARDFUNCTION =READDATA KIND =FILE No. =1 光标当前位置[EXEC] [CANCEL] [ ] [ ] [ ]↑押下3、出现以下提示:ARE YOU SURE YOU WANT TO READ THIS FILE?[YES] [NO] [ ] [ ] [ ]↑按下[YES]键。
4、再次出现以下画面:DEVICE =M-CARDFUNCTION =READ 光标当前位置DATA KIND =FILE No. =1[EXEC] [CANCEL] [ ] [ ] [ ]把光标上移一行:DEVICE =M-CARD ←光标移到此行※FUNCTION =READDATA KIND =FILE No. =1在光标移动到DEVICE一行时,下面的软键功能变成以下:[EXEC] [CANCEL] [M-CARD] [F-ROM] [FDCAS]↑押下5、出现以画面:DEVICE =F-ROMFUNCTION =WRITE ←光标移动到此,自动变成“WRITE”DATA KIND =LADDER[EXEC] [CANCEL] [WRITE] [READ] [COMPAR]↑押下6、向上翻页,找到[RUN]键,按下后出面以下画面:ARE YOU SURE YOU WANT TO RUN THIS PROGRAM?[YES] [NO] [ ] [ ] [ ]↑押下7、画面出现“COMPLETE。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
紧急停止
5
6
9
11
第一页
0i 标准梯形图
20
30
36
第二页
45
运行选择信号
51
MODE
57
60
62
64
运行指示
67
73
75
77
82
85
第三页
87
97
99
106
109
111
118
第四页121
123
133
135
142
145
147
第五页154
157
166
174
184
第六页194
204
207
210
第七页
215
220
223
225
232
第八页
239
246
253
+X
264
-X
第九页
275
+ Z
286
-Z 第十页
297
308
319
第十一页
320
345
349
第十二页
352
第十三页
386
第十四页420
425
第十五页430
433
435
438
444
第十六页456
487
516
519
521
530
533
535
547
第十八页549
558
561
564
第十九页
571578585
第二十页587
593
599
605
630
646
648
650
第二十二页
652
654
660
667
674
684
694
698
702
第二十四页
705
707
709
711
713
715
717
720
第二十五页
753
第二十六页
止
电源接通继电器
方式锁(软操作面板)
号
方式选择信号方式选择信号
运行选择信号
参考点选择信号
自动运行指示
存储器编辑指示
手动数据输入指示
运行指示
参考点指示
指示增量进给指示手轮进给指示。