基于遗传算法的足球机器人路径规划
基于遗传算法的机器人路径规划研究

基于遗传算法的机器人路径规划研究机器人技术的发展越来越成熟,机器人已经广泛应用于生产、医疗、军事等领域,成为现代社会的一大利器。
在机器人的应用领域中,机器人的路径规划是一个非常关键的环节。
基于遗传算法的机器人路径规划,是近几年来机器人路径规划领域的研究热点之一。
本文将从以下几个方面来探讨基于遗传算法的机器人路径规划的研究现状。
一、机器人路径规划的背景机器人路径规划在机器人技术中占据着非常重要的地位。
机器人路径规划的主要任务是规划机器人从起点到达终点的路线,并且在此过程中尽量减小机器人的代价。
机器人路径规划的过程涉及到许多技术领域,如图像处理、人工智能、计算机视觉等。
早在20世纪50年代,机器人就已经出现在人们的视野中。
但当时的机器人主要是应用于工业制造领域。
另外,这些机器人多数是只能进行简单的重复性工作。
随着计算机技术的不断发展,机器人技术也得到了大力的推广,为机器人技术的发展提供了强有力的支持。
在未来的发展过程中,机器人技术将会在更广泛的领域得到应用。
二、遗传算法简介遗传算法是一种模拟自然界生物进化过程的优化算法。
它是建立在基因遗传和自然选择等生物进化规律上的一种算法。
遗传算法通过种群的遗传操作来寻找最优解,具有简单、易于理解、鲁棒性强等特点。
遗传算法(Genetic Algorithm,GA)是一种通过模拟自然选择和遗传机制进行优化的搜索算法。
它最早由 J. Holland 于 1975 年提出。
遗传算法是模拟自然选择的一种适应性优化搜索技术,借鉴了生物界的遗传、进化和自然选择等思想,能够在搜索过程中不断寻找最优解。
遗传算法的基本操作包括选择、交叉、变异。
个体适应度越高,其在选择过程中被选中的概率就越大,从而被保留到下一代。
三、遗传算法在机器人路径规划中的应用机器人的路径规划过程一般是一个优化问题,需要根据机器人的特殊任务和环境,采用合适的方法来进行规划。
当前,有一些常用的路径规划方法,如A*算法、Dijkstra算法、拉普拉斯最小曲率算法等。
基于余弦算法的足球机器人路径规划
第 2 卷第 1 6 期
v0_ 6. l2 No. 1
西 华 大 学 学 报 ・ 自 然 科 学 版
J un l f h aUnv riy。Nau a ce c o r a u iest o Xi t rl i e S n
20 0 7年 1 月
基金项 目: 四川省应用基础研究资助项 目(3 2 2 ) 四川省重点学科研究资助项 目( Z 2 2 1 0 2 19 ; SD453 ) 作者简介 : 柳在鑫(9 8 )男 , 17 一 , 湖北省黄梅人 , 讲师 , 硕士 , 主要从 事智能机器人技术的研究工作 。
维普资讯
摘
要: 在分析基本算法不足的基础上 , 出了机器人 的路径规划方法 , 提 利用余 弦 曲线具 有光滑 、 可微 的特性 , r
实时 、 有效地解决机器人避开障碍物从给定点到 目标点 找到一条最 优路径规 划 问题 。仿 真试验表 明 : 提出的方法 具有较强的路径规划能力 , 计算量非常小 , 具有较高 的实用价值 。 关键词 : 足球机器人 ; 弦算法 ; 余 障碍 回避 ; 最优路径规划
中图分类号 : P 4 T 2 文献标识码 : A
在足球机器人 中, 径规划 的 目的主要是 为 了在 路 充满对抗 的赛场 上规 划 出一条 满足 某项 评 价指 标 的 无 碰路径 。路径规划主要应 用于机器人 底层策 略 中 , 作 为足球 机器人基本动作 实现的基础 , 的优 劣将直 它 接 影响动作 的实 时性 和准 确性 , 因此 , 个足 球 机器 每 人研究人 员都 把它 作为 一个 研究 重点 。哈 尔滨 工业 大学[采用 了一种离散 的栅格势场来规 划路径 , 1 ] 并取 得 了较好 的效果 , 但是 为了提 高规划 的准确性 必须对 赛 场进行更细 的栅格划分 , 势必 降低 实 时性 。韩 这样
基于遗传算法的机器人路径规划研究
基于遗传算法的机器人路径规划研究第一章:研究背景和意义机器人已经广泛应用于工业生产和人们的日常生活中,其自主导航能力是实现智能化生产和服务的核心技术。
机器人路径规划是自主导航的重要环节,它的效率和精度直接关系到机器人任务执行的成功率和安全性。
遗传算法是一种有效的全局寻优算法,它可以对高维、复杂、非线性问题进行求解,因此有望应用于机器人路径规划的研究中。
本文将介绍基于遗传算法的机器人路径规划研究,探讨其理论基础和应用前景,以期对机器人自主导航技术的发展做出一定的贡献。
第二章:机器人路径规划概述机器人路径规划是在给定环境下,通过算法计算出机器人的最短、最快、最安全或者其他特定的路径,以实现其任务执行的目标。
机器人路径规划的方法主要有以下几种:1. 离线路径规划:提前规划好机器人的路径,并存储在机器人的控制器或者计算机中,机器人按照预先生成的路径自主导航。
2. 在线路径规划:机器人在导航过程中实时计算路径,根据传感器获取的环境信息调整路径,实现实时自主导航。
3. 局部路径规划:机器人只计算前方一定距离内的路径,保持对周围环境的敏感度,以应对复杂多变环境。
4. 全局路径规划:机器人计算从起点到终点的完整路径,保证整个路径无碰撞。
第三章:遗传算法概述遗传算法是模拟自然进化过程的一种计算智能算法,它通过模拟生物进化过程中的选择、交叉、变异等操作搜索最优解。
遗传算法的基本流程包括:种群初始化、选择、交叉、变异、适应度评估和终止条件设定。
遗传算法相较于其他优化算法,具有以下几个优点:1. 全局寻优能力好。
遗传算法可以处理复杂、非线性、高维的问题,在全局范围内寻找最优解。
2. 适应度函数灵活。
可以根据实际问题调整适应度函数,使算法更加贴近实际应用。
3. 适用于并行计算。
遗传算法的设计思路易于并行化,可以利用多核CPU、GPU等技术加速计算。
4. 支持多样化优化。
遗传算法可以同时优化多个目标函数,也可以处理带有限制条件的优化问题。
基于遗传算法的移动机器人路径规划研究优秀毕业论文

II
学位论文独创性声明
本人郑重声明: 1、 坚 持 以 “ 求 实 、 创 新 ” 的 科 学 精 神 从 事 研 究 工 作 。 2、 本 论 文 是 我 个 人 在 导 师 指 导 下 进 行 的 研 究 工 作 和 取 得 的 研 究 成果。 3、本 论 文 中 除 引 文 外 ,所 有 实 验 、数 据 和 有 关 材 料 均 是 真 实 的 。 4、 本 论 文 中 除 引 文 和 致 谢 的 内 容 外 , 不 包 含 其 他 人 或 其 它 机 构 已经发表或撰写过的研究成果。 5、 其 他 同 志 对 本 研 究 所 做 的 贡 献 均 已 在 论 文 中 作 了 声 明 并 表 示 了谢意。
研究生签名:
日
期:
第 1 章 绪论
第 1 章 绪论
1.1 引言
当人类进入二十一世纪后,人类正在以非凡的智慧构思新世纪的蓝图。在各 种新技术中,机器人技术发展的尤其迅速,得到了各个国家的重视。机器人在许 多领域的广泛应用对许多国家的工业生产、外太空搜索、国防的建设以及整个国 民经济和人民生活产生了重大影响,而且这种影响还在不断扩大中[1]。因此,机 器人技术的发展体现了一个国家高科技水平和工业自动化程度,而且在某些场合 和环境中正在替代人发挥着日益重要的作用。移动机器人是机器人学的一个重要 分支,随着传感技术、计算机科学、人工智能及其他相关学科的迅速发展,移动 机器人向着智能化和多样化方向发展,其应用也越来越广泛,几乎渗透到所有领 域[2]。
研究生签名:
日
期:
学位论文使用授权声明
本人完全了解南京师范大学有关保留、使用学位论文的规定,学 校有权保留学位论文并向国家主管部门或其指定机构送交论文的电 子 版 和 纸 质 版 ;有 权 将 学 位 论 文 用 于 非 赢 利 目 的 的 少 量 复 制 并 允 许 论 文 进 入 学 校 图 书 馆 被 查 阅 ;有 权 将 学 位 论 文 的 内 容 编 入 有 关 数 据 库 进 行 检 索 ;有 权 将 学 位 论 文 的 标 题 和 摘 要 汇 编 出 版 。保 密 的 学 位 论 文 在 解密后适用本规定。
基于时间最优的足球机器人路径规划
基于时间最优的足球机器人路径规划郭路生吕维先杨林权中国地质大学信息工程学院人工智能研究所,湖北武汉430074摘要:首次提出了一种基于时间最优的足球机器人的路径规划的方法。
该方法用平滑的Bezier曲线代替传统的折线作为路径的描述,能满足移动机器人的非完整性约束方程,并能使机器人获得较大的运动速度,然后用遗传算法对代表路径的Bezier曲线控制点进行时间寻优。
遗传算法的适应值函数充分考虑了影响机器人运动时间的三个因素:路径的安全性、长度和平滑度。
仿真结果和实际比赛表明了该方法的有效性。
关键字:时间最优路径规划Bezier曲线遗传算法A path planning approach to soccer robot based on time optimization Abstract: This paper presents a path planning approach to soccer robot based on time optimization for the first time. In order to improve the speed of robot’s movement, the path is described with a smooth Bezier curve instead of traditional broken lines, then the control points of Bezier curve presenting the path is optimized by genetic algorithm. The fitness function of the genetic algorithm takes full consideration of three factors which affect the time of robot’s movement: security, length and smoothness of the path. Results of the experiments and real match show the efficiency of the method.Key word: time optimization; path planning; Bezier curve; genetic algorithm1 引言足球机器人系统是一个典型的且非常具有挑战性的多智能体系统[1],是一个实时、动态的复杂环境。
基于神经网络和遗传算法的足球机器人路径规划
神经 网络描述存在 障碍 物的动态环境 , 然后用遗传算法对代表路径 的控制 点进行 寻优 , 并把路径安全性和最短路径要求 融合为 一个
适应度 函数。通过仿真 实验表 明该方 法具 有较 高的实时性和有效性。 关键词 足球机器人 路 径规划 神经 网络 遗传算法
PATH PLANNI NG APPROACH TO ROBO T O CCER S BAS ED ON NEURAL NETW ORK AND GENETI ALGORI C THM
基 于神 经 网络 和 遗 传 算 法 的足 球 机 器 人 路 径 规 划
刘祚时 胡翠娜
( 江西理工大学机 电工程学院 江西 赣州 3 10 ) 4 0 0
摘 要
针对足球机器人在 动态环境 下 的安全 路径 规划 , 出一种将神 经 网络 和遗传 算法相 结合 的路 径规划 方法 。用 h p e 提 of l id
n u a ew r n e ei lo i m. T e n u a n t o k d s r l h y a c e vr n n i b tc e h n t e c n r lp i t u v e rln t o k a d g n t a g rt c h h e r e w r e c i e t e d n mi n io me t w t o sa l ,t e h o t on s c r e l b h o p e e t g t e p t so t z d b e ei l oi m , n ef n s fb t h a tr f e u i d s ot s dsa c r u e o a f n s r s ni h ah i p i e y g n t ag r h n mi c t a d t t e so o h t ef cos o c r ya h r t i n e a ef s d t t e s h i s tn e t i fn t n u ci .T e s lt n r s l s o s t a h t o a ih r a — me a i t n f ce t o h i a i e ut h w h tt e me h d h sh g e t b l y a d ef in . mu o l i i i Ke wo d y rs Ro o o c r P t ln i g Ne r ew r s Ge e i ag r h b ts c e ah p a n n ua n tok l n t lo i m c t
基于遗传算法的双足足球机器人路径规划
基于遗传算法的双足足球机器人路径规划樊朋涛;杨宜民【期刊名称】《现代计算机(专业版)》【年(卷),期】2012(000)024【摘要】In order to solve the path planning of biped soccer robot, uses the Simulate Anneal Arithmetic to improve the choice method of Genetic Algorithm, by which the Genetic Algorithm can be more diversity. Presents a new evaluate function which adds a smooth factor to ensure the smooth and stable of the biped soccer robot. Proves the valid by simulation experiment.%轮式机器人路径规划已有很多解决方案,但应用到双足机器人有很大局限性。
为解决双足足球机器人路径规划问题,运用遗传算法,采用新的评价函数,增加平滑因子,保证双足机器人运动的稳定性、高效性和平滑性。
采用模拟退火算法改进遗传算法的群体选择方法.保证遗传算法早期的物种多样性差异性和晚期竞争的激烈性。
通过仿真足球平台实验.证明其合理性。
【总页数】5页(P3-6,22)【作者】樊朋涛;杨宜民【作者单位】广东工业大学自动化学院,广州510006;广东工业大学自动化学院,广州510006【正文语种】中文【中图分类】TP24【相关文献】1.基于遗传算法的足球机器人路径规划 [J], 刘洲洲2.基于小生境遗传算法的足球机器人路径规划 [J], 于飞;吕冬梅;刘喜梅3.基于神经网络和遗传算法的足球机器人路径规划 [J], 刘祚时;胡翠娜4.基于势场改进蚁群算法的足球机器人路径规划研究 [J], 曲宝福;王利利;任超群5.基于多优化快速扩展随机树算法的足球机器人路径规划 [J], 茹锋; 喻阳俭; 王萍; 张妮因版权原因,仅展示原文概要,查看原文内容请购买。
基于改进遗传算法的机器人路径规划

基于改进遗传算法的机器人路径规划机器人是一种有着智能思维的人工智能系统,它能根据环境变化智能调整自己的动作,完成各种任务。
其中,除了基本的运动过程外,决策和规划是机器人实现智能化的重要环节。
机器人运动轨迹的规划对于实现机器人的灵活、高效和安全地运动至关重要。
怎样才能合理地规划机器人的运动路径呢?基于改进遗传算法的机器人路径规划成为一种可行的解决方案。
一、遗传算法的基本原理遗传算法是一种基于生物进化论的数学优化方法,其基本思想是利用模拟进化过程来实现搜索最优解的过程。
它主要分为个体编码、适应度评价、选择、交叉变异等步骤。
1. 个体编码:通过对问题的基因分析,将基因信息转换成计算机能够理解的二进制串形式;2. 适应度评价:将每个个体的适应度与问题的目标函数相关联,以从种群中选择更优的个体;3. 选择:依照某种规则从种群中选择适应度较高的个体,作为下一代种群的父代;4. 交叉:将选择出来的父代个体进行某种交叉,并生出新的个体;5. 变异:对新生出的个体进行一些突变操作,使其保持多样性,使问题的搜索空间得到充分探索。
二、遗传算法在机器人路径规划中的应用机器人路径规划的目的是使机器人在运动过程中满足各种条件限制,并求得最优的路径。
通常情况下,机器人路径规划可以分为两种:离线路径规划和在线路径规划。
离线路径规划是在机器人启动前进行计算得出一条完整路径,机器人启动后依据该路径依次完成任务。
而在线路径规划则是在机器人运动过程中实时规划路径。
基于遗传算法的机器人路径规划主要针对在线路径规划进行优化。
在路径规划过程中,遗传算法的个体编码可由机器人运动过程中的一系列状态向量组成,适应度评价可以根据走过的距离、时间等,采用多目标函数共同评价个体的适应度。
采用遗传算法进行在线路径规划的优点是,机器人可以在不同环境下自主搜索最优路径,具有一定的自学习能力,适应个性化工作环境,同时也可以保证机器人在复杂环境下的灵活、高效、安全性的运动。
基于遗传算法的机器人路径规划优化

基于遗传算法的机器人路径规划优化随着机器人技术的不断发展,机器人越来越广泛地应用于各个领域。
例如,机器人在工业制造、医疗、物流等领域中,具有很大的发展潜力。
机器人路径规划是机器人技术中非常重要的一个研究领域,优化路径规划可以使机器人执行任务更加高效、准确。
本文将介绍基于遗传算法的机器人路径规划优化的原理以及应用。
一、机器人路径规划的原理机器人路径规划是指机器人在执行任务时,从起点到终点的运动路径确定的问题。
机器人路径规划优化的目标是寻找一条最短或者最快的路径。
机器人路径规划优化的核心是在考虑机器人在路径中所感受到的环境情况,尽可能减小机器人所受到的阻碍。
因此,机器人路径规划优化的难点在于如何尽可能快地找到最佳的路径。
机器人路径规划的主要思想是在运动的过程中根据机器人感知到的环境信息作出决策。
当感知到环境信息发生变化时,机器人会按照事先设定的规则更新自己的运动状态,并重新计算路径。
在路径规划的过程中,需要考虑到机器人的动态特性,包括机器人的速度、加速度以及转弯半径。
机器人路径规划的过程中,需要不断的调整机器人的状态,以使其能够更快、更准确地达到终点。
二、遗传算法的优势在机器人路径规划优化中,遗传算法具有很大的优势。
遗传算法是一种全局优化算法,可以在搜索空间内找到全局最优解。
在机器人路径规划的过程中,由于机器人的转弯半径、速度等参数很难直接地计算,因此需要对这些参数进行优化。
遗传算法具有很好的全局搜索能力,能够有效的优化路径规划参数,从而使机器人达到最佳路径。
在遗传算法的优化过程中,需要构建适应度函数来评估路径规划的优劣。
适应度函数的目的是将路径规划的结果转化为一个标量指标,以便于相互间的比较。
适应度函数的定义对优化结果的好坏具有非常大的影响。
在路径规划优化中,适应度函数需要兼顾机器人的运动轨迹的短程和时间的长程,具有很强的合理性和实用性。
三、基于遗传算法的机器人路径规划优化的应用机器人路径规划优化的应用在工业生产、安防系统和物流等领域中非常广泛。
基于佳点集遗传算法的足球机器人策略设计
0 ≤ xi
( n)
( k ) ≤1 1 ≤ i ≤s
( 3) 对任一 Gs 中的点 r = ( r1 , …, rs ) 令 N n ( r) = N n ( r1 , …, rs ) 表示 Pn ( k ) 满足下面不等式组的点
的个数 :
计算机技术与发展 第 18 卷 第 11 期 Vol. 18 No. 11 2008 年 11 月 COMPU TER TECHNOLO GY AND DEV ELOPM EN T Nov. 2008
基于佳点集遗传算法的足球机器人策略设计
金 奎 ,程家兴 ,李志俊 ,饶玉佳
- 1 +ε
必须依托于某个足球机器人 。
( 3) 多重性 : 同一足球机器人可能在同一时期承担
多个不同的角色 ; 同一足球机器人也可能在不同时期 承担不同的角色[ 3 ] 。 足球机器人分为五种角色 : 守门员 ,前锋 ,后卫 , 左 翼和右翼 。 机器人的任务分为以下几种 :
( 1) 原地不动 ; ( 2) 调整角度 ; ( 3) 运动到指定地点 ; ( 4) 以某一角度踢球 。
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
计算机技术与发展 第 18 卷 ・ 124 ・
0 ≤ x i ≤1 i = 1 , 2 , …, s
0 ≤ xi
( n)
( k ) ≤1 ; i = 1 , 2 , …, s ;
r ∈Gs
N n ( r) - | r | | , 其中 | r | = r1 ・ n r2 …rs , ( n) 称为点集 Pn ( k ) 的偏差 。 ( n) = SU P |
基于遗传算法的机器人路径规划研究

基于遗传算法的机器人路径规划研究机器人的路径规划是人工智能领域的一个重要研究方向,通过设计合理的路径规划算法,可以让机器人有效地避开障碍物,快速到达目标位置。
遗传算法作为一种优化算法,被广泛应用于机器人路径规划研究中。
本文将介绍基于遗传算法的机器人路径规划的研究进展和相关方法。
一、遗传算法原理简介遗传算法是模拟自然界的生物进化过程,通过模拟遗传、突变、选择等操作,求解优化问题的近似最优解。
遗传算法的基本思想是将问题的解表示为染色体,然后通过交叉、变异等操作改变染色体,找到最优解。
在机器人路径规划中,可以将机器人的路径表示为染色体,每个染色体由一系列路径点组成。
目标是找到一条从起点到终点的最优路径。
二、基于遗传算法的机器人路径规划方法1. 初始化种群:根据机器人的环境和优化目标,生成初始种群,每个个体表示一条路径。
2. 适应度评价:根据路径长度、碰撞风险等指标,评估每个个体的适应度。
3. 选择操作:根据适应度的大小,选择部分个体作为父代,保留优秀的解。
4. 交叉操作:选取父代中的两个个体,通过交叉操作生成新的个体。
可以采用单点交叉、多点交叉等交叉方式。
5. 变异操作:对新生成的个体进行变异操作,引入一定的随机性,增加解的多样性。
6. 更新种群:将父代和后代合并,形成新的种群。
7. 重复执行3-6步骤,直到满足停止条件。
8. 获取最优解:从最终种群中选择适应度最高的个体作为机器人的最优路径。
三、实验结果与应用许多研究者通过实验验证了基于遗传算法的机器人路径规划方法的有效性。
例如,针对复杂的环境和多目标路径规划问题,研究者通过遗传算法得到了高效的路径规划方案。
此外,基于遗传算法的机器人路径规划也得到了广泛的应用。
在工业自动化领域,机器人路径规划是保证生产线高效运行的关键技术之一。
利用遗传算法可以快速求解复杂的路径规划问题,提高生产线的自动化水平。
四、存在的问题与展望尽管基于遗传算法的机器人路径规划方法在很多情况下表现良好,但仍然存在一些问题需要解决。
基于遗传算法的机器人路径规划

基于遗传算法的机器人路径规划机器人已经成为现代工业和生活的重要组成部分,广泛应用于自动化生产和服务领域。
机器人路径规划是机器人实现自主移动的重要技术之一,它可以帮助机器人避开障碍物,找到最短路径,提高机器人的运动效率和安全性。
而基于遗传算法的机器人路径规划是一种有效的解决方法,本文将对这一技术进行介绍和分析。
一、遗传算法概述遗传算法是一种启发式搜索算法,常用于求解复杂的优化问题。
遗传算法的基本思想是模拟生物遗传和进化过程中的基本原理,通过模拟交叉、变异、选择等遗传操作,不断地对种群中的个体进行进化,最终得到最优解。
遗传算法一般由以下步骤组成:1. 初始化种群:随机生成一组初始个体并形成初始种群;2. 适应度函数:根据问题的特定需求和目标,设计适应度函数评价每个个体的优劣程度;3. 选择操作:根据适应度函数的评价结果,选择优秀的个体参与下一代进化;4. 遗传操作:包括交叉和变异两种操作,交叉操作模拟生物交配和染色体交换,变异操作模拟基因突变。
5. 收敛判断:通过设定迭代次数或适应度函数的收敛精度,判断算法是否终止。
二、机器人路径规划中的遗传算法机器人路径规划一般可分为静态路径规划和动态路径规划两种,其中动态路径规划又可分为全局路径规划和局部路径规划。
全局路径规划是指在未知环境中,机器人需要从起点到终点找到一条最近、最短、最安全的路径。
全局路径规划一般采用比较复杂的路徑规劃算法解决,例如A*算法、Dijstra算法、基于遗传算法的路径规划算法等。
局部路径规划是指机器人在已知环境中,需要在运动中避开障碍物和遵守运动规则,实现安全有效的路径规划。
局部路径规划一般采用比较简单的算法解决,例如最近邻居算法、虚拟势场法、动态窗口算法等。
基于遗传算法的机器人路径规划一般应用于全局路径规划中,它可以不断优化机器人的行进路径,找到最优解。
具体过程如下:1. 环境建模:将机器人运动环境转化为网络图,确定起点和终点,将网格分为障碍物和可行走区域。
基于遗传算法的自主机器人路径规划优化研究

基于遗传算法的自主机器人路径规划优化研究随着人工智能技术的不断发展,自主机器人在各个领域的应用越来越广泛。
而机器人的路径规划是一个重要的问题,直接关系到机器人能否有效地完成任务。
传统的路径规划算法往往面临着计算复杂度高、无法适应复杂环境等问题,而基于遗传算法的自主机器人路径规划优化方法则能够很好地解决这些问题。
一、引言自主机器人路径规划问题是指根据机器人所处的环境,找到一条最优的路径使得机器人能够安全、高效地到达目标位置。
传统的路径规划方法多采用启发式算法或搜索算法,但由于环境的不确定性和复杂性,使得这些算法在某些情况下表现不佳。
因此,基于遗传算法的路径规划优化方法逐渐受到研究者的关注。
二、遗传算法简介遗传算法是模拟生物进化过程的一种优化算法。
其基本思想是通过模拟“适者生存、不适者淘汰”的生物进化过程,利用种群的遗传、变异和选择等操作,逐步搜索到最优解。
在自主机器人路径规划中,遗传算法可以通过优化路径的适应性函数,得到最优的路径规划结果。
三、自主机器人路径规划优化模型为了能够将遗传算法应用于自主机器人的路径规划中,首先需要建立相应的路径规划优化模型。
该模型包括环境模型、机器人模型和目标函数等几个重要部分。
其中,环境模型描述了机器人所处的环境,包括地图、障碍物等信息;机器人模型描述了机器人的运动能力和约束条件;目标函数则是用来评价路径的好坏。
四、路径规划优化过程1. 初始化种群:随机生成一定数量的路径个体,作为初始种群。
2. 适应性评价:根据目标函数评价每个个体的适应性。
3. 选择操作:根据适应性大小,选取部分优秀的个体作为下一代的父代。
4. 交叉操作:利用交叉算子对父代个体进行交叉得到子代。
5. 变异操作:对子代个体进行基因变异,增加种群的多样性。
6. 替换操作:根据适应性大小,用新的子代替换掉一部分较差的个体。
7. 终止判断:判断是否达到终止条件,如最大迭代次数或找到最优解。
8. 输出结果:输出最优路径作为机器人的路径规划结果。
基于遗传算法的机器人路径规划与优化
基于遗传算法的机器人路径规划与优化在现代工业生产以及社会生活中,机器人已经成为了一种不可或缺的存在。
它们可以在简单到人类懒得去做的任务中发挥巨大作用,也可以在高精度、高复杂度的生产过程中代替人类完成工作。
然而,在使用机器人的过程中,机器人的路径规划和优化问题也显得尤为重要。
机器人路径规划和优化问题最基本的要求是要保证机器人的路径是最优的。
如果机器人的路径不优,则会浪费大量时间和资源。
在优化机器人的路径时,机器人的运动能力、地形、环境等因素都需要考虑进去。
基于这些考虑,现代科技的发展引入了一种名为“遗传算法”的技术,来对机器人的路径规划和优化进行解决。
遗传算法是现代优化算法中最具代表性的一种算法技术,是一种基于自然进化的数学模型。
它借鉴了生物进化过程中的一些基本思想和算法,通过模拟进化过程来优化问题的解。
遗传算法的核心就是产生初始群体并通过不断的遗传、选择、变异等方式来优化群体的适应度,最终得到最优解。
在机器人路径规划和优化问题中,遗传算法可以通过以下步骤来实现:1. 适应度函数的定义适应度函数是遗传算法中最基本的函数。
在机器人路径规划和优化问题中,适应度函数的定义可以采用以下形式:F(x) = a * (distance / time) + b * collision_penalty其中,x 表示机器人路径的一组坐标点序列,distance 表示机器人行走的距离,time 表示机器人行走的时间,collision_penalty 表示机器人发生碰撞的次数,a 和 b 是权重系数。
2. 初始种群的生成在遗传算法中,初始种群需要随机产生。
在机器人路径规划和优化问题中,可以通过随机选择一组经过地图上随机点的坐标,来生成初始种群。
3. 选择操作选择操作是从种群中选择一部分个体进行后代产生过程。
在机器人路径规划和优化问题中,可以采用“轮盘赌选择”策略进行选择,即将每个适应度与总适应度之比作为轮盘的一个区间,然后按照随机数在轮盘上指向的区间中进行选择。
遗传算法在机器人路径规划中的应用
遗传算法在机器人路径规划中的应用机器人的出现减轻了人们的工作负担,但是机器人在运行时需要遵循一个特定的路径,这是一个非常重要的问题。
传统的路径规划方法固然有很好的效果,但是在一些更为复杂的情况下,就很难保证其有效果。
这时候就需要通过新的技术来解决问题。
遗传算法是一种非常有效的技术,它可以避免路径规划的局限性,展现了非常好的效果。
本文旨在介绍遗传算法在机器人路径规划中的应用。
一、遗传算法简介遗传算法是一种优化算法,它模拟生物进化过程中的自然选择、交叉和变异等现象,通过数字化的形式,对问题进行求解。
遗传算法的基本流程包括种群初始化、适应性函数定义、选择算子、交叉算子、变异算子、迭代终止等。
它的基本思想是将每一个解想象成一个染色体,然后对于染色体进行选优和交叉变异,从而找到更适合求解问题的解。
在机器人路径规划中,这些解就表示了机器人运动的路径,而遗传算法则是看做一种求解路径规划问题的最有效手段。
二、遗传算法在机器人路径规划中的应用路径规划是机器人技术中的一个关键问题,因为路径的规划好坏直接影响着机器人的工作效率和准确性。
遗传算法在机器人路径规划中的应用主要包括三个方面,即路径规划、避障和跟踪控制等。
1. 路径规划在机器人路径规划中,遗传算法可以用于求解全局路径,避免了路径规划时的局限性。
传统的路径规划方法往往只考虑局部最优解,而无法提供全局规划的解决方案。
而通过运用遗传算法,机器人可以获得整体路径的规划信息,将机器人定向到全局的最优解之中,使得整个路径规划可以达到更高效的水平。
2. 避障除了路径规划之外,机器人还需要避免各种障碍物。
在机器人行动过程中,障碍物是一个非常常见和重要的问题,并且这种问题往往需要高效的解决方案。
遗传算法就是非常适合来解决这种避障问题的一个算法。
在遗传算法中,通过设定适应度函数来评估每个路径的优劣,对于一些障碍物,可以在适应度函数中加入相应的惩罚值,从而将避障问题转化为一种路径规划问题。
基于遗传算法的路径规划算法在机器人导航中的应用
基于遗传算法的路径规划算法在机器人导航中的应用路径规划在机器人导航中起着至关重要的作用,能够有效地帮助机器人找到最优的路径以完成任务。
而基于遗传算法的路径规划算法则为机器人导航带来了更加高效和准确的解决方案。
本文将探讨基于遗传算法的路径规划算法在机器人导航中的应用,以及其优势和局限性。
一、基于遗传算法的路径规划算法概述基于遗传算法的路径规划算法借鉴了进化生物学中的遗传、交叉和变异等概念,通过模拟自然界的进化过程来寻找最优路径。
它将问题抽象成染色体、个体和基因等概念,并使用适应度函数来评估每个个体的适应程度。
通过选择、交叉和变异等操作,不断优化个体的染色体,最终找到最佳路径解。
二、1. 环境建模基于遗传算法的路径规划算法可以应用于机器人导航中的环境建模。
通过对机器人所处环境的建模,将整个环境分为离散的区域,并将路径规划问题转化为在这些离散区域中寻找最优路径的问题。
遗传算法可以利用交叉和变异的操作,不断改进个体染色体的组合方式,从而找到最佳路径。
2. 避障规划在机器人导航中,避障是一个非常重要的问题。
基于遗传算法的路径规划算法可以帮助机器人找到避开障碍物的最短路径。
通过适应度函数的评估,可以选择出适应程度最高的个体,并对其进行交叉和变异操作,从而生成新的个体来寻找避障的最佳路径。
3. 复杂环境下的导航在复杂的环境中,机器人导航往往面临着更多的挑战和困难。
基于遗传算法的路径规划算法可以帮助机器人在复杂环境中找到合适的路径。
通过不断进化和优化,遗传算法可以帮助机器人克服复杂环境的限制,找到最佳路径达到目标点。
三、基于遗传算法的路径规划算法的优势1. 具有全局搜索能力基于遗传算法的路径规划算法具有全局搜索能力,可以在整个搜索空间中寻找最优解。
相对于其他局部搜索算法,遗传算法可以更好地避免陷入局部最优解而错过全局最优解。
2. 适应性强遗传算法可以根据每个个体的适应度来评估其好坏程度,并根据适应度选择优秀个体进行下一步的遗传操作。
基于遗传算法的足球机器人动态避障路径规划
硕士学位论文THESIS OF MASTER DEGREE 论文题目:基于遗传算法的足球机器人动态避障路径规划(英文:Genetic Algorithm Based Dynamic Obstacle Avoidance And Path Planning For A soccer Robot作者:方惠蓉指导教师:杨楠、副教授2009年 12月 20 日论文题目:(中文基于遗传算法的足球机器人动态避障路径规划(外文 Genetic Algorithm Based Dynamic ObstacleAvoidance And Path Planning For A Robot 所在院、系、所 :信息学院专业名称 :计算机应用技术指导教师姓名、职称 :杨楠、教授论文主题词:足球机器人;路径规划;遗传算法;障碍物;自适应度函数学习期限 : 2006年3月至2009年12月论文提交时间: 2009年12月 20 日独创性声明本人郑重声明:所呈交的论文是我个人在导师指导下进行的研究工作及取得的研究成果。
尽我所知,除了文中特别加以标注和致谢的地方外,论文中不包含其他人已经发表或撰写的研究成果,也不包含为获得中国人民大学或其他教育机构的学位或证书所使用过的材料。
与我一同工作的同志对本研究所做的任何贡献已在论文中作了明确地说明并表示了谢意。
签名:方惠蓉日期:2009.11.16关于论文使用授权的说明本人完全了解中国人民大学有关保留、使用学位论文的规定,即:学校有权保留送交论文的复印件,允许论文被查阅和借阅;学校可以公布论文的全部或部分内容,可以采用影印、缩印或其他复制手段保存论文。
签名:方惠蓉导师签名:杨楠日期:2009.11.16摘要移动机器人越来越多地应用到各个行业中,移动机器人具有高度自规划、自组织和自适应能力,适合于工作于复杂的非结构化环境中,路径规划是机器人技术研究领域中的核心问题,它的任务就是在具有障碍物的环境中,按照一定的标准(路径最短、时间最快或能量消耗最少等,寻求一条从已知点到已知终点的具有最低代价的无碰(较优路径。
基于遗传算法的机器人路径规划
4.3 基于遗传算法的机器人路径规划4.3.1 遗传算法简介[50] [51]在1975年前后,美国Michigan大学John H Holland教授根据达尔文的适者生存的进化理论研究出一种人工智能的方法——遗传算法,这种算法以生物进化、遗传原理来设计算法的原理,在算法里面还添加了统计理论学随机过程等数学方法,最终形成了该算法一种独特的理论。
遗传算法在求解时,先从一个初始群体的变量开始,依次求解出最佳解,最后得出满足预设的算法要求的迭代次数为最后结果。
这种算法是迭代算法的一种。
遗传算法是模拟大自然中生物生存的理念而产生的一种自然选择和群体遗传理论的查找式算法。
在这个算法里面把每一个需要求解决的问题尽量编码设计成“染色体”,多个染色体接着可以形成种群,在这个过程会出现选择、变异、交叉、复制等遗传操作。
遗传算法初始设定时,首先随机产生一个初值即一个种群,然后依照算法的函数对种群内的个体进行处理评估,并产生相应的对环境适应度数值。
接着算法会根据这些适应度值选择优秀的个体进行下一代衍生,然后把选出来的优秀进行变异、交叉处理。
目前在机器人的路径设计里面遗传算法得到广泛的应用,而且应用范围不仅在单个机器人的行进里面,而是在多个机器人的合作里面也有广泛应用,并且都取得不错的效果。
遗传算法是一种鲁棒性的应用于复杂系统优化的查询式算法,遗传算法与其他只能优化算法相比时,他有以下特点:(1)把决策变量编码化,以一编码做算法处理的对象。
(2)在算法里面以计算出的适应值为查询其他数据的信息。
(3)遗传算法的查询过程从一个种群开始查询,而不从一个一个体开始。
(4)遗传算法的查询是一种依据概率查询,而非确定值查询。
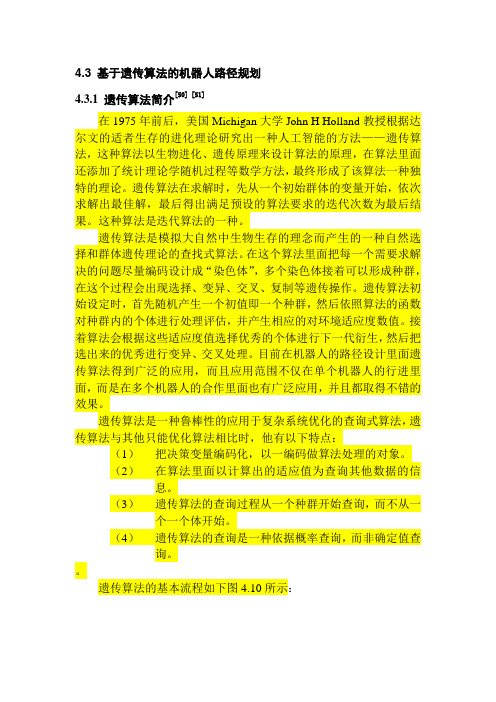
遗传算法的基本流程如下图4.10所示:图4.10 基本遗传算法的流程图4.3.2利用遗传算法进行路径规划4.3.2.1 规划空间的栅格法建模假设机器人工作空间为二维结构化空间, 障碍物位置、大小已知, 且在机器人运动过程中, 障碍物的位置、大小均不发生变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用遗传算法进行路径规划
遗传算法流程
操作 .变量 与个体之间映射 是通过编
码 来 实 现 的 。 用十 进 制 栅 格 序 号 表 示
I , = o c + p
其中,L 为足球机器人的边长 ,
分别为较大和较小的轮速 ,
, 、
路径节点 ,用 栅格序列表示 一条染色
图4 最大遗传代数为 1 0 0
图5 最大遗传代数为3 0 0
度和 角速 度 ,或 者是 和
此 ,必 须 增 加 如 下 约束 方程 :
。因 图6 最大遗传代数 为4 0 0
匀 减 速 直 线 运 动 。表 示 如 下 :
图7 最大遗传代数 为6 0 0
得到广泛应用 。
An a l y s i s o f Am p l i f y — - a n d — - f o r wa r d Co ob e r a t i v e Ne t wo r k s wi t h
中 ,还 是 在 单 源 单 宿 多 中 继 系 统 中 ,
本方法都适用 。
f R: ( + ) / 2 ( 一 ) 其中, 、 , 、 表示足球存
( 4 ’ 表示足球在f
—
1 )初始群体生成 初始种群为随 机生成的 、从 出发
点 到 目标 点 的 任 意 一 条 可 行 路 径 的 集
{ 1 ( i ) : l J
R+ L  ̄ 2 l姿为P = 卜 , Y , = I , 速度为V, 左
0
∞
潞
∞
赫
蛳
x l F c o s 0 0 ] v ; ]㈩
Q = 『 l 2 2 ] l ( 2 )
0 但 是 控 制 分 量 却 只 有 两 个 :-  ̄L m _
有外 力的作用下 ,足 球所做的运动 是 全局最优解等 特点 ,在众 多学 科领域
4 )遗传操作
下转3 6 》
_ -— _ ● I l 2 9 重 孑痤品时承 2 0 1 3 . 2 w ww. e e p w. c o n. r c n
责任编辑 :万狮
Co mm u n i c a t i o n s& Ne t wo r ks
系统实现 。不管在 多用户多 中继网络
1 一 :
¨
^ - v s¨ |
. ’ ’
杂 度 ,方 便 于 系 统 实 现 。匝 渤
参考文献 :
川 F M Meh b o o b a n d U Mu r a t On Re l ay Sel e c t i o n f o r D e c o d e — e n d - f o r w a r d R e l a y i n g [ J 1 I E E E T r a n s o n Wi r e l e s s c 0 m mu n . 2 0 0 9 . 8 . ( 7 ) : 3 3 4 1 — 2 2 4 6 [ 2 ] T Mo h a mma d, A We s s a m a nd H Da v i d P e r f o r ma n c e
f X : R s i n p c 。 s ( 仪 。 + p / 2 ) + X 。
{ = R s i n p c o s ( a c + p / 2 ) + ( 5 )
示 由 摩 擦 力 产 生 而 的 加 速 度 , A t 表
示时间间隔,0 f _ 1 表示足球在f _ 时刻
x s i n 0 一 v c o s O : 0( 3 )
动 ,其 运 动 学 模 型 表 示 如 下 :
I 【 / ~ I + △
{ = X H+ ” ' A t c o s O 1 ( 6 )
用遗传算法进行路 径规划 ,其流
程如下 :
足 球 机 器 人 可 看 作 直 线 或 曲 线 运 【 : 一 。 + A t s i n 0
小球运动学模型
照一定的操作 规则 ,不断进行 迭代计
算 ,最 终 逐 步 逼 近 最 优 解 。 它 具 有 智 总 数 ,D为 该 个 体 中相 邻 序 号 之 间 的
足 球 只 能 做 直 线 运 动 ,并 且 在 没 能 化 搜 索 、 并 行 化 算 法 、 通用 性 强 和 直 线 距 离 之 和 。
体 染色体为不定长染色体。 3 )适应值计算
遗 传 算 法 是 一种 智 能 化 搜 索 寻 为机器人 当前的坐标 , 。 为 优技术 它从 某一初始群体 出发 ,按
。
F = 1+ 1 /√ ( n — I ) D ( 7 )
式 中 n 为该 个体 所通 过的 栅格
机器人 当前 的方 向角 。
I = R5
O g 5
r l Rs
0 9
。8 5
文献 [ 1 O ] 方案F R S 的 中 继 集 合 寿 命 曲 线 下 降 得 快 ,随 着 用 户 个 数 的 增 加 ,中 继 集 合 寿 命 很 快 逼 近 零 ,而 本 文所 提出的改 进型方案的 中继集合寿
I
f 时 刻 的 运 动 状 态 , , X H , ~ - 合 。初始群体 的规 模大小将会影 响到
l 时刻 的 运 动状 态 ,0 c 表 遗 传算法收 敛的速度和精度准 确性 。 2 )染 色 体 编 码 遗 传 算 法 是 对 个 体 的 基 因 进 行
l B : ( I ) T
s
0 8
R e l a y S e l e c t i o n o v e r R a y l e i g h F a d i n g C h a n n e l s [ C ] i n P r o c