Chp05机械振动
主要施工机械设备一览表

功率(千瓦)
价值(万元)
自有或租赁
原值
净值
31
多功能工程坡度检测仪
TES-2
1
总机械装备功率4千瓦
0.8
0.6
32
砼压力试验机
JS750L/北京
1
总机械装备功率72千瓦
5.5
5.2
33
角向电钻
DA300V型/日本坂田
2
总机械装备功率12千瓦
0.4
0.34
34
灰浆搅拌机
湖北/2002
1
总机械装备功率43千瓦
1
总机械装备功率27千瓦
4.2
3.4
18
海南银象埋弧焊机
ZD5-1000
2
总机械装备功率34千瓦
2.5
2.3
19
装载机
ZL-18
1
总机械装备功率162千瓦
18.5
17.4
20
履带式长螺旋钻机
CFG24.25G型
1
总机械装备功率23千瓦
13
11
21
自卸汽车
江淮HPC1040合肥
1
总机械装备功率81千瓦
1
总机械装备功率232千瓦
22
20
45
轻型载货汽车
江铃JX1021南昌
1
总机械装备功率88千瓦
8.2
7.9
46
二氧化碳体保护焊机
ZD5-360
1
总机械装备功率33千瓦
2.5
1.8
47
经纬仪
J-Z型1995
1
总机械装备功率2千瓦
0.4
0.3
48
万能检测仪
HYCZ-5自动车辙试验仪

HYCZ-5自动车辙试验仪用途本产品适用于测定沥青混合料的高温(浸水或非浸水)抗车辙能力,供沥青混合料配比设计的高温(浸水或非浸水)稳定性检验使用。
我所是中华人民共和国交通行业标准(JT\T670-2006)车辙试验机的主要编制单位,HYCZ-5型自动车辙试验仪(科研型)为编制此标准的样机。
本机所用试验方法及各项技术指标均符合中华人民共和国行业标准《公路工程沥青及沥青混合料试验规程》(Standard Test Methods of Bitumen and Bituminous Mixtures for Highway Engineering)JTG E20 -2011中沥青混合料车辙实验T 0719-2011的试验规程和各项要求。
特点●温度控制采用PWM调制方式控制,同时控制:浸水车辙试验水箱内水的温度;恒温箱内的环境温度。
●温度箱采用外循环加热方式,加热源通过管道与恒温箱连接,形成热动平衡,温场更均匀。
●试验时同时显示时间与位移、时间与温度变化曲线,为研究沥青混合料车辙特性的科研单位特供实践依据。
●采用绝对温度传感器采集温度,长时间试验无温度漂移(杜绝了一般热力电隅温度传感器长时间温度漂移对实验数据的影响)。
●本机自带恒温箱可同时预热4个试镜,节省试验时间。
●本机机械结构采用轮动方式,与国外产品机械结构相同,试验数据更接近实际情况。
●本机试验时试模厚度范围0~100mm,不须调整,满足不同路面层面的车辙试验要求。
●试验轮压强可适当提高,以满足不同实验要求。
◆HYCZ-5A型(双试验轮)自动车辙试验仪可同时做两个试模的浸水或非浸水车辙试验,可同时预热八个试模。
◆HYCZ-5C型(三试验轮)自动车辙试验仪可同时做三个试模的浸水或非浸水车辙试验,可同时预热九个试模。
◆HYCZ-5D型(四试验轮)自动车辙试验仪可同时做四个试模的浸水或非浸水车辙试验,可同时预热十个试模。
主要技术指标位移检测范围:0 ~ 30 mm变形检测分辨率:0.001 mm变形检测精度:±0.005 mm温度控制范围:40 ~ 80 ℃(任意可调)温度检测分辨率:0.1 ℃温度控制精度:±0.3℃试轮的橡胶硬度(国际标准硬度):78±2(60℃)试轮接地压强:0.7MPa±0.05MPa小车行走速度:42次/min ±1次/min小车行走距离:230±10 mm车辙实验时间:20---300 min(任意可调)电源:380V 50HZ 3KW(需有工作零线);220V 500WJT/T 670-2006. 车辙试验机[S]. /p-92912435.html所涉核心技术研究动态期刊文献[01] 曹志清. HCS—01型车辙试验机[J]. 航天技术与民品, 2000.07[02] 王昌衡,龚平,卢少林. 沥青混合料车辙试验的影响因素分析[J]. 西部探矿工程, 2005.07[03] 贾娟,张肖宁. 沥青混合料车辙试验方法的比较分析[J]. 公路, 2004.11[04] 钱勇. 沥青混合料车辙试验中应注意的问题[J]. 湖南城市学院学报(自然科学版), 2005.01[05] 唐前松,唐柳. 沥青混合料高温稳定性的车辙试验研究[J]. 公路与汽运, 2004.06[06] 贾乐,卢立军,苏杰,刘福生. 黑龙江省沥青混合料车辙试验简析[J]. 黑龙江交通科技, 2001.02[07] 崔节兴;. 沥青混合料车辙的影响因素分析[J]. 科技信息, 2011.04[08] 李申惠,廖卫东,李向东,李娜,吴瑞麟. 超载、超高温条件下全厚式路面车辙试验研究[J]. 武汉理工大学学报, 2003.12车辙试验机校准规程/p-146930470.html车辙试验机检定规程/p-79063326.html路面车辙自动测定仪检定指标及检定方法研究/p-117046337.html。
机械振动实验指导书
机械振动实验指导书基础与实验教学中心机械与动力工程学院上海交通大学目录安全注意事项 ....................................... 错误!未定义书签。
实验预备知识 DHVTC振动测试与控制实验系统组成与使用方法错误!未定义书签。
实验一振动系统固有频率的测量 ..................... 错误!未定义书签。
实验二无阻尼单自由度系统强迫振动特性的测量 . (11)实验三有、无阻尼单自由度系统自由衰减的测量 (16)实验四拍振实验 (20)实验五三自由度系统各阶固有频率及主振型的测量 (25)实验六动力吸振器吸振实验 (28)实验七悬臂梁模态测试 (32)实验八被动隔振实验 (35)实验安全注意事项本实验系统尽管在设计、加工和安装时已充分考虑了安全方面的问题,但强烈建议学生使用时注意如下事项:一、通电前仔细检查各活动机械部分,如激振器、偏心电机等的连接紧固情况,确保所有螺栓、卡扣等紧固无误,避免激振或旋转。
二、查看传感器、信号源、激振器等连线正确无误,确保各仪器正常工作。
三、检查各仪器电源线是否插紧插好,各仪器是否可靠接地,以防触电。
四、调压器应放置于桌面宽敞处,尽可能远离其它仪器,并且在使用时只有经检查无误后才能通电,通电前须仔细检查电机偏心轮是否紧固、调压器与电机连线、接地是否可靠,使用完毕应立即断电。
五、激振器和偏心电机工作时,禁止手或是其它物品碰到激振器顶杆和电机偏心轮,以免受伤或物品飞落。
六、所有仪器设备工作过程中发现异常应立即断电,并请专业人员检查维修。
实验预备知识: DHVTC振动测试与控制实验系统组成与使用方法一、DHVTC振动测试与控制学生实验系统的组成如图1-1所示,本系统由“振动测试与控制实验台”、“激振与测振系统”、“动态采集分析系统”组成。
⑴——底座⑸——非接触式激振器⑼——电式速度传感器⒀——单/双自由度系统⑵——支座⑹——接触式激振器⑽——被动隔振系统⒁——压电式加速度传感器⑶——三自由度系统⑺——力传感器⑾——简支梁/悬臂梁⒂——电涡流位移传感器⑷——薄壁圆板⑻——偏心电机⑿——主动隔振系统⒃——磁性表座图1-1 DHVTC振动测试与控制学生实验系统示意图1.1 振动与控制实验台振动测试与控制实验台由弹性体系统(包括简支梁、悬臂梁、薄壁圆板、单双自由度系统、三自由度系统模型)组成,配以主动隔振、被动隔振用的空气阻尼减震器、动力吸振器等,可完成振动与振动控制等20多个实验项目。
机械传动系统中的强迫振动控制
机械传动系统中的强迫振动控制一、引言机械传动系统是工业生产中常见的一种设备,广泛应用于各个领域。
然而,在机械传动系统的运行过程中,往往会出现振动问题,这不仅会影响设备的正常运行,还会加速设备的磨损,减短设备的使用寿命。
因此,对于机械传动系统中的强迫振动进行控制是至关重要的。
二、机械传动系统中的强迫振动原因强迫振动是指机械传动系统在受到外界激励作用下而产生的一种不稳定振动现象。
在机械传动过程中,强迫振动主要有以下几个原因:1.不平衡质量:传动系统中的某些部件存在质量不平衡的情况,当这些部件旋转时,就会产生一定的离心力,从而引起系统的振动。
2.齿轮啮合:在齿轮传动中,由于齿轮的精度、配合间隙等问题,会导致齿轮啮合时产生振动和噪声。
3.轴承故障:轴承是机械传动系统中重要的部件之一,当轴承出现故障时,会引起系统的不稳定振动。
三、机械传动系统中强迫振动的危害强迫振动对机械传动系统产生的危害主要表现在以下几个方面:1.降低传动效率:强迫振动会使机械传动系统受到外界激励,振动能量会损耗部分机械能,从而导致传动效率降低。
2.增加噪声:强迫振动会引起机械传动系统的噪声,给周围环境和使用者带来不适。
3.加剧磨损:振动会增加机械传动系统内各部件之间的相对运动,从而加剧部件的磨损和疲劳。
四、强迫振动控制方法为了控制机械传动系统中的强迫振动,可以采取以下几种控制方法:1.通过改变结构来控制振动:对于槽型齿轮传动等结构,可以通过改变传动结构,选择更好的齿轮精度、增加配合间隙等方法来控制振动。
2.使用减振装置:通过在传动系统中引入减振装置,如减振器、减振器、减震垫等,可以有效地抑制振动传递,减少传动系统的振动。
3.精确平衡:对于不平衡质量引起的振动问题,可以采取平衡校正的方法,通过调整和平衡不平衡质量,降低振动的发生。
4.提高轴承精度:对于由于轴承故障引起的振动问题,可以通过提高轴承的装配精度,选择合适的轴承材料和润滑方式,来降低系统的振动。
内燃机缸套—机体振动传递特性的试验研究

Ex e i n a s a e n Vi r t n Tr n mit gCh r ce itc p rme t lRe e r h o b a i a s ti : a trsis o n a
o n r— lc s m b y o n e n lCo b sin En i fLi e —b o k As e l fI tr a m u to g ne
a n s  ̄c esaeo h n iebo ksma vn o lo e sb n l n ba n g a 。 srae Thste g o en Nn tt ftee gn rc i mo i ofp nnt ya ay g n g l rt n l ni u fc i h — 娼
机身表面 的振动 是 内部 各种激 励力共 同作 用 的 出 Y() 应多个输 入墨 () t对 £有如下 关系 : 综合反映, 一般来讲 , 主要激励源有 : 气体压力; 活塞 () , :三三 , ・ J ) . )() H () H( ‘ ( 1 , , 横 向撞击 脉冲 ; 体 压力 和活 塞往 复惯 性 力 通过 连 气 式中: 、_ 为响应 Y() 自谱; s( ) 厂 t的 S ( ) , 为输 杆、 曲柄而产生 的周期性激励, 以及轴系本身由于各 之间的互谱 ; ( ) H , 为对应于 的系统 种原 因而产生 的周期性 激 励 : 门机 构运动 冲击 ; 气 其 入 与 , , 为对 应 于 ∞ 的系统 传递 函数 ; H 它机 构激励及若 干随机 激励 。 而活塞对缸套 的横 向 传 递 函数 ; ( ) r为 r的共 撞击l 巩身振动的影响最为显 著, 它使机身在其 固 ( ) 一 ( ) 轭。 有频 率附近 的频带 上振 动 , 且 它 的变 化带 来振 动 并 当 3 与z 之间两两不相关时 , 2 , 有 特性 的明显变 化。活 塞对缸 套 的撞 击是机身 振动 的 ( )= , 1 ( )l ( ) 日 , , () 2 主要激励源, 尽管各种激励混杂在一起, 但这并不影 为了使问题简化而不失一般性 , 对缸套 一 机体 响识 别机 身对活塞撞击 激 励的 响应 J 。 作 以下假 设 : a 缸套 一机体是一个线性时不变系统 ; . 1 基 本原 理 b 各种激励 力之 间线 性无 关 。 . 于是可将缸套 一机体简化为一个多输入、 单输 由于内燃机运动件多且十分复杂, 工作时引起 出的线 性 系统 模 型 , 机体振 动的响应可 写成 : 振动 的激励 源很多 , 对于 不同部位 的振动 , 这些 激励 S() lS() l slS - +1 lS() f =l , + s() p- + r H 厂 厂 源各 自的贡献是不 同 的。 了解这 些激励 力在 内燃 机 1 lS() JI () N f qf +1 z - +S () H 厂 () 3 不同部位的传递路径及其对振动的影响 , 分析不同 式中 : l H 为本缸活塞撞击的传递 函数; .1 S( ) r 路径 的传递 函数 , 利用 内燃机 表 面振 动信 号分 析 是 为本缸活 塞撞击激 励 自谱 ; 激励源 , 判别其故 障 的基 础工作 为邻缸活塞撞击的传递 函数; s( ) S f 为邻 r 由谱分析理论知 , 对于一个线性系统, 假设其输
螺旋环阻尼器在航空发动机锥齿轮减振中的应用
2023年第47卷第12期Journal of Mechanical Transmission螺旋环阻尼器在航空发动机锥齿轮减振中的应用王艳丰郜伟强徐勇强欧代松(中国航空发动机集团有限公司四川燃气涡轮研究院,四川成都610500)摘要针对某型航空发动机中央传动从动锥齿轮振动应力超出齿轮许用应力的问题,介绍了一种应用于锥齿轮的螺旋环摩擦阻尼器。
在齿轮轮缘内侧开一个凹槽,将螺旋阻尼环旋入凹槽中;工作时,齿轮轮缘和螺旋阻尼环因周向变形不协调而产生相互摩擦,从而消耗振动能量。
将这种阻尼器应用于某型航空发动机锥齿轮减振方案中,试验结果表明,螺旋环阻尼器能够有效降低锥齿轮的振动应力水平;阻尼器安装前后该型锥齿轮的4节径1阶后行波共振应力降幅比高达70.7%,3节径1阶前行波共振应力降幅比为53.4%,减振后的齿轮振动应力水平低于齿轮的许用应力。
此外,该型阻尼器还具有安装拆卸方便、附加不平衡量小等优点,在航空发动机齿轮减振中具有广阔的应用前景。
关键词锥齿轮螺旋环阻尼器摩擦阻尼减振振动应力Application of Spiral Ring Dampers in Vibration Reduction of Aeroengine Bevel GearsWang Yanfeng Gao Weiqiang Xu Yongqiang Ou Daisong(AECC Sichuan Gas Turbine Establishment, Chengdu 610500, China)Abstract In view of the problem that the vibration stress of the axle driven bevel gear of an aeroengine exceeds the permissible stress, a spiral ring friction damper is designed for the bevel gear. In detail, a concave groove is fabricated on the inside rim of gear wheels, in which the designed spiral damping ring is embedded. The circumferential deformation of the spiral damping ring is inconsistent with the gear rim under working conditions; thus the mutual friction is induced and the vibration energy could be consumed. The designed spiral damper is applied to the vibration reduction scheme of an aeroengine bevel gear. The test results show that the spiral damping ring can effectively reduce the vibration stress level of the bevel gear.The vibration reduction efficiency of the first-order, 4-pitch diameter backward traveling wave resonant vibration is about 70.7%, and that of the first-order, 3-pitch diameter forward traveling wave resonant vibration is about 53.4%. Then the vibration stress level of the gear after vibration reduction satisfies the allowable stress. Moreover, the spiral damper enjoys convenience in installation and disassembly, and possesses small additional imbalance, which leads to a promising and broad application for vibration reduction of aeroengine gears.Key words Bevel gear Spiral ring damper Friction damping Vibration reduction Vibration stress0 引言航空发动机传动系统锥齿轮是发动机设计关键件,为发动机各油泵及飞机系统输出必要的传动功率,维持发动机及飞机的正常运转。
机械振动基础实验指导书.
机械振动基础实验实验指导书湖南工程学院机械工程学院2010.3目录振动教学实验系统组成及基本测试仪器的使用 (2)实验一用“双踪示波比较法”测量简谐振动的频率 (11)一、实验目的 (11)二、实验仪器及安装示意图 (11)三、实验原理 (11)四、实验方法及步骤 (12)五、实验结果与分析 (13)实验二简谐振动的振幅的测量 (14)一、实验目的 (14)二、实验仪器及安装示意图 (14)三、实验原理 (14)四、实验方法及步骤 (15)五、实验结果与分析 (15)实验三机械振动系统固有频率测量 (16)一、实验目的 (16)二、实验仪器及安装示意图 (16)三、实验原理 (16)四、实验方法及步骤 (19)五、实验结果与分析 (19)实验四单自由度系统有阻尼受迫振动 (20)一、实验目的 (20)二、实验仪器及安装示意图 (20)三、实验原理 (20)四、实验方法及步骤 (22)五、实验结果与分析 (22)振动教学实验系统组成及基本测试仪器的使用INV1601型振动教学实验系统是一套集成化的振动测试实验系统,主要由三部分组成:1、INV1601T型振动教学实验台(以下简称INV1601T实验台)2、INV1601B型振动教学实验仪(以下简称INV1601B实验仪)及各种传感器3、INV1601型DASP振动教学实验软件(以下简称INV1601型DASP软件)INV1601型振动教学实验系统方框图如下所示:1.INV1601T型振动教学实验台该振动教学实验台主要由弹性体系统、激振系统、隔振系统、阻尼和动力吸振器组成。
弹性体系统包括简支梁、悬臂梁、等强度梁、圆板以及用于组成单自由度、二自由度和多自由度系统模型的质量块和钢丝。
激振系统包括偏心电机激振、接触式激振器、非接触式激振器。
隔振系统采用空气阻尼器进行隔振。
阻尼采用的是油阻尼器。
动力吸振采用的是可拆卸式复式吸振器,同时可以减小四个共振频率。
以下对实验台的一些主要部件作详细说明。
基于振动传递分析的舰船辐射噪声特性研究

舰 船在航 行 过 程 中由 于 主机 、 机 、 旋 桨 的 辅 螺 激励 而 产生不 同程 度 的振 动 , 导致 水 下 辐 射 噪声 ,
基座 结构 , 进行 振 动 传 递特 性 的研 究 , 索 船 体 的 探 振动 与水 下 声 辐 射 特 性 的 变 化 规 律 . 利 用 有 限 在
t a s iso h r c e itc na y i r n m s i n c a a trsi sa l ss
QuY aw n ,WagG oh H uh o i u n ag n uzi, uY ca
( . col f aa A ci c r n ca nier g J ns nvri f cec n eh o g , hni gJ ns 103, hn ) 1Sho vl rht t eadO enE g ei , i guU i syo ineadT cnl y Z ej n i gu2 20 C ia oN eu n n a e t S o a a
e u a e ao g t e s i tu t r s r v ae n n l z d rs r c l n h hp s c u e i e e ld a d a ay e .T e h n e ae os sr d ae r m h oe f r h n t e u d r tr n ie a i td f w o t e wh l
第2 5卷第 2期
2 1 年 4月 01
江苏 科技 大学 学报 ( 自然科 学版 )
Junl f i guU iesyo c neadT cnl y N trl c neE io ) ora o a s nvrt f i c n eh o g ( aua S i c dt n Jn i S e o e i
丝杠进给系统的振动模态耦合分析

FglS rw N t c e ai Darm ._ ce u h m t iga S c
人员 利用具体实验对丝杠扭转振动进行 了研究 。 他们都认为耦
合 系统第一阶模态主要是轴向的, 而第二阶和第三阶主要是转角 的, 但是他们 的研究都是在一些 条件假设 以及 特定 环境 下进行
另 外有 : ’ l ox = ) () ( , @( £ )
=
c uc2 k2 “ 绕 轴 的转动刚度 和阻尼分别为 k 0 C 而丝杠 ,; C1 ; ,
同螺母 的接触部位 .是决定轴 向和扭转运动耦合 的关键部位 , 此 处我们同轴承一样 , 考虑其轴向和扭转 的刚度与阻尼外 , 我们引 人了l 台的振动位移 u()设丝杠在 轴方 向的轴向位移为 u T作 。 f ( t, , 而绕 轴的转角位移为 Oxto ) (,
m hn os dl f u d t nt aheehg e om c o t 1 c a iet l a ya o n ai c i ih r r a e nr . o n a o o v p f n c o
Ke or : i eSy t m ; l c e ; up e o i n; br to Fr que y yW ds Dr v se Ba lS r w Co l d M to Vi a i n e nc
【 摘
要】 随着现代机床高速高加速化发展 , 对进给 系统提 出了更高的要求。为研究丝杠进给 系统
的振 动模 态 , 用拉 格 朗 日方程 建 立 了考虑 丝杠轴 向和转 角运动耦 合 的 系统运 动方程 , 利 用里兹 级 利 并 数 展 开对其各 阶模 态在不 同丝杠 导程 下耦 合特 性进行 分析 , 同时分析 了工作 台位 置和 负载质 量 变化 对
发动机缸盖螺栓拧紧力矩对机体振动的影响

上, 计算 l 5帧最大振幅值( 或均方根值 ) 的均值 , 以此 开始 ,采取螺栓拧紧力矩每增加 5N・ 就测取一组 r n 数据 , 直至上限 20N m。 9 ・ 测试过程 中, 将发动机设置 作 为缸 盖 螺 栓 在该 拧 紧力 矩 下 的机 体 振 动 量 。
在数据读取 与分析程序设计 中 ,共采用 了两个 3种转速 , 7 0 /i、 0 0r i、 2 0 mn 分别 即 8 mn 1 8 mn 1 0 i, r / d Fr op循 环 结 构 、两 个 移 位 寄 存 器 以及 S nl 采集发动机在不 同转速下 不同测点 的振动量 ,为数 o o L ia g A a s 下的 S tt s V 。 n yi l s tii 子 I数据读取与分析模块 的 a sc 据分析与拟合程序提供原始数据。
4.6 84
10 6
T
Ⅱ
T Ⅱ
O.l 8 31
21 24 .7 12 54 .1
18 78 . l
12 7 1 .1 O7 .8l 7
24 56 .2
18 11 .2 10 6 1 _6
b
1 Ⅱ
0。2 4 O4 O2 7 2 .2 02 54 .3 0198 .2 O2 4 .7
断, 螺栓在某一拧 紧力矩范 围内, 可使发动机 机体振 动 最小 。
图 4 数 据拟合程序流程 图
2 发动机缸 盖振动测试
21 测试 条 件 与 方案 .
() 2 在缸盖螺栓拧 紧力矩一定条件下 , 随着发动 机转速增高 , 机体振动幅度也有不同程度的增大。
() 3 用振 幅最大值 和均方根值 , 作为特征参数分 析机体振动时 , 两者分析的数据变化趋势一致。
主要机械设备一览表
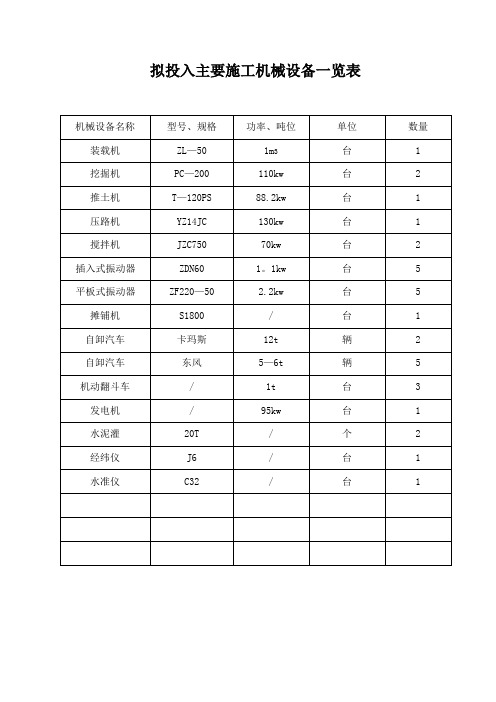
功率、吨位
单位
数量
现代挖掘机
R220Lc-5
0.8m3
台
5
修剪机
CHTZ6010
10KW
台
6
喷灌机
WB20
35KW
台
8
洒水车
东风
2m3
辆
3
自卸车
解放
4.5T
辆
5
草坪机
德宝2.2寸6.0卜口自走
动力6.0HPB&SI/C发动机
台
7
打药机
/
0。75KW
台
9
花剪
/
/
把
10
人字梯
/
/
把
2
五、拟投入本工程的主要施工设备表
序 号
设备 名称
型号规格
数
量
国别 产地
制造
年份
额定功率
(KW)
生产 能力
用于 施工 部位
备 注
1
现代 挖掘 机
R220Lc-5
5
中国
2006
0。8m3
良 好
绿化
2
修剪 机
CHTZ6010
6
中国
2013
10KW
良 好
绿化
3
喷灌 机
WB20
8
中国
2014
35KW
良 好
绿化
4
洒水 车
东风
3
中国
2009
2m3
2年
测量
5
砼回弹仪
HDY—12
4
徐州
2014
1年
砼检测
6
标准筛
BZC-05
压电陶瓷材料在机械振动反馈控制中的应用研究
压电陶瓷材料在机械振动反馈控制中的应用研究摘要:机械振动是工程中常见的一个问题,它不仅会影响设备的性能和寿命,还会给使用者带来不便和危险。
为了有效控制振动,科学家们研究了多种方法,其中一种是利用压电陶瓷材料进行振动反馈控制。
本文将详细介绍压电陶瓷材料在机械振动反馈控制中的应用研究。
1. 引言机械振动是机械系统中常见的现象,它在诸多领域中均有出现,如机械制造、交通运输等。
由于振动会导致设备的损坏和性能下降,因此控制振动具有重要的工程应用价值。
而压电陶瓷材料以其特有的性能在机械振动反馈控制中得到了广泛应用。
2. 压电陶瓷材料的基本原理压电陶瓷材料是一种具有压电效应的材料,它能够在外加电场的作用下发生形变,而在外力作用下也会产生电荷。
这种双向转换的性质使得压电陶瓷材料在机械振动控制中具有潜在的应用价值。
3. 压电陶瓷材料在振动控制中的作用机制压电陶瓷材料在振动控制中主要通过两种方式发挥作用:一是作为能量转换器将机械振动能量转换为电能,二是作为振动传感器将机械振动信号转换为电信号。
4. 压电陶瓷材料的应用案例4.1 振动控制器件压电陶瓷材料可以作为振动控制器件,通过对控制器件施加电压,改变其几何形状,从而改变机械系统的特性,达到降低振动幅值的效果。
例如,在飞机结构的振动控制中,可以利用压电陶瓷材料作为控制器件,通过对其施加电压来抵消飞机振动带来的不利影响。
4.2 振动传感器压电陶瓷材料还可以作为传感器,通过测量机械系统的振动信号来实现反馈控制。
例如,在建筑结构的振动监测中,可以利用压电陶瓷材料作为传感器,通过测量结构的振动信号,及时监测和控制结构的振动状况,保证结构的安全性。
5. 压电陶瓷材料在机械振动控制中的优势和局限性5.1 优势压电陶瓷材料具有体积小、重量轻、快速响应等优势,使得其在机械振动控制中具备了广泛的应用前景。
此外,压电陶瓷材料的工作温度范围广,可以适应各种环境条件。
5.2 局限性压电陶瓷材料在应用过程中也存在一些局限性。
旋转机械系统动力学及故障诊断

旋转机械系统动力学及故障诊断引言旋转机械在现代工业生产中扮演着重要的角色,涵盖了许多领域,包括能源、交通、制造等。
然而,由于长期运行和频繁的工作条件,旋转机械系统可能会面临动力学问题和潜在的故障。
因此,理解旋转机械系统的动力学行为以及如何进行故障诊断变得至关重要。
旋转机械系统动力学旋转机械系统的动力学研究是理解其运行行为的基础。
动力学主要研究系统在给定载荷和运行条件下的运动和行为。
旋转机械系统的动力学包括自由振动和受迫振动两种类型。
自由振动是指旋转机械系统在没有外部激励的情况下的振动行为。
自由振动的频率和振幅由系统的质量、刚度和阻尼特性决定。
在自由振动中,系统会以特定的固有频率进行振动,这可以通过数学模型进行预测和计算。
受迫振动则是指旋转机械系统受到外部激励而发生的振动。
外部激励可以来自多个方面,包括不平衡质量、轴向力、径向力等。
受迫振动的频率由外部激励频率决定,并且可能会引起系统共振,导致严重的机械故障。
旋转机械系统的故障诊断故障诊断是指通过对旋转机械系统动力学行为的分析和监测,来判断是否存在故障并识别其类型和位置。
故障诊断可以通过多种方法来实现,包括振动分析、声音分析、温度监测等。
振动分析是最常用的故障诊断方法之一。
通过对旋转机械系统振动信号的采集和分析,可以识别出许多常见的故障类型,如不平衡、轴承故障、齿轮故障等。
振动分析可以通过频谱分析、包络分析等技术来获得故障特征,并与预先建立的故障数据库进行比对,从而确定故障位置和类型。
声音分析是另一种有效的故障诊断方法。
通过对旋转机械系统产生的声音信号进行采集和分析,可以判断是否存在异常噪音,并确定其来源。
例如,轴承故障通常会伴随着明显的噪音变化,这可以通过声音分析来检测和诊断。
除了振动和声音分析外,温度监测也是一种常用的故障诊断方法。
旋转机械系统在工作时会产生热量,因此监测系统不同部位的温度变化可以帮助发现故障。
例如,轴承过热可能是轴承故障的指示,而传动系统异常温度升高可能与齿轮故障有关。
机械振动实验指导书
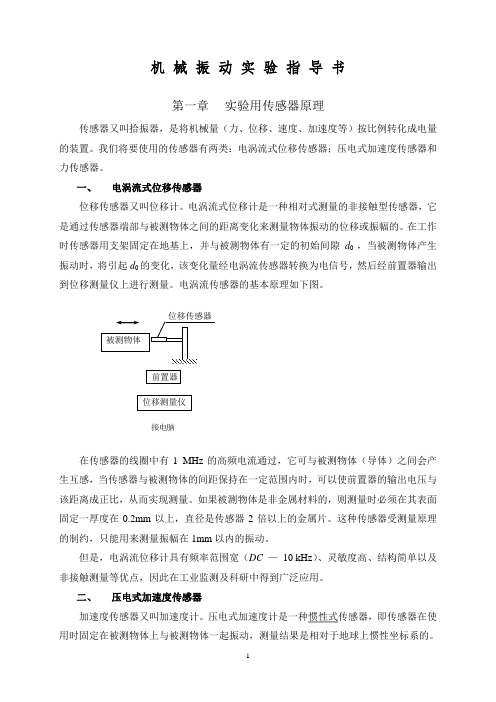
机 械 振 动 实 验 指 导 书第一章 实验用传感器原理传感器又叫拾振器,是将机械量(力、位移、速度、加速度等)按比例转化成电量的装置。
我们将要使用的传感器有两类:电涡流式位移传感器;压电式加速度传感器和力传感器。
一、电涡流式位移传感器位移传感器又叫位移计。
电涡流式位移计是一种相对式测量的非接触型传感器,它是通过传感器端部与被测物体之间的距离变化来测量物体振动的位移或振幅的。
在工作时传感器用支架固定在地基上,并与被测物体有一定的初始间隙d 0 ,当被测物体产生振动时,将引起d 0的变化,该变化量经电涡流传感器转换为电信号,然后经前置器输出到位移测量仪上进行测量。
电涡流传感器的基本原理如下图。
在传感器的线圈中有1 MHz 的高频电流通过,它可与被测物体(导体)之间会产生互感,当传感器与被测物体的间距保持在一定范围内时,可以使前置器的输出电压与该距离成正比,从而实现测量。
如果被测物体是非金属材料的,则测量时必须在其表面固定一厚度在0.2mm 以上,直径是传感器2倍以上的金属片。
这种传感器受测量原理的制约,只能用来测量振幅在1mm 以内的振动。
但是,电涡流位移计具有频率范围宽(DC — 10 kHz )、灵敏度高、结构简单以及非接触测量等优点,因此在工业监测及科研中得到广泛应用。
二、压电式加速度传感器加速度传感器又叫加速度计。
压电式加速度计是一种惯性式传感器,即传感器在使被测物体位移测量仪前置器 接电脑用时固定在被测物体上与被测物体一起振动,测量结果是相对于地球上惯性坐标系的。
惯性式传感器的基本原理在机械振动的教材中已有介绍。
当ω/ωn<<1时,传感器内的质量块相对于其外壳的相对位移正比于被测物体的加速度幅值,因而传感器构成加速度计。
为了扩大加速度计的使用频率上限,应当尽可能提高加速度计本身的固有频率,一般压电式加速度计的固有频率可在20 kHz以上。
压电式加速度计利用压电晶体的压电效应来实现信号转换。
故障诊断的参考标准

故障诊断的参考标准为了获得最佳的诊断效果,在机械设施诊断的过程中应当建立设施的故障报警门限参考标准,现将国际上通用的标准列出如下:1、 IS02372常用机械设施的IS02372振动标准在国际标准IS02372中规定了转速为10—200r∕s的机器在10—1000Hz的频率范围内机械振动猛烈度的范围,它将振动速度有效值从0∙ll∏ιπι∕s(人体刚有振动的感觉)到71mm∕s的范围内分为15个量级,相邻两个烈度量级的比约为1: 1.6,即相差4dB。
这是由于对于大多数机器的振动来说4dB之差意味着振动响应有了较大的变化。
有了振动烈度量级的划分就可以用它表示机器的运行质量。
为了便于有用,将机器运行质量分成四个等级:A级一一机械设施正常运转时的振级,此时称机器的运行状态“良好”。
B级一一已超过正常运转时的振级,但对机器的工作量尚无显著的影响,此种运行状态是“容许”的。
C级一一机器的振动已经到了相当猛烈的强度,导致机器只能牵强维持工作,此时机器的运行状态称为“可容忍”的。
D级一一机器的振动能已达到使机器不能运转工作,此种机器的振级是不允许的。
明显,不同的机械设施由于工作要求、结构特点、动力特性、功率容量、尺寸大小以及安装条件等方面的区分,其对应于各等级运行状态的振动烈度范围必定是各不相同的。
所以对各种机械设施是不能用同一标准来衡量的,但也不行能对每种机械设施特地制定一个标准。
为了便于有用,IS02372将常用的机械设施分为六大类,令每一类的机械设施用同一标准来衡量其运行质量。
机械设施分类状况如下[14]:第一类:在其正常工作条件下与整机连接成整体的发动机和机器的零件(如15kw以下的发动机)。
其次类:设有专用基础的中等尺寸的机器(如15—75kw的发电机)及刚性固定在专用基础上的发动机和机器(300kw以下)。
第三类:安装在测振方向上相对较硬的、刚性的和重的基础上的具有旋转质量的大型原动机和其它大型机器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
k 令: m
2
简谐运动的微分方程:
d2 x 2 x0 2 dt
微分方程的解(运动方程):
x A cos(t )
简谐运动: 物理量随时间的变化规律满足简谐运动的微 分方程,或遵从余弦规律,则广义地说,这一物理量在做 简谐运动. dx 简谐运动的速度与加速度: v A sin( t ) dt π vm cos( t ) 2
第 五 章 机械振动
机械振动
第 5 章 机械振动
振动(vibration): 描述物质运动状态物理量(物体的位置、电流强度、电场 强度、磁场强度等),在某一数值附近做周期性的变化. 机械振动(mechanical vibration): 物体在一定位置附近所做的周期性往复运动. 简谐运动(simple harmonic motion) : 是最基本、最简单的振动. 复杂振动 = 简谐运动 研究目的 —— 利用、减弱 或 消除
旋转矢量 旋转一周,P点完成一次全振动 结论:投影点的运动为简谐运动
第12页 共41页
x A cos( t )
机械振动
5.2.2 旋转矢量图的应用 1.求初相位
向x 轴正向运动
x
向x 轴负向运动
x
2.比较各振动之间的相位关系
x1 A1 cos(1t 1 )
x2 A2 cos(2 t 2 )
1 2π 2π T 角频率或圆频率(angular frequency) :2 秒内振动次数
单位: 秒-1 (s-1) 振动微分方程建立过程中得
k 由振动系统条件决定 m
又称固有圆频率、固有频率、固有周期
第8页 共41页
机械振动
2. 描述物体振动强弱的物理量 振幅 A(amplitude): 物体简谐运动中所能达到的最大 位移的绝对值 单位: 米(m) 3. 相位、初相和相位差 相位 (phase) : 或周相ωt+ 描述质点在t时刻振动状态的物理量 单位: 弧度(rad) 初相 : 描述质点在零时刻振动状态的物理量 t=0时的相位,与初始条件有关 若有两个谐振动: x1 A1 cos(1t 1 )
A
A
相位差 (2t 2 ) (1t 1 )
第4页 共41页
机械振动
5.1 简谐运动
5.1.1 简谐运动的特征及其运动方程 弹簧振子——理想模型
简谐运动的基本依据
f kx
——始终指向平衡位置 简谐运动的动力学特征
单 摆
d2 x F m 2 k x dt
第5页 共41页
机械振动
d2 x 简谐运动动力学特征: F m 2 k x dt
第11页 共41页
机械振动
5.2 简谐运动的旋转矢量表示法
5.2.1 旋转矢量表示法
旋转矢量 A的长度即为简谐运动
的振幅
旋转矢量 A 的角速度即为振动
t
x
的角频率 旋转矢量 与x轴的夹角( t+) 为简谐运动的相位 t
A
A
P
=0时, A 与x轴的夹角即为简谐运动的初相位
解:(1) x0 0.04m, v0 0, 6.0s 1
振幅: A x0
2
v0
2 2
0
v0 0 x0 0.04m arctan x0
得: x 0.04 cos 6.0t (m)
(为什么不取π ?)
1 cos 6.0t 2
(2) 由(1)中结果 0.02 0.04 cos 6.0t 3 dx 2 v 0.24 sin 6.0t sin 6.0t 1 cos 6.0t 2 dt 3 依题意,v<0 v 0.24 0.208 (m s 1 ) 2
单位: 秒(s)
第7页 共41页
机械振动
x A cos( t ) A cos( t 2 )
2 A cos (t ) )
单位: 赫兹(Hz) (s-1)
T
2
频率 (frequency) : 单位时间内所完成的振动次数
第9页 共41页
x2 A2 cos(2 t 2 )
机械振动
相位差 Δ (phase difference) : (2t 2 ) (1t 1 ) 频率相同时,相位差为: 2 1 4. 振幅和初相位的求法 设 t =0 时
x0 A cos , v0 A sin
第6页 共41页
机械振动
简谐运动的速度与加速度:
dx v A sin( t ) dt π vm cos( t ) 2 dv a 2 A cos( t ) dt
am cos( t π )
5.1.2 简谐运动方程中的三个基本物理量 1.描述振动快慢的物理量 周期 T (period) : 完成一次完整振动所需要的时间
《新编基础物理学》第二版
第二篇 机械振动 机械波
第 2 篇 机械振动 机械波
机械振动: 物体在一定的位置附近作来回往复的运动。 振动:任何一个物理量在某个确定的数值附近作周期 性的变化。 1、 物体的来回往复 运动(弹簧振子、 单摆等) 2、电流、电压的周 期性变化 波动:振动状态在空间的传播。
第2页 共41页2Fra bibliotekv x02 02 A2 (sin 2 cos 2 ) A2
v0 2 振幅: A x0
2
v0 ) 初相位: arctan( x0
不是唯一的,与速度方向有关,需要具体分析.
第10页 共41页
机械振动
例 1-1 一轻弹簧的一端固定,另一端连接一定质量的物体 . 整个系统位于水平面内,系统的角频率为6.0s-1.今将物体沿 平面向右拉长到 x0=0.04m处释放,试求: (1)简谐运动表达 式;(2)物体从初始位置运动到第一次经过A/2处时的速度.