中值滤波和均值滤波代码
一些软件滤波算法的原理和程序源代码
一些软件滤波算法的原理和程序源代码滤波算法是信号处理中常用的技术,用于去除信号中的噪声或抽取感兴趣的信号特征。
在本文中,我将介绍几种常见的软件滤波算法的原理和程序源代码,包括均值滤波、中值滤波和高斯滤波。
1.均值滤波均值滤波是一种简单直观的滤波算法。
其原理是通过计算像素周围邻近像素的平均值,来替换掉原始图像像素的值。
均值滤波的算法步骤如下:-创建一个大小为n的窗口(n通常为奇数),以当前像素为中心。
-计算窗口中所有像素的平均值。
-将当前像素的值替换为计算得到的平均值。
-按顺序处理所有像素。
以下是均值滤波的C++程序源代码示例:```cppvoid meanFilter(const cv::Mat& src, cv::Mat& dst, int kernelSize)int kernelHalfSize = kernelSize / 2;dst.create(src.size(, src.type();for (int y = 0; y < src.rows; y++)for (int x = 0; x < src.cols; x++)cv::Vec3f sum = cv::Vec3f(0, 0, 0);int numPixels = 0;for (int ky = -kernelHalfSize; ky <= kernelHalfSize; ky++) for (int kx = -kernelHalfSize; kx <= kernelHalfSize; kx++) int px = x + kx;int py = y + ky;if (px >= 0 && py >= 0 && px < src.cols && py < src.rows) sum += src.at<cv::Vec3b>(py, px);numPixels++;}}}cv::Vec3f average = sum / numPixels;dst.at<cv::Vec3b>(y, x) = average;}}```2.中值滤波中值滤波是一种非线性滤波算法,主要用于去除图片中的椒盐噪声。
10种简单的数字滤波算法(C++源程序)

10种简单的数字滤波算法(C++源程序)以下是10种简单的数字滤波算法C++实现示例:1. 均值滤波均值滤波是数字滤波算法的一种常见形式,它可以通过计算一定范围内像素值的平均值来平滑图像。
其C++实现如下:#include <iostream>#include <opencv2/opencv.hpp>using namespace std;using namespace cv;// Function to implement mean filtervoid meanBlur(Mat& img, Mat& result, int k_size){int img_rows = img.rows;int img_cols = img.cols;// Create a same sized blank imageresult.create(img_rows, img_cols, img.type());for(int r=0; r<img_rows; r++){for(int c=0; c<img_cols; c++){// Define the window of radius k_sizeint r_min = max(0, r-k_size/2);int r_max = min(img_rows-1, r+k_size/2);int c_min = max(0, c-k_size/2);int c_max = min(img_cols-1, c+k_size/2);// Calculate the mean valueint sum = 0;int count = 0;for (int i=r_min; i<=r_max; i++){for (int j=c_min; j<=c_max; j++){sum += img.at<uchar>(i,j);count++;}}result.at<uchar>(r,c) = (uchar) (sum/count);}}}int main(int argc, char** argv){// Load the imageMat img = imread("image.jpg", 0);// Check if image is loaded properlyif(!img.data){cout << "Failed to load image" << endl;return -1;}// Define the kernel sizeint k_size = 3;// Apply mean filterMat result;meanBlur(img, result, k_size);// Display the resultnamedWindow("Original Image", WINDOW_NORMAL);namedWindow("Mean Filtered Image", WINDOW_NORMAL);imshow("Original Image", img);imshow("Mean Filtered Image", result);waitKey(0);return 0;}在上述代码中,`meanBlur()` 函数接收一个输入图像`img` 和一个输出图像`result`,以及一个整数参数`k_size`,该参数指定滤波器的大小,即窗口的半径。
matlab光滑函数代码
MATLAB光滑函数代码一、引言在MATLAB中,光滑函数是一类常用的数学工具,它们提供了处理并光滑噪声信号的功能。
这些函数可以有效地对信号进行平滑处理,以便更好地识别信号的趋势和结构。
本文将介绍MATLAB中常用的光滑函数代码,并提供详细的示例和应用场景。
二、常用的光滑函数2.1 平均值滤波平均值滤波是一种简单的光滑函数,它通过计算信号中一定长度窗口内的均值来光滑信号。
MATLAB提供了函数smoothdata来实现平均值滤波。
下面是一个使用平均值滤波的示例代码:data = [1, 1, 2, 4, 3, 6, 5, 8, 10, 9];smoothed_data = smoothdata(data,'movmean',3);2.2 中值滤波中值滤波是一种常用的非线性滤波方法,它通过对信号中一定长度窗口内的数据进行排序,然后取中间值作为光滑后的数值。
MATLAB中的medfilt1函数可以实现中值滤波。
以下是一个中值滤波的示例代码:data = [1, 1, 2, 4, 3, 6, 5, 8, 10, 9];smoothed_data = medfilt1(data,3);2.3 Savitzky-Golay滤波Savitzky-Golay滤波是一种基于多项式拟合的光滑函数方法。
它通过在信号上进行多项式拟合来提取信号的趋势,并利用拟合结果对信号进行光滑处理。
MATLAB中的sgolayfilt函数可以实现Savitzky-Golay滤波。
以下是一个使用Savitzky-Golay滤波的示例代码:data = [1, 1, 2, 4, 3, 6, 5, 8, 10, 9];smoothed_data = sgolayfilt(data,3,5);三、光滑函数的应用场景光滑函数在数据处理和信号处理中有广泛的应用,以下是一些常见的应用场景:3.1 信号去噪光滑函数可以有效地去除信号中的噪声,使得信号更加清晰和易于分析。
种滤波算法程序大全(含源代码分享)

种滤波算法程序大全(含源代码分享)一、均值滤波1.1包络滤波其原理是将每个像素值替换为周围像素点的加权平均值,即取该点的邻域像素点的均值作为替换像素点的值,通过提高平均灰度和减少椒盐噪声作用。
//源代码// 函数名:meanFilte//功能:均值滤波// 输入:srcImg:源图像; meanImg:均值flied后的图像// 返回:voidvoid meanFilter(Mat srcImg, Mat meanImg)int m=srcImg.rows;int n=srcImg.cols;//掩模矩阵int mask_i, mask_j;int i, j;int sum;int mask_size=3;//maskSize=3时,卷积核为3*3的矩阵,mask_i代表卷积核中行,mask_j代表列for (mask_i = -mask_size/2;mask_i<=mask_size/2;mask_i++)for (mask_j = -mask_size/2;mask_j<=mask_size/2;mask_j++)//遍历源图像的每个像素点for (i=0;i<m;i++)for (j=0;j<n;j++)if ((mask_i+i>=0) && (mask_i+i<m) &&(mask_j+j>=0) && (mask_j+j<n))sum+=srcImg.at<uchar>(mask_i+i,mask_j+j);meanImg.at<uchar>(i,j)=sum/9;}}}1.2高斯滤波其原理是将每个像素值替换为其周围像素点与其距离的加权平均值,通过减小噪声频率,降低噪声增强图像边缘的作用。
//源代码// 函数名:gaussianFilte//功能:高斯滤波// 输入:srcImg:源图像; gausImg:高斯滤波后的图像// 返回:voidvoid gaussianFilter(Mat srcImg, Mat gausImg)int m=srcImg.rows;int n=srcImg.cols;//掩模矩阵int mask_i, mask_j;int i, j;int sum;。
最常用数字滤波方法及源代码
最常用数字滤波方法及源代码在数字信号处理中,常用的数字滤波方法有以下几种:1) 移动平均滤波(Moving Average Filter):将输入信号的过去N 个样本的平均值作为输出样本的值。
这种滤波器可以有效地平滑信号,但对于快速变化的信号可能引入较大的延迟。
2) 中值滤波(Median Filter):将输入信号的过去N个样本的中间值作为输出样本的值。
中值滤波器可以有效地去除噪声,但对于快速变化的信号可能引入较大的失真。
3) 低通滤波(Lowpass Filter):通过去除高频成分来平滑信号。
常用的低通滤波器有巴特沃斯滤波器、切比雪夫滤波器等。
以下是Python中实现这些滤波方法的简单源代码示例:移动平均滤波方法:```pythondef moving_average_filter(input_signal, window_size):filtered_signal = []for i in range(len(input_signal) - window_size + 1):window = input_signal[i:i+window_size]filtered_signal.append(sum(window) / window_size)return filtered_signal```中值滤波方法:```pythondef median_filter(input_signal, window_size):filtered_signal = []for i in range(len(input_signal) - window_size + 1):window = input_signal[i:i+window_size]filtered_signal.append(sorted(window)[window_size//2])return filtered_signal```低通滤波方法:```pythonimport scipy.signal as signaldef lowpass_filter(input_signal, cutoff_freq, fs):nyquist_freq = 0.5 * fsnormalized_cutoff_freq = cutoff_freq / nyquist_freqb, a = signal.butter(4, normalized_cutoff_freq, btype='low') filtered_signal = signal.lfilter(b, a, input_signal)return filtered_signal```注意:以上代码示例仅为简单实现,并未考虑边界情况和参数校验等细节。
图像处理——均值滤波+中值滤波(Matlab)
题目:均值滤波和中值滤波在自己的证件照中加入椒盐噪声、高斯白噪声。
分别用3*3、5*5、7*7的均值滤波器和中值滤波器进行滤波。
处理过程1.用imnoise函数在图像中分别加入椒盐噪声和高斯白噪声;2.均值滤波:用fspecial函数创建各模板大小的均值滤波器,并用imfilter函数进行滤波。
中值滤波:直接用matlab提供的medfilt2中值滤波器进行滤波即可。
处理结果程序清单(1)均值滤波rgb=imread('photo.jpg');J1=imnoise(rgb,'salt & pepper',0.02);J2=imnoise(J1,'gaussian',0,0.01);h1=fspecial('average',[3,3]);h2=fspecial('average',[5,5]);h3=fspecial('average',[7,7]);rgb1=imfilter(J2,h1);rgb2=imfilter(J2,h2);rgb3=imfilter(J2,h3);figure;subplot(2,3,1);imshow(rgb)title('原图像');subplot(2,3,2);imshow(J2)title('加入噪声后的图像');subplot(2,3,4);imshow(rgb1)title('3*3均值滤波图像');subplot(2,3,5);imshow(rgb2)title('5*5均值滤波图像');subplot(2,3,6);imshow(rgb3)title('7*7均值滤波图像');(2)中值滤波rgb=imread('photo.jpg');J1=imnoise(rgb,'salt & pepper',0.02);J2=imnoise(J1,'gaussian',0,0.01);J3=rgb2gray(J2);rgb1=medfilt2(J3,[3 3]);rgb2=medfilt2(J3,[5 5]);rgb3=medfilt2(J3,[7 7]);figure;subplot(2,3,1);imshow(rgb) title('原图像');subplot(2,3,2);imshow(J3) title('加入噪声后的图像'); subplot(2,3,4);imshow(rgb1) title('3*3中值滤波图像'); subplot(2,3,5);imshow(rgb2) title('5*5中值滤波图像'); subplot(2,3,6);imshow(rgb3) title('7*7中值滤波图像');。
中值和均值滤波---matlab...
中值和均值滤波---matlab实现(Median and mean filter ---matlabimplementation)%x is the image that needs filtering, and N is the template size (that is, n * n)Function d=avg_filter (x, n)A (1:n, 1:n) =1;%a, that is, n * n template, the element is 1[height, width]=size (x);% input image is hightxwidth, and hight>n, width>nX1=double (x);X2=x1;For i=1:hight-n+1For j=1:width-n+1C=x1 (i:i+ (n-1), j:j+ (n-1)),.*a;%, take out X1 from J (I), start n row, n column element, and template multiplyS=sum (sum (c));% the sum of the elements in the C matrixX2 (i+ (n-1), /2, j+ (n-1), /2) =s/ (n*n);% will assign the mean of the elements after the template operation to the central location of the templateEndEndNot assigned elements from% of original valueD=uint8 (x2);Self compiled median filter function. X is the image that needs filtering, and N is the template size (that is, n * n)Function d=mid_filter (x, n)[height, width]=size (x);% input images are p * q, and p>n, q>nX1=double (x);X2=x1;For i=1:height-n+1For j=1:height-n+1C=x1 (i:i+ (n-1), j:j+ (n-1));% out X1 from J (I); n row n column element, that is template (n * n)E=c (1::);% is the first row of the C matrixFor u=2:nE=[e, C (U::));% turns the C matrix into a row matrixEndMm=median (E);%mm is the medianX2 (i+ (n-1), /2, j+ (n-1) /2) =mm;%, the median of the template elements assigned to the center of the templateEndEndNot assigned elements from% of original valueD=uint8 (x2);% of the Gauss filter function, S is the need to filter the image, n is the mean, and K is the varianceFunction, d=gaussfilt (k, N, s)Img = double (s);N1=floor ((n+1) /2)% computed image centerFor i=1:nFor j=1:nB (I, J) =exp (- (i-n1) ^2+ (j-n1) ^2) / (4*k)) / (4*pi*k);EndEnd% generates Gauss sequence B.Img1=conv2 (Img, B,'same');% Gauss convolution is performed with the generated Gauss sequence convolutionD=uint8 (Img1);(5) MATLAB code of median filteringGlobal ImagenUmbral% defines a global variable, ImagenUmbralGlobal J% uses global variables JA=J% assigns J to A[m, n] = size (A);% measure image size parameterB=A;% assigns A to BPixel_block = zeros (1,9);% open up a row of nine columns of the array, were given an initial value of 0For I = 2:m-1% for each pixel in the A (excluding borders)For J = 2:n-2Pixel_block = reshape (A (i-1:i+1, j-1:j+1), 9,1);% takes the window of 3*3, and puts a pixel point and its 8 points aroundit,Store in the newly opened array pixel_blockSorted_block = sort (pixel_block);% sorted the arraypixel_blockBlock_median = sorted_block (5);%, the median value of the array is given to block_medianB (I, J) = block_median;% gives block_median the pixel value of the corresponding position of BEnd;%end, of, for, j = 2:n-2End;%end, of, for, I = 2:m-1B = uint8 (B);% converts all elements in B to integers between 0~255The subplot (224)% split drawing window is two rows and two columns, and moves the handle to fourth positionsImshow (B)% display image BImagenUmbral=B% assigns the B to the global variable ImagenUmbral(6) MATLAB implementation of mean filterA=J% assigns J to A[m, n] = size (A); the row number of%m is A, and the column number of n is AB=A;% assigns A to BPixel_block = zeros (1,9);% open up a row of nine columns of the array, were given an initial value of 0For I = 2:m-1% for each pixel in the A (excluding borders)For J = 2:n-1Pixel_block = reshape (A (i-1:i+1, j-1:j+1), 3^2,1);% uses the window of 3*3 to place a pixel and its surrounding 8 points into the newly opened array pixel_block at a timeMean_block = mean (pixel_block);%; finds the average value of all elements in an arrayB (I, J) = mean_block;% gives mean_block the pixel value of the corresponding position of BEnd;%end, of, for, j = 2:n-2End;%end, of, for, I = 2:m-1B = uint8 (B);% converts all elements in B to integers between 0~255The subplot (224)% split drawing window is two rows and twocolumns, and moves the handle to fourth positions Imshow (B)% display image BImagenUmbral=B% assigns the B to the global variable ImagenUmbral。
c语言里面平滑滤波函数
c语言里面平滑滤波函数平滑滤波在数字信号处理中起着非常重要的作用,它可以有效的去除信号中的噪声,使得信号变得更加平滑和连续。
在C语言中,我们可以利用一些算法来实现平滑滤波,比如均值滤波、中值滤波和高斯滤波等。
在本文中,我们将重点介绍这些算法的实现原理和具体的C 语言代码。
1.均值滤波均值滤波是一种最简单的平滑滤波算法,它的原理是取邻域内像素的平均值作为当前像素的值。
在C语言中,我们可以通过编写一个函数来实现均值滤波算法。
下面是一个简单的均值滤波函数的示例代码:```c#include <stdio.h>#define N 3 //邻域大小int mean_filter(int input[], int width, int height) {int output[width * height];int i, j, m, n, sum;for (i = 0; i < height; i++) {for (j = 0; j < width; j++) {sum = 0;for (m = -N/2; m <= N/2; m++) {for (n = -N/2; n <= N/2; n++) {if (i + m >= 0 && i + m < height && j + n >= 0 && j + n < width) {sum += input[(i + m) * width + (j + n)];}}}output[i * width + j] = sum / (N * N);}return output;}int main() {int input[] = {1, 2, 3, 4, 5, 6, 7, 8, 9}; //输入信号int width = 3; //信号宽度int height = 3; //信号高度int output = mean_filter(input, width, height); //平滑滤波后的信号//打印输出for (int i = 0; i < height; i++) {for (int j = 0; j < width; j++) {printf("%d ", output[i * width + j]);printf("\n");}return 0;}```上面的代码中,我们定义了一个大小为3x3的邻域,然后通过两层循环遍历所有的像素点,计算邻域内像素值的平均值,并将结果存储在output数组中。
matlab统计滤波

matlab统计滤波统计滤波是一种常用的信号处理方法,常用于滤除噪声、提取信号等方面。
它是利用一些基本的统计量来处理数据的,例如均值、标准差、中位数等等。
本文将介绍matlab中的统计滤波方法。
matlab中的统计滤波方法包括:均值滤波、中值滤波、高斯滤波等。
下面我们将逐一介绍。
1. 均值滤波均值滤波是一种简单的滤波方法,它的原理是用一个滑动窗口在信号的每个点上进行计算,将窗口内数据的平均值作为该点的值。
这样可以将信号中的噪声平滑掉,但是也会使信号的边缘模糊化。
matlab中的均值滤波函数为:smooth、filter、conv。
其中,smooth函数可以设置滑动窗口的大小和类型:y = smooth(x,span,type);其中x为输入信号,span为窗口大小,type为平均类型,包括moving、lowess、loess、sgolay等。
filter函数可以用fir低通滤波器实现均值滤波:b = ones(1, N)/N;y = filter(b, 1, x);其中,N为窗口大小,x为输入信号,y为输出信号。
y = medfilt1(x, w);3. 高斯滤波高斯滤波是一种基于高斯函数的滤波方法,它的原理是应用高斯函数对信号进行平滑,可以有效地滤除高斯白噪声、高斯随机噪声等。
imgaussfilt函数可以实现一维和二维高斯滤波:其中x为输入信号,sigma为标准差。
fspecial函数可以生成高斯滤波核:h = fspecial('gaussian', hsize, sigma);以上就是matlab中的统计滤波方法介绍,读者可根据自己的需求选择合适的方法进行信号处理。
21种nr的iqa处理算法及通用函数
21种nr的iqa处理算法及通用函数引言在数字图像处理中,图像质量评估(I QA)是一个重要的研究领域。
其中,噪声降低(N R)算法被广泛应用于提高图像的质量。
本文将介绍21种常用的NR的I Q A处理算法及通用函数。
1.均值滤波均值滤波是一种常见的降噪算法。
它通过计算像素周围邻域的均值来减小噪声。
均值滤波可以使用以下通用函数实现:d e fm ea n_fi lt er(im a ge):"""均值滤波"""实现算法代码r e tu rn fi lt er ed_im a ge2.中值滤波中值滤波也是一种常用的NR算法,它使用像素点周围邻域中的中值来减小噪声的影响。
以下是中值滤波的通用函数:d e fm ed ia n_fi lt er(i ma ge):"""中值滤波"""实现算法代码r e tu rn fi lt er ed_im a ge3.高斯滤波高斯滤波是一种基于高斯函数的线性平滑滤波器。
它通过计算像素点周围邻域的加权平均值来降低噪声。
以下是高斯滤波的通用函数:d e fg au ss ia n_fi lte r(i ma ge):"""高斯滤波"""实现算法代码r e tu rn fi lt er ed_im a ge4.双边滤波双边滤波是一种保留图像边缘的滤波方法。
它通过考虑像素点的空间距离和像素值之间的差异来平滑图像。
以下是双边滤波的通用函数:d e fb il at er al_f ilt e r(im ag e):"""双边滤波"""实现算法代码r e tu rn fi lt er ed_im a ge5.小波去噪小波去噪是一种基于小波变换的降噪方法。
openCV中值滤波和均值滤波的代码实现

openCV中值滤波和均值滤波的代码实现⽬录⼀.均值滤波⼆.中值滤波在开始我们今天的博客之前,我们需要先了解⼀下什么是滤波:⾸先我们看⼀下图像滤波的概念。
图像滤波,即在尽量保留图像细节特征的条件下对⽬标图像的噪声进⾏抑制,是图像预处理中不可缺少的操作,其处理效果的好坏将直接影响到后续图像处理和分析的有效性和可靠性。
下图左边是原图右边是噪声图:消除图像中的噪声成分叫作图像的平滑化或滤波操作。
信号或图像的能量⼤部分集中在幅度谱的低频和中频段是很常见的,⽽在较⾼频段,感兴趣的信息经常被噪声淹没。
因此⼀个能降低⾼频成分幅度的滤波器就能够减弱噪声的影响。
图像滤波的⽬的有两个:⼀是抽出对象的特征作为图像识别的特征模式;另⼀个是为适应图像处理的要求,消除图像数字化时所混⼊的噪声。
⽽对滤波处理的要求也有两条:⼀是不能损坏图像的轮廓及边缘等重要信息;⼆是使图像清晰视觉效果好。
平滑滤波是低频增强的空间域滤波技术。
它的⽬的有两类:⼀类是模糊;另⼀类是消除噪⾳。
空间域的平滑滤波⼀般采⽤简单平均法进⾏,就是求邻近像元点的平均亮度值。
邻域的⼤⼩与平滑的效果直接相关,邻域越⼤平滑的效果越好,但邻域过⼤,平滑会使边缘信息损失的越⼤,从⽽使输出的图像变得模糊,因此需合理选择邻域的⼤⼩。
关于滤波器,⼀种形象的⽐喻法是:我们可以把滤波器想象成⼀个包含加权系数的窗⼝,当使⽤这个滤波器平滑处理图像时,就把这个窗⼝放到图像之上,透过这个窗⼝来看我们得到的图像。
举⼀个滤波在我们⽣活中的应⽤:美颜的磨⽪功能。
如果将我们脸上坑坑洼洼⽐作是噪声的话,那么滤波算法就是来取出这些噪声,使我们⾃拍的⽪肤看起来很光滑。
这篇博⽂会介绍中值滤波以及均值滤波两种算法⼀.均值滤波图⽚中⼀个⽅块区域(⼀般为3*3)内,中⼼点的像素为全部点像素值的平均值。
均值滤波就是对于整张图⽚进⾏以上操作。
我们可以看下图的矩阵进⾏理解缺陷:均值滤波本⾝存在着固有的缺陷,即它不能很好地保护图像细节,在图像去噪的同时也破坏了图像的细节部分,从⽽使图像变得模糊,不能很好地去除噪声点。
中值滤波和均值滤波C++代码

中值滤波和均值滤波C++代码均值滤波和中值滤波代码2008-11-24 16:07:36| 分类: |举报|字号//------------------均值滤波器bool FilterAV(unsigned char *image,int height,int width){int i,j;unsigned char *p=(unsigned char*)malloc(height*width);for(i=1;i<height-1;i++){for(j=1;j<width-1;j++){p[i*width+j]=(unsigned char)(((int)image[(i-1)*width+j-1]+(int)image[(i-1)*width+j]+(int)image[(i-1)*width+j+1]+(int)image[i*width+j-1]+(int)image[i*width+j]+(int)image[i*width+j+1]+(int)image[(i+1)*width+j-1]+(int)image[(i+1)*width+j]+(int)image[(i+1)*width+j+1])/9);}}for(i=1;i<height-1;i++){for(j=1;j<width-1;j++){image[i*width+j]=p[i*width+j];}}free(p);return true;}//----------------------------中值滤波器bool FilterMid(unsigned char *image,int height,int width){int i,j,k,l;int pos;unsigned char temp;unsigned char psr[9];unsigned char *p=(unsigned char*)malloc(height*width); for(i=1;i<height-1;i++){for(j=1;j<width-1;j++){ //---3*3窗⼝矩阵psr[0]=image[(i-1)*width+j-1];psr[1]=image[(i-1)*width+j];psr[2]=image[(i-1)*width+j+1];psr[3]=image[i*width+j-1];psr[4]=image[i*width+j];psr[5]=image[i*width+j+1];psr[6]=image[(i+1)*width+j-1];psr[7]=image[(i+1)*width+j];psr[8]=image[(i+1)*width+j+1];//--------选择排序for(k=0;k<9;k++){pos=k;for(l=k;l<9;l++){if(psr[l]<psr[pos])pos=l;}temp=psr[k];psr[k]=psr[pos];psr[pos]=temp;}//------取中值p[i*width+j]=psr[4];}}for(i=1;i<height-1;i++){for(j=1;j<width-1;j++){image[i*width+j]=p[i*width+j]; }}free(p);return true;}。
中值和均值滤波论文(附代码)

Zi fiv fiv1 fi fiv m
iZ
(2.2)
对于二维序列 X 进行中值滤波时,滤波窗口也是二维的,但这种二维窗 ij
口可以有各种不同的形状,如线状、方形、圆形、十字形、圆环形等。二维数
据的中值滤波可以表示为:
Yi, j
Me A
d
{X
i
j
},
A为滤波窗口
(2.3)
在实际使用窗口时,窗口的尺寸一般先用3 3再取5 5 逐渐增大,直到其
2. 中值滤波
中值滤波是一种典型的低通滤波器,属于非线性滤波技术,它的目的是保护 图像边缘的同时去除噪声。所谓中值滤波,是指把以某点(x,y)为中心的小窗 口内的所有象素的灰度按从大到小的顺序排列,若窗口中的象素为奇数个,则将 中间值作为(x,y)处的灰度值。若窗口中的象素为偶数个,则取两个中间值的 平均值作为(x,y)处的灰度值。中值滤波对去除椒盐噪声很有效。中值滤波器 的缺点是对所有象素点采用一致的处理,在滤除噪声的同时有可能改变真正象 素点的值,引入误差,损坏图像的边缘和细节。该算法对高斯噪声和均匀分布 噪声就束手无策。
滤波效果满意为止。对于有缓变的较长轮廓线物体的图像,采用方形或圆形窗
口为宜,对于包含尖顶角物体的图像,适宜用十字形窗口。使用二维中值滤波
最值得注意的是保持图像中有效的细线状物体。与平均滤波器相比,中值滤波
器从总体上来说,能够较好地保留原图像中的跃变部分。
3. 均值滤波
均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板, 该模板包括了其周围的临近像素(以目标象素为中心的周围 8 个象素,构成一 个滤波模板,即去掉目标象素本身)。
for j = 1:q PI(i+m,j+m) = I(i,j);
均值滤波器中值滤波器
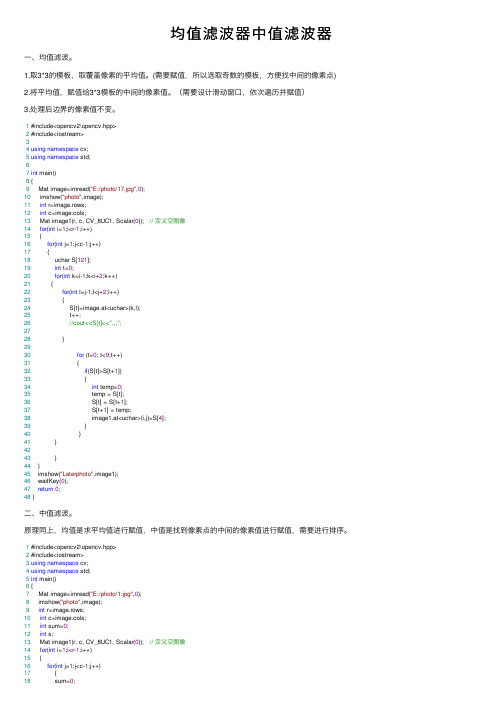
均值滤波器中值滤波器⼀、均值滤波。
1.取3*3的模板,取覆盖像素的平均值。
(需要赋值,所以选取奇数的模板,⽅便找中间的像素点)2.将平均值,赋值给3*3模板的中间的像素值。
(需要设计滑动窗⼝,依次遍历并赋值)3.处理后边界的像素值不变。
1 #include<opencv2\opencv.hpp>2 #include<iostream>34using namespace cv;5using namespace std;67int main()8 {9 Mat image=imread("E:/photo/17.jpg",0);10 imshow("photo",image);11int r=image.rows;12int c=image.cols;13 Mat image1(r, c, CV_8UC1, Scalar(0)); // 定义空图像14for(int i=1;i<r-1;i++)15 {16for(int j=1;j<c-1;j++)17 {18 uchar S[121];19int t=0;20for(int k=i-1;k<i+2;k++)21 {22for(int l=j-1;l<j+2;l++)23 {24 S[t]=image.at<uchar>(k,l);25 t++;26//cout<<S[t]<<",,,";2728 }2930for (t=0; t<9;t++)31 {32if(S[t]>S[t+1])33 {34int temp=0;35 temp = S[t];36 S[t] = S[t+1];37 S[t+1] = temp;38 image1.at<uchar>(i,j)=S[4];39 }40 }41 }4243 }44 }45 imshow("Laterphoto",image1);46 waitKey(0);47return0;48 }⼆、中值滤波。
python库skimage图像均值滤波;中值滤波;极大值滤波

python库skimage图像均值滤波;中值滤波;极⼤值滤波使⽤ view_as_blocks (来源于skimage.util)函数。
当我们想要对⾮重叠图像块执⾏局部操作时,块视图(view_as_blocks的返回值)⾮常有⽤。
我们将图像 astronaut (来源于skimage.data)切成⼩⽅块(4*4)。
在每个⽅块内部,我们计算均值、最⼤值和中位值,然后⽤这些值表⽰这个⽅块的值。
处理后结果被放在⼀起展⽰,结果中第⼀张图像为使⽤三次样条插值后形成的图像。
import numpy as npfrom scipy import ndimage as ndifrom matplotlib import pyplot as pltimport matplotlib.cm as cmfrom skimage import datafrom skimage import colorfrom skimage.util import view_as_blocks# 彩⾊图像 to 灰度图像l = color.rgb2gray(data.astronaut())# 采样块⼤⼩block_shape = (4, 4)# 将宇航员这张图像转换为矩阵块view = view_as_blocks(l, block_shape)# print(l.shape) # output:(512,512)# print(view.shape) # output:(128,128,4,4)# 将view最后两个维度压缩成⼀个flatten_view = view.reshape(view.shape[0], view.shape[1], -1)# print(flatten_view.shape) # output:(128,128,16)# 使⽤均值、最⼤值、中位值采样后形成的图像mean_view = np.mean(flatten_view, axis=2)# print(mean_view.shape) # output:(128,128)max_view = np.max(flatten_view, axis=2)median_view = np.median(flatten_view, axis=2)# 展⽰重新采样后图像fig, axes = plt.subplots(2, 2, figsize=(8, 8), sharex=True, sharey=True)# print(axes.shape) # output:(2,2)# 将数据压缩⾄⼀维ax = axes.ravel()# print(ax.shape) # output:(4,)# 三次样条插值放⼤图像l_resized = ndi.zoom(l, 2, order=3)# print(l_resized.shape) # output:(1024,1024)ax[0].set_title("Original rescaled with\n spline interpolation (order=3)")ax[0].imshow(l_resized, extent=(0, 128, 128, 0),cmap=cm.Greys_r)ax[1].set_title("Block view with\n local mean pooling")ax[1].imshow(mean_view, cmap=cm.Greys_r)ax[2].set_title("Block view with\n local max pooling")ax[2].imshow(max_view, cmap=cm.Greys_r)ax[3].set_title("Block view with\n local median pooling")ax[3].imshow(median_view, cmap=cm.Greys_r)for a in ax:a.set_axis_off()fig.tight_layout()plt.show()。
Python实现图像去噪方式(中值去噪和均值去噪)

Python实现图像去噪⽅式(中值去噪和均值去噪)实现对图像进⾏简单的⾼斯去噪和椒盐去噪。
代码如下:import numpy as npfrom PIL import Imageimport matplotlib.pyplot as pltimport randomimport scipy.miscimport scipy.signalimport scipy.ndimagefrom matplotlib.font_manager import FontPropertiesfont_set = FontProperties(fname=r"c:\windows\fonts\simsun.ttc", size=10)def medium_filter(im, x, y, step):sum_s = []for k in range(-int(step / 2), int(step / 2) + 1):for m in range(-int(step / 2), int(step / 2) + 1):sum_s.append(im[x + k][y + m])sum_s.sort()return sum_s[(int(step * step / 2) + 1)]def mean_filter(im, x, y, step):sum_s = 0for k in range(-int(step / 2), int(step / 2) + 1):for m in range(-int(step / 2), int(step / 2) + 1):sum_s += im[x + k][y + m] / (step * step)return sum_sdef convert_2d(r):n = 3# 3*3 滤波器, 每个系数都是 1/9window = np.ones((n, n)) / n ** 2# 使⽤滤波器卷积图像# mode = same 表⽰输出尺⼨等于输⼊尺⼨# boundary 表⽰采⽤对称边界条件处理图像边缘s = scipy.signal.convolve2d(r, window, mode='same', boundary='symm')return s.astype(np.uint8)def convert_3d(r):s_dsplit = []for d in range(r.shape[2]):rr = r[:, :, d]ss = convert_2d(rr)s_dsplit.append(ss)s = np.dstack(s_dsplit)return sdef add_salt_noise(img):rows, cols, dims = img.shapeR = np.mat(img[:, :, 0])G = np.mat(img[:, :, 1])B = np.mat(img[:, :, 2])Grey_sp = R * 0.299 + G * 0.587 + B * 0.114Grey_gs = R * 0.299 + G * 0.587 + B * 0.114snr = 0.9noise_num = int((1 - snr) * rows * cols)for i in range(noise_num):rand_x = random.randint(0, rows - 1)rand_y = random.randint(0, cols - 1)if random.randint(0, 1) == 0:Grey_sp[rand_x, rand_y] = 0else:Grey_sp[rand_x, rand_y] = 255#给图像加⼊⾼斯噪声Grey_gs = Grey_gs + np.random.normal(0, 48, Grey_gs.shape)Grey_gs = Grey_gs - np.full(Grey_gs.shape, np.min(Grey_gs))Grey_gs = Grey_gs * 255 / np.max(Grey_gs)Grey_gs = Grey_gs.astype(np.uint8)# 中值滤波Grey_sp_mf = scipy.ndimage.median_filter(Grey_sp, (7, 7))Grey_gs_mf = scipy.ndimage.median_filter(Grey_gs, (8, 8))# 均值滤波Grey_sp_me = convert_2d(Grey_sp)Grey_gs_me = convert_2d(Grey_gs)plt.subplot(321)plt.title('加⼊椒盐噪声',fontproperties=font_set)plt.imshow(Grey_sp, cmap='gray')plt.subplot(322)plt.title('加⼊⾼斯噪声',fontproperties=font_set)plt.imshow(Grey_gs, cmap='gray')plt.subplot(323)plt.title('中值滤波去椒盐噪声(8*8)',fontproperties=font_set)plt.imshow(Grey_sp_mf, cmap='gray')plt.subplot(324)plt.title('中值滤波去⾼斯噪声(8*8)',fontproperties=font_set)plt.imshow(Grey_gs_mf, cmap='gray')plt.subplot(325)plt.title('均值滤波去椒盐噪声',fontproperties=font_set)plt.imshow(Grey_sp_me, cmap='gray')plt.subplot(326)plt.title('均值滤波去⾼斯噪声',fontproperties=font_set)plt.imshow(Grey_gs_me, cmap='gray')plt.show()def main():img = np.array(Image.open('E:/pycharm/GraduationDesign/Test/testthree.png')) add_salt_noise(img)if __name__ == '__main__':main()效果如下以上这篇Python实现图像去噪⽅式(中值去噪和均值去噪)就是⼩编分享给⼤家的全部内容了,希望能给⼤家⼀个参考,也希望⼤家多多⽀持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
%均值滤波
clc,clear;
f=imread('2.bmp');
subplot(221),imshow(f);
f1=imnoise(f,'gaussian',0.002,0.0008);
subplot(222),imshow(f1);
k1=floor(3/2)+1;
k2=floor(3/2)+1;
X=f1;
[M,N]=size(X);
uint8 Y=zeros(M,N);
funBox=zeros(3,3);
for i=1:M-3
for j=1:N-3
funBox=X(i:i+3,j:j+3);
s=sum(funBox(:));
h=s/9;
Y(i+k1,j+k2)=h;
end;
end;
Y=Y/255;
subplot(223),imshow(Y);
注意:在matlab中,我们常使用imshow()函数来显示图像,而此时的图像矩阵可能经过了某种运算。
在matlab中,为了保证精度,经过了运算的图像矩阵I其数据类型会从unit8型变成double型。
如果直接运行imshow(I),我们会发现显示的是一个白色的图像。
这是因为imshow()显示图像时对double型是认为在0~1范围内,即大于1时都是显示为白色,而imshow显示uint8型时是0~255范围。
而经过运算的范围在0-255之间的double型数据就被不正常得显示为白色图像了。
那么如何解决这个问题呢?笔者曾经用fix()函数把图像矩阵由实数形式转化成整数形式,但这样仍无法改变图像矩阵是double型的事实。
通过搜索,找到两个解决方法:
imshow(I/256); ----------将图像矩阵转化到0-1之间
imshow(I,[]); -----------自动调整数据的范围以便于显示(不明白原理!)
PS:imshow(I,[]),将I的最小值看作0,最大值看作255,所以黑白明显
从实验结果看两种方法都解决了问题,但是从显示的图像看,第二种方法显示的图像明暗黑白对比的强烈些!不知什么原理!
此外还找到一些方法,还没有试过,记录如下:
uint8和im2uint8的区别
图像数据在计算前需要转换为double,以保证精度; 很多矩阵数据也都是double的,要想显示其,必须先转换为图像的标准数据格式. 如果转换前的数据符合图像数据标准(比如如果是double则要位于0~1之间),那么可以直接使用im2uint8
如果转换前的数据分布不合规律,则使用uint8,将其自动切割至0~255(超过255的按255)
最好使用mat2gray,将一个矩阵转化为灰度图像的数据格式(double)
另外,可以用isgray判断矩阵是否是一个图像数据矩阵
总之,im2uint8、im2double要跟uint8、double
%均值滤波
k=floor(3*3/2)+1;
[M,N]=size(X);
uint8 Z=zeros(M,N);
funBox=zeros(3,3);
temp=zeros(3*3);
for i=1:M-3
for j=1:N-3
funBox=X(i:i+3,j:j+3);
temp=funBox(:);
tempSort=sort(temp);
Z(i,j)=tempSort(k);
end;
end;
subplot(224),imshow(Z);。