声纳浮标与磁探联合搜潜仿真研究
LOFAR浮标定位算法的仿真研究
( 西北工业大学 航海学院 , 陕西 西安
7 1 0 0 7 2 )
【 摘
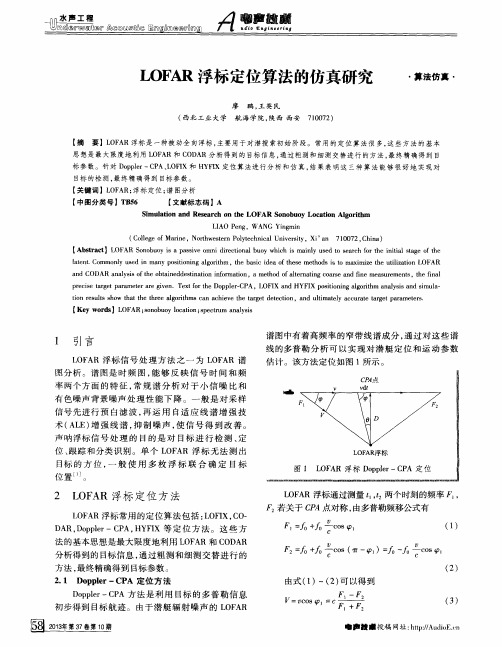
要】 L O F A R浮标是 一种被动全 向浮标 , 主要用 于对潜搜 索初始 阶段。常用 的定位 算法很 多, 这些方 法的基本
思想是最大 限度地利用 L O F A R和 C O D A R分析得 到的 目标信 息, 通过粗测和细测交替进 行的方法, 最终精确得到 目 Байду номын сангаас标参数。针对 D o p p l e r —C P A、 L O F I X和 H Y F I X定位算法进 行分析和仿 真 , 结果表 明这 三种 算法能够 很好地 实现对
【 A b s t r a c t 】L O F A R S o n o b u o y i s a p a s s i v e o mn i d i r e c t i o n a l b u o y w h i c h i s m a i n l y u s e d t o s e a r c h f o r t h e i n i t i a l s t a g e o f t h e
a n d CODAR a n a l y s i s o f t he o bt a i n e d de s t i n a t i o n i nf o r ma t i o n,a me t h o d o f a l t e r n a t i n g c o a r s e a n d ine f me a s u r e me n t s ,t h e in f a l p r e c i s e t a r g e t pa r a me t e r a r e g i v e n.Te x t f o r t h e Do p pl e r — CPA ,L OFI X a nd HYFI X p o s i t i o n i n g a l g o it r h m a n a l y s i s a n d s i mu l a —
被动声纳浮标目标运动分析及其仿真计算
(. a yAr met e at n, e g10 4 , hn ; 1 N v ma n p r D metB in 0 8 C ia j i 1 2 J n s u o t n R s ac n t ue f S C, in u g n 2 0 6 C ia . i g uA tmai e e rh I s tt o I L a y n a g2 2 0 , h n ) a o i C Ab ta t T eT src: h MA( ag t o e n n lssb sdo as esn r u yh sbe tde codn ote T re v me tA ayi ae np si o a・ o a e ns i ac rigt h M ) v b u d
维普资讯
第2 8卷
第 6期
指挥控制 与仿 真
C mma d Co t l S mu ai n o n n r & i lt o o
V 1 8 No6 02 l. .
De . 0 c20 6
20 0 6年 l 2月
文 章 编 号 : l 7 —8 92 0 )60 3 .4 6 33 l(0 60 .0 10
Y) 为第i 个
声 纳浮标位 置 。显然 , 在被 动定 向声纳 浮标量测 时 ,
标 定位 计算 的文章 发表也不 多【 。 l 】
利 用声 纳 浮标对水 下潜艇 进行 定位 是直 升机 反 潜的 主要 手段 之一 。由于浮标 靠 直升机 来投放 ,受 直升 机悬停 、风 、人 工驾驶 等 因素 的作 用 ,直升 机 本身 定位难 以准确 ,因而投 放定 向声 纳浮标 的位 置
潜艇跟踪过程中声呐浮标的作战使用
的思 路是 : 敌潜 艇 可能 的航 向前方 ,沿 垂直 于 敌 潜 在
艇 航 路 的方 向 上 布设 声 呐 浮 标 障 ,如 图 3所 示 。 浮 标 障 中 , 邻 浮 标 之 间 的距 离 通 常 为 1 0~15 d 相 . . d(
为浮标 发 现潜 艇 的距 离 ) 。
标 障 。如果相 邻 2道 浮 标 障 的 浮标 均 未 发 出 发现 目
声 波 的电子 设备 。基 本组 成 有 3部分 : 声 系统 、 水 无
收 稿 日期 : 0 1 0 1 2 1 - 9— 9;修 回 日期 : 0 1 1 1 2 1 —1 — 7
2 潜 艇 跟 踪 过 程 中声 呐 浮标 的使 用 方 法
在利 用声 呐 浮 标 系统 进 行 潜艇 跟踪 时 ,最 基 本
连续 保持 目标 接触 法 的使 用时 机 是 : 机 ( 升 飞 直 机 ) 听 浮标工 作 的时 间 、飞机 飞至发 出信 号 浮标 有 监
图 2 浮 标 信 息 接 收 系 统 基 本 组 成 方 框 图
Fi . Ba i o g2 sc c mpo e to n o mai n r c c ig s se n n fi f r to e e vn y t m
线 电通信 系 统和浮 标信 息接 收 系统 。 无 线 电声呐 浮标 的 水 声 系统 是 其 获 取 有 关 潜 艇 或 其他 信息 的 主要 组 成 部 分 ,是 浮 标 利 用 声 波 进 行 水 下探 测 的电 子设 备 。无 线 电通 信 系 统 主 要 任 务 是 根据 声呐 浮标 系 统工 作 的特 点 ,将 水 声 系 统 探 测 到 的信 息 、 身相 关 的信 息 发送 给 配 合 兵 力 ,其 基 本 本
吊放声纳与声纳浮标在应召搜潜中的联合运用

从式(1) 一 3)可以看出: 吊放声纳应召搜索的概 (
率与兀、 , 。t,. 有很大关系。 此, 因 如何有效提高反潜
直升机的反应时间和改进搜索方法进而减小搜索时 间是吊放声纳在应召搜索中的关键问题。
重复上述动作。一般认为,相邻悬停点之间距离取 1.25 一1.6 倍声纳战术作用距离, 可保证最优覆盖面 积和最佳发现概率。
2 声纳浮标在应召反潜中的运用
2.1 声纳浮标反潜过程
声纳浮标具有体积小、搜索面积大 、 效率高 、
1.2 搜索概率的计算
采取不同的搜索方法,吊放声纳的应召搜索概
收稿 日期 20 06-0 6- 11 作者简介 张晓利 ( 198卜 ),男,硕士生.
隐蔽性好、 不受海区限制等优点1 41 3. 。尤其是远距
发现 目 标到反潜机到达发现潜艇点的延迟时间; V m 为潜艇航行速度。
反潜直升机到达搜索海域后, 按预定搜索航线 飞行, 在悬停点下降到离海面 25m 左右的高度迎风 悬停 ,放下换能器,边放边观察。一般先被动 ( 噪 声方式 ), 再主动 ( 回声方式 )。 如果发现可疑信号, 就要进一步探测 ; 若没有发现 目 标,则收起水下分
张晓利 ’ ,陈建勇2
( 1. 海军航空工程学院研究生管理大队; 2. 海军航空工程学院电子信息工程系,山东烟台,264001) 摘 要: 在介绍吊放声纳与声纳浮标各自 在应召搜潜中的运用的基础上,针对两者在单独使用上的不足提出了
一种新的搜潜策略, 并从理论上说明了这种新的搜潜策略具有一定的优势。
关键词: 航空反潜; 吊放声纳; 声纳浮标
都 , ! 食汪一 " 一, 份
、 ,、 、、
潜艇机动规避主动定向声纳浮标方法研究
潜艇机动规避主动定向声纳浮标方法研究一、引言- 研究背景和意义- 国内外研究现状- 研究内容和目的二、潜艇机动规避声纳浮标的理论基础- 潜艇机动规避的基本原理和方法- 主动定向声纳浮标的工作原理和特点- 潜艇机动规避声纳浮标的机理和过程三、潜艇机动规避声纳浮标的技术方案- 常规机动规避方法的不足和局限性- 基于声纳浮标的机动规避技术方案的设计思路与原理- 基于声纳浮标的机动规避技术方案的实现步骤和方法四、潜艇机动规避声纳浮标的仿真验证- 仿真实验的设计、组成和实现- 仿真实验数据的分析和结果展示- 仿真实验结果的分析和评估五、总结与展望- 研究成果的总结和归纳- 研究不足和未来研究方向的展望- 研究的应用价值和意义注:提纲仅供参考,可根据研究具体情况进行拓展和修改。
一、引言潜艇机动规避主动定向声纳浮标是一种应用声学定位技术对潜艇进行追踪与探测的方法,因其高信噪比、高精度、互相隔离等特点,已成为目前海上安全防御中不可或缺的重要手段。
然而,由于潜艇的低速机动、灵活转向等特点,使得其规避声纳浮标的过程非常困难,且噪声与声波散射的影响也使得声学信号的接收与处理更加艰难。
因此,对于潜艇机动规避声纳浮标方法的研究具有重要的科学意义和应用价值。
在国内外,学者们对于潜艇机动规避声纳浮标方法的研究取得了一定的成果。
国外主要是美国、法国、俄罗斯等国家,在技术方案、性能评估等方面积累了丰富的经验和成果。
而在国内,近年来,由于我国海上安全形势的不断升级,我国也建立了一支完备的舰艇防护力量,并投入大量的科技研发资源用于潜艇机动规避声纳浮标方法的研究与应用。
不仅如此,我国在声学信号处理领域也取得了很大的成绩,对于声纳浮标探测技术和潜艇机动规避技术提供了更加完善的理论基础和技术支持。
因此,深入研究潜艇机动规避主动定向声纳浮标方法,对于提高我国潜艇在海上保密性、隐蔽性和安全性具有重要的现实意义和深远的历史意义。
本文将在现有研究成果的基础上,进行进一步的理论探讨与技术研究,以期提供更加完善的技术方案和工程应用方案。
浮标定位算法的仿真研究
【 关键 词 】声 呐 浮标 ; 频 分析 与记 录 ; 关 检 测 与定 位 ; 低 相 快速 傅 里 叶 变换 【 图分 类 号 】T 5 中 B6 【 献 标 识 码 】A 文
Si ul in m ato and Re e c s ar h o So buo Lo ato A l rt n no y c in go ihm
【 摘 要 】 声 呐浮 标 可 以 对 目标 进 行检 测 、 定位 、 踪和 分 类 识 别 , 跟 因此 浮 标定 位 算 法 的研 究 非 常 关键 。 目前 常 用 的
算 法 有低 频搜 索 与记 录 ( O A , 关 探 测 与搜 索 ( O A ) , 要 对 这 两 种 声 呐 浮 标 定 位 算 法进 行 了研 究和 计 L F R)相 CD R等 主 算机 仿 真 分 析 , 不 同背 景条 件 下 研 究 了各 种 算 法 的 原理 和 性 能 。 在
确 定 目标 的位置 . 于 现 代 的反 潜 战 尤 为 重要 , 对 因为 它
是 发现 潜 艇 的最 准确 且 快 速 的方 法 。声 呐 浮标 定 位 中
2 浮标 定 位 算 法原 理 分 析
21 L AR 算 法 . OF
t e tr e ,S h r na in ai mei f s n b o s wo ty o n e t a in r s n l h o h a g t O t e o e tt rt i o h t o o o u y i r f iv si t .P e e t t e c mmo s r h t c h g o y n u e a i mei t c i L AR. C s OF ODAR a d S n e ai mei f t e o e tt n o h o o u y a e su id a d a a y e .T r u h n O 0 . r h t o h r n ai f t e s n b o r td e n n lz d h o g t c i o te c mp tr smu ain, h o ue i l t o
磁探仪搜潜模拟仿真设计方法
强等优点 , 特别适合对大面积海域进行 决速 艇 磁场 的存 在 , 此时合 成 的磁 场为 。
当潜 艇磁 场扰 动地 磁 场 发生 变 化 时 , 在 方 向上 得 到 一 个 磁 场 矢 量
1 =
其它搜潜设备已发现潜艇的大致方位时 , 用 地 磁 场 矢 量
M / , r
,
当 = 时
0 o
, '、
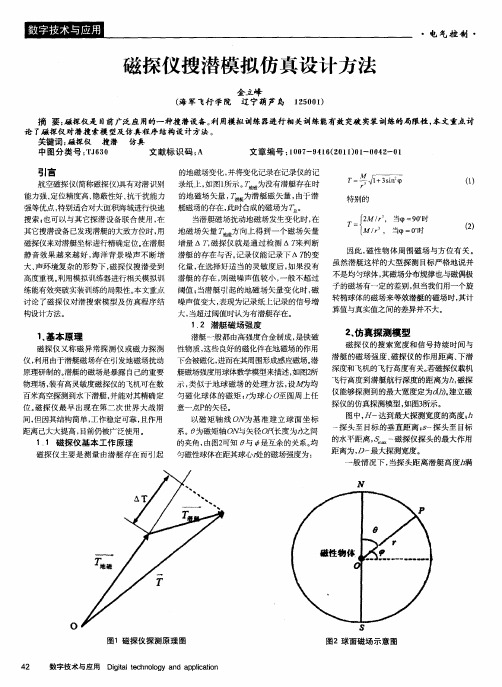
磁探仪来对潜艇坐标进行精确定位。 在潜艇 增量 △ 磁探仪就是通过检测 A殊 判断
静 音 效 果 越 来 越 好 , 洋 背 景 噪声 不 断 增 潜 艇 的存 在 与否 。 录仪 能 记 录下 △7 变 海 记 的 高度 重 视 。 用模 拟训 练器 进 行相 关模 拟 训 利
子 的磁 场有 一 定 的差别 , 当我 们用 一个 旋 但
其计 讨 论 了磁探 仪 对 潜 搜 索模 型 及 仿 真 程 序 结 噪声值变大 , 表现为记录纸上记录的信号增 转椭球体的磁场来等效潜艇 的磁场时, 算值与真实值之间的差异并不大。 构设计 方法 。 大, 当超过阈值时认为有潜艇存在 。
图2 球 面 磁 场 示 意 图
ቤተ መጻሕፍቲ ባይዱ
・
电气控制 ・
时, 探测宽度0由为 : ()
拟 ; 真训练系统主计算机为核心 , 以仿 完成 上 实现 了记 录仪 的仿真 显示 , 可实 时模 拟 既
足条件五 ≤
1 h 当 H 时 () f / ≤l √二 DH = ,当 g 3 i
,
系统模型建立 、 信号 处理 仿真和运算 的平 信号 在 记录 纸 上 的显示 情 况 , 又可在 训练 后 台; 以工控机系统完成控制台多种开 关的监 重现探测结果。 利用模拟训练器进行相关模
多机吊放声纳检查搜潜建模与仿真研究
S mu ain r s a c n d l u li gb s do h c ig s b r es a c f i lt e e r ha dmo e i n a e nc e k n u ma i e r ho o b d n mut arr f dp i g s n r l — i at ip n o a i c
WUMi ng
( v l ligAc d my Na a yn a e ,Huu a 2 0 Chn ) F ld o 1 5 0 , 1 ia
Ab t a t T e eo es ac i gp o a i t f h c i g s a c , f u - i r f h c i g s b r es ac d l o ip n o a sr c : o d v lp t e rh n r b b ly o e k n e r h o rar atc e k n u ma i e r h mo es f p i g ̄ n r h i c c n d
s c s a all e c , mu t l—t g e r ha ds w— oh s a c , s b rn v n d l s a c r b b ly mo e eb i . T e u ha rl a h p e sr l p e sa es a c n a t t r h u ma e i o e i mo i gmo e s e rh p o a i t d l r u l , i a t h i f e c f h a ei s f u ma ie ii aia in c u s s s a eb t e n d p ig s n r , s a c n e s s n l z d a dsmu ae . n u n eo t ev r t s b rn t l t o e , p c e e i p n o a s e rh ma n r ay e i l td l i e o ni z o r w ia n
反潜直升机吊放声纳应召搜潜仿真研究_盛文平
第 31 卷第6期指挥控制与仿真Command Control & SimulationVol.31 No.6 Dec.20092009 年 12 月 文章编号:1673-3819(2009)06-0084-05反潜直升机吊放声纳应召搜潜仿真研究盛文平,王 磊,汪 浩,郭 巍(海军航空工程学院,山东 烟台 264001) 摘 要:反潜直升机使用吊放声纳应召搜潜是其搜潜的主要方式之一。
本文在分析吊放声纳应召搜潜过程的基础 上,对仿真环境进行假设,并建立吊放声纳搜潜蒙特卡洛法模型,通过仿真试验对反潜直升机在一定条件下应召 搜潜时吊放声纳间隔系数、螺旋系数、探测点数和搜索阵型进行研究。
通过研究发现, 无论单机或双机,采用螺 旋线阵搜潜效果都是比较好的,且螺旋阵螺旋系数分别取 0.6 和 0.7。
关键词:吊放声纳;应召搜潜;仿真研究 中图分类号:E843 文献标识码:A DOI: 10.3969/j.issn.1673-3819.2009.06.023Simulative Research on Responding- antisubmarine of ASW Helicopter Which Using Dipping-sonarSHENG Wen-Ping , WANG Lei , WANG Hao, GUO Wei (Naval Aeronautical Engineering Institute, Yantai 264001, China) Abstract: Responding- antisubmarine is one of major antisubmarine method of ASW helicopter which using dipping sonar. In the base of analyzing the dipping sonar responding- antisubmarine search process, carrying on the simulation environment, building the MonteCalo model of dipping sonar, study the dipping sonar coefficient at interval, spiral coefficient, the checked number of detection, and search formation. By way of studying, no matter single or double helicopter, it’s better to use helix battle array and spiral coefficient is taken 0.6 and 0.7 respectively. Key words: dipping sonar; responding- antisubmarine; simulative research反潜直升机应召搜潜是指反潜机在机场、载舰或 指定空域待命,当获得敌潜艇的活动信息后,飞往发 现潜艇的海区, 搜索、 跟踪或攻击敌潜艇的战斗行动。
声纳浮标阵搜潜效能通用仿真模型研究
2 仿 真 模 型 基 础
2 1 声 纳 浮标 阵搜 潜 效 能 影 响 因 素 分析 . 影 响声 纳 浮 标 阵 搜潜 效 能 的 因素 主 要 包 括 :
声 纳 浮 标 阵 的搜 潜 效 能 是 声 纳 浮 标作 战使 用
的重要 基 础 , 影 响声 纳浮 标 阵搜 潜效 能 的因素 非 但
Abs r c :By n l sn is p r tn me ha im i d t i, h g n r l i lto mo e f s a c n ta t a ay i g t o e ai g c ns n eal t e e e a smu ai n d l o e r hig
e f ci e e so o o u ra s s t n te b s fM o t ro m eho Th sm o e a e o fe tv n s fs n b oy a r y i eup o h a e o n e Ca l t d. i d lc n be us d t s l e t e sm u ai n c lult r b e o v r o o u y a r y i n p r t g c n ii s o v h i lto ac a i p o l m f e e y s n b o ra n a y o e a i o d t on n on .
丛 红 日 : 纳 浮 标 阵 搜 潜 效 能 通 用 仿 真 模 型 研 究 声
15 0
2 1 1 声纳 浮 标 系统 的技 战 术性 能 . .
声 纳 浮 标 系 统 主 要 包 括 监 听 子 系 统 和 声 纳
声 纳浮 标 阵搜 潜 效 能通 用 仿 真模 型研 究
丛 红 日
反潜直升机吊放声呐应召搜潜效能建模与仿真分析

A S t u d y o n t h e Mo d e l i n g a n d S i mu l a t i o n o f On - c a l l e d An t i - s u b ma r i n e o f AS W He l i c o p t e r b y Us i n g Di p p i n g S o n a r
a n d b ui l d s e a r c h i n g e ic f i e n c y mo d e l o f d i p p i n g s o n a r b y r o u n d o r s q u a r e s e a r c h i n g s h a p e s a c c o r di ng t o t h e r e g u l a r s c a t t e r p a t t e r n o f t he s u bma r i n e .S i mu l a t i o n a n a l y z e s t h e s e a r c h i n g e f ic f i e n c y b y u s i n g d i p p i n g s o n a r o n t h e c o n d i t i o n o f t h e k n o wn s ub ma r i n e i n i t i a l l o c a t i o n a n d t h e u n kn o wn c o u r s e a nd s p e e d o f s u b —
一种声纳浮标搜潜系统试验方案
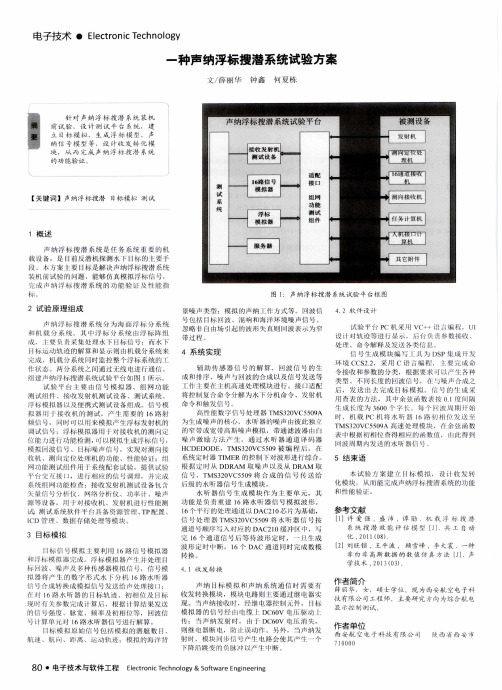
4 系 统 实 现
}l}j助 传 感 器 佑 的 解 钟 、 波 =}的 qi 成 l 干f1排 序 、 噪 声 孙 波 的 合 成 以及 信 号 发送 等 l:件 1 要Ct- 机 高 速 处 删 模 块 进 行 。接 i 1适 配 将 挖 制 复 合 命 令 分解 为 水 卜分 机 命 令 、 投身寸机 命 令 币ll触 发 f
电子技术 · Electronic Technology
一 种声纳浮标搜潜 系统试验 方案
《2024年多波束成像声呐仿真及成像分析研究》范文

《多波束成像声呐仿真及成像分析研究》篇一一、引言多波束成像声呐(Multi-beam Imaging Sonar)是一种高分辨率、高精度的水下探测设备,广泛应用于海洋科学研究、水下考古、海洋资源勘探等领域。
随着计算机技术的不断发展,声呐仿真技术已成为多波束成像声呐研究和设计的重要手段。
本文将就多波束成像声呐的仿真技术及成像分析进行详细的研究,为实际工程应用提供理论依据和参考。
二、多波束成像声呐原理多波束成像声呐通过发射多个声波束,对水下目标进行扫描和探测。
其基本原理包括声波发射、信号传播、回波接收和信号处理等过程。
在声波发射阶段,声呐系统通过阵列换能器发射多个指向性声波束,并在水体中传播。
当这些声波遇到水下目标时,会产生回波信号。
这些回波信号被声呐系统接收后,经过信号处理和成像算法的处理,最终形成水下目标的图像。
三、多波束成像声呐仿真技术多波束成像声呐仿真技术是利用计算机技术模拟声呐系统的实际工作过程,包括声波传播、回波接收、信号处理和成像等环节。
仿真过程中需要考虑声波的传播速度、传播路径、介质属性、环境噪声等因素。
此外,还需要根据具体的阵列换能器设计、发射波形等因素建立相应的仿真模型。
仿真过程大致分为以下几个步骤:1. 建立仿真模型:根据实际声呐系统的结构和参数,建立相应的仿真模型。
2. 设定仿真参数:包括声速、介质属性、环境噪声等参数的设置。
3. 模拟声波传播:通过数值计算方法模拟声波在水中的传播过程。
4. 回波信号接收:模拟水下目标对声波的反射和散射,以及回波信号的接收过程。
5. 信号处理和成像:对接收到的回波信号进行滤波、放大、采样等处理,并利用成像算法形成水下目标的图像。
四、多波束成像声呐成像分析多波束成像声呐的成像质量受到多种因素的影响,包括声波传播特性、阵列换能器设计、发射波形等。
为了对多波束成像声呐的成像性能进行准确评估,需要进行详细的成像分析。
首先,要分析不同环境因素对成像质量的影响。
声呐浮标搜潜系统“六性”初步设计

2020年第 3 期 声学与电子工程 总第 139 期声呐浮标搜潜系统“六性”初步设计张丽品 罗博(第七一五研究所,杭州,310023)摘要声呐浮标搜潜系统的组成设备较多,系统复杂度较高,为满足可靠性、维修性、测试性、安全性、保障性和环境适应性(简称“六性”)指标要求,文章阐述了在方案阶段进行声呐浮标搜潜系统“六性”初步设计的主要内容,为系统在后续阶段“六性”工作的开展奠定了基础。
关键词声呐浮标搜潜系统;方案阶段;“六性”初步设计声呐浮标搜潜系统是反潜巡逻飞机的核心搜潜装备,主要用于:对敌潜艇进行探测、定位、跟踪和识别;对海洋环境噪声和海水温度深度进行测量和处理;对主动声呐等设备发射的声脉冲信号进行水声侦察,对U/V波段通信信号和雷达信号进行电子侦察。
声呐浮标搜潜系统是由多个设备组成的复杂系统,为保证系统满足“六性”的指标要求,降低装备研制的质量风险,需在方案阶段将“六性”指标要求落实到系统各组成设备的设计中 [1-2]。
本文以声呐浮标搜潜系统成品协议书为基础,结合“六性”工程理论方法,对系统开展“六性”初步设计,实现装备功能、性能与“六性”的同步设计,从而提高装备的完好性和任务成功性。
1系统组成声呐浮标搜潜系统由声呐浮标处理系统和声呐浮标组成,系统组成框图如图1所示。
声呐浮标处理系统包括声呐信号处理机、声呐显控处理机、显示器、通用键盘、摸球、浮标接收解调模块、浮标遥控模块和声呐浮标参考分系统;声呐浮标为一次性投放使用产品,没有平均故障时间要求,不需要开展可靠性分配、可靠性建模与预计;无需维修,不开展维修性设计;在贮存期内无需测试,不开展测试性分配、测试性预计和嵌入式诊断设计。
2可靠性设计2.1 可靠性分配可靠性分配方法包括等值分配法、评分分配法、比例组合法等。
综合考虑声呐浮标处理系统的使用环境、各功能模块复杂程度和技术发展水平等因素,在方案阶段宜采用评分分配法对系统进行可靠性分配[3]。
图1声呐浮标搜潜系统组成框图2.2 基本可靠性建模与预计声呐浮标处理系统的基本可靠性模型为串联模型,如图2所示。
反潜巡逻机搜潜仿真设计方法①
反潜巡逻机搜潜仿真设计方法①作者:金立峰于凤全来源:《数字技术与应用》2012年第09期摘要:反潜巡逻机是大国海军加强航空反潜力量的有效平台和工具。
本文对巡逻机装备的主要搜潜设备的性能特点进行了分析,在此基础上对其作战使用进行了系统研究。
仿真结果表明,只有将声纳浮标和磁探仪配合使用,才能取得事半功倍的作战效果。
关键词:反潜巡逻机声纳浮标磁探仪仿真中图分类号:E86 文献标识码:A 文章编号:1007-9416(2012)09-0133-021、引言声纳浮标和磁探仪是反潜巡逻机对水下状态潜艇进行探测的两种主要装备,可对水下目标进行搜索、定位、识别和跟踪。
声纳浮标具有隐蔽性好,搜索效率高,受自身噪声干扰少,定位速度慢、精度差,经济性差等特点,使其使用时机和场合受到限制。
反潜巡逻机上一般装载有被动全向声纳浮标、被动定向声纳浮标、主动全向声纳浮标、海洋噪声测量浮标、温深测量浮标等多种浮标,各种浮标使用顺序和投放数量各不相同。
另一搜潜设备磁探仪具有隐蔽性好、不受水文气象条件限制,可以连续搜索,使用简单可靠、反应迅速,定位精度高、探测距离近等特点,其使用方法和搜潜效能与声纳浮标有较大不同[1]。
因此需要对这两种搜潜设备的使用时机、搜索方法、作战效能分别进行研究。
同时,磁探仪与声纳浮标如何配合使用,提升其综合使用效果也需要进行研究。
2、反潜巡逻机搜潜仿真系统组成反潜巡逻机搜潜仿真系统主要由系统主控模块、海洋环境战场仿真模块、磁探仪探测仿真模块和声纳浮标探测仿真模块组成(如图1所示)。
2.1 系统主控模块主控模块对整个系统的其它模块可实时控制,主要负责系统环境的构架和空情的实时仿真,系统运行时可进行特殊情况设置、处置,仿真次数,仿真结果及对飞行的有关参数进行设置等多项功能,该仿真模块主要由四个子模块组成:2.1.1 仿真环境模块建立整个系统的仿真环境,进行系统授时、网络设置、分配各席位的IP地址,协调潜艇、飞机仿真单元间工作,产生相关空情等。
反潜巡逻机声呐浮标区域搜索研究——布听同步搜索
反潜巡逻机声呐浮标区域搜索研究——布听同步搜索
谭安胜;王新为
【期刊名称】《电光与控制》
【年(卷),期】2017(024)005
【摘要】基于对区域搜索特点的认识,提出反潜巡逻机使用声呐浮标对潜区域搜索时,必须将布设浮标阵、监听浮标阵以及布阵与听阵之间的关系综合一体考虑的观点.基于对声呐浮标区域搜索态势的分析,提出了反潜巡逻机使用声呐浮标对潜区域搜索的“两类三种”搜索方法,以及得到接触后的行动方法.针对每种搜索方法,提出了标准浮标阵的概念,建立了各种搜索方法的搜索效率计算模型.给出了反潜巡逻机使用声呐浮标对潜区域搜索的筹划步骤.本文主要探讨布听同步搜索的两种方法,并给出了使用这两种搜索方法对潜区域搜索筹划的范例.
【总页数】9页(P1-9)
【作者】谭安胜;王新为
【作者单位】海军大连舰艇学院舰船指挥系,辽宁大连116018;海军大连舰艇学院舰船指挥系,辽宁大连116018
【正文语种】中文
【中图分类】E925.4
【相关文献】
1.反潜巡逻机声呐浮标巡逻搜索态势分析模型 [J], 谭安胜;王新为;尹成义
2.反潜巡逻机声呐浮标区域搜索研究——布听异步搜索 [J], 谭安胜;王新为
3.反潜巡逻机声呐浮标巡逻搜索得到接触后行动方法研究 [J], 谭安胜;王新为;尹成义
4.反潜巡逻机声呐浮标应召搜索研究——态势分析与包围阵参数确定 [J], 谭安胜
5.反潜巡逻机声呐浮标应召搜索研究——搜索兵力运用与部署 [J], 谭安胜
因版权原因,仅展示原文概要,查看原文内容请购买。
声纳浮标与磁探联合搜潜仿真研究
B = 2 D2 − (H + h)2
(1)
N = 2R/ B
(2)
3 2
反潜巡逻机接到反潜任务飞到指定海域,按照一定的阵
1
形投放被动全向声纳浮标,声纳浮标入水后开始工作,当阵
0
形中一枚声纳浮标发现潜艇,即潜艇已经航行到声纳浮标的
作用范围之内,巡逻中的巡逻机接收浮标发送的信息,进而
-1
判定潜艇目标的存在后,立即到达浮标作用范围所在的海
磁探仪距离海面的高度/m
图 5 搜潜概率及搜潜时间随磁探距海面高度变化
0.96
0.94
搜 索0.92 到 潜 0.9 艇 的0.88 概 率0.86
0.84
搜索概率 搜索时间0.035来自0.030.025搜 索
0.02
到 潜
艇
0.015的
时
0.01 间
/h
0.005
0.82
0
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
声纳浮标作用半径 R/Km
0.849
0.0142
0.848
搜 0.847
索 0.846
到
潜 0.845
艇 的 0.844
概 率
0.843
0.842
0.841
搜索概率 搜索时间
0.0414.
搜
0.014 索
到
潜 0.0139 艇
的
0.0138
时 间
/h
0.0137
0.84
0.0136
50 60 70 80 90 100 110 120 130 140 150
CUI Xu-tao, YANG Ri-jie, HE You
反潜巡逻线中声纳浮标的作战使用与搜潜方法

反潜巡逻线中声纳浮标的作战使用与搜潜方法V o1.36.No.9Sep,201l火力与指挥控制FireControl&CommandControl第36卷第9期2011年9月文章编号:1002—0640(2011)09—0112—03反潜巡逻线中声纳浮标的作战使用与搜潜方法陈庆风,鞠建波,赵明(海军航空工程学院,山东烟台264001)摘要:声纳浮标是一种效果好,受地域限制较小,使用方便的探潜设备,利用声纳浮标阵搜索潜艇需要考虑的因素很多,其中最重要的是发现概率.主要研究了使用声纳浮标在巡逻线搜索时的浮标阵的布设方法和布阵要素,讨论了发现可疑信号后对接触进行识别时的浮标布设模型,并分析了浮标间距对巡逻线搜潜的影响,对作战中布设浮标阵有一定参考意义.关键词:航空搜潜,发现概率,声纳浮标中图分类号:TB566;U666.7文献标识码:A UsingandDetectionMethodsofSonobuoyinSearchingSubmarineatBeatCHENQing—feng,JUJian—bo,ZHAOMing (NavalAeronauticalandAstronauticalUniversity,Yantai264001,China)Abstract:sonobuoyisakindofeffective,littlelimitedwithregionandconvenientequipmenttodetect submarine.Alotoffactorsshouldbeconsideredwhenusingsonobuovbalktosearchsubmarine,themost importantfactorisdetectionprobability.Thispaperresearchesthemethodsandessentialfactorson arrangingBuoy,—Arraywhenusingsonobuoyatbeatanddiscountsthecastingmodelofbuoy—*arraywh ensomesuspicioussignalsweredetected.ThepaperanalysestheinfluenceofBuoy—intervalondetect probability,theseresultsaresignificantforcastingbuoy-arrayatbeat.Keywords:airbornesearchingsubmarine,detectionprobability,sonobuoy引言1浮标的种类与使用时机航空反潜以其快速机动,搜潜效率高,隐蔽安全等特性将在反潜作战中占据最重要的地位,反潜行动包括:搜潜,跟踪和攻击.搜潜是其他活动的基础.为了搜索潜艇,反潜飞机可能使用:声纳浮标,吊放声纳,磁探仪,机载雷达等设备.在众多的搜潜装备中,声纳浮标(以下简称为浮标)具有体积小,搜索面积大,效率高,隐蔽性好,不受海区限制等优点.尤其是远距执行反潜任务时,使用反潜巡逻机携带声纳浮标可迅速到达指定海域完成任务,使其成为航空搜潜的主要装备.收稿日期:2010—05—17修回日期:2010—08—29作者简介:陈庆风(1986一),男,河南信阳人,硕士,研究方向:水声工程.声纳浮标根据工作频率,可分为:声频,次声频.根据定向方法和范围分为:被动全向,被动定向,主动全向,主动定向等4种.主动定向声纳浮标作用距离较小而且不隐蔽,但其定位精度高,定位速度快,因此多用于攻击前的快速精确定位,也可用于应召搜索距离近位置较明确的潜艇[1].被动浮标相对主动浮标造价低,隐蔽性好,是一种布设方便,搜索范围大,搜索效率高的搜潜装备,是目前作战使用的主要浮标种类,此外还有温深,海洋噪声等辅助性浮标主要用在布设搜索浮标阵前海洋环境的探测为设定搜索浮标阵的作战参数提供依据.2海洋环境对浮标使用的影响声纳浮标听测水下目标的距离取决于浮标种类,水文条件,海况,水下目标航行速度,下潜深度和噪声,及浮标的灵敏度,目前浮标仅能在五级海况下陈庆风,等:反潜巡逻线中声纳浮标的作战使用与搜潜方法(总第36—1729)?113? 使用瞳],在实际使用浮标搜潜时,为了保证浮标的水听器达到最佳的探测深度和修正海洋噪声对搜潜效果的影响,应首先布设一枚温深浮标,接着布设一枚海洋噪声浮标,机组人员根据浮标返回的数据绘制出海水温度深度曲线,同时根据海洋噪声浮标数据确定海区海洋噪声等级.根据声纳方程:主动:2TL—SL一Ⅳ—DT—DI+TS(1)被动:71£=SL1一ⅣL—D+DI(2)L为潜艇辐射噪声的声源级;ⅣL为海洋环境噪声级;DI为浮标的接收机方向性指数;DT为浮标的检测阈;丁为声传播损失.海洋环境主要影响的是丁和ⅣL这两个参数,ⅣL可由海洋噪声浮标数据确定,而L则因海洋声道,声源深度,季节的不同而变化.在典型的浅海声道中,声传播和声场依赖于海面,海水介质和海底的许多物理参数,在对这些参数不甚了解的情况下,只能近似地估计浅海的传播损失.March&Schlkin根据对海区的现场测量结果,提供了一组便于使用的半经验公式[3]:在距声源rkm处的传播损失为:丁L一10log(r)+口r+aT(r/D一1)+10log(D)+64.5一L(3)式中,a是海水吸收系数,其表达式为:口一0.1/(1+尸)+2.75×10尸+4O/(4100+)+0.03,D一(H/3+)(4)Ⅳ表示水深;L表示混合层深度;fiT为浅海有效衰减系数;K是近场异常衰减,单位为dB,对于不同的海况和海底类型,对应不同的传播频率,K的值均不同.3声纳浮标的使用方法巡逻线搜索——反潜航空兵在带状海域实施的搜索,该海域垂直于已查明的或预计的敌潜艇航线, 该方法假设敌潜艇通过该海域任一点是可能的.通常布设声纳浮标线形阵,浮标阵中浮标的数量和相邻浮标之间的间隔取决于要求的发现敌潜艇的概率,声纳浮标发现敌潜艇的距离和搜索条件,布设和监听浮标有:同时法和顺序法.本文主要介绍同时法.3.1采用同时法布设和监听浮标阵根据浮标阵的长度,与机场之间的距离,预计完成任务的时间和气象条件,布设浮标的方法分为:所有同时法(图1),分散航向法(图2),鱼贯法(图3),接力法(图4).——战术群沿同一航向同时布设所有浮标段,该方法的优点:布设浮标阵的时间等于布设一段浮标的时间,能够避免直升机的碰撞,能够正确区分发现可疑目标而发出信号的浮标.,,,’\弋}/图1所有同时法——战术群沿相反航向同时布设浮标阵,通常采用两架飞机,优点同上且组织简单.幻?5~mzdf图2分散航向法——战术群组成密集战斗队形,沿同一航向依次布设浮标阵,机群飞往浮标阵的开始布设点,直升机从该点依次布设浮标阵的一段,每架直升机布设完浮标后返回浮标段中点监听.该方法的优点是布设和组织简单,缺点是布设时间长,等于各架直升机布设时间之和.)[]>∞图3鱼贯法——战术群组成疏散战斗队形,沿同一航向依次布设浮标阵,直升机依次飞至指定浮标段的开始点,相邻直升机布设浮标的时间间隔等于前架直升机布设浮标所用时间.该方法的优点是最佳利用了直升机的飞行时间,不足是布设浮标阵的时间长.图4接力法3.2浮标阵的布设要素确定浮标阵通常是分段布设的,浮标段的长度不超过飞机一浮标之间的通信距离D通信,为了减小飞机的飞行强度,可以适当增加浮标段长度,最大长度必须满足:在直升机未能监听时间内,潜艇不能通过浮标探测区.浮标段长度公式如下:L~ea=J[)通信+(5)式中:浮标为浮标发现潜艇的距离,m为直升机与潜艇的速度之比,R机为飞机的旋回半径.▲●9÷+oo?114?(总第36--1730)火力与指挥控制201i年第9期布设完浮标后,每架直升机飞至浮标段的中央,以便监听浮标段,监听的飞行方式有长方形飞行监听和交叉飞行监听,飞行的方向可以平行于浮标段也可以垂直于浮标段.见图5.——平行浮标段飞行时飞行段长度:L飞行段一L浮标段一(1.7浮标×一nRe)(6)——垂直浮标段飞行时飞行段长度:飞行段一√D信一0.25L~um(7)T几霪雠金.—:图5平行飞行段长方形监听和垂直飞行段交叉监听3.3对接触进行识别当一枚或数枚相邻浮标发出信号时机组人员应该立即对接触进行识别,可以布设补充浮标或借助其他器材(如磁探仪,吊声等).在这里只讨论布设补充浮标的方式,补投的浮标可以是主动浮标或被动浮标,主动定向声纳浮标作用距离较小而且不隐蔽会使潜艇发觉自己已经暴露,而采取一系列规避机动,但其定位精度高,定位速度快,因此多用于攻击前的快速精确定位,而被动多用于对潜艇攻击前连续跟踪以搜集更多潜艇的运动信息,具体采用哪种浮标需根据战场实际情况来决定.直升机飞向发出信号的浮标时,如果该浮标还在发出信号,可以采用十字型或三角型浮标阵,如果该浮标未发出信号则应采用包围型浮标阵.l_5:fiIfII??f互t图6十字型,三角型与包围型浮标阵如果补投浮标阵中的浮标未发出信号,可认为预计的潜艇航速低于潜艇实际航速,或实际滞后时间大于计算值,或布设浮标的误差过大.此时,应根据敌潜艇可能的散布位置再布设一道包围型浮标阵,如果浮标阵中浮标发出信号,机组人员应通过浮标测量潜艇位置,运动要素,结束识别过程转入攻击或跟踪过程.3.4巡逻线搜潜效率分析在巡逻线用浮标搜索潜艇的效率由发现潜艇的概率表示,它由下式计算[2]:P一2(i_,d)pP+[1一(1一PP)z](8)式中:i为浮标之间的间隔;d为浮标探测潜艇的距离,P为浮标技术完好率,P为机组人员对接触识别的概率.在实际使用中特定浮标的探测距离和技术完好率通常是确定的,机组人员的识别概率在一定技术条件下也是变化不大的,关于探测概率, 讨论如下:fP一(2一PP)PP,i—dlP一0.67PP+o.33[-1一(1一PP).],i一1.5d P—PP,i一2d1P一P尸,>24L理论和实践都证明,P和P,的取值范围通常在0.7~O.9之间引,取P一0.8和P一0.8计算出i与d在上述几种关系下的发现概率,见表1.表1几种典型条件下的发现概率,dP(户一0.8,P一0.8)i—时0.87i一1.5d时0.72一2d时0.64>2d时<O.64通过上述计算和图表可以看出声纳浮标的搜潜科概率与浮标布设间隔及浮鬈标的探测距离紧密相关.当i—d时探测概率最大,浮标探测距离一定时,不同的浮标布设间隔其发图7概率也不相同,随着浮标布设间隔的增大,发现概率逐渐减小.4结论本文介绍了浮标的种类及其使用时机,海洋环境对浮标使用的影响,较为详细地讨论了浮标在巡逻线作战使用方法,并对浮标搜潜效能进行分析,为作战中更好地使用声纳浮标,提高搜潜概率,提供了一定指导.参考文献:il1]王德石,WaiteAD.实用声纳工程[M].北京:电子工业出版社,2004.E2]纪金耀.俄罗斯海军反潜战术[M].北京:海军司令部军训部,2001.[3]UriekR.PrinciplesofUnderwaterS0und[c]//3rd ed.NewYork:McGRAW—Hill,1983.[4]丁松林,闫国玉.反潜巡逻线搜索中声纳浮标发现概率的定量评估[J].舰船电子对抗,2005:28(5): 38—40.。
一种声纳浮标搜潜系统试验方案
一种声纳浮标搜潜系统试验方案声纳浮标搜潜系统是一种用于水下目标和追踪的装置,通过声学信号传播和接收实现对水下目标的定位和识别。
声纳浮标通常由声纳传感器、数据处理单元和通信模块等组成,能够在海洋环境中实现水下目标的监测和定位。
为了验证声纳浮标搜潜系统的性能和可靠性,下面提出一种试验方案。
**试验目标:**验证声纳浮标搜潜系统的水下目标和追踪性能,在不同海洋环境条件下进行测试,并对系统的定位精度、响应速度和稳定性进行评估。
**试验设备:**1.声纳浮标搜潜系统:包括声纳传感器、数据处理单元、通信模块等。
2.模拟水下目标:可以是声纳信号发射器、水下机器人或标有声纳信号标识的目标物体。
3.水下测量设备:包括水下定位系统、水下测距仪等。
**试验过程:**1.场地选择:选择海洋环境条件相对恶劣的测试场地,例如潜水区域、海底复杂地形区域等。
2.系统准备:检查声纳浮标搜潜系统各部件和连接线路的状态,确保正常工作。
3.水下目标模拟:将模拟水下目标安装在水下,启动目标信号发射器或激活水下机器人。
4.系统部署:将声纳浮标搜潜系统部署到水中,确保传感器与目标的有效接触。
5.信号接收:启动声纳浮标搜潜系统进行信号接收和水下目标。
6.数据处理:对接收到的信号进行实时处理和分析,确定目标位置和运动轨迹。
7.定位精度测试:通过与水下定位系统比对测试系统的定位精度和误差范围。
8.追踪性能测试:对水下目标进行移动和转向,观察系统的追踪性能和响应速度。
9.稳定性评估:在不同海洋环境条件下进行连续测试,评估系统在稳定性和抗干扰性方面的表现。
10.数据记录和分析:记录试验过程中的关键数据,分析系统的性能和工作特性。
**试验评估:**1.定位精度:评估系统在不同深度、不同距离下对水下目标的定位准确度和误差范围。
2.追踪性能:评估系统对水下目标的跟踪能力和响应速度,包括目标运动、转向和隐藏等情况。
3.稳定性和可靠性:评估系统在恶劣海洋环境条件下的稳定性和抗干扰性,以及长时间连续工作的可靠性和耐久性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
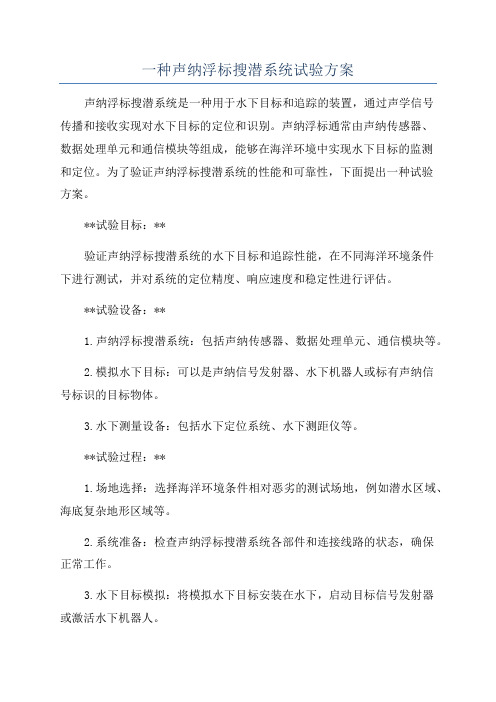
件仿真,得到反潜巡逻机多平行线搜索法的运动轨迹如图 1 所示,图中大圆表示声纳浮标的探测范围,小圆表示磁探仪 的搜索范围。设反潜机的飞行路径长度 L 略大于两倍的声 纳浮标作用距离 R ,即 L ≥ 2R ;磁探仪的作用距离为 D , 磁探仪探头距海平面的高度 H ,潜艇下潜深度 h ,则磁探 仪的搜索宽度 B 和搜索浮标探测范围所需的飞行段数 N 为:
第 20 卷第 16 期 2008 年 8 月
系 统 仿 真 学 报© Journal of System Simulation
Vol. 20 No. 16 Aug., 2008
声纳浮标与磁探联合搜潜仿真研究
崔旭涛,杨日杰,何 友
(海军航空工程学院信息融合研究所,烟台 264001)
摘 要:在声纳浮标和磁探搜潜原理的基础上,建立了在被动全向声纳浮标探测到潜艇目标的条
引言
反潜巡逻机由于具有巡航速度快、时间长、携带声纳浮 标数量多及携带反潜武器装备齐全等优点,在航空兵反潜作 战中扮演着重要角色。反潜巡逻机携带的武器装备包括主/ 被动声纳浮标及浮标信息处理系统、磁探仪、搜索雷达、红 外搜索仪等。其中,声纳浮标由于具有体积小、重量轻、隐 蔽性好、搜索效率高及适于大面积探测的特点,已成为航空 反潜的主要装备,但由于被动全向声纳浮标不能对水下目标 定位,因而通常需要和磁探仪配合,实现对水下目标的探测 与定位[1-6]。
由式(1)可以求出磁探仪的搜索宽度 B ,这样在任意时 刻 t 磁探仪的搜索范围相当于以反潜机的位置 (Pplanex, Pplaney) 为圆心,以磁探仪搜索宽度一半 B / 2 为 半径的圆;如果任意时刻 t ,磁探仪能够搜索到潜艇,则需 满足下面的公式:
(Pplanex − Psubx)2 + (Pplaney − Psuby)2 ≤ (B / 2)2 (9)
2 1.5
1
0.5
0
-0.5
-1
-1.5
-2 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2
声纳浮标作用范围/Km 图 3 潜艇初始位置分布情况
2.2 仿真结果
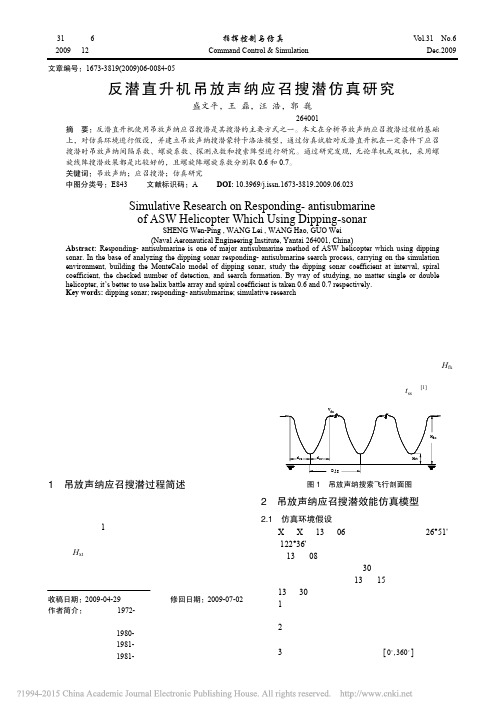
为了得到声纳浮标作用距离对搜索概率及搜潜时间的 影响,根据仿真条件及公式(10)、(13)进行仿真,当浮标的 作用距离在 1Km~3Km 时,得到搜索概率及搜潜时间随声纳 浮标作用距离变化曲线如图 4 所示。由图可以得出,在声纳
收稿日期:2007-04-10
修回日期:2007-09-11
基金项目:国家自然科学基金项目资助(60572161)
作者简介:崔旭涛(1980-), 男, 山东烟台人, 硕士, 研究方向为水声工程
杨日杰(1963-), 男, 山西大同人, 博士后, 教授, 研究方向为水声工程;
何友(1956-), 男, 吉林磐石人, 博士, 教授, 研究方向为信息融合。
在 Y 方向的位置表示为:
Pplaney = Pplaney0 + Vt , t ∈[0,T ]
(4)
Pplaney = Pplaney1 − Vt , t ∈[0,T ]
(5)
其中, Pplaney1 表示飞机飞行段终点的纵坐标,当反潜机
从 Pplaney0 到 Pplaney1 时,选择式(4)计算反潜机位置的纵
tk = ( p −1)(T + TT ) + ∆t, p ∈[1, N ],∆t ∈[0,T ]
(11)
( p −1)(T + TT ) ≤ tk ≤ pT + ( p −1)TT , p ∈[1, N ]
(12)
这样,搜索时间 t (即完成潜艇搜索的平均时间)定义为:
n
t = ∑tk / n
(13)
0.849
0.0142
0.848
搜 0.847
索 0.846
到
潜 0.845
艇 的 0.844
概 率
0.843
0.842
0.841
搜索概率 搜索时间
0.0414.
搜
0.014 索
到
潜 0.0139 艇
的
0.0138
时 间
/h
0.0137
0.84
0.0136
50 60 70 80 90 100 110 120 130 140 150
坐标;反之,选择式(5)作为计算公式。
l B/2
θ
r
次搜索中有 m 次搜索到潜艇,则搜索概率 P 定义为:
P = m/n
(10)
在 n 次多平行线搜索中,完成 1 次搜索需要的时间为
tk ,k = 1, 2,..., n ,根据仿真模型可知,如果反潜机在第 p 个 飞行段中搜索到潜艇,则 tk 满足:
从图 2 容易看出,反潜机回旋弧长 l 及回旋时间 TT 表 示为:
l = r ⋅θ = r ⋅ acos(1-(B/(2r))2 )
(6)
TT = l /V
(7)
反潜机搜潜过程中,潜艇以速度 v 作直线运动, v 在一
定范围内服从均匀分布,在 X 和 Y 坐标轴方向的分量分别
为 vx 和 v y ,潜艇初始位置在 X 和 Y 坐标轴方向的分量分别 为 Psubx0 和 Psuby0 , T 时刻后潜艇的位置在 X 和 Y 坐标
CUI Xu-tao, YANG Ri-jie, HE You
(Research Institute of Naval Aeronautical Engineering Academy, Yantai 264001, China)
Abstract: Based on the submarine-searching theory of sonobuoy and magnetic detector, a mathematical model was built, which used magnetic detector to localize submarine when the submarine was detected by the passive sonobuoy. The simulation analyzed the influence of the effective range of sonobuoy, the height of magnetic detector and submarine submergence depth on the search probability and efficiency, and positive results were attained. Key words: buoy; magnetic detector; search probability; search efficiency
0.96
0.94
搜 索0.92 到 潜 0.9 艇 的0.88 概 率0.86
0.84
搜索概率 搜索时间
0.035
0.03
0.025搜 索
0.02
到 潜
艇
0.015的
时
0.01 间
/h
0.005
0.82
0
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
声纳浮标作用半径 R/Km
在 X 和 Y 坐标轴方向的分量分别为 Pplanex0 和 Pplaney0 , T 内任意时刻反潜机的位置在 X 和 Y 坐标轴方向的分量分 别为 Pplanex 和 Pplaney ;反潜机除水平飞行段外,任意两 相邻飞行段之间存在一回旋段,回旋段弧长为 l ,回旋半径
• 4357 •
第 20 卷第 16 期 2008 年 8 月
B = 2 D2 − (H + h)2
(1)
N = 2R/ B
(2)
3 2
反潜巡逻机接到反潜任务飞到指定海域,按照一定的阵
1
形投放被动全向声纳浮标,声纳浮标入水后开始工作,当阵
0
形中一枚声纳浮标发现潜艇,即潜艇已经航行到声纳浮标的
作用范围之内,巡逻中的巡逻机接收浮标发送的信息,进而
-1
判定潜艇目标的存在后,立即到达浮标作用范围所在的海
k =1
2 搜潜概率和搜潜时间仿真研究
声纳浮标的作用距离、磁探仪距海平面高度及潜艇下潜 深度等因素,将影响声纳浮标和磁探联合搜潜概率及搜潜时 间。下面通过仿真实验研究声纳浮标的作用距离、磁探仪距 海平面高度及潜艇下潜深度三个因素对搜索概率及搜索所 需时间的影响。
2.1 仿真条件
图 2 飞机回旋的示意图
图 4 搜索概率及搜索时间随声纳浮标作用距离变化
为了得到磁探仪距海面高度对搜索概率及搜潜时间的 影响,根据仿真条件及公式(1)、(10)、(13)进行仿真,当磁 探仪距海面高度为 60~150 米时,得到搜索概率及搜潜时间 随磁探仪距海面高度变化曲线如图 5 所示。由图可以得出, 在声纳浮标已搜到潜艇的基础上,利用磁探仪使用多平行线 搜索方法进行搜索,搜潜概率随磁探仪距海面高度增大而降 低;搜潜时间随磁探仪距海面高度增大而增加。
• 4358 •
第 20 卷第 16 期 2008 年 8 月
崔旭涛,等:声纳浮标与磁探联合搜潜仿真研究
Vol. 20 No. 16 Aug., 2008
浮标已搜到潜艇的基础上,利用磁探仪使用多平行线搜索方 法进行搜索,搜潜概率随声纳浮标作用半径变化呈起伏变 化,在 1~2.3Km 之间,搜索概率随搜索半径增大而减小, 在 2.4~2.7Km 之间,搜素概率随搜索半径的增大而增大;在 2.8~3Km 之间,搜索概率随搜索半径的增大而减小;搜潜时 间随声纳浮标作用半径增大而增加。
件下,利用磁探仪对潜艇进行定位的相关数学模型,仿真分析了声纳浮标作用范围、磁探仪高度、
潜艇下潜深度等因素对搜潜概率及搜潜效率的影响,获得了有益的效果。