基于LabVIEW的机器人视觉伺服及模煳控制研究
基于LabVIEW的直流伺服电机模糊PID控制系统
基于LabVlEW的直流伺服电机模糊PID控制系统LabVIEW-BasedFuzzyPIDControlSystemofDCServo-motor昊占涛-,z张桂香2(1湖南大学国家高效磨黼I程技术研究中心,长沙410082;2湖南大学机械与汽车工程学院,长沙410082)攘娶:论述了一种基予模糍PID算法的直流镯服电极控制系统,介缁了模糨PID算法及模糊控裁规鲻。
系统采用图形化的编程潜言LabVIEW,软件交互界面友好。
试验结果表明,采用该模糊PID控制器的系统能克服常规PID控制器的弊端,控制品质好,算法简单,具有实际应用价值。
关键词:直流伺服电视模糊控铡PIDLabVIEWAbstract:TheDCservo-motorcontrolsystembasedonfuzzyPIDalgorithmisintroduced。
ThefussyPIDalgorithmandtheregulationoffuzzycontrolarepresented.Thesystemhasafinesoftwareinterface,whichisrealizedbyLabVlEW。
TheresultsshowthatthefussyPIDcontrolsystemcanovercomethedrawbacksoftraditionalPIDcontroller,whichhasapracticalvalueofapplicationwithgoodcontrolperformanceandsimplealgorithm.Keywords:DCservo-motorfuzzycontrolPIDLabVIEW0引言直流伺服电视爨祷响应侠、低速平稳住好、潺速范围宽等特点,常用于实现精密谪速和位置控制的随动系统中,在工业、国防和民耀等领域内褥到广泛应瘸脚;所以,会理选择鸯漉饲服电机的控制方法。
X寸予充分发撂盔流箍鞭电梳的工作蔑麓鸯着积极的作用。
LabVIEW与机器人视觉实现智能机器人的感知与控制

LabVIEW与机器人视觉实现智能机器人的感知与控制实现智能机器人的感知与控制是当前科学技术领域研究的热点之一。
在这一领域中,LabVIEW与机器人视觉技术被广泛应用,为智能机器人的感知与控制提供了强大的支持。
本文将就LabVIEW与机器人视觉实现智能机器人的感知与控制进行详细介绍。
一、LabVIEW与机器人视觉技术的基本原理LabVIEW,全称是Laboratory Virtual Instrument Engineering Workbench(实验室虚拟仪器工程化平台),是一种高度可扩展的系统设计软件,可以用于测量与控制、自动化测试和监视等领域。
而机器人视觉技术,是指利用机器视觉对机器人进行环境感知、目标识别和位置定位等操作的技术。
LabVIEW与机器人视觉技术的结合,可以实现智能机器人的感知与控制。
LabVIEW作为一个强大的开发平台,提供了丰富的功能库和开发工具,可以方便地进行图像处理和控制算法的开发与调试。
而机器人视觉技术则借助图像采集装置(如摄像头)获取周围环境的图像信息,并通过图像处理算法实现对图像的解析和分析,从而实现对环境和目标的感知。
LabVIEW通过其可视化的编程环境与机器人视觉技术的结合,不仅使得开发过程更加简便高效,还提高了机器人感知与控制的准确性和稳定性。
二、LabVIEW与机器人视觉实现智能机器人的感知智能机器人的感知主要包括环境感知和目标感知两个方面。
环境感知是指机器人对周围环境的感知和识别,目标感知是指机器人对周围目标的感知和识别。
LabVIEW与机器人视觉技术的结合,可以实现智能机器人的感知功能。
1. 环境感知环境感知是指机器人对周围环境的感知和识别。
通过使用LabVIEW搭建的图像处理算法,机器人视觉系统可以对环境中的物体进行分析和识别,并将感知到的环境信息传递给控制系统。
例如,机器人可以通过摄像头获取环境中的图像信息,然后使用LabVIEW进行图像处理,识别出环境中的墙壁、障碍物等,并基于这些信息来规划自己的移动路径。
基于LabVIEW的模糊控制系统设计
个预先设计好 的后缀为 . f s的模糊控制系统文件到 系统 中。
p o u t n id vd al . B tt e a p ia in o h s w o i e s r lt ey l s . B ne r t g t e me to oh L b EW r d c i n ii u l o y u p l t ft e e t o c mb n d wa ea i l e s h c o v y i tg ai h r f t a VI n i b
K e o ds: b EW ;uzy c nto he r vru lisr m e t yw r La VI f z o r lt o y; it a n tu n
1 L b E 实 现 模 糊 控 制 的 方 法 a VI W 1 1 在 L b I W 中 实 现 模 糊 控 制 有 多种 方 法 : . a VE ( ) 用 Lb I W 中 的 CN 节 点 可 以 编 辑 或 者 调 用 已 经 1利 a VE I
Z A G Y n — e gG O H n — ,I ig i H N ogs n , A o g iLU Qn -e h l j ( co l f c a ia E g er g S uh et ioo gUnvri , h n d 1 0 1 C ia Sh o o h ncl n i ei ,o tw s Jatn ies y C e g u60 3 , hn ) me n n t
摘要: 图形 编 程 语 言 L b I W 和 模 糊 控 制 系统 凭 借 其 各 自的 特 点 在 工业 生产 中得 到 广 泛 的 应 用 , 是 将 两 者 结 合 的 a VE 但
应 用比较 少。结合 L b IW 和模 糊控制 系统的优点 , aVE 分析 了 L b IW 中 实现模 糊控制 系统 的方法 , aV E 利用 PD adF zy I n uz
LabVIEW中的机器人视觉和运动控制
LabVIEW中的机器人视觉和运动控制LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一个用于快速设计、构建和部署控制系统的图形化开发环境。
其中,机器人视觉和运动控制是LabVIEW的重要应用领域之一。
本文将介绍LabVIEW中机器人视觉和运动控制的基本原理和应用案例。
一、机器人视觉机器人视觉是利用摄像头、激光雷达等传感器获取环境信息,通过图像处理和模式识别算法实现对目标的识别、定位和跟踪。
在LabVIEW中,可以通过著名的Vision模块实现机器人视觉的开发。
Vision模块提供了一系列丰富的函数和工具,用于图像采集、预处理、特征提取、目标检测等。
通过可视化的编程方式,用户可以方便地构建图像处理流程,并与机器人或其他设备进行实时通信。
例如,在一个工业自动化系统中,需要将机器人定位到指定的物体上进行抓取。
首先,通过摄像头采集实时图像,然后使用Vision模块提供的函数进行图像滤波、边缘检测等预处理操作。
接下来,通过目标检测和跟踪算法,实现对物体的识别和跟踪。
最后,将机器人的运动指令发送给控制系统,实现机器人的精确定位和抓取动作。
二、机器人运动控制机器人运动控制是实现机器人运动路径规划和轨迹跟踪的关键技术。
在LabVIEW中,可以通过Motion模块实现机器人的运动控制。
Motion模块提供了丰富的功能和工具,用于运动控制系统的建模、控制算法的设计、运动轨迹规划等。
借助LabVIEW的图形化编程界面,用户可以直观地设计运动控制系统,并对实时数据进行监测和分析。
以一个机械臂控制为例,实现机器人在三维空间的运动控制。
首先,用户需要使用Motion模块提供的建模工具,创建机器人的运动学和动力学模型。
然后,通过路径规划算法,确定机器人的运动轨迹。
接下来,使用PID控制算法,对机器人的位置和姿态进行控制。
最后,通过与机器人的通信接口,将控制指令发送给机器人控制器,实现机器人的运动。
基于模糊控制的机器人视觉伺服系统
2 0 Si eh E gg 0 6 c.T c . nn .
计算机 技术
基于模糊 控制的机 器人视觉 伺服 系统
孙 洪淋 孙 ' 炜h 石玉秋 廖 继 旺
( 湖南大学 电气与信息工程学院 长沙 408 ; , 102 湖南信息职业技 术学院 沙 400 ) 长 120
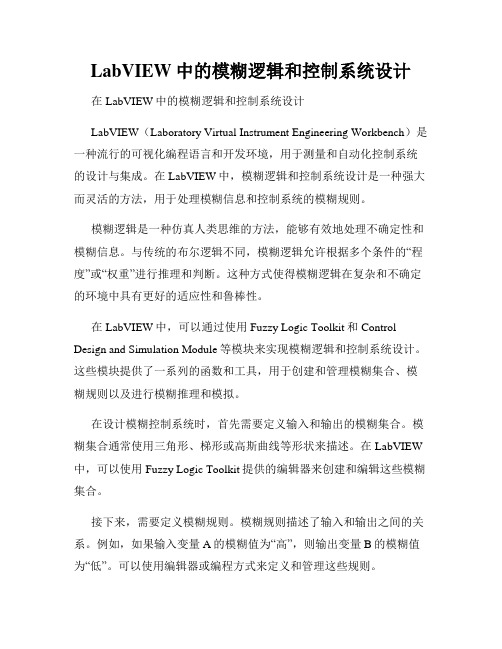
模糊视觉控 制器 以圆球 在成像平 面上 的 图像 特征( Y r作为机 器人视觉伺服系统的输入语言 ,,) 变量 , 以机 械 手各 关 节 的位 置 期 望 变化 率 ( 0 、 A
△ : ) 、 作为输 出信号 , △ 与之对应的输 出语言变量
为 J J。 hJ 3
图 2 机器人视觉伺服模 糊控制系统结构
关键词
模糊控制
机器人
视觉伺服 系统
中图法分类号 1 26 12 . ; P4
文献标识码 A
机器人视觉伺服控 制系统是 一个 多输人 多输 出的非线性 系统 , 它具 有时变性 、 强耦 合和非线 性
的动力学 特 征 , 难 用 精 确 的 数 学模 型来 描 述 。用 很
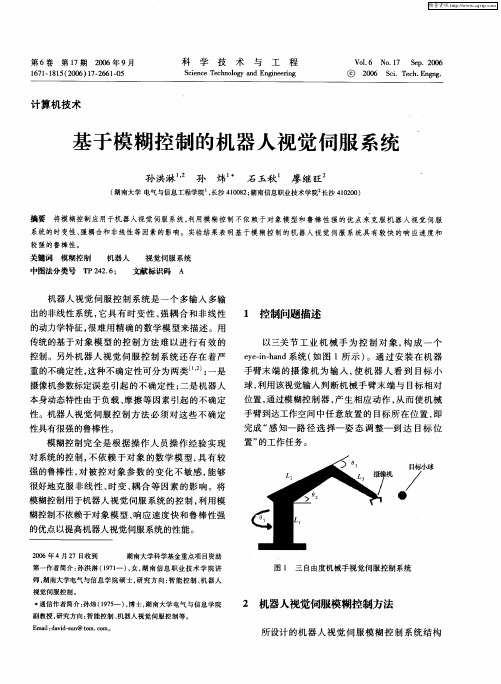
1 控 制问题描述
以三关 节 工业 机 械手 为 控 制对 象 , 成 一个 构 ee nhn 系统( 图 l y— —ad i 如 所示 ) 。通 过安装 在机 器 手臂末 端 的摄 像机 为 输入 , 机 器人 看 到 目标小 使 球, 利用该视觉输入判 断机械手臂末端 与 目标 相对 位置 , 通过模糊控制器 , 生相应动作 , 而使机械 产 从 手臂到达工作空间中任 意放 置的 目标所在位置 , 即 完成 “ 知一路 径 选 择一姿 态 调 整一到 达 目标 位 感 置” 的工作任务 。
目标小球
传统的基 于对象模型 的控 制方法难 以进行 有效 的
LabVIEW与机器人控制实现机器人运动控制

LabVIEW与机器人控制实现机器人运动控制在现代工业和科研领域中,机器人的运动控制是一个关键的技术。
为了实现精确、高效的机器人控制,科学家和工程师们利用了一种被称为LabVIEW的编程环境。
LabVIEW是一种图形化编程语言,它使用图形符号来代表程序的各个组成部分,使得程序设计变得直观而易于理解。
本文将介绍LabVIEW与机器人控制的结合,并探讨如何利用LabVIEW来实现机器人的运动控制。
一、LabVIEW概述LabVIEW(全称Laboratory Virtual Instrument Engineering Workbench,即实验室虚拟仪器工程化工作台)是由美国国家仪器公司(National Instruments)开发的一种图形化编程环境。
它以其直观、易于使用的特点而受到广泛的欢迎。
在LabVIEW中,程序员通过将图形符号连接起来来表示程序的逻辑结构,这些符号被称为虚拟仪器(Virtual Instrument)。
虚拟仪器中的图形符号代表了不同的函数或操作,通过将这些符号组合在一起,就可以实现复杂的功能。
二、LabVIEW在机器人控制中的应用1.机器人控制的基本步骤在介绍LabVIEW在机器人控制中的应用之前,我们首先来了解一下机器人控制的基本步骤。
(1)传感器读取:机器人通过传感器获取周围环境的信息,例如距离、角度、压力等。
(2)信号处理:机器人将传感器获取的原始数据进行处理,得到需要的信息。
(3)决策与规划:机器人根据信号处理的结果进行决策和规划,确定下一步的动作。
(4)执行控制:机器人根据决策和规划结果,通过执行器控制自身的运动。
2.利用LabVIEW实现机器人控制利用LabVIEW可以方便地进行机器人控制,下面将介绍LabVIEW 在机器人控制中的几个关键应用。
(1)传感器读取与数据处理:LabVIEW提供了丰富的传感器支持库,可以很方便地读取各种传感器的数据。
通过LabVIEW的图形化编程界面,可以将传感器读取的数据进行处理,提取出需要的信息。
机器人视觉伺服控制技术研究

机器人视觉伺服控制技术研究机器人技术是近年来得到快速发展的一项技术,利用计算机和机械等技术实现无人操作或自主操作是其主要应用之一。
在机器人技术应用中,视觉伺服控制技术被广泛应用和研究。
视觉伺服控制技术是利用视觉信息来控制机器人的运动,具有高精度、高速度和高灵敏度等特点,已成为机器人技术和工业自动化领域中的一个重要研究方向。
一、机器人视觉伺服控制技术的基本原理传统机器人控制方法通常是基于传感器和控制器的结合,但是这种方法往往需要复杂的算法和控制机制,导致其不稳定性和误差较大。
而视觉伺服控制技术就是利用机器视觉技术来获取机器人的运动和姿态信息,将其反馈到机器人控制器中进行处理和调整,实现更加精确和高效的控制操作。
视觉伺服控制技术的基本原理是将机器视觉技术应用于机器人控制中,利用机器人自身装备的摄像头、光学传感器等设备获取环境信息和机器人状态。
通过对图像和数据进行处理和分析,得到机器人与环境之间的距离、方向和速度等信息,从而实现机器人位置姿态的控制。
二、机器人视觉伺服控制技术的应用视觉伺服控制技术在机器人技术中有着广泛的应用,其中最主要的是在工业自动化领域中的应用。
工业机器人起初主要是用来实现物体的精准处理和组装等作业,而视觉伺服控制技术的应用则将机器人的控制精度和速度提高到了一个新的水平,使其可以更加精准、高效地完成装配、加工等工作。
此外,视觉伺服控制技术还广泛应用于智能安防、智能家居、医疗机器人、无人驾驶等领域。
智能安防领域中,利用机器视觉技术和视觉伺服控制技术可以实现智能视频监控和入侵检测等功能;在智能家居领域中,机器人可以通过视觉伺服控制技术完成物品清理、家庭安全监测等任务;在医疗机器人领域中,机器人可以通过视觉识别技术和视觉伺服控制技术实现手术、治疗等工作;在无人驾驶领域中,机器人可以通过视觉伺服控制技术获得道路和交通信息,实现车辆的自动操作。
三、机器人视觉伺服控制技术的发展趋势随着技术的不断发展和应用场景的不断扩大,机器人视觉伺服控制技术也在不断升级和改进。
LabVIEW的机器视觉应用实现智能视觉控制
LabVIEW的机器视觉应用实现智能视觉控制在科技发展日新月异的今天,机器视觉技术成为工业控制和自动化领域中不可或缺的重要组成部分。
作为一种重要的机器视觉开发环境,LabVIEW(Laboratory Virtual Instrument Engineering Workbench)不仅提供了强大的图形化编程功能,还能实现智能视觉控制。
1. 概述机器视觉是模仿人眼视觉系统,通过使用摄像机和图像处理算法,实现对物体进行检测、识别和测量的技术。
而智能视觉控制则是借助人工智能和深度学习等技术,使机器视觉系统具备更高级的智能决策和控制能力。
2. LabVIEW的优势LabVIEW作为一种专为测量和自动化控制而设计的编程平台,具有以下优势:- 强大的图形化编程环境:以数据流图(G图)形式编写程序,简化了复杂算法的实现和调试过程。
- 大量的图像处理工具包:包括边缘检测、形态学操作、区域分割等功能,方便开发人员进行图像处理和分析。
- 灵活的硬件支持:与各种图像采集设备、机器人控制器等硬件设备完美兼容,提供了广泛的应用场景。
3. 实现智能视觉控制的步骤基于LabVIEW,实现智能视觉控制主要包括以下步骤:- 图像获取:通过图像采集设备获取待处理的图像信息。
- 图像预处理:对获取到的图像进行灰度化、滤波等预处理操作,提高后续算法的准确性。
- 物体检测与识别:利用LabVIEW提供的图像处理工具包,实现对目标物体的定位、检测和识别。
- 决策与控制:基于物体检测和识别结果,实现相应的决策和控制逻辑。
可以利用机器学习算法对图像进行分类和判断,进一步提高智能决策和控制能力。
- 反馈与调整:根据控制结果的反馈信息,对系统进行调整和优化,进一步提升整体控制性能。
4. 实例应用:智能巡线小车以智能巡线小车为例,通过LabVIEW实现智能视觉控制:- 图像获取:小车搭载摄像头,实时获取巡线任务所在路线的图像。
- 图像预处理:对获取到的图像进行灰度化、滤波操作,消除干扰和噪声。
利用LabVIEW进行运动控制和机器视觉
利用LabVIEW进行运动控制和机器视觉LabVIEW是一款功能强大的图形化编程环境,可用于各种工程和科学应用。
其中,运动控制和机器视觉是LabVIEW的两个重要应用领域。
本文将介绍如何利用LabVIEW进行运动控制和机器视觉的开发,以及相关的技术和方法。
一、LabVIEW运动控制运动控制是一种控制机器或设备进行精确位置和速度控制的技术。
利用LabVIEW进行运动控制可以实现机器人的精确运动、生产线的自动化以及其他众多应用。
1. LabVIEW的运动控制模块LabVIEW提供了运动控制模块,通过该模块可以实现对各种运动设备的控制,包括伺服电机、步进电机、运动控制卡等。
利用该模块,可以轻松地编写程序进行运动控制应用的开发。
2. 运动控制的基本原理运动控制的基本原理是通过对电机施加适当的电流或电压来控制其转动。
LabVIEW通过调节输出信号的强度、频率和方向来实现对电机的控制。
3. 运动控制案例举例来说,我们可以利用LabVIEW实现一个小车的运动控制系统。
通过连接运动控制硬件和编写LabVIEW程序,可以实现对小车的精确控制,包括前进、后退、转弯等功能。
二、LabVIEW机器视觉机器视觉是利用摄像机和图像处理技术对物体进行识别、检测和分析的技术。
LabVIEW具有强大的图像处理功能,可以广泛应用于机器视觉领域。
1. LabVIEW的图像处理工具LabVIEW提供了丰富的图像处理工具,包括图像采集、图像处理、特征提取等功能。
通过这些工具,可以对图像进行处理和分析,实现机器视觉应用的开发。
2. 机器视觉的基本原理机器视觉的基本原理是通过对图像进行分析和处理,提取出有用的特征信息,实现对物体的识别和检测。
LabVIEW通过其图像处理工具包和丰富的函数库,提供了开发机器视觉应用所需的全部功能。
3. 机器视觉案例一个常见的机器视觉应用是自动检测和分类产品。
利用摄像机和LabVIEW的图像处理工具,可以对产品进行拍照,并通过分析图像中的特征进行自动分类和判定。
基于LabVIEW的模糊专家控制系统的设计与实现
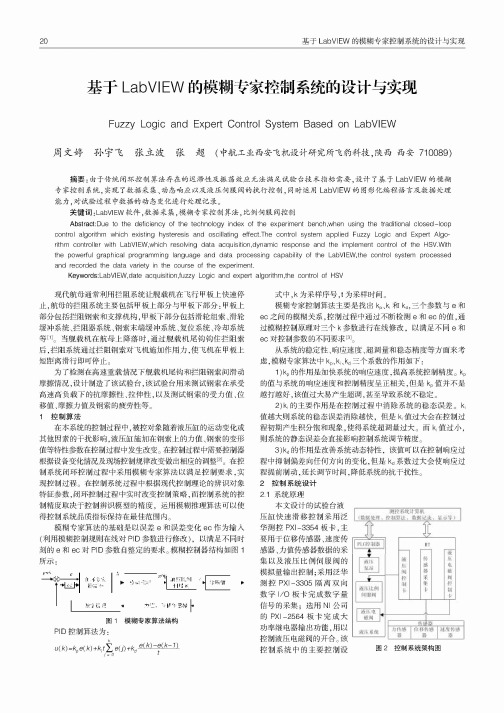
20基于LabVIEW 的模糊专家控制系统的设计与实现11.■述;ffl ^■ftV r控制系统架构图图、所示:图员模糊专家算法结构P ID 控制算法为:噪u(k)=kpe (k )+k ^ e(j)+kd e (k )原藻(k -1)集以及液压比例伺服阀的 模拟量输出控制;采用泛华测控PXI -3305隔离双向 数字I /O 板卡完成数字量 信号的采集;选用N I 公司的PXI -2564板卡完成大 功率继电器输出功能,用以 控制液压电磁阀的开合。
该 控制系统中的主要控制设基于LabVIEW 的模糊专家控制系统的设计与实现Fuzzy Logic and Expert Control System Based on LabV 旧W周文婷孙宇飞张立波张超(中航工业西安飞机设计研究所飞豹科技,陕西西安710089)摘要:由于传统闭环控制算法存在的迟滞性及振荡效应无法满足试验台技术指标需要,设计了基于LabVIEW 的模糊 专家控制系统,实现了数据采集、动态响应以及液压伺服阀的执行控制,同时运用LabVIEW 的图形化编程语言及数据处理 能力,对试验过程中数据的动态变化进行处理记录。
关键词院LabVIEW 软件,数据采集,模糊专家控制算法,比例伺服阀控制Abstract :Due to the deficiency of the technology index of the experiment bench,when using the traditional closed-loopcontrol algorithm which existing hysteresis and oscillating effect.The control system applied Fuzzy Logic and Expert Algo rithm controller with LabVIEW,which resolving data acquisition,dynamic response and the implement control of the HSV.With the powerful graphical programming language and data processing capability of the LabVIEW,the control system processed and recorded the data variety in the course of the experiment .Keywords :LabVIEW,date acquisition,fuzzy Logic and expert algorithm,the control of HSV现代航母通常利用拦阻系统让舰载机在飞行甲板上快速停 止,航母的拦阻系统主要包括甲板上部分与甲板下部分:甲板上 部分包括拦阻钢索和支撑机构,甲板下部分包括滑轮组索、滑轮 缓冲系统、拦阻器系统、钢索末端缓冲系统、复位系统、冷却系统等[1暂。
LabVIEW与机器人控制实现机器人运动规划与控制

LabVIEW与机器人控制实现机器人运动规划与控制LabVIEW与机器人控制实现机器人运动规划与控制机器人技术在现代工业和生活中的应用越来越广泛,而机器人的运动规划与控制是机器人技术的核心之一。
LabVIEW作为一种基于图形化编程的系统设计平台,提供了丰富的工具和功能,能够方便地实现机器人的运动规划与控制。
本文将介绍如何使用LabVIEW来实现机器人的运动规划与控制。
1. 硬件准备在开始使用LabVIEW进行机器人控制之前,我们首先需要准备机器人硬件。
这包括机器人机械结构、驱动器、传感器等。
根据具体的应用需求,选择合适的硬件设备,并确保其能够与LabVIEW相兼容。
2. 软件安装LabVIEW是一款商业软件,需要购买正版并安装在计算机上。
安装完成后,按照系统要求进行配置,并更新到最新的版本。
此外,还需要安装相应的机器人控制模块,例如LabVIEW Robotics Module,以提供专门的机器人控制功能。
3. 连接硬件将机器人硬件与计算机进行连接,通常使用USB、以太网等接口。
确保连接稳定可靠,并进行相应的驱动程序安装。
4. 建立机器人模型在LabVIEW中,我们需要建立机器人的数学模型,以便进行运动规划和控制。
这包括机器人的运动学和动力学模型。
通过利用LabVIEW提供的数学计算和图形处理功能,可以根据机器人的物理特性建立相应的模型。
5. 运动规划运动规划是指根据机器人的起始位置、目标位置和运动约束,确定机器人的轨迹和动作序列。
在LabVIEW中,我们可以利用其强大的图形化编程能力,设计运动规划算法。
例如,可以使用LabVIEW中的运动规划函数库,实现常见的路径规划算法,如最短路径规划、速度规划等。
6. 控制算法设计控制算法是实现机器人运动控制的关键。
在LabVIEW中,我们可以利用其图形化编程的特点,设计各种控制算法。
例如,可以使用PID控制算法来实现机器人的位置控制、速度控制等。
通过合理选择控制参数,并结合实时传感器数据反馈,可以实现高效准确的机器人控制。
LabVIEW中的模糊逻辑和控制系统设计
LabVIEW中的模糊逻辑和控制系统设计在LabVIEW中的模糊逻辑和控制系统设计LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种流行的可视化编程语言和开发环境,用于测量和自动化控制系统的设计与集成。
在LabVIEW中,模糊逻辑和控制系统设计是一种强大而灵活的方法,用于处理模糊信息和控制系统的模糊规则。
模糊逻辑是一种仿真人类思维的方法,能够有效地处理不确定性和模糊信息。
与传统的布尔逻辑不同,模糊逻辑允许根据多个条件的“程度”或“权重”进行推理和判断。
这种方式使得模糊逻辑在复杂和不确定的环境中具有更好的适应性和鲁棒性。
在LabVIEW中,可以通过使用Fuzzy Logic Toolkit和Control Design and Simulation Module等模块来实现模糊逻辑和控制系统设计。
这些模块提供了一系列的函数和工具,用于创建和管理模糊集合、模糊规则以及进行模糊推理和模拟。
在设计模糊控制系统时,首先需要定义输入和输出的模糊集合。
模糊集合通常使用三角形、梯形或高斯曲线等形状来描述。
在LabVIEW 中,可以使用Fuzzy Logic Toolkit提供的编辑器来创建和编辑这些模糊集合。
接下来,需要定义模糊规则。
模糊规则描述了输入和输出之间的关系。
例如,如果输入变量A的模糊值为“高”,则输出变量B的模糊值为“低”。
可以使用编辑器或编程方式来定义和管理这些规则。
完成输入和输出的定义后,可以进行模糊推理。
模糊推理是基于模糊规则和输入的模糊值来计算输出的模糊值的过程。
LabVIEW提供了各种函数和工具,用于执行这些计算和推理。
可以根据需要选择不同的推理方法,如模糊最小最大法(fuzzy min-max)、模糊均值最大化法(fuzzy centroid)、模糊加权平均法(fuzzy weighted average)等。
完成模糊推理后,可以通过进行模糊解模糊化来得到最终的输出。
LabVIEW在机器人视觉导航中的应用与实现

LabVIEW在机器人视觉导航中的应用与实现随着科技的不断进步与发展,机器人技术逐渐成为了人们生活中不可或缺的一部分。
机器人视觉导航作为机器人领域中的重要应用之一,为机器人在未知环境中自主导航提供了有效的解决方案。
而在机器人视觉导航的实现中,LabVIEW作为一种强大的开发工具,发挥着重要的作用。
本文将就LabVIEW在机器人视觉导航中的应用与实现进行探讨。
一、LabVIEW简介LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种图形化的编程语言,由美国国家仪器公司(National Instruments)开发。
LabVIEW以图形化的方式呈现编程代码,使得开发人员可以通过拖拽和连接不同的图形模块,而不是传统的编写代码,来实现功能。
LabVIEW的独特之处在于其数据流编程模型,使得程序执行按照数据流的方向流动。
这种特性使得LabVIEW成为一种理想的工具来处理各种传感器输入和控制输出。
二、机器人视觉导航的基本原理机器人视觉导航是指机器人通过摄像头或其他视觉传感器获取周围环境的信息,并利用这些信息进行自主导航。
在机器人视觉导航中,常用的技术包括图像处理、目标检测和识别、路径规划等。
图像处理是机器人视觉导航的基础,它涉及到对图像进行预处理、滤波、增强等操作,以便提取出图像中有用的特征信息。
目标检测和识别是机器人视觉导航中的重要一环,通过训练分类器或者使用深度学习方法,机器人可以对图像中的目标进行定位、识别和跟踪。
路径规划则是机器人根据目标位置和当前环境信息确定合适的路径,使机器人能够安全、高效地到达目的地。
三、LabVIEW在机器人视觉导航中的应用1. 图像处理LabVIEW提供了丰富的图像处理函数库,开发人员可以根据需要选择适合的函数进行图像预处理、滤波、增强等操作。
同时,LabVIEW还支持并行处理,可以对多个图像进行同时处理,提高处理效率。
LabVIEW中的模糊逻辑控制与智能优化
LabVIEW中的模糊逻辑控制与智能优化LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种广泛应用于科学研究、工程技术和教育领域的图形化编程环境,其引入了模糊逻辑控制与智能优化的概念,以提高控制系统的性能和可靠性。
一、模糊逻辑控制1. 模糊逻辑概述模糊逻辑是一种用于处理不确定性和模糊性问题的数学工具,与传统的逻辑控制方法相比,模糊逻辑控制能够更好地处理模糊和非精确的输入,从而提高控制系统的适应性和稳定性。
2. 模糊逻辑控制的原理模糊逻辑控制基于模糊规则和模糊推理,通过将模糊集和模糊关系应用于系统输入与输出之间的映射,实现对控制系统的模糊控制。
它采用模糊集合的运算和模糊逻辑规则的推理来处理具有模糊性质的输入和输出。
3. 模糊逻辑控制在LabVIEW中的实现LabVIEW提供了一套完整的模糊逻辑控制工具包,包括模糊逻辑建模、模糊规则设计和模糊推理等功能。
用户可以通过可视化界面,利用LabVIEW提供的模糊逻辑控制工具包进行系统建模、规则设计和控制参数优化,从而实现对控制系统的模糊控制。
二、智能优化1. 智能优化概述智能优化是一种利用智能算法搜索和优化问题解的方法,通过模拟生物进化、群体行为或其他智能机制,不断搜索最优解并优化系统性能。
与传统的优化方法相比,智能优化方法具有适应性强、全局搜索能力好等优点。
2. 智能优化算法LabVIEW中集成了多种智能优化算法,如遗传算法、粒子群算法、蚁群算法等。
用户可以通过LabVIEW提供的工具包选择适合的算法,并利用其在控制系统设计和优化问题中的应用。
三、LabVIEW中的模糊逻辑控制与智能优化的应用案例1. 温度控制系统以温度控制系统为例,通过LabVIEW中的模糊逻辑控制与智能优化方法,可以实现对温度控制过程的精确控制。
用户可以通过模糊逻辑控制建模工具包,对温度控制系统进行建模和规则设计;然后利用智能优化算法,对模糊控制器的参数进行优化,以提高控制系统的性能。
基于LabVIEW的模糊控制器设计与改进初探

基于LabVIEW的模糊控制器设计与改进初探刘 航 徐 杜 摘 要 基于美国N I公司的图形化软件开发平台L ab-V IEW及其模糊逻辑工具包(Fuzzy L og ic fo r G T o olkit),本文介绍了将L abV IEW应用于基本模糊控制器设计的方法,同时针对其模糊逻辑工具包的不足之处提出了一些改进措施。
关键词 L abVI EW 模糊控制器 模糊逻辑工具包模糊控制是基于规则的一种智能控制,它不依赖于被控对象的精确数学模型,特别适宜对具有多输入一多输出的强耦合性、参数的时变性和严重的非线性与不确定性的复杂系统或过程的控制,且控制方法简单,实际效果好,近年来在各个工程领域得到了广泛应用[1]。
模糊控制器的设计可以通过专用的模糊逻辑开发工具,如美国国家半导体公司的M eu-fuz4,德国Info rm公司的F uzzy T ECH3.0等[2],但这些系统价格昂贵。
而如果通过自行编程完成模糊控制器的设计,则开发时间长,效率低且通用性差。
美国国家仪器公司(N ational Instruments)提供了基于L abV IEW的模糊逻辑工具包(F uzzy L og ic for G T oolkit),通过它可以在L abV IEW环境下方便快速地实现基本模糊控制器的设计。
一、LabVIEW及其模糊逻辑工具包L abVI EW是N T公司推出的一种虚拟仪器软件开发平台,其最大的特色是采用编译型图形化编程语言——G语言(G raph pr og r amming),即用户设计好程序的大体框架后,如同画流程图一般,只需将系统提供的各种图形化功能模块连接起来,就可得到所需的应用软件[4]。
L abVI EW中的程序称为V I(Virtual Instr um ents),每个V I由三个部分组成,即前面板用户界面、后台的框图程序和图标/连接口。
前面板是用于模拟真实仪器的用户面板;框图程序则是利用图形语言对前面板上的控件对象进行控制;图标/接线端口用于把L abV IEW程序定义成一个子程序,从而实现模块化编程。
模糊控制课程教学中LabVIEW示例的应用与探讨-2019年教育文档
模糊控制课程教学中LabVIEW示例的应用与探讨ExampleanddiscussionofLabVIEWsoftwareapplicationin the fuzzy control courseLin JianhuiBeijing forestry university, Beijing, 100083, China: Focus on the development of fuzzy control, thesimulation of LabVIEW software was introduced into thefuzzy control course. This paper detailed thefuzzificationofinputandoutputandthebuildingoffuzzycontrolrulers.Afuzzycontrols imulationsystemwasbuiltwith the example of electro-hydraulic position servosystems. After comparing with normal closed-loopcontrolsystem,itwillincreasethe students’ understanding andencourage study initiative on fuzzy control course.1965年,美国数学家Zadeh创立了模糊理论,并将其应用到控制工程中,最近十年来,模糊控制系统成功应用的实例层出不穷,模糊控制已经成为现代智能控制理论中重要的分支[1-3]。
我校针对自动化专业学生的就业需求,已在本科生教育中单独开设了模糊控制这一课程。
根据牛津英语词典的解释,“模糊(fuzzy)”一词的含义为“朦胧的,不精确的,不合乎逻辑的,不明白的”。
但实际上,模糊系统是一个被精确定义的系统,模糊控制也是一种被精确定义的特殊的非线性控制[4]。
LabVIEW中模糊控制器的设计及应用
LabVIEW 中模糊控制器的设计及应用裴 锋,杨万生(武汉大学动力与机械学院,湖北武汉430072) 摘要: 通过火电厂给水加氨模糊控制实例,详细介绍利用LabV IEW 提供的模糊逻辑工具箱(Fuzzy Logicfor G Toolkit )设计开发模糊控制器的方法。
关键词: LabV IEW ;模糊控制器;给水;虚拟仪器 中图分类号:TP3 文献标识码:B 文章编号:100023932(2004)(01)200412031 引 言众所周知,经典控制理论解决线性定常系统的控制问题是很有效的。
现代控制理论在军事科学、空间飞行等方面得到了成功的运用。
然而对于传统控制方式,用计算机实现控制,首先要设定控制目标值,根据被控制对象的特性变化和环境变化,通过负反馈原理不断进行调节以跟踪目标值。
要设计一个满足控制目标的控制器,必须有控制数学模型,对被控制对象的物理系统作数学抽象。
而实际应用中被控制对象能用传统数学模型描述其内在特性及其变化规律的不是很多,甚至原则上说根本就没有,只是有些简单系统可以忽略其次要因素而进行某种简化,这种抽象实际上是用精确的数学形式对真实的物理系统所作的近似描述。
人们对于绝大多数系统的认识都是相当粗略的,特别是对那些复杂的非线性系统,多因素的时变系统等。
模糊控制是以模糊论集、模糊语言变量和模糊逻辑推理为基础的一种控制方法,从行为上模仿人的模糊推理和决策过程的一种智能控制方法。
它先将操作人员或专家的经验制定成模糊控制规则,然后把来自传感器的信号模糊化,并用此模糊输入适配控制规则,完成模糊逻辑推理,最后将模糊输出量进行解模糊化,变为模拟量或数字量,加到执行器上。
模糊逻辑本身是一种系统的推理方法,其控制策略来源于专家语言信息,因而能够解决许多复杂而无法建立精确数学模型系统的控制问题。
2 LabVIEW 模糊逻辑工具箱简介LabVIEW 的模糊逻辑工具箱(Fuzzy Logic for G Toolkit )用于设计基于规则的模糊控制器,主要应用领域为工业过程控制及专家系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
! 系统组成
本系统在 BCD;%33;B % 自由度机器人和 EFC-CF 实
>%&+! )&+3
(
(!)
雅可比矩阵的行列式为:
图 ’ 分布式机器人视觉伺服系统
-% N+9(%/+!)QRO#!>+9(+3P))OKI#! 雅可比矩阵的逆为:
? 国家自然科学基金项目(编号:239!2,23!3%39$) 收稿日期:!33#—3%—!0
研究与开发
图%
基于 )*+(,-. 的通讯服务端程序图
,/ 0123* 45-6 78379 ,/ 01:* *;< 0123+ 45-6 7837! ,/ 01:+ *;< 0123= 45-6 7837$ ,/ 01:= *;< 0123< 45-6 7837% ,/ 01:< 45-6 7837# 当 793$、7!3#、7$3’、7%3’、7#39" 时, 令 *3!、+39#、=3%#、<3’#。
( ! ( ! " ! !
图!
机器人视觉闭环控制系统结构
!" T0U #"P%S("(0)’"P(?S)*+,!!(0)’"P%S T"P%$?S)%(0) U ,-.!!(0) 在 !(O%"V , !!O%"V 的状态点,使用不同的控制算法进 行了对比实验,得到图 # 所示的实验曲线。本文用 1、 2 方向差值绝对值的最小值 3. 来构造模糊集合(如图 ?) , 利用 04 对系统进行模糊控制。 实验中,把规则简化为:
式的语言,程序代码也是图形化的代码,使编程过程更加 接近人的思维,设计者无需写任何文本格式的代码 [?] ,上 面图像处理的例子充分说明它是真正的工程师语言。另 外,其具有强大的外部接口能力,可以实现与外部的应用
图$
基于 4567 8-,-+. 9+: ;2<84=> 的图像处理程序图
!"
机电工程技术 !""# 年第 $% 卷第 & 期
! !
!" O"P%S("&"P(?S)*+,!!’"P%S("P%$?S)%),-.!! 在实验中取采样时间为 #"Q,,所以可得离散化的运动 控制器为(0O",(,!……) : ! (0’()’! (0) ! " ! (0’()’! (0) 0)&"P(?S ( O" ! "P%$?S)%(0) ) "P(?S"( " ! (0) &("P%$?S)%(0))"P%S*+,! (0) &"(0)&"P%S,-.! (0) %(0’()’%(0) ! " "(0’()’%(0)
$ 视觉伺服机器人的运动学模型
根据 BCD>%33>B 机器人的机械结构及 G>H 方法 [%] , 摄像机成像原理 [#] 及本文只研究平面跟踪问题(实际过 程中 !" 不变) ,建立系统的图像雅克比矩阵: J’ ・ #! ・ J’ ・ ! "> (’OKI " >%& ! " $ >%& ! ! S $ # " %! " " " 9 $N " # ・ " (!PJ* %" % % (9) ( QRO # ( PJ * 9 ! ! S " )P E ・ )P E "P ! " %# ・ #! & " " # " & 式中 #9、#! 为机器人一轴和二轴的转角,(9 、(!、J*、 J’ 为机器人的结构参数," 为摄像机透镜的焦距,)、% 为 成像坐标。 " , !" , +9N(9 " , !", +!NJ’ " , !";则 令 +3N( (!PJ*) ・ ・ ・ 公式(9)简化为: -%. >%&+ /+ OKI# ’ )&+ &+ QRO#
% 视觉伺服闭环控制系统的结构
本文构造的是 /0/’-.’12.3 视觉伺服系统,一般采用 ) & # ! ( 基于图像的运动控制。本系统选用的运动控制器为: $ $’ ’ ) ! % !( ・ #" !"’(
!"
) % ) "
,其中 " 为控制算法,本文分别就普通的比例
控制和模糊控制进行研究,图 ! 是本机器人的控制系统结 构图。 图像处理对于视觉伺服是重点和难点,本文利用虚拟 仪器公司的 4567 8-,-+. 9+: ;2<84=> 进行编程,实现图 像的二值化、模式识别、特种提取等功能,图 $ 是其图形 化程序。 ;2<84=> 是基于图形化的软件编程平台,是数据流图
9 引言
当今世界有超过 0@9"# 台各种类型的工业机器人应用 在工业领域
[9]
时图像采集系统的基础上,在硬件层面用以太网连接两个 独立系统并把实时图像采集系统的 EEG 传感器安装在机器 人执行器末端形成 H)IJ>KI>LML 结构 [$} ,在软件层面运用 ()*+,-. 编程技术有机结合两系统,实现视觉闭环控制, 其组成如图 9 所示。在实时图像采集系统中加入模式识 别、特种提取及发送反馈误差 ! 等用于视觉伺服的软件功 能模块,在机器人控制系统中加入接收反馈误差 !、根据 特征期望值 !J 与反馈误差 ! 进行跟踪的闭环控制等软件功 能模块,在不破坏两独立系统的前提下成功构造了机器人 视觉伺服系统。 A其数目还在不断增加;大部分机器人无法
[!]
适应较复杂的环境,这极大限制了机器人的发展和应用范 围的进一步扩大 。视觉伺服的引入使机器人适应多种复 杂环境成为可能,随着计算机技术的飞速发展和数字图像 处理技术的日益成熟,视觉伺服成了机器人发展的新热 点。早在上世纪 01 年代,关于“视觉伺服”的论文已有 发表,但视觉伺服在技术和价格的高门槛,使其研究和使 用范围的发展并不理想;借用分布式系统的概念构造机器 人视觉伺服系统,将对机器人视觉伺服系统的研究、开发 及应用等均带来好处。 本文在现成的 % 自由度机器人和实时图像采集系统 的基础上,运用 4, 公司的 ()*+,-. 实现两系统的有机 结合,构造了分布式闭环视觉伺服系统。首先建立视觉 伺服系统的运动学模型,然后利用 ()*+,-. 编程实现物 理系统及进行相关控制算法的研究。
对简单形状物体的二维运动跟踪,同时具有灵活、方便、
图#
( 方向的响应曲线
本文在 ! 方向上抽取了一些点,比较普通控制与模糊 控制的跟踪效果,得表 9。实验表明采用模糊控制后,系 统在跟踪速度和跟踪精度都得到了很好的改善。
表9 时间 UPV 像数差 U783!V 像数差 U/Rcc^V ( 方向模糊控制与 783! 的数据对比 "J& h$JD’ &DJD9 9J%# $$J## $J"% !J%# A!9J9D A"J$9 $J& %JD A$J%&
!!
研究与开发
!"’(# ( !" $ )% ! &($ ’%’( *+,! )
" " ( !
机电工程技术 !""# 年第 $% 卷第 & 期
"&$! (!’"&((,-.!!
"
($)
软件(如 >+:3@=A*/B 等) 、 C 语言、 >-.3+D, 6E4、 56FG ;6H 等编程语言之间的通讯,可用的外部接口有: I;;,、 C4J、 II=、 56F;6H、 6*K-L/ M 等,用 ;2<84=> 编写模 块程序可轻松实现与现有系统的无缝连接。 本研究使用 ;2<84=> 语言编写了模式识别、特种提 取、数据通讯、视觉闭环控制等所有软件功能。其中的数 据通讯模块的编程,选用了 N/:L/:’CB-/.K 通讯模式,编写 了如图 % 所示的程序图,实现了 N/:L/: 功能。编程时,只 、“ FCE’>:-K/” 、“ FCE’ 需放入几个诸如“ FCE’;-,K/.” CB+,/’C+../*K-+.”等图形化的代码,再把这些“代码”用 连线接起来以构造其逻辑关系,最后加上必要的循环和结 束控制等,程序编写方便、快捷。用类似的方法可完成的 客户端程序图及图 ! 中的运动控制器等相关软件。
# 实验结果
本文所使用的机器人系统的相关参数如下: *(O"P!Q,*!O"P($RQ,# + ,-O(PR?,3.O"P"%$Q,3/#"P"&Q 由此得到:("#"P%$?SQ,((#"P%SQ,(!#"P(?SQ 所以:!"’(# ( !" "P%$?S)% "&"P(?S ! " &("P%$?S)%’"P%S*+,! )"P(?S’"&"P%S,-.!
’ 结论
本实验使用了固高科技的四自由度 >?@A%""A> 工业 机器人系统,有 9 个 B6,C B0A9D$" 摄像头、 EFA(,GEA G,>EE 图像采集卡、 EFAFE@A H00EE 图像处理卡及 0%