基于PAC运动控制系统方案
GE PAC运动控制介绍

• IC694TBB032 拧紧式端子排* • IC694TBS032 弹簧式端子排*
光纤连接的扩展 I/O
可靠性
• 唯一的ID 号可以在连错 PMM模块时识别错误 • 通过光纤连接 PACMotion 控制器模块,可以抗干扰 • 24 VDC 电源可以在极性接错的时候保护 • 光电隔离的24V I/O
Read Status
返回轴运动的详细状态
© 2005 GE Fanuc Automation (All Rights Reserved)
20 GE Fanuc FTB VOC
2020/3/4
PACMotion 系统概貌
Proficy ME 编程软件 (Version 5.9 or later)
© 2005 GE Fanuc Automation (All Rights Reserved)
18 GE Fanuc FTB VOC
2020/3/4
强大的运动程序编辑工具
PLCopen 运动功能块
Basic • Read Parameter • Write Parameter • Set Position • Read/Write I/O • Error Reset • Absolute Move • Relative Move • Superimposed Move • Jog • Homing • Stop Advanced • Cam In/Out • Gear In/Out • Gear In Position • Phasing • Synch Start • Delayed Start
2020/3/4
2008年10月7日
PACMotion 正式发布
© 2005 GE Fanuc Automation (All Rights Reserved)
基亏PAC的电机控制器快速控制原型的研究
电 动 汽 车 用 电 机 控 制 器 的 开 发 具 有 小 批 量 、 向不 同 对 面 象 的特 点 , 此对 开 发 方 法 应 具 有 周 期 短 , 本 低 的 特 点 , 因 成 同
1 NI o a t I P mp c O AC 平 台 C R
可 编 程 自动 化 控 制 器 ( A ) 集 计 算 机 技 术 、 P C是 自动 控 制
me o r t e p r n n g e y c r n u t r, i a e r s n h mp e n a in o RCP f rmoo -o t l r h t d f h e ma e tma n ts n h o o smoo t s p p r p e e t t e i lme tt f o h o o tr n r l , c oe b s d o mp c 1 . r v dt a AC b s dRP t o p l a l u l tr o t l r o l crcVe il . a e nCo a t 0 I i p o e t R ts h P - a e C meh d i a p i b e t b i mo o - n r l r e t - h c e S c o d c oef E i Ke r s P y wo d : AC;L b EW P a VI F GA ;mo o t l a i o t lp o oy ig orc n r ;r p d c n r r tt p n o o
p p r rp s sameh dfr a e o o e to o Ra i o t l rttpn ( CP)o trc nrl rb sdOl o a tRI r ga p pd C nr ooy ig R oP fmoo o t l ae iNIC mp c O P rmma l oe . o be Auo t nCo tolr( AC) Af r ec b tmai nrl o e P . t sr e出eathtcuea dfn t n f h ed i r i tr n ci s ePAC,a dteFedO e tdC nrlF c e u o ot n il r ne o t ( OC) h i o
基于虚拟机的PAC控制系统的研究与设计
现 P C控制 系 统高 效采 集大 量信 息 的功 能 。 A 除此 之 外 , 系统 设 计 了 J A T G接 口, 可 以对 既 目标 系统 进 行 测试 , 可 以对 目标 系统 的存 储 单 也
元进 行 编程 。 为 了有 效 地 节 约 显 示 设 备 的 成 本 , 设计 了 V A P C G A K接 口以扩展 V A输 出接 口。 G 3 P C控 制 系统软 件 平 台 A
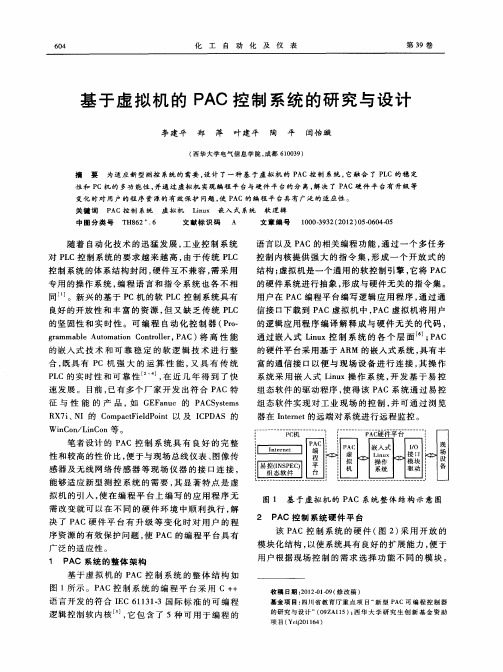
基 于虚 拟 机 的 P C控 制 系统 的整 体 结 构 如 A 图 1 示 。P C控制 系统 的编 程 平 台采 用 C+ 所 A + 语 言开 发 的符合 I C6 1 13国 际标 准 的可 编 程 E 13 . 逻 辑控 制软 内核 , 包 含 了 5种 可 用 于 编 程 的 它
性和 P c机 的 多功 能 性 , 并通 过 虚 拟 机 实现 编程 平 台 与硬 件 平 台 的 分 离 , 决 了 P C硬 件 平 台有 升 级 等 解 A 变 化 时 对 用 户 的 程 序 资 源的 有 效 保 护 问题 , P C 的 编程 平 台 具有 广 泛 的适 应性 。 使 A
依赖 关 系 , m k I g # a ez mae命 令编 译 内核 生 成 要 下 载 到 目标 系 统 的 AR iu M Ln x内 核 映 像 文 件 z I m-
化
工
自 动 化
及
仪 表
第3 9卷
基 于虚 拟 机 的 P C控 制 系统 的研 究 与 设 计 A
李 建平 郑 萍 叶 建平 陶 平 闫怡璇
( 华 大 学 电 气信 息 学 院 , 都 6 0 3 ) 西 成 10 9
摘 要 为 适 应 新 型 测 控 系统 的 需要 , 计 了一 种 基 于 虚 拟 机 的 P C控 制 系统 , 融 合 了 P C的 稳 定 设 A 它 L
基于PAC的测控系统设计与实现
基于PAC的测控系统设计与实现黄定卫;赵新华;赵建伟;周崇阳;黄晓飞【摘要】为实现某化学分析测量仪器自动化测控需求,设计并组建了一套基于工业计算机与可编程自动化控制器(programmable automation controller,PAC)的测控系统;系统上位机通过以太网监控下位机的运行状态,实时显示该仪器中电磁阀开关状态、温度、压力和流量等参数信息;下位机按仪器流程需要设定控制程序,实现对各单元设备的控制和数据采集;并通过设计基于工作流程的数据结构、模块化开发和多线程等技术,编制了系统测控软件;系统具备工作流程定制、数据自动记录、自动报警和自动运行等功能,成功与用于该仪器中;经过多次实验验证和现场工作,测控系统稳定可靠.【期刊名称】《计算机测量与控制》【年(卷),期】2015(023)007【总页数】3页(P2321-2323)【关键词】PAC;控制程序;测控系统;多线程技术【作者】黄定卫;赵新华;赵建伟;周崇阳;黄晓飞【作者单位】西北核技术研究所,西安 710024;西北核技术研究所,西安 710024;西北核技术研究所,西安 710024;西北核技术研究所,西安 710024;西北核技术研究所,西安 710024【正文语种】中文【中图分类】TP3为了满足不断增长的机器和工业控制系统开发需求,处于领先地位的自动化厂商开发出新一代的工业控制器,即可编程自动化控制器(Programmable Automation Controller,PAC),该控制器结合了PC处理器、RAM和软件的优势,以及PLC固有的可靠性、坚固性和分布特性,非常适合于工业环境,具有可伸缩性,易于维护和具有较低的发生故障时间等特性,极大地满足了现代工业应用中愈来愈多的复杂需求。
某化学分析测量仪器,运行过程中有以下需求:1)测量:实时监测、跟踪并记录相关系统的状态参数;2)控制:被控单元控制,可定制控制时序,按控制时序自动或交互控制方式完成系统操作。
运用PAC架构整合Machine Vision与分散式运动控制系统概要
運用P A C架構整合M a c h i n e V i s i o n與分散式運動控制系統「機台自動化暨運動控制」應用論壇INVITATION根據政府2008國家發展重點計劃,規劃推動『兩兆雙星產業』,繼半導體、平面顯示器產業後,機械業可望成為台灣第3個兆元的明星產業。
經濟部選定機械零組件、光電及半導體製程設備以及智慧機器人產業,作為主力機械產業及新興產業,預定3年內輔導建立旗艦型企業,營業額皆達到百億元的水準。
科技日新月異,現今的工廠作業模式已不像早期以人工的經驗來量測及管理工廠事務,隨著圖控軟體與影像監控科技崛起,工廠自動化設備已成為工廠管理者不可或缺的生產利器。
因應巿場的快速變化,TOSEA特別邀請工研院南分院雷射應用科技中心張方副主任與各位分享『雷射技術在光電產業之發展趨勢及應用』,讓各位一窺主力產業的未來面貌;財團法人精密機械中心自控應用部陳瑞琪經理也將分享『服務型機器人產業概況與趨勢』,期望讓各位對於服務型機器人的產業趨勢及相關技術應用有更深入的了解。
研華科技也將於會中分享研華產品在機台自動化領域的應用,其中包含『新世代機台自動化控制系統(PAC)、分散式控制系統解決方案(AMAX 2.0)及利用嵌入式控制平台提升機台穩定度(UNO)』;此外,亦邀請到在機器自動化的合作夥伴前來共襄盛舉,內容涵蓋機器自動化領域的各個解決方案及應用案例分享,期望透過學術與實務的完美結合,找出精密機械業的發展利基,攜手共創亮麗未來。
歡迎蒞臨參加!!台灣光電與半導體設備產業協會理事長余宗澤敬邀【研討會議程】創新體驗:分散式控制系統解決方案新興應用:利用嵌入式控制平台提昇機創新體驗:分散式控制系統解決方案(AMAX 2.0)新興應用:利用嵌入式控制平台提昇機創新體驗:分散式控制系統解決方案(AMAX 2.0) 研華工業自動化事業群主辦單位:台灣光電與半導體設備產業協會、工研院、財團法人精密機械中心 協辦單位:研華科技✂-------------------------------出 席 回 函----------------------------------【TOSEA 會員免費參加;名額有限,額滿為止】為使活動順利,請於96年10月26前,以傳真或E-mail 回函報名。
基于PAC的多轴运动控制系统设计
1 1 6
重 庆 理 工 大 学 学 报
括 G E P A C( p r o g r a m ma b l e a u t o m a t i c c o n t r o 1 )R X 3 i
泛 的适用 性 。这 也 说 明在 运 动 轨 迹 控 制 系统 中 ,
很 多传统 意义 上 的设备 解 决 方案 已经 逐 渐被 以嵌
P ME编程软 件进 行程 序设计 和 i F I X软件进 行 组 态控 制界 面的设 计过 程 。结 果表 明 : 以i F I X和
R X 3 i 控制器分别作为软、 硬件 实现开发界面来对运动 系统进行控制具有较好 的易控性 。
关 键 词: 运 动控 制 ; I F I X组 态软 件 ; 开发界 面 ; 稳 定 性
1 系统 总体 结构
控制 系统 包含 硬 件 和 软件 。硬 件 部 分 主要 包
件 制作 运动 控 制 界 面 的监 控 画 面 组态 , 能 起 到 实
时监控 多轴 运 动状 态 的 目的 一 。系 统 总体 构 成
如 图 1所示 。
F S S B线
自 伺服 驱 动 器
自 伺 服 驱 动 器
( 铜 陵学 院 电气 工程 学 院 , 铜陵 2 4 4 0 0 0 ) 摘 要: 以三轴 运动控 制 系统 为研 究对 象 , 以G E R X 3 i 集成 伺服控 制 系统 为 实验 平 台, 采用
硬件 和软件 设计 相 结合 的方 法进 行 设计 。介 绍 了 R X 3 i 集 成控 制 系统硬 件设 计 , 以及如 何 利 用
2 0 1 7年 4月
Ap r .2 0 1 7
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 4 - 8 4 2 5 ( z ) . 2 0 1 7 . 0 4 . 0 1 9
PAC控制系统的安装调试方法

PAC控制系统的安装调试方法引言控制系统是工业生产过程中必不可少的一部分,而PAC(可编程自动化控制器)控制系统作为一种先进的控制技术,越来越广泛地应用于各个领域。
本文旨在介绍PAC控制系统的安装调试方法,帮助了解PAC控制系统并进行成功的部署和调试。
安装前准备在开始安装PAC控制系统之前,需要做一些准备工作,确保安装过程顺利进行:1. 确定系统需求:了解系统的工作要求和性能指标,从而选择合适的PAC控制器和配套设备。
2. 设计系统拓扑结构:根据实际需求,设计系统的传感器、执行器、网络布线等方案。
3. 准备安装工具和材料:包括螺丝刀、接线器、电缆等工具和材料,确保能够顺利安装、接线和调试。
安装步骤下面是PAC控制系统的安装步骤:1. 安装PAC控制器:根据制造商提供的指南,将PAC控制器安装在合适的位置。
确保控制器固定牢固且通风良好。
2. 连接传感器和执行器:根据系统设计方案,将传感器和执行器正确连接到PAC控制器的输入输出端口。
对于数字输入输出信号,使用合适的接线器和电缆连接。
3. 连接网络:如果PAC控制器需要连接到网络上,使用合适的网络线缆将其连接到网络交换机或路由器。
确保网络配置正确,并测试连接是否正常。
4. 供电测试:连接PAC控制器的电源,确保供电正常。
检查指示灯是否亮起,确认系统能够正常启动。
5. 安装操控面板:根据系统要求,安装操控面板并连接到PAC 控制器。
测试面板是否能够正常与PAC控制器通信。
6. 连接上位机:如果系统需要连接上位机进行程序编程和监控,将上位机连接到PAC控制器的通信口,确保连接正常。
调试方法安装完成后,需要进行系统调试,以确保PAC控制系统正常工作。
下面是一些常用的调试方法:1. 输入输出测试:通过对输入输出信号的测试,验证传感器和执行器的连接是否正确,并测试基本的逻辑控制功能是否正常。
2. 通信测试:测试PAC控制器与上位机、其他设备的通信是否正常。
可使用自带的调试工具或第三方软件进行测试。
PAC
• 开发软件环境: eVC++,/
Industrial Computer Product Data Acquisition System
PAC加值软件简介
• Wincon系列:
–完整软件套件:EzProg-I – EzProg-I
• • • • • • PC端eVC++开发套件:EzHMI/EzCore\EzLIB MA Wincon软件工具: EzConfig/ EzGo/EzMake 可整合轴控&local I/O及remote I/O(FRNet) 系统断电保持参数 AES加密功能 多国语系
7520A7520A->422
Modbus
J2SJ2S-A
变频器
RKC 温控器
一般 IO 拍板 墨轮 板宽
I-8080计数器 8080计数器
Industrial Computer Product Data Acquisition System
PAC Motion应用方案-绕线机 应用方案-
Industrial Computer Product Data Acquisition System
Special Image OS1 Special Image OS2
• 预设出货版本为 Standard Image OS (开机预设语系English),另外随货Recovery DVD 将提供上述三版本之映 像档由客户自由使用 • 凡是非上述三种版本语言或其它客制Image OS之需求, ICP DAS将会依据项目规模收取客制服务费
IEEE 1394
Ethernet
External Trigger
Industrial Computer Product Data Acquisition System
基于PAC的自动控制实验系统设计

6 1 0工控机 内装通用组 态软件 .作为上位 机的人机界 面H MI 或S C A D A. 它们一 起通 过 R S 一 4 8 5串 口. 并 通
作者简介: 李金 春 ( 1 9 6 2 - ) , 副教 授 , 研 究 方 向为 计 算机 技
术及应 用。
图2 A D A M一 5 5 1 0 K W 系统模块化结构 图
Ab s t r a c t : A a u t o ma t i c t e mp e r a t u r e c o n t r o l e x p e ime r n t s y s t e m b a s e d o n P AC i s d e s i g n e d . D AM 一 A 5 51 0 KW ,Au t o v i e w, a n d Mu l t i p r o g s o f t l o g i c s o t f wa r e o f Ge r ma n Kl o p p e r — We i g e r a r e u s e d a s t h e s y s t e ma t i c s o t f wa r e a n d h a r d wa r e p l a t f o r m. A be t t e r t e a c h i n g r e s u l t i s a c h i e v e d . Ke y wo r d s: e x p e ime r n t a l s y s t e m; P AC ; Mu l t i p r o g; Au t o v i e w
De s i g n o f Au t o - Co Sy s t e m Ba s e d o n P AC
L /J i n — Ch u n
利用PAC的教学楼智能化控制系统的设计

利用PAC的教学楼智能化控制系统的设计杨洋;李钟慎【期刊名称】《华侨大学学报(自然科学版)》【年(卷),期】2012(033)005【摘要】This paper introduces an intelligent control system of academic building based on programmable automatic controller (PAC) and supervisory control and data acquisition (SCADA) configuration software. The upper computer u-ses SCADA and iFK configuration software that applies multi thread COM components and the lower computer adopts a Pacsystem Rx3i device, so that users can select and construct the module of the system flexibly. The Genius, Profibus DP and industrial ethernet bus protocol are adopted between the upper computer and lower computer. It communicates by bus network between the central control station and various points control rooms. The designed control system has both automatic and manual switching modes which can be choosed by touch screen.%基于可编程自动化控制器(PAC)和数据采集与监视控制(SCADA)等组态软件,设计教学楼的智能化控制系统.上位机采用SCADA和iFIX组态软件,应用多线程的COM组件;下位机采用Pacsystern Rx3i器件,用户可以灵活选择构建系统所使用的模块;上位机和下位机之间采用Genius,Profibus DP和工业以太网等总线协议,中央控制总站与各个分控室模块通过网络总线进行通信.设计的控制系统有自动和手动两种切换的模式,可通过触摸屏进行选择.【总页数】3页(P481-483)【作者】杨洋;李钟慎【作者单位】华侨大学机电及自动化学院,福建厦门361021;华侨大学机电及自动化学院,福建厦门361021【正文语种】中文【中图分类】TP273.5【相关文献】1.资源集约化的教学楼群设计研究--以成都理工大学教学楼群建筑设计为例 [J], 韩艳林;吴宾2.教学楼设计的思考:兼谈长沙工业学校教学楼设计 [J], 黄纲玫3.关于高校中高层教学楼设计的研究--河北农业大学综合教学楼方案设计 [J], 王广和;任轶蕾;纪江海4.高校教学楼空间多元化设计要素分析r——以某艺术学校教学楼大厅设计为例[J], 傅媛媛5.现代高校教学楼设计的模块化与通用性探讨——谈“湖南文理学院第三教学楼”设计实践的体会 [J], 黄资祥因版权原因,仅展示原文概要,查看原文内容请购买。
基于PAC的运动控制系统方案

基于PAC的运动控制系统方案
图一系统实现框图
多电机伺服控制广泛应用于各种电力传动自动控制系统中,如配料、传动等生产过程。
伺服系统中电机控制性能和多电机间协调控制的好坏直接影响生产过程的质量,如何高效管理、方便应用、实时控制是多电机伺服系统生产领域亟待解决的首要问题。
因此,本文提出一种基于CANOpen 总线技术的多轴运动控制数字交流伺服系统。
现场总线技术解决了传统总线插板I/O 模块多,干扰严重、系统软件编写复杂、系统硬件兼容性差等问题。
大大减轻了现场信号连接的繁琐与费用,提高了信号传输的精度与灵活性,给安装、调试和维护带来诸多方便,为现场用户带来巨大的经济效益,代表着自动化领域发展的一个重要方向。
一、CANOpen 总线简介
CAN 的主要技术特点有:
1.是一种多主总线,网络上任一个节点均可在任意时刻主动向网络上其它节点发送信息,多主站依据优先机制进行总线访问;
2.非破坏性基于优先权总线仲裁技术采用非破坏性基于优先权总线仲裁技术结构,大大节省总线冲突仲裁时间,在重负荷下表现出良好性能;
3.具有多种传送数据功能,具有点对点,一点对多点(成组)及全局广播传送数据功能;
4.节点数目多,直接通讯距离最远可达10km(传输速率为5k ),最高通讯速率可达1M (传输距离为40m);
5.可靠性高,数据链路层采用短帧结构,实时性高,纠错效果好,每帧。
基于GEPAC的多部电梯群控系统设计—软件组态设计说明

基于GE PAC的多部电梯群控系统设计—软件组态摘要随着越来越多的智能大厦拔地而起,电梯在智能建筑中的突出作用也更加被人们重视。
现在的高层楼宇之中,往往需要装多部电梯群,这就需要对电梯进行联合控制,统一调度,提高电梯的服务质量和运行效率。
因此,本课题研究的就是多部电梯的群控系统。
PLC又称可编程逻辑控制器,自诞生以来,就以可靠性而立足于控制行业,成为三大控制支柱之一。
本课题使用的是GE公司的RX3i可编程自动控制器,相比传统的PLC,它更是具有可靠地控制效果,紧凑的模块化结构以与简便的程序化语言。
此外,还用到了触摸屏以与iFix软件进行监控。
本课题主要实现了对三部六层电梯的联合控制,依靠就近响应和优先响应的调度方法,实现了呼优先外呼联控的最终效果。
三部电梯之间的信号传输主要依靠现场总线的方式,具有准确,与时的优点。
此外,触摸屏实现了对电梯运行的实时监控,画面中的软按钮也可以实现呼梯请求,多画面的切换可以更加详细的得知每部电梯的运行情况和呼梯请求。
总之,本课题具有控制稳定,反应快速,运行舒适,调度准确,画面清晰的特点,很好地符合了人们对现代电梯的要求。
关键词:群控系统,PAC,现场总线,触摸屏控制,组态控制Multi Elevator Group Control System Design And Configuration Software Based On PAC Of GEABSTRACTWith more and more prominent role in Intelligent Building erected, elevator in the intelligent building is more and more attention by people. In the present high-rise buildings, there are often need to install many elevators group, which need to carry out joint control of the elevator, unified scheduling, improve the elevator service quality and operation efficiency. Therefore, this topic is to study multi elevator group control system.PLC also known as the programmable logic controller, since the birth of the reliability and based on the industry, become one of the three control pillars. This topic uses GE RX3i programmable automatic controller, compared with the traditional PLC, it is a reliable control effect, compact modular structure and simple procedural language. In addition, the touch screen and iFix software for monitoring. The ultimate effect of three six storey elevator control, rely on the nearest response and response to the priority scheduling method, realized the call priority outbound joint control have been realized in this paper. The signal transmission between the three elevators depends mainly on the field bus, and has the advantages of accurate and timely.. In addition, touch screen to achieve the real-time monitoring of the operation of the elevator, soft button screen can also achieve call request, the switching of multi picture can be more detailed that the operation of each elevator and elevator calling request.In short, this subject has the characteristics of stable control, rapid reaction, comfortable operation, accurate scheduling, clear picture, and well accord with the requirements of modern elevator.KEY WORDS:control system, fieldbus, PAC, touch screen control, configuration control目录前言1第1章概述21.1本课题研究的目的21.2 本课题设计的背景21.3 本课题设计方案31.4 本课题研究的容和主要工作41.4.1 本课题研究的容41.4.2 本课题研究的主要工作4 第2章控制方案52.1 电梯群控系统原理分析52.2 电梯群控系统的功能52.3 电梯群控系统的动态性能分析62.4 群控系统的基本规则7第3章硬件设计93.1 设计思路93.2 设备选型93.2.1 控制器93.2.2 远程模块93.2.3 变频器与电机93.2.4 HMI(人机界面)103.2.5 电源与继电器103.3 总体方案103.4 设备清单113.5 I/O分配表123.6 硬件设计143.6.1 整体布局图143.6.2 PAC与HMI连接图143.6.3 输入输出图143.6.4供电图143.6.5电机控制图14第4章软件设计154.1 程序流程图154.1.1 单梯控制流程图154.1.2 群控流程图154.2 总体程序164.3 触摸屏监控164.3.1 触摸屏硬件配置174.3.2 画面编辑184.3.3 画面下载224.4 iFix组态控制234.4.1 系统配置234.4.2 过程数据库254.4.3 组态画面29第5章系统调试325.1 单梯程序调试325.1.1 单体程序的调试325.1.2 单体组态的调试335.2 群控调试345.2.1 群控程序的调试345.2.2 群控组态的调试35 结论36辞37参考文献38附录39外文资料翻译40前言不知你是否这样想过,假如现代社会没有电梯,那将是怎样的一番情形。
基于PAC控制器的涂装车间机运自动化

基于PAC的交流伺服系统设计

1 系统 整体方案设计
在加 速 器 的束 流诊 断 中需 要 使用 4 块挡 板 构成 宽 度可 控 的狭 缝 来 实 现 对 束 流 的精 确 测量 。本 项
目采 用 4 台 交 流伺 服 电机 带 动4 块 挡 板 ,构 成 高 精 度 的运 动 控 制 系 统 , 实现 高 精 度 的 束 流 狭 缝 控 制 系统 。整个运 动控 制 系统框 图如 图 l 所示。
Au t o ma t i c Ga mma C o u n t e r s [ C ] . Me a s u r i n g T e c h n o l o g y
【 6 O 】 第3 6 卷
第3 期
2 0 1 4 — 0 3 ( 下)
灵 活 的 高精 度 运 动 控 制 系统 ,可 以 适 用 于 工业 级 的应 用 环境 ; 在本 研 究 中在 加 速 器 的实 验 环 境下 测
Th e Ap pl i c a t i o n o f AC Pos i t i o n S e r v o c on t r o l i n
的 高精 度 交流 伺 服 控 制 组 件 , 结 合工 业 级 的 可 编
程 自动化控制器 ( P A C),构建 高精度 、全数字
化 的 闭环运 动控 制 系统 。
具有 位 置/ 转 速控 制 模 式 ,速度/ 力矩 控 制 模式 ,力
收稿 日期:2 0 1 4 - 0 1 -1 0 基金项 目:河南省科技攻关计划项 目:大型振 动筛早期 故障诊断 系统研究 ( 1 3 2 1 0 2 2 1 0 1 0 2 ) 作者简介:杨磊 ( 1 9 8 2一),男 ,河南南阳人 ,讲 师,硕士 ,研 究方 向为 电机运动控制 。
PAC技术现状及应用前景分析

PAC控制技术的解决方案及主要产品从定义可以看出PAC其实是一个系统的概念。它包括了两部分内容:一体化的软件平台和基于开放式模块化结构的硬件平台。PAC技术的解决方案也围绕这两个方面展开。一般来说,有两种提供PAC软件的方式:基于PLC控制的软件和基于PC控制的软件。
PAC技术的发展趋势随着市场的需要,PAC技术在未来的几年内将朝着以下几个方向进一步发展。1)设备规格的多样化。为了满足各种实际生产状况的需要,PAC的规格将会呈现出多样化的发展趋势。在具体的生产环境中,选择合适的控制系统要求的PAC,有利于降低成本。2)支持更多的控制功能。目前,PAC已经将逻辑、运动、过程控制等高级功能集成到了单一的平台上。而未来,PAC将进一步融合更多的功能,例如对于安全性的考虑,批处理等等。当信息被越来越广泛地使用时,其安全性就将成为需要考虑的第一因素。
基于PAC的流量控制系统设计本科毕业设计论文

南阳理工学院本科生毕业设计(论文)学院:电子与电气工程学院专业:自动化学生:陈东东指导教师:刘硕完成日期2009年5月南阳理工学院本科生毕业设计(论文)基于PAC的流量控制系统设计Design of Flow Control System Based on PAC总计:36 页表格:1 个插图:37 幅南阳理工学院本科毕业设计(论文)基于PAC的流量控制系统设计Design of Flow Control System Based on PAC学院:电子与电气工程学院专业:自动化学生姓名:学号:指导教师(职称):评阅教师:完成日期:南阳理工学院Nanyang Institute of Technology基于PAC的流量控制系统设计[摘要]本文基于PACSystems RX3i控制器,以Proficy Machine Edition软件为开发平台,在iFIX上做组态监控的基础上,主要完成对流量控制系统设计。
本设计采用流量传感器采集并反馈流量信号给PID控制器,PID控制器控制变频器的输出频率,从而调节水泵转速实现对流量的控制。
通过对流量控制系统软件的编程和相关硬件调试,系统实现了预定的流量控制。
运行结果表明流量控制的精度达到了设计要求。
[关键词]流量控制;组态监控;程序设计;PID算法Design of Flow Control System Based on PACAbstract: This article is based on PACSystems RX3i controller and uses the Proficy Machine Edition software as a development platform, configures monitoring on iFIX, mainly accomplish the design of flow control system. This design uses a flow sensor to collect and feedback the flow rate to PID controller. PID controller adjusts output of frequency converter, the flow is in control through adjusting speed of water pump according to frequency. By designing flow control system software and debugging hardware, the system realizes the desired flow control. Testing results show that the accuracy of flow control reaches the design requirement.Key Words: Flow control; configuration monitoring; program design; PID algorithm目录1 引言 (1)1.1 研究目的和意义 (1)1.2 过程控制的发展 (1)1.3 本文主要工作 (3)2 控制系统硬件设计 (3)2.1 控制方案 (3)2.2 流量的检测方法 (5)2.3 控制器的选型 (7)2.3.1 电源模块 (8)2.3.2 CPU模块 (8)2.3.3 I/O模块 (9)2.3.4 以太网接口模块 (9)2.3.5 IC695ALG600的参数设置 (10)2.4 变频器 (11)3 iFIX监控设计 (12)3.1 iFIX软件简介 (12)3.2 I/O驱动器 (12)3.3 过程数据库 (14)3.4 组态监控画面 (15)4 PME程序设计 (17)4.1 PME及硬件组态 (17)4.2 通信的建立 (20)4.3 控制算法 (23)4.3.1 PID控制算法 (23)4.3.2 PID参数的整定 (25)4.4 程序流程 (26)4.5 程序调试与运行 (28)结论与展望 (30)参考文献 (31)附录 (32)致谢 (37)1引言本章首先阐明了本文的研究目的与意义,其次论述了过程控制的发展历程、PAC 的优点,最后叙述了流量控制的发展及国内外研究现状及主要工作。
可编程自动化控制器(pac)技术及应用,基础篇

可编程自动化控制器(pac)技术及应用,基础篇
可编程自动化控制器(PAC)是一种硬件系统,用于控制和监测机器和设备,使它们能在指定的时间内和精度条件下完成特定的功能。
PAC具有良好的性能和准确性,在自动化控制方面占有重要地位。
PAC的基本功能是将外部信号与内部计算机数据结合起来,以驱动系统运行特定的任务。
它使用运动控制、过程控制、部件控制和数据采集等一些技术,构成一个全面的控制系统。
PAC控制器被广泛应用于食品、化工、制药、汽车、航空及其他行业。
它可以实现对各种设备的运动控制、检测及报警功能等。
例如,在食品行业中,它可以用于控制生产线的各种动作和过程,检测产品的质量等;在汽车行业,它可以用于控制汽车的发动机、排气量、发动机转矩、电子控制系统等;在航空行业,它可以用于控制飞机的各项动作和过程。
总之,PAC技术在工业自动化控制中发挥着非常重要的作用,能够有效提高生产力,改善生产的质量和效率,为用户提供更高的性能和更低的成本,更省时省力。
基于图形开发系统的网络化PAC控制器设计

基于图形开发系统的网络化PAC控制器设计随着工业自动化水平的不断提高,计算机技术在工业控制领域的应用越来越广泛。
其中,可编程自动控制器(Programmable Automation Controller,PAC)作为一种新型的控制器,具有高性能、高可靠性和高扩展性等优点,被广泛应用于工业控制系统中。
然而,传统的PAC控制器存在一些问题,如单点故障、通信复杂、编程复杂等,这些问题限制了PAC控制器的应用范围。
为了解决这些问题,本文提出了一种基于图形开发系统的网络化PAC控制器设计方案。
网络化PAC控制器是指多个PAC控制器通过网络连接,共同完成控制任务。
在这种方案中,每个PAC控制器既可以独立运行,也可以与其他PAC控制器协同工作,实现分布式控制。
通过网络化的设计,可以提高系统的可靠性和扩展性。
图形开发系统是网络化PAC控制器设计的关键技术。
传统的PAC控制器需要通过编程语言进行控制策略的开发,编程复杂且容易出错。
而图形开发系统采用图形化界面,通过拖拽和连接不同的图形模块来完成控制策略的开发,简化了开发过程,降低了错误的发生概率。
基于图形开发系统的网络化PAC控制器设计方案包括以下几个步骤:首先,搭建网络基础设施,包括网络拓扑结构和通信协议等;其次,设计PAC控制器的硬件架构,包括处理器、存储器和输入输出接口等;然后,开发图形开发系统的软件平台,包括图形模块库和图形编辑器等;最后,设计控制策略,通过连接图形模块来实现控制功能。
通过实验验证,基于图形开发系统的网络化PAC控制器设计方案具有较好的性能。
实验结果表明,该方案可以提高系统的可靠性和扩展性,减少编程复杂度和错误率,提高工业控制系统的自动化水平。
综上所述,基于图形开发系统的网络化PAC控制器设计方案是一种有效的解决方案,可以提高工业控制系统的性能和可靠性。
随着技术的不断发展,网络化PAC控制器将在工业自动化领域得到更广泛的应用。
基于PAC的预测控制算法研究及改进的开题报告

基于PAC的预测控制算法研究及改进的开题报告一、研究背景与意义预测控制是现代控制理论中的一种重要方法,它是一个综合性的控制策略,可用于多变量、非线性、时变和不确定的系统控制。
而基于模型的预测控制方法是其中最为广泛应用的一种方法,其基本思想是将系统建模成一个数学模型,并通过对模型的预测和优化控制,实现对系统的控制。
PAC(Predictive Analog Control)是基于模型的预测控制方法中的一种,是由机电部分仿真技术与经典的预测控制技术相结合的方法。
PAC 方法在许多领域都有广泛的应用,如化工、航天、机械等领域。
然而,PAC方法在大规模系统的控制中存在计算量大、实时性差等问题。
为此,需要对PAC方法进行研究和改进,以满足大规模系统的实时控制需求。
二、研究内容和研究目标本文将研究基于PAC的预测控制算法,并通过对算法进行改进提高其实时性能。
具体内容包括:1. 建立预测模型。
利用机电部分仿真技术和经典预测控制方法建立系统的数学预测模型。
2. PAC控制算法研究。
通过对PAC控制算法进行研究,分析其结构和特点。
进而针对其中存在的问题进行优化。
3. 改进PAC算法。
针对PAC方法中存在的计算量大、实时性差等问题,提出改进的算法方案。
4. 算法仿真验证。
利用仿真工具对所提出的算法进行验证,评估算法性能,验证改进算法的有效性。
本研究旨在提高基于PAC的预测控制方法的实时性能,为大规模系统的控制提供更加有效的方法和技术支持。
三、研究方法和技术路线本文将通过文献资料查阅、模型建立和算法仿真等方法,研究基于PAC的预测控制算法。
具体研究技术路线如下:1. 文献资料查阅:对PAC算法的相关文献资料进行查阅综述,了解相关研究方向和发展。
2. 建立预测模型:使用机电部分仿真技术和经典预测控制方法建立系统的数学预测模型。
3. PAC控制算法研究:对PAC方法进行研究,分析其结构和特点。
针对其中存在的问题进行优化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PAC运动控制系统方案
多电机伺服控制广泛应用于各种电力传动自动控制系统中,如配料、传动等生产过程。
伺服系统中电机控制性能和多电机间协调控制的好坏直接影响生产过程的质量,如何高效管理、方便应用、实时控制是多电机伺服系统生产领域亟待解决的首要问题。
因此,本文提出一种基于CANOpen 总线技术的多轴运动控制数字交流伺服系统。
现场总线技术解决了传统总线插板I/O 模块多,干扰严重、系统软件编写复杂、系统硬件兼容性差等问题。
大大减轻了现场信号连接的繁琐与费用,提高了信号传输的精度与灵活性,给安装、调试和维护带来诸多方便,为现场用户带来巨大的经济效益,代表着自动化领域发展的一个重要方向。
一、CANOpen 总线简介
CAN 的主要技术特点有:
1.是一种多主总线,网络上任一个节点均可在任意时刻主动向网络上其它节点发送信息,多主站依据优先机制进行总线访问;
2.非破坏性基于优先权总线仲裁技术采用非破坏性基于优先权总线仲裁技术结构,大大节省总线冲突仲裁时间,在重负荷下表现出良好性能;
3.具有多种传送数据功能,具有点对点,一点对多点(成组)及全局广播传送数据功能;
4.节点数目多,直接通讯距离最远可达10km(传输速率为5k),最高通讯速率可达1M(传输距离为40m);
5.可靠性高,数据链路层采用短帧结构,实时性高,纠错效果好,每帧信息都有CRC 校验及其它校验措施,数据出错率低,可靠性高;
6.故障自动判别,发送期间若丢失仲裁或因出错而遭破坏的帧可自动重发,暂时错误和永久性故障节点判别及故障节点自动脱离CAN 总线。