基于FNN的联合收割机故障诊断系统研究_陈进
联合收割机技术检查与调试探析
1 ) 收割台的检查与调整。收割台的检查与调整
的 内容包 括 拨 禾轮 、 切割 器 、 割 台搅 龙 和倾 斜 输 送器 等 部 分的检 查 与调整 。 2 1 拨 禾轮 的检 查与 调 整 项 目主 要 是拨 禾 轮 的 速 度 和 高度 。 当割 直立 作物 时 , 拨合轮 的圆周 速度球铰上卸下, 转动球铰 , 改变 连杆 长度 从而 达 到控 制割 刀 行程 的 目的 。切割 器 的间隙应根据收割机 的型号, 参照使用说明书具体
进 行调 节 。
2 01 3
农机
N ONG J I
.
使 用与 维护
4 ) 割 台搅龙 和倾 斜 输送 器 的检 查 与 调整 项 目主 要 是 搅龙 与底 面 间 隙及 搅龙 转 速 的大 小 。一般 情 况
带 的磨损 。 所 以, 当检 查 的紧度 不符 合要 求时 , 应严 格
按 照使用 说 明书 中的规 定进 行调 整 。
6 ) 转 动 部件 是 否灵 活 可 靠 。主 要 是 检 查各 转 动
部件 的运 动是 否灵活 可靠 , 其 转动 轴 的径 向跳动 量 和
轴 向窜动量 是 否在 允许 的范 围 内。
1 . 2 对 收割 台、 脱 粒装 置等 收割 机特 殊部位 的检 查
1 ) 机器 各 部 件 安装 位 置 的 正确 性 。保 证机 器 各 部 件之 间相 互位 置 的正确 性 , 是联 合 收割机 正 常工 作 的基础 。各 部件 的相 互 位置 如不 正确 , 就 会发 生机 械
故障。
下, 其 间隙 为 6 ~1 2 mm, 具体大 小应视 作物 而 定 。间
修理 , 使其 保持 良好 的技术状 态 。
联合收割机的常见故障与维修处理

N o n g y e j i x i e近年来,我国国民经济水平得到一定程度的提升,其中农业经济作出了不小的贡献,作为农业大国,农业行业是我国社会发展及国家经济建设的重要组成部分,现如今,随着国家对于农业发展的越发重视以及科学技术的日益成熟,农业行业也逐渐朝着机械化、现代化发展,其中联合收割机就是其较为典型的机械之一,该机械的合理应用能够有效提升农业收割质量与效率,并推动农业行业的不断发展,然而实际上,在联合收割机的长期实际应用中,其还是难免会出现一些故障,因此,相关操作技术人员需要加强其常见故障的认知与了解,并不断提升自身对其维修处理的能力,由此有效确保联合收割机的应用高效性,尽可能的延长其使用寿命。
一、联合收割机的结构分析所谓联合收割机,指的就是农业发展中所应用的结构复杂程度相对较高,单功能相对较强的大型机械设备,联合收割机的结构主要是由以下几个部分组成,即割台、控制台、脱粒机、传输带、柴油机等,在日常的作业应用中,其各个部位都较可能会出现故障情况,而较为多发的则为割台。
在应用联合收割机进行收获生产的过程中,主要是借助拨禾轮、切割器、输送装置之间的配合去实现收割目的,首先,由拨禾轮实现对于作物的扶持,从而实现作物的切割操作,有效避免作物倒伏可能造成的浪费,与此同时,还能够确保切割器不存在切割茎秆残留,从而减少设备堵塞及损伤的情况,此后,则在经过相关处理后借由输送搅龙及倾斜输送器实现谷物向脱粒机的运输,在这一过程中,切割器的品质是否达到相关标准会直接影响到割台的收割质量及效率,并且,在实际作业过程中,必须要确保切割刀片以及护刃器之间的对称线重合,且需要严格把控两者之间间隔,由此促进收割工作的顺畅稳定运行。
二、联合收割机应用中常见的故障及维修处理措施1、割台故障①割刀与割台堵塞这一故障是联合收割机应用中非常多发的问题,其的本质是割台割刀位置因为积攒的杂物数量过多,而导致出现堵塞现象,主要原因是该部位的定刀片以及动刀片之间的设置不合理,使得间隙超出标准,造成刀片与护刃器的扭曲变形,或是技术人员操作过程出现失误,致使割刀直接与硬物接触,另外,若收割机运用之前的气候出现多雨潮湿的情况,所收割的作物对象较为潮湿,且在茎秆中携带泥土,由此随着工作时间推移就会使得割刀堵塞。
全喂入联合收割机常见故障分析和处理方法
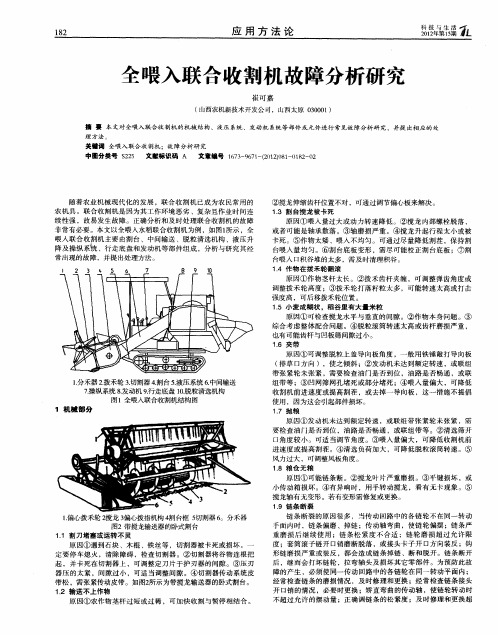
1分 禾 器 .
2拨 禾 轮 .
3切 割 器 .
4割 台 .
5液 压 系 6中 间 输 送 . .
7操 纵 系统 8发 动 机 9行 走 底 盘 . . .
1 . 粒 清选机 构 0脱
一
、
翻 台部分 过多。 处理方法 :①调整拨禾轮位 置 ,降低其高度 ;②向后调整拨 禾轮位置 ;③降低拨禾轮转速。
全 隈入联 合 收割机 常见故障分析 和处理方法
◎ 黎 永 坚
( 州 市农 机推 广 站 梧
530 ) 400
近 几 年 ,随着 国家农 机 购 置 速度较快 ,拨禾轮不能将作物拨 使弹指轴作用在被割作物高度 23 /
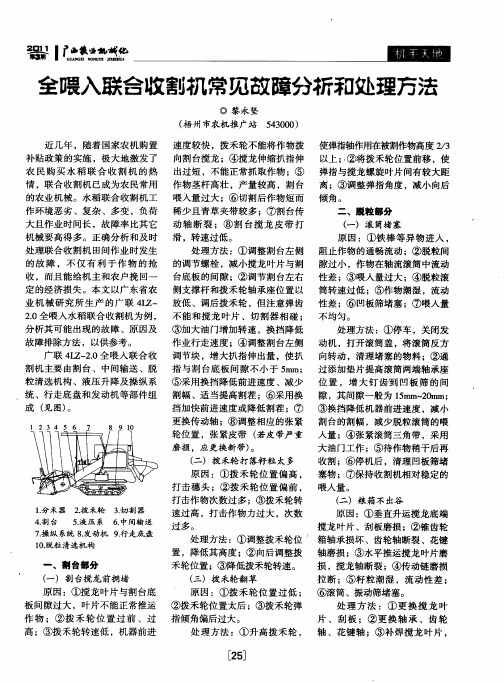
补贴政策的实施 ,极大地激发 了 向割 台搅龙 ;④搅龙伸缩扒指伸 以上 ;②将拨禾轮位置前移 ,使 . 农 民 购 买 水 稻 联 合 收 割 机 的 热 出过短 ,不能正常抓取作物 ;⑤ 弹指与搅龙螺旋叶片 间有较大距 情 ,联合收割机 已成为农 民常用 作物茎杆高壮 ,产量较高 ,割 台 的农 业 机械 。水 稻 联合 收割 机 工 喂人量过大 ;⑥切割后作物短而 作 环 境 恶劣 、复 杂 、多变 ,负 荷 稀少且青草夹带较多;⑦割台传 大且作业 时间长 ,故障率 比其它 动轴 断裂 ;⑧ 割 台搅 龙 皮带 打 机械要高得多 。正确分析 和及时 滑,转速过低 。 处 理联 合 收 割 机 田间作 业 时 发 生 处理方法 :①调整割台左侧 的故 障 ,不 仅有 利 于作 物 的抢 的调 节螺 栓 ,减小 搅 龙 叶 片与 割 收 ,而且 能 给 机 主 和农 户 挽 回一 台底板的间隙;②调节割台左右 定 的经济 损 失 。本文 以广 东 省农 侧支撑杆和拨禾轮轴承座位置以 业 机 械 研 究 所 生 产 的 广 联 4 Z 放低 、调后拨禾轮 ,但注意弹齿 L一 2 全喂入水稻联合收割机为例 , 不能 和搅龙 叶片 、切割器相 碰 ; . 0 分析其可能 出现的故障 、原因及 ③加大油 门增加转速 ,换挡降低 故障排除方法 ,以供参考 。 作业行走速度 ;④调整割台左侧 广 联 4 Z 20全 喂人 联 合 收 调节块 ,增大扒指伸出量 ,使扒 L一. 割机 主要 由割 台 、 中间 输送 、脱 指 与 割 台底 板 间 隙不 小 于 5 m; m 粒 清选 机 构 、液压 升 降 及 操纵 系 ⑤采用换挡降低前进速度 、减少 统 、行走底盘和发动机等部件组 割幅、适当提高割茬 ;⑥采用换 成 ( 图) 见 。 挡加快前进速度或降低割茬 ;⑦ 更换传动轴 ;⑧调整相应的张紧 轮位 置 ,张 紧皮 带 ( 若皮 带严 重 磨损 ,应 更换 新 带) 。 离 ;③调整弹指角度 ,减小 向后 倾角 。 二 、脱粒 部分 ( )滚 筒堵 塞 一
收割机常见故障及维修方法详解
收割机常见故障及维修方法详解每到水稻收割时期,如何确保联合收割机有一个最佳的收割状态,是农机手最为关心的事情。
收割机结构复杂,作业中无论哪一个工作系统出现问题,都会误时误工,还会造成粮食浪费。
因此,机手们除及早做好收获机械的试机、检修和保养之外,还应掌握实际操作中的故障排除技术,这样才能有效提高收割机的经济效益。
切割器刀片损坏:主要是在切割过程中切割器碰到了石块、树根等硬物;护刃器松动或变形,使定刀片高低不一致;刀片铆钉松动,切割时相互碰撞等原因所致。
为预防刀片损坏,操作时应注意避开切割器前面的障碍物;保养联合收割机时,注意正确安装切割器。
刀杆折断:产生刀杆折断的原因,除割刀运动阻力太大外,主要是割刀驱动机构的安装位置不正确。
为预防刀杆折断,应正确调整切割器,使割刀运动阻力减小,同时调整割刀驱动机构安装位置,以达到装配要求。
割台推运器打滑:推运器打滑的主要原因是推运器的螺旋叶片与割台底板的间隙过大。
为预防此故障的发生,应根据作物的稀密、高矮等不同情况,正确调整好螺旋叶片与割台厢板的间隙。
当收割低矮作物时,可将间隙调小至10毫米左右。
当螺旋叶片边缘磨光时,可用键刀在叶片边缘上制出小齿,恢复和增加推送能力。
滚筒堵塞:引起滚筒堵塞的原因很多,如滚筒间隙过小;发动机马力不足,传动带打滑,使滚筒转速不够;逐镐轮和逐镐器转速不够,茎秆排出不畅;作物太湿、太密;韧性杂草过多,收割机行走速度过快等。
为了预防滚筒堵塞,在收割多草潮湿作物时,应适量增大滚筒与凹板的间隙;当听到滚筒转速下降音时,应降低机车前进速度或暂时停止前进;调整传动带的紧度;正确调整滚筒的转速和逐镐器木轴承的间隙。
链条断裂:链条断裂的原因也很多,如传动回路中的各链轮不在同一转动平面内;传动轴弯曲;链条严重磨损后继续使用;链条松紧度不合适;链轮磨损超过允许限度;套筒滚子链开口销磨断脱落,或接头卡子开口方向装反;钩形链磨损严重或装反等,都会造成链条掉链、断裂和脱开。
全喂入联合收割机故障分析研究
柴 油是 复 杂 的碳 氢 化合 物 ,喷入 燃 烧室 内未燃 烧 的 柴油 受高 温 分解 ,形成 炭 黑 ,排 气 时随 同废 气 一 起排 出形成 黑 烟 。他 是燃 烧 燃料 不 完全 的表 现 。其主 要 原 因① 活 塞 、汽 缸套 等 磨 损 ;② 喷
原 因① 系统 超载 ,主要 表 现 在压 力 或转 速 过 高 ;② 油液 清 洁 度 差 , 内部 磨 损 加 剧 ,使 容 积效 率下 降 ,油 从 内部 间 隙 泄 漏 节 流 而 产 生 热 量 ;③ 出油 管 过 细 ,油 流 速过 高 ,一 般 出油 流 速 为
台喂人 口积谷 堆 的太多 ,需及 时 清理 积谷 。 1 作 物在 拨 禾轮翻 滚 . 4
原 因① 作 物茎 杆 太 长 。②拨 禾齿 杆 夹缠 ,可 调整 弹 齿角 度 或 调 整拨 禾 轮 高度 ;③拨 禾轮 打 落 籽粒 太 多 ,可 能 转速 太 高 或打 击 强 度高 ,可 后移拨 禾轮位 置 。 1 小 麦成 糊 状 ,稻 谷里 有大 量米 粒 . 5 原 因① 可 检查 搅 龙 水平 与 垂 直 的间 隙 。②作 物本 身 问题 。③ 综 合考 虑 整 体配 合 问题 。④ 脱 粒 滚筒 转 速太 高 或 齿杆 磨 损 严重 , 也有 可能 齿杆 与 凹板筛 间 隙过 小 。
巍蟊
应用 方 法论
1 8 3
过磨 损 限度 的链 轮 ,正 确调 整安 全离 合器 ;及 时润 滑传 动链条 。
2 液 压部 分 21 泵 不 出油 .
31 起 动 系统故 障 . . 机械 因素 和外 部 条件 均会 导 致 柴 油机 曲轴 根本 不 转 动或 者转 动速 度 太慢 ,起 动 转速 太低 ,从 而满 足 不 了柴 油机 起 动 。原 因① 起 动 马 达 损 坏 或 者 有 故 障 ,均 造 成 马达 不 转 ,或 者 起 动力 矩 太 小 ,从 而 带不 动 曲轴旋 转 或者 旋转 很 慢 ,达 不 到柴 油 机 的最 低起 动 转速 要 求 。② 电马达 起 动时 ,当 蓄 电池容 量 不够 ,将 导致 起动 马 达转 动 力矩 太 小 ;电源 导线 截 面太 小 或导 线 过长 、导 线接 头接 触 不 良 ,都将 导 致 电能 损 失过 大 ,使 电马达 的转动 力 矩 太小 ,从 而 使柴 油 机 曲轴 转 动很 慢 ,达 不 到柴 油 机最 低 起 动转 速 ;③ 电 马 达 起 动 时 ,起 动 开关 。继 电器 等 零 部件 损 坏 ,将 使 电 马 达根 本 不 转 动 。④柴 油 机 拉缸 、抱缸 或烧 瓦 、抱轴 、运 动件 卡 住 ,均会 造 成柴 油 机摩 擦 功 太大 ,以致 起 动 马达 的力 矩 克服 不 了这种 摩擦 功 ,从而 带不 动 曲轴旋 转或 者转 动太 慢 。
玉米果穗联合收获机常见故障及排除方法

玉米果穗联合收获机常见故障及排除方法1. 引言1.1 背景介绍玉米果穗联合收获机是一种用来收割玉米果穗的设备,其高效的工作方式极大地提高了农民的收割效率和节约了人力成本。
随着使用时间的增长,这些收割机器也会出现各种故障,影响到其正常工作。
了解并解决这些常见故障是非常重要的。
在日常使用中,玉米果穗联合收获机可能会出现各种故障,包括电路故障、机械故障、传动系统故障、润滑系统故障以及操作问题。
对于这些故障,我们需要及时发现并采取相应的措施予以解决,以确保机器的正常运转和延长其使用寿命。
在本文中,我们将重点介绍玉米果穗联合收获机常见故障及排除方法,希望能够帮助农民和使用者更好地了解这些收割机器的运作原理,及时排除故障,提高工作效率。
通过总结反思和展望未来,我们也希望能够为该领域的技术发展和应用提供一些借鉴和思路。
1.2 问题意义玉米果穗联合收获机是农业生产中常见的机械设备,它的使用对提高玉米的收割效率和质量具有重要意义。
在使用过程中,常常会遇到各种故障问题,影响机器的正常运行。
及时了解和解决玉米果穗联合收获机的常见故障是非常重要的。
问题的意义在于,通过深入了解玉米果穗联合收获机的故障原因及排除方法,可以帮助操作人员更有效地维护和保养设备,减少因故障导致的停机时间和生产损失。
对于生产厂家和技术人员来说,掌握玉米果穗联合收获机常见故障及排除方法,可以指导产品改进和设计,提高设备的稳定性和可靠性。
通过本文针对玉米果穗联合收获机的常见故障及排除方法进行探讨,旨在帮助用户更好地了解和处理设备故障,保障设备的正常运行,进一步提高农业生产效率和质量。
2. 正文2.1 电路故障及排除方法电路故障是玉米果穗联合收获机常见的问题之一,主要表现为电路中某些部件的故障或连接问题导致机器无法正常运行。
下面将介绍几种常见的电路故障及排除方法:1. 电路短路:当电路中某些线路短路时,会造成机器无法正常工作。
此时需要通过检查电路连接是否松动或接触不良来确定问题所在,然后修复或更换受损的部件。
联合收割机自动报警系统的设计

广 泛 应 用 于 点 温 、表 面 温 度 和 温 度 场 的测 量 。发 动
使 操 作 者 能 随时 掌握 某 些 工 作 部 件 的运 行 情 况 ,及 时 调 整 机 器 的工 作 条件 和 参 数 ,降 低 联 合 收 割 机 的
图 2 测 温 电 路 原 理 图
图 1 转 速 测 量 原 理 框 图
13 粮 仓 装 载 量 传 感 器 及 工 作 原 理 .
12 水 温 传 感 器 .
粮 仓 装 载 量 传 感 器需 要 在 粮 仓 满 与 不 满 时 能 向 外 提 供 不 同 的 电信 号 ,可 采 用 光 电耦 合 器 或 电感 式
传 统 的 联 合 收 割 机 在 使 用 中仅 靠 操 作 者 的感 官
来 观 察 机 器 的工 作 情 况 ,这 是 不 科 学 的 。 最 突 出 的 问 题 是 可 靠 性 差 、发 生 故 障 的频 率 高 。 为 克 服这 种
弊 端 ,在 联 合 收 割 机 上 安 装 自动 报 警 是 必要 的 。 它
组 成。
B为热 敏 电 阻 常 数 ) 。把 热 敏 电 阻 接 入 图 中 R 的 位 ,
置 ,则 电路 输 出 电 压 为 U =R RE ( , 不 同 的 , , 3 /RR ),
被 测 温 度 ( 动 机 水 箱 温 度 范 围 0 ~I 0 )就 有 发 。 O℃ 相 应 不 同 的 电压 ( 0~2 V)输 出 。
故 障频 次 ,延 长 平 均 无 故 障 工 作 时 间 ,从 而 提 高 整 机 的工作效率 。
基于机器视觉的水稻杂质及破碎籽粒在线识别方法

第34卷第13期农业工程学报V ol.34 No.13 2018年7月Transactions of the Chinese Society of Agricultural Engineering Jul. 2018 187基于机器视觉的水稻杂质及破碎籽粒在线识别方法陈进,顾琰,练毅,韩梦娜(江苏大学机械工程学院,镇江212013)摘要:为了解决目前国内联合收获机缺乏针对含杂率、破碎率的在线监测装置的问题,该文提出基于机器视觉的水稻图像采集,杂质与破碎籽粒分类识别方法。
采用带色彩恢复的多尺度Retinex算法增强原始图像,对HSV颜色模型的色调、饱和度两个通道分别设定阈值进行图像分割,并结合形状特征得到分类识别结果。
采用综合评价指标对试验结果进行量化评价,研究表明,茎秆杂质识别的综合评价指标值达到了86.92%,细小枝梗杂质识别的综合评价指标值为85.07%,破碎籽粒识别的综合评价指标值为84.74%,平均识别一幅图像的时间为3.24 s。
结果表明,所提出的算法能够快速有效识别出水稻图像中的杂质以及破碎籽粒,为水稻含杂率、破碎率的在线监测提供技术支撑。
关键词:机器视觉;图像处理;杂质;水稻;破碎籽粒;颜色模型;在线识别doi:10.11975/j.issn.1002-6819.2018.13.022中图分类号:TP391.41 文献标志码:A 文章编号:1002-6819(2018)-13-0187-08陈 进,顾 琰,练 毅,韩梦娜. 基于机器视觉的水稻杂质及破碎籽粒在线识别方法[J]. 农业工程学报,2018,34(13):187-194. doi:10.11975/j.issn.1002-6819.2018.13.022 Chen Jin, Gu Yan, Lian Yi, Han Mengna. Online recognition method of impurities and broken paddy grains based on machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(13): 187-194. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.13.022 0 引 言水稻含杂率、破碎率是衡量联合收获机作业质量的重要标准,根据2013年发布的《水稻联合收割机作业质量》规定,对全喂入式的联合收获机要求收获的水稻含杂率、破碎率均要低于 2.5%[1]。
基于DSP的智能化玉米联合收获机故障监测系统[实用新型专利]
![基于DSP的智能化玉米联合收获机故障监测系统[实用新型专利]](https://img.taocdn.com/s3/m/80298ac23169a4517623a365.png)
专利名称:基于DSP的智能化玉米联合收获机故障监测系统专利类型:实用新型专利
发明人:张琨,曹树坤,曹翀,赵慧颖,王冲,李士壮
申请号:CN201620062050.7
申请日:20160122
公开号:CN205336872U
公开日:
20160629
专利内容由知识产权出版社提供
摘要:本实用新型提供了基于DSP的智能化玉米联合收获机故障监测系统,包括控制端和执行端,控制端包括DSP模块,信号采集及调理模块,故障数据库,ARM模块,显示屏,操作端,报警指示灯,蜂鸣器,远程监控管理系统;执行端包括变速箱控制器,变速箱输出轴,液压控制阀组,割台输入轴液压马达,绞龙输送机液压马达,剥皮机输入轴液压马达,升运器输入轴液压马达,脱粒装置液压马达,清选装置液压马达,七组转速传感器,籽粒箱,压力传感器,液压伺服驱动器,三个伺服液压缸,车体,双轴水平传感器。
本实用新型的有益效果:响应速度快、可靠性高,能有效降低玉米联合收获机故障发生率,更好地实现智能化玉米联合收获机的故障监测和稳定作业。
申请人:济南大学
地址:250022 山东省济南市市中区南辛庄西路336号济南大学
国籍:CN
代理机构:济南誉丰专利代理事务所(普通合伙企业)
代理人:李茜
更多信息请下载全文后查看。
基于ARM的联合收割机远程监测系统设计
基于ARM的联合收割机远程监测系统设计陈进;杨广静;徐凯;陈思【摘要】A remote monitoring system of combine harvester based on ARM is designed to acquire the real -time status of the combine harvester in the operation and to facilitate the data transmission between the operation personnel and the monitoring center .The system uses ARM as the master controller to receive the rotational speeds and forward speed in process of operation , which has the functions of data processing and fault diagnosis .The data remote trans-mission module can adjust the forward speed of combine harvester automatically through the intelligent control algo -rithm of speed difference pattern recognition .The tests show that the system has simple operation , good human-com-puter interaction , strong practicability and high degree of intelligence .%为实时了解联合收割机在作业过程中的状态信息以及方便操作人员与监控中心的数据传输, 设计了一种基于ARM的联合收割机远程监测系统. 该系统以ARM为控制器, 接收联合收割机作业过程中的转速信号以及前进速度, 并对数据进行处理和故障诊断. 同时, 设计了数据远程传输模块以及转速差值模式识别智能控制算法, 自动调节联合收割机的前进速度. 经试验表明, 该系统操作简单、人机交互性好、实用性强、智能程度高.【期刊名称】《电子科技》【年(卷),期】2016(029)001【总页数】6页(P131-135,141)【关键词】联合收割机;ARM;触摸屏;远程传输;模式识别【作者】陈进;杨广静;徐凯;陈思【作者单位】江苏大学机械工程学院,江苏镇江 212013;江苏大学机械工程学院,江苏镇江 212013;江苏大学机械工程学院,江苏镇江 212013;江苏大学机械工程学院,江苏镇江 212013【正文语种】中文【中图分类】TP277.2AbstractA remote monitoring system of combine harvester based on ARM is desig ned to acquire the real-time status of the combine harvester in the operation and to facilitate the data transmission between the operation personnel and the monitoring ce nter.The system uses ARM as the master controller to receive the rotationa l speeds and forward speed in process of operation,which has the function s of data processing and fault diagnosis.The data remote transmission mo dule can adjust the forward speed of combine harvester automatically thro ugh the intelligent control algorithm of speed difference pattern recogniti on.The tests show that the system has simple operation,good human-computer interaction,strong practicability and high degree of intelligence. Keywords combine harvester;ARM;touch-screen;remote transmission;pattern recognition联合收割机作为农业收割的重要工具,不仅可减轻人工作业的压力,同时也可提高收割效率。
基于FNN的联合收割机故障诊断系统研究
基于FNN的联合收割机故障诊断系统研究陈进;龚丽霞;李耀明【摘要】为解决切纵流联合收割机故障诊断过程中输入量的非线性问题,设计基于FNN算法的联合收割机故障诊断系统.传感器采集待测部件的转速值为系统输入值,对输入值进行模糊处理得到模糊输入值,将模糊输入输出作为神经网络的输入输出,在Matlab中对神经网络进行离线训练得到故障诊断规则表,实际使用中只需在PLC中查询规则表即可得到故障诊断结果.实验结果表明:基于FNN的故障诊断系统能很好地解决系统的非线性问题,可以实时反映联合收割机的故障情况,使其尽可能保持高效率的工作状态.【期刊名称】《中国测试》【年(卷),期】2014(040)005【总页数】4页(P77-79,83)【关键词】联合收割机;模糊算法;神经网络;故障诊断【作者】陈进;龚丽霞;李耀明【作者单位】江苏大学机械工程学院,江苏镇江212013;江苏大学机械工程学院,江苏镇江212013;江苏大学现代农业装备与技术教育部重点实验室,江苏镇江212013【正文语种】中文【中图分类】S225.31;S22;TP277;TP183切纵流联合收割机在田间作业时,速度过快会使得喂入量过大从而造成割台搅龙、输送槽、切流滚筒、纵轴流滚筒和输粮搅龙等转动部件的堵塞,影响收割机的作业质量[1-2],基于此,国内外学者在联合收割机智能监测和故障诊断方面做了较多的研究[3-5]。
Geert Craessaerts等[6]设计了基于SOM监督系统和BP网络技术的故障系统,并应用到了荷兰CX联合收割机的传感器故障检测和隔离中,使得检测到传感器故障成为可能。
易立单[7]设计的故障诊断系统,选取了5个参数作为特征向量来对收割机的转轴转速连续变化过程等方面进行监测。
上述研究虽然在故障的提前预警方面有很好的效果,但是由于没有考虑到联合收割机的非线性特性,所以效果不是很理想。
本文提出基于模糊神经网络(fuzzy neural network,FNN)算法建立切纵流联合收割机的堵塞故障诊断模型,将模糊算法和神经网络算法[8-9]相结合,建立联合收割机堵塞故障诊断的各种故障征兆与故障类型之间的非线性映射关系,实现故障诊断和定位,解决联合收割机的堵塞故障诊断问题。
联合收获机前进速度模糊控制系统多目标遗传优化

联合收获机前进速度模糊控制系统多目标遗传优化宁小波;陈进;李耀明;杨广静;吴培;陈思【摘要】针对联合收获机前进速度模糊控制系统参数设计具有主观性,导致作业性能不理想的问题,以切纵流联合收获机样机为研究对象,构建联合收获机前进速度模糊控制系统仿真模型,并建立控制性能和收获性能的优化目标函数来衡量联合收获机的作业性能,利用多目标遗传算法对模糊控制系统的隶属函数和输送槽、割台螺旋输送器和切流滚筒对前进速度的影响因子进行优化.通过对优化前后模型仿真对比和两组田间试验数据分析,表明优化后的控制系统在受外界干扰情况下控制性能得到了较好的保持,收获性能在喂入量变化不大情况下,单位平均损失率分别由1.45%和1.26%降至1.12%和1.14%,联合收获机的总体作业性能得到改善.【期刊名称】《农业机械学报》【年(卷),期】2015(046)005【总页数】7页(P68-74)【关键词】联合收获机;前进速度;模糊控制系统;多目标遗传优化【作者】宁小波;陈进;李耀明;杨广静;吴培;陈思【作者单位】江苏大学机械工程学院,镇江212013;巢湖学院电子工程与电气自动化学院,合肥238000;江苏大学机械工程学院,镇江212013;江苏大学现代农业装备与技术教育部重点实验室,镇江212013;江苏大学机械工程学院,镇江212013;江苏大学机械工程学院,镇江212013;江苏大学机械工程学院,镇江212013【正文语种】中文【中图分类】S225.31联合收获机作业过程中允许损失率和收获效率是衡量联合收获机收获质量的主要因素。
当田间作物条件如作物品种、作物密度等变化时,将直接影响到联合收获机的收获质量。
为了适应田间作物条件的变化,联合收获机必须能相应地改变其前进速度的大小,以保证收获质量。
因此,收获性能良好的联合收获机应在不超过额定喂入量和允许损失率的前提下具有最大的前进速度[1-7]。
现有联合收获机前进速度控制系统一般都采用模糊控制技术。
联合收获机前进速度的模型参考模糊自适应控制系统
联合收获机前进速度的模型参考模糊自适应控制系统陈进;宁小波;李耀明;杨广进;吴培【摘要】以切纵流联合收获机为研究对象,设计了一种基于联合收获机前进速度的模型参考模糊自适应控制系统,建立了融合多个变量的自适应控制参考模型和模糊控制规则.研制了联合收获机前进速度控制装置,并进行了田间水稻收获试验.试验表明,与普通模糊控制相比,所设计的模型参考模糊自适应控制系统可以实现对联合收获机的自适应控制,能够有效地降低操作人员的作业强度,提高田间收获效率.【期刊名称】《农业机械学报》【年(卷),期】2014(045)010【总页数】6页(P86-91)【关键词】联合收获机;前进速度;模型参考;模糊自适应控制【作者】陈进;宁小波;李耀明;杨广进;吴培【作者单位】江苏大学机械工程学院,镇江212013;江苏大学机械工程学院,镇江212013;江苏大学现代农业装备与技术教育部重点实验室,镇江212013;江苏大学机械工程学院,镇江212013;江苏大学机械工程学院,镇江212013【正文语种】中文【中图分类】S225.31引言联合收获机前进速度是直接影响联合收获机作业质量和收获效率的主要控制参数,性能良好的联合收获机应该在不超过额定喂入量和允许损失量的前提下具有最大的前进速度[1-7]。
目前,国内外农机研究人员在联合收获机前进速度的自动控制方面已作了不少研究,取得了较多的研究成果[8-14],但基于参考模型通过对联合收获机多个工作部件数据监测的融合来实现控制前进速度的研究尚不多见。
本文以模型参考模糊自适应控制理论为基础,设计了以单片机为控制器通过对多个变量的融合实现前进速度的自适应控制,以保持联合收获机获得均匀合理的喂入量,使联合收获机主要工作部件负荷稳定,以获取最佳脱粒质量和最大前进速度,同时减轻操作人员的作业强度。
1 控制系统的结构及工作原理联合收获机前进速度自动控制系统总体结构如图1所示,整个系统由手动-自动切换系统、传感系统、控制器、前进速度控制执行系统、液晶显示系统、声光报警系统和调理电路组成。
基于Android手机的联合收获机主要部件工况监测系统
基于Android手机的联合收获机主要部件工况监测系统陈进;王学磊;王一帆
【期刊名称】《农业机械学报》
【年(卷),期】2016(047)0z1
【摘要】设计了一种基于物联网Android手机的联合收获机主要部件工况信息监测系统.主要通过C8051F020微处理器外接多霍尔传感器,实现对联合收获机主要工作部件如脱粒滚筒转速、输送器转速等关键信息获取,通过物联网平台由Android智能手机实现对数据的实时接收.通过在单片机中采用基于目标信号瞬时变化趋势的故障诊断方法,将故障状况监测信息进行传输,从而实现对联合收获机关键信息以及故障状况实时监测.模拟试验表明,该系统在下位机采集系统、服务器端以及客户端表现稳定,数据丢失率小于5%,信息获取延迟时间小于2s,报警及时、正确,满足联合收获机户外工作远程信息采集与故障监测要求.
【总页数】5页(P203-207)
【作者】陈进;王学磊;王一帆
【作者单位】江苏大学机械工程学院,镇江212013;江苏大学机械工程学院,镇江212013;江苏大学机械工程学院,镇江212013
【正文语种】中文
【中图分类】TP277;S225.3
【相关文献】
1.基于Android手机的无线环境监测系统的设计与应用 [J], 祝阳;祝朝坤
2.玉米联合收获机主要部件故障监测系统研究 [J], 刘文亮;刘枫;胡浩;姜彩宇;王瑛彤;马巍
3.浅析玉米联合收获机主要部件故障监测系统 [J], 刘凤林
4.浅析玉米联合收获机主要部件故障监测系统 [J], 刘凤林;
5.基于Android手机的生理参数移动监测系统 [J], 曾俊;吕红艳;李承红;王洪;刘聪聪;崔建国
因版权原因,仅展示原文概要,查看原文内容请购买。
联合收割机远程监测故障数据库设计
联合收割机远程监测故障数据库设计
陈进;吴培;徐凯;丁松;韩帅军
【期刊名称】《信息技术》
【年(卷),期】2016(40)5
【摘要】目前多数联合收割机故障监测系统上不具备故障数据库,文中设计研发一套基于Lab-VIEW的联合收割机的远程故障监测系统并带有故障数据库.通过ARM 进行数据采集,通过外接多种传感器,可实现对收割机前进速度,滚筒转速等的实时状态监测,通过数据存储,显示及分析,判断故障位置,进而实现远程故障诊断.系统添加故障库功能,可进行故障补救措施查询及新故障添加,对收割机故障进行提前预防和快速的事后处理.
【总页数】4页(P46-49)
【作者】陈进;吴培;徐凯;丁松;韩帅军
【作者单位】江苏大学机械工程学院,江苏镇江212013;江苏大学机械工程学院,江苏镇江212013;江苏大学机械工程学院,江苏镇江212013;江苏大学机械工程学院,江苏镇江212013;江苏大学机械工程学院,江苏镇江212013
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于ArcSDE的小麦苗情远程监测多源数据库设计与实现 [J], 张琴;许童羽;孙鹏
2.基于ARM的联合收割机远程监测系统设计 [J], 陈进;杨广静;徐凯;陈思
3.基于远程监测技术的甘蔗联合收割机智能化系统设计 [J], 章霞东;曾伯胜
4.基于神经网络的配变无功补偿装置故障远程监测方法研究 [J], 黄宇;欧家祥;李航峰;张俊玮;沈兴富
5.基于移动终端的工业机器人远程监测与故障诊断系统设计 [J], 许向南;闫利文;谢煜坚
因版权原因,仅展示原文概要,查看原文内容请购买。
联合收获机多传感器信号采集与数据处理系统
联合收获机多传感器信号采集与数据处理系统郑世宇;陈进;李耀明【期刊名称】《农业机械学报》【年(卷),期】2011()S1【摘要】多传感器信号采集与数据处理是联合收获机作业流程监测与控制的基础工作。
使用微处理器C8051F020的定时器/计数器和标准输入/输出接口(I/O)进行了多路霍尔转速传感器信号的采集,并通过串口通信接收损失量传感器与喂入量传感器的数据。
微处理器C8051F020对数据进行处理与存储,控制240×128点阵式液晶显示器进行数据的实时显示与故障报警,根据数据处理结果控制联合收获机前进速度,进行故障分类处理,并通过串口通信实现存储数据的发送与打印。
试验表明,系统工作稳定、可靠,可以实现联合收获机作业流程监测与控制系统的集成化,并能在联合收获机测控系统的应用中节约成本、增加效率。
【总页数】5页(P107-111)【关键词】联合收获机;多传感器;信号采集;数据处理【作者】郑世宇;陈进;李耀明【作者单位】江苏大学机械工程学院;江苏大学现代农业装备与技术省部共建教育部重点实验室【正文语种】中文【中图分类】S22【相关文献】1.PIC单片机CCP模块在转矩传感器脉冲信号采集系统中的应用* [J], 梁学修;陈志;伟利国2.单片机基础下压电加速度传感器低频信号采集系统的设计 [J], 王静;杨瑶玉;张婷3.巨明牌4LZ-2.5型自走式谷物联合收割机/巨明牌4YH-3型玉米联合收获机/中农机美诺1700型马铃薯联合收获机/燕峰牌秸秆压块机 [J],4.4HL花生联合收获机/YN-2型花生联合收获机/新型高效四分离精米机/玉米剥皮机 [J],5.基于单片机的智能家居控制系统——传感器信号采集、GSM模块和红外学习遥控设计与分析 [J], 单兴巧;因版权原因,仅展示原文概要,查看原文内容请购买。
联合收获机前进速度灰色预测模糊控制系统
联合收获机前进速度灰色预测模糊控制系统陈进;郑世宇;李耀明;吕世杰【期刊名称】《农业机械学报》【年(卷),期】2011(42)10【摘要】分析了联合收获机的工作过程,针对其工作过程中的非线性、时变、大滞后特性,提出了采用灰色预测模糊控制方法对联合收获机的前进速度进行自动控制,使其负荷保持稳定.分析了预测控制和模糊控制相结合的必要性和重要性,设计了基于灰色预测模糊控制的联合收获机前进速度控制装置,建立了灰色预测模糊控制模型,并进行了仿真和试验.仿真结果表明,运用灰色预测模糊控制算法能使控制系统的调整时间更短、超调量更小、控制性能更加优越.%The working process of combine harvester was analyzed,aiming at the properties of nonlinear,time varying and delay. Fuzzy control with grey prediction algorithm was used to control the speed of combine harvester and keep the load stable. The necessity and importance of the combining predictive control with fuzzy control was analyzed. Forward speed control device for combine harvester based on grey prediction fuzzy control was designed. The grey prediction fuzzy control model was established,simulated and tested. The results showed that the control system with the grey prediction fuzzy control algorithm had shorter adjustment time,smaller overshoot and more superior control performance.【总页数】6页(P110-115)【作者】陈进;郑世宇;李耀明;吕世杰【作者单位】江苏大学机械工程学院,镇江212013;江苏大学机械工程学院,镇江212013;江苏大学现代农业装备与技术省部共建教育部重点实验室,镇江212013;江苏大学机械工程学院,镇江212013【正文语种】中文【中图分类】S225.31【相关文献】1.深海行走机构灰色预测-模糊PID速度控制 [J], 乔桂玲;张文明;薛山;冯雅丽2.基于灰色预测-模糊 PID 的全电动注塑机注射速度控制 [J], 崔振华;李素玲3.联合收获机前进速度模糊控制系统多目标遗传优化 [J], 宁小波;陈进;李耀明;杨广静;吴培;陈思4.联合收获机前进速度的模型参考模糊自适应控制系统 [J], 陈进;宁小波;李耀明;杨广进;吴培5.联合收获机喂入量灰色预测模糊PID控制 [J], 姬江涛;王荣先;符丽君因版权原因,仅展示原文概要,查看原文内容请购买。
现代农业机械故障诊断技术研究
现代农业机械故障诊断技术研究发表时间:2018-10-01T15:58:00.613Z 来源:《基层建设》2018年第26期作者:姜阳[导读] 摘要:在现代农业生产中,农业机械应用越来越普遍,对农业生产效率、安全有着极大影响,确保农业机械的正常运行,有着重要的现实意义。
新疆新研牧神科技有限公司新疆乌鲁木齐市 830023摘要:在现代农业生产中,农业机械应用越来越普遍,对农业生产效率、安全有着极大影响,确保农业机械的正常运行,有着重要的现实意义。
对农业机械故障诊断技术展开分析,并探讨其在实际中的应用,为农业机械故障的解决提供依据,以促进农业生产的进步。
关键词:农业机械故障;诊断技术;应用策略1机械故障诊断技术研究现状机械故障诊断技术,顾名思义,就是采用某种技术手段来预测即将发生的机械故障,判断故障发生位置,为预防故障发生及排除故障提供技术支持,降低故障带来的损失。
早期,人们主要通过听声音、触摸等方式判断故障是否产生以及故障产生位置,随着计算机技术的发展,各种计算机技术特别是现代信号处理技术被不断的应用到故障诊断技术中来,机械故障诊断技术已逐渐成为一门系统学科。
1.1通用机械故障诊断技术研究现状最早开展机械故障诊断技术研究的是美国。
20世纪60年代以后,随着航天及航空技术的发展,对故障的预判及诊断提出了更高的要求,传统故障诊断方法已不能满足技术发展的需要,促使美国积极开展故障诊断技术的研究和开发工作。
随后,欧洲、日本等发达国家相继开展机械故障诊断技术研究。
20世纪80年代,在相关部门的支持下,国内大学和科研机构也开始机械故障诊断方面的研究。
在部件摩擦碰撞、松动等故障方面,清华大学裙福嘉课题组对其非线性动力学行为进行理论和实验研究,已取得重要进展。
小波变换为故障诊断时频域重要方法之一,西安交通大学何正嘉课题组即采用小波技术进行故障诊断技术研究。
在机械监测诊断领域,西安交通大学屈梁生课题组创立了全息谱技术,采集机器振动过程中的幅、频、相信息,显著提高机器运行中故障的识别率,此外还有东南大学的钟秉林等学者均长期从事于机械故障诊断研究,出版了大量学术著作和论文,为推动通用机械故障诊断技术做出了重要贡献。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
量化等级 -6 -5 -4 -3 -2 -1 0
变 化 范 围 / (r·min-1) <560 560~580 580~600 600~620 620~640 640~660 660~680
量化等级 6 5 4 5 2 1
变 化 范 围 / (r·min-1) 780~800 760~780 740~760 720~740 700~720 680~700
第 40 卷第 5 期 2014 年 9 月
中国测试 CHINA MEASUREMENT & TEST
Vol.40 No.5 September,2014
doi:10.11857/j.issn.1674-5124.2014.05.020
基于 FNN 的联合收割机故障诊断系统研究
陈 进 1, 龚丽霞 1, 李耀明 2
CHEN Jin1,GONG Li-xia1,LI Yao-ming2 (1. School of Mechanical Engineering,Jiangsu University,Zhenjiang 212013,China; 2. The Key Laboratory of Modern Agricultural Equipment and Technology of Ministry of Education,
显示装置,其带有蜂鸣器,在强光下仍然具有很好的
视觉效果[10]。
2 FNN 故障诊断系统的建立
2.1 FNN 算法模型的建立
FNN 算法结合了模糊逻辑和神经网络的优点,
具有神经网络的学习能力、优化能力和连接式结构,
同时拥有模糊系统类似于人类思维方式的 If-then
规则并易于嵌入专家知识。具体计算过程如下:
y1
是
B s1 1
…
R
m i
:若
x1
是
A i11,…,xn
是
Ainn,则
ym
是
B sm m
对于给定的输入向量 X=(x1,x2,…,xn),可求得
每条规则的适用度为
α1
=
μA(1i1 x1)×
…
μ (x ) Ain 1
n
(1)
通过模糊推理,对于每条规则,输出量的隶属度
函数为
μB
i
=
αi
×
μ (y ) B sr r
通常一组多输入多输出(MIMO)模糊规则可描
述为
Rp:若输入
x1
是
A
i11,…,xn
是
A
inn,则输出
y1
是
B
, s1
1
y2
是
B
s1 2
,…
,ym
是
B
sm m
,其
中
p=1,2,…,N,x(j j=1,2,
…,n)是模糊语
言变量,A
是 ij
j
xj
的
语
言
变
量
值
,μA
是 ij
j
Aijj的隶属度函数。y(r r=1,2,…,m)是输出语言变量,
中 图 分 类 号 :S225.31;S22;TP277;TP183
文 献 标 志 码 :A
文 章 编 号 :1674-5124(2014)05-0077-03
Research of fault diagnosis system on combine-harvester based on FNN algorithm
第 40 卷第 5 期
陈 进等:基于 FNN 的联合收割机故障诊断系统研究
பைடு நூலகம்79
轴流滚筒和输粮搅龙的转速 5 个量作为此系统的输 入量,并将系统输入记为 x1,x2,x3,x4 和 x5;系统的故 障诊断结果作为输出量,并将系统输出记为 y。
以联合收割机的切流滚筒为例,说明系统输入 量隶属度函数的划分。“太湖之星”TH988 切纵流联 合收割机的切流滚筒转速范围是 0~800 r/min,正常 工作转速范围是 700~800r/min,额定转速是 750r/min。 为了精细描述变量,将基本论域划分为 13 个等级, 得到切流滚筒转速 x3 的模糊子集论域为 {-6,-5, -4,-3,-2,-1,0,1,2,3,4,5,6}。每个等级对应的偏 差变化范围如表 1 所示。
基 于 FNN 的PLC
故障诊断 处理系统
液晶显示 声光报警
图 1 故障诊断系统硬件组成
本系统以“太湖之星”TH988 型切纵流联合收割
机为试验样机,割台搅龙、输送槽、切流滚筒、纵轴流
滚筒和输粮搅龙的转速测量均采用霍尔传感器;
采用 PLC 作为数据处理单元;采用嵌入 ARM 系统的
高性能HD064MV3 彩色显示器作为故障诊断系统的
r
(r = 1 ,2 ,… ,m ;i = 1 ,2 ,… ,N)
(2)
采用加权平均的清晰化方法,可求得输出量的
精确值为
N
Σy
sr r
×
μB(r y
) sr
r
yr =
i=1 N
Σ μB(r y
) sr
r
i=1
(y
sr r
是
B
sr r
的中心值,即
μ (y Bsr r
srr)=1)
(3)
由式(2)可化简式(3),就得到故障诊断结果:
78
中国测试
2014 年 9 月
续变化过程等方面进行监测。上述研究虽然在故障 的提前预警方面有很好的效果,但是由于没有考虑 到 联 合 收 割 机 的 非 线 性 特 性 ,所 以 效 果 不 是 很 理 想。本文提出基于模糊神经网络(fuzzy neural net- work,FNN)算法建立切纵流联合收割机的堵塞故障 诊断模型,将模糊算法和神经网络算法[8-9]相结合, 建立联合收割机堵塞故障诊断的各种故障征兆与故 障类型之间的非线性映射关系,实现故障诊断和定 位,解决联合收割机的堵塞故障诊断问题。
对 应 的 模 糊 语 言 变 量 集 为 { 负 大 ,负 中 ,负 小 , 零,正小,正中,正大}7 个词汇,英文字头缩写为{NB, NM,NS,ZO,PS,PM,PB}。x3 对应的语言变量若为正, 说明切流滚筒工作正常;若为负,则说明切流滚筒工 作出现异常。
对于系统输出偏隶属度函数的划分,分析实验 数据可知,当输入部件工作正常时输出 y=1;当输 入 部件有堵塞趋势时,为了防止堵塞故障系统输出 y=2;已经出现故障时系统输出 y=3。则 y 的基本论域 为(1~3),模糊子集论域为{0,1,2}。对应的模糊语言 变量集为{零,小,大}3 个词汇,用英文字头缩写为 {NB,NS,ZO}。y 对应的语言变量若为正,说明工作 正常;y 对应的语言变量若为负,则表明收割机工作 异常。
(1. 江苏大学机械工程学院,江苏 镇江 212013;2. 江苏大学现代农业装备与技术教育部重点实验室,江苏 镇江 212013)
摘 要:为解决切纵流联合收割机故障诊断过程中输入量的非线性问题,设计基于 FNN 算法的联合收割机故障诊断
系统。传感器采集待测部件的转速值为系统输入值,对输入值进行模糊处理得到模糊输入值,将模糊输入输出作为神
0引言
切纵流联合收割机在田间作业时,速度过快会
收 稿 日 期 :2013-10-23;收 到 修 改 稿 日 期 :2014-01-15 基金项目:863 计划项目(2012AA10A502)
国家科技支撑项目(2010BAD01B06) 江苏省科技支撑计划(BE2012312) 镇江市科技支撑计划(NY2012001) 无锡市科技成果产业化资金项目(CYE22C1216) 作 者 简 介:陈 进(1959-),女,江苏盐城市人,教授,博士生 导师,主要从事现代农业装备监测与控制技术研究。
使得喂入量过大从而造成割台搅龙、输送槽、切流滚 筒、纵轴流滚筒和输粮搅龙等转动部件的堵塞,影响 收割机的作业质量[1-2],基于此,国内外学者在联合收 割机智能监测和故障诊断方面做了较多的研究 。 [3-5] Geert Craessaerts 等[6]设计了基于 SOM 监督系统和 BP 网络技术的故障系统,并应用到了荷兰 CX 联合收 割机的传感器故障检测和隔离中,使得检测到传感 器故障成为可能。易立单[7]设计的故障诊断系统,选取 了 5 个参数作为特征向量来对收割机的转轴转速连
N
N
Σ Σ yr=
y
sr r
×
μB(r y
) sr
r
i=1 N
=
y
sr r
×(αi
×
μB
(y Br
r
srr))
i=1 N
=
Σ μB(r y
) sr
r
i=1
Σ(αi
×
μB
(y Br
r
srr))
i=1
N
Σy
sr r
×
αi
N
i=1 N
Σ =
y
sr r
×
αi
Σ αi
i=1
i=1
(4)
根据给出的模糊系统的模糊模型,可设计出如
Jiangsu University,Zhenjiang 212013,China)
Abstract: From a fault diagnosis perspective, combine -harvester is complex non -linear systems which consist of several inputs. In order to detect the various unexpected faults correctly and keep an effective work state, a fault diagnosis system was developed based on FNN algorithm and applied to the combine -harvester fault diagnosis system. Firstly, speed values are regarded as system input acquired by the sensor,and fuzzy inputs can be got by obfuscating the initial input. Secondly,the fuzzy inputs and outputs are treated as a neutral one,and it is easy to develop a troubleshooting rule table after Matlab offline training. Thirdly,the table look-up is the only thing we need to do to work out the fault diagnosis results in practical working. Further field experiments show that this system can solve the nonlinear problem and be a good reflection on the harvester fault conditions which directly lead to a high efficiency state. Key words: combine harvester;fuzzy algorithm;neural network;fault diagnosis