miniupnpc交叉编译
交叉编译树莓派内核教程

交叉编译树莓派内核教程以下是一个交叉编译树莓派内核的教程:1. 准备交叉编译工具链:在你的主机上安装交叉编译工具链。
树莓派使用的是ARM架构,所以你需要一个适用于ARM的工具链。
你可以下载一个现成的工具链,也可以从源代码自己构建。
2. 获取树莓派内核源代码:你可以从树莓派官方网站上下载最新的内核源代码。
解压缩源代码到你的主机上的某个目录中。
3. 配置交叉编译环境:在源代码目录中运行以下命令来配置交叉编译环境:```export CROSS_COMPILE=<交叉编译工具链的前缀>export ARCH=arm```4. 配置内核:在源代码目录中运行以下命令来配置内核选项: ```make <树莓派型号>_defconfig```5. 编译内核:运行以下命令来编译内核:```make -j4````-j4`参数指定使用4个线程进行编译,你可以根据你的主机的配置进行调整。
6. 交叉编译模块:如果你需要编译一些内核模块,你可以运行以下命令:```make modules```7. 安装内核:将编译好的内核和模块拷贝到你的树莓派上。
你可以通过将生成的zImage文件拷贝到/boot目录来安装内核。
同时,将生成的设备树文件(.dtb)也拷贝到/boot目录。
8. 配置启动文件:编辑/boot/config.txt文件,将kernel选项指向你编译好的内核文件。
9. 重启树莓派:现在,你可以重启你的树莓派,它将加载你编译好的内核。
这些步骤将帮助您交叉编译树莓派内核。
请注意,这只是一个概述,具体步骤可能会因环境而异。
您可能需要参考更详细的教程或根据您的需求进行自定义配置。
交叉编译环境的搭建简介(精)

交叉编译环境的搭建简介在一种计算机环境中运行的编译程序,能编译出在另外一种环境下运行的代码,我们就称这种编译器支持交叉编译。
这个编译过程就叫交叉编译。
简单地说,就是在一个平台上生成另一个平台上的可执行代码。
这里需要注意的是所谓平台,实际上包含两个概念:体系结构(Architecture、操作系统(Operating System。
同一个体系结构可以运行不同的操作系统;同样,同一个操作系统也可以在不同的体系结构上运行。
举例来说,我们常说的x86 Linux平台实际上是Intel x86体系结构和Linux forx86操作系统的统称;而x86 WinNT平台实际上是Intel x86体系结构和Windows NT for x86操作系统的简称。
有时是因为目的平台上不允许或不能够安装我们所需要的编译器,而我们又需要这个编译器的某些特征;有时是因为目的平台上的资源贫乏,无法运行我们所需要编译器;有时又是因为目的平台还没有建立,连操作系统都没有,根本谈不上运行什么编译器。
交叉编译这个概念的出现和流行是和嵌入式系统的广泛发展同步的。
我们常用的计算机软件,都需要通过编译的方式,把使用高级计算机语言编写的代码(比如C代码编译(compile成计算机可以识别和执行的二进制代码。
比如,我们在Windows平台上,可使用Visual C++开发环境,编写程序并编译成可执行程序。
这种方式下,我们使用PC 平台上的Windows工具开发针对Windows本身的可执行程序,这种编译过程称为native compilation,中文可理解为本机编译。
然而,在进行嵌入式系统的开发时,运行程序的目标平台通常具有有限的存储空间和运算能力,比如常见的 ARM 平台,其一般的静态存储空间大概是16到32MB,而CPU的主频大概在100MHz到500MHz之间。
这种情况下,在ARM 平台上进行本机编译就不太可能了,这是因为一般的编译工具链(compilation tool chain需要很大的存储空间,并需要很强的CPU 运算能力。
《交叉编译环境》课件

1
解决平台问题
使用交叉编译可使移动应用程序适用于大多数平台。
2
早期原型演示
交叉编译可使早期原型演示更加容易,并且可以在更短的时间内创建完整的应用程 序。
3
顺应市场变化
移动应用程序的开发非常依赖于市场趋势,交叉编译可以使应用程序顺应市场变化。
交叉编译在跨平台开发中的应用
在本节中,我们将探讨交叉编译在跨平台开发中的应用场景。无论是桌面应用程序、移动应用程 序,还是Web应用程序,交叉编译都具有广泛的适用性。
硬件限制的克服
利用交叉编译可以轻松移 植代码以克服硬件限制的 难题。
减少开发时间和成本
使用交叉编译可以加快开 发速度,同时减少开发工 作量和成本。
多平台容易适配
交叉编译可以轻松在不同 平台之间切换,提高了软 件的可移植性。
交叉编译环境的基本组成
在本节中,我们将探讨交叉编译环境的基本组成。此外,还将介绍对于大多数嵌入式系统和移动应 用程序开发而言必不可少的工具链。
1 不同平台的统一体验
使用交叉编译可使应用在不同平台上拥有统一的外观和体验。
2 降低维护成本
使用交叉编译可降低应用程序跨平台开发视图的维护成本。
3 更广泛的应用面
交叉编译可用于开发各种各样的应用程序,无论是桌面应用程序、移动应用程序,还是 Web应用程序。
交叉编译在开源社区中的应用
在本节中,我们将探讨开源社区中的交叉编译应用,例如Linux内核、嵌入式系统开发工具、网络安全 性等。
1
选择编译器
如何选择最合适的编译器。
安装库和头文件
2
安装必要的库和头文件,以便在目标
系统上编译代码时能够找到必要的支
撑。
3构建交叉ຫໍສະໝຸດ 译工具链如何使用适当的工具,构建交叉编译
soem交叉编译

soem交叉编译
交叉编译是一种将源码从一种平台编译并生成可执行文件或者库,能在另一种平台上运行的技术。
所谓交叉编译,就是在一台计算机上编译出适用于不同硬件平台的目标程序。
在嵌入式领域,交叉编译是非常常见的技术,因为嵌入式设备往往无法直接运行 PC 上的程序。
通常在 PC 上,我们只需要安装一个编译器就可以进行编译。
但是在嵌入式设备上,有时候需要一个特定的编译器,才能为它们编译出可运行的程序。
因此,在进行交叉编译之前,我们需要了解目标平台的操作系统、CPU 架构和具体的开发环境。
交叉编译的过程分为三个步骤:
1.编写源代码:首先需要编写源代码。
要注意代码的移植性,避免采用平台特定的语言扩展和依赖。
2.选择编译器:选择适合目标设备的编译器,如果是嵌入式开发,通常使用 GNU 工具链,也可以使用针对特定体系结构的编译器。
3.交叉编译:使用选定的编译器进行交叉编译。
在编译的过程中,需要为目标设备指定正确的体系结构和操作系统,以确保生成的代码符合目标设备的要求。
总的来说,交叉编译能够大大提高开发和移植的效率和准确性,是嵌
入式系统开发过程中不可缺少的一环。
常用的交叉编译工具包括:GNU 交叉工具链、ARM 开发工具包、MIPS 开发工具包、x86 嵌入式交叉编译器等等。
总之,作为一名嵌入式开发者,学习掌握交叉编译技术能够为我们的开发工作带来诸多优势,尤其是遇到需要在不同硬件平台上运行的应用程序时,交叉编译技术无疑是必不可少的。
国产交叉编译框架

国产交叉编译框架
国产交叉编译框架有以下几个:
1. GCC:GNU Compiler Collection,是一套开源的编译器套件,支持多种编程语言,包括C、C++、Fortran、Ada等。
GCC支持交叉编译,可以在不同的目标平台上生成可执行文件。
2. CMake:是一个跨平台的自动化构建系统,用于控制编译过程。
它使用一个名为的文件来描述构建过程,可以生成标准的makefile或Visual Studio项目文件。
CMake支持交叉编译,可以指定不同的目标平台和编译器。
3. BSPBuild:是华为开源的交叉编译框架,用于构建嵌入式系统的软件。
BSPBuild使用XML文件描述构建过程,支持多种目标平台和编译器,如ARM、MIPS、PowerPC等。
4. OpenEmbedded:是一个用于构建嵌入式Linux操作系统的交叉编译框架。
OpenEmbedded使用BitBake作为构建工具,支持交叉编译,可以生成适用于不同目标平台的根文件系统映像。
5. Yocto Project:是Linux基金会下的一个开源项目,旨在为嵌入式Linux开发提供一套完整的工具链和构建系统。
Yocto Project使用OpenEmbedded作为交叉编译框架,支持多种目标平台和编译器,如ARM、MIPS、x86等。
这些国产交叉编译框架各有特点和优势,可以根据具体需求选择适合的工具。
miniupnpc交叉编译

miniupnpc交叉编译摘要:1.MiniUPnP 概述2.交叉编译的概念与流程3.MiniUPnP 的交叉编译方法4.交叉编译的优缺点5.总结正文:1.MiniUPnP 概述MiniUPnP(Mini Universal Plug and Play)是一款基于UPnP 协议的开源NAT 穿透工具,它可以在不同的NAT 设备之间建立稳定的连接,实现内网与外网的互通。
这对于那些需要在内网和外网之间传输数据的应用和设备来说,提供了极大的便利。
2.交叉编译的概念与流程交叉编译是指在特定的硬件平台上,使用该平台的编译器来编译适合其他硬件平台的软件。
这种编译方式可以使得软件在不同的平台上运行,提高软件的可移植性。
交叉编译的一般流程包括以下几个步骤:(1)获取源代码:从开源项目的官方网站或GitHub 仓库中获取源代码。
(2)搭建编译环境:根据目标硬件平台的体系结构,安装相应的编译器、链接器等工具,并配置环境变量。
(3)编译源代码:使用交叉编译器编译源代码,生成目标文件。
(4)链接目标文件:将编译生成的目标文件链接成可执行文件。
(5)测试与调试:在目标硬件平台上运行可执行文件,并进行功能测试和性能调试。
3.MiniUPnP 的交叉编译方法MiniUPnP 采用C++编写,支持多种操作系统,如Windows、Linux 和FreeBSD 等。
为了实现在不同平台上的编译,可以采用以下方法:(1)使用CMake 进行交叉编译。
CMake 是一个跨平台的构建系统,可以根据不同的操作系统和编译器生成相应的Makefile。
(2)使用Visual Studio 进行Windows 平台上的交叉编译。
Visual Studio 是微软推出的一款集成开发环境,支持C++编程,并可以在Windows 平台上进行交叉编译。
(3)使用GCC 进行Linux 和FreeBSD 平台上的交叉编译。
GCC 是GNU 推出的一款开源编译器,支持C++编程,并可以在Linux 和FreeBSD 等平台上进行交叉编译。
linux交叉编译环境搭建步骤
linux交叉编译环境搭建步骤正文:在进行Linux交叉编译之前,我们需要先搭建好相应的交叉编译环境。
下面是搭建步骤的详细说明:步骤一:安装必要的软件包首先,我们需要安装一些必要的软件包,包括GCC、binutils、glibc 以及交叉编译工具链等。
可以通过包管理器来安装这些软件包,比如在Ubuntu上可以使用apt-get命令,CentOS上可以使用yum命令。
步骤二:下载交叉编译工具链接下来,我们需要下载相应的交叉编译工具链。
可以从官方网站上下载已经编译好的工具链,也可以通过源码自行编译得到。
下载好之后,将工具链解压到一个目录下。
步骤三:配置环境变量为了方便使用交叉编译工具链,我们需要将其添加到系统的环境变量中。
可以通过编辑.bashrc文件来实现,添加类似下面的内容:```shellexport CROSS_COMPILE=/path/to/cross-compiler/bin/arm-linux-export ARCH=arm```其中,/path/to/cross-compiler是你下载的交叉编译工具链的路径。
步骤四:测试交叉编译环境在配置好环境变量之后,我们可以通过简单的测试来验证交叉编译环境是否搭建成功。
比如,可以尝试编译一个简单的Hello World程序,并在目标平台上运行。
步骤五:编译其他软件当交叉编译环境搭建成功,并且测试通过之后,我们就可以使用这个环境来编译其他的软件了。
比如,可以使用交叉编译工具链来编译Linux内核、U-Boot引导程序、驱动程序等。
总结:搭建Linux交叉编译环境是进行嵌入式开发的基础工作之一。
在搭建好环境之后,我们可以使用交叉编译工具链来编译适配于目标平台的软件,从而实现在开发主机上进行开发和调试的目的。
交叉编译环境_ubuntu
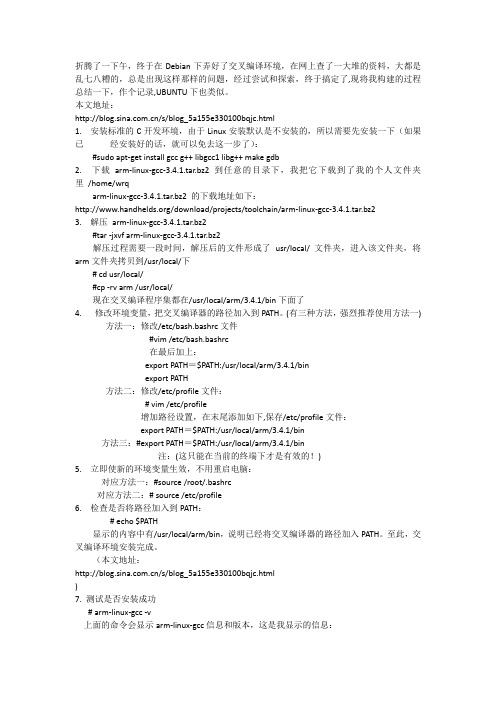
折腾了一下午,终于在Debian下弄好了交叉编译环境,在网上查了一大堆的资料,大都是乱七八糟的,总是出现这样那样的问题,经过尝试和探索,终于搞定了,现将我构建的过程总结一下,作个记录,UBUNTU下也类似。
本文地址:/s/blog_5a155e330100bqjc.html1.安装标准的C开发环境,由于Linux安装默认是不安装的,所以需要先安装一下(如果已经安装好的话,就可以免去这一步了):#sudo apt-get install gcc g++ libgcc1 libg++ make gdb2.下载arm-linux-gcc-3.4.1.tar.bz2到任意的目录下,我把它下载到了我的个人文件夹里/home/wrqarm-linux-gcc-3.4.1.tar.bz2 的下载地址如下:/download/projects/toolchain/arm-linux-gcc-3.4.1.tar.bz23.解压arm-linux-gcc-3.4.1.tar.bz2#tar -jxvf arm-linux-gcc-3.4.1.tar.bz2解压过程需要一段时间,解压后的文件形成了usr/local/ 文件夹,进入该文件夹,将arm文件夹拷贝到/usr/local/下# cd usr/local/#cp -rv arm /usr/local/现在交叉编译程序集都在/usr/local/arm/3.4.1/bin下面了4. 修改环境变量,把交叉编译器的路径加入到PATH。
(有三种方法,强烈推荐使用方法一)方法一:修改/etc/bash.bashrc文件#vim /etc/bash.bashrc在最后加上:export PATH=$PATH:/usr/local/arm/3.4.1/binexport PATH方法二:修改/etc/profile文件:# vim /etc/profile增加路径设置,在末尾添加如下,保存/etc/profile文件:export PATH=$PATH:/usr/local/arm/3.4.1/bin方法三:#export PATH=$PATH:/usr/local/arm/3.4.1/bin注:(这只能在当前的终端下才是有效的!)5.立即使新的环境变量生效,不用重启电脑:对应方法一:#source /root/.bashrc对应方法二:# source /etc/profile6.检查是否将路径加入到PATH:# echo $PATH显示的内容中有/usr/local/arm/bin,说明已经将交叉编译器的路径加入PATH。
qnx 交叉编译

qnx 交叉编译
QNX是一种实时操作系统,常常被用于开发嵌入式系统和工业控制设备。
要进行QNX交叉编译,可以按照以下步骤进行:
1.安装交叉编译环境:首先,需要在本地的机器上安装交叉编译环境。
这个环境通常
包括编译器、链接器和其他一些必要的工具。
2.配置目标系统:你需要配置目标系统,也就是你希望运行的设备。
这通常涉及到指
定设备的处理器架构、内存大小等参数。
3.创建交叉编译工具链:基于目标系统的配置,你可以创建一个交叉编译工具链。
这
个工具链包括一些特定的编译器、链接器和其他工具,它们都是针对目标系统的架构进行优化的。
4.编写代码并交叉编译:使用交叉编译工具链,你可以将你的源代码编译成目标系统
可以执行的二进制文件。
5.部署和测试:最后,你需要将编译后的二进制文件部署到目标系统上,并进行测试
以确保一切正常工作。
具体操作中,你需要根据你的设备和项目需求进行一些相应的调整和配置。
注意,由于QNX 的版本和具体硬件设备可能会影响交叉编译的过程,所以建议在实际操作前仔细阅读相关的文档和教程。
vnstat 交叉编译

vnstat 交叉编译vnstat是一款用于监控网络流量的工具,可以在Linux系统上使用。
但是,有时候我们需要在其他平台上使用vnstat,比如嵌入式系统或者ARM架构的设备。
这时候就需要进行交叉编译。
交叉编译是指在一台计算机上编译出另一种架构的可执行文件。
在这里,我们需要将vnstat编译成适用于目标平台的可执行文件。
下面是vnstat交叉编译的主要内容:1. 选择交叉编译工具链交叉编译需要使用特定的工具链,这个工具链包括编译器、链接器、头文件和库文件等。
我们需要根据目标平台的架构选择相应的工具链。
比如,如果目标平台是ARM架构,我们可以选择arm-linux-gnueabi工具链。
2. 配置编译环境在进行交叉编译之前,我们需要配置编译环境。
这包括设置环境变量、安装必要的库文件和头文件等。
具体的配置方法可以参考交叉编译工具链的文档。
3. 下载vnstat源代码我们需要从vnstat的官方网站下载源代码。
可以选择最新的稳定版本或者开发版。
下载后,解压缩源代码。
4. 配置编译选项在进行编译之前,我们需要配置编译选项。
这包括指定交叉编译工具链、设置编译选项等。
具体的配置方法可以参考vnstat的文档。
5. 进行交叉编译配置好编译选项后,我们可以开始进行交叉编译了。
在终端中进入vnstat源代码目录,执行make命令即可开始编译。
编译完成后,会生成可执行文件vnstat。
6. 将可执行文件拷贝到目标平台编译完成后,我们需要将生成的可执行文件拷贝到目标平台上。
可以使用scp命令或者其他文件传输工具进行拷贝。
7. 在目标平台上运行vnstat将可执行文件拷贝到目标平台后,我们就可以在目标平台上运行vnstat了。
在终端中执行vnstat命令即可开始监控网络流量。
以上就是vnstat交叉编译的主要内容。
交叉编译虽然有些复杂,但是可以让我们在不同的平台上使用同一款工具,提高了开发效率。
Mispeed和ARM交叉编译环境的搭建
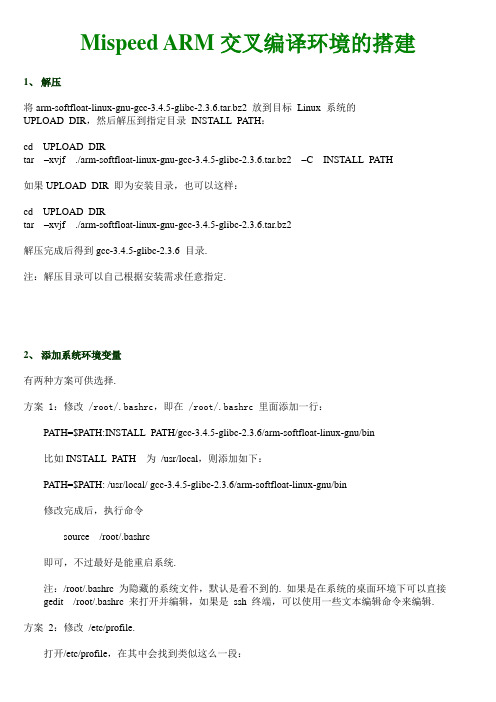
Mispeed ARM交叉编译环境的搭建1、解压将arm-softfloat-linux-gnu-gcc-3.4.5-glibc-2.3.6.tar.bz2 放到目标Linux 系统的UPLOAD_DIR,然后解压到指定目录INSTALL_PATH:cd UPLOAD_DIRtar –xvjf ./arm-softfloat-linux-gnu-gcc-3.4.5-glibc-2.3.6.tar.bz2 –C INSTALL_PATH如果UPLOAD_DIR 即为安装目录,也可以这样:cd UPLOAD_DIRtar –xvjf ./arm-softfloat-linux-gnu-gcc-3.4.5-glibc-2.3.6.tar.bz2解压完成后得到gcc-3.4.5-glibc-2.3.6 目录.注:解压目录可以自己根据安装需求任意指定.2、添加系统环境变量有两种方案可供选择.方案 1:修改 /root/.bashrc,即在 /root/.bashrc 里面添加一行:PATH=$PATH:INSTALL_PATH/gcc-3.4.5-glibc-2.3.6/arm-softfloat-linux-gnu/bin比如INSTALL_PATH 为/usr/local,则添加如下:PATH=$PATH: /usr/local/ gcc-3.4.5-glibc-2.3.6/arm-softfloat-linux-gnu/bin修改完成后,执行命令source /root/.bashrc即可,不过最好是能重启系统.注:/root/.bashrc 为隐藏的系统文件,默认是看不到的. 如果是在系统的桌面环境下可以直接gedit /root/.bashrc 来打开并编辑,如果是ssh 终端,可以使用一些文本编辑命令来编辑. 方案2:修改/etc/profile.打开/etc/profile,在其中会找到类似这么一段:# Path manipulationif [ "$EUID" = "0" ]; thenpathmunge /sbinpathmunge /usr/sbinpathmunge /usr/local/sbinelsepathmunge /usr/local/sbin afterpathmunge /usr/sbin afterpathmunge /sbin afterfi在if [ "$EUID" = "0" ]; 后面的then 和else 之间添加一行:pathmunge INSTALL_PATH/gcc-3.4.5-glibc-2.3.6/arm-softfloat-linux-gnu/bin比如INSTALL_PATH 为/usr/local,则添加后如下:# Path manipulationif [ "$EUID" = "0" ]; thenpathmunge /sbinpathmunge /usr/sbinpathmunge /usr/local/sbinpathmunge /usr/local/gcc-3.4.5-glibc-2.3.6/arm-softfloat-linux-gnu/binelsepathmunge /usr/local/sbin afterpathmunge /usr/sbin afterpathmunge /sbin afterfi修改完后执行命令source /etc/profile即可,同样建议重启系统.安装成功与否的判断:在执行完上述的source 命令后,通过arm-softfloat-linux-gnu-gcc –v 来查看交叉GCC 的版本,如果安装成功,会显示如下:。
交叉编译步骤

交叉编译步骤1.交叉编译包的安装创建文件夹mkdir /usr/local/arm解压xzvf 4.3.1-eabi-armv6-up-cup6410.tar.gz 到/usr/local/arm目录下tar xzvf 4.3.1-eabi-armv6-up-cup6410.tar.gz -C /usr/local/arm修改配置文件vi ~/.bashrcPATH=$PATH:$HOME/bin:/usr/local/arm/4.3.1-eabi-armv6/usr/binLD_LIBRARY_PATH=/usr/local/arm/4.3.1-eabi-armv6/gmp/lib:/usr/local/arm/4.3.1-eabi-armv6/mpfr/lib更新配置文件source ~/.bashrc检测是否安装成功which arm-linux-gcc 或者 arm-linux-gcc -v(如果出现arm-linux-gcc的版本信息,则安装成功gcc version 4.3.1 (for S3C64XX Samsung Electronics AP Development Team)2.minicom 连接与配置minicom (-s 端口设置)(波特率115200 数据位0 奇偶校验位无停止位 1 数据流控制无)(minicom ctrl+a x 退出查看串口名称 ls -l /dev/ttyS*)3.if配置查看宿主机ip,开发板ip 保证在同一个网段ping命令测试连通性ifconfig eth0 192.168.1.145 netmask 255.255.255.0关闭防火墙 setup查看防火墙 /etc/init.d/iptables status4.nfs服务编辑exports文件,进入exports文件后进行对要挂载文件的配置/usr/192.168.1.199 (rw,sync),然后保存并推出。
miniupnpc 交叉编译

miniupnpc交叉编译`miniupnpc`是一个用于实现UPnP(通用即插即用)协议的小型库。
如果你需要在一个不同体系结构或操作系统上进行交叉编译,你需要进行一些额外的步骤。
以下是一个通用的交叉编译步骤的概述,以及一些可能的注意事项:1.获取源代码:首先,你需要获取`miniupnpc`的源代码。
你可以从官方网站或版本控制系统(如GitHub)上获取。
2.配置交叉编译环境:设置适当的交叉编译工具链,以确保生成的二进制文件能够在目标系统上运行。
这可能包括设置正确的编译器、头文件路径等。
3.配置`miniupnpc`:进入`miniupnpc`源代码目录,运行`configure`脚本,并使用`--host`选项指定目标体系结构。
例如,对于ARM体系结构,可以使用类似以下的命令:```bash./configure--host=arm-linux-gnueabi```这会生成一个适用于ARM体系结构的Makefile。
4.进行编译:运行`make`命令来编译`miniupnpc`。
```bashmake```5.检查生成的二进制文件:确保生成的二进制文件是为目标体系结构编译的。
你可以使用`file`命令检查二进制文件的体系结构。
```bashfile miniupnpc```6.将生成的二进制文件复制到目标系统:将编译生成的库和可执行文件复制到目标系统,并测试它们是否能够在目标系统上正常运行。
这是一个通用的步骤,具体的步骤可能因操作系统和目标体系结构的不同而有所变化。
确保查阅`miniupnpc`文档和交叉编译工具链的文档,以获取更详细和具体的信息。
树莓派交叉编译环境搭建

树莓派交叉编译环境搭建(1) 在适当的⽬录下下载并郝村交叉编译所需的⼯具,命令如下:“mkdir -p /home/mxdxyz/toolchain” 创建⽬录“cd /home/mxdxyz/toolchain” 进⼊所创建的⽬录(2) 解压⽂件tar xvzf raspbian-toolchain-gcc-4.7.2-linux32.tar.gz注:64-bit Ubuntu 使⽤⼀下命令:tar xvzf raspbian-toolchain-gcc-4.7.2-linux64.tar.gz(3) 添加相应的路径“export PATH=/home/mxdxyz/toolchain/raspbian-toolchain-gcc-4.7.2-linux32/bin:$PATH”若只执⾏以上命令,每次ubuntu重启,在做交叉编译前都需要运⾏以上命令。
若经常需要进⾏交叉编译,我们可以修改~/.bashrc⽂件,将以上命令添加到⽂件的最后⼀⾏即可。
(4) 编写程序hello.c测试,这⾥编译时使⽤命令:arm-linux-gnueabihf-gcc –o ~/hello_RPi ~/hello.c以⽣成RPi可以执⾏的⼆进制⽂件,若使⽤命令cc –o ~/hello_RPi ~/hello.c 则⽣成ubuntu可执⾏的⽂件。
可能需要下载并安装软件包gcc-arm-linux-gnueabihf,命令为:sudo apr-get install gcc-arm-linux-gnueabihf(5) 将可执⾏⼆进制⽂件hello_RPi转移到树莓派上运⾏,使⽤scp命令:我的是scp ~/hello_RPi ,⼤家根据⾃⼰的情况做相应调整。
在树莓派上运⾏结果如下:⾄此,ubuntu系统上的交叉编译成功。
树莓派交叉编译环境搭建

树莓派交叉编译环境搭建拿树莓派是想⽤来做开发,⽽树莓派那么⽕更多的原因是可以DIY,开发和DIY还是有点区别的,⽽国内外论坛多数的资料还是在DIY这块,系统的进⾏开发找到的不是很多。
打算⽤树莓派移植Qt和OpenCV看看在图像处理⽅⾯能否做点事情,⼊门的第⼀个问题就是建⽴交叉编译平台,搜索了点资料,发现⼀篇说的⽐较详细,英⽂⽂章,这⾥全⽂转载。
In this blog entry the setup of a cross-compiling development environment for the Raspberry Pi will be demonstrated. This will include the (available from github)We will finally write a simple Hello World program on our Kubuntu virtual machine (VM), compile it using the cross compiler and then deploy it onto our Raspberry Pi board to run it.I’m going to assume that you have alreadyand that you have Ubuntu / Kubuntu Linux installed either has a host OS or on your desktop PC.A remote debugging tutorial; which I consider to be the continuation of this tutorial, can be found .So what is a cross compiling toolchain and why use one ?A native compiler such as the default gcc tool on Kubuntu is a compiler that runs on an Intel machine, as well as creates binaries intended to be run on an Intel machine. i.e it creates binaries for the same type of machine that it runs on. Similarly the GCC tool in the RPi’s Raspbian Linux OS is intended to run on an ARM machine as well as creates binaries for an ARM machine.A cross compiler such as the “arm-linux-gnueabihf-gcc” that we will use is able to run on an Intel machine but creates binaries for an ARM machine. In other words, it runs on one architecture and creates binaries for another. This allows us to develop and compile our programs on our Desktop PC but when it comes to deploying the binaries we deploy them and run them on the Raspberry Pi.So why use a Cross-compiler instead of developing our code and compiling it natively on the Raspberry Pi itself? After all, the Raspberry Pi has a native GCC compiler. We can also use code editors such as nano or vi from the command line (remotely over SSH) or GUI programs such as Geany (remotely over VNC).The main case for cross-compilation over native compilation (develop and compile on the RPi itself) is that it tends to be faster. Remember the RPi board may be fast compared to a microcontroller…but its still has limited RAM resources and is pretty slow compared to an average desktop computer….Also you have a myriad of development tools that you can use on your desktop PC that you simply can’t use on the Raspberry Pi; such as the Eclipse IDE.Now that I’ve explained the why…let’s get started!Downloading and Setting Up the Cross Compiling ToolchainOpen a terminal window on your desktop side Kubuntu/Ubuntu Linux OS and type the following command: “sudo apt-get install git“. This will install the GIT tool on your desktop linux box which in turn will enable us to download / clone the cross compiling toolchain from .If you’re running a 64-bit Ubuntu/Kubuntu Linux OS you will probably also want to install the 32-bit library/header files. Since the cross compiler will need them to properly run. You can do this by typing “sudo apt-get install ia32-libs“. Again this step is only required if you are running a 64-bit Linux OS. Once git is installed, create a “raspberrypi” directory in your home directory by typing “mkdir raspberrypi“.Go to the raspberrypi directory by “cd raspberrypi” and then type: “sudo git clone git:///raspberrypi/tools.git“This command will download (clone) Raspbian’s official cross compiling toolchain from Github. The command will take a few minutes to complete its task.When the previous command completes, navigate to “/home/halherta/raspberrypi/tools/arm-bcm2708″ using “cd ~/raspberrypi/tools/arm-bcm2708” on your Deskop Linux OS.In the arm-bcm2708 folder you’ll see three other folders each containing a separate toolchain:1. arm-bcm2708-linux-gnueabi2. arm-bcm2708hardfp-linux-gnueabi3. gcc-linaro-arm-linux-gnueabihf-raspbianOf those three we will use the third one. The next step is to add the directory containing the binary files of the third toolchain “gcc-linaro-arm-linux-gnueabihf-raspbian” to the PATH environment variable in linux. This way we can access the toolchain’s binary files from anywhere on our computer. We will do this by adding an “export PATH” command to the bottom of the .bashrc and .profile files in the home directory.In a terminal window (on your Desktop Linux OS) type “cd ~/“ to point to the home directory, then type “nano .bashrc“. This will open the .bashrc file in a command line based editor called nano. Go to the bottom of the .bashrc file using the down arrow key. Then type the following command:“export PATH=$PATH:$HOME/raspberrypi/tools/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian/bin”Then hit Ctrl+x to exit. You will be prompted to save changes. Say yes and hit “Enter”.Similarly in our home directory type “nano .profile“. This will open the .profile file in the command line editor nano. Go to the bottom of the .profile file using the down arrow key. Then type the same command again:“export PATH=$PATH:$HOME/raspberrypi/tools/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian/bin”Then hit Ctrl+x to exit. You will be prompted to save changes. Say yes and hit “Enter”.Now restart your machine. (You probably could just log out and log in again)Ideally you need to export the toolchain’s directory path to the PATH variable in either the .bashrc or the .profile files. This didn’t work for me. If it works for you thats great.When you log-in into your desktop Linux OS, open a new console window and type: ” arm-linux-gnueabihf-gcc -v”. If you were successful you should see output similar to that in Figure 1. Congratulations! you just installed Raspbian’s official cross compiling toolchain on your Desktop PC / Virtual Machine!Figure 1. Cross Compiling Toolchain successfully installed and accessible from anywhere within your Desktop side Linux OSDownloading and Setting Up EclipseThe Next step is to download and install Eclipse. Unfortunately as of this writing the apt-get repositories have yet to contain the latest Eclipse build…Eclipse Juno. So we will not be using the apt-get package manager. Instead we will download the latest Eclipse IDE from the web using a web browser. Before we can run eclipse, we need to ensure that we have a Java runtime environment installed; since eclipse relies heavily on Java. We can do this with the following command: “sudo apt-get install openjdk-7-jre“Go to the link provided below and download the linux version of the Eclipse IDE (Juno) for C/C++. Download the 32-bit version of the IDE if you’re running a 32-bit Linux OS or download the 64-bit version of the IDE if you’re running a 64-bit Linux OS.Link:If you’re not sure whether you’re running a 64-bit or 32-bit Linux OS, open a terminal window and type” uname -a“. If the output of that command contains “i686″ or “i386″, you’re running a 32-bit Linux OS. If in the output you see “x64″ then you’re running a 64-bit Linux OS.The next step is to extract the “eclipse” folder into our home directory from the eclipse-cpp-juno-linux-gtk.tar.gz compressed file. This can be easily done using the Dolphin File Manager. Navigate to the directory in which “eclipse-cpp-juno-linux-gtk.tar.gz” was downloaded. Click on the file. This will open a decompression tool. Click on extract and choose to extract to the /home/halherta directory. Alternatively open a new console and navigate to the directory containing the .gz file then type: “tar -xvzf eclipse-cpp-juno-linux-gtk.tar.gz -C ~/“. Either way you will end up having the eclipse directory created in your home directory. To start eclipse, go to the home directory “cd ~/” then ‘cd’ your way into the eclipse folder “cd eclipse” then type“./eclipse &“.If you have been following my series of tutorials from scratch and/or are running Kubuntu, you can enable starting eclipse from the start menu right click on the blue KDE start menu button and click on “Edit Applications”. This will open the KDE Menu Editor.Select on the “Development” tab in the right of the window and then click on the “new item” button. A message box will pop-up. Enter under “item name”: “Eclipse Juno for C/C++ Developers”. Then click on the “open file dialog” adjacent to the “command field” and select the eclipse binary which should be “/home/halherta/eclipse/eclipse”. Furthermore, click on the icon box. This will open an icon source box select the “other icon” option and then click on the browse button. Browse to the “/home/halherta/eclipse/” folder and then select the “icon.xpm” file.Figure 2. Choose “Other Icons” and hit “Browse” button to select “icon.xpm” file in the eclipse directoryAfter these changes the KDE Menu Editor window should look like the illustration shown in Figure 3.Figure 2. Choose “Other Icons” and hit “Browse” button to select “icon.xpm” file in the eclipse directoryFinally click on the “Save” button and then close the KDE Menu Editor. If you now navigate the KDE menu, you should find eclipse under “Applications->Development”. If you click on it the Eclipse IDE should start.Note if you’re running Ubuntu (without Unity…just gnome classic) you can right click on the “Applications Menu” and select “Edit Menu” to edit your gnome-based Ubuntu start menu and add to it an entry for eclipse in a similar manner as demonstrated above. And don’t ask me about Ubuntu Unity integration..I hate it.Creating a New Project in EclipseWhen Eclipse runs, it will first launch the workspace launcher. You will be prompted to choose a workspace directory. Accept the default. Feel free to check the “Use this as the default and do not ask again” option if you feel inclined to do so. (You can always switch/change the workspace directory by going to “File->Switch Workspace” ).Figure 4. Workspace launcherYou should then see a Welcome Tab (Figure 5). Click on the ‘x’ on the Welcome tab to close itFigure 5. Welcome Tab. Click on the ‘x’ in the tab to close itNow go to File->New->C++ Project. This will open the “C++ Project” window shown in Figure 6.Figure 6. C++ Project WindowType “HelloWorld” in the “Project Name” field. Under Project type select “Executable->Empty Project” Under “Toolchains” select “Linux GCC”. Then click on “Next” This should take you to the “Select Configurations” Window. Accept the defaults and click “Finish”.This should be the end of the basic project configuration. Your Eclipse Environment should look as shown in Figure 7.Figure 7. New Hello World Project initial setupNotice how this project does not have any source files so lets add one. Click on “File->New Source File”. This should open the “New Source File”window.Figure 8. New source File Window.Ensure that the “Source folder” and “Source file” fields include “HelloWorld” and “HelloWorld.cpp” respectively as shown in Figure 8 and click Finish. This will add a HelloWorld.cpp source file to our project. In the source file type the following basic C++ code:/** HellWorld.cpp** Created on: 2012-09-27* Author: halherta*/#include <iostream>using namespace std;int main (void){cout << "Hello RPi Development World !"<< endl;return0;}Save your project by clicking on “File->Save”.Now we will need to access the Project properties to ensure that the correct compiler (the Raspbian cross compiler) and its header and library files are being used. To do this select the “HelloWorld” folder/project in the project explorer and then click on project properties. This will open the “Properties for HelloWorld” window.Figure 9.First go to “C/C++ General -> Paths and Symbols” from the left hand side navigation bar. In the “Includes” Tab make sure that all the include pathsincluded in Figure 9 are added.Then go to the “Library Paths” and make sure that all the library paths in Figure 10 are added.Figure 10. Library Path for the Cross CompilerFinally go to “C/C++ Build -> Settings” (Figure 11) from the left hand side navigation bar. Under the “Tool Settings” Tab select “GCC C++ Compiler” for that Tab’s Navigation bar and ensure that the command field contains: “arm-linux-gnueabihf-g++”Similarly the command field for the “GCC C Compiler” should contain “arm-linux-gnueabihf-gcc”Similarly the command field for the “GCC C++ Linker” should contain “arm-linux-gnueabihf-g++”And finally the command field for the “GCC Assembler” should contain “arm-linux-gnueabihf-as.Figure 11. C/C++ Build->SettingsThen click on the Apply and OK buttons. At this point the Eclipse IDE is configured to utilize the Raspbian cross compiler.To build the project click on “Project->Build Project”. To clean the project click on “Project->Clean”. Figure 12 shows the Eclipse workspace with the HelloWorld program successfully cross compiled for the Raspberry PiFigure 12. HelloWorld program successfully compiled for Raspberry Pi.The binary file for our HelloWorld application resides in the “~/workspace/HelloWorld/Debug”. Lets go there via a console window with cd “cd~/workspace/HelloWorld/Debug/“. If we type in “ls -al” we’ll find that our Binary file is highlighted in green and is called HelloWorld. If I try to run it with “./HelloWorld” I get the following error message “cannot execute binary file“. Now if I type “file HelloWorld“, I get the following output: “HelloWorld: ELF 32-bit LSB executable, ARM, version 1 (SYSV), dynamically linked (uses shared libs), for GNU/Linux 2.6.26,BuildID[sha1]=0xb37e6eaa466429d015cc334d55f5d46c97c9fc6c, not stripped“. This indicates that the HelloWorld Binary File was compiled for a 32-bit ARM machine and cannot run on an Intel Machine.Deploying the Binary file onto the Raspberry PiTo deploy the binary to the Raspberry Pi, make sure that the RPi board is powered and connected to your network. The next step is click on “Window->Show View->Other”. This will open a show view window. In this window select the “Remote Systems” folder and then select “Remote Systems Details” and press OK (Figure 13).Figure 13. Remote system viewIf the “Remote Systems Details” shows up in the bottom of the workspace, drag it such that its tab shares the same region as the project explorer tab as shown in Figure 14.Figure 14.Now right click in the “Remote Systems Detail” area and click on “New Connection”. In the “Select Remote System Type” window (Figure 15), select “SSH only” then click “Next”Figure 15.In the “Remote SSH Only System Connection” type in the IP address of the RPi in the “Host name” field and give the connection a valid name in the “Connection name” field. I typed “RaspberryPi”. Then click “Finish”.Figure 16.At this point a second device (Raspberry Pi) shows up in the “Remote Systems Detail” tab. Right click on the Raspberry Pi resource and click connect. You will be prompted to enter the username and password. Make sure that you utilize “username:pi” and “password:raspberry” (if you haven’t changed the default password). You may get a warning windows asking you if you are sure that you want to accept this connection. Affirm that you want to proceed with the connection. At this point you should be connected to your RPi from eclipseFigure 17.Right click on the Raspberry Pi resource again in the “Remote Systems Detail” tab and click on the “Show in Remote Systems View”. This will open a “Remote Systems” tab in the same region of the workspace. In this tab, one can navigate the root file systems of both the Kubuntu (local) OS and that of the Raspbian/Raspberry Pi.Locate the HelloWorld Binary file on our local desktop PC and drag it to the home directory on the Raspberry Pi. This effectively copies the Binary file to the home directory of the Raspberry Pi.Figure 18.Now right click on the SSH terminal icon under the Raspberry Pi icon in the “Remote Systems” and select “Launch Terminal” . This should launch a terminal window in the bottom of the Eclipse workspace (Figure 19). This is basically a console / terminal window connected to the Raspberry Pi via SSH.Figure 19.In the terminal window type “ls -al” to confirm that the “HelloWorld” binary indeed got copied into the home directory of the Raspberry Pi’s root file system. Then change the “HelloWorld” binary’s permission to make it executable: “chmod +x HelloWorld“Finally type “./HelloWorld“. You should see the output shown in Figure 19. :“Hello RPi Development World !”Congratulations You just developed and ran your first cross compiled application for the Raspberry Pi.!To remotely debug your applications on the Raspberry Pi from Eclipse, check out。
PowerPC交叉编译环境安装指南

在虚拟机下建立PowerPC交叉编译器的步骤/estou 张柬 estou.jar@1. 安装好虚拟机,Linux操作系统,实际安装虚拟机为VMware Workstation ACE 版 6.02 build-59824,操作系统为Fedora 8,内核版本为2.6.232. 首先到http://ftp.denx.de/pub/eldk/下载所需要的eldk安装文件,选择所需要的版本以及对应的目标CPU类型,下载相应的iso文件,实际下载的eldk版本为4.2,在/pub/eldk/4.2/ppc-linux-x86目录下载,由于目标CPU为PowePC8560,下载的版本为ppc-2008-04-01_freescale.iso.3. 下载后将iso文件拷至虚拟机Linux环境下(没有尝试过直接在Linux下下载~~),由于文件太大(1.4GB),最好将iso文件拷至Windows下Fat32格式的硬盘中,再将其copy至Linux中.对于拷贝的方式,如果安装了相关的虚拟机工具,可以直接从Windows拖至Linux,若没有装VMtools,则就只能通过文件共享的方式拷贝文件.由于拷贝方式应该不是DMA方式,复制速度会有点小慢,咱用了一个下午才拷贝完全.如果复制过程中出现错误,建议静下心来重新弄几次.4. 我是将iso文件拷贝至/mnt/share目录下,该目录可随意设置.文件拷贝完全后,可以正式开始进行安装.为了避免权限问题,建议直接在root用户下安装~~~前面都是废话5. 创建虚拟光驱挂载点.所谓挂载点,其实就是在安装的时候把该点作为虚拟光驱的目录.在root目录下使用mkdir /mnt/cdrom创建虚拟光驱挂载点,若光驱挂载点已创建,即在/mnt目录下已经有了一个叫做cdrom的文件夹,该步骤可以免去.也可以直接通过点击鼠标右键的方式新建该文件夹.6. 加载光驱.挂载点创建后,即可以加载光驱.通过如下命令mount -t iso9660 /dev/cdrom /mnt/cdrom加载光驱,在上述命令中,iso9660是cdrom的标准格式.这时,可以通过cd /mnt/cdrom查看cdrom 中的内容,由于fedora系统也是通过虚拟光驱加载的,故可以在cdrom中看到其相应的iso文件.由于此时并没有把交叉工具链的iso文件放入光驱,此时在cdrom中看不到安装文件.通过cd命令回到root目录.7. 将eldk安装iso文件放入光驱.通过如下命令mount -o loop /mnt/share/ppc-2008-04-01_freescale.iso /mnt/cdrom将刚才拷贝的eldk安装文件放入光驱.此时,再查看/mnt/cdrom目录,ls一下,将会看到eldk 安装iso文件已加载至光驱,cdrom里面已罗列了该安装iso文件中包含的处理器支持版本,我需要安装的版本为ppc_85xx.用cd 命令回到root目录下.8. 安装.进入光驱挂载点,即进入通过cd /mnt/cdrom进入iso文件所在目录.通过./install -d /home/estou/ppc8500/eldk/ ppc_85xx命令安装eldk.其中/home/estou/ppc8500/eldk/为我的安装目录,即把eldk安装到该目录下,可以随意选择.ppc_85xx为我的安装版本,这个的根据你的实际目标板而定.安装过程会花费你一点点时间,耐心等待一下~~~安装完后约1.4GB9. 安装完毕要设置相关的环境变量.在Windows下安装编译器时,IDE会帮助你设置好相关的环境变量,但这里需要手动的设置.从刚才的/mnt/cdrom回到root目录下.通过ls -a命令找到.bashrc文件,在该文件中包含相关的bash shell配置信息.通过gedit .bashrc,也可以使用vi打开该文件.在该文件中添加如下内容:CROSS_COMPILE=ppc_85xx-PATH=$PATH:/home/estou/ppc8500/eldk/usr/bin:/home/estou/ppc8500/eldk/binexport CROSS_COMPILE PATH保存文件退出.在root目录下执行source .bashrc命令.10. 至此,eldk交叉编译环境建立完成~~最好重启一下,用这种方式来保护一下持续受伤的眼睛~~可以通过ppc-linux-gcc -Wall -g -o hello hello.c或者powerpc-linux-gcc -Wall -g -o hello hello.c命令来进行编译了~~~eldk交叉编译环境胜利完工~~~~~~~~~~~~~其实事情还远没有结束~~~还需要进行PowerPc Linux内核的编译,以及对NFS文件系统进行配置....当这一切都宣告结束时,PowerPC的交叉编译环境才真正的建立起来~~~不过,这些并不是本指南需要考虑的内容~~~~~~~~~~~。
使用交叉编译编译在OpenWRT上运行的程序

使用交叉编译编译在OpenWRT上运行的程序首先下载OpenWrt-SDK-Linux-i686-1.tar.bz2包,解压缩tar jxf OpenWrt-SDK-Linux-i686-1.tar.bz2为了方便,可以做个链接ln -s /root/OpenWrt-SDK-Linux-i686-1/staging_dir_mipsel/bin/mipsel-linux-uclibc-gcc/usr/bin/mepsel-gcc然后使用/root/OpenWrt-SDK-Linux-i686-1/staging_dir_mipsel/bin/mipsel-linux-uclibc-gcc来编译你的程序就可以了,有Make文件的,可以修改Make文件的CC行,使用mepsel-gcc编译。
有人跟我问,说链接的时候可能出错,我编译的都是简单的程序,实际上对于大型源码,需要链接的,请参考网上一个达人的编译办法Debian 下编译OpenWrt 和使用搭建交叉编译环境(buildroot)编译OpenWrt后也就有了交叉编译需要的工具链(ToolChain),工具链其实在官方DownLoad是可以直接获取到的.我们是在虚拟机下做这些的,首先给Debian更新一下sshd以便我们能方便操作。
su -注销光盘源(vi /etc/apt/sources.list 然后在光盘源前加个#)apt-get updateapt-get install ssh openssh-server更新OpenWrt编译环境所需的软件包。
apt-get install build-essential bison flex zlib1g-dev libncurses5-dev subversion quilt intltool ruby fastjar unzip gawk可以开始了。
cd /usr/srcsvn co svn:///openwrt/branches/backfire/经过一段时间后,从官方SVN仓库获得用于编译最新发行版backfire的脚本。
2、交叉编译器的安装与使用

。
2
交叉编译器
பைடு நூலகம்
在一种平台上编译出能在另一种平台(体系结构不同)上运行的程序。 在PC 平台(X86 CPU)上编译出能运行在arm 平台上的程序,编译得到的 程序在X86 CPU。 X86平台上是不能运行的,必须放到arm 平台上才能运行。 用来编译这种程序的编译器就叫交叉编译器。 为了不跟本地编译器混淆,交叉编译器的名字一般都有前缀。例如: arm-linux-gcc。 需要交叉开发环境(Cross Development Env)的支持是嵌入式应用软 件开发时的一个显著特点。 交叉编译器只是交叉开发环境的一部分。 交叉开发环境是指编译、链接和调试嵌入式应用软件的环境,它与运行 嵌入式应用软件的环境有 所不同,通常采用宿主机-目标机模式。
4
交叉编译器环境搭建
5
交叉编译器环境搭建
6
交叉编译器的安装
7
GNU gcc编译器及其使用
C 、C++源代码 编译 连接
可执行程序
hello.c
GNU gcc编译器的编译流程
gcc hello.c -o hello_pc // 用gcc编译器编译hello.c源程序, //生成可以在X86 CPU上的可执行程序hello_pc arm-linux-gcc hello.c -o hello_arm // 用arm-linux-gcc交叉编译器, //生成可以在arm s3c2440 CPU上的可执行程序hello_arm
9
gcc –c main.c(生成main.o目标文件) gcc –c A.c(生成A.o目标文件 ) gcc –c B.c (生成B.o目标文件 ) gcc –o main main.o A.o B.o 最后根据main.o、 A.o 、B.o这3个目标文件, 才能生成main可执行二进制程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
miniupnpc交叉编译
交叉编译是一种将编译器从一个平台编译出的代码转换为另一个平台的工具。
MiniUPnP-C是一款用于UPnP协议的开源库,可以在多种平台上使用。
本文将介绍如何使用交叉编译工具链来编译MiniUPnP-C 库,以便在目标平台上运行。
一、准备工作
1. 确保已经安装了交叉编译工具链,如Linux下的GCC交叉编译工具。
2. 下载MiniUPnP-C库源码,并解压到本地目录。
二、编译过程
1. 进入MiniUPnP-C源码目录,并打开终端。
2. 执行以下命令来配置编译环境:
```bash
./configure --host=<target_arch> --prefix=<install_dir>
```
其中,<target_arch>是目标平台的架构,如arm-linux-gnueabi;<install_dir>是安装目录。
3. 执行以下命令来编译MiniUPnP-C库:
```bash
make
```
4. 执行以下命令来安装MiniUPnP-C库:
```bash
make install
```
三、示例代码
下面是一个简单的示例代码,演示如何在目标平台上使用MiniUPnP-C库。
假设我们已经成功安装了MiniUPnP-C库,并且目标平台是ARM架构的Linux系统。
```c
#include <miniupnpc/miniupnpcapi.h>
#include <stdio.h>
#include <string.h>
int main() {
struct UPnPDev *dev;
dev = miniupnpc_getdefaultdev();
if (dev == NULL) {
printf("Failed to get default UPnP device.\n");
return 1;
}
// TODO: 在这里调用MiniUPnP-C库的其他功能,例如开启端口映射等操作。
printf("Successfully initialized UPnP.\n");
return 0;
}
```
四、注意事项
1. 在交叉编译时,需要指定目标平台的架构和安装目录。
在上述示例代码中,<target_arch>表示目标平台架构,可以是arm-linux-gnueabi、i686-linux-gnu等;<install_dir>表示安装目录,可以是自定义的目录路径。
具体的架构和目录要求可能会因不同的目标平台而有所不同,需要根据实际情况进行调整。
2. 在编译过程中,可能会遇到各种错误和问题。
需要仔细阅读错误信息,并根据实际情况进行调整和解决。
例如,可能需要调整编译器选项、链接器选项、库文件路径等。
3. 在使用MiniUPnP-C库时,需要了解UPnP协议的相关知识,以便正确使用库中的功能。
同时,还需要了解目标平台的网络环境和相关配置,以便正确开启端口映射等操作。
4. 在实际应用中,还需要考虑一些安全性和稳定性问题。
例如,需要确保端口映射等操作不会对目标平台的网络环境造成影响,需要定期检查和更新库文件等。
总之,交叉编译是一种非常有用的技术,可以帮助开发者在不同的平台上运行代码。
通过正确配置和使用交叉编译工具链,可以轻松地将MiniUPnP-C库编译为适合目标平台使用的版本,从而在多个平台上实现UPnP协议的功能。