B1_U1_B
b1m8u1教案

新标准英语第一册M8U1Is it a dog?教案吴广凌教学目标:让学生三会掌握单词look /fox /kite让大部分学生掌握Is it a…?句型来询问,并且会肯定回答Yes, it is. No, it isn’t.教学重点:单词look /fox /kiteIs it a…?询问,肯否定回答Yes, it is. No, it isn’t.教学难点:No, it isn’t. 孩子回答说的时候可能愿意说No, it is.或者愿意说Yes, it isn’t.教学准备:单词卡片、CAI课件、CD_ROM、玩偶I Preparation1.Greeting.2.Sing a song.1,2,3,4,5…Stand Up.3.Point and ask.T: What’s that? S: It’s a window.T: What’s that? S: It’s a door.Look at here.Read words together. school bag/ ruler/pencil/pen It’s a…II PresentationT: Is it book?S: Yes/No book——lookT: Is it a dog? S: Yes/No大明和Sam去了公园,他们看到了一样奇怪的东西,到底是什么?咱们一起来听一听。
1. Listen to the tape.T: What’s that? S: It’s a kite. 出示kite图片,学习单词kite.一开始大明和Sam不知道怎么回事,他们是怎么猜的呢?今天我们一起来学习用Is it …?句型来问一问。
2. Listen to the tape again.Is it a dog? No, it isn’t. (一组问一组回答)Is it a fox? No, it isn’t. fox ——box(一人读一个单词最后一起读句子)Is it a monster? Yes, it is. 多个monster图片(一边传递其他人一边传递一起问,最后一个人回答)PPT快速闪过图片,老师问Is it a ...?同学们用Yes, it is. 或者No, it isn’t.回答。
B1 U1 Reading&Language points

9.She and her family hid away….
hide--- hid--- hidden <1>vi 躲藏 eg: The thief hid away in a friend`s house for several weeks after the robbery. 那个盗贼行窃后在朋友家躲藏了几个星期。
I’ve grown so crazy about everything…
a )为……狂热的,痴迷的 grow/be crazy about sb/sth. eg: The boys are crazy about the girl singer. b) 疯狂的,癫狂的,可作定语和表语. It is crazy of sb to do sth = sb be crazy to do sth eg: It`s crazy of you to buy the car at such a high price = You are crazy to buy the car at such a high price.
2) to join numbers, amount, etc so as to find the total eg. Add up these figure for me, please.
add up 把……加起来,合计
add sth. to sth. 把…… 加到 / 进 ……
add to (=increase) 增加了……
4. calm down 镇静,安静,平静 Look, calm down! We will find her. 喂,镇静一点,我们会找到她的。 We waited inside until things calmed down. 我们待在室内,直到一切都恢复了平静。
全新版大学进阶英语综合B1-U1-keys to exercises(练习答案)
综合U1 keys to exercises:使用说明:同学们不要做练习时直接看这答案,而是在自己把练习做一遍之后利用这答案来核对:检查自己做的是否正确,哪些做对了,哪些做错了,还有那些没做出来的答案是什么。
I. Understanding the text2. Comprehension Check2.1 Focusing on the main ideasDJ, hearing, deaf, musical , 18, tutoring, sympathy, dreams2.3 Understanding difficult sentences1A, 2B, 3B, 4A, 5BII. Focusing on Language in Context1. Key words and Expressions1.11creativity, 2. doing well, 3sympathy, 4 challenge, 5.over time, 6 insurance, 7. came to life, 8 by now, 9 predict, 10. all the way, 11 infection, 12 software 13 corporate 14, screen 15, frequency1.21.big on2. all the way3. motivation4. predicting5. hooked,6.pursuit of7. elementary8. folk9. taken over1.31 didn’t show up2 tutor their kids/children themselves ,3 believe in yourself 4. chasing our dreams 5 have no motivation2. Word Formation1. When you email me,2.Sea level rise can increase….3. ….that it has yellowed4. … so he bicycles to school5 G reen means ….3. Sentence Patterns.1. Why not make a plan ?2. How about looking for other opportunity ?3. Why not take a part-time job4. How about starting one5. why not take a more active part in4. Comprehensive Practice1. B am big on , challenges, motivation2. B. believe in yourself/ your dream, pursuit of your dream, over time3. a corporate , creativity, hooked on4. B. Why not, take over, all the way, do wellReading 1Comprehension check for Reading 11. T2. F3. T4. F5. F6. T7. T 8 F 9 T 10 T。
新视野英语教程读写教程B1-U1-SB

Vocabulary study
5. confused adj. mixed up in one's mind 迷惑的;糊涂的 [例] He gets confused easily. 他很容易被搞糊涂。 [例] Jane felt confused about love and marriage. 琼对恋爱和婚姻感到很迷惑。
国际交流英语视听说B1U1--参考答案
Unit 1
Living for Work
urther Listening
Further Listening
Listening 1
A | Read the statements and answer choices. Then listen to a talk about Tim Samaras and choose the correct word or phrase to complete each statement.
Further Listening
Listening 2
Answer Keys 1. T 2. F (Students here don’t have to take both subjects. They can
take one or the other and still graduate.) 3. F (I believe they do respect me.)
shot he wants.
a. Few
b. Some
c. Many
5. Samaras _c_____ what it looks and feels like inside a tornado.
a. keeps trying to record b. failed to record c. succeeded in recording
3. Taking a photograph of the moment lightning starts is ___a___.
a. very difficult b. not so hard c. very easy
Further Listening
U1 B1

Exercises 一、选词填空
bandage press sick knee nosebleed run tell
1 Tom’s _k_n__ee__ is bleeding. He should __ru__n__ it under the water, then put a __b_a_n_d_a_g_e_ on it.
Problems
Treatments
Problems
Treatments
Someone felt sick. √ b, c
Someone had a nosebleed. √
Someone cut his knee. √
Someone hurt his back.
Someone had a fever.
Someone got hit on the head. √
Presenting 1c Listen again. Write the letter of each treatment next
to the problems you check in the chart above.
a. put a bandage on it 用绷带包扎一下。 b. took his temperature 给他量体温。 c. told him to rest 叫他要休息。 d. put some medicine on it 在伤口上敷点药。 e. took him to the hospital to get an X-ray 叫他去医院做X光检查。 f. told her to put her head down 告诉她把头低下。
Someone got hit on the head. √
1. Someone felt sick. (教材P5 1b) Point sick adj. 生病的;有病的 sick作形容词, 意为“生病的;有病的”。sick leave意为“病假”。 ➢ If you are unhappy, you’ll easily get sick. ➢ She asked for sick leave because she had a bad cold.
附录B–CANopen错误代码
附录 B – CANopen 错误代码 本附录给出了各种 ABB 变频器的交叉参考表。
这些表中包含 CANopen 错误寄存器位号、错误代码和含义、以及相应的变频器错误代码和/或消息。
如果变频器在二进制字(故障字)中表明存在一个故障,那么在“附加信息”栏内会给出字的名称以及相应的位号。
请注意在面板中给出的一些错误消息不会出现在二进制故障字中,反之亦然。
在变频器手册中给出了每种错误的原因和纠正方法。
附录 B – CANopen 错误代码ACS 400CANopen 错误变频器故障寄存器位代码含义名称附加信息b01000一般错误HW 错误:偶发故障中断故障字2, b13 b12310连续过电流过电流故障字1, b0输出过载故障字1, b4 b12320短路/接地泄漏故障电流故障字1, b3 b12330接地泄漏输出接地故障故障字, b15 b23110电网电源过压直流过压故障字1, b1 b23130断相直流总线纹波过大故障字1, b11 b23220直流回路欠压直流欠压故障字1, b5 b34210温度过高的设备ACS 400温度过高故障字1, b2 b34310温度过高的变频器电机温度过高故障字1, b8b55210测量电路HW 错误:较差的模拟输入;无效脉冲计数故障字2, b11b55300操作设备面板缺失故障字1, b9 b55530EEPROM HW 错误:较差的或新的 FPROM故障字2, b8HW 错误:检测到新 FPROM故障字2, b9HW 错误:FPROM 下装不成功故障字2, b10 b56320参数错误参数不一致故障字1, b10 b57121电机过载停止电机堵转故障字1, b12 b57510串行接口1DDCS 回路故障字2, b2 b57520串行接口2串行通讯缺失故障字1, b13 b58110进程数据监控模拟输入1故障故障字1, b6模拟输入2故障故障字1, b7 b59000外部错误外部故障故障字1, b14 b7FF55变频器专用HW 错误:调制器堵转故障字2, b15 b7FF57变频器专用类型代码错误故障字2, b12 b7FF5D变频器专用应用故障故障字2, b1 b7FF5E变频器专用HW错误:SW 断言过期故障字2, b14 b7FF6A变频器专用欠载故障字2, b0附录 B – CANopen 错误代码ACS 600 - 标准应用程序v5.x ACS 800 - 标准应用程序ASXR7xxxCANopen错误变频器故障寄存器位代码含义名称附加信息b01000一般错误保留系统故障字, b15b12120接地故障EARTH FAULT故障字1, b4b12310连续过流OVERCURRENT故障字1, b1b12340短路SHORT CIRC故障字1, b0SC(INU1)故障字1, b12SC(INU2)故障字1, b13SC(INU3)故障字1, b14SC(INU4)故障字1, b15b23130电源缺相SUPPLY PHASE故障字2, b0b23210直流回路过压DC OVERVOLT故障字1, b2b23220直流回路欠压DC UNDERVOLT故障字2, b2b34100环境温度AMBIENT TEMP故障字2, b7b34210温度过高的设备ACS 600 TEMP故障字1, b3b34310温度过高的变频器THERMISTOR故障字1, b5MOTOR TEMP故障字1, b6b55210测量电路PPCC LINK故障字2, b11b55300操作设备PANEL LOSS故障字2, b13b55530EEPROM FLT(F1_4)系统故障字, b2FLT(F1_5)系统故障字, b3b56100内部软件错误由系统故障字指定检查系统故障字b56200用户软件USER MACRO系统故障字, b1b57000附加模块I/O COMM故障字2, b6b57121电机堵转MOTOR STALL故障字2, b14b57123电机超频OVERFREQ故障字1, b9b57305增量编码器1故障ENCODER FLT故障字2, b5b57510串行接口1COMM MODULE故障字2, b12b57520串行接口2CH2 COM LOSS故障字1, b11b58110进程数据监控AI < MIN FUNC故障字2, b10b59000外部错误EXTERNAL FLT故障字2, b8b7FF51设备专用 (1)LINE CONV故障字1, b10b7FF52设备专用 (2)NO MOT DATA故障字2, b1b7FF53设备专用 (3)CABLE TEMP故障字2, b3b7FF54设备专用 (4)RUN DISABLED故障字2, b4b7FF55设备专用 (5)OVER SWFREQ故障字2, b9附录 B – CANopen 错误代码CANopen错误变频器故障寄存器位代码含义名称附加信息b7FF56设备专用 (6)MOTOR PHASE故障字2, b15b7FF57设备专用 (7)FLT (F1_7)系统故障字, b0b7FF58设备专用 (8)FLT (F2_12)系统故障字, b4b7FF59设备专用 (9)FLT (F2_13)系统故障字, b5b7FF5A设备专用 (10)FLT (F2_14)系统故障字, b6b7FF5B设备专用(11)FLT (F2_15)系统故障字, b7b7FF5C设备专用 (12)FLT (F2_16)系统故障字, b8b7FF5D设备专用 (13)FLT (F2_17)系统故障字, b9b7FF5E设备专用 (14)FLT (F2_18)系统故障字, b10b7FF5F设备专用 (15)FLT (F2_19)系统故障字, b11b7FF60设备专用 (16)FLT (F2_3)系统故障字, b12b7FF61设备专用 (17)FLT (F2_1)系统故障字, b13b7FF62设备专用 (18)FLT (F2_0)系统故障字, b14b7FF6A设备专用 (25)UNDERLOAD故障字1, b8附录 B – CANopen 错误代码ACS 600 - 标准应用程序v2.8/3.0CANopen 错误变频器故障寄存器位代码含义名称b12120接地故障EARTH FAULTb12310连续过电流OVERCURRENTb12340短路SHORT CIRCb23130端相SUPPLY PHASEb23210直流回路过压DC OVERVOLTb23220直流回路欠压DC UNDERVOLTb34100环境温度AMBIENT TEMPb34210温度过高的设备ACS 600 TEMPTHERMISTORb34310温度过高的变频器MOTOR TEMPb55300操作设备PANEL LOSSb56200用户软件USER MACROb57000附加模块I/O COMMb57121电机堵转MOTOR STALLb27123电机超频OVERFREQb57305增量编码器1故障ENCODER ERRb57510串行接口1COMM MODULEb58110进程数据监控AI < MIN FUNCb59000外部错误EXTERNAL FLTb7FF51设备专用 (1)LINE CONVb7FF52设备专用 (2)NO MOT DATAb7FF54设备专用 (4)RUN DISABLEDb7FF56设备专用 (6)MOTOR PHASEb7FF63设备专用 (19)ID RUN FAILb7FF64设备专用 (20)WRITE PROTCTb7FF65设备专用 (21)ID RUN SELb7FF66设备专用 (22)PARAM LOCKb7FF67设备专用 (23)MOTOR STARTSb7FF68设备专用 (24)ID N CHANGEDb7FF69设备专用 (25)MACRO CHANGEb7FF6A设备专用 (26)UNDERLOAD附录 B – CANopen 错误代码ACS 600 – 运动控制应用程序CANopen 错误变频器故障寄存器位代码含义名称附加信息b12120接地故障EARTH FAULT故障字1, b16b12310连续过电流OVERCURRENT故障字2, b6b12340短路SHORT CIRC故障字2, b21b23130电源缺相SUPPLY PHASE故障字1, b3b23210直流回路过压DC OVERVOLT故障字2, b5b23220直流回路欠压DC UNDERVOLT故障字2, b4b34210温度过高的设备ACS 600 TEMP故障字2, b11b34310温度过高的变频器MOTOR TEMP故障字2, b9b55210测量电路PPCC LINK故障字2, b10b56200用户软件USER MACRO故障字1, b6b57000附加模块I/O CONFIG故障字1, b10I/O COMM故障字 1, b19 b57121电机堵转MOTOR STALL故障字2, b20b57123电机超频OVERFREQ故障字2, b23b57305增量编码器1故障ENC COMM ERR故障字1, b13b57320位置POSITION ERR故障字1, b20b57510串行接口1COMM MODULEb7FF52设备专用(2)NO MOT DATA故障字1, b9b7FF56设备专用 (6)MOTOR PHASE故障字2, b22b7FF6A设备专用 (25)UNDERLOAD故障字 2, b2b7FF6B设备专用 (26)ENC SSI ERR故障字1, b11b7FF6C设备专用 (27)SPD ALT ERR故障字1, b14b7FF6D设备专用 (28)SPD DIFF ERR故障字1, b15b7FF6E设备专用 (29)POS LIM ERR故障字1, b21b7FF6F设备专用 (30)OVERSPEED故障字1, b22附录 B – CANopen 错误代码ACS 600–起重机应用程序CANopen 错误变频器故障寄存器位代码含义名称附加信息b12120接地故障EARTH FAULT故障字2, 位.4b12310连续过电流OVERCURRENT故障字2, 位.3b12340短路SHORT CIRCUIT故障字2, 位.11b23130电源缺相SUPPLY PHASE故障字2, 位.13b23210直流回路过压DC OVERVOLT故障字2, 位.1b23220直流回路欠压DC UNDERVOLT故障字2, 位.2b34100环境温度AMBIENT TEMP故障字1, 位.13b34210温度过高的设备ACS 600 TEMP故障字2, 位.7b34310温度过高的变频器THERMISTOR故障字1, 位.14MOTOR TEMP故障字2, 位.8 b55210测量电路PPCC LINK故障字2, 位.12b55300操作设备PANEL LOSS故障字1, 位.11b56200用户软件USER MACRO故障字2, 位.6b57000附加模块I/O COMM故障字1, 位.12b57123电机超频OVERFREQ故障字2, 位.9b57305增量编码器1故障ENCODER ERR故障字2, 位 .14b57310速度(编码器)MOT OVERSP故障字1, 位 .1b57510串行接口1COMM MODULE故障字1, 位.16b57520串行接口 2MF COMM ERR故障字1, 位.10b59000外部错误EXTERNAL FLT故障字1, 位.9b7FF56设备专用MOTOR PHASE故障字2, 位 .5b7FF73设备专用TORQ FLT故障字1, 位 .2b7FF74设备专用BRAKE FLT故障字1, 位 .3b7FF75设备专用TORQ PR FLT故障字1, 位 .5b7FF76设备专用MAS OSC FLT故障字1, 位 .6b7FF77设备专用CHOPPER FLT故障字1, 位 .7b7FF78设备专用INV OVERLO故障字1, 位 .8b7FF79设备专用MF RUN FLT故障字1, 位.15b7FF7A设备专用START INHIBIT故障字2, 位 .10附录 B – CANopen 错误代码ACS 1000DCS 400CANopen 错误变频器故障寄存器位代码含义名称b01000一般错误保留b57510串行接口1COMM MODULECANopen 错误变频器故障寄存器位代码含义代码消息附加信息b122212号连续过电流 F 14ARMATURE OVERCURRENT故障字1, b13 b122221号连续过电流 F 13FIELD OVERCURRENT故障字 1, b12 b23110电网电源过压 F 10MAINS OVERVOLTAGE故障字 1, b9 b23120电网电源欠压 F 1AUX VOLTAGE FAULT故障字1, b0F 9MAINS UNDERVOLTAGE故障字1, b8b23320电枢电路 F 15ARMATURE OVERVOLTAGE故障字1, b14 b34210温度过高的设备 F 7CONVERTER OVERTEMP故障字 1, b6 b34310温度过高的变频器 F 8MOTOR OVERTEMP故障字1, b7 b55220运算电路 F 2HARDWARE FAULT故障字1, b1 b56100内部软件 F 3SOFTWARE FAULT故障字 1, b2 b57121电机堵转 F 19MOTOR STALLED故障字 2, b2 b57302测速电机极性错误 F 17TACHO POLARITY FAULT故障字2, b0 b57305增量编码器1故障 F 16SPEED MEAS FAULT故障字 1, b15 b57310速度 F 18OVERSPEED故障字 2, b1 b57510串行接口1 F 20COMMUNICATION FAULT故障字2, b3 b59000外部错误 F 22EXTERNAL FAULT故障字2, b5 b7FF0D设备专用 F 11MAINS SYNC FAULT故障字1, b10 b7FF18设备专用 F 6TYPECODE READ FAULT故障字1, b5 b7FF19设备专用 F 4PAR FLASH READ FAULT故障字 1, b3 b7FF70设备专用 F 21LOCAL CONTROL LOST故障字2, b4 b7FF71设备专用 F 5COMPATIBILITY FAULT故障字1, b4 b7FF72设备专用 F 12FIELD UNDERCURRENT故障字 1, b11附录 B – CANopen 错误代码DCS 500CANopen 错误变频器故障寄存器位代码含义代码控制面板的文字附加信息b12120接地故障 F 5EARTH FAULT故障字1, b4 b12220连续过电流 F 2OVERCURRENT故障字1, b1 b23110电网电源过压 F 30MAINS OVERVOLTAGE故障字1, b12 b23120电网电源欠压 F 1AUXIL. UNDERVOLTAGE故障字1, b0F 29MAINS UNDERVOLTAGE故障字1, b11b23320电枢电路 F 28ARMATURE OVERVOLTAGE故障字1, b2 b34200设备温度 F 4CONVERTER OVERTEMP.故障字1, b3 b34300温度变频器 F 6MOTOR 1 OVERTEMP.故障字 1, b5F 48MOTOR 2 OVERTEMP.故障字1, b8b34310温度过高的设备 F 7MOTOR 1 OVERLOAD故障字1, b6F 27MOTOR 2 OVERLOAD故障字1, b9b57121电机堵转 F 23MOTOR STALLED故障字2, b14 b57305增量编码器1故障 F 14SPEED MEAS. FAULT故障字 2, b5 b57310速度(编码器) F 37MOTOR OVERSPEED故障字2, b15 b57500通讯(附加) F 44I/O-BOARD NOT FOUND故障字1, b7 b57510串行接口1 F 60FIELDBUS TIMEOUT故障字3, b13 b7FF0A设备专用 F 52NO BRAKE ACK故障字1, b10 b7FF0D设备专用 F 31NOT IN SYNCHRONISM故障字 1, b13 b7FF0E设备专用 F 32FIELD EX.1 OVERCURR故障字1, b14 b7FF0F设备专用 F 33FIELD EX.1 COMERROR故障字1, b15 b7FF10设备专用 F 34ARM. CURRENT RIPPLE故障字2, b0 b7FF11设备专用 F 35FIELD EX.2 OVERCURR故障字2, b1 b7FF12设备专用 F 36FIELD EX.2 COMERROR故障字 2, b2 b7FF13设备专用 F 38PHASE SEQUENCE FAULT故障字2, b3 b7FF14设备专用 F 39NO FIELD ACK.故障字2, b4 b7FF16设备专用 F 40NO EXT. FAN ACK.故障字2, b6 b7FF17设备专用 F 41NO MAIN CONT. ACK.故障字2, b7 b7FF18设备专用 F 17TYPE CODING FAULT故障字 2, b8 b7FF19设备专用 F 18BACKUP READ FAULT故障字2, b9 b7FF1A设备专用 F 50NO C FAN ACK故障字 2, b10 b7FF1B设备专用 F 20LOCAL & DISCONNECTED故障字2, b11 b7FF1C设备专用 F 42FIELD EX.1 NOT OK故障字 2, b12 b7FF1D设备专用 F 43FIELD EX.2 NOT OK故障字2, b13 b7FF2E设备专用 F 66CURRENT DIFFERENCE故障字3, b14 b7FF2F设备专用F65REVERSAL FAULT故障字3, b15附录 B – CANopen 错误代码DCS 600CANopen 错误变频器故障寄存器位代码含义代码控制面板的文字附加信息b12120接地故障 F 5EARTH FAULT故障字1, b4b12220连续过电流 F 2OVERCURRENT故障字1, b1b23110电网电源过压 F 30MAINS OVERVOLTAGE故障字1, b12b23120电网电源欠压 F 1AUXIL. UNDERVOLTAGE故障字1, b0F 29MAINS UNDERVOLTAGE故障字1, b11b23320电枢电路 F 28ARMATURE OVERVOLTAGE故障字1, b2b34200设备温度 F 4CONVERTER OVERTEMP.故障字1, b3b34300温度过高的变频器 F 6MOTOR 1 OVERTEMP.故障字1, b5F 48MOTOR 2 OVERTEMP.故障字1, b8b34310温度过高的变频器 F 7MOTOR 1 OVERLOAD故障字 1, b6F 27MOTOR 2 OVERLOAD故障字1, b9b55300操作设备PANEL LOSS故障字3, b13b55530EEPROM F 18CON FLASH故障字3, b14b56100内部软件SYSTEM FAULT故障字3, b7F 20CON-SYSTEM FAULT故障字3, b15b57121电机堵转 F 23MOTOR STALLED故障字 2, b14b57305增量编码器1故障 F 14SPEED MEAS. FAULT故障字2, b5b57310速度(编码器) F 37MOTOR OVERSPEED故障字2, b15b57500通讯(附加) F 44I/O BOARD NOT FOUND故障字1, b7b57510串行接口1DDCS CH. 0 COMM. FAULT故障字2, b11b57520串行接口2M/F LINK故障字3, b11b7FF0D设备专用 F 31NOT IN SYNCHRONISM故障字1, b13b7FF0E设备专用 F 32FIELD EX.1 OVERCURR故障字 1, b14b7FF0F设备专用 F 33FIELD EX.1 COMERROR故障字1, b15b7FF10设备专用 F 34ARM. CURRENT RIPPLE故障字2, b0b7FF11设备专用 F 35FIELD EX.2 OVERCURR故障字2, b1b7FF12设备专用 F 36FIELD EX.2 COMERROR故障字2, b2b7FF13设备专用 F 38PHASE SEQUENCE FAULT故障字 2, b3b7FF14设备专用 F 39NO FIELD ACK.故障字 2, b4b7FF16设备专用 F 40NO EXT. FAN ACK.故障字 2, b6b7FF17设备专用 F 41NO MAIN CONT. ACK.故障字 2, b7b7FF18设备专用 F 17TYPE CODING FAULT故障字2, b8b7FF1A设备专用 F 50NO C FAN ACK故障字 2, b10b7FF1C设备专用 F 42FIELD EX.1 NOT OK故障字2, b12b7FF1D设备专用 F 43FIELD EX.2 NOT OK故障字2, b13b7FF7B设备专用CON COMMUNIC故障字3, b10。
全新版大学进阶英语综合B1-U1-keystoexercises(练习答案)
全新版⼤学进阶英语综合B1-U1-keystoexercises(练习答案)综合U1 keys to exercises:使⽤说明:同学们不要做练习时直接看这答案,⽽是在⾃⼰把练习做⼀遍之后利⽤这答案来核对:检查⾃⼰做的是否正确,哪些做对了,哪些做错了,还有那些没做出来的答案是什么。
I. Understanding the text2. Comprehension Check2.1 Focusing on the main ideasDJ, hearing, deaf, musical , 18, tutoring, sympathy, dreams2.3 Understanding difficult sentences1A, 2B, 3B, 4A, 5BII. Focusing on Language in Context1. Key words and Expressions1.11creativity, 2. doing well, 3sympathy, 4 challenge, 5.over time, 6 insurance, 7. came to life, 8 by now, 9 predict, 10. all the way, 11 infection, 12 software 13 corporate 14, screen 15, frequency1.21.big on2. all the way3. motivation4. predicting5. hooked,6.pursuit of7. elementary8. folk9. taken over1.31 didn’t show up2 tutor their kids/children themselves ,3 believe in yourself 4. chasing our dreams 5 have no motivation2. Word Formation1. When you email me,2.Sea level rise can increase….3. ….that it has yellowed4. … so he bicycles to school5 G reen means ….3. Sentence Patterns.1. Why not make a plan ?2. How about looking for other opportunity ?3. Why not take a part-time job4. How about starting one5. why not take a more active part in4. Comprehensive Practice1. B am big on , challenges, motivation2. B. believe in yourself/ your dream, pursuit of your dream, over time3. a corporate , creativity, hooked on4. B. Why not, take over, all the way, do wellReading 1Comprehension check for Reading 11. T2. F3. T4. F5. F6. T7. T 8 F 9 T 10 T。
新视野大学英语1 电子优秀教案U1B1

学时
教案目的
1.To talk about college English learning。
2. To talk about college education。
3. To apply the words and phrases。
4. To master the speech writing skills。
Guide the Ss to master the writing skill: A topic sentence supported by details.
Unit 1 Fresh Start
I. Greet & introduction
1. Greet and introduce each other
•valuable life lessons, such as teamwork, leadership, or civic (公民) responsibility.
III. Text study
1.Read through the passage to get the main idea of it.
Try not to be a man of success, but rather try to become a man of value.
Section A Toward a brighter future for all
II.Warming up activities
1.Lead-in Questions
5. Detailed study of the text (85’):
6. Summary of the text. (10’)
7. Exercises. (20’)
中级微观经济学(范里安)第八章斯勒茨基方程市公开课获奖课件省名师示范课获奖课件
x1
x1’’
x1
收入效应是商品1旳价格保持在p’1上 不变,同步使收入从m’变到m时对商 品1需求旳变动,即:
x1n x1' ( p1' , m) x1'' ( p1' , m)
假如是正常商品,则收入增长会造成 需求旳增长;假如是低档商品,则收 入增长会降低需求。
替代效应旳符号
假如一种商品旳价格下降,那么可归因 于替代效应旳该商品旳需求旳变动一定是 非负旳,即: 假如p1 > p’1,则肯定有
总效应旳正负取决于收入效应。
变动率表达旳斯勒茨基方程
x1 x1s x1n
把 x1m 定义为负收入效应:
x1 x1s x1m
等式两边都除以 p1,得到:
x1 x1s x1m
p1
p1
p1
m 其中 p1 x1 ,代入上式,得:
x1 p1
x1s p1
x1m m
x1
这就是用变化率表达旳斯勒茨基恒等式。
p1x1+p2x2> p1y1+p2y2
q1y1+q2y2> q1x1+q2x2 由此,下列两不等式必成立
p1x1+p2x2≤p1y1+p2y2
q1y1+q2y2≤ q1x1+q2x2
将以上两不等式相加,重新整顿得: (q1-p1)(y1-x1) +(q2-p2)(y2-x2)≤ 0
这里, q2=p2,于是有: (q1-p1)(y1-x1) ≤ 0
2. 假如商品1价格上升,消费者旳购置力就会下降, 所以,要保持购置力不变必须增长消费者旳收 入(增长消费者对商品1旳实际支出) 。
所以,替代效应 x1s 就是在商品1旳价格变动到p’,
国际交流英语视听说B1U1 全图文

1 Unit
Living for work
Content
Think and Discuss Exploring the Theme Analytical Listening Sharing Your Ideas Viewing the World Engaging Further Listening
Think and Discuss
Questions
1. Read the caption. Would you like to do this job? Why or why not?
2. What do you think makes a good job?
3. Read the title of this unit. What do you think it means?
Living for Work
Waiters and waitresses work in cafés and restaurants. Their work can be difficult because they need to bring people food and drinks quickly. This waiter works in Perugia, Italy.
Think and Discuss
Questions
1. Would you like to do this job? Why or why not?
Example Answers
• I would like to do this job because I enjoy physical work, and I’m not afraid of high places.
现代控制理论章节习题含答案(大学期末复习资料)
《现代控制理论》第一章习题解答1.1线性定常系统和线性时变系统的区别何在?答:线性系统的状态空间模型为:x = AxBu+y CxDu= +线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A,B,C和中的各分量均为常数,而对线性时变系统,其系数矩阵D A,B,C和D中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别?答: 传递函数模型与状态空间模型的主要区别如下:1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
对于n 阶传递函数G s( )= b s n−s1nn+−1a s+n−b s1n−n2−1n+−2 + +as a+1 bs b+1 +0 0+d ,分别有⎧⎡0 1 0 0 ⎤⎡⎤0⎪⎢0 0 1 0 ⎥⎥⎢⎥⎢⎥0⎪⎢⎪⎪x =⎢ ⎥x+⎢⎥ u ⑴能控标准型:⎨⎢0 0 0 1 ⎥⎥⎢⎥⎢⎥0⎪⎢⎪⎣⎢−a0 −a1 −a2 −a n−1⎥⎦⎢⎥⎣⎦1⎪⎪⎩y=[b0 b1 b n−2 b n−1]x du+⎧⎡0 0 0 −a0 ⎤⎡b0 ⎤⎪⎪⎢⎢1 0 0 −a1 ⎥⎥⎢⎢b1 ⎥⎥⎪⎪x =⎢0 1 0 −a2 ⎥⎥x+⎢⎢ ⎥⎥u⑵能观标准型:⎨⎢b n−2⎥⎪⎢ ⎥⎢⎪⎣⎢0 0 1 −a n−1⎦⎥⎢⎣b n−1⎥⎦⎪⎪⎩y=[0 0 0 1]x du+⎧⎡p1⎪⎢0⎪x =⎢⎢ 0 p20 0 ⎤⎡1⎤0 ⎥⎢1⎥⎥x+⎢⎥u ⎥⎢ ⎥⎪⑶对角线标准型:⎨⎪⎢⎣0⎪p n⎥⎦⎢⎣1⎥⎦⎪⎩y=[c1 c2 c x du n] + 式中的pp1, 2,, p n和c c1, 2,, c n可由下式给出,G s( )= b s n−s1nn−1a s+n−b s1n−n2−1n+−2 + +as a+1 bs b+1 +0 0 + =d s p−c1 1 + s p−c2 2 + + s p−c n n +d+能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1 外,其余全为0。
应用弹塑性力学习题解答

应用弹塑性力学习题解答张宏编写西北工业大学出版社目录第二章习题答案 ..... 错误!未定义书签。
第三章习题答案 ..... 错误!未定义书签。
第四章习题答案 ..... 错误!未定义书签。
第五章习题答案 ..... 错误!未定义书签。
第六章习题答案 ..... 错误!未定义书签。
第七章习题答案 ..... 错误!未定义书签。
第八章习题答案 ..... 错误!未定义书签。
第九章习题答案 ..... 错误!未定义书签。
第十章习题答案 ..... 错误!未定义书签。
第十一章习题答案 ... 错误!未定义书签。
第二章 习题答案设某点应力张量ijσ的分量值已知,求作用在过此点平面ax by cz d ++=上的应力矢量(,,)n nx ny nz p p p p ,并求该应力矢量的法向分量n σ。
解 该平面的法线方向的方向余弦为l a d m b d n c d d ====,,,而应力矢量的三个分量满足关系nx x xy xz ny xy y yz nz xz yz z p l m n p l m n p l m nστττστττσ⎧=++⎪=++⎨⎪=++⎩ 而法向分量n σ满足关系n nx ny nx p l p m p n σ=++最后结果为()()()()22222222222nx x xy xz ny xy y yz nx xz yz z n x y z xy yz zx p a b c d p a b c a p a b c da b c ab bc ca d d a b c στττστττσσσσστττ=++=++=++=+++++=++利用上题结果求应力分量为0,2,1,1,2,0x y z xy xz yz σσστττ======时,过平面31x y z ++=处的应力矢量n p ,及该矢量的法向分量n σ及切向分量n τ。
解求出l m n ===,,nx ny nz p p p 及n σ,再利用关系222222n nx ny nz n np p p p στ=++=+可求得n τ。
国际交流英语视听说B1U1--参考答案
1. The main idea of this passage is that ___b___.
a. Tim Samaras is in hot pursuit of images of nature
b. Tim Samaras is chasing lightning with a camera
Further Listening Listening 2
A | Listen to a passage about parks and complete the main idea with what you hear.
This passage is mainly about the benefits of parks and other green spaces in Paris. They include better health, better environment, less crime and improved education.
3. The burst of light comes from _c_l_o_se__to__t_h_e_g_r_o_u_n_d_ and moves up to _t_h_e_s_k_y_.
Further Listening Listening 1
4. Although the camera is fast enough to take the picture, Samaras must know __w_h_e_r_e_t_o_p_o_i_n_t_i_t____ and also __“_c_li_c_k_”_a_t_t_h_e_r_i_g_h_t_t_im__e_.
Further Listening Listening 2
Hopf bifurcation in a three-species system with delays
JAMC J Appl Math Comput (2011)35:635–661DOI 10.1007/s12190-010-0383-x Hopf bifurcation in a three-species system with delays Xin-You Meng ·Hai-Feng Huo ·Hong XiangReceived:18August 2009/Published online:11February 2010©Korean Society for Computational and Applied Mathematics 2010Abstract A kind of three-species system with Holling II functional response and two delays is introduced.Its local stability and the existence of Hopf bifurcation are demonstrated by analyzing the associated characteristic equation.By using the nor-mal form method and center manifold theorem,explicit formulas to determine the direction of the Hopf bifurcation and the stability of bifurcating periodic solution are also obtained.In addition,the global existence results of periodic solutions bifurcat-ing from Hopf bifurcations are established by using a global Hopf bifurcation result.Numerical simulation results are also given to support our theoretical predictions.Keywords Stability ·Hopf bifurcation ·Delays ·Functional responseMathematics Subject Classification (2000)92D251IntroductionRecently,Ruan et al.[1]considered the following two-competitor/one-prey model with a Holling II functional response˙u(t)=ru(t) 1−u(t)K −au(t)v(t)1+bu(t)−Au(t)w(t)1+Bu(t),This work was partially supported by the NNSF of China (10961018),the Key Project of Chinese Ministry of Education (209131),the Project Sponsored by the Scientific Research Foundation for the Returned Overseas Chinese Scholars,State Education Ministry,the NSF of Bureau of Education of Gansu Province of China (0803-01)and the Development Program for Outstanding Young Teachers in Lanzhou University of Technology (Q200703)and the Doctor’s Foundation of LanzhouUniversity of Technology.X.-Y .Meng ·H.-F.Huo ( )·H.XiangInstitute of Applied Mathematics,Lanzhou University of Technology,Lanzhou,Gansu 730050,Chinae-mail:hfhuo@636X.-Y .Meng et al.˙v(t)=v(t)−d +eu(t)1+bu(t) ,(1.1)˙w(t)=w(t)−D −Gw(t)+Eu(t)1+Bu(t),where u(t)is the density of the prey and v(t),w(t)are the density of the two preda-tors at the time t .r,a,A,b,B,d,D,e,E,K,G are positive constants.By construct-ing a suitable Lyapunov functional,they obtained the sufficient conditions for the global stability of the positive equilibrium of system (1.1).It is well-known that time delays of one type or another have been incorporated into mathematical models of population dynamics due to maturation time,capturing time or other reasons.The effect of the past history on the stability of system is an im-portant problem in population biology.In general,delay differential equations exhibit much more complicated dynamics than ordinary differential equations since a time delay could cause a stable equilibrium to become unstable and cause the population to fluctuate.A great deal of research has been devoted to the delay model,see [2–10]and references therein.Yang [2]introduced the delay in system (1.1)and this delay is referred to as the gestation period˙u(t)=ru(t) 1−u(t)K −au(t)v(t)1+bu(t)−Au(t)w(t)1+Bu(t),˙v(t)=v(t −d +eu(t −τ)1+bu(t −τ) ,(1.2)˙w(t)=w(t) −D −Gw(t)+Eu(t −τ)1+Bu(t −τ),and considered the stability of equilibrium and the existence of Hopf bifurcation.In this paper,as a generality,we will not only introduce the delay τ1due to gestating but also the delay τ2due to maturating to the system (1.1),and consider the following system˙x(t)=rx(t) 1−x(t)K −a 1x(t)y 1(t)1+b 1x(t)−a 2x(t)y 2(t)1+b 2x(t),˙y 1(t)=y 1(t) −d 1+e 1x(t −τ1)1+b 1x(t −τ1) ,(1.3)˙y 2(t)=y 2(t) −d 2−Gy 2(t −τ2)+e 2x(t −τ1)1+b 2x(t −τ1),where x(t)is the density of the prey and y 1(t),y 2(t)are the density of the two predators at the time t .We assume that both predators feed upon the prey accord-ing to the Holling II functional response,and they compete for the common prey.r,a 1,a 2,b 1,b 2,d 1,d 2,e 1,e 2,K,G are positive constants.τ1>0is a lag due to ges-tating,τ2>0is a lag due to the growth to maturity of the second predator.The rest of this paper is organized as follows.In next section,by analyzing the character equation of linearized system of system (1.3)at positive equilibrium,someHopf bifurcation in a three-species system with delays637 sufficient conditions ensuring the local stability of the positive equilibrium and the existence of Hopf bifurcation are obtained.Some explicit formulas are given to de-termine the direction and stability of periodic solutions bifurcating from Hopf bi-furcations by applying the normal form method and center manifold theory due to Hassard et al.[11]in Sect.3.In Sect.4,the existence of periodic solutions forτfar away from Hopf bifurcation values is established by using a global Hopf bifurcation result of Wu[12].To support our theoretical predictions,some numerical simulations are also included in Sect.5.A brief discussion is also given in last section.2Local stability and Hopf bifurcationIt is obvious that system(1.3)has a unique positive equilibrium E∗=(x∗,y∗1,y∗2) defined byx∗=d1e11d1,y∗1=1+b1x∗a1r−rx∗K−a2y∗21+b2x∗,(2.1)y∗2=1G−d2+e2d1e1+b2d1−b1d1provided(H1)r−rx∗K −a2y∗21+b2x∗>0and(H2)e1b1<d1,e2d1e1+b2d1−b1d1>d2.Note that two inequalities in(H2)simply mean that the death rates of the two com-petitors must be smaller than the corresponding growth rate,otherwise the competing species cannot survive and the positive steady state does not exist.Let u1(t)=x(t)−x∗,u2(t)=y1(t)−y∗1,u3(t)=y2(t)−y∗2,we can rewrite system(1.3)as the following system˙u1(t)=a11u1(t)+a12u2(t)+a13u3(t)+i+j+k≥2f ijk1u i1u j2u k3,˙u2(t)=a21u1(t−τ1)+i+j≥2f ij2u i1(t−τ1)u j2,(2.2)˙u3(t)=a31u1(t−τ1)+a32u3(t−τ2)+i+j≥2f ij3u i1(t−τ1)u j3(t−τ2),wherea11=−rx∗K+a1b1x∗y∗1(1+b1x∗)2+a2b2x∗y∗2(1+b2x∗)2,638X.-Y .Meng et al.a 12=−a 1x ∗1+b 1x ∗,a 13=−a 2x ∗1+b 2x ∗,a 21=e 1y ∗1(1+b 1x ∗),a 31=e 2y ∗2(1+b 2x ∗),a 32=−Gy ∗2,f ijk 1=1i !j !k !∂i +j +k f 1∂u i 1∂u 2∂u k 3|(x ∗,y ∗1,y ∗2),f ij 2=1i !j !∂i +j f 2∂u 1(t −τ1)i ∂u j 2|(x ∗,y ∗1,y ∗2),f ij 3=1i !j !∂i +j f 3∂u 1(t −τ1)i ∂u 3(t −τ2)j|(x ∗,y ∗1,y ∗2),f 1=ru 1(t) 1−u 1(t)K −a 1u 1(t)u 2(t)1+b 1u 1(t)−a 2u 1(t)u 3(t)1+b 2u 1(t),f 2=u 2(t) −d 1+e 1u 1(t −τ1)1+b 1u 1(t −τ1) ,f 3=u 3(t) −d 2−Gu 3(t −τ2)+e 2u 1(t −τ1)1+b 2u 1(t −τ1).To study the stability of the equilibrium point E ∗=(x ∗,y ∗1,y ∗2),it is sufficient to study the stability of the origin for system (2.2).Consider the linearized system ofsystem (2.2)at (0,0,0)˙u 1(t)=a 11u 1(t)+a 12u 2(t)+a 13u 3(t),˙u 2(t)=a 21u 1(t −τ1),(2.3)˙u 3(t)=a 31u 1(t −τ1)+a 32u 3(t −τ2).2.1τ1=τ2=τ>0The associated characteristic equation of system (2.3)isλ3+Aλ2+(Bλ2+Cλ)e −λτ+De −2λτ=0,(2.4)where A =−a 11,B =−a 32,C =a 11a 32−a 12a 21−a 13a 31,D =a 12a 21a 32.Multi-plying e λτon both sides of (2.4),it is obvious to obtainBλ2+Cλ+(λ3+Aλ2)e λτ+De −λτ=0.(2.5)When τ=0,(2.5)becomesλ3+(A +B)λ2+Cλ+D =0.(2.6)Suppose(H3)A +B >0and (A +B)C >D .Hopf bifurcation in a three-species system with delays 639The Routh-Hurwitz criterion implies the equilibrium point is locally asymptoti-cally stable if (H3)holds.We want to determine if the real part of some root increases to reach zero and eventually becomes positive as τvaries.Now for τ=0,if λ=iω(ω>0)is a root of (2.5),then we have−Bω2+Cωi +(−ω3i −Aω2)e ωτi +De −ωτi =0.Separating the real and imaginary parts,we haveω3sin ωτ+(D −Aω2)cos ωτ=Bω2,ω3cos ωτ+(D +Aω2)sin ωτ=Cω.(2.7)It follows from (2.7)thatsin ωτ=Bω5+ACω3−CDωω6+A 2ω4−D 2,cos ωτ=(C −AB)ω4−BDω2ω6+A 2ω4−D 2.(2.8)As is known to all,sin 2ωτ+cos 2ωτ=1.So we haveω12+e 5ω10+e 4ω8+e 3ω6+e 2ω4+e 2ω4+e 1ω2+e 0=0,(2.9)where e 5=2A 2−B 2,e 4=A 4−A 2B 2−C 2,e 3=4BCD −2ADB 2−2D 2−A 2C 2,e 2=2ADC 2−2A 2D 2−B 2D 2,e 1=−C 2D 2,e 0=D 4.Denote v =ω2,then (2.9)becomesv 6+e 5v 5+e 4v 4+e 3v 3+e 2v 2+e 1v +e 0=0.(2.10)A delay system is absolutely stable if the real parts of all eigenvalues will remain negative for all values of the delay when the coefficients of the exponential polyno-mial satisfy certain assumption (see [13]and [14]).A general result in Hale et al.[14]says that a delay system is absolutely stable if and only if the corresponding ODE system is asymptotically stable and the characteristic equation has no purely imaginary roots.Since (2.10)is a equation of the sixth degree,it is difficult to study the distribution of the roots of (2.10)by Ruan’method [13].In addition,since e 0>0,the methods of [15,16]and [17]is invalid.If all the parameters of system (1.3)are given,it is easy to calculate the roots of (2.10)by using computer (see,for example,(6.2)).Thus,we give the following assumption.(H4)Equation (2.10)has at least one positive real root.Suppose that (H4)holds.Without loss of generality,we assume that it has six real positive roots,which are defined by v 1,v 2,v 3,v 4,v 5and v 6,respectively.Then (2.9)has six positive roots ωk =√v k ,k =1,2, (6)Thus,denotingτ(j)k =1ωk arcos Cω4k −ABω4k −BDω2k ωk +A 2ωk−D 2 +1ωk 2jπ,k =1,2,3,4,5,6,j =0,1,2,...,(2.11)640X.-Y.Meng et al.then±iωk are a pair of purely imaginary root of(2.5)withτ=τ(j)k.Defineτ0=τ0k=mink∈{1,2,···6}{τ0k},ω0=ωk.(2.12)Letλ(τ)=ξ(τ)+iω(τ)(2.13) be the root of(2.5)nearτ=τ0satisfyingξ(τ0)=0,ω(τ0)=ω0.(2.14) Taking the derivative ofλwith respect toτin(2.5),we obtain(2Bλ+C)dλdτ+(3λ2+2Aλ)eλτdλdτ+(λ3+Aλ2)eλτλ+τdλdτ+De−λτ−λ−τdλdτ=0,(2.15)it follows thatdλdτ=λ(De−λτ−(λ3+Aλ2)eλτ)2Bλ+C+(3λ)e−λτ.(2.16)Thendλdτ −1=2Bλ+C+(3λ2+2Aλ)eλτλDe−λτ)e−τλ.(2.17)Let=[(Dω0−Aω30)sinω0τ0−ω40cosω0τ0]2+[(Aω30−Dω0)cosω0τ0−ω40sinω0τ0]2.(2.18) Substituteλ=ω0i(ω0>0)into(2.17),we haved Reλ(τ0)dτ −1=Re2Bλ+C+(3λ2+2Aλ)eλτλDe−λτ)eλ=iω0=1(Dω0−Aω30)sinω0τ0−ω40cosω0τ0×C−3ω30cosω0τ0−2Aω0sinω0τ0×(Aω30−Dω0)cosω0τ0−ω40sinω0τ0×2Bω0−3ω20sinω0τ0+2Aω0cosω0τ0.Noting thatsignd Reλ(τ0)dτ=signd Reλ(τ0)dτ−1.(2.19)Hopf bifurcation in a three-species system with delays641 In order to give the main results,it is necessary to make the following assumption: (H5)d Reλ(τ0)dτ=0.By Corollary2.4in[10](see also[6]),we have the following theorem.Theorem2.1Suppose that(H3),(H4)and(H5)hold,the following results are true.(i)The positive equilibrium E∗of system(1.3)is asymptotically stable forτ∈[0,τ0).(ii)If >0,then the positive equilibrium E∗of system(1.3)undergoes a Hopf bifurcation whenτ=τ0.That is,system(1.3)has a branch of periodic solution bi-furcation from the zero solution nearτ=τ0.2.2τ1=τ2,τ1>0andτ2>0The associated characteristic equation of system(2.3)isλ3+(a12a21−a13a31)λe−λτ1+(−a32λ2+a11a32λ)e−λτ2−a12a21a32e−λ(τ1+τ2)=0.(2.20)We consider(2.20)withτ1in its stable interval of Yang[2].Regardingτ2as a parameter.Letωi(ω>0)be a root of(2.20),then we can obtainc1(ω)+2c2(ω)sinωτ1+2c3(ω)cosωτ1=0,(2.21) where c1(ω)=ω6+(a211−a232)ω4+((a12a21−a13a31)2−a211a232)ω2+(a12a21a32)2,c2(ω)=(a11a12a21−a11a13a31)ω2−a11a12a21a232ω,c3(ω)=(a13a31−a12a21)ω4−a12a21a232ω2.Suppose thatF(ω)=c1(ω)+2c2(ω)sinωτ1+2c3(ω)cosωτ1.Since F(0)=−(a12a21a32)2<0,and F(+∞)=+∞,then(2.21)has at least one positive root.Without loss of generality,the roots of(2.21)defined byω1,ω2,...,ωk.For everyfixedωi(i=1,2,...,k),there exists a sequence{τ(j)2i|j=1,2,...},suchthat(2.21)holds.Letτ2∗={minτ(j)2i |i=1,2,...,k,j=1,2,...}.Whenτ2=τ2∗,(2.21)has a pari of purely imaginary roots±iω∗forτ1∈[0,τ10)(hereτ10=τ0, which was obtained in Yang[2]).In the following,we assume that(H6)[dReλ(τ2)dτ2]τ2=τ(j)2i=0.Therefore,by the general Hopf bifurcation theorem for FDEs in Hale[14],we have the following results on stability and bifurcation in system(1.3).Theorem2.2For system(1.3),suppose that(H6)holds andτ1∈[0,τ10).Then the positive equilibrium E∗of system(1.3)is asymptotically stable forτ2∈[0,τ2∗),and system(1.3)undergoes a Hopf bifurcation whenτ2=τ2∗.That is,system(1.3)has a branch of periodic solution bifurcation from the zero solution nearτ2=τ2∗.642X.-Y.Meng et al. 3Direction and stability of the Hopf bifurcationIn this section,we shall study the direction of the Hopf bifurcation and the stability of bifurcating periodic solution of system(1.3)atτ1=τ2=τ=τ0.The approach employed here is the normal form method and center manifold theorem introduced by Hassard et al.[11].More precisely,we will compute the reduced system on the center manifold with the pair of conjugate complex,purely imaginary solution of the characteristic equation(2.5).By this reduction we can determine the Hopf bi-furcation direction,i.e.,to answer the question of whether the bifurcation branch of periodic solution exists locally for supercritical bifurcation or subcritical bifurcation. The Taylor expansion of system(1.3)about the equilibrium point is˙u1(t)=a11u1(t)+a12u2(t)+a13u3(t)+a14u21(t)+a15u1(t)u2(t)+a16u1(t)u3(t),˙u2(t)=a21u1(t−τ)+a22u21(t−τ)+a23u1(t−τ)u2(t),(3.1)˙u3(t)=a31u1(t−τ)+a32u3(t−τ)+a33u21(t−τ)+a34u1(t−τ)u3(t) +a35u3(t−τ)u3(t),wherea11=−rx∗K+a1b1x∗y∗1(1+b1x∗)+a1b2x∗y∗2(1+b2x∗),a12=−a1x∗1+b1x∗,a13=−a2x∗1+b2x∗,a14=−2rK+a1b1y∗1(2+b1x∗)(1+b1x∗)3+a1b2y∗2(2+b2x∗)(1+b2x∗)3,a15=−a1(1+b1x∗)2,a16=−a2(1+b2x∗)2,a21=e1y∗1(1+b1x∗),a22=−2e1b1y∗1(1+b1x∗),a23=e1(1+b1x∗)2,a31=e2y∗2(1+b2x∗)2,a33=−2e2b2y∗2(1+b2x∗)3,a34=e2(1+b2x∗)2,a32=−Gy∗2,a35=G.Letτ=τ0+μ,u(t)=(u1(t),u2(t),u3(t))T,and u t(θ)=u(t+θ)forθ∈[−τ,0]. Denote C k[−τ,0]={φ|φ:[−τ,0]→R3,φhas k-order continuous derivative}.We can rewrite system(3.1)as˙u(t)=Lμ+F(u t,μ)(3.2)Hopf bifurcation in a three-species system with delays643 withLμ(φ)=B1φ(0)+B2φ(−τ)(3.3) andF(φ,μ)=⎛⎝a14φ21(0)+a15φ1(0)φ2(0)+a16φ1(0)φ3(0)a22φ21(−τ)+a23φ1(−τ)φ2(0)a33φ21(−τ)+a34φ1(−τ)φ3(0)+a35φ3(−τ)φ3(0)⎞⎠,(3.4)whereB1= a11a12a13000000,B2=000a2100a310a32.(3.5)Then Lμis one parameter family of bounded linear operator in C[−τ,0].By the Reisz representation theorem,there exists3×3matrix-valued functionη(·,μ):[−τ,0]→R3×3(3.6) forφ∈C[−τ,0]such thatLμ= 0−τdη(θ,μ)φ(θ).(3.7)In fact,we can chooseη(θ,μ)=B1δ(θ)+B2δ(θ+τ),(3.8) whereδ(θ)is a Dirac delta function.Next,forφ∈C [−τ,0],we defineA(μ)φ(θ)=dφdθ,θ∈[−τ,0),−τdη(θ,μ)φ(θ),θ=0,(3.9)andR(μ)φ(θ)=0,θ∈[−τ,0),F(μ,φ),θ=0.(3.10)Since du tdθ=du tdt,(3.2)can be rewritten as˙u(t)=A(μ)u t+R(μ)u t,(3.11)which is an equation of the form we desired.Forθ∈[−τ,0),(3.11)is just the trivialequation du tdθ=du tdt;forθ=0,it is(3.2).Forθ∈[−τ,0),the adjoint A∗of A is defined asA∗(μ)ψ(θ)=−dψdθ,θ∈(0,τ],−τψ(−θ)dη(θ,μ),θ=0.(3.12)644X.-Y.Meng et al. Forφ∈[−τ,0)andφ∈[−τ,0),we define a bilinear formψ,φ =¯ψT(0)φ(0)− 0θ=−τθξ=0¯ψT(ξ−θ)dη(θ)φ(ξ)dξ,(3.13)whereη(θ)=η(θ,0).From the above analysis,we obtain that±iω0are the eigen-values of A(0).Let q(θ)be eigenvector of A(0)corresponding to iω0,then we haveA(0)q(θ)=iω0q(θ).(3.14) Since±iω0are the eigenvalues of A(0),and other eigenvalues have strictly negative real parts,∓iω0are the eigenvalues of A∗(0).Then we have the following lemma.Lemma3.1Let q(θ)=V e iω0θbe eigenvector of A associated with iω0,and q∗(θ)=DV∗e iω0θbe eigenvector of A∗associated with−iω0.Thenq∗,q =1, q∗,¯q =0,(3.15) whereV=(1,ρ1,ρ2)T,V∗=(1,ρ∗1,ρ∗2)T,ρ1=−e1iω0(1+b1x∗)2,ρ2=−e2(G−iω0)(ω2+G2)(1+b2x∗)2,ρ∗1=−a11x∗iω0(1+b1x∗)2,ρ∗2=−a2x∗(G+iω0)(ω2+G2)(1+b2x∗)2,¯D=[1+¯ρ∗1ρ1+¯ρ∗2ρ2+τ0e−iω0τ0(a21¯ρ∗1+a31¯ρ∗2+a32¯ρ∗2ρ∗1)]−1.Proof Since q(θ)is eigenvector of A(0)corresponding to iω0,then we haveA(0)q(θ)=iω0q(θ).(3.16) For(3.9),we can rewrite(3.16)asdq(θ)dθ=iω0q(θ),θ∈[−τ,0),L(0)q(0)=iω0q(0),θ=0.(3.17)Therefore,we can obtainq(θ)=V e iω0θ,θ∈[−τ,0],(3.18) where V=(v1,v2,v3)T∈C3is a constant vector.Based on(3.3)and(3.17),we have[iω0I−(B1+B2e−iω0τ0)]V=0,(3.19) where I is identity matrix,that isiω0−a11−a12−a13−a21e−iω0τ0iω00−a31e−iω0τ00iω0−a32e−iω0τ0V=0.(3.20)So,we can chooseV= V1V2V3=⎛⎜⎜⎝1−e1i01∗2−e2(G−iω0)(ω2+G2)(1+b2x∗)2⎞⎟⎟⎠=1ρ1ρ2.(3.21)From(3.12),we can getA∗ψ= 0−τdηT(t,0)φ(−t)=B T1φ(0)+B T2φ(τ).(3.22)Letq∗(θ)=DV∗e iω0θ,θ∈[0,τ],(3.23) where q∗=(V∗1,V∗2,V∗3)T∈C3is a constant vector.Similar to the proof of(3.16) to(3.19),we can obtainV∗= V∗1V∗2V∗3=⎛⎜⎜⎝1−a11x∗iω0(1+b1x∗)2−a2x∗(G+iω0)(ω2+G2)(1+b2x∗)2⎞⎟⎟⎠=1ρ∗1ρ∗2.(3.24)Now,we can calculate q∗,q as follows:q∗,q =¯q∗T(0)q(0)− 0θ=−τ0θξ=0¯q T(ξ−θ)dη(θ)q(ξ)dξ=¯D¯V∗T V−θ=−τ0θξ=0¯V∗T e−iω0(ξ−θ)dη(θ)V e iω0ξdξ=¯D¯V∗T V−θ=−τ0¯V∗T dη(θ)e iω0θV=¯D[¯V∗T V+τ0e−iω0τ0¯V∗T B2V]=¯D[1+¯ρ∗1ρ1+¯ρ∗2ρ2+τ0e−iω0τ0(a21¯ρ∗1+a31¯ρ∗2+a32¯ρ∗2ρ∗1)].(3.25) So,when¯D=[1+¯ρ∗1ρ1+¯ρ∗2ρ2+τ0e−iω0τ0(a21¯ρ∗1+a31¯ρ∗2+a32¯ρ∗2ρ∗1)]−1,we can get q∗,q =1.On the other hand,since ψ,Aφ = A∗ψ,φ ,we have iω q∗,¯q = q∗,A¯q = A∗q∗,¯q = −iω0q∗,¯q =iω0 q∗,¯q .(3.26) Therefore, q∗,¯q =0.This completes the proof.In the remainder of this section,by using the same notations as in Hassard et al.[11],wefirst compute the coordinates to describe the center manifold center C0at μ=0,which is locally invariant,attracting three-dimensional manifold in C0.Let u tbe solution of (3.11)when μ=0.Definez(t)= q ∗,u t ,W (t,θ)=u t −zq −¯z ¯q =u t −2Re z(t)q(θ).(3.27)On the center manifold C 0,we haveW (z,¯z ,θ)=W 20(θ)z 22+W 11(θ)z ¯z+W 02(θ)¯z 22+···,(3.28)z and ¯z are local coordinates of center manifold C 0in the direction of q ∗and ¯q ∗.Note the W is real if u t is real.We only consider real solutions.From (3.27),we getq ∗,W = q ∗,u t −zq −¯z ¯q = q ∗,u t − q ∗,q − q ∗,¯q =0.(3.29)For a solution u t ∈C 0of (3.11),from (3.7),(3.13)and μ=0,we have˙z (t)= q ∗,˙u t = q ∗,A(0)u t +R(0)u t = A ∗(0)q ∗,u t +¯q ∗(0)F (u t ,0):=iω0z(t)+¯q ∗T(0)f 0(z,¯z).(3.30)We rewrite in abbreviated form as˙z (t)=iω0z(t)+g(z,¯z ),(3.31)whereg(z,¯z )=g 20z 22+g 11z ¯z +g 02¯z 22+g 21z 2¯z 2+···.(3.32)By (3.11)and (3.31),we have˙W =˙u t −˙z q −˙¯z ¯q =A(0)u t +R(0)u t −(iω0z +g)q −(−iω0¯z +¯g)q =A(0)u t +R(0)u t −2Re (gq)=A(0)W −2Re (q ∗(0)f 0q(θ)),θ∈[−τ,0),A(0)W −2Re (¯q ∗(0)f 0q(0))+f 0,θ=0,:=A(0)W +H (z,¯z ,θ),(3.33)whereH (z,¯z ,θ)=H 20(θ)z 22+H 11(θ)z ¯z +H 02(θ)¯z 22+···.(3.34)On the other hand,On C 0˙W =W z ˙z +W ¯z ˙¯z.(3.35)Substituting (3.13)and (3.31)into (3.35),and comparing the coefficients of the above equation with those of (3.33),we get(A(0)−2iω0)W 20(θ)=−H 20(θ),A(0)W 11(θ)=−H 11(θ),(A(0)+2iω0)W 11(θ)=−H 02(θ)(3.36)Since u t=y(t+θ)=W(z,z,θ)+zq+¯z¯q,we haveu t= y1(t+θ)y2(t+θ)y3(t+θ)=W(1)(t+θ)W(2)(t+θ)W(2)(t+θ)+z1ρ1ρ2e iω0θ+z1ρ1ρ2e−iω0θ.(3.37)Therefore,we can obtain⎧⎪⎨⎪⎩y1(t+θ)=ze iω0θ+¯z e−iω0θ+W(1)20(θ)z22+W(1)11(θ)z¯z+W(1)02(θ)¯z22+···,y2(t+θ)=zρ1e iω0θ+¯z¯ρ1e−iω0θ+W(2)20(θ)z22+W(2)11(θ)z¯z+W(2)02(θ)¯z22+···, y3(t+θ)=zρ2e iω0θ+¯z¯ρ2e−iω0θ+W(3)20(θ)z22+W(3)11(θ)z¯z+W(3)02(θ)¯z22+···.(3.38)It is obvious that⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩ϕ1(0)=y1(t+θ)|θ=0=z+¯z+W(1)20(0)z22+W(1)11(0)z¯z+W(1)02(0)¯z22+···,ϕ2(0)=y2(t+θ)|θ=0=zρ1+¯z¯ρ1+W(2)20(0)z22+W(2)11(0)z¯z+W(2)02(0)¯z22+···,ϕ3(0)=y2(t+θ)|θ=0=zρ2+¯z¯ρ2+W(3)20(0)z22+W(3)11(0)z¯z+W(3)02(0)¯z22+···,ϕ1(−τ0)=ze−iω0τ0+¯z e iω0τ0+W(1)20(0)z22+W(1)11(0)z¯z+W(1)02(0)¯z22+···,ϕ2(−τ0)=zρ1e−iω0τ0+¯z¯ρ1e iω0τ0+W(2)20(0)z22+W(2)11(0)z¯z+W(2)02(0)¯z22+···,ϕ3(−τ0)=zρ2e−iω0τ0+¯z¯ρ2e iω0τ0+W(3)20(0)z22+W(3)11(0)z¯z+W(3)02(0)¯z22+···,ϕ21(0)=z2+2z¯z+¯z2+[W(1)20(0)+2W(1)11(0)]z2¯z+···,ϕ1(0)ϕ2(0)=ρ1z2+(ρ1+¯ρ1)z¯z+¯ρ1¯z2+[W(2)11(0)+W(2)20(0)2+W(2)20(0)2¯ρ1+W(2)11(0)ρ1]z2¯z+···,ϕ1(0)ϕ3(0)=ρ2z2+(ρ2+¯ρ2)z¯z+¯ρ2¯z2+[W(3)11(0)+W(3)20(0)2+W(3)20(0)2¯ρ2+W(3)11(0)ρ2]z2¯z+···,ϕ1(−τ0)ϕ2(0)=e−iω0τ0ρ1z2+(e iω0τ0ρ1+e−iω0τ0¯ρ1)z¯z+e iω0τ0¯ρ1¯z2+[e−iω0τ0W(2)11(0)+e iω0τ0W(2)20(0)2+W(1)20(−τ0)2¯ρ1+W(1)11(−τ0)ρ1]z2¯z+···,ϕ1(−τ0)ϕ3(0)=e−iω0τ0ρ2z2+(e iω0τ0ρ2+e−iω0τ0¯ρ2)z¯z+e iω0τ0¯ρ2¯z2+[e−iω0τ0W(3)11(0)+e iω0τ0W(3)20(0)2+W(1)20(−τ0)2¯ρ2+W(1)11(−τ0)ρ2]z2¯z+···,ϕ21(−τ0)=e−2iω0τ0z2+2zz+e2iω0τ0z2+[2e−iω0τ0W(2)11(−τ0)+e iω0τ0W(1)20(−τ0)+···,ϕ2(−τ0)ϕ3(0)=e−iω0τ0ρ22z2+(e iω0τ0+e−iω0τ0)ρ2¯ρ2z¯z+e iω0τ0¯ρ22z2+[ρ2W(3)11(−τ0)+e iω0τ0W(3)20(−τ0)2+W(3)20(0)2¯ρ2+W(3)11(0)ρ2e−iω0τ0]z2¯z+···.(3.39)It follows thatf0(z,z)= K11z2+K12z¯z+K13¯z2+K14z2¯zK21z2+K22z¯z+K23¯z2+K24z2¯zK31z2+K32z¯z+K33¯z2+K34z2¯z+···,(3.40)where⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩K 11=a 14+a 15ρ1+a 16ρ2,K 12=2a 14+a 15(ρ1+¯ρ1)+a 16(ρ2+¯ρ2),K 13=a 14+a 15¯ρ1+a 16¯ρ2,K 14=a 14[2W (1)11(0)+W (1)20(0)]+a 15[W (2)11(0)+W (2)20(0)2+W (1)20(0)2¯ρ1+W (1)11(0)ρ1]+a 16[W (3)11(0)+W (3)20(0)2+W (1)20(0)2¯ρ2+W (1)11(0)ρ2],K 21=a 22e −2iω0τ0+a 23e −iω0τ0,K 22=2a 22+a 23(e −iω0τ0+e iω0τ0),K 23=a 22e 2iω0τ0+a 23e iω0τ0,K 24=a 22[2e −iω0τ0W (1)11(−τ0)+e iω0τ0W (1)20(−τ0)]+a 23[e −iω0τ0W (1)11(0)+e iω0τ0W (2)20(0)2+W (1)20(−τ0)2+W (1)11(−τ0)]K 31=a 33e −2iω0τ0+a 34e −iω0τ0ρ2+a 35e −iω0τ0ρ22,K 32=2a 33+a 34[−¯ρ2e −iω0τ0+ρ2e iω0τ0+ρ2¯ρ2(e iω0τ0+e −iω0τ0)],K 33=a 33e 2iω0τ0+a 34e iω0τ0¯ρ2+a 35e iω0τ0¯ρ22,K 34=a 33[2e −iω0τ0W (1)11(−τ0)+e iω0τ0W (1)20(−τ0)]+a 34[e −iω0τ0W (3)11(0)+e iω0τ0W (3)20(0)2+W (1)20(−τ0)2¯ρ2+W (1)11(−τ0)ρ2]+a 35[e −iω0τ0W (3)11(−τ0)+¯ρ2W (3)20(−τ0)2+e iω0τ0W (3)20(0)2¯ρ2+W (1)11(0)ρ2e −iω0τ0].(3.41)Since q ∗T (0)=¯D(1,¯ρ∗1,¯ρ∗2),we have g(z,¯z )=¯q ∗T (0)f 0(z,¯z )=¯D(1¯ρ∗1¯ρ∗2) K 11z 2+K 12z ¯z +K 13¯z 2+K 14z 2¯z K 21z 2+K 22z ¯z +K 23¯z 2+K 24z 2¯z K 31z 2+K 32z ¯z+K 33¯z 2+K 34z 2¯z +···=¯D {(K 11+¯ρ∗1K 21+¯ρ∗2K 31)z 2+(K 12+¯ρ∗1K 22+¯ρ∗2K 32)zz +(K 13+¯ρ∗1K 23+¯ρ∗2K 33)z 2+(K 14+¯ρ∗1K 24+¯ρ∗2K 34)z 2z }+···.Comparing the coefficients of the above equation with (3.32),we haveg 20=2¯D(K 11+¯ρ∗1K 21+¯ρ∗2K 31),g 11=¯D(K 12+¯ρ∗1K 22+¯ρ∗2K 32),g 02=2¯D(K 13+¯ρ∗1K 23+¯ρ∗2K 33),g 21=2¯D(K 14+¯ρ∗1K 24+¯ρ∗2K 34).(3.42)We still need to W 20(θ)and W 11(θ)for θ∈[−τ0,0)for the expression of g 21.Indeed,we haveH (z,¯z ,θ)=−2Re (¯q ∗(0)G 0q(θ))=−2Re (g(z,¯z )q(θ))=−g(z,¯z )q(θ)−¯g(z,¯z )¯q(θ)=− g 20z 22+g 11z ¯z +g 02¯z 22+g 21z 2¯z 2q(θ)− ¯g 20¯z 22+¯g 11z ¯z +¯g 02z 22+¯g21¯z 2z2¯q(θ)···.Comparing the coefficients of the above equation with those in (3.34),it is obviousthatH 20(θ)=−g 20q(θ)−¯g 02¯q(θ),H 11(θ)=−g 11q(θ)−¯g 11¯q(θ).(3.43)It follows from (3.9)and (3.36)that˙W20(θ)=AW 20(θ)=2iω0W 20(θ)−H 20(θ)=2iω0W 20(θ)+g 20q(θ)+g 02¯q(θ)=2iω0W 20(θ)+g 20q(0)e iω0θ+¯g 02q(0)e −iω0θ.Solving for W 20(θ),we can obtainW 20(θ)=ig 20q(0)ω0e iω0θ+i ¯g 02¯q(0)3ω0e −iω0θ+E 1e 2iω0θ.(3.44)By a similar way,we getW 11(θ)=−ig 11q(0)ω0e iω0θ+i ¯g 11¯q(0)ω0e −iω0θ+E 2.(3.45)Where E 1=(E (1)1,E (2)1,E (3)1)T and E 2=(E (1)2,E (2)2,E (3)2)T are both three dimen-sional vectors,and can be determined by setting θ=0in H (z,¯z ,θ).In fact,we haveH (z,¯z ,0)=−2Re (¯q ∗T(0)f 0q(0))+f 0(z,¯z)=−g 20z 22+g 11z ¯z +g 02¯z 22+g 21z 2¯z 2 q(0)− ¯g 20¯z 22+¯g 11z ¯z +¯g 02z 22+¯g21¯z 2z2¯q(0)+ K 11z 2+K 12z ¯z +K 13¯z 2+K 14z 2¯z K 21z 2+K 22z ¯z +K 23¯z 2+K 24z 2¯z K 31z 2+K 32z ¯z+K 33¯z 2+K 34z 2¯z +···.Comparing the coefficients of the above equation with those in (3.34),it follows thatH 20(0)=−g 20q(0)−¯g02¯q(0)+2(K 11,K 21,K 31)T .(3.46)H11(0)=−g11q(0)−¯g11¯q(0)+(K12,K22,K32)T.(3.47) By the definition of A and(3.9),(3.36),we can get−1dη(0,θ)W20(θ)=2iω0W20(0)−H20(0).(3.48)−1dη(0,θ)W11(θ)=−H11(0).(3.49) Notice thatiω0I− 0−1dη(0,θ)e iω0θq(0)=0,−iω0I− 0−1dη(0,θ)e−iω0θ¯q(0)=0.Substituting(3.44)and(3.48)into(3.46),we obtain2iω0I− 0−1dη(0,θ)e2iω0θE1=2K11K21K31,(3.50)which leads to2iω0−a11−a12−a13−a21e−2iω0τ02iω00−a31e−2iω0τ002iω0−a32e−2iω0τ0E1=2K11K21K31.(3.51)It follows thatE1=2 2iω0−a11−a12−a13−a21e−2iω0τ02iω00−a31e−2iω0τ002iω0−a32e−2iω0τ0−1 K11K21K31.(3.52)Similarly,substituting(3.45)and(3.49)into(3.47),we obtainE2=− a11a12a13a2100a310a32−1 K12K22K32.(3.53)Thus,we can determine W20(θ)and W11(θ)from(3.2)and(3.45).Furthermore,we can see that each g ij in(3.42)is determined by parameters and delays in system(1.3). Thus,we can compute the following quantities.⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩c1(0)=i2ω0(g20g11−2|g11|2−|g02|23)+g212,μ2=−Re{c1(0)}Re{λ (τ0)},β2=2Re{c1(0)},T2=−Im{c1(0)}+μ2Im{λ(τ0)}ω0,(3.54)which determine the quantities of bifurcation periodic solutions in the center mani-fold at the critical value τ0.By the results of Hassard et al.[11],we have the following results.Theorem 3.1In (3.54),the following results hold :(i)The sign of μ2determines the direction of the Hopf bifurcation :if μ2>0(μ2<0),then the Hopf bifurcation is supercritical (subcritical )and the bifur-cation periodic solutions exist for τ>τ0(τ<τ0).(ii)The sign of β2determines the stability of the bifurcating periodic solution :thebifurcation periodic solutions are stable (unstable )if β2<0(β2>0).(iii)The sign of T 2determines the period of the bifurcating periodic solutions :theperiod increase (decrease )if T 2>0(T 2<0).4Global existence of periodic solutionsIn this section,we shall investigate the global existence of periodic solutions bifurcat-ing from the point (E ∗,τ(j)k ),j =0,1,2,...by applying a global Hopf bifurcation result due to Wu [12].Let R 3+={(x,y 1,y 2)∈R 3,x >0,y 1>0,y 2>0},X =C([−τ,0],R 3+)and z t =(x t ,y 1t ,t 2t )T ∈X be defined as z t (θ)=z(t +θ)for t ≥0and θ∈[−τ,0].Since x(t),y 1(t)and y 2(t)denote the densities of the prey,the first predator and the second predator,respectively,the positive solution of system (1.3)is of interest and its periodic solutions only arise in the first quadrant.Thus,throughout this section,we consider system (1.3)only in the domain R 3+.It is easy to see that system (1.3)can be rewritten as the following functional differential equation˙z (t)=F (z t ,τ,p),(4.1)parameterized by two nonnegative real parameters (τ,p)∈R +×R +,where R +=[0,+∞).It is obvious that (4.1)has only an equilibria z ∗=E ∗in R 3+under the assumption (H1),(H2)and easily to see that the mapping F :X ×R +×R +is completely continuous.If we restrict F to the subspace of constant function Z ,then F is identified with R 3+and thus we obtain a mapping F =F |R 3+×R +×R +:R 3+×R +×R +→R 3+.Let ¯z 0∈X be the constant mapping with value z 0∈R 3+.The point (¯z 0,τ0,p 0)iscalled a stationary solution of system (4.1)if F (¯z 0,τ0,p 0)=0.From system (1.3)we know easily that the following condition regarding the mapping Fholds.(A1) F∈C 2(R 3+×R +×R +,R 3+).It follows from system (1.3)that D z F(z,τ,p)=⎛⎜⎝r −2rx K−a 1y 1(1+b 1x)2−a 2y 2(1+b 2x)2−a 1x 1+b 1x −a 2x1+b 2xe 1y 1(1+b 1x)2−d +e 1x 1+b 1xe 2y 2(1+b 2x)2−d 2−2Gy 2+e 2x 1+b 2x⎞⎟⎠.(4.2)。
用空间向量研究直线平面的位置关系
如图,直线 l⊥α,取直线 l 的方向向量 a ,称向量 a 为 平面 α 的 法向量 .
给定一个点 A 和一个向量 a,那么过点 A,且以向量 a 为法向量的平面完全确定,可以表示为集合 {P|a ·―A→P =0} .
(二)基本知能小试
1.判断正误
(1)直线l的方向向量是唯一的.
由题意得F(0,0,0),P0,0,来自3 2 ,D-1,
23,0
,C
0,
23,0
,
E 0,
43,
3 4
.所以
―F→E =
0,
43,
3 4
,
―→ FD
=
-1,
23,0 .设平面DEF的
法向量为m=(x,y,z),
则mm··― ―FF→ →DE = =00, ,
即
43y+
43z=0,
-x+ 23y=0.
2.空间直线的向量表示式 如图,取定空间中的任意一点 O,可以得到点 P 在直线 l 上的充要条件是 存在实数 t,使 ―O→P =―O→A +t―A→B , ① 将―A→B =a 代入①式,得 ―O→P = ―O→A +ta . ② ①式和②式都称为空间直线的向量表示式.
3.平面的向量表示式 取定空间任意一点 O,可以得到,空间一点 P 位于平面 ABC 内的充要条 件是存在实数 x,y,使 ―O→P = ―O→A +x―A→B +y―A→C . 把上式称为空间平面 ABC 的向量表示式.
提示:空间两直线平行与空间两向量平行的含义是不同的,直线平行是 不允许重合的,而两向量平行,它们所在的直线可以平行也可以重合.
(2)如何应用平面的法向量证明线面平行和面面平行? 提示:证明线面平行关键是看直线的方向向量与平面的法向量是否垂 直,证明面面平行关键是看两平面的法向量是否共线.
1.4.1 用空间向量研究直线平面的位置关系课件高二数学人教A版选择性必修第一册(共50页PPT)
一的有序实数对 (x, y) ,使得 OP xa yb .
这样,点 O 与向量 a,b 不仅可以确定平面 ,
b
还可以具体表示出 内的任意一点.
Oa α
P
空间平面的向量表示式
如图,取定空间任意一点 O,可以得到,空间一点 P 位于平面 ABC 内的充要条 件是存在实数 x,使
OP OA x AB y AC ③.
l1 l2 u1 u2 R ,使得 u1 u2 .
u1
l1
l2
u2
如图,设 u 是直线 l 的方向向量,n 是平面 的法向量,l ,则 l unun 0.
u
l
n
如图,设 n1 , n2 分别是平面 , 的法向量,则 n1 n2 R ,使得 n1 n2 .
n2
n1
例 2 证明“平面与平面平行的判定定理”:若一个平面内的两条相交直线与另一个 平面平行,则这两个平面平行. 已知:如图, a , b , a b P , a ,b .求证: .
空间中点、直线和平面的向量表示
如图,在空间中,我们取一定点 O 作为基点,那么空间中任意一点 P 就可以用 向量 OP 来表示. 我们把向量OP 称为点 P 的位置向量.
P
p
定点O
对空间中点的位置向量的理解
(1)空间中点的位置向量是空间中点的向量表示,是空间中点的另一种表 示形式,即用向量语言表示空间中的点; (2)用点的位置向量表示点时,基点可以任意选取,例如可选取定点 A 作为基 点,用 AP 表示点 P 的位置; (3) 在确定好基点的情况下,点P的位置向量由点P的位置唯一确定; (4)在空间直角坐标系下,如果选择坐标原点O作为基点,则空间中点P的 位置向量的坐标即为P的坐标.
理学状空表达式

例 RLC电路 输入: u(t) 输出: uc(t)
LC
d 2uc dt 2
RC
duc dt
uc
u
LR
u(t) i(t ) C
uc (t)
状态变量: uc (t)、i(t)
解 列方程
改写为
C
duc dt
i(t)
L
di dt
Ri
uc
u(t )
duc dt
1 C
i(t)
+
b22
x 2
a12
x2
+
a22
a21
c11 +
y1
c12
c21 c22 +
y2
多输入多输出系统结构图多以矢量结构图形 式表示
x Ax Bu y Cx Du
D
u
x
x
+y
B
C
+
A
§1-3 状态空间表达式的建立(一)
三种途径求状态空间表达式:{ A,B,C,D }
•由系统框图建立; •由系统工作机理建立; •由系统微分方程或传递函数建立。 一. 由系统框图建立状态空间表达式
y 1 0 0x
0 0
k
x
k
u
p z p
二.由系统工作机理建立状态空间表达式
【例1-5】列写电枢控制
直流电动机的状态空间表
RL
达式。
u(t) i(t ) M w J
B
解: (1) 确定输入u,输出w,
状态变量:i 、w 。
+ _ if
(2) 列写原始方程
电枢回路电压方程 L di Ri e u ①
热传导方程的差分解法
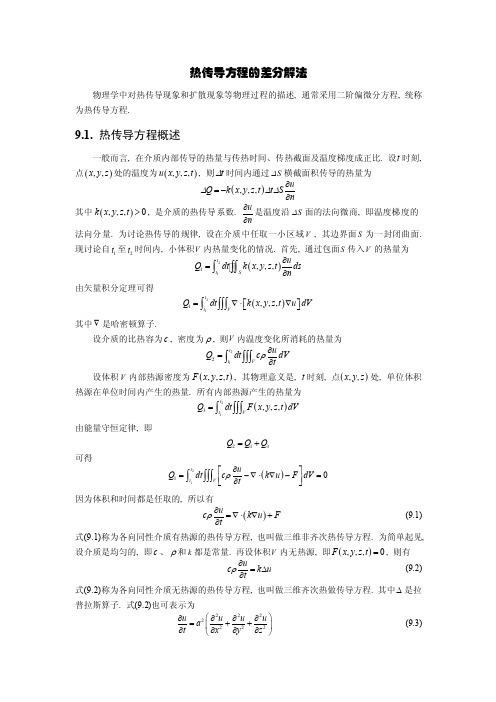
热传导方程的差分解法物理学中对热传导现象和扩散现象等物理过程的描述, 通常采用二阶偏微分方程, 统称为热传导方程.9.1. 热传导方程概述一般而言, 在介质内部传导的热量与传热时间、传热截面及温度梯度成正比. 设t 时刻, 点(),,x y z 处的温度为(),,,u x y z t , 则t ∆时间内通过S ∆横截面积传导的热量为(),,,uQ k x y z t t S n∆∆∆∂=-∂其中(),,,0k x y z t >, 是介质的热传导系数. un ∂∂是温度沿S ∆面的法向微商, 即温度梯度的法向分量. 为讨论热传导的规律, 设在介质中任取一小区域V , 其边界面S 为一封闭曲面. 现讨论自1t 至2t 时间内, 小体积V 内热量变化的情况. 首先, 通过包面S 传入V 的热量为()211,,,t t S u Q dt k x y z t ds n ∂=∂⎰⎰⎰ 由矢量积分定理可得()211,,,t t VQ dt k x y z t u dV =∇⋅∇⎡⎤⎣⎦⎰⎰⎰⎰ 其中∇是哈密顿算子.设介质的比热容为c , 密度为ρ, 则V 内温度变化所消耗的热量为212t t V u Q dt c dV tρ∂=∂⎰⎰⎰⎰设体积V 内部热源密度为(),,,F x y z t , 其物理意义是, t 时刻, 点(),,x y z 处, 单位体积热源在单位时间内产生的热量. 所有内部热源产生的热量为()213,,,t t VQ dt F x y z t dV =⎰⎰⎰⎰由能量守恒定律, 即213Q Q Q =+可得()2110t t Vu Q dt c k u F dV t ρ∂⎡⎤=-∇⋅∇-=⎢⎥∂⎣⎦⎰⎰⎰⎰因为体积和时间都是任取的, 所以有 ()u c k u F t ρ∂=∇⋅∇+∂ (9.1) 式(9.1)称为各向同性介质有热源的热传导方程, 也叫做三维非齐次热传导方程. 为简单起见, 设介质是均匀的, 即c 、ρ和k 都是常量. 再设体积V 内无热源, 即(),,,0F x y z t =, 则有u c k u t ρ∂=∆∂ (9.2) 式(9.2)称为各向同性介质无热源的热传导方程, 也叫做三维齐次热做传导方程. 其中∆是拉普拉斯算子. 式(9.2)也可表示为2222222u u u u a t xy z ⎛⎫∂∂∂∂=++ ⎪∂∂∂∂⎝⎭ (9.3)其中2k a c ρ=. 9.2. 一维热传导方程的差分解法各向同性介质中无热源的一维热传导方程为22220,0u u a a t T t x ∂∂=><≤∂∂ (9.4) 其中T 表明时间的有限范围. 要求解方程(9.4), 需要一定的初始条件和边界条件, 统称为定解条件.9.2.1 初值问题()(),0u x x x ϕ=<+∞ (9.5)即初始时刻空间各点的温度颁布函数.9.2.2 初、边值混合问题初始条件为()(),00u x x x l ϕ=≤≤ (9.6)0x =和x l =两端的边界条件有三种情况:第一类边界条件()()()()120,0,u t g t t u l t g t =⎧⎪≥⎨=⎪⎩(9.7) 第二类边界条件()()()()120,0,u t g t xt T u l t g t x∂⎧=⎪⎪∂≤≤⎨∂⎪=⎪∂⎩ (9.8) 其中()1g t 、()2g t 为给定函数.第三类边界条件()()()()()()()()11220,0,0,,u t t u t g t xt T u l t t u l t g t xλλ∂⎧-=⎪⎪∂≤≤⎨∂⎪-=⎪∂⎩ (9.9) 其中1λ、2λ、()1g t 、()2g t 为给定函数, 其中10λ≥, 20λ≥, 且不同时为零.用差分方法求解偏微分方程式(9.4), 首先要建立差分格式. 通常取空间步长和时间步长均为常量. 设空间步长为h , 时间步长为τ, 计算时的步序号空间用i 表示, 时间用k 表示.定义一阶向前商近似为1kk k i i i u u u xh ++∂-=∂一阶向后差商近似为1k k k i i i u u u xh--∂-=∂二阶中心差商作为二阶微商近似为21122,2k k k i i i i k u u u ux h +--+∂=∂ (9.10) 对时间的一阶差分近似为1,k k i i i k u u ut τ+-∂=∂ (9.11) 将(9.10)和式(9.11)代入(9.4), 并令22a h τα=(9.12)即可得一维热传导方程的差分格式为()111121,2,,10,1,,k k k k i i i i u u u u i N k Mααα++-=+-+=-= (9.13)其中,l T N M h τ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦, “[]”表示取整.定解条件为()()()()()()001211,2,,11,11,,1i kk Nu i h i N u g k u g k k M ϕττ=-=+=-=-=+差分公式(9.13)为显式格式, 可由初始条件和边界条件逐次计算出任一时刻各点的温度. 习惯上把时刻计算的各点称为一层, 而计算则是一层一层进行的. 计算过程中层间各点的关系如图9.1所示. 从图中可直观地看出, 1k +时刻第i 个点的值是由k 时刻1i -, i 和1i +三点的值算出来.由于初始条件和边界条件的误差及其计算中的舍入误差, 用式(9.13)计算出的值并非该式的精确解k i u . 设计算值与其精确之间的误差为k i ε, 若当k 增加时, k i ε有减小的趋势, 或至少不增加, 则称其差分格式为稳定差分格式. 可以证明, 对于一维热传导方程, 差分格式(9.13)为稳定差分格式的充分条件是2212a h τα=≤(9.14) 差分格式(9.13)计算的具体步骤如下: 1. 给定2,,,,a l h T α2. 计算初始值: ,l T N M h τ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦, 计算22h aατ=3. 计算初始值:()()011,2,,1i u i h i N ϕ=-=+ ;计算边界值:()()()()0121,11,,1k k N u g k u g k k M ττ=-=-=+ 4. 用差分格式(9.13)计算1k i u +. 泛定方程2201,0u ux t t x ∂∂=<<<∂∂初始条件()(),04101u x x x x =-≤≤边界条件()()0,001,0u t t u t =⎧⎪≤⎨=⎪⎩程序设计: clear %设置参数 lambda=1; alpha=1/6; L=1; h=0.01; T=0.6;tao=alpha*h^2/lambda; N=fix(L/h); M=fix(T/tao);%设置u 矩阵及x 的值 I=N+1; K=M+1; for i=1:I x(i)=(i-1)*h; endu(I,K)=zeros; %设置初始条件 u(:,1)=4.*x.*(1-x);%设置左端第一类边界条件 u(1,:)=0;%设置右端第一类边界条件 u(I,:)=0; %计算矩阵u for k=1:K for i=2:I-1u(i,k+1)=1/6*u(i+1,k)+2/3*u(i,k)+1/6*u(i-1,k); end end %u ; for k=1:1000:Kplot(x,u(:,k),'-k','LineWidth',2) hold on endx/cmT C Oaxis([0,1,0,1])xlabel ('\fontsize{14}\bfx/cm') ylabel ('\fontsize{14}\bfTC^O') grid on8.6 一维扩散方程的有限差分格式8.6.1 隐式六点差分格式(C —N 格式)以下介绍一维扩散方程或热传导方程的有限差分解法, 考虑一维扩散方程的定解问题()()()()()()()22max 2002111222,,0,0,0t u x t u x t a x l t t t x u x t u x k a u c a u b c x n ua ubc x l n ρ=⎧∂∂=≤≤<<⎪∂∂⎪=⎪⎛⎫⎪=⎨ ⎪∂⎝⎭+==⎪∂⎪⎪∂+==⎪∂⎩ (8.62) 取,x h t ∆∆τ==进行离散化, 如图8.12所示, 结点坐标为()()()()11,2,11,2,i kx i h i N t k k K τ=-=⎧⎪⎨=-=⎪⎩ (8.63) 结点处的函数为(),ki k i u x t u =. 在(),12i k +点, u t∂∂用中心差商,22ux∂∂用(),i k 和(),1i k +两点的中心差商的平均值代替, 则(8.62)中的偏微分方程变为()()()1111111121222k k k k k k k k i i i i i i i i u u u u u u u u hλτ+++++-+-⎡⎤-=-++-+⎣⎦(8.64) 引入212211,1,1a P P P h P Pτ==+=-, 将上式中的含()1k u +项移至等号左边, 将含()ku 项移至等号右边, 式(8.64)变为11111112122k k k k k k i i i i i i u Pu u u Pu u ++++-+--+-=++ (8.65) 上式表明由k 时的值可求得1k +时的u 值, 但要解联立方程组, 所以这种差分格式是隐式的. 整个方程涉及到六个点处的u 值, 所以称为隐式差分格式, 又称为Crank_Nicolson 格式, 简称C_N 格式, 误差为()()22O O h τ+, 是无条件稳定的.8.6.2 边界条件的差分格式由式(8.62)知, 一维扩散方程的边界条件为()()11122200u a u b c x n u a u b c x a n ∂⎧+==⎪⎪∂⎨∂⎪+==⎪∂⎩(8.66)在x 轴上设置两个虚格点0i =和1i N =+(见图8.13). 用中心差商代替.66)中的un∂∂, 则得()()1110212211222N N N b a u u u c hb a u u uc h +-⎧+-=⎪⎪⎨⎪+-=⎪⎩(8.67) 由式(8.67)解出011111222u hc b ha u b u =-+tk +k 图8.12和12222122N N N u hc b ha u b u +-=-+,代入1i =的式(8.65), 有()()11112111111122211111121111121111112121211111222222222242k k k k k k k k k k k k k k k k u Pu hc ha u u u P u hc ha u b u b ub Puha ub ub u b P u hc ha u b u ++++++++-+--+=++-+-++-=++-+整理得到()()1111111212111212k k k kb P ha u b u b P ha u b u hc +++-=-++ (8.68(a)) 同理, 代入i N =的式(8.65), 得到 ()()()()1111111211111222211122221211111222121212212222222222222222k k k k k k N N N N N N k k k k k k k kN N N N N N N N k k k k k k k N N N N N N N u Pu u u P u u hc b ha u b u Pu u hc ha u b u P u u hc ha u b u b Pu b u hc ha u u b P u b ++++-+-++++----++++----+-=++--++-=-+++--++-=-+++21k N u - 整理得()()11212122122222k k k kN N N N b u b P ha u b u b P ha u hc ++---++=+-+ (8.68(b))8.6.3 差分方程组及其求解把式(8.65)和式(8.68(a))和(8.68(b))结合起来, 构成差分方程组, 其形式为AU R = (8.69)其中, ()12,,N U u u u = 是未知量组成的矢量. 系数矩阵A 是三对角的, 而R 是由前一时刻的u 值组成的矢量()12,,N R R R R = . 该方程可利用MA TLAB 求解. 由式(8.65)和式(8.68(a))和(8.68(b))可知()()11211121121212222222k kk k ki i i i k k NN N R b P ha u b u hc R u P u u R b u b P ha u hc-+-⎧=-++⎪=++⎨⎪=+-+⎩ (8.70) 11111112213121121121b P ha b P P A P b b P ha +-⎛⎫ ⎪-- ⎪ ⎪-- ⎪= ⎪ ⎪ ⎪-- ⎪ ⎪-+⎝⎭ (8.70)8.6.4 计算实例研究细杆导热问题. 杆的初始温度是均匀的0u , 保持杆的一端的温度为不变的0u ,至于另一端则有强度为恒定的0q 的热流进入. (解析解见数理方法P214)杆上温度(),u x t 满足下列泛定方程和定解条件(数理方法P214)()20t xx u a u a k c ρ-== (8.71)00x x x lu u u q k ==⎧=⎪⎨=⎪⎩ (8.72) ()000t u u x l ==<< (8.73)边界条件不是齐次的, 首先要处理这个问题. 取一个既满足边界条件(8.72)又满足泛定方程(8.71)的函数(),v x t ,()00,q v x t u x k=+(8.74)计算程序: clear%设置边界条件参数 u0=0; q0k=10; D=1; a1=1.0; b1=0.0; a2=0.0; b2=1.0; c1=u0; c2=q0k;%设置u 矩阵及计算解方程系数 I=101; K=101; h=0.1; tao=0.1; P=tao*D/h^2; P1=1/P+1; P2=1/P-1;for i=1:I x(i)=(i-1)*h; end for k=1:K t=(k-1)*tao; endu(I,K)=zeros; %设置初始条件 u(:,1)=u0;%设置左端第一类边界条件 u(1,:)=u0; %设置系数矩阵A A(I,K)=zeros; A(1,1)=b1*P1+h*a1;x/cmu /u 0A(1,2)=-b1;A(I,K-1)=-b2;A(I,K)=b2*P1+h*a2;for i=2:K-1A(i,i)=2*P1;A(i,i-1)=-1;A(i,i+1)=-1;end%解方程for k=1:K-1R(1,1)=(b1*P2-h*a1)*u(1,k)+b1*u(2,k)+2*h*c1;R(I,1)=b2*u(I-1,k)+(b2*P2-h*a2)*u(I,k)+2*h*c2;for i=2:I-1R(i,1)=u(i-1,k)+2*P2*u(i,k)+u(i+1,k);endc=rank(A)==rank([A R]);u(:,k+1)=A\R;end%作图程序for k=10:20:100plot(x,u(:,k),'-k','LineWidth',2)hold onendaxis([0,10,0,35])xlabel ('\fontsize{14}\bfx/cm')ylabel ('\fontsize{14}\bfu/u_0')grid on%理论结果作图程序clearu0=0;q0k=10;I=101;h=0.1;D=1;for i=1:Ix(i)=(i-1)*h;endl=10;a=sqrt(D);for k=10:20:100t=0.1*k;u=0;for n=1:1000u=u+2*q0k*l/pi^2*(-1).^(n)./(n-1/2)^2*exp(-(n-1/2).^2*pi^2*a^2.*t/l^2).*sin((n-1/2).*pi.*x/l);endU=u+u0+q0k.*x;plot(x,U,':r','LineWidth',2)hold onendaxis([0,10,0,35])grid on例:clear%设置边界条件参数u0=0;q0k=10;D=1;a1=1.0;b1=0.0;a2=0.0;b2=1.0;c1=u0;c2= 0;%设置u矩阵及计算解方程系数I=101;K=101;h=0.1;tao=0.1;P=tao*D/h^2;P1=1/P+1;P2=1/P-1;for i=1:Ix(i)=(i-1)*h;endfor k=1:Kt=(k-1)*tao;endu(I,K)=zeros;%设置初始条件u(:,1)=-q0k.*x;%设置左端第一类边界条件u(1,:)=u0;%设置系数矩阵AA(I,K)=zeros;A(1,1)=b1*P1+h*a1;A(1,2)=-b1;A(I,K-1)=-b2;A(I,K)=b2*P1+h*a2;for i=2:K-1A(i,i)=2*P1;A(i,i-1)=-1;A(i,i+1)=-1;end%解方程for k=1:K-1R(1,1)=(b1*P2-h*a1)*u(1,k)+b1*u(2,k)+2*h*c1;R(I,1)=b2*u(I-1,k)+(b2*P2-h*a2)*u(I,k)+2*h*c2;for i=2:I-1R(i,1)=u(i-1,k)+2*P2*u(i,k)+u(i+1,k);endc=rank(A)==rank([A R]);u(:,k+1)=A\R;end%作图程序for k=1:10:101plot(x,u(:,k),'-k','LineWidth',2)hold onend%axis([0,10,0,35])xlabel ('\fontsize{14}\bfx/cm')ylabel ('\fontsize{14}\bfu/u_0')grid on%理论结果作图程序clearu0=0;q0k=10;I=101;h=0.1;D=1;for i=1:Ix(i)=(i-1)*h;endl=10;a=sqrt(D);for k=1:10:101t=0.1*(k-1);u=0;for n=1:10000u=u+2*q0k*l/pi^2*(-1).^(n)./(n-1/2)^2*exp(-(n-1/2).^2*pi^2*a^2.*t/l^2).*sin((n-1/2).*pi.*x/l);endU=u;plot(x,U,':r','LineWidth',2)hold onend%axis([0,10,0,35])grid onx/cmu /u 0热传导方程的混合问题泛定方程2201,0u u x t t x ∂∂=<<<∂∂初始条件 ()(),04101u x x x x =-≤≤边界条件()()0,001,0u t t u t =⎧⎪≤⎨=⎪⎩ 问题的数值解.clear%设置边界条件参数u0=0;D=1;a1=1.0;b1=0.0;a2=1.0;b2=0.0;c1=u0;c2=u0;%设置u 矩阵及计算解方程系数I=101;K=101;h=0.01;tao=0.01;P=tao*D/h^2;P1=1/P+1;P2=1/P-1;for i=1:Ix(i)=(i-1)*h;endfor k=1:Kt=(k-1)*tao;endu(I,K)=zeros;%设置初始条件u(:,1)=4.*x.*(1-x);%设置左端第一类边界条件u(1,:)=u0;%设置右端第一类边界条件u(101,:)=u0;x/cmu /u 0%设置系数矩阵AA(I,K)=zeros;A(1,1)=b1*P1+h*a1;A(1,2)=-b1;A(I,K-1)=-b2;A(I,K)=b2*P1+h*a2;for i=2:K-1A(i,i)=2*P1;A(i,i-1)=-1;A(i,i+1)=-1;end%解方程for k=1:K-1R(1,1)=(b1*P2-h*a1)*u(1,k)+b1*u(2,k)+2*h*c1;R(I,1)=b2*u(I-1,k)+(b2*P2-h*a2)*u(I,k)+2*h*c2;for i=2:I-1R(i,1)=u(i-1,k)+2*P2*u(i,k)+u(i+1,k);endc=rank(A)==rank([A R]);u(:,k+1)=A\R;end%作图程序for k=1:5:101plot(x,u(:,k),'-k','LineWidth',2)hold onend%axis([0,10,0,35])xlabel ('\fontsize{14}\bfx/cm')ylabel ('\fontsize{14}\bfu/u_0')grid on泛定方程2201,0u u x t t x ∂∂=<<<∂∂初始条件 ()()(),0sin 4101u x x x x =-≤≤边界条件 ()()0,001,0u t t u t =⎧⎪≤⎨=⎪⎩问题的数值解.clear%设置参数lambda=1;alpha=1/6;L=1;h=0.01;T=0.6;tao=alpha*h^2/lambda;N=fix(L/h);M=fix(T/tao);%设置u 矩阵及x 的值I=N+1;K=M+1;for i=1:Ix(i)=(i-1)*h;endu(I,K)=zeros;%设置初始条件u(:,1)=sin(4*pi.*x.*(1-x));%设置左端第一类边界条件u(1,:)=0;%设置右端第一类边界条件u(I,:)=0;%计算矩阵ufor k=1:Kfor i=2:I-1 u(i,k+1)=1/6*u(i+1,k)+2/3*u(i,k)+1/6*u(i-1,k); endendu;for k=1:100:1000plot(x,u(:,k),'-k','LineWidth',2)hold onend%axis([0,1,0,1])xlabel ('\fontsize{14}\bfx/cm') ylabel ('\fontsize{14}\bfTC^O') grid on。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4. By your own experience e.g.
The door was so low that I hit my head on the lintel.
Key
a piece of wood across the top of a door 门楣
5. By sentences before or after the sentence e.g.
1. 起作用 2. 扮演一个角色 认识到, 知道, 觉察到 认识到 知道 另外, 另外 加之 深思, 深思 考虑 1.说出意见或看法 大声说 说出意见或看法2.大声说 说出意见或看法 做完, 完成 做完 留出余地; 为···留出余地 考虑到 留出余地 某人所做的; 某人所做的 就某人而言 赶上, 赶上 追上 使想起; 使想起 提醒
Text Study
New Words Text Understanding New Expressions
sentence Patterns
I. Pronunciation
community expand aware unique ideal forum remove visual barrier hinder n. v. a. a. a. n. vt. a. n. vt. [C] 1. 团体 2. 社区居民 社区 社区居民; (使)变大 使) 扩张 使)膨胀 使 变大 变大;(使 扩张;(使 膨胀 意识到的; 意识到的 知道的 1. 极不寻常的 2. 唯一的 1. 最好的 理想的 2. 想象的 最好的; [C] 论坛 讨论会 论坛; 1. 消除 2. 移开 挪走 移开, 视觉的 [C] 障碍 阻碍, 妨碍, 阻碍 妨碍 阻止
Explanation
The definition “the practice or condition of having one marriage partner”, set off by two commas, gives a clear meaning of the word “monogamy”.
Explanation
un(prefix: 否) + fore(prefix: 预先) 预先) +see(stem: 看)+able(suffix: 能…的) 的
visual: a. gained by or connected with seeing 视觉的
visual defect / impression / nerve / test /navigation / education 视力缺陷/视觉印象/视觉神经/视 视力缺陷/视觉印象/视觉神经/ 力测试/目视导航/ 力测试/目视导航/直观教育
6. By examples e.g.
Select any of these periodicals: Times, Newsweek or Reader’s Digest.
Key
a magazine which comes out at regular times 期刊,杂志
7. By word part clues
absolutely explicit comment reinforce requirement likely commit assimilate provide input
ad. a. n./vi. vt. n. ad./a. vt. vt. vt. n.
完全地; 完全地 十足地 清楚的; 清楚的 直截了当的 [C] 意见 评论 / 评论 意见; 强化; 加固 强化 [C] 要求 要求的东西 要求; 要求的东西 可能的; 可能地 / 可能的 有希望的 1. 使用 用于 2. 犯 (错误 使用, 错误) 错误 吸收, 理解, 吸收 理解 掌握 提供 [U] 输入 投入 输入;
II. Matching Game
b __environment a. a physical object that keeps two areas, people apart c __community b. conditions in which people live a __barrier __barrier c. a group of people living d __ideal together d. perfect, what you like best e __absolute e. complete f __arise f. come into being, happen
III. Old to New
probable very necessary very important unusual give order make sth. stronger a way of considering sth. • • • • • • • likely essential vital unique instruct reinforce perspective
[Suffix] [Chinese meaning] Suffix] meaning] -er/or -e -ible 劝告者; 劝告者;顾问 设计; 设计;发明 看不见的 先见; 先见;预知 供应;准备 供应; 监督; 监督;指导 电视; 电视;电视机
-visvis-
-ion -ion -ion -ion
[构词法 :com(prefix:共同 构词法]: 共同)+muni(stem:服 构词法 共同 服 性质, 务)+ty(suffix:性质,状态 性质 状态)
Family members: commune v.交流 交谈 交流;交谈 交流 communicate v.传送 联络 通讯 传送;联络 传送 联络;通讯 communication n.通讯 交通 通讯;交通 通讯 communion n.沟通 共有 交往 沟通;共有 沟通 共有; communism n. 共产主义 communist n. 共产主义者 immune adj. 免疫的; adj. 免疫的;免除的 immunity n. 免疫性 immunize v. 使免疫
The visual knowledge of a place of battle helps a general to plan his attack.
[Prefix] Prefix] adaddedeininprepreproprosupersuperteletele-
[Stem] Stem]
addition reflect environment critical perspective peer instruct instructor arise absolute
n. v. n. a. n. n. vt. n. vi. a.
1. [U] 添加 2. [C] 增加物 1. 深思 反省 2. 反映 体现 深思, 反映, [C, U] 环境 周边状况 环境; 周边状况 1. 极为重要的 2. 评论的 [C] 视角 观点 视角; [C] 同龄人 同等地位的人 同龄人; 1.教育 指导 指示 命令 通知 教育,指导 指示,命令 教育 指导2.指示 命令;通知 [C] 教师 指导者 教师; 1. 出现 发生 2. 引起 产生 出现; 引起, 完全的; 完全的 十足的
定义) 1. By definition (定义) e.g.
The harbor (港口) is protected by a jetty — a wall built out into the water.
Key
防波堤
定义) 1. By definition (定义)
Example
Monogamy, the practice or condition of having one marriage partner, is now adopted by most countries as one of state policies.
Contents
Reading Skills
1
2
Text Study Test Yourself
3
Reading Skills
I. Finding out Word Meanings
II. Decide Your Choice
I Finding out Word Meanings
In how many ways can you guess the meanings of new words?
Word part clues—stems(词干 and affixes(词缀 词干) 词缀) 词干 词缀 also help to find out word meaning.
Example
With many factors unforeseeable, there is no reason for us to show a sweeping optimism about our plan.
• I am a resoluபைடு நூலகம்e man. Once I set up a goal, I won’t give it up easily. • After spending three weeks in the woods, Henry was tired of solitude.
Key
• having great determination or firmness 坚定的, 果断的 • being alone and away from other people 孤独
essential challenge normally sequence sequential vital personally effective facilitate facilitator
要素; a. / n. 必不可少的 / [C] 要素 要点 质疑 向 挑战 vt. / n. 1.质疑 2.向···挑战 / [C, U]挑战 ad. 通常 正常地 通常; n. [C, U] 1. 连续 一连串 2. 次序 连续; a. 连续的 a. 极其重要的 充满生机的 极其重要的; ad. 亲自 a. 1. 有效的 起作用的 2. 生效的 有效的, vt. 使容易 有助于 使容易; n. [C] 促进者 推动者 促进者,