MA8110中文资料
LM1085中文手册
LM10853A低压降正稳压器简单说明:LM1085是一个低压差正向电压系列,是3A电流的负载与1.5V的最大压差的稳压器。
与国家半导体公司的行业标准的LM317具有相同的引脚。
LM1085是可调版本,它可以只有两个外部电阻设置输出电压。
也可用三个固定电压:3.3V,5.0V和12.0V。
固定版本用整合调整电阻。
LM1085电路包括一个齐纳修剪带隙基准,电流限制和热关机。
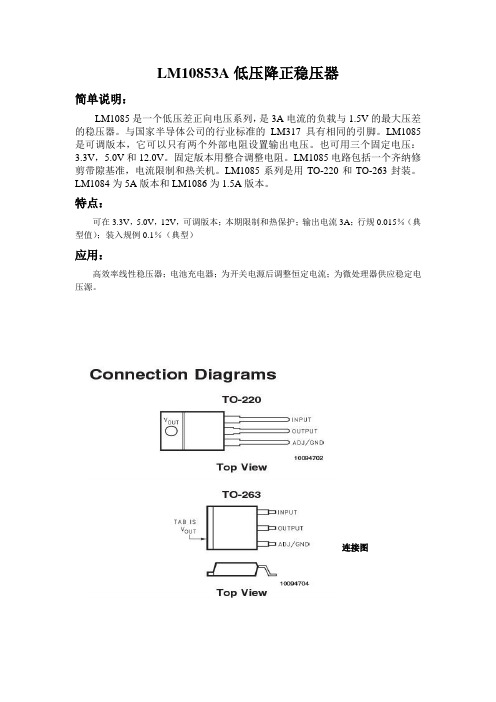
LM1085系列是用TO-220和TO-263封装。
LM1084为5A版本和LM1086为1.5A版本。
特点:可在3.3V,5.0V,12V,可调版本;本期限制和热保护;输出电流3A;行规0.015%(典型值);装入规例0.1%(典型)应用:高效率线性稳压器;电池充电器;为开关电源后调整恒定电流;为微处理器供应稳定电压源。
连接图实际应用图:基本功能框图:可调版本数据名称:PACKAGE(封装):TOP-220 TOP-263是封装尺寸Temperature Range(温度范围)Transport Media(传输介质)Tape and Reel(卷带式封装)Rails(导轨式封装)简化原理图:Absolute Maximum Ratings(最大额定值)(绝对最大额定值表明界限,可能会出现损坏设备。
经营评价显示设备的条件拟功能,但不能保证具体表现。
为保证规范和测试条件,见电气特性。
): Maximum Input to Output Voltage Differential(最大输入输出电压差)LM1085-ADJ 29VLM1085-12 18VLM1085-3.3 27VLM1085-5.0 25VPower Dissipation Internally Limited(功耗内部限制)(电流限制电路的功耗保持在安全范围内。
请参考应用笔记超载恢复。
) Junction Temperature (TJ)(结温)(最大功耗是TJ(MAX),θJA,和助教的功能。
DMC1380用户手册V2.0
2.1.1 电机控制指标 ............................................................................................................. 3 2.1.2 I/O 信号控制指标 ...................................................................................................... 3 2.1.3 通用指标 ..................................................................................................................... 4
2.2 2.3
硬件结构尺寸 ..................................................................................................... 4 硬件功能描述 ..................................................................................................... 5
4
软件系统概述 .................................................................................................. 20
LM9810资料
Electrical Characteristics
The following specifications apply for AGND=DGND=0V, VA=VD=+5.0VDC, fMCLK=24MHz, Rs=25Ω. Boldface limits apply for TA=TJ=TMIN to TMAX; all other limits TA=TJ=25°C. (Notes 7, 8, & 12) Symbol Parameter Conditions Typical (Note 9) Limits (Note 10) Units (Limits)
Positive Supply Voltage With Respect to GND=AGND=DGND Voltage On Any Input or Output Pin Input Current at any pin (Note 3) Package Input Current (Note 3) Package Dissipation at TA = 25°C ESD Susceptibility (Note 5) Human Body Model Soldering Information Infrared, 10 seconds (Note 6) Storage Temperature (V+=VA=VD) 6.5V -0.3V to V++0.3V ±25mA ±50mA (Note 4) 2000V 300°C -65°C to +150°C
CCD/CIS Source Requirements for Full Specified Accuracy and Dynamic Range (Note 12) VOS PEAK Sensor’s Maximum Peak Differential Signal Range Gain = 0.933 Gain = 3.0 Gain = 9.0 2.1 0.65 0.21 V V V
FPGA可编程逻辑器件芯片10M08SCE144I7G中文规格书

7 BK7DS (R/W)
Bank 7 Deep Sleep Enable. The L2CTL_PCTL.BK7DS bits enables bank 7 deep sleep.
6 BK6DS (R/W)
Bank 6 Deep Sleep Enable. The L2CTL_PCTL.BK6DS bits enables bank 6 deep sleep.
Figure 11-26: L2CTL_SCNT Register Diagram
Table 11-32: L2CTL_SCNT Register Fields
Bit No. (Access)
Bit Name
17:0 VALUE (R/W)
Description/Enumeration
Scrub Count. The L2CTL_SCNT.VALUE bits determines the number of 64-bit locations scrubbed starting from the start address. Ensure value programmed is less than the total addressable 64-bit L2 RAM locations available.
17 BK1SD (R/W)
Bank 1 Shut Down Enable. The L2CTL_PCTL.BK1SD bits enables bank 1 shut down.
16 BK0SD (R/W)
Bank 0 Shut Down Enable. The L2CTL_PCTL.BK0SD bits enables bank 0 shut down.
PA8110A称重显示器使用说明书

浙制00000583号
屏蔽 J1 3. 盘装式安装示意图 J2
AC220V
仪表面框
仪表盘
安装顶杆
仪表
4. 接线 4.1 现场布线的技术要求 由称重传感器到显示器及由显示器输出的标准模拟量信号线应选用屏蔽电缆。屏蔽电缆的 屏蔽层在显示器一端单端接地。屏蔽电缆不能与动力电源线布置在同一走线槽内,应采用单独 的金属穿线管走线。信号电缆最好不要与动力电源线平行布线,若无法避免平行布置时,两者 应保持 200mm 以上的间隙。 4.2 称重传感器接线
PA8110A
称 重 显 示 器
外 商 独 资 余 姚 太 平 洋 称 重 工 程 有 限 公 司
地址:浙江省余姚市谭家岭东路50号 电话:(0574)62730166 62730188 传真:(0574)62730155 62730178 E-mail:pacells@ 邮政编码:315400
5k准确度02fs22串行通讯口接口形式rs232crs485rs422profibusdp可选波特率300bit600bit200bit2400bit4800bit9600bit可选数据格式7位数据偶校验地址026可选232路继电器输出接口输出为常开触点250v5a24显示器5位红色08英寸led数码管外形尺寸6080270宽高深开孔尺寸52外形尺寸28222805宽高深安装尺寸见图电源电压ac220v22v33v频率50hzhz62温度04063湿度402090rh64无腐蚀性气体和强电磁场干扰场合自动标定和手动标定功能72菜单方式各种参数设定和选择功能73可编程数字滤波功能74自动调零功能75飘移跟踪功能76可编程称量控制功能77完善的自检功能三前后面板布置安装接线前面板布置示意图8110a运行切换设定启动停机465现场布线的技术要求由称重传感器到显示器及由显示器输出的标准模拟量信号线应选用屏蔽电缆
VCA810中文资料资料
V C A810中文资料VCA810高增益调节范围,宽带,可变增益放大器VCA810特点:1、高增益调节范围:±40分贝2、微分/单端输出3、低输入噪声电压:2.4nV/√Hz的4、恒定带宽与增益:达到35MHz5、较高的分贝/ V的增益线性度:±0.3分贝6、增益控制带宽:25MHz的7、低输出直流误差:<±40mv8、高输出电流:±60毫安9、低电源电流:24.8毫安(最大为-40° C至+85° C温度范围)主要应用领域:光接收器时间增益控制、声纳系统、电压可调主动滤波器、对数放大器、脉冲振幅补偿、带有RSSI的AGC接收机、改善更换为VCA610芯片描述:VCA810是直流耦合,宽带,连续可变电压控制增益放大器。
它提供了差分输入单端输出转换,用来改变高阻抗的增益控制输入超过- 40DB增益至+40 dB的范围内成dB/ V的线性变化。
从±5V电源工作,将调整为VCA810的增益控制电压在0V输入- 40DB增益在-2V输入到+40 dB。
增加地面以上的控制电压将衰减超过80dB的信号路径。
信号带宽和压摆率保持在整个增益的不断调整range.This40分贝/ V的增益控制精确到±1.5分贝(±0.9分贝高档),允许在一个AGC应用的增益控制电压为接收使用信号强度指示器(RSSI)的精度为±1.5分贝。
出色的共模抑制,并在两个高阻抗输入的共模输入范围,允许VCA810提供差分接收器的操作与增整。
以地为参考的输出信号。
零差分输入电压,给出了一个很小的直流偏移误差0V输出。
低输入噪声电压,确保在最高增益设置好输出信噪比。
在实际应用中,脉冲前沿的信息是至关重要的,和正在使用的VCA810,以平衡不同的信道损耗,群延迟变化最小增益设置将保留优秀的脉冲边沿信息。
一种改进的输出阶段提供足够的输出电流来驱动最苛刻的负载。
LM10中文资料

LM10Operational Amplifier and Voltage ReferenceGeneral DescriptionThe LM10series are monolithic linear ICs consisting of a precision reference,an adjustable reference buffer and an independent,high quality op amp.The unit can operate from a total supply voltage as low as 1.1V or as high as 40V,drawing only 270µA.A complemen-tary output stage swings within 15mV of the supply termi-nals or will deliver ±20mA output current with ±0.4V satura-tion.Reference output can be as low as 200mV.The circuit is recommended for portable equipment and is completely specified for operation from a single power cell.In contrast,high output-drive capability,both voltage and current,along with thermal overload protection,suggest it in demanding general-purpose applications.The device is capable of operating in a floating mode,inde-pendent of fixed supplies.It can function as a remote com-parator,signal conditioner,SCR controller or transmitter foranalog signals,delivering the processed signal on the same line used to supply power.It is also suited for operation in a wide range of voltage-and current-regulator applications,from low voltages to several hundred volts,providing greater precision than existing ICs.This series is available in the three standard temperature ranges,with the commercial part having relaxed limits.In ad-dition,a low-voltage specification (suffix “L”)is available in the limited temperature ranges at a cost savings.Featuresn input offset voltage: 2.0mV (max)n input offset current:0.7nA (max)n input bias current:20nA (max)n reference regulation:0.1%(max)n offset voltage drift:2µV/˚C nreference drift:0.002%/˚CConnection and Functional DiagramsMetal Can Package (H)DS005652-1Order Number LM10BH,LM10CH,LM10CLH or LM10H/883available per SMA #5962-8760401See NS Package Number H08ASmall Outline Package (WM)DS005652-17Order Number LM10CWM See NS Package Number M14BDual-In-Line Package (N)DS005652-15Order Number LM10CN or LM10CLN See NS Package Number N08EDS005652-16May 1998LM10Operational Amplifier and Voltage Reference©1999National Semiconductor CorporationDS005652Absolute Maximum Ratings(Notes1,8) If Military/Aerospace specified devices are required, please contact the National Semiconductor Sales Office/ Distributors for availability and specifications.LM10/LM10B/LM10BL/LM10C LM10CL Total Supply Voltage45V7V Differential Input Voltage(Note2)±40V±7V Power Dissipation(Note3)internally limited Output Short-circuit Duration(Note4)continuous Storage-Temp.Range−55˚C to+150˚C Lead Temp.(Soldering,10seconds)Metal Can300˚CLead Temp.(Soldering,10seconds)DIP260˚CVapor Phase(60seconds)215˚CInfrared(15seconds)220˚CSee AN-450“Surface Mounting Methods and Their Effect on Product Reliability”for other methods of soldering surface mount devices.ESD rating is to be determined.Maximum Junction TemperatureLM10150˚C LM10B100˚C LM10C85˚COperating RatingsPackage Thermal ResistanceθJAH Package150˚C/WN Package87˚C/W WM Package90˚C/W θJCH Package45˚C/WElectrical CharacteristicsT J=25˚C,T MIN≤T J≤T MAX(Boldface type refers to limits over temperature range)(Note5)Parameter Conditions LM10/LM10B LM10C UnitsMin Typ Max Min Typ MaxInput offset voltage0.3 2.00.5 4.0mV3.0 5.0mV Input offset current0.250.70.4 2.0nA (Note6) 1.5 3.0nA Input bias current10201230nA3040nA Input resistance250500150400kΩ150115kΩLarge signal voltage V S=±20V,I OUT=012040080400V/mV gain V OUT=±19.95V8050V/mV V S=±20V,V OUT=±19.4V5013025130V/mVI OUT=±20mA(±15mA)2015V/mVV S=±0.6V(0.65V),I OUT=±2mA 1.5 3.0 1.0 3.0V/mVV OUT=±0.4V(±0.3V),V CM=−0.4V0.50.75V/mV Shunt gain(Note7) 1.2V(1.3V)≤V OUT≤40V,14331033V/mV R L=1.1kΩ0.1mA≤I OUT≤5mA66V/mV1.5V≤V+≤40V,R L=250Ω825625V/mV0.1mA≤I OUT≤20mA44V/mV Common-mode−20V≤V CM≤19.15V(19V)9310290102dB rejection V S=±20V8787dB Supply-voltage−0.2V≥V−≥−39V90968796dB rejection V+=1.0V(1.1V)8484dB1.0V(1.1V)≤V+≤39.8V9610693106dBV−=−0.2V9090dB Offset voltage drift 2.0 5.0µV/˚C Offset current drift 2.0 5.0pA/˚C Bias current drift T C<100˚C6090pA/˚C Line regulation 1.2V(1.3V)≤V S≤40V0.0010.0030.0010.008%/V 0≤I REF≤1.0mA,V REF=200mV0.0060.01%/V2Electrical Characteristics(Continued)T J=25˚C,T MIN≤T J≤T MAX(Boldface type refers to limits over temperature range)(Note5)Parameter Conditions LM10/LM10B LM10C UnitsMin Typ Max Min Typ MaxLoad regulation0≤I REF≤1.0mA0.010.10.010.15% V+−V REF≥1.0V(1.1V)0.150.2% Amplifier gain0.2V≤V REF≤35V50752570V/mV2315V/mV Feedback sense195200205190200210mV voltage194206189211mV Feedback current20502275nA6590nA Reference drift0.0020.003%/˚C Supply current270400300500µA500570µA Supply current change 1.2V(1.3V)≤V S≤40V15751575µAElectrical CharacteristicsT J=25˚C,T MIN≤T J≤T MAX(Boldface type refers to limits over temperature range)(Note5)Parameter Conditions LM10BL LM10CL UnitsMin Typ Max Min Typ MaxInput offset voltage0.3 2.00.5 4.0mV3.0 5.0mV Input offset current0.10.70.2 2.0nA (Note6) 1.5 3.0nA Input bias current10201230nA3040nA Input resistance250500150400kΩ150115kΩLarge signal voltage V S=±3.25V,I OUT=06030040300V/mV gain V OUT=±3.2V4025V/mV V S=±3.25V,I OUT=10mA1025525V/mVV OUT=±2.75V43V/mVV S=±0.6V(0.65V),I OUT=±2mA 1.5 3.0 1.0 3.0V/mVV OUT=±0.4V(±0.3V),V CM=−0.4V0.50.75V/mV Shunt gain(Note7) 1.5V≤V+≤6.5V,R L=500Ω830630V/mV0.1mA≤I OUT≤10mA44V/mV Common-mode−3.25V≤V CM≤2.4V(2.25V)8910280102dB rejection V S=±3.25V8374dB Supply-voltage−0.2V≥V−≥−5.4V86968096dB rejection V+=1.0V(1.2V)8074dB1.0V(1.1V)≤V+≤6.3V9410680106dBV−=0.2V8874dB Offset voltage drift 2.0 5.0µV/˚C Offset current drift 2.0 5.0pA/˚C Bias current drift6090pA/˚C Line regulation 1.2V(1.3V)≤V S≤6.5V0.0010.010.0010.02%/V 0≤I REF≤0.5mA,V REF=200mV0.020.03%/V Load regulation0≤I REF≤0.5mA0.010.10.010.15% V+−V REF≥1.0V(1.1V)0.150.2%3Electrical Characteristics(Continued)T J=25˚C,T MIN≤T J≤T MAX(Boldface type refers to limits over temperature range)(Note5)Parameter Conditions LM10BL LM10CL UnitsMin Typ Max Min Typ Max Amplifier gain0.2V≤V REF≤5.5V30702070V/mV2015V/mV Feedback sense voltage195200205190200210mV194206189211mV Feedback current20502275nA6590nA Reference drift0.0020.003%/˚C Supply current260400280500µA500570µA Note1:Absolute Maximum Ratings indicate limits beyond which damage to the device may occur.Operating Ratings indicate conditions for which the device is func-tional,but do not guarantee specific performance limits.Note2:The Input voltage can exceed the supply voltages provided that the voltage from the input to any other terminal does not exceed the maximum differential input voltage and excess dissipation is accounted for when V IN<V−.Note3:The maximum,operating-junction temperature is150˚C for the LM10,100˚C for the LM10B(L)and85˚C for the LM10C(L).At elevated temperatures,devices must be derated based on package thermal resistance.Note4:Internal thermal limiting prevents excessive heating that could result in sudden failure,but the IC can be subjected to accelerated stress with a shorted output and worst-case conditions.Note5:These specifications apply for V−≤V CM≤V+−0.85V(1.0V),1.2V(1.3V)<V S≤V MAX,V REF=0.2V and0≤I REF≤1.0mA,unless otherwise specified:V MAX=40V for the standard part and6.5V for the low voltage part.Normal typeface indicates25˚C limits.Boldface type indicates limits and altered test conditions for full-temperature-range operation;this is−55˚C to125˚C for the LM10,−25˚C to85˚C for the LM10B(L)and0˚C to70˚C for the LM10C(L).The specifications do not include the effects of thermal gradients(τ1≅20ms),die heating(τ2≅0.2s)or package heating.Gradient effects are small and tend to offset the electrical error(see curves).Note6:For T J>90˚C,I OS may exceed1.5nA for V CM=V−.With T J=125˚C and V−≤V CM≤V−+0.1V,I OS≤5nA.Note7:This defines operation in floating applications such as the bootstrapped regulator or two-wire transmitter.Output is connected to the V+terminal of the IC and input common mode is referred to V−(see typical applications).Effect of larger output-voltage swings with higher load resistance can be accounted for by adding the positive-supply rejection error.Note8:Refer to RETS10X for LM10H military specifications.Definition of TermsInput offset voltage:That voltage which must be applied between the input terminals to bias the unloaded output in the linear region.Input offset current:The difference in the currents at the in-put terminals when the unloaded output is in the linear re-gion.Input bias current:The absolute value of the average of the two input currents.Input resistance:The ratio of the change in input voltage to the change in input current on either input with the other grounded.Large signal voltage gain:The ratio of the specified output voltage swing to the change in differential input voltage re-quired to produce it.Shunt gain:The ratio of the specified output voltage swing to the change in differential input voltage required to produce it with the output tied to the V+terminal of the IC.The load and power source are connected between the V+and V−ter-minals,and input common-mode is referred to the V−termi-nal.Common-mode rejection:The ratio of the input voltage range to the change in offset voltage between the extremes.Supply-voltage rejection:The ratio of the specified supply-voltage change to the change in offset voltage be-tween the extremes.Line regulation:The average change in reference output voltage over the specified supply voltage range.Load regulation:The change in reference output voltage from no load to that load specified.Feedback sense voltage:The voltage,referred to V−,on the reference feedback terminal while operating in regula-tion.Reference amplifier gain:The ratio of the specified refer-ence output change to the change in feedback sense voltage required to produce it.Feedback current:The absolute value of the current at the feedback terminal when operating in regulation.Supply current:The current required from the power source to operate the amplifier and reference with their out-puts unloaded and operating in the linear range.4Typical Performance Characteristics(Op Amp)Input CurrentDS005652-18Common Mode LimitsDS005652-19Output Voltage DriftDS005652-20Input Noise VoltageDS005652-21DC Voltage GainDS005652-22TransconductanceDS005652-23Output SaturationCharacteristicsDS005652-24Output SaturationCharacteristicsDS005652-25Output SaturationCharacteristicsDS005652-26 5Typical Performance Characteristics (Op Amp)(Continued)Minimum Supply VoltageDS005652-27Minimum Supply VoltageDS005652-28Minimum Supply VoltageDS005652-29Frequency Response DS005652-30Output Impedance DS005652-31Typical Stability RangeDS005652-32Large Signal ResponseDS005652-33Comparator Response Time For Various Input OverdrivesDS005652-34Comparator Response Time For Various Input OverdrivesDS005652-35 6Typical Performance Characteristics (Op Amp)(Continued)Follower Pulse ResponseDS005652-36Noise RejectionDS005652-37Rejection Slew LimitingDS005652-38Supply CurrentDS005652-39Thermal Gradient FeedbackDS005652-40Thermal Gradient Cross-couplingDS005652-41Shunt Gain DS005652-42Shunt Gain DS005652-43Shunt GainDS005652-447Typical Performance Characteristics (Reference)Typical Applications (Note 10)(Pin numbers are for devices in 8-pin packages)Op Amp Offset AdjustmentLine RegulationDS005652-45Load RegulationDS005652-46Reference Noise VoltageDS005652-47Minimum Supply Voltage DS005652-48Output Saturation DS005652-49Typical Stability RangeDS005652-50StandardDS005652-51Limited RangeDS005652-52Limited Range With BoostedReferenceDS005652-53 8Typical Applications (Note 10)(Pin numbers are for devices in 8-pin packages)(Continued)Positive Regulators (Note 9)Low VoltageDS005652-54Best Regulation DS005652-55Zero OutputDS005652-56Note 9:Use only electrolytic output capacitors.Current Regulator DS005652-57Shunt RegulatorDS005652-58Required For Capacitive LoadingNegative Regulator DS005652-59*ElectrolyticPrecision RegulatorDS005652-609Typical Applications(Note10)(Pin numbers are for devices in8-pin packages)(Continued)Laboratory Power SupplyDS005652-61 *V OUT=10−4R3HV RegulatorDS005652-62DS005652-8410Typical Applications (Note 10)(Pin numbers are for devices in 8-pin packages)(Continued)Protected HV RegulatorDS005652-63Flame Detector DS005652-64*800˚C Threshold Is Established By Connecting Balance To V REF .Light Level SensorDS005652-65*Provides HysteresisRemote Amplifier DS005652-66Remote Thermocouple AmplifierDS005652-6711Typical Applications(Note10)(Pin numbers are for devices in8-pin packages)(Continued)Transmitter for Bridge SensorDS005652-68Precision Thermocouple TransmitterDS005652-69 10mA≤I OUT≤50mA500˚C≤T P≤1500˚C*Gain Trim12Typical Applications (Note 10)(Pin numbers are for devices in 8-pin packages)(Continued)Resistance Thermometer TransmitterDS005652-70Optical PyrometerDS005652-71††Level-shift Trim*Scale Factor Trim †Copper Wire WoundThermocouple Transmitter DS005652-72200˚C ≤T p ≤700˚C 1mA ≤I OUT ≤5mA †Gain TrimLogarithmic Light SensorDS005652-731mA ≤I OUT ≤5mA ‡50µA ≤I D ≤500µA ††Center Scale Trim †Scale Factor Trim *Copper Wire Wound13Typical Applications (Note 10)(Pin numbers are for devices in 8-pin packages)(Continued)Battery-level IndicatorDS005652-74Battery-threshold IndicatorDS005652-75Single-cell Voltage Monitor DS005652-76Flashes Above 1.2V Rate Increases With VoltageDouble-ended Voltage MonitorDS005652-77Flash Rate IncreasesAbove 6V and Below 15VMeter AmplifierDS005652-78INPUT 10mV,100nA FULL-SCALE 14Typical Applications(Note10)(Pin numbers are for devices in8-pin packages)(Continued)ThermometerDS005652-79*Trim For Span†Trim For ZeroLight MeterDS005652-801≤λ/λ0≤10515Typical Applications(Note10)(Pin numbers are for devices in8-pin packages)(Continued)Microphone AmplifierDS005652-81Z OUT z680Ω@5kHzA V≤1kf1z100Hzf2z5kHzR L z500*Max Gain TrimIsolated Voltage SensorDS005652-82†Controls“Loop Gain”*Optional Frequency Shaping16Typical Applications (Note 10)(Pin numbers are for devices in 8-pin packages)(Continued)Note 10:Circuit descriptions available in application note AN-211.Application HintsWith heavy amplifier loading to V −,resistance drops in the V −lead can adversely affect reference regulation.Lead resistance can approach 1Ω.Therefore,the common to the reference circuitry should be connected as close as possible to the package.Light-level ControllerDS005652-8317Operational Amplifier Schematic(Pin numbers are for 8-pin packages)D S 005652-13 18Reference and Internal Regulator(Pin numbers are for 8-pin packages)D S 005652-1419Physical Dimensions inches(millimeters)unless otherwise notedMetal Can Package(H)Order Number LM10BH,LM10CH,LM10CLH or LM10H/883NS Package Number H08AS.O.Package(WM)Order Number LM10CWMNS Package Number M14B20Physical Dimensions inches(millimeters)unless otherwise noted(Continued)LIFE SUPPORT POLICYNATIONAL’S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORTDEVICES OR SYSTEMS WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT OF NATIONALSEMICONDUCTOR CORPORATION.As used herein:1.Life support devices or systems are devices orsystems which,(a)are intended for surgical implantinto the body,or(b)support or sustain life,andwhose failure to perform when properly used inaccordance with instructions for use provided in thelabeling,can be reasonably expected to result in asignificant injury to the user.2.A critical component is any component of a lifesupport device or system whose failure to performcan be reasonably expected to cause the failure ofthe life support device or system,or to affect itssafety or effectiveness.National SemiconductorCorporationAmericasTel:1-800-272-9959Fax:1-800-737-7018Email:support@National SemiconductorEuropeFax:+49(0)180-5308586Email:europe.support@Deutsch Tel:+49(0)180-5308585English Tel:+49(0)180-5327832Français Tel:+49(0)180-5329358Italiano Tel:+49(0)180-5341680National SemiconductorAsia Pacific CustomerResponse GroupTel:65-2544466Fax:65-2504466Email:sea.support@National SemiconductorJapan Ltd.Tel:81-3-5639-7560Fax:81-3-5639-7507 Dual-In-Line Package(N)Order Number LM10CN or LM10CLNNS Package Number N08ELM10OperationalAmplifierandVoltageReference National does not assume any responsibility for use of any circuitry described,no circuit patent licenses are implied and National reserves the right at any time without notice to change said circuitry and specifications.元器件交易网。
QSH2818家族移动控制器手册说明书

QMot QSH2818 familyManualV1.042010-OCT-19Trinamic Motion Control GmbH & Co. KGSternstraße 67D – 20357 Hamburg, GermanyTable of contents1Life support policy (3)2Features (4)3Order codes (5)4Mechanical dimensions (6)4.1Lead wire configuration (6)4.2Dimensions (6)5Torque figures (7)5.1Motor QSH2818-32-07-006 (7)5.2Motor QSH2818-51-07-012 (7)6Considerations for operation (8)6.1Choosing the best fitting motor for an application (8)6.1.1Determining the maximum torque required (8)6.2Motor current setting (9)6.2.1Choosing the optimum current setting (9)6.2.2Choosing the standby current (9)6.3Motor driver supply voltage (10)6.3.1Determining if the given driver voltage is sufficient (10)6.4Back EMF (BEMF) (11)6.5Choosing the commutation scheme (11)6.5.1Fullstepping (12)6.5.1.1Avoiding motor resonance in fullstep operation (12)6.6Optimum motor settings (12)6.6.1Settings for the TRINAMIC TMCL™ modules (12)7Revision history (13)7.1Documentation revision (13)8References (14)List of figuresFigure 4.1: Lead wire configuration (6)Figure 4.2: Dimensions (all values in mm) (6)Figure 5.1: QSH2818-32-07-006 speed vs. torque characteristics (7)Figure 5.2: QSH2818-51-07-012 speed vs. torque characteristics (7)List of tablesTable 2.1: Motor technical data (4)Table 4.1: Lead wire configuration (6)Table 6.1: Motor current settings (9)Table 6.2: Driver supply voltage considerations (10)Table 6.3: Comparing microstepping and fullstepping (11)Table 6.4: Optimum motor settings (12)Ta ble 5.5: Optimum motor settings for TMCL™ modules (tested with TMCM-110) (12)Table 6.1: Documentation revision (13)1Life support policy TRINAMIC Motion Control GmbH & Co. KG does not authorize or warrant any of its products for use in life support systems, without the specific written consent of TRINAMIC Motion Control GmbH & Co. KG.Life support systems are equipment intended to support or sustain life, and whose failure to perform, when properly used in accordance with instructions provided, can be reasonably expected to result in personal injury or death.© TRINAMIC Motion Control GmbH & Co. KG 2010Information given in this data sheet is believed to be accurate and reliable. However neither responsibility is assumed for the consequences of its use nor for any infringement of patents or other rights of third parties, which may result from its use.Specifications are subject to change without notice.2FeaturesThese two phase hybrid stepper motors are optimized for microstepping and give a good fit to the TRINAMIC family of motor controllers and drivers.Main characteristics:∙NEMA 11 mounting configuration∙flange max. 28.0mm * 28.0mm∙5mm axis diameter, 20mm axis length∙step angle: 1.8˚∙optimized for microstep operation∙optimum fit for TMC222 / TMC236 / TMC246 / TMC262 based driver circuits∙ 4 wire connection∙CE approvedTable 2.1: Motor technical data3Order codesTable 3.1: Order codes4 Mechanical dimensions4.1 Lead wire configurationblackr e db l uFigure 4.1: Lead wire configuration4.2 DimensionsFigure 4.2: Dimensions (all values in mm)Table 4.1: Lead wire configuration5Torque figuresThe torque figures detail motor torque characteristics for half and full step. For half and full step operation there are always a number of resonance points (with less torque) which are not depicted. These will be minimized by microstep operation in most applications.5.1Motor QSH2818-32-07-006Testing conditions: VM: 24V 0.67A /Phase Driver, SMD 103Figure 5.1: QSH2818-32-07-006 speed vs. torque characteristics5.2Motor QSH2818-51-07-012Testing conditions: VM: 24V 0.67A /Phase Driver, SMD 103Figure 5.2: QSH2818-51-07-012 speed vs. torque characteristics6Considerations for operationThe following chapters try to help you to correctly set the key operation parameters in order to get a stable system.6.1Choosing the best fitting motor for an applicationFor an optimum solution it is important to fit the motor to the application and to choose the best mode of operation. The key parameters are desired motor torque and velocity. While the motor holding torque describes the torque at stand-still, and gives a good indication for comparing different motors, it is not the key parameter for the best fitting motor. The required torque is a result of static load on the motor, dynamic loads which occur during acceleration/deceleration and loads due to friction. In most applications the load at maximum desired motor velocity is most critical, because of the reduction of motor torque at higher velocity. While the required velocity generally is well known, the required torque often is only roughly known. Generally, longer motors and motors with a larger diameter deliver a higher torque. But, using the same driver voltage for the motor, the larger motor earlier looses torque when increasing motor velocity. This means, that for a high torque at a high motor velocity, the smaller motor might be the better fitting solution.Please refer to the torque vs. velocity diagram to determine the best fitting motor, which delivers enough torque at your desired velocities.6.1.1Determining the maximum torque requiredTry a motor which should roughly fit. Take into consideration worst case conditions, i.e. minimum driver supply voltage and minimum driver current, maximum or minimum environment temperature (whichever is worse) and maximum friction of mechanics. Now, consider that you want to be on the safe side, and add some 10 percent safety margin taking into account unknown degradation of mechanics and motor.6.2Motor current settingBasically, the motor torque is proportional to the motor current, as long as the current stays at a reasonable level. At the same time, the power consumption of the motor (and driver) is proportional to the square of the motor current. Optimally, the motor should be chosen to bring the required performance at the rated motor current. For a short time, the motor current may be raised above this level in order to get increased torque, but care has to be taken in order not to exceed the maximum coil temperature of 130°C respectively a continuous motor operation temperature of 90°C.Table 6.1: Motor current settings6.2.1Choosing the optimum current settingGenerally, you choose the motor in order to give the desired performance at nominal current. For short time operation, you might want to increase the motor current to get a higher torque than specified for the motor. In a hot environment, you might want to work with a reduced motor current in order to reduce motor self heating.The TRINAMIC drivers allow setting the motor current for up to three conditions:-Stand still (choose a low current)-Nominal operation (nominal current)-High acceleration (if increased torque is required: You may choose a current above the nominal setting, but be aware, that the mean power dissipation shall not exceed the motors nominal rating)If you reach the velocity limit, it might be a good idea to reduce the motor current, in order to avoid resonances occurring. Please refer to the information about choosing the driver voltage.6.2.2Choosing the standby currentMost applications do not need much torque during motor stand-still. You should always reduce motor current during stand still. This reduces power dissipation and heat generation. Depending on your application, you typically at least can half power dissipation. There are several aspects why this is possible: In standstill, motor torque is higher than at any other velocity. Thus, you do not need the full current even with a static load! Your application might need no torque at all, but you might need to keep the exact microstep position. Try how low you can go in your application. If the microstep position exactness does not matter for the time of standstill, you might even reduce the motor current to zero, provided that there is no static load on the motor and enough friction in order to avoid complete position loss.6.3Motor driver supply voltageThe driver supply voltage in many applications cannot be chosen freely, because other components have a fixed supply voltage of e.g. 24V DC. If you have possibility to choose the driver supply voltage, please refer to the driver data sheet, and consider that a higher voltage means a higher torque at higher velocity. The motor torque diagrams are measured for a given supply voltage. You typically can scale the velocity axis (steps/sec) proportionally to the supply voltage to adapt the curve, e.g. if the curve is measured for 48V and you consider operation at 24V, half all values on the x-Axis to get an idea of the motor performance.For a chopper driver, consider the following corner values for the driver supply voltage (motor voltage). The table is based on the nominal motor voltage, which normally just has a theoretical background in order to determine the resistive loss in the motor.Comment on the nominal motor voltage: Array(Please refer to motor technical data table.)Table 6.2: Driver supply voltage considerations6.3.1Determining if the given driver voltage is sufficientTry to brake the motor and listen to it at different velocities. Does the sound of the motor get raucous or harsh when exceeding some velocity? Then the motor gets into a resonance area. The reason is that the motor back-EMF voltage reaches the supply voltage. Thus, the driver cannot bring the full current into the motor any more. This is typically a sign, that the motor velocity should not be further increased, because resonances and reduced current affect motor torque.Measure the motor coil current at maximum desired velocityFor microstepping: If the waveform is still basically sinusoidal, the motor driver supply voltage is sufficient.For Fullstepping: If the motor current still reaches a constant plateau, the driver voltage is sufficient.If you determine, that the voltage is not sufficient, you could either increase the voltage or reduce the current (and thus torque).6.4Back EMF (BEMF)Within SI units, the numeric value of the BEMF constant has the same numeric value as the numeric value of the torque constant. For example, a motor with a torque constant of 1 Nm/A would have a BEMF constant of 1V/rad/s. Turning such a motor with 1 rps (1 rps = 1 revolution per second = 6.28 rad/s) generates a BEMF voltage of 6.28V.The Back EMF constant can be calculated as:is multiplied by 2 in this The voltage is valid as RMS voltage per coil, thus the nominal current INOMformula, since the nominal current assumes a full step position, with two coils switched on. The torque is in unit [Nm] where 1Nm = 100cNm = 1000mNm.One can easily measure the BEMF constant of a two phase stepper motor with a (digital) scope. One just has to measure the voltage of one coil (one phase) when turning the axis of the motor manually. With this, one gets a voltage (amplitude) and a frequency of a periodic voltage signal (sine wave). The full step frequency is 4 times the frequency the measured sine wave.6.5Choosing the commutation schemeWhile the motor performance curves are depicted for fullstepping and halfstepping, most modern drivers provide a microstepping scheme. Microstepping uses a discrete sine and a cosine wave to drive both coils of the motor, and gives a very smooth motor behavior as well as an increased position resolution. The amplitude of the waves is 1.41 times the nominal motor current, while the RMS values equal the nominal motor current. The stepper motor does not make loud steps any more – it turns smoothly! Therefore, 16 microsteps or more are recommended for a smooth operation and the avoidance of resonances. To operate the motor at fullstepping, some considerations should betaken into account.Table 6.3: Comparing microstepping and fullsteppingMicrostepping gives the best performance for most applications and can be considered as state-of-the art. However, fullstepping allows some ten percent higher motor velocities, when compared to microstepping. A combination of microstepping at low and medium velocities and fullstepping at high velocities gives best performance at all velocities and is most universal. Most Trinamic driver modules support all three modes.6.5.1FullsteppingWhen operating the motor in fullstep, resonances may occur. The resonance frequencies depend on the motor load. When the motor gets into a resonance area, it even might not turn anymore! Thus you should avoid resonance frequencies.6.5.1.1Avoiding motor resonance in fullstep operationDo not operate the motor at resonance velocities for extended periods of time. Use a reasonably high acceleration in order to accelerate to a resonance-free velocity. This avoids the build-up of resonances. When resonances occur at very high velocities, try reducing the current setting.A resonance dampener might be required, if the resonance frequencies cannot be skipped6.6Optimum motor settingsThe following table shows the settings for the highest reachable fullstep velocities.Table 6.4: Optimum motor settings6.6.1Settings for the TRINAMIC TMCL™ modulesFollowing TMCL™ settings apply best for highest motor velocities and smooth motor behavior at low velocities. They are intended for the use with TRINIMICs controller modules.Mixed decay should be switched on constantly. Microstep resolution is 4 (TMCL™), this is 16 times microstepping. The pulse devisor is set to 3. With a 64 microstep setting the same values are valid with the pulse divisor set to 1.Table 6.5: Optimum motor settings for TMCL™ modules (tested with TMCM-110)7Revision history 7.1Documentation revisionTable 7.1: Documentation revision8References[TMCL™] TMCL TM manual, 。
ENA1P-B28-L00128L中文资料(bourns)中文数据手册「EasyDatasheet - 矽搜」

SM2810数控切割系统使用说明书

第二章主控界面操作说明2.1 主控界面简介启动切割控制软件以后,呈现如以下图所示的控制操作界面。
以后所有的切割过程控制,全部在这个界面下进行。
2.2 操作按钮功能说明在主界面的最下面,从左到右均匀布有8个操作按钮,用户可以用鼠标点击操作,也可直接用键盘操作,其别离对应8个快捷键:F1 (8)操作提示:在用键盘或鼠标进行各种参数设置或点窜时,这8个操作按钮有时会隐藏,用户在点窜完后,只需键入键盘上的回车键〔Enter键〕即可显示出来。
调入文件〔快捷键 F1〕指定当前所要切割的 G 代码源文件,文件列表框中只能自动显示存放在 c:\SmartMove\G 目录下的所有后缀为.G的文件,以供用户选择。
假设用户想翻开存放在其他目录中的G代码文件,或是后缀为.PLT的PLT格式文件〔由CorelDraw 软件或AutoCAD软件生成〕,请单击文件列表框左边的“文件F〞即可呈现功能强大的 Windows 尺度翻开文件对话框〔键入“F〞也可以翻开文件对话框〕。
当翻开的文件是PLT文件时,系统将自动弹出一个对话框,同时在图形显示区右下方增加一个按钮:按照图形的大小输入适宜的切入切出线长度后,系统将自动添加切入切出线。
点击“PLT参数〞按钮,系统将弹出以上对话框,即可点窜切入切出线长度。
在图形显示区内显示出该文件所定义的切割图样和坐标轴。
无论该零件有多大多小,系统都能自动按比例缩小或放大显示,尽量使图样布满图形显示区。
图形中有一个小红方块,它代表该处是切割起点。
同时,在显示区下部显示有当前指定文件的总体尺寸切割范围,以作为用户切割前置板的参考。
操作提示:在图形显示区内双击鼠标左键,将从头显示一次图形。
2. 设定速度〔快捷键 F2〕指定切割速度,可以直接输入你所想要的运行速度值,也可从下拉框中选择。
单元是:毫米/分钟2. 切割模式〔快捷键 F3〕选择当前切割方式:等离子方式还是火焰方式。
由等离子方式切换到火焰方式时,系统将自动翻开低压预热氧总阀和高压切割氧总阀。
astme108标准中文版

astme108标准中文版
ASTM E108 标准是美国材料和试验协会(ASTM)制定的一项关于火灾试验的标准。
该标准的中文版通常称为ASTM E108标准中文版。
ASTM E108标准中文版主要用于评估建筑材料在火灾条件下的性能,以确定其抗火性能和安全性。
ASTM E108标准中文版主要包括以下内容:
1. 试验方法,该标准规定了一系列试验方法,用于评估建筑材料在火灾条件下的性能。
例如,标准中包含了对材料的燃烧性能、火焰传播性能、热辐射性能和烟雾产生性能等进行评定的方法。
2. 试验设备,标准中详细描述了进行火灾试验所需的设备和仪器。
这些设备包括燃烧室、热辐射计、烟雾密度计等,确保试验的准确性和可重复性。
3. 试验过程,标准中给出了进行火灾试验的详细步骤和操作要求。
这些步骤包括样品准备、试验条件设定、数据采集和分析等,以确保试验结果的可靠性和可比性。
4. 结果评定,标准中给出了对试验结果的评定方法和标准。
根据试验结果,可以对建筑材料进行等级评定,以指导其在实际应用中的选择和使用。
ASTM E108标准中文版在建筑行业中具有重要的应用价值。
它可以帮助设计师、建筑师和消防工程师评估建筑材料的抗火性能,从而提高建筑物的火灾安全性。
此外,该标准还可以用于建筑材料的质量控制和监督,确保其符合相关的安全标准和法规要求。
总之,ASTM E108标准中文版是一项用于评估建筑材料火灾性能的标准,通过一系列试验方法和评定标准,帮助确保建筑材料的抗火性能和安全性。
它在建筑行业中具有重要的应用价值,为建筑物的火灾安全提供了科学依据。
AD7610中文

表1. 48引脚14/16/18位PulSAR的选择
MIMD10A中文资料

Test Condition IC = 50mA IC = 1mA IE = 50mA VCB = 50V VEB = 4V
IC/IB = 10mA / 1.0mA IC = 1mA, VCE = 5V
VCE = 10V, IE = -5mA, f = 100MHz
Ordering Information (Note 3)
Characteristic
Symbol VCC VIN IO
Value -50
-5 to +5 -500
Maximum Ratings NPN Section Tr2 @ TA = 25°C unless otherwise specified
Characteristic Collector-Base Voltage Collector-Emitter Voltage Emitter-Base Voltage Collector Current
Device MIMD10A-7
Packaging SOT-363
Shipping 3000/Tape & Reel
Notes: 3. For Packaging Details, go to our website at /datasheets/ap02007.pdf. 4. For Lead Free/RoHS Compliant version part number, please add "-F" suffix to the part number above. Example: MIMD10-A-7-F.
fT
Min Typ Max Unit
Test Condition
-0.3
¾
SM101中文说明书

智能型调光硅箱操作手册目录1. 一般说明 (2)2. 保修与服务 (2)3. 概述 (3)4. 产品简介 (3)5. 性能与特点 (3)6. 功能键的定义 (5)7. 操作菜单 (5)8. 正常运行状态 (5)9.1 DMX Address(设置DMX开始地址) (6)9.2 Sel Curve(选择通道曲线) (6)9.3 Def Curve(定义自定义曲线) (7)9.4 Set Value(设置手动调光值) (8)9.5 LCD Contrast(调整LCD对比度) (9)9.6 SW Version(查看软件版本号) (9)9.7 RST Config(复位用户设置) (10)1. 一般说明:⇩请仔细阅读本手册的用法说明,它提供了有关安全的安装、应用和维护的重要信息。
⇩请妥善保存本手册,以备日后查询。
如果该设备被转卖或更换操作员,请确保设备与手册不分离,使操作者阅悉它的操作及相关指令。
⇩禁止易燃液体、水或金属粉末物质进入该设备。
⇩禁止拆除或修改该设备。
⇩如果不慎有液体进入机箱内,请立刻切断设备电源。
⇩如果有严重的操作问题,请立刻关闭机器,并即刻与TINHAO经销商或代理商联系。
⇩禁止打开该设备,机箱内没有用户使用的部分。
⇩禁止用户自己修理该设备。
不合格的修理人员可能损害设备或引起不正当的操作。
⇩如果设备有问题,请即刻与你最近的授权服务中心或制造商联系。
★务必坚持原配件进行安装维护!2. 保修与服务⇩自购买之日起一年内,若发生任何制造工艺或元器件问题造成的损坏,本公司提供免费的维修服务。
⇩由于粗心或不正当操作导致的故障,不属于保修服务之列。
⇩未经授权就擅自改装或修改本设备的,本保修服务将自动无效。
⇩运输费用和相关风险由设备所有者承担。
⇩本承诺服务不包括附件、辅助装置以及维修人员上门服务费。
⇩如果设备已被未经许可的人损坏或修理,本保证将不再有效。
3. 概述:AT1000+智能型调光硅箱是根据国内市场的需求,在中英合作下共同研制开发的调光硅箱,其重量轻和在防震技术上的完善及在维修方面的便利,解决了目前国内在流动硅箱方面存在的一大难题。
模型3110B双弯枝电磁兼容性测试系统用户手册说明书

1981Archived 3/18/10Model 3110BBiconical AntennaMANUAL© EMC TEST SYSTEMS, L.P. – MARCH 2002 REV F – PN 399108MODEL 3110B BICONICAL ANTENNA© EMC TEST SYSTEMS, L.P. – MARCH 2002REV F – PN 399108EMC Test Systems, L.P. reserves the right to make changes to any product described herein in order to improve function, design or for any other reason. Nothing contained herein shall constitute EMC Test Systems, L.P. assuming any liability whatsoever arising out of the application or use of any product or circuit described herein. EMC Test Systems, L.P. does not convey any license under its patent rights or the rights of others.© Copyright 2002 by EMC Test Systems, L.P. All Rights Reserved.No part of this document may be copied by any means without written permission from EMC Test Systems, L.P.E-MAIL & INTERNET ************************USA1301 Arrow Point Dr., Cedar Park, TX 78613 P.O. Box 80589, Austin, TX 78708-0589 Tel 512.531.6400 Fax 512.531.6500FINLANDEuroshield OY Mekannikontie 1 27510, Eura, Finland Tel 358.2.838.3300 Fax 358.2.865.1233SINGAPORELindgren RF Enclosures Asia-Pacific 87 Beach Road#06-02 Chye Sing Building Singapore 189695Tel 65.536.7078 Fax 65.536.7093Archived 3/18/10MODEL 3110B BICONICAL ANTENNA© EMC TEST SYSTEMS, L.P. – MARCH 2002 REV F – PN 399108Table of ContentsINTRODUCTION ........................................................................................................................................ 1 ASSEMBLY INSTRUCTIONS ................................................................................................................... 1 MOUNTING INSTRUCTIONS .................................................................................................................. 2 APPLICATION ............................................................................................................................................ 3 TYPICAL DATA .......................................................................................................................................... 4 SPECIFICATIONS ...................................................................................................................................... 6 MAINTENANCE ......................................................................................................................................... 7 WARRANTY STATEMENT . (8)Archived 3/18/10© EMC TEST SYSTEMS, L.P. – MARCH 2002REV F – PN 399108INTRODUCTIONThe ETS-Lindgren EMCO brand Model 3110B BiconicalAntenna is specifically designed for radiated emissionstesting. This high performance, receive only, antennaoperates with in a frequency range of 30 to 300 MHz.The biconical elements are made from aluminum rods andare welded into a fixed assembly. The elements mount ontoa balun network which is fabricated of aluminum and thenecessary impedance-matching components. Its lightweightconstruction provides for ease in portability and storage. ASSEMBLY INSTRUCTIONSThe Model 3110B consists of the following (shippedunassembled):1 ea. Balun2 ea. Biconical Elements2 ea. Belleville Washers (In a small plastic bag)1 ea. Mounting ClampStep 1.After carefully unpacking all of the components, take oneof the belleville washers and slide it onto the threadedscrew end of one of the biconical elements.Step 2.Line up the screw threads with the receptacle hole on thebalun and turn the biconical element until it is firmlysecured in the balun. Be careful not to cross-thread thisconnection or permanent damage to the joint could occur.© EMC TEST SYSTEMS, L.P. – MARCH 2002 1 REV F – PN 399108Mounting InstructionsMODEL 3110B BICONICAL ANTENNA2 © EMC TEST SYSTEMS, L.P. – MARCH 2002REV F – PN 399108Step 3. Repeat Steps 1 and 2 with the other washer and biconicalelement .Now you are ready to mount the antenna on a tripod for testing.MOUNTING INSTRUCTIONSThe mounting clamp of the Model 3110B uses standard 7/8x14 threads and comes with a 1/4x20 thread adapter for versatility when connecting to an ETS tripod or most other tripods for support.After the mounting clamp is attached to a tripod, unscrew the latch and open the clamp. Insert the balun of the 3110B into the clamp and close the top over the balun. Move the screw latch to the closed position and tighten, so the balun is held securely. The cable can now be attached to the output connector.Archived 3/18/10MODEL 3110B BICONICAL ANTENNA Application© EMC TEST SYSTEMS, L.P. – MARCH 20023REV F – PN 399108APPLICATIONThe Model 3110B is ideally suited for swept site attenuation measurements per ANSI and FCC specifications. Also, the Model 3110B can be used for horizontal as well as vertical site attenuation measurements. A 20 dB pre-amp is recommended in line with the receive antenna to minimize the required transmitted power and to reduce the possibility of saturation of the transmitting antenna. The maximum continuous input power to the Model 3110B is 250 mW.When the 3110B is used vertically, the same element orientation need not be maintained from measurement to measurement. The Model 3110B exhibits excellent symmetrical performance and test repeatability is assured by the balun design.Each antenna is calibrated during manufacturing. The results of the calibration are tabulated and included with this manual as gain and antenna factor vs frequency for use in Specification Compliance Testing. Typical data for the Model 3110B can be found in the next section.Archived 3/18/10Typical DataMODEL 3110B BICONICAL ANTENNA4 © EMC TEST SYSTEMS, L.P. – MARCH 2002REV F – PN 399108TYPICAL DATA306090120150180210240270300510152025d B 1/mFrequency (Mhz)Model 3110B Antenna Factor306090120150180210240270300-20-15-10-55101 m3 m10 md BFrequency (Mhz)Model 3110B GainArchived 3/18/10MODEL 3110B BICONICAL ANTENNA Typical Data© EMC TEST SYSTEMS, L.P. – MARCH 20025REV F – PN 39910830609012015018021024027030035791315Frequency (Mhz)Model 3110B VSWR306090120150180210240270300406080100120140160180200d e g r e e s Frequency (Mhz)Model 3110B Half Power BeamwidthArchived 3/18/10SpecificationsMODEL 3110B BICONICAL ANTENNA6 © EMC TEST SYSTEMS, L.P. – MARCH 2002REV F – PN 399108SPECIFICATIONSElectricalFrequency Range 30 to 300 MHzVSWR Ratio (AVG) 2.0:1Maximum Continuous Power 250 mW Peak Power NA Impedance 50 ςConnectorType N femalePhysicalWidth 132.1 cm52.0 inDepth 55.9 cm22.0 inDiameter 52.0 cm20.5 inWeight 2.7 kg6.0 lbNOTE: ETS-Lindgren recommends using a 6DB pad attached to the end of the antenna, otherwise high VSWR may occur.Archived 3/18/10MODEL 3110B BICONICAL ANTENNA Maintenance© EMC TEST SYSTEMS, L.P. – MARCH 20027REV F – PN 399108 MAINTENANCETo ensure reliable and repeatable long-term performance,annual recalibration of your antenna by ETS-Lindgren’sexperienced technicians is recommended. Our staff canrecalibrate almost any type or brand of antenna. Please callto receive a Service Order Number prior to sending anantenna to us for calibration.For more information about our calibration services or toplace an order for antenna calibration visit our calibrationwebsite at /.Archived 3/18/10Warranty Statement MODEL 3110B BICONICAL ANTENNA8 © EMC TEST SYSTEMS, L.P. – MARCH 2002 REV F – PN 399108 WARRANTY STATEMENTEMC Test Systems, L.P., hereinafter referred to as the Seller, warrants that standard EMCO products are free from defect in materials and workmanship for a period of two (2) years from date of shipment. Standard EMCO Products include the following:Antennas, Loops, HornsGTEM cells, TEM cells, Helmholtz CoilsLISNs, PLISNs, Rejection cavities & NetworksTowers, Turntables, Tripods, & ControllersField Probes, Current Probes, Injection ProbesIf the Buyer notifies the Seller of a defect within the warranty period, the Seller will, at the Seller’s option, either repair and/or replace those products that prove to be defective.There will be no charge for warranty services performed at the location the Seller designates. The Buyer must, however, prepay inbound shipping costs and any duties or taxes. The Seller will pay outbound shipping cost for a carrier of the Seller’s choice, exclusive of any duties or taxes. If the Seller determines that warranty service can only be performed at the Buyer’s location, the Buyer will not be charged for the Seller’s travel related costs.This warranty does not apply to:Normal wear and tear of materialsConsumable items such as fuses, batteries, etc.Products that have been improperly installed, maintained or usedProducts which have been operated outside the specificationsProducts which have been modified without authorization Calibration of products, unless necessitated by defectsTHIS WARRANTY IS EXCLUSIVE. NO OTHER WARRANTY, WRITTEN OR ORAL, IS EXPRESSED OR IMPLIED, INCLUDING BUT NOT LMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. THE REMEDIES PROVIDED BY THIS WARRANTY ARE THE BUYER’S SOLE AND EXCLUSIVE REMEDIES. IN NO EVENT IS THE SELLER LIABLE FOR ANY DAMAGES WHATSOEVER, INCLUDING BUT NOT LIMITED TO, DIRECT, INDIRECT, SPECIAL, INCIDENTAL, OR CONSEQUENTIAL DAMAGES, WHETHER BASED ON CONTRACT, TORT, OR ANY OTHER LEGAL THEORY. Note: Please contact the Seller’s sales department for a Return Materials Authorization (RMA) number before shipping equipment to us.Archived 3/18/10。
MAX1081资料
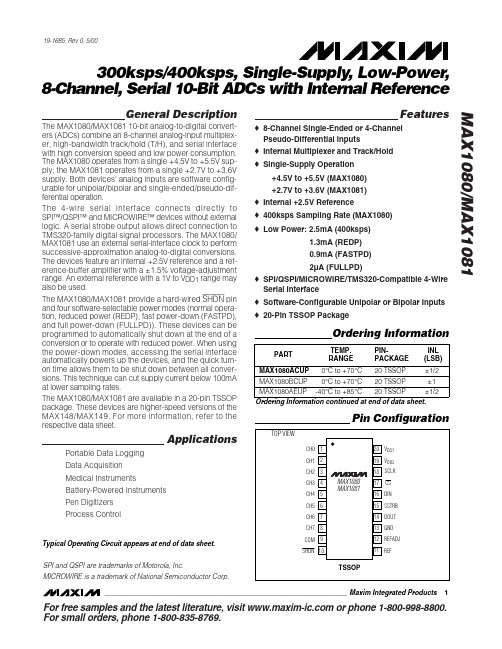
Features
o 8-Channel Single-Ended or 4-Channel Pseudo-Differential Inputs o Internal Multiplexer and Track/Hold o Single-Supply Operation +4.5V to +5.5V (MAX1080) +2.7V to +3.6V (MAX1081) o Internal +2.5V Reference o 400ksps Sampling Rate (MAX1080) o Low Power: 2.5mA (400ksps) 1.3mA (REDP) 0.9mA (FASTPD) 2µA (FULLPD) o SPI/QSPI/MICROWIRE/TMS320-Compatible 4-Wire Serial Interface o Software-Configurable Unipolar or Bipolar Inputs o 20-Pin TSSOP Package
Portable Data Logging Data Acquisition Medical Instruments Battery-Powered Instruments Pen Digitizers Process Control
MAX1080 MAX1081
17
CS
16 DIN 15 SSTRB 14 DOUT 13 GND 12 REFADJ 11 REF
Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is noቤተ መጻሕፍቲ ባይዱ implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.
IPC-810B(中文说明书)-A0

本手册包含的内容并不代表本公司的承诺,本公司保留对此手册 更改的权利,且不另行通知。对于任何因安装、使用不当而导致的直 接、间接、有意或无意的损坏及隐患概不负责。
EVOC 是研祥智能科技股份有限公司的注册商标。本手册所涉及 到的其他商标,其所有权为相应的产品厂家所拥有。
本手册内容受版权保护,版权所有。未经许可, 不得以机械的、 电子的或其它任何方式进行复制。
l 底板: 14 槽标准工业级底板,ATX 主板(可选); l 面板: 高强度面板,带状态观察窗门板,有锁保护; l 电源: 带 PFC 工业 AT/ATX 电源(可选)。
电源特性
l 电参数与安全保护特性符合 ATX 电源技术标准 l 安规和 EMC 性能符合 3C 要求
电磁兼容性
l 无线电骚扰限值符合 GB9254-1998 标准 A 级 l 抗扰度符合 GB/T 17618-1998 标准的限值
19〃4U 14 槽机箱无电源无底板
IPC-810B
-1-
第一章 产品介绍
性能指标
l 外形尺寸:482mm(宽)×177mm(高)×452mm(深) l 工作温度:0℃~+50℃; l 相对湿度: 5%~90%,40℃无结露 l 储存温度:-40℃~+60℃
产品配置
l 机箱: 优质钢板成型,喷涂高温烘漆保护的 19〃标准上架型, 4U 高度机箱;
常见故障处理
产品的常见故障处理请参见《工业计算机常见故障分析和处理》。 在此不多述说
IPC-810B
-3-
第二章 安装说明
产品尺寸图
第Hale Waihona Puke 章 安装说明单位:mm-4-
IPC-810B
产品外观图
第二章 安装说明
十倍电压放大器电路图大全(前置放大电压跟随器LM386音响功放电路)精选全文完整版

可编辑修改精选全文完整版十倍电压放大器电路图大全(前置放大电压跟随器LM386音响功放电路)电压放大器(VoltageAmplifier)是提高信号电压的装置。
对弱信号,常用多级放大,级联方式分直接耦合、阻容耦合和变压器耦合,要求放大倍数高、频率响应平坦、失真小。
当负载为谐振电路或耦合回路时,要求在指定频率范围内有较好幅频和相频特性以及较高的选择性。
电压放大器工作原理运算放大器的核心是一个具有恒流源的差分放大器,由于恒流源的作用尽量的保证晶体管的工作点,能在晶体管特性曲线比较线性的一段工作,并且采用了深度的负反馈使整个运算放大电路对信号具有较好的线性放大。
一个运算放大器为了保证有一定的增益,都是采用多级直流放大器的组合,在制造时就在一个芯片上完成,以集成电路运算放大器的形式出现;保证了良好的耦合特性及稳定性。
所以运算放大器就是高质量的模拟放大器的代名词。
由于运算放大器的核心是一个差分放大器,所以就有两个输入端,和一个输出端,其在电路图上的表示符号,引脚的位置和电压比较器一样;两个输入端和输出的关系也有同相输入端和反相输入端的称呼。
这两个输入端都可以输入信号(对称的差分信号);也可以,一个输入端设定为基准电压,一个输入端输入模拟信号。
运算放大器既然能把信号进行放大,显然我们用他来代替电压比较器作为电压比较用也是没有问题的,就有许多电路的电压比较电路就采用了运算放大器电路完成的。
不过运算放大器作为电压比较器使用;其灵敏度、反映速度都要差的多,还是不要这样替代用的为好,但是电压比较器是绝对不能作为运算放大器用的。
在一般的电路原理图上运算放大器和电压比较器,光从符号上很难区分图纸上表示的是运算放大器还是电压比较器,只能通过对电路的分析,进行判断。
十倍电压放大器电路图(一)工频干扰是脑电信号的主要干扰,虽然前置放大电路对共模干扰具有较强的抑制作用,但部分工频干扰是以差模信号方式进入电路的,且频率处于脑电信号的频带之内,加上电极和输入回路不稳定等因素,前级电路输出的脑电信号仍存在较强的工频干扰,所以必须专门滤除。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0.7 ± 0.1
1
元器件交易网
MAZ8000 Series
I Electrical characteristics within part numbers Ta = 25°C
Zener voltage Part Number Min 2.28 2.50 2.50 2.65 2.80 2.80 2.95 3.10 3.10 3.25 3.40 3.40 3.55 3.70 3.70 3.87 4.00 4.03 4.17 4.31 4.40 4.45 4.59 4.74 4.80 4.87 5.00 5.14 5.30 5.30 5.48 5.66 5.80 5.85 6.05 6.24 6.40 6.44 6.64 6.85 7.00 7.07 7.29 7.51 7.70 7.77 8.03 8.29 VZ (V) Nom 2.40 2.70 2.60 2.80 3.00 2.90 3.10 3.30 3.20 3.40 3.60 3.50 3.70 3.90 3.80 4.00 4.30 4.10 4.30 4.40 4.70 4.60 4.70 4.90 5.10 5.00 5.10 5.30 5.60 5.40 5.60 5.80 6.20 6.00 6.20 6.40 6.80 6.60 6.80 7.00 7.50 7.30 7.50 7.70 8.20 7.90 8.20 8.50 Reverse current Operating resistance
5
60
0.5
4.0
5
5.0
20
5
60
0.5
4.6
5
2.4 2_7or2^7 2_7 2^7 3_0or3^0 3_0 3^0 3_3or3^3 3_3 3^3 3_6or3^6 3_6 3^6 3_9or3^9 3_9 3^9 4_3or4-3or4^3 4_3 4-3 4^3 4_7or4-7or4^7 4_7 4-7 4^7 5_1or5-1or5^1 5_1 5-1 5^1 5_6or5-6or5^6 5_6 5-6 5^6 6_2or6-2or6^2 6_2 6-2 6^2 6_8or6-8or6^8 6_8 6-8 6^8 7_5or7-5or7^5 7_5 7-5 7^5 8_2or8-2or8^2 8_2 8-2 8^2
MAZ3024 MAZ3027 MAZ3027-L MAZ3027-H MAZ3030 MAZ3030-L MAZ3030-H MAZ3033 MAZ3033-L MAZ3033-H MAZ3036 MAZ3036-L MAZ3036-H MAZ3039 MAZ3039-L MAZ3039-H MAZ3043 MAZ3043-L MAZ3043-M MAZ3043-H MAZ3047 MAZ3047-L MAZ3047-M MAZ3047-H MAZ3051 MAZ3051-L MAZ3051-M MAZ3051-H MAZ3056 MAZ3056-L MAZ3056-M MAZ3056-H MAZ3062 MAZ3062-L MAZ3062-M MAZ3062-H MAZ3068 MAZ3068-L MAZ3068-M MAZ3068-H MAZ3075 MAZ3075-L MAZ3075-M MAZ3075-H MAZ3082 MAZ3082-L MAZ3082-M MAZ3082-H
0.5 ± 0.1
2
0.16 − 0.06
+ 0.1
1
1.25 ± 0.1
0.3
0.4 ± 0.1
1.7 ± 0.1 2.5 ± 0.2
0.4 ± 0.1
I Absolute Maximum Ratings Ta = 25°C
Parameter Repetitive peak forward current Total power dissipation* Junction temperature Storage temperature Symbol IFRM Ptot Tj Tstg Rating 200 150 150 −55 to +150 Unit mA mW °C °C
Note) 1 Rated input/output frequency: 5 MHz 2 *1 : The VZ value is for the temperature of 25°C. In other cases, carry out the temperature compensation. *2 : Guaranteed at 20 ms after power application. *3 : Tj = 25°C to 150°C
Parameter Forward voltage Zener voltage*2 Operating resistance Symbol VF VZ RZK RZ Reverse current Temperature coefficient of zener voltage*3 IR SZ IF = 10 mA IZ ·················· Specified value IZ ·················· Specified value IZ ·················· Specified value VR ··············· Specified value IZ ·················· Specified value Refer to the list of the electrical characteristics within part numbers Conditions Min Typ 0.9 Max 1.0 Unit V V Ω Ω µA mV/°C
元器件交易网
Zener Diodes
MAZ8000 Series
Silicon planar type
Unit : mm
For stabilization of power supply
K A
0.625
I Features
• Extremely low noise voltage caused from the diode (2.4V to 39V, 1/3 to 1/10 of our conventional MAZ3000 series) • Extremely good rising performance (in the low-current range) • Easy-to-select the optimum diode because of their finely divided zener-voltage ranks • Guaranteed reliability, equivalent to that of conventional products (Mini type package) • Allowing to reduce the mounting area, thickness and weight substantially, compared with those of the conventional products • Allowing both reflow and flow mode of automatic soldering • Allowing automatic mounting by an existing chip mounter
2
元器件交易网
Zener Diodes
I Electrical characteristics within part numbers (continued) Ta = 25°C
Zener voltage Part Number Min 8.50 8.58 8.87 9.14 9.40 9.44 9.75 10.07 10.40 10.40 10.73 11.05 11.40 11.40 11.73 12.06 12.40 12.40 12.73 13.25 13.65 13.90 13.90 14.60 14.95 15.30 15.30 15.70 16.26 16.90 16.90 17.55 18.20 18.80 18.85 19.50 20.15 20.80 20.80 21.45 22.10 22.80 22.80 23.50 24.35 25.10 25.30 26.30 27.30 VZ (V) Nom 9.10 8.80 9.10 9.40 10.00 9.70 10.00 10.30 11.00 10.70 11.00 11.30 12.00 11.70 12.00 12.30 13.00 12.70 13.00 13.70 14.00 15.00 14.30 15.00 15.30 16.00 15.70 16.00 16.70 18.00 17.30 18.00 18.70 20.00 19.30 20.00 20.70 22.00 21.30 22.00 22.70 24.00 23.30 24.00 25.00 27.00 26.00 27.00 28.00 Reverse current Operating resistance
VR (V) 1.0 1.0
RZ RZK SZ (mV/°C) (Ω) IZ (Ω) IZ IZ Max (mA) Max (mA) Typ (mA) 100 5 −1.6 5 110 5 −2.0 5
Marking Symbol
Conventional products
1.0
120
Note) L/M/H marked products will be supplied unless other wise specified
Note) * : With a printed-circuit board
I Common Electrical Characteristics Ta = 25°C*1