视觉伺服控制算法优化综述
伺服控制器的参数优化方法详解
伺服控制器的参数优化方法详解伺服控制器是一种用来控制伺服电机运动的设备,通过调节控制器的参数,可以实现对伺服电机的精确控制。
参数优化是指在给定的系统要求下,通过改变参数的值,使得控制系统的性能得到最佳的改善。
本文将详细介绍伺服控制器的参数优化方法。
一、参数优化的意义在实际应用中,伺服控制器的性能直接影响到系统的运动响应速度、稳定性和精度。
通过参数优化,可以得到最佳的控制效果,提高系统的性能。
参数优化还可以降低系统的能耗,提高系统的稳定性和可靠性,减少故障发生的几率。
二、传统的参数优化方法1.经验法:传统的参数优化方法常常基于工程师的经验和实验数据,通过不断调整参数的值,直到满足系统要求为止。
这种方法简单易行,但需要耗费大量的时间和资源,并且无法保证最优的结果。
2.试错法:试错法是指通过试验和反馈的方式,不断调整参数的值,直到满足系统要求。
这种方法比较直观,但需要通过大量试验来确定参数的值,效率低下。
3.基于模型的优化方法:这种方法基于系统的建模和优化算法,通过数学模型和计算机模拟,得到最佳的参数值。
常用的方法包括遗传算法、粒子群算法等。
这种方法的优点是能够得到较好的优化效果,但需要对系统进行准确的建模和大量的计算,复杂度较高。
三、自适应控制器参数自整定方法自适应控制器是指通过监测和分析控制系统的反馈信号,自动调整控制器的参数,使其适应系统的变化。
常用的自适应控制器参数自整定方法有以下几种:1.极点配置法:极点配置法是通过改变系统的极点位置,来控制系统的动态响应。
通过合理选择极点的位置,可以使系统的稳定性和动态性能得到改善。
但是,该方法需要对系统进行精确的建模和系统的数学分析,适用性受到一定的限制。
2.自调整控制器(SAC):自调整控制器是一种通过不断调整参数来降低系统误差的方法。
它通过分析系统的反馈信号,根据误差的大小和方向,自动调整控制器的参数。
这种方法不需要对系统进行精确的建模,适用性较广。
机器人视觉伺服系统综述

机器人视觉伺服系统综述摘要:对机器人视觉伺服系统进行阐述,介绍了机器人视觉伺服系统的概念、发展历程以及研究背景;并从不同的角度对机器人视觉伺服系统进行了分类。
最后介绍了该领域的研究现状、所取得的成就,以及今后的发展趋势。
关键词:机器人;视觉伺服;综述Survey of robot visual servoing systemAbstract:: In this paper,the survey of robot visual servoing system are introduced.The paper reviews the concept and history background of robot visual servoing system.This article also classify the robot visual servo system from different aspects. Finally, it introduce the research status quo, achievements and future trends in the field.Key words:robot, visual servoing, summary1.引言随着先进科学技术的不断发展,机器人已经在生产和生活中起到了越来越重要的作用,因次人们不断对机器人技术提出更高的要求。
为了使机器人能够完成更加复杂的工作,适应更加复杂的环境,机器人不仅需要更加完善的控制统,还需要能够更多的感知环境的变化。
而影响其发展的一个重要原因就是机器人缺少像人一样的感知能力,在人们为机器人添加各种外部传感器的过程中,机器人视觉以其信息大、信息完整成为最重要的机器人感知功能[1]。
机器人的视觉伺服系统是机器人的视觉和机器人控制的相结合的复杂系统。
其内容包括了图像的采集与处理、运动学和动力学、自动控制理论及其系统数据实时分析等领域于一体的新兴交叉学科。
视觉伺服控制
有约束的无标定模型预测控制在视觉伺服控制器的设计中,图像雅可比矩阵是建立运动学模型的关键。
经典的IBVS采用比例控制律,它利用图像雅可比矩阵的逆(或伪逆)。
然而,比例控制器可能存在局部极小问题。
也就是说,如果视觉特征数大于3,则图像雅可比矩阵不是满秩的,图像误差可能存在于图像雅可比矩阵的逆(或伪逆)的零空间中,从而导致局部收敛,使得最终的图像特征远离期望的图像特征。
另外,系统约束处理困难,尤其是可见性约束。
当相机的初始位置和所需位置之间的距离较大时,图像特征将不可见。
在视觉伺服控制过程中,可能会违反关节的物理限制和机器人的工作空间。
此外,比例控制器的主要缺点是需要知道摄像机内参数、摄像机外参数和特征点的深度参数,而这些特征点的精确值很难获得。
为了避免使用图像雅可比矩阵中元素的精确值,人们对图像雅可比矩阵的数值估计进行了广泛的研究,如神经网络、迭代学习、拟牛顿方法和模糊控制。
文献提出了许多基于深度无关交互(或图像雅可比)矩阵的自适应控制器,以克服深度限制问题。
文献首次针对摄像机参数未知且深度随时间变化的固定摄像机构型,提出了与深度无关的交互矩阵。
文献提出了眼在手和固定眼构型的自适应视觉跟踪控制的统一设计方法。
然而,这些方案没有明确考虑系统约束,而这些约束对于视觉伺服控制器的设计是至关重要的。
已经提出了许多方法来处理有约束的视觉伺服任务。
例如路径规划、非线性反馈等,但大多需要给定摄像机的外部参数,并且假定摄像机的内部参数和深度信息是已知的。
在IBVS中,通常采用模型预测控制(Model Predictive Control,MPC)来处理系统约束,且MPC控制器具有在未知影响和模型误差的情况下对系统进行控制的能力。
因此,MPC算法可以用来设计无标定环境下的视觉伺服控制器。
本章主要提出了一种新的基于MPC的IBVS设计方法,该方法明确地考虑了系统的约束条件,能够有效地处理未知的摄像机参数和深度参数。
通过模型预测控制获得控制输入,通过参数估计算法在线更新预测模型的未知参数,完成视觉伺服任务。
机器人视觉伺服研究综述

二、机器人视觉伺服技术综述
1、研究背景和意义
机器人视觉伺服技术的研究背景主要源于两个方面:一是机器人智能化发展的 需求,二是计算机视觉技术的不断发展。随着机器人应用领域的不断拓展,机 器人需要具备对环境的感知和识别能力,以便更好地适应复杂环境。同时,计 算机视觉技术的不断发展也为机器人视觉伺服提供了更好的实现手段。
针对以上挑战,可以采取以下解决方案:一是采用高性能的图像采集设备和技 术,提高图像质量;二是优化算法和计算方法,提高计算效率;三是采用并行 计算和优化算法设计等方法,提高实时性;四是采用自适应滤波、鲁棒性特征 提取等技术,提高算法的鲁棒性。
三、结论
机器人视觉伺服技术是实现机器人智能化的重要手段之一,具有广泛的应用前 景。本次演示对机器人视觉伺服技术的研究现状进行了简要概括,并介绍了其 研究背景和意义、原理和实现方法、在各个领域的应用以及面临的挑战和解决 方案。随着计算机视觉技术的不断发展,机器人视觉伺服技术的研究和应用将 不断深化和拓展。未来的研究将集中在提高算法的鲁棒性、计算效率和实时性 方面,并探索新的应用领域。
二、机器人视觉伺服技术综述
1、研究背景和意义
机器人视觉伺服技术的研究背景主要源于两个方面:一是机器人智能化发展的 需求,二是计算机视觉技术的不断发展。随着机器人应用领域的不断拓展,机 器人需要具备对环境的感知和识别能力,以便更好地适应复杂环境。同时,计 算机视觉技术的不断发展也为机器人视觉伺服提供了更好的实现手段。
机器人视觉伺服技术的研究意义在于提高机器人的感知和识别能力,从而实现 更加精确的控制。在制造业、医疗、航空航天等领域,机器人视觉伺服技术的 应用可以提高生产效率、降低成本、提高产品质量和精度。
Hale Waihona Puke 2、原理和实现方法机器人视觉伺服技术的原理是基于计算机视觉技术,通过图像采集设备获取环 境图像,再经过图像处理和分析,得到环境信息。根据环境信息,机器人可以 实现对环境的感知和识别,并调整自身的位姿,从而实现对机器人的精确控制。
伺服电机控制算法研究与优化
伺服电机控制算法研究与优化摘要:伺服电机控制是现代工业领域中广泛应用的一种控制技术,能够实现精准控制和运动。
本文旨在研究与优化伺服电机控制算法,提高系统的性能和效率。
首先介绍了伺服电机的基本原理和控制方式,然后重点针对速度环、位置环和电流环控制算法进行了深入的研究与分析,并提出了一些优化策略和方法。
最后通过实际案例验证了优化算法的有效性。
关键词:伺服电机控制;算法研究;优化策略;性能提升;实际应用一、引言伺服电机控制是一种用于实现精确控制和运动的技术,在各个工业领域有着广泛的应用。
伺服电机通过对输出信号的控制实现对位置、速度和力矩的精确控制,因此对控制算法的研究与优化显得尤为重要。
二、伺服电机的基本原理与控制方式伺服电机是一种特殊的直流电动机,通过内部的控制系统实现对输出转矩、转速和位置的控制。
它由电动机、编码器(或位置传感器)、驱动器和控制器组成。
通常情况下,伺服电机的控制方式包括开环控制和闭环控制两种。
开环控制主要通过对电机的输入信号进行人工设定来控制电机的速度和位置,缺乏对实际输出的监测和修正,因此容易受到外界干扰和变化的影响,控制精度较低。
闭环控制通过不断监测和调整电机的实际输出信号来实现对速度和位置的精确控制。
在闭环控制中,控制器接收电机的实际输出信号并进行比较,根据误差信号调整控制信号,通过反馈机制实现优化控制。
三、基于速度环的伺服电机控制算法研究在伺服电机控制系统中,速度环是实现精确速度控制的重要环节。
精确的速度控制能够使电机在不同负载和运动速度下保持稳定性,并提高系统的动态响应速度。
常见的基于速度环的控制算法有比例积分控制算法和模糊PID控制算法。
比例积分控制算法通过调整比例系数和积分时间来实现对速度误差的修正,能够减小速度误差和震荡现象,但对于负载变化较大的情况下,仍然存在较大的误差。
模糊PID控制算法引入模糊逻辑理论,在传统PID控制算法的基础上,通过模糊推理来修正PID参数,实现对速度误差的快速响应和精确控制。
视觉伺服系统的控制算法及实验研究

学位论文
视觉伺服系统的控制算法及实验研究
视觉伺服系统的控制算法及实验研究
摘要
通常意义上的传感器所获取到的信息比较单一,不足以应对智能机器人的需求,但是视觉模块能够获取到极其丰富的信息。基于视觉的伺服系统的研究受到机器人开发工作者的青睐,并成为当前国内外机械伺服系统研究领域的热点。
The main study content of this topic is the control algorithm and experimental research of visual servo system, the main object of study is two degrees of freedom mechanical arm platform which based onMPC08SPmovement control card.Purpose of this topic is based on visual feedback as the core to build its closed loop control system for searching and positioning on the target object.
随着我国自动化水平的提高,基于视觉的伺服系统也逐步受到研究人员的青睐。80年代末,清华大学计算机系研制的Eye-in-Hand就是一种典型的“眼一手”系统,该系统由PUMA560机械手、Image Box图像系统、SUN工作站和PC—AT组成,在机械手的顶部有一台摄像机,主要用来观测工作台的全景,在机械手的末端有CCD摄像机和半导体激光发生器,它能完成多种精密的装配任务[1]。
6.1.8 Labview人机界面16
机器视觉的伺服控制技术简述
机器视觉的伺服控制技术简述1.前言机器视觉通过图像摄取装置将被摄取目标转换成图像信号,即用机器代替人眼来测量和判断,它是快速发展的人工智能领域的重要分支。
机器视觉的伺服控制通过对来自图像提取装置的图像信息,分析其像素分布和亮度、颜色等,提取目标特征,进而结合控制需求来控制现场的设备动作。
机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。
机器视觉的应用有助于提高生产的柔性和自动化程度。
在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大幅提高生产的自动化程度和效率。
随着机器视觉技术的发展与成熟,基于机器视觉的自动监测与智能控制系统将广泛应用于电子制造、半导体、汽车、交通、工业生产等各个领域,并主要从中端生产线向前端制造和后端物流环节延伸,成为提升产业自动化水平、实现中国制造 2025 的重要技术手段。
二、机器视觉及其伺服控制技术的国内外研究现状机器视觉包括数字图像处理技术、机械工程技术、控制技术、光学成像技术、传感器技术、计算机技术等,是一门多学科交叉融合技术。
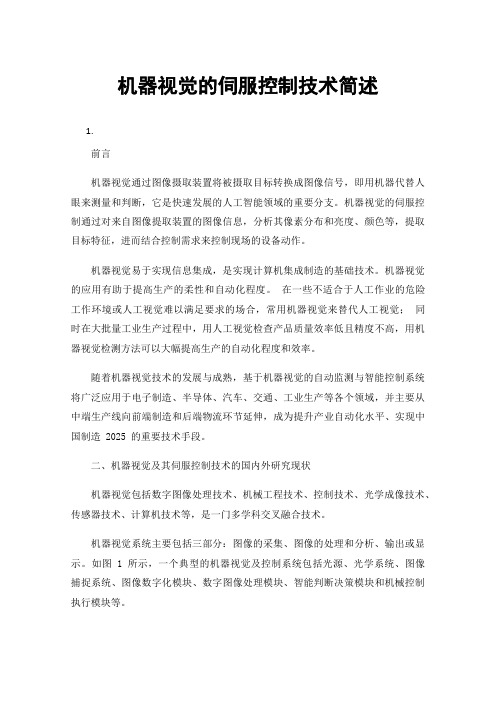
机器视觉系统主要包括三部分:图像的采集、图像的处理和分析、输出或显示。
如图 1 所示,一个典型的机器视觉及控制系统包括光源、光学系统、图像捕捉系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块等。
图1 机器视觉及控制系统组成其中,采用CCD 摄像机等的光学成像系统和图像捕捉系统将被摄取目标转换成图像信号,在经采集与数字化后传送给专用的图像处理与决策系统,它根据像素分布和亮度、颜色等信息,对这些信号进行各种运算来提取目标的特征(面积、长度、数量及位置等),最后根据预设的容许度和其他条件输出结果(尺寸、角度、偏移量、个数、合格/不合格及有/无等);上位机实时获得检测结果后,指挥运动系统等控制执行模块执行设定的控制操作。
视觉伺服综述

视觉伺服综述一、视觉伺服定义:视觉伺服是利用视觉信息控制机械手末端执行器与目标物体之间的相对位姿(pose:position and orientation),或者是利用一组从图像中提取的特征来控制机械手末端执行器与该组特征之间的相对位姿。
根据利用图像信息的不同,可以将视觉伺服分为基于位置的视觉伺服、基于图像的视觉伺服和2.5D视觉伺服。
如果将视觉伺服控制应用到移动机器人,例如自治车辆、自治飞行器和自治潜水器,那么就是利用视觉信息或者一组从图像中提出的特征信息来控制机器人与目标物体之间的相对位姿。
因此,可以认为视觉伺服控制是一门多学科交叉的研究领域,它涉及许多学科,主要包括:数字图像处理、数字信号处理、实时系统、控制理论、运动学、动力学、计算机视觉和机器人学等。
到了80年代末、90年代初,关于视觉伺服的论文数量明显增加,这得益于个人计算机处理能力的提高以及摄像机技术的发展。
因为在个人计算机性能提高之前,研究视觉伺服需要专用的、价格昂贵的采用流水线技术的像素处理设备,因此,当个人计算机性能大幅度提高以后,越来越多的学者加入到视觉伺服控制研究领域,大大地提高了视觉伺服控制研究方面的论文数量。
针对视觉伺服的应用,各国学者也提出了很多的应用原型,例如:从传送带上抓取零件、零件装配、机器人遥操作、导弹跟踪图像系统、水果采摘、汽车无人驾驶和飞机降落等。
二、视觉伺服系统的组成一个典型的工业机器视觉应用系统包括光源、光学系统、图像捕捉系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块。
系统首先采用CCD摄像机或其它图像拍摄装置将目标转换成图像信号,然后转变成数字化信号传送给专用的图像处理系统,根据像素分布、亮度和颜色等信息,进行各种运算来抽取目标的特征,根据预设的容许度和其他条件输出判断结果。
三、视觉伺服控制的研究内容典型的视觉伺服控制任务通常有:①定位问题(positioning),即通过视觉信息控制机械手末端执行器对准目标物体,也就是控制机械手末端执行器运动到理想位姿。
伺服系统中的运动控制算法优化研究

伺服系统中的运动控制算法优化研究伺服系统是一种通过对运动控制对象施加外部力或力矩,使其按照预定要求执行规定运动轨迹的控制系统。
运动控制算法是伺服系统中的核心部分,它决定了系统的动态响应性能、稳定性以及能耗等方面的指标。
因此,对运动控制算法的优化研究具有重要的理论和实际意义。
当前,随着工业自动化的不断发展,对伺服系统的性能要求也越来越高。
为了满足这一需求,运动控制算法的优化成为了研究的热点之一、在伺服系统的运动控制算法优化研究中,以下几个方面具有重要意义。
首先,传统的PID控制算法是伺服系统中最常用的算法之一,但它在一些高性能应用中存在一些不足之处。
因此,需要对PID控制算法进行优化,如采用更高级的控制策略,如模糊控制、自适应控制、预测控制等。
这些控制策略可以在不同的工况下对PID参数进行自适应调整,从而提高控制性能。
其次,伺服系统中的运动控制算法往往有多个输入和输出,涉及到多个变量之间的相互影响。
如何建立准确的数学模型,并进行有效的参数估计,是运动控制算法优化中的一个关键问题。
目前,基于系统辨识理论的运动控制算法优化方法已取得了一定的成果,但还存在一些问题,比如模型不准确、参数估计不稳定等。
因此,需要进一步研究如何提高参数估计的准确性和稳定性。
此外,伺服系统中的运动控制算法的优化研究还需要考虑系统的动态响应速度和稳定性。
在一些高精度应用中,系统的动态响应速度非常关键,需要采用更高级的控制方法来提高系统的动态性能。
同时,为了保证系统的稳定性,还需要研究如何设计合适的控制器参数以及系统的反馈机制。
最后,伺服系统中的运动控制算法的优化还需要考虑系统的能耗。
在工业应用中,伺服系统通常需要长时间工作,如果能耗过大会导致生产成本的增加和资源浪费。
因此,研究如何优化运动控制算法以降低系统的能耗是伺服系统优化研究的一个重要方向。
综上所述,伺服系统中的运动控制算法优化研究具有重要的理论和实际意义。
当前,虽然已经取得了一些成果,但还存在许多问题亟待解决。
伺服系统中的控制算法优化

伺服系统中的控制算法优化在工程应用中,伺服系统的位置与速度控制问题一直是重点研究的领域之一。
控制算法的优化有助于提高系统响应性、稳定性和精度,从而实现更好的性能和效果。
本文将重点介绍伺服系统中的控制算法优化及其在实际应用中的重要性。
一、伺服系统的基本结构伺服系统是一种闭环控制系统,其通常由以下几个基本部分组成:1. 执行机构:电机、液压缸等。
2. 传感器:用于检测执行机构的位置或速度等信息。
3. 控制器:将传感器所获取的信息与期望输出进行比较,从而生成控制信号,控制执行机构的运动。
4. 反馈系统:将实际输出与期望输出进行比较,从而实现控制系统的闭环控制。
二、控制算法的优化在伺服系统中,控制算法的优化是非常重要的。
优化的目标是提高系统响应性、稳定性和精度。
1. 响应性:指系统对于输入信号的快速响应能力。
采用合适的控制算法,可以提高系统的响应速度,实现更快的动态响应。
2. 稳定性:指系统在受到干扰或扰动时能够保持稳定的能力。
一个稳定的系统可以在给定的精度水平下稳定地控制输出变量,避免不必要的振荡。
3. 精度:指系统输出的精确程度。
采用优化的控制算法可以实现更高的精度,提高系统的控制精度和稳定性。
三、常见的伺服系统控制算法1. PID控制算法:PID控制算法是一种经典的控制算法,它根据控制器的误差、偏差和积分来生成控制信号。
PID控制器的参数需要经过调节才能实现最优性能。
2. 模糊控制算法:模糊控制算法是一种基于模糊逻辑的控制算法,它通过模糊逻辑推理出一个模糊输出,然后根据模糊输出生成控制信号。
3. 智能控制算法:智能控制算法是一种基于人工智能的控制算法,比如神经网络控制和遗传算法控制等。
这些算法在控制系统中的应用越来越广泛。
四、优化的控制算法在伺服系统中的重要性伺服系统的控制算法优化不仅仅可以提高系统性能,还可以减少系统的成本和维护费用。
采用优化的控制算法可以使系统更加稳定和精确,从而减少机械振动和结构变形,延长机械部件的寿命,减少维修次数和维修费用。
机器人视觉伺服系统综述
基于图像的机器人视觉伺服系统综述摘要:本文介绍了机器人视觉伺服系统的概念、发展历程,而且从不同的角度对机器人视觉伺服系统进行了分类。
最后重点介绍了基于图像的机器人视觉伺服系统,以及其的simulink仿真实现。
关键词:机器人;视觉伺服;仿真Abstract:The concept and development process of the robot visual servo system is introduced in this paper, and from different angles of the robot visual servo system are classified. Finally the paper introduces the robot visual servo system based on image, and the realization of Simulink simulation.Key words: robot, visual servoing, simulation1.引言随着先进科学技术的不断发展,机器人已经在生产和生活中起到了越来越重要的作用,因此人们不断对机器人技术提出更高的要求。
为了使机器人能够完成更加复杂的工作,适应更加复杂的环境,人们不断的为机器人寻求更为完善的控制系统。
而影响其发展的一个重要原因就是机器人缺少像人一样的感知能力,在人们为机器人添加各种外部传感器的过程中,机器人视觉以其信息大、信息完整度高成为最重要的机器人感知功能。
机器人的视觉伺服系统是机器人视觉和控制的相结合的复杂系统。
其内容包括了图像的采集与处理、运动学和动力学、自动控制理论及其系统数据实时分析等领域于一体的新兴学科。
随着技术的发展,以及相关理论的日益完善,视觉伺服已具备了在实际中应用的条件;而随着机器人应用领域的不断扩展,重要性也不断提高,与其相关的技术问题已经成为了当前的研究热点。
机器人视觉伺服控制技术研究

机器人视觉伺服控制技术研究机器人技术是近年来得到快速发展的一项技术,利用计算机和机械等技术实现无人操作或自主操作是其主要应用之一。
在机器人技术应用中,视觉伺服控制技术被广泛应用和研究。
视觉伺服控制技术是利用视觉信息来控制机器人的运动,具有高精度、高速度和高灵敏度等特点,已成为机器人技术和工业自动化领域中的一个重要研究方向。
一、机器人视觉伺服控制技术的基本原理传统机器人控制方法通常是基于传感器和控制器的结合,但是这种方法往往需要复杂的算法和控制机制,导致其不稳定性和误差较大。
而视觉伺服控制技术就是利用机器视觉技术来获取机器人的运动和姿态信息,将其反馈到机器人控制器中进行处理和调整,实现更加精确和高效的控制操作。
视觉伺服控制技术的基本原理是将机器视觉技术应用于机器人控制中,利用机器人自身装备的摄像头、光学传感器等设备获取环境信息和机器人状态。
通过对图像和数据进行处理和分析,得到机器人与环境之间的距离、方向和速度等信息,从而实现机器人位置姿态的控制。
二、机器人视觉伺服控制技术的应用视觉伺服控制技术在机器人技术中有着广泛的应用,其中最主要的是在工业自动化领域中的应用。
工业机器人起初主要是用来实现物体的精准处理和组装等作业,而视觉伺服控制技术的应用则将机器人的控制精度和速度提高到了一个新的水平,使其可以更加精准、高效地完成装配、加工等工作。
此外,视觉伺服控制技术还广泛应用于智能安防、智能家居、医疗机器人、无人驾驶等领域。
智能安防领域中,利用机器视觉技术和视觉伺服控制技术可以实现智能视频监控和入侵检测等功能;在智能家居领域中,机器人可以通过视觉伺服控制技术完成物品清理、家庭安全监测等任务;在医疗机器人领域中,机器人可以通过视觉识别技术和视觉伺服控制技术实现手术、治疗等工作;在无人驾驶领域中,机器人可以通过视觉伺服控制技术获得道路和交通信息,实现车辆的自动操作。
三、机器人视觉伺服控制技术的发展趋势随着技术的不断发展和应用场景的不断扩大,机器人视觉伺服控制技术也在不断升级和改进。
机器人视觉伺服综述_赵清杰
第16卷第6期V ol.16N o.6 控 制 与 决 策CON T ROL A N D D ECI SI ON 2001年11月 No v.2001 文章编号:1001-0920(2001)06-0849-05机器人视觉伺服综述赵清杰,连广宇,孙增圻(清华大学计算机系,北京100084)摘 要:系统论述了机器人视觉伺服发展的历史和现状。
从不同角度对机器人视觉控制系统进行分类,重点介绍了基于位置的视觉伺服系统和基于图像的视觉伺服系统。
对人工神经网络在机器人视觉伺服方面的应用情况作了介绍。
讨论了视觉伺服中图像特征的选择问题。
对机器人视觉所涉及的前沿问题进行阐述,并指出了目前研究中所存在的问题及今后发展方向。
关键词:机器人;视觉伺服;人工神经网络;特征选择中图分类号:T P242.6 文献标识码:ASurvey of Robot Visual ServoingZH A O Qing-j ie,L I A N Guang-y u,SUN Zeng-qi(Departm ent o f Computer,T sing hua U niver sity,Beijing100084,China)Abstract:T he hist or y and cur rent r esearch of r obo t visual serv oing are r eviewed.R obot visual co ntro l sy st ems can be categ or ized accor ding to differ ent cr iter ia.Based o n the feedback r epresentation,vision-based r obo t co ntro l techniques can be classified into po sitio n-based contr ol and imag e-based contr ol,w hich ar e discussed in detail.T he applica tio n of neur al netw or ks in vision-based r obo t sy st ems is intr o-duced.F eatur e selectio n in visual serv oing is discussed also.Sev eral advanced pr oblems and the direc-tion in the r esea rch of r obot vision ar e po inted o ut.Key words:r obo ts;visual serv oing;ar tificial neur al netw o rk;feature selection1 引 言 制造能够替代人劳动的机器一直是人类的梦想。
视觉伺服移动机器人目标识别定位及控制方法研究

视觉伺服移动机器人目标识别定位及控制方法研究视觉伺服移动机器人目标识别定位及控制方法研究一、引言随着科技的不断进步和机器人技术的快速发展,移动机器人在各个领域中的应用越来越广泛。
其中,视觉伺服移动机器人在工业自动化、服务机器人、医疗机器人等领域发挥着重要作用。
本文将对视觉伺服移动机器人目标识别定位及控制方法进行研究,力求提出一种高效、精准的方法。
二、视觉伺服移动机器人目标识别算法1. 图像获取与预处理首先,移动机器人需要获取待识别目标所在区域的图像。
通常情况下,机器人会配备摄像头或激光雷达等传感器,用于图像或点云数据的获取。
然后,对获取到的图像进行预处理,包括灰度化、平滑、边缘检测等操作。
2. 特征提取与描述接下来,需要从预处理后的图像中提取出能够代表目标特征的信息。
常用的特征提取方法有颜色特征、纹理特征和形状特征等。
同时,还需要将提取出的特征进行描述,以方便后续的目标匹配与定位。
3. 目标匹配与定位通过比对目标特征描述符与数据库中保存的特征描述符,可以实现目标的匹配与定位。
常见的匹配算法有最近邻匹配、支持向量机(SVM)等。
通过匹配结果,可以确定目标所在的位置及姿态信息。
三、视觉伺服移动机器人目标控制方法1. 基于控制算法的移动通过获取到的目标位置信息,可以设计控制算法实现机器人的移动。
常用的控制算法包括PID控制、模糊控制、自适应控制等。
通过调整机器人的速度和方向,使得机器人能够实现到达目标位置的控制。
2. 视觉伺服控制视觉伺服控制是指机器人根据目标的位置变化实时调整自身的运动。
这种控制方法可以实现目标的跟踪和追踪,适用于需要保持机器人与目标之间的相对位置关系的应用场景。
常用的视觉伺服控制方法有线性伺服控制、非线性伺服控制等。
四、实验结果及分析为了验证上述算法的有效性,我们进行了一系列实验。
首先,通过实际机器人的摄像头获取目标图像,并对图像进行预处理。
然后,提取目标图像的特征描述符,并进行目标匹配与定位。
伺服控制系统的优化设计和实现

伺服控制系统的优化设计和实现伺服控制系统是机械电子控制领域中非常重要的一种系统,它主要用于精密控制,如机械手臂、飞控系统、机车和机器人等方面的应用。
伺服控制系统的作用是实现对某种流量、力量、角度或位移等精密控制的实现。
本文将围绕着伺服控制系统的优化设计和实现,探讨其基本原理、优化方法及实现方案。
一、伺服控制系统的基本原理伺服控制系统是一种反馈控制系统,其基本结构如下图所示:其中,信号源发出期望信号S目,信号经过比较后,误差信号E输出给控制器,控制器对误差进行相应处理,然后将处理后的信号发送到执行机构,执行机构将机械运动转换为电信号,反馈给比较器,形成闭环控制。
伺服控制系统的关键在于:通过控制器对误差信号进行处理,使执行机构能够更快、更准确地进行控制。
伺服控制系统中最常见的控制器是PID控制器,即比例、积分、微分控制器。
二、伺服控制系统的优化方法伺服控制系统在应用中存在诸多问题,例如:机械结构的精确度、电器元件的性能、控制复杂度等。
因此,在实际应用中,需要对伺服控制系统进行优化。
(一)优化PID参数PID控制器是伺服控制系统中最常用的控制器,也是最容易进行优化的部分。
对于PID控制器的优化,有以下几个方面:1.比例系数Kp:增加Kp可增加系统的响应速度,但若Kp太大,可能会导致系统出现震荡和不稳定的情况。
2.积分时间Ti:增加Ti可使系统更快地消除偏差,但同样存在过度振荡的风险。
3.微分时间Td:增加Td可减少过度振荡,但可能会导致系统变得慢反应。
针对PID控制器的优化,可以根据实际情况,采取多种方法进行调整,建立数学模型并进行优化计算。
(二)优化机械结构伺服控制系统中的机械结构非常重要,其精度与机械运动的响应速度和准确度直接相关。
因此,在实际应用中,需要对机械结构进行优化,例如:1.改进传动系统,使用更精密的减速器和传感器;2.加强机械结构的稳定性,增加支撑和润滑;3.优化机械屏幕的设计,减少机械振动和误差;通过对机械结构的优化,可以提高伺服控制系统的精度和稳定性,从而更加准确地实现控制目标。
视觉伺服系统约束优化控制及实验研究的开题报告
视觉伺服系统约束优化控制及实验研究的开题报告一、选题背景视觉伺服系统广泛应用于机器人、加工、装配、制造等领域中。
视觉伺服控制的优劣直接影响着系统的性能。
然而,现有的视觉伺服控制策略往往存在系统约束不充分、控制精度不高等问题。
在实际应用中,这些问题容易导致系统响应速度缓慢或控制精度较差,无法满足实际应用需求。
因此,开展视觉伺服系统约束优化控制及实验研究对于提升视觉伺服系统的性能具有重要意义。
二、研究内容本研究的主要内容包括:1. 综述视觉伺服控制研究现状及存在问题。
2. 基于模型预测控制(MPC)策略,构建视觉伺服系统数学模型,并分析系统约束条件。
3. 分析视觉伺服系统约束条件对系统控制的影响,并提出优化控制策略。
4. 设计实验验证优化控制策略的有效性,并与传统视觉伺服控制策略进行比较分析。
三、研究意义通过本研究,可以进一步优化视觉伺服系统的控制策略,充分考虑系统约束条件,提高系统的响应速度和控制精度,在实际应用中发挥更大的作用。
四、研究方法本研究采用理论分析和实验验证相结合的方法进行研究。
在理论研究中,采用模型预测控制(MPC)策略构建视觉伺服系统数学模型,并分析系统约束条件及其对控制策略的影响。
在实验验证中,设计合理的实验方案,通过实验验证优化控制策略的有效性。
五、预期成果本研究的预期成果包括:1. 重点论述视觉伺服控制的现状及存在问题。
2. 基于模型预测控制(MPC)策略,构建视觉伺服系统数学模型,并分析系统约束条件。
3. 提出一种优化控制策略,针对系统约束条件进行优化处理,提高系统的响应速度和控制精度。
4. 设计实验进行优化控制策略的有效性验证,与传统控制策略展开比较分析。
六、进度安排本研究的进度安排如下:1. 第一阶段(1个月):研究视觉伺服控制的现状及存在问题。
2. 第二阶段(2个月):基于模型预测控制(MPC)策略,构建视觉伺服系统数学模型,并分析系统约束条件。
3. 第三阶段(3个月):针对系统约束条件,设计优化控制策略,并进行理论分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
视觉伺服控制算法优化综述摘要:系统论述了视觉伺服控制的应用现状。
重点介绍了针对不同的实际情况,提出优化的基于位置的视觉伺服系统和基于图像的视觉伺服系统的控制算法。
优化后的算法效率高,具有很强的有效性和可行性。
优化后的控制系统功能更强,更精确有效。
关键词:视觉伺服;优化;算法Survey of Visual Servoing control algorithmAbstract:The application status of the visual servo control are reviewed . For different realities , we put fortward an improved position-based visual servo systems and image -based visual servo control algorithm of the system. High efficiency of the improved algorithm has strong effectiveness and feasibility. The improved control system functions stronger, and become more precise and effective.Keywords:Visual Servoing;improve;Algorithm1 引言随着科技的快速发展,在现代工业自动化生产过程中,机器视觉正成为一种提高生产效率和保证产品质量的关键技术,如机械零件的自动检测、智能机器人控制及生产线的自动监控等。
基于视觉的伺服策略是采用相机所观察的特征来控制机器人移动的一种灵活有效的方法。
视觉伺服主要分为3种:基于位置的视觉伺服(PBVS)、基于图像的视觉伺服(IBVS)和混合控制视觉伺服。
早期的研究主要是基于位置的视觉伺服研究,近年来主要是基于图像的视觉伺服研究。
PBVS的反馈偏差在3D笛卡尔空间进行计算,IBVS的反馈偏差在2D图像平面空间进行计算。
PBVS 的控制方式直接在笛卡尔空间下进行位姿估计和运动控制,具有很好的直观性和简单有效性。
IBVS的控制方式其期望给定值直接以图像特征信息表示,所以不需要将特征信息投影逆变换到工作空间的过程,因此基于图像的控制方式对标定误差和空间模型误差不敏感,具有更高地定位精度,为多数的视觉伺服系统所采用。
2 视觉伺服控制算法在进行任何一个基于伺服控制的控制系统的分析、综合或设计时,首先应建立该系统的数学模型,确定其控制算法。
它反映了系统输入、内部状态和输出之间的数量和逻辑关系,这些关系式为计算机进行运算处理提供了依据。
控制算法的正确与否直接影响控制系统的品质,甚至决定整个系统的成败。
2.1 基于位置的视觉伺服算法的优化对于不同的功能要求,采用传统的基于位置的视觉伺服控制算法,常常造成稳定性不够、精度不够、准确性不足等问题,我们需要对算法进行优化处理,来满足要求。
例如,针对家庭环境中服务机器人物品的抓取问题,提出一种改进的基于位置的视觉伺服抓取算法。
该算法主要包括4个部分:1.基于Naomark 标签的物体识别,根据Naomark的ID确定抓取方式,并利用世界单应分解算法对目标物位姿进行估计。
通过在具有不同形状和特征的各类物品上布置Naomark 标签的方式,可以实现被操作物的快速识别与定位,从而解决家庭环境中物品种类多、操作方式复杂带来的困难。
利用Hough 变换和边缘检测可以得到Naomark 的各特征点。
2.对NAO机器人的五自由度手臂进行运动学建模,计算出运动学正解和逆解。
NAO 手臂具有5个自由度,其结构图如图2-1所示。
肩膀处有俯仰和横滚2个自由度,肘部具有偏转和横滚2个自由度,腕部具有偏转1个自由度。
除此之外,手爪具有1个张合自由度。
根据确定好的各连杆坐标系,可以得到Modified Denavit-Hartenberg 运动学参数。
由此可确定NAO 手臂的运动学模型。
如图2-2所示。
图2-1 NAO 手臂的结构图 图2-2 NAO 手臂的各连杆坐标系3.设计单臂抓取和双臂抓取的PBVS 控制律,并提出双臂抓取在运送物品过程中需满足的条件;(1)单臂抓取的PBVS 控制律:PBVS 控制律是根据摄像机测得的物体位置求出抓取成功时的可按式计算。
( ( ( (2.1)根据求得的e r T 和运动学逆解可得到各关节的期望角度值 ,定义误差*θθ-=e ,设定关节控制量为e 的10%,每次关节移动后,进行实时视觉反馈得到最新的期望角度值和实时关节值采样得到最新的误差,重复此过程让末端执行器逐步逼近物品完成抓取。
(2)双臂抓取的PBVS 控制律:由获取到的抓取成功时末端执行器与目标物体坐标系的相对位姿与R O T , 可由式算出 R r T 、L r T , 运动学逆解出左臂和右臂各关节的期望角度值,控制左臂和右臂逐步逼近目标物体完成抓取。
(2.2)(2.3)抓取成功后,左臂、右臂、物体构成一个闭式运动链。
(3)在抓取到物体进行运送的过程中,双臂的位姿需要满足约束关系。
(2.4)(2.5)*θe rT L oT其中,1)(-=OROLRL TTT是个常数阵,在物品运送过程中应保持不变。
4.引入路径规划,对原有 PBVS 算法进行改进。
在整个抓取控制过程中,利用基于位置的视觉伺服原理设置路径点{ p 1 ,p 2,…,p n} 能很好的解决这个问题,该末端执行器到达各路径点处的位姿通过相对于目标物坐标系的旋转平移关系PiO T确定,PBVS 控制原理图如图2-3所示。
图2-3 增加路径点的PBVS控制原理图这样控制过程被分成n + 1 段,机械臂末端执行器由初始位置到达各路径点,再由第n个路径点趋近并到达目标位姿完成抓取。
控制律为: (((( (2.6)(2.7) 2.2 基于图像的视觉伺服算法的优化为了满足不同的功能需求,在基于图像的视觉伺服控制的基础上,必须优化算法,改进方法,更好的实现功能。
2.2.1极线几何与三角几何算法相结合运用已找到的特征点,如图2-4使用极线几何与三角几何的特点来控制机器人运动,使之到达目标位置。
在整个过程可以由两步来实现。
第一步为调整实际视角相机的方向,使之与目标视角相机方向一致;调整初始位置的机器人方向,使之与目标位置机器人方向一致。
第二步为移动机器人,使之到达目标位置。
此时平移可以采取上三角形平移与下三角形平移两种方式。
图2-4 全景相机的极线几何模型2.2.2 立体视觉算法和设备跟踪算法相结合此类视觉伺服系统是将立体视觉算法和设备跟踪算法相结合,通过目标跟踪算法和卡尔曼滤波算法完成设备区域的提取和跟踪,立体视觉跟踪算法被限定在设备跟踪窗内的有限区域内,有效降低了算法运算量,大大提高了算法的实时性。
系统通过双目立体视觉算法实现设备三维信息的准确获取,并将该位置信息反馈机器人控制系统,形成伺服控制系统。
此类算法已经用于高压带电作业机器人视觉伺服系统。
高压带电作业机器人视觉伺服系统由机器人控制单元、高压带电作业机器人、双目相机和视觉定位单元组成。
如图2-5所示。
图2-5 高压带电作业机器人视觉伺服系统框图图2-6为视觉定位方法的流程框图。
其中,初始化操作作用是人工指定图像中要操作设备的感兴趣区域;卡尔曼滤波用于消除设备跟踪过程中出现的错误,提高跟踪的准确性。
图2-6 视觉定位流程图2.2.3 视觉阻抗补偿随着计算机视觉技术的发展,可以对运动目标进行实时的视觉检测,获取机器人末端和运动目标的位置,将视觉反馈信息与阻抗控制相结合,使机器人系统跟踪目标阻抗,并保证阻抗跟踪误差的渐近收敛。
基于视觉阻抗补偿的运动目标捕捉系统结构如图2-7所示,其根据视觉阻抗反馈控制机器人末端快速接近运动目标,实现对运动目标的捕捉。
图2-7 视觉阻抗控制系统结构基于CMAC 网络的视觉阻抗反馈补偿能根据视觉反馈误差,对位置控制器的输出进行补偿,确保得到平稳柔顺的期望阻抗。
2.2.4 基于DSP 系统的视觉伺服将视觉伺服应用于涂胶过程中,把视觉系统嵌入涂胶机器人系统的反馈回路中,实现机器人高精度控制。
在图像信息中进行胶线曲线提取,使用形态学的方法进行胶线曲线细化,得到胶线骨架信息,判断胶线闭合性,检测胶线的质量。
涂胶机器人采用CCD+DSP的架构,系统包括机器视觉伺服和涂胶机器人两个部分。
系统软件模块主要包括工件识别模块、胶线NC 代码生成模块、胶线质量检测报警模块等。
工件识别技术是本文软件模块的重要环节,主要通过零件存在性及相似性判断来识别工件。
图像矢量化技术、工件骨架提取和零件骨架拟合是胶线 NC代码生成模块的重要技术。
变速箱的密封性能是靠完整连续的胶线实现的,所以胶线的质量是必须要检测的一个重点。
首先进行图像采集,在该图像中提取胶线信息。
使用直接色彩判断无需过多计算,速度快,适用于嵌入式系统。
然后再用形态学腐蚀的方法细化胶线曲线。
再对图像进行阈值分割,提取出胶线信息后,采用拉普拉斯算子对胶线的二值图像进行边缘检测,当拉普拉斯算子输出出现过零点时,就表明有边缘存在。
然后,通过边缘跟踪,来判断提取胶线断点,并做出断点报警。
2.2.5 基于视觉伺服的航天器实际控制算法在实际飞行控制中,设雅克比矩阵伪逆的估计值为Lˆ,则我们可以将控制e律设计为:(2.8)由于相机与航天器固连,其速率可等效为被控对象的速率,这种算法将被控对象作为理想的定位设备,没有考虑运动机构的实际跟踪能力和动力学特性,仅用一个微分环节代替,故算法的速率输出是理论值。
在实际控制中应作为控制器的输入连入回路,在设计合理的速度控制律的同时,还应考虑其在空间轨道的相对运动及执行机构的控制能力和控制方案。
考虑一类带动量轮系统的航天器,利用飞轮机构的转动惯量变化产生的反作用力矩来对轨道舱进行姿态机动控制。
其设计基于速度偏差的PD 控制律:(2.9)相机以及被控对象的笛卡尔路径会出现不期望的运动。
其在光轴方向会远离目标,再返回,称为摄像机回退现象。
在极端情况下,如大角度机动,z方向的回退会过大而导致系统不稳定。
为了解决这个问题,考虑将z 轴的旋转和平移与其他两个轴的旋转和平移分开控制,即选择不同的特征向量和控制律。
用数学形式表示即为:(2.10)2.2.6图像矩和矢量积法针对“眼在手上”六自由度机械臂系统,提出一种基于图像的视觉伺服控制。
通过图像矩和矢量积法,建立机器人正向、逆向运动学模型,引入雅可比矩阵解决机器人逆运动学解析问题.建立了图像矩特征变化量和笛卡尔空间的关节角速度之间的映射关系即复合雅可比矩阵,由矩特征变化量得到伺服过程中六自由度机器人各关节角速度。
保证在图像逼近期望图像时,机械臂末端到达期望位置,并且此时关节角速度将收敛到零。