ZAPI(萨牌)控制器ACE2 重要参数以及调试步骤
萨奥使用手册说明(调试)
1.使用手册说明该手册含概了对操作方法的说明,它对于了解如何安装和操作该装置是十分必要的。
本手册是为最终用户/顾客服务的。
该手册及其所有相关文件是由明尼阿波利斯市的Sauer-Danfoss公司编写并将由该公司享有改进维护的权力。
所有的改动将和Sauer-Danfoss公司同步。
2.修改记录3.机器图片4.操作说明4.1 概述该系统的输入值包括一个内含行驶速度电位计的FNR控制手柄,一个最大行驶速度的电位计,和一个转向电位计。
在两个驱动马达上的速度信号以脉冲的形式反馈给控制器。
还有开关输入,可以实现行驶/摊铺模式,停车制动状态,高/低速空转状态,和标准模式状态。
系统输出由四个单向阀驱动装置构成。
机器的每一条履带都有一个相应的向前和向后的阀驱动器。
这些驱动的双盘绕的EDC阀安装在泵上。
还有一个RS232的连续端口,它一般用来驱动2x24字符文字显示器,为操作者提供信息。
这种一样的连续端口可以交替的与膝上型电脑连接运行WebGPL。
最大行驶速度电位计的位置,将会为摊铺机设定允许的最大摊铺速度。
这是一个正常最大行驶速度的百分值。
正常最大行驶速度取决于系统处于摊铺还是空行驶模式。
空行驶模式时,两个马达处于最小排量的位置。
摊铺模式时,两个马达处于最大排量的位置。
在所有操作模式下,FRN手柄将会选择一个行驶方向和一个最大值的百分数,从而使其得到一个综合的行驶速度。
行驶电位计将为控制系统提供一个行走命令。
当电位计处于中点时,将没有行驶方向的命令,这时摊铺机将会以直线行驶。
以反时针方向转动电位计将会使摊铺机向左行驶。
左边的履带会减速而右边的履带会加速的程度取决于电位计被旋转多少。
这会保持一个连续的行驶速度。
如果右边履带达到最大速度,而且不能再增加,在这种情况下,随着行驶命令的增加,左边履带会继续减速,而右边履带一直以最大速度行驶。
于是整机的速度随之改变。
如果左边履带倒退,机器进入反旋转模式。
如果以顺时针方向旋转电位计,右边履带也会出现相同情况。
详细的APM飞控调试资料
调整ArduCopter 参数如果你使用的机身不是官方ArduCopter 套件,你可能需要改变一些PID设置(PID 是比例-积分- 微分的简称,是一个标准的控制方法。
更多的资料在这里)。
在此页底部的有一个PID的全面的指导.你可以在任务规划器的配置选项卡中以交互方式调整PID:基本性能故障排除•我的多旋翼在稳定模式下缓慢震荡(大幅运动): 降低 STABILIZE_ROLL_P,STABILIZE_PITCH_P.•我的多旋翼在稳定模式下***震荡(小幅运动): 降低 RATE_ROLL_P, RATE_PITCH_P。
•我的飞机过于迟钝:降低 RATE_ROLL_P,RATE_PITCH_P,和/或增加 STABILIZE_ROLL_P, STABILIZE_PITCH_P.•我调整了 Rate_P,还是不行:也许你的 STABILIZE_P gain 增益过高。
降低一点(见上文),并再次尝试调整 RATE_P.•我的飞机在起飞时向左或向右旋转15°:你的电机不直或着电调没有校准。
扭转电机,直到他们都直了。
运行ESC校准程序。
•激烈飞行后我的飞机偏向一方 10 - 30°:如该文所述,焊接 IMU 的滤波器U。
你可以在 system.pde 里调整漂移校正。
如果需要,大概调高0。
5.此外,降落30秒,然后继续飞行。
•我的飞机无法在空中保持完全静止:确保在飞机的重心在正中心。
然后在水平面上运行水平命令(保持关闭状态15秒,调用该功能).你也可以在无风的环境(重要)使用自动微调模式飞行。
任何风将导致四轴旋转180度后你的修改产生相反的作用。
你可以使用遥控俯仰和横滚微调,但记得在用配置工具设置遥控时,要把它们放回中心.我不喜欢使用发射微调,但永远不要使用偏航微调.(四轴也很容易受到紊流的影响。
他们将需要不断的修正,除非你安装一个光流传感器。
某天……)•我的飞机飞行很好,但后来在悬停时一条电机臂奇怪地下降了:你的电机坏了。
压力开关调试方法与注意事项
压力开关调试方法与注意事项
哎呀呀,压力开关调试可不能瞎搞哦!要想让它精准有效地工作,那调试方法可得掌握好呀,就像给精密仪器校准一样。
你瞧,要是随便弄弄,那不就影响整个系统的运行啦!
嘿,记住啦,调试之前一定要仔细检查相关设备和线路,这可不是走过场呀,任何小细节都不能放过呢!比如看看接口有没有松动,不然到时候出了问题可就麻烦大啦。
哇塞,调试的时候,参数设置可得小心谨慎呀!别大大咧咧的,难道能任由错误的参数存在吗?一定要按照标准和实际需求来设定呀。
你想想看,要是调试过程中不注意安全操作,那不就像在悬崖边跳舞一样,随时会有危险的呀。
所以一定要遵守安全规范哟!
哎呀,别频繁地随意更改调试好的参数呀,让它稳定运行不好吗?就像搭好的积木别轻易推倒呀。
压力开关调试可不能敷衍了事呀,这可不是闹着玩的。
你能随便对待重要的工作任务吗?当然不能呀,那调试压力开关也一样呀!
嘿呀,要是发现调试过程中有异常情况,千万别忽视呀,赶紧排查解决。
这就跟发现身体不舒服要及时就医一样,难道还能拖着不管呀!
听好了哦,调试压力开关要用心,就像对待珍贵的艺术品一样。
给它创造合适的条件,让它发挥最佳性能,你能做到吗?
总之啊,压力开关的调试方法和注意事项一定要牢记哦,别等出
了问题才追悔莫及。
要好好对待这个关键的部件呀!。
ZAPI控制器ACE2重要参数以及调试步骤
ZAPI控制器ACE2重要参数以及调试步骤ZAPI(萨牌)控制器ACE2是一种电动车辆控制器,广泛应用于电动叉车、电动高尔夫车、电动搬运车等各种类型的电动车辆中。
下面将介绍ZAPI控制器ACE2的重要参数以及调试步骤。
一、重要参数1.输出功率:ZAPI控制器ACE2的输出功率是指控制器能够输出的最大功率。
根据具体的应用需要,选择适当的输出功率可以确保电动车辆的驱动性能满足要求。
2.控制模式:ZAPI控制器ACE2支持多种控制模式,包括速度控制、扭矩控制、电流控制等。
不同的控制模式可实现不同的驱动方式,根据具体的应用需求选择合适的控制模式。
3.电压范围:ZAPI控制器ACE2的电压范围表示控制器能够适应的输入电压范围。
根据电动车辆的电池电压,选择适当的控制器电压范围可以确保控制器与电池之间的匹配性。
4.特殊功能:ZAPI控制器ACE2具有一些特殊功能,如再生制动、防滑控制、故障诊断等。
根据具体的应用需求,可以选择是否使用这些特殊功能。
二、调试步骤1.准备工作:在进行ZAPI控制器ACE2的调试之前,首先要确保电动车辆的电气系统连接正确,电池正负极与控制器的正负极正确连接。
2.参数设置:使用ZAPI控制器ACE2的调试软件,将相关参数设置为合适的数值。
包括输出功率、控制模式、电压范围等参数。
根据具体的应用需求,可以进一步设置特殊功能的参数。
3.驱动测试:将ZAPI控制器ACE2与电动车辆的驱动系统连接,进行驱动测试。
在测试过程中,可以通过软件调整相关参数,观察电动车辆的行驶性能,调整至满足要求的状态。
4.故障诊断:如果在测试过程中发现电动车辆存在异常情况,如无法启动、行驶异常等,可以使用ZAPI控制器ACE2的故障诊断功能进行故障排查。
根据故障代码或报警信息,找到故障原因,并进行相应的维修和调整。
5.优化调整:在进行驱动测试的过程中,可以根据实际需求进行参数调整,以优化电动车辆的驱动性能。
例如,调整速度曲线使得加速度更平滑,提高行驶的舒适性。
萨牌双交流电控DUAL-AC2说明书

目录1 简介2 规范2.1D U A L A C2的技术规范 52.2D U A L A C2&H P的技术规范 62.3D U A L A C2P O W E R(加强型)的技术规范72.4D U A L A C2&H P P O W E R(加强型)的技术规范82.5控制单元82.5.1微动开关82.5.2加速单元82.5.3其他模拟控制单元92.5.4速度反馈92.5.5转向角传感器10 2.6保护特性11 2.7操作特性12 2.8故障诊断13 2.9热保护措施13 2.10常规问题的解决和防范13 2.11磁化和磁辐射13 2.12主接触器和应急开关14 3安全和保护14 4、安装144.1连接电缆14 4.2接触器15 4.3熔断器15 4.4“D U A L A C2”和“D U A L A C2”加强型的接线说明15 4.5“D U A L A C2”和“D U A L A C2&H P”加强型的接线说明174.6编码器安装194.7C A N B U S连接器的结构194.7.1单个D U A L A C2控制器194.7.2“D U A L A C2”作为C A N B U S网络的终端模块204.7.3“D U A L A C2”作为循环模块接入C A N B U S网络204.8电源接线图214.8.1“D U A L A C2”214.8.2“D U A L A C2加强型”224.8.3“D U A L A C2&H P”234.8.4“D U A L A C2&H P加强型”244.9机械图254.10“D U A L A C2”和“D U A L A C2加强型”标准接线图294.11“D U A L A C2&H P”和“D U A L A C2&H P加强型”标准接线图305、利用手持单元的编程及调整315.1使用手持单元调整31 5.2手持单元及连接器接线的描述315.3标准手持单元菜单的介绍32 5.3.1“D U A L A C2”和“D U A L A C2加强型”菜单结构325.3.1a主菜单325.3.1b从菜单335.3.2“D U A L A C2&H P”和“D U A L A C2&H P加强型”菜单设置345.3.2a主菜单345.3.2b从菜单355.4功能设置35 5.4.1“D U A L A C2”和“D U A L A C2加强型”—主控制部分35 5.4.2“D U A L A C2”和“D U A L A C2加强型”—从控制部分375.4.3“D U A L A C2&H P”和“D U A L A C2&H P加强型”—主控制部分功能38 5.4.4“D U A L A C2&H P”和“D U A L A C2&H P加强型”—从控制部分功能385.5参数调节40 5.5.1“D U A L A C2”—主控制部分40 5.5.2“D U A L A C2”—从控制部分41 5.5.3“D U A L A C2&H P”—主控制部分415.5.4“D U A L A C2&H P”—从控制部分425.6可编程的控制器的功能46 5.6.1功能设置(参见 5.4)465.6.2参数编程(参见 5.5)465.6.3“D U A L A C2&H P”和“D U A L A C2&H P加强型”测试465.6.4“D U A L A C2&H P”和“D U A L A C2&H P加强型”测试475.6.5储存功能(存储数据)—仅适用于P C控制47 5.6.6复制功能(下载参数用于其他控制)—仅适用于P C手持单元47 5.6.7显示最后5次报警信息,连同小时计值,温度一起显示47 5.6.8加速器范围整定48 5.6.9参见手持单元手册对于功能和参数的详细说明485.7A C牵引逆变器设置顺序485.8测试功能描述48 5.8.1“D U A L A C2”和“D U A L A C2加强型”—主控制部分495.8.2“D U A L A C2”和“D U A L A C2加强型”—从控制部分50 5.8.3“D U A L A C2&H P”和“D U A L A C2&H P加强型”—主控制部分515.8.4“D U A L A C2&H P”和“D U A L A C2&H P加强型”—从控制部分526、其他功能54 6.1保存和复制功能54 6.2报警菜单描述54 6.3手持单元整定加速器操作过程557、“D U A L A C2”和“D U A L A C2&H P”故障诊断56 7.1和牵引相关的错误编码56 7.2手持单元显示的关于牵引相关的报警分析60 7.3和泵斩波器相关的故障编码647.4手持单元显示的关于油泵方面的报警分析658、推荐使用部件659、定期维护67= 凡标注此记号的章节是和安全相关的内容公司DEPT.设备执行经理工程执行部分出货管理员出版物编号:版本1 简介ZAPIMOS系列中的DUAL AC2逆变器适合用于3—7KW一对电机控制。
压力开关的调试方法
压力开关的调试方法压力开关是工业自动化控制系统中常用的一种开关装置,它可以根据管路中液体或气体的压力变化来实现电路的开闭。
在实际应用中,压力开关的调试显得尤为重要,因为它直接影响到整个控制系统的稳定性和可靠性。
本文将从以下几个方面详细介绍压力开关的调试方法。
一、检查电源和线路在进行压力开关调试之前,需要先检查电源和线路是否正常。
首先要检查电源是否接通,并且电压是否稳定;其次要检查线路是否连接正确,是否有松动或接触不良等问题。
如果发现电源或线路存在问题,需要及时排除故障。
二、设置合适的压力值在进行压力开关调试时,需要先设置合适的压力值。
这个值应该根据具体情况来确定,一般可以参考设备说明书或者咨询生产厂家。
如果没有相关资料可供参考,可以根据实际需求来设置一个合理的值。
三、检查机械部分在进行压力开关调试之前,还需要对机械部分进行检查。
首先要检查机械部分是否安装正确,是否有松动或变形等问题;其次要检查机械部分的灵敏度是否符合要求,可以通过手动操作来测试。
四、调整电气参数在完成上述步骤之后,就可以开始进行电气参数的调整了。
首先要确定压力开关的触发点和复位点,这个可以通过手动操作来测试;其次要调整触发点和复位点的误差范围,使其达到最佳状态。
五、测试压力开关在完成以上步骤之后,需要对压力开关进行全面测试。
首先要测试压力开关的响应速度和稳定性,可以通过改变压力值来进行测试;其次要测试压力开关的重复性和精度,可以通过多次测试来验证。
六、记录数据和问题在完成所有测试之后,需要将数据记录下来,并且对存在的问题进行总结。
如果发现存在问题,需要及时采取措施进行修复或更换。
七、定期维护在完成以上步骤之后,还需要定期对压力开关进行维护。
这个包括清洗机械部分、检查线路连接、校准电气参数等方面。
只有定期维护才能保证设备长期稳定运行。
总结:以上就是压力开关的调试方法,通过以上步骤可以保证压力开关的稳定性和可靠性。
在实际应用中,还需要结合具体情况进行调整和优化。
ZAPI表调整说明 叉车资料
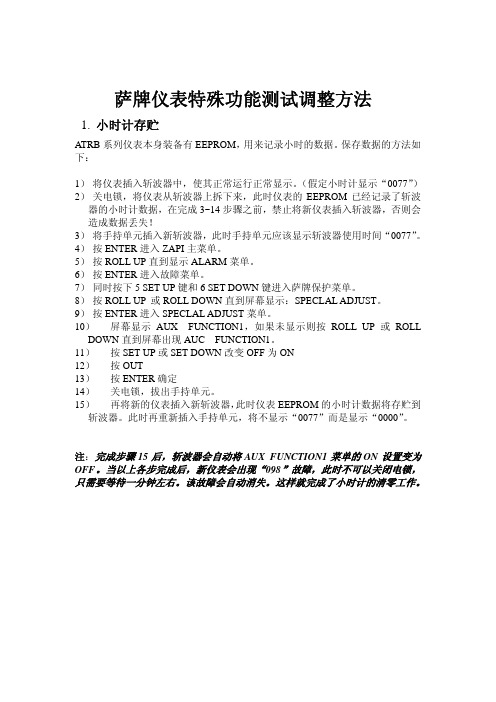
萨牌仪表特殊功能测试调整方法1. 小时计存贮ATRB系列仪表本身装备有EEPROM,用来记录小时的数据。
保存数据的方法如下:1)将仪表插入斩波器中,使其正常运行正常显示。
(假定小时计显示“0077”)2)关电锁,将仪表从斩波器上拆下来,此时仪表的EEPROM已经记录了斩波器的小时计数据,在完成3~14步骤之前,禁止将新仪表插入斩波器,否则会造成数据丢失!3)将手持单元插入新斩波器,此时手持单元应该显示斩波器使用时间“0077”。
4)按ENTER进入ZAPI主菜单。
5)按ROLL UP直到显示ALARM菜单。
6)按ENTER进入故障菜单。
7)同时按下5 SET UP键和6 SET DOWN键进入萨牌保护菜单。
8)按ROLL UP 或ROLL DOWN直到屏幕显示:SPECLAL ADJUST。
9)按ENTER进入SPECLAL ADJUST菜单。
10)屏幕显示AUX FUNCTION1,如果未显示则按ROLL UP或ROLL DOWN直到屏幕出现AUC FUNCTION1。
11)按SET UP或SET DOWN改变OFF为ON12)按OUT13)按ENTER确定14)关电锁,拔出手持单元。
15)再将新的仪表插入新斩波器,此时仪表EEPROM的小时计数据将存贮到斩波器。
此时再重新插入手持单元,将不显示“0077”而是显示“0000”。
注:完成步骤15后,斩波器会自动将AUX FUNCTION1菜单的ON设置变为OFF。
当以上各步完成后,新仪表会出现“098”故障,此时不可以关闭电锁,只需要等待一分钟左右。
该故障会自动消失。
这样就完成了小时计的清零工作。
2.电瓶电量放电曲线修正1)按ENTER进入ZAPI主菜单2)按ROLL UP直到显示ALARM菜单3)按ENTER进入故障菜单4)同时按下5键和6键进入萨牌保护菜单5)按ROLL UP或ROLL DOWN直到屏幕显示:SPECIAL ADJUST6)按ENRER进入SPECIAL ADJUST菜单7)屏幕显示AUX FUNCTION18)按ROLL UP或ROLL DOWN直到出现ADJUSTMENT#01和ADJUSRMENT#029)按SET UP或SET DOWN改变ADJUSTMENT#01和ADJUSTMENT#02的LEVEL值10)按OUT11)按ENTER确定ADJUSTMENT#01 修正电瓶电量100%~90%的上限值。
ZAPI(萨牌)控制器ACE2 重要参数以及调试步骤
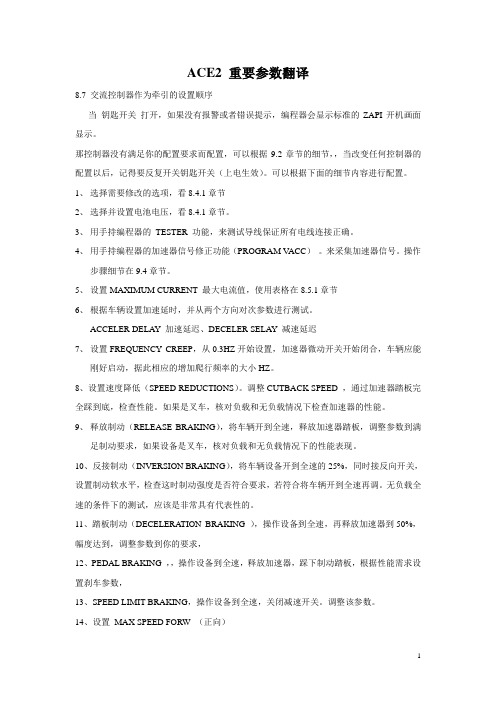
ACE2 重要参数翻译8.7 交流控制器作为牵引的设置顺序当钥匙开关打开,如果没有报警或者错误提示,编程器会显示标准的ZAPI开机画面显示。
那控制器没有满足你的配置要求而配置,可以根据9.2章节的细节,,当改变任何控制器的配置以后,记得要反复开关钥匙开关(上电生效)。
可以根据下面的细节内容进行配置。
1、选择需要修改的选项,看8.4.1章节2、选择并设置电池电压,看8.4.1章节。
3、用手持编程器的TESTER 功能,来测试导线保证所有电线连接正确。
4、用手持编程器的加速器信号修正功能(PROGRAM V ACC)。
来采集加速器信号。
操作步骤细节在9.4章节。
5、设置MAXIMUM CURRENT 最大电流值,使用表格在8.5.1章节6、根据车辆设置加速延时,并从两个方向对次参数进行测试。
ACCELER DELAY 加速延迟、DECELER SELAY 减速延迟7、设置FREQUENCY CREEP,从0.3HZ开始设置,加速器微动开关开始闭合,车辆应能刚好启动,据此相应的增加爬行频率的大小HZ。
8、设置速度降低(SPEED REDUCTIONS)。
调整CUTBACK SPEED ,通过加速器踏板完全踩到底,检查性能。
如果是叉车,核对负载和无负载情况下检查加速器的性能。
9、释放制动(RELEASE BRAKING),将车辆开到全速,释放加速器踏板,调整参数到满足制动要求,如果设备是叉车,核对负载和无负载情况下的性能表现。
10、反接制动(INVERSION BRAKING),将车辆设备开到全速的25%,同时接反向开关,设置制动软水平,检查这时制动强度是否符合要求,若符合将车辆开到全速再调。
无负载全速的条件下的测试,应该是非常具有代表性的。
11、踏板制动(DECELERATION BRAKING ),操作设备到全速,再释放加速器到50%,幅度达到,调整参数到你的要求,12、PEDAL BRAKING ,,操作设备到全速,释放加速器,踩下制动踏板,根据性能需求设置刹车参数,13、SPEED LIMIT BRAKING,操作设备到全速,关闭减速开关。
塔机黑匣子调试说明
塔式起重机安全保护装置调试说明书目录第一章安全操作规程第二章安装操作步骤第三章调试操作规程第四章常见故障及处理方法第三章调试操作规程出厂之前,如果用户未加说明,我们的产品是未配置任何塔机参数和控制参数的,当用户在使用本产品以前,需要使用我们提供的专门的配置程序先进行系统配置,之后才能正常使用本产品.3.1 软件主界面检查系统各部分连接无误,供电电压正常,接通KINCO-TB-AAA-000型塔式起重机安全保护装置主机电源,系统就开始启动,经过一系列自检动作和启动动作,即可进入软件运行界面,运行界面如下:主界面点击界面的右下角位置,进入【设置选定】界面3.2 参数设定1.2.1点击主页面的右下角位置,选择“基本设置”,通过密码验证即可进入“参数设定”画面,如下图1.2.2 曲线设定:此设定须由厂家指定或经专业培训合格的人士操作。
非专业人士请勿私自修改。
1.2.3 幅度标定:当塔机初次使用或重新拆装后,需要进行幅度标定操作.幅度标定操作是用来确定小车幅度和幅度传感器采集数据对应关系的方法.具体操作如下:1.请驾驶员配合,将小车移动到大臂根部最小幅度处(无需吊重),2.此时触摸屏上的“”应在800-1500之间,如果不在此围,请将幅度传感器的销子拨掉,用手转动限位器,直到源数据在此围。
注意: 当小车变幅时,应该看到页面上“源数据”的数值有规律变大或者变小,如果此值无变化或者变化无规律,请联系厂家解决.3.插上幅度限位器的销子,设定幅度最小点(最小点为塔机组织中心到吊钩中心的距离),然后点击后面的。
4.将小车移动到塔臂的最前端(此时源数据应变大),此时在标定点和总长度里输入塔臂的实际长充,然后点击后面的。
5.设定报警参数,如下图最大幅度和最小幅度的设定以小车不冲出去为限。
1.2.4高度标定:当塔机初次使用或升高标准节后,需要进行高度标定操作.高度标定操作是用来确定吊钩高度和高度传感器采集数据对应关系的方法。
控制器说明书

目录1 简介2 规范2.1 DUALAC2的技术规范 5 2.2 DUALAC2&HP的技术规范 6 2.3 DUALAC2 POWER(加强型)的技术规范 7 2.4 DUALAC2&HP POWER(加强型)的技术规范 8 2.5 控制单元 82.5.1微动开关82.5.2 加速单元 82.5.3 其他模拟控制单元 92.5.4 速度反馈 92.5.5 转向角传感器 10 2.6 保护特性 11 2.7 操作特性 12 2.8 故障诊断 13 2.9 热保护措施 13 2.10 常规问题的解决与防范 13 2.11 磁化与磁辐射 132.12 主接触器与应急开关 143 安全与保护144、安装14 4.1 连接电缆 14 4.2 接触器 15 4.3 熔断器 15 4.4 “DUALAC2”与“DUALAC2”加强型的接线说明 15 4.5 “DUALAC2”与“DUALAC2&HP”加强型的接线说明 17 4.6编码器安装 19 4.7CANBUS连接器的结构 194.7.1单个DUALAC2 控制器 194.7.2“DUALAC2”作为CANBUS网络的终端模块 204.7.3“DUALAC2”作为循环模块接入CANBUS网络 20 4.8电源接线图 214.8.1“DUALAC2” 214.8.2“DUALAC2加强型” 224.8.3“DUAL AC2&HP” 234.8.4“DUALAC2&HP加强型” 24 4.9机械图 25 4.10“DUALAC2”与“DUALAC2加强型”标准接线图 294.11 “DUALAC2&HP”与“DUALAC2&HP加强型”标准接线图 305、利用手持单元的编程及调整 315.1使用手持单元调整 31 5.2手持单元及连接器接线的描述 315.3标准手持单元菜单的介绍 32 5.3.1 “DUALAC2”与“DUALAC2加强型”菜单结构 325.3.1a 主菜单 325.3.1b 从菜单 335.3.2 “DUALAC2&HP”与“DUALAC2&HP加强型”菜单设置 345.3.2a 主菜单 345.3.2b 从菜单 35 5.4 功能设置 35 5.4.1 “DUALAC2”与“DUALAC2加强型”—主控制部分 35 5.4.2 “DUALAC2”与“DUALAC2加强型”—从控制部分 375.4.3 “DUALAC2&HP”与“DUALAC2&HP加强型”—主控制部分功能 38 5.4.4 “DUALAC2&HP”与“DUALAC2&HP加强型”—从控制部分功能 38 5.5 参数调节 40 5.5.1 “DUALAC2”—主控制部分 40 5.5.2 “DUALAC2”—从控制部分 41 5.5.3 “DUALAC2&HP”—主控制部分 415.5.4 “DUALAC2&HP”—从控制部分 42 5.6 可编程的控制器的功能 46 5.6.1 功能设置(参见 5.4) 465.6.2 参数编程(参见5.5) 465.6.3“DUALAC2&HP”与“DUALAC2&HP加强型”测试 465.6.4“DUALAC2&HP”与“DUALAC2&HP加强型”测试 475.6.5 储存功能(存储数据)—仅适用于PC 控制 47 5.6.6 复制功能(下载参数用于其他控制)—仅适用于PC手持单元 47 5.6.7 显示最后5次报警信息,连同小时计值,温度一起显示 47 5.6.8 加速器范围整定 48 5.6.9 参见手持单元手册对于功能和参数的详细说明 48 5.7 AC牵引逆变器设置顺序 48 5.8 测试功能描述 48 5.8.1 “DUALAC2”与“DUALAC2加强型”—主控制部分 495.8.2 “DUALAC2”与“DUALAC2加强型”—从控制部分 50 5.8.3 “DUALAC2&HP”与“DUALAC2&HP加强型”—主控制部分 515.8.4 “DUALAC2&HP”与“DUALAC2&HP加强型”—从控制部分 526、其他功能54 6.1 保存与复制功能 54 6.2 报警菜单描述 54 6.3 手持单元整定加速器操作过程 557、“DUALAC2”与“DUALAC2&HP”故障诊断56 7.1 与牵引相关的错误编码 56 7.2 手持单元显示的关于牵引相关的报警分析 60 7.3 与泵斩波器相关的故障编码 647.4 手持单元显示的关于油泵方面的报警分析 658、推荐使用部件659、定期维护 67= 凡标注此记号的章节是与安全相关的内容签名表公司DEPT.设备执行经理工程执行部分出货管理员出版物编号:版本1 简介ZAPIMOS系列中的DUAL AC2逆变器适合用于3—7KW一对电机控制。
APM自动调参步骤

APM自动调参步骤APM飞控自动调参操作步骤:1). 设置一个定高档位(althold)。
在mission planner, Config/tuning里面APM : copter PIDS 选项卡中将ch7或者ch8 设置为自动调参(autotune)。
2). 将apm所设置的input通道,连接到遥控器的一个2档开关。
将遥控器对应的2档开关打到关档(low)。
3). 一定要找一个无风的天气或者风很小的天气出去自动调参,到一个尽可能大的空旷场地。
如果有条件可以在体育馆里。
4). 自稳模式解锁起飞,将飞行模式切换到定高。
尽量不要飞太高,高处空气流动速度会快,如果万一摔机,低空可以减小损失,尽量在草地上测试自动调参(后面会讲怎样防止自动调参坠机)。
5). 将设置的ch7 或者ch8 对应遥控器2当开关打到开档(high)以启动自动调参:首先飞机会先向左倾斜20度,再向右20度,左右来回几分钟。
横滚调好之后会开始做俯仰调参,前后晃。
6). 可以随时用遥控器控制飞机前后左右上下位置以免碰撞到障碍物,在手动调节飞机位置的时候使用的是原始的PID值,松开杆后飞机会继续从刚才移动前的那个点继续调。
也可以随时将自动调参开关置低来放弃调参过程。
遥控器的4个摇杆方向微调全要置0,这样才可以模拟摇杆回中。
7). 自动调参结束飞机会自动恢复调参之前的PID。
8). 此时将调参开关打低、再打高飞机就以调参之后的PID飞行,如果觉得满意直接让调参开关在高档位,降落加锁,这样就保存了新的PID。
9). 或者将调参开关打低,降落加锁,这样就不保存数据。
注意:以下第一条是自动调参炸鸡官方解释的主要原因,autotune的bug 在去年12月就已经修干净了,现在就是电调不同步导致炸鸡了。
1. 自动调参会对生成频率很高的PWM脉冲方波给电调(让飞机迅速左右前后摇晃以感应参数),在PWM脉冲变化速度快的情况下,盘式电机或者低于500KV的电机就会容易堵转。
ZAPI手持单元使用说明_V0_1

文件名称ZAPI手持单元使用说明版本2010.V1备注JS/ 签发人:巩炜2010年9月24日发布实施ZAPI手持单元使用说明1.按键说明l按键1:上翻l按键2:下翻l按键3:确认(进入/保存)l按键4:退出l按键5:增加l按键6:减小2.基本功能菜单A.PARAMETERS 参数菜单B.TEST测试菜单C.SAVE保存菜单D.RESTORE参数导入菜单E.ALARM故障菜单F.PROGRAM VACC加速器整定菜单G.MOTOR DATA电机参数菜单3.配置菜单同时按1&5键进入A.SET MODEL模式菜单B.SET OPTIONS功能选择菜单C.ADJUSTMENTS调整菜单4.专业秘密菜单进入ALARM菜单,再同时按5&6键进入A.SPECIFICAL ADJUSTMENT特殊调整菜单B.HARDWARE SETTING硬件设置菜单5.常见参数及所在菜单示意菜单名称参数名称设置值参数含义调整说明PARAMETERSACCELER. DELAY LEVEL = 5 加速延时根据系统需要设置RELEASE BRAKING LEVEL = 6 释放制动根据系统需要设置INVERS. BRAKING LEVEL = 8 反向制动根据系统需要设置PEDAL BRAKING LEVEL = 9 踏板制动根据系统需要设置SPEED LIMIT BRK. LEVEL = 1 极限速度制动根据系统需要设置BRAKE CUTBACK LEVEL = 5 制动加速根据系统需要设置MAX SPEED FORW 95 Hz 前进最大速度根据系统需要设置MAX SPEED BACK 95 Hz 后退最大速度根据系统需要设置CUTBACK SPEED 1 60% 速度削减根据系统需要设置CURVE CUTBACK 20% 弯道减速根据系统需要设置FREQUENCY CREEP 1.20 Hz 爬行频率根据系统需要设置MAXIMUM CURRENT LEVEL = 8 最大电流根据系统需要设置BACKING SPEED 10 Hz 点动速度根据系统需要设置BACKING TIME LEVEL = 5 点动时间根据系统需要设置ACC. SMOOTH 1.2 加速平滑根据系统需要设置INV. SMOOTH 0.4 反向平滑根据系统需要设置STOP SMOOTH 10 Hz 制动平滑根据系统需要设置AUXILIARY TIME 1.5 辅助时间根据系统需要设置SET OPTIONSHOUR COUNTER KEYON 计时功能根据系统需要设置BATTERY CHECK ON 电量检测根据系统需要设置TRACTION CUTOUT OFF 行走锁止根据系统需要设置HYDRO KEY ON OFF 开钥匙转向根据系统需要设置STOP ON RAMP OFF 坡上停车根据系统需要设置AUX INPUT #1 OPTION #2 辅助输入#1 根据系统需要设置PEDAL BRAKING DIGITAL 踏板制动类型根据系统需要设置SET TEMPERATURE ANALOG 电机温度传感器类型根据系统需要设置STEER TABLE OPTION #1 转向类型根据系统需要设置CNC#8 INPUT USE NONE C8功能根据系统需要设置DISPLAY TYPE LEVEL = 0 仪表类型根据系统需要设置PEDAL BRK.ENABLE OFF 踏板制动使能根据系统需要设置SET MODEL CONNECTED TO TRACTIONRIGHT节点类型ADJUSTMENTSET POT BRK MIN 1.0 V 制动电位器最小值根据系统需要设置SET POT BRK MAX 9.0 V 制动电位器最大值根据系统需要设置SET BATTERY TYPE 48V电瓶电压(系统电压标称值)根据系统需要设置ADJUST BATTERY 48.67 V 电瓶实际电压一般不用调整MAX STEER RIGHT 3.1 V方向转到最右侧转角电位器值根据系统需要设置MAX STEER LEFT 0.4 V方向转到最左侧转角电位器值根据系统需要设置SET STEER 0-POS. 1.7 V 方向转正(0度)转角电位器值根据系统需要设置SET STEER RIGHT 90 ? 右方向最大角度根据系统需要设置SET STEER LEFT 90 ? 左方向最大角度根据系统需要设置THROTTLE 0 ZONE 9%加速特性设置根据系统需要设置THROTTLE X POINT 45% 根据系统需要设置THROTTLE Y POINT 57% 根据系统需要设置ADJUSTMENT#2 BDI LEVEL = 3 系统电量检测下限根据系统需要设置ADJUSTMENT#1 BDI LEVEL = 5 系统电量检测上限根据系统需要设置MAIN CONT. VOLT. 48 V 主接触器电压根据系统需要设置AUX OUTPUT VOLT. 48 V 辅助输出电压根据系统需要设置LOAD HM FROM MDI OFF 从MDI导入时间功能根据系统需要设置CHECK UP DONE OFF 根据系统需要设置CHECK UP TYPE NONE 根据系统需要设置SPECIFICAL ADJUSTMENTADJUSTMENT #01 113%控制器固有参数不需要调整ADJUSTMENT #02 109% 不需要调整SET CURRENT 450 A 控制器最大电流根据控制器标称调整SET TEMPERATURE 28 癈控制器温度一般不用调整SET TEMP MOT R. 279 癈右电机温度一般不用调整SET TEMP MOT L. 279 癈左电机温度一般不用调整AUX OUTPUT #1 LEVEL = 15 一般不用调整AUX OUTPUT #2 LEVEL = 15 一般不用调整HARDWARE SETTINGCOMPENSATION ON ONSLIP CONTROL ON 滑差控制ONDC-LINK COMPENS. ON ON SLAVE HELP INT. 80% 不需要调整SLAVE FREE LEVEL 200% 不需要调整SAT FREQUENCY 60 Hz 饱和频率根据系统需要设置BRAKING MODUL. 60 Hz 根据系统需要设置MINIMUM VOLTAGE 5% 根据系统需要设置BOOST AT LO FREQ 21% 根据系统需要设置BOOST AT HI FREQ 21% 根据系统需要设置BOOST CORNER FRE 30 Hz 拐点频率根据系统需要设置BRAKING BOOSTER 0% 根据系统需要设置MOTOR RESISTANCE LEVEL = 0 根据系统需要设置SLIP COEFFICIENT LEVEL = 0 根据系统需要设置MAXSLIP RESET 0.60 Hz 根据系统需要设置MAXSLIP LOW FREQ 2.50 Hz 根据系统需要设置MAXSLIP INC. 0.50 Hz 根据系统需要设置MAXSLIP FREQ. 20 Hz 根据系统需要设置MAXSLIP FREQ INC 40 Hz 根据系统需要设置OPTION 07 LEVEL = 1 不需要调整OPTION 08 LEVEL = 1 不需要调整OPTION 06 LEVEL = 6 不需要调整AUX VOLTAGE #3 LEVEL = 9 不需要调整主题词:手持单元使用说明作者:巩炜校对:打印:二○一○年九月二十三日共印份。
萨姆森调节阀定位器的安装及校准

萨姆森调节阀定位器的安装及校准一、Samson 3730-2型定位器特点1、易于装配到带SAMSON直接集成安装连接口,NAMUR凸缘的直行程或角行程气动执行机构,以及控制阀带符合IEC 60534-6-1标准的杆型支架上,或者符合VDI/VDE 3845标准的角行程气动执行机构2、任意的安装位置3、简单的单旋钮按键,菜单调用操作4、方便读数,可根据读数方向需要选择改变LCD显示方向5、使用TROVIS-VIEW软件经SSP串行接口由PC机进行组态6、可变的自动启动具有4种不同的初始化模式7、在紧急情况,同时生产现场不允许控制阀进行全行程动作时,使用“Sub”初始化模式(替换法)对阀门定位器进行替换后的启动8、输出信号压力限值可调9、可激活紧急关闭功能10、标配2个可组态的阀位报警二、技术参数(数据表)三、组成3730-2/3型数字式电气阀门定位器主要由带微处理器的电子单元、模拟的电气转换器和输出气动放大器以及阀位传感器(角位移传感器)组成。
1、Samson 3730-2型定位器功能原理图2、外形尺寸图3、原理1、阀门定位器接受控制系统或控制器输出的电动控制信号,按预先设置关系辅助气动执行机构调整阀位并实现准确定位。
2、阀门定位器将输入控制信号(给定参数w)和控制阀位行程或旋转角(被调参数x)反馈量进行比较、处理,进而输出相应的气动控制信号pst(输出参数y)给气动执行机构3、当输入控制信号变化或有阀位偏差,则对气动执行机构加压或泄压若需要,可调整输出气量改善信号压力作用,4、还可由软件设置输出信号压力限制值1.4、2.4或3.7巴。
带有固定设定值的气量定值器(9)可保持一恒定气量排空,用于阀门定位器壳内正压吹扫和优化气动放大器输出容量。
5、由气源压力定值器(8)向电气转换器(6)的提供恒定压力的气源,且不受外部气源压力变化影响。
4、气动连接5、安装与连接6、电缆连接确定行程反馈杆和连接销钉位置必须满足行程及要求7、显示与定位器内部功能图四、萨姆森定位器校正1、定位器面板2、操作1、阀门定位器由用户容易掌握使用的单旋钮按键进行操作,通过转动旋钮按键选择参数,按下旋钮按键激活需要的设定。
意大利Zapei驱动器ACE2行走电机驱动器说明书(48V350A)
萨牌仪表说明书

萨牌仪表说明书1 特性1.1 特点1( 萨牌MDI多功能数字仪表是一个显示器,它适用于所有装有ZAPI高频电控器的各种形式的电动车辆。
2( 萨牌MDI多功能数字仪表的信号取自斩波器,而不是电瓶,这样不同电压等级的车辆也可用同一仪表。
3( 电瓶的放电状态由微处理器进行一定的换算模拟获得。
该换算考虑了制动及起动等大电流工况对电瓶的影响。
4( 用萨牌MDI数字式手持单元,可以选择100种不同放电曲线。
5( 萨牌MDI 多功能数字仪表是一个以微处理器为基础的系统。
对电瓶放电状态测量是高精度的,具有很高的可靠性和灵敏度。
同时萨牌MDI多功能数字仪表还可以显示工作小时。
6( 萨牌MDI多功能数字仪表有三个内部功能。
, 显示放电状态。
, 工作小时。
, 显示控制系统故障。
7( 萨牌MDI多功能数字仪表不直接连到电瓶,她仅与斩波器相连。
与传统显示仪表相比,萨牌MDI多功能数字仪表无需复杂接线,也节省了安装时间。
1.2 显示功能说明1.2.a 发光二极管显示功能萨牌MDI多功能数字仪表用发光二极管显示电瓶放电状态。
萨牌MDI多功能数字仪表有五个发光二极管,一红四绿,表示电瓶的放电状态。
充足电时,四个绿色发光二极管全亮。
随着电瓶不断放电,四个绿灯随电瓶剩余电量的减少逐步并按一定顺序熄灭,直至电瓶放完电,红灯开始闪烁,表示电瓶已开始过放电,斩波器进入低电压保护状态。
1.2.b 液晶显示功能小时计:在萨牌MDI多功能数字仪表中部装有液晶显示器,它可以用来显示 1( 工作小时2( 系统故障,萨牌MDI多功能数字仪表显示故障状态时是以相应的代码表示,故障发生时,红色发光二极管将开始闪烁,以引起注意。
3( 软件版本:电锁刚闭合时,萨牌MDI多功能数字仪表显示EPROM中的软件版本,即EP××,同时出现扳手图案。
4( 其它信息,萨牌MDI多功能数字仪表上有三种图案,分别告知司机下列信息:乌龟图案:表示车辆处在“软”方式工作状态,在这种状态下,最大速度和加速度都被减小了。
SOPA简易调试手册

SOPA简易调试手册机械安装气接口连接电接口连接控制模块电路图控制模块的针脚定义Pin1 工作电压+24V 棕色Pin2 切换输入B(清洁功能)白色Pin3 工作电压0V 蓝色Pin4 切换输入A(检测功能)黑色PIN5 不用接测量模块电路图感测针脚定义Pin1 工作电压+24V 棕色Pin2 切换输出B,窗口比较白色Pin3 工作电压0V 蓝色Pin4 切换输出A,阈值比较黑色Pin5 不用接显示图标意义运行模式:切换输出设置显示模式和编辑模式:切换输出选择阈值比较窗口比较切换点切换点最小值切换点最大值迟滞常开方式常闭方式极限值:最小示教模式激活切换功能排气抑制选项(手册密码锁功能打开特殊菜单操作模式:条形图标表示当前距离测量值与切换点的对应关系。
在其它模式下意义不同。
条形图标距离到达以下情况时亮起距离距离距离距离距离距离距离距离一直亮着阈值比较窗口比较快速调试打开供电电源,传感器模块自动切换到RUN(运行)模式(基本设置)。
如果传感器模块不是RUN(运行)模式,可按下EDIT按钮3秒钟,此时传感器模块在RUN(运行)模式工作。
输出A用于距离测量。
采用快速调试方式,你必须手动设置或示教输出A的切换点。
第一种方式:手动设置切换点A1 按EDIT键,进入EDIT(编辑)模式。
此时界面上[OUTA]闪烁。
2 再次按EDIT键。
界面上[SP]闪烁(SP=切换点)3 使用UP/DOWN按键,设定目标切换点(相应的距离值)4 按下EDIT按钮3秒钟,此时传感器模块在RUN(运行)模式工作第二种方式:示教输出A的切换点1 将目标物体放置在与测量喷嘴相应距离的位置上(此距离为目标距离)2 将此时的目标距离作为输出A示教点:首先,按A键,然后按EDIT键。
此时界面上的[A]和[Teach]闪烁。
松开按键后一小段时间内闪烁停止。
示教点已作为新的切换点输入。
传感器模块再次进入RUN模式。
调试方法详细如下:EDIT(编辑)模式设定切换输出的切换点建议:使用了控制模块:保持OUT B的出厂设置。
压限器的具体调整方法
压限器的具体调整方法A、噪声门的调整方法阈值(THRESHOLD):调整时把调音台总音量拉下,系统中不要有一点人为的音频信号,转动此调节旋钮,看到噪声门指示红灯亮后再开大一点即可,但不能调太大,否则把有用音乐也给压住了。
就像上面说的水闸那样,要适当比标准提高点,就算拦截了一些清水也可以。
2、恢复时间(RELEASE):噪声门的恢复时间和压缩器里的恢复时间稍有不同,可以适当长一些,综合来说应在500 ms左右较合适。
B、压缩器和限幅器的调整方法不同的压限器有不同的调整旋钮和参数,但下面4点是大多数压限器最基本的标准功能旋钮了:1、阈值(THRESHOLD)的调整阈值的调节要结合压缩比率来调节,最简单的方法就是关掉功放,把压限器前的周边设备调到正常工作状态,然后把调音台的音量开到正常演出时的最大音量的位置,基本上此时调音台上的电平信号指示灯也会亮红灯了,这时调整压限器的阈值(THRESHOLD)旋钮,调整到压限器中压缩指示红灯开始闪亮时,表示此时压限器已经开始工作了,这时阈值(THRESHOLD)就基本调好了。
需要注意的是压缩比一定要开,要大于1:1,否则压限器等于直通,是不起任何压限作用的。
2、压缩比(RATIO)的设定压缩比的设定要有一定范围,过小起不到压限作用,过大,就会造成音乐动态范围变窄、声音干瘪无味。
在一般的演出中可以将压缩比设定在3:1左右;在的士高等大动态音频信号的系统中,一般将压缩比设定在5:1左右;作为限幅器使用时,应将压缩比设定在∞:1(无限大)。
3、启动时间(ATTACK)的调整!刚才我们已经谈到启动时间快速一点会好些,否则会影响音乐的特性。
综合来说,启动时间应在50ms-80 ms之间较合适。
4、恢复时间(RELEASE)的调整0恢复时间恰恰相反,需要慢一点,综合来说,恢复时间应在400ms-600 ms之间较合适。
说了这么多可能有些音响师还会觉得没有头绪,还是犯迷糊,那我们就说点实际的、简单的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ACE2 重要参数翻译8.7 交流控制器作为牵引的设置顺序当钥匙开关打开,如果没有报警或者错误提示,编程器会显示标准的ZAPI开机画面显示。
那控制器没有满足你的配置要求而配置,可以根据9.2章节的细节,,当改变任何控制器的配置以后,记得要反复开关钥匙开关(上电生效)。
可以根据下面的细节内容进行配置。
1、选择需要修改的选项,看8.4.1章节2、选择并设置电池电压,看8.4.1章节。
3、用手持编程器的TESTER 功能,来测试导线保证所有电线连接正确。
4、用手持编程器的加速器信号修正功能(PROGRAM V ACC)。
来采集加速器信号。
操作步骤细节在9.4章节。
5、设置MAXIMUM CURRENT 最大电流值,使用表格在8.5.1章节6、根据车辆设置加速延时,并从两个方向对次参数进行测试。
ACCELER DELAY 加速延迟、DECELER SELAY 减速延迟7、设置FREQUENCY CREEP,从0.3HZ开始设置,加速器微动开关开始闭合,车辆应能刚好启动,据此相应的增加爬行频率的大小HZ。
8、设置速度降低(SPEED REDUCTIONS)。
调整CUTBACK SPEED ,通过加速器踏板完全踩到底,检查性能。
如果是叉车,核对负载和无负载情况下检查加速器的性能。
9、释放制动(RELEASE BRAKING),将车辆开到全速,释放加速器踏板,调整参数到满足制动要求,如果设备是叉车,核对负载和无负载情况下的性能表现。
10、反接制动(INVERSION BRAKING),将车辆设备开到全速的25%,同时接反向开关,设置制动软水平,检查这时制动强度是否符合要求,若符合将车辆开到全速再调。
无负载全速的条件下的测试,应该是非常具有代表性的。
11、踏板制动(DECELERATION BRAKING ),操作设备到全速,再释放加速器到50%,幅度达到,调整参数到你的要求,12、PEDAL BRAKING ,,操作设备到全速,释放加速器,踩下制动踏板,根据性能需求设置刹车参数,13、SPEED LIMIT BRAKING,操作设备到全速,关闭减速开关。
调整该参数。
14、设置MAX SPEED FORW (正向)15、设置MAX SPEED BACK(反向)16、斜坡停车功能,看8.4章节,如果STOP ON RAMP 是ON,设置AUXILIARY TIME 到希望的值。
17、设置SET TEMPERA TURE 设置电机温度传感器的使用的类型。
8.4.1 牵引一、子菜单“SET OPTIONS”1、TILLER SWITCH输入点:A6,2个参数可以选择—HANDLE 作为受柄开关输入(释放没有延时)—SEAT 作为座椅开关输入(有延时,消除抖动功能)2、HOUR COUNTER—RUNNING 小时计只记录行走时间—KEY ON 当电锁开关闭,开始计时3、CUTBACK MODE输入点:A13,2个参数可以选择—PRESENT 作为速度降低输入—ABSENT 手刹输入4、BATTERY CHECK—ON 有电瓶电量检测,当电瓶电量底于10%时,最大电流设为设定值的一半,且报警提示。
—OFF 启动电瓶电量检测,但不报警5、STOP ON RAMP 斜披停车—ON 设置斜坡停车功能,在坡上电制动停车,维持时间取决于AUXILIARY TIME 中的设定值。
其后的行为由AUX OUTPUT#1功能项的设置规定。
—OFF 不执行斜坡停车功能6、AUX OUTPUT #1 辅助输出1—BRAKE A18输出驱动一电制动线圈。
—HYDRO CONT 当方向输入或者制动踏板输入或者车辆运动的信号被检测到时,控制器就会执行液压转向功能。
—EX.HYDRO 当转向专用油路输入有效时,控制器执行液压转向功能。
7、SET TEMPERA TURE—DIGITAL 数字电机温度传感器连接在A22和A23之间。
—ANALOG 模拟电机温度传感器连接在A22和A23之间。
—NONE 无温度传感器开关连接二、子菜单“ADJUSTMENTS”1、EST POT BRK MIN 当制动踏板开关闭合时,记录制动踏板电位器的最小值,只有当踏板制动功能(PEDAL BRAKING )设为模拟“ANALOG”时才能执行此功能。
2、EST POT BRK MAX 当制动踏板开关闭合时,记录制动踏板电位器的最大值,只有当踏板制动功能(PEDAL BRAKING )设为模拟“ANALOG”时才能执行此功能。
3、SET BATTERY TYPE 选择电瓶额定电压4、ADJUST BATTERY 精确调节由控制器测得的电瓶电压值5、THROTTLIE 0 ZONE 在加速器输入曲线设置一个死区6、THROTTLIE X POINT 这个参数可改变加速器输入曲线的特性7、THROTTLIE Y POINT这个参数可改变加速器输入曲线的特性V ACC MINT 和V ACC MAX的值可使用加速器信号修正功能PROGRAM V ACC进行设置。
8、BATT.MIN.ADJ9、BATT.MAX.ADJ10、ADJUSTMENT #0311、LOAD HM FROM MDI12、CHECK UP DONE13、CHECK UP TYPE14、MAIN CONT VOLT15、AUX OUT VOLT16、MAIN CONT.V RID17、AUX OUTPUT V RID8.5.1牵引可修改的参数1、ACCELERATION 02、INV.ACCEL 03、ACCELERATION 14、ACCELERATION 25、ACCELERATION 36、ACC PROF.FREQ 17、ACC PROF.FREQ 28、ACC PROF.FREQ 39、RELEASE BRAKING 释放制动10、INVERSION BRAKING 反转制动11、INVERSION BRAKING12、DECELERATION BRAKING 减速制动13、PEDAL BRAKING 踏板制动14、SPEED LIMIT BRAKING 制动限速15、MAX SPEED FORW 前进方向最大速度16、MAX SPEED BACK 后退方向最大速度17、CUTBACK SPEED 1 速度降低(当减速开关作用时的速度削减)18、FREQUENCY CREEP 爬行频率。
当前进或者后退开关闭合时的最小速度。
这个时候加速器在最小位置19、MAXIMUM CURRENT 最大电流20、BRK SMOOTH21、STOP BRK SMOOTH22、AUXILIARY TIME 辅助时间。
斜坡电制动参数为ON,车辆在斜坡电停车的保持时间。
8.9.1测试功能1、BATTERY VOLTAGE 电池电压2、MOTOR VOLTAGE 电机电压3、VOLTAGE BOOSTER 电压增加(有负载时电机的电压增加,以满足电压百分比表示)4、FREQUENCY 频率5、ENCODER 编码器6、SLIP V ALUE 转速差7、CURRENT RMS 电流平方根8、MOTOR POWER 电机功率9、BATTERY CHARGE 电池充电电量,百分比表示10、TEMPERATURE 温度11、MOTOR TEMPERAT 电机温度12、ACCELERATOR 加速器电压13、HANDLE/SEAT SWITCH 手柄/座椅开关14、FORWORD SWITCH 前进开关15、BACKWORD SWITCH 后退开关16、CUTBACK SWITCH 速度削减开关(300MM限速开关)17、HAND BRAKE 手制动开关18、BRAKEPEDAL POT 施加给制动踏板的压力比例19、2ND HOURMETERS 第二个小时计9.4 加速器信号范围修正菜单PROGRAM V ACC FUNCTION该功能追踪并记忆踏板全冲程内电位器滑动端的最大电压和最小电压.这允许对两个方向上机械系统的不对称性进行补偿.补偿过程可通过进入PROGRAM V ACC功能后操作踏板完成.下图显示如何使用手持单元的加速器编程功能:1)打开手持单元2)按ENTER进入主菜单3)显示主菜单第一项:PARAMETER CHANGE (参数修改)4)按ROLL UP或ROLL DOWN直到出现:PROGRAM VACC5)显示PROGRAM V ACC6)按ENTER进入PROGRAM V ACC菜单7)屏幕显示前进/后退两个方向加速器滑动端输出电压的最大值和最小值。
8)按ENTER清除,屏幕显示:0.09、选择前进方向。
10、慢慢踩下踏板(或手柄)到它的最大位置。
屏幕将显示新的最小和最大电压值,并用箭头标出方向11、选择后退方向,重复步骤1012、完成后按OUT13、显示确认要求:ARE YOU SURE?14、按ENTER保存设置退出,按OUT放弃设定值15、按OUT返回主菜单。