matlab质心定位
双摆系统拉格朗日方程matlab建模反馈
双摆系统拉格朗日方程matlab建模反馈篇一:在物理学中,双摆系统是一个经典的力学问题,它由两个相互连接的摆锤组成,每个摆锤都可以在水平平面内自由摆动。
这个系统可以用拉格朗日方程进行建模,并通过使用MATLAB进行数值模拟和反馈控制。
首先,我们需要定义双摆系统的坐标和速度变量。
对于每个摆锤,我们可以选择以摆锤的质心位置和角度作为广义坐标。
因此,双摆系统可以由四个广义坐标(θ1, θ2)和四个广义速度(ω1, ω2)来描述。
接下来,我们可以使用拉格朗日方法来得到双摆系统的拉格朗日方程。
拉格朗日方程描述了系统的动力学行为,可以通过最小化系统的作用量来得到。
对于双摆系统,拉格朗日方程可以写成如下形式:L = T - V其中,T代表系统的动能,V代表系统的势能。
动能可以通过每个摆锤的动能之和来计算,而势能可以通过每个摆锤的势能之和来计算。
通过计算拉格朗日函数的导数,我们可以得到双摆系统的拉格朗日方程。
然后,我们可以使用MATLAB来建立双摆系统的模型。
可以通过编写一个函数来计算系统的拉格朗日函数,并使用ode45函数来解决系统的微分方程。
ode45函数是MATLAB中用于求解常微分方程的函数,可以根据系统的初始条件和时间范围来模拟系统的行为。
最后,我们可以使用反馈控制来改变双摆系统的行为。
可以通过改变摆锤的初始条件或应用外部力来实现控制。
通过调整控制参数,可以使系统达到所需的稳定状态或实现特定的摆动行为。
总结起来,双摆系统可以使用拉格朗日方程进行建模,并通过MATLAB进行数值模拟和反馈控制。
这种建模方法和控制策略可以应用于其他复杂的力学系统,以研究和控制它们的动态行为。
篇二:双摆系统是一种经典的物理系统,常用于研究力学问题和控制系统设计。
在双摆系统中,两个摆杆通过铰链连接在一起,并且可以在重力的作用下自由摆动。
要对双摆系统进行建模和控制,可以使用拉格朗日方程。
拉格朗日方程是基于能量的原理,可以描述系统的动力学行为。
kmeans聚类算法检测故障的matlab程序
kmeans聚类算法检测故障的matlab程序K-means聚类算法是一种常见的无监督学习算法,可用于对数据集进行分类或聚类。
将其应用于故障检测是一种有效的技术,它可以通过识别数据中的异常模式来检测故障。
本文将介绍如何使用Matlab 实现K-means聚类算法以检测故障。
一、程序概述以下是一个简单的Matlab程序,该程序使用K-means聚类算法来检测故障。
该程序首先读取一组传感器数据,然后应用K-means算法对这些数据进行聚类,最后识别出异常模式以检测故障。
二、数据预处理在运行K-means聚类算法之前,需要对数据进行预处理。
这包括去除噪声、填充缺失值、归一化数据等。
在本程序中,我们将使用Matlab内置的函数来执行这些步骤。
三、K-means聚类算法K-means算法的输入是一组数据点及其相应的类别标签。
算法将数据点分配给最近的类别中心(即质心),并更新质心。
这个过程重复进行,直到算法收敛或达到预设的迭代次数。
在Matlab中,可以使用`kmeans`函数来执行K-means聚类算法。
为了选择最佳的聚类数量(即K值),可以使用一些启发式方法,如肘部法则或轮廓系数。
在本程序中,我们使用轮廓系数来确定最佳的K 值。
四、故障检测一旦K-means聚类算法完成并得到聚类结果,就可以使用这些结果进行故障检测。
异常模式通常包括在正常状态下不会出现的极端值或模式变化。
可以使用一些统计测试(如Z-score测试)来检测这些异常模式。
在Matlab中,可以使用`findpeaks`函数来找到数据中的峰值和谷值,并使用这些信息来检测异常模式。
对于每个聚类,我们可以计算每个数据点的Z-score,并使用这些值来标记异常数据点。
一旦标记完异常数据点,就可以对这些数据进行可视化,以便更直观地检测故障。
五、结果展示和优化程序运行结束后,可以通过可视化工具(如Matlab内置的`scatter`函数)将结果展示出来。
matlab中的kmeans函数
matlab中的kmeans函数MATLAB是一个广泛使用的数学软件,其机器学习算法库完全支持k-means。
k-means 是聚类算法的基本形式之一,用于将数据集分成k个簇或组。
K-means算法的目标是最小化每个簇内数据点的方差或欧几里得距离。
MATLAB中的kmeans函数是一个实用的工具,可以帮助用户轻松实现k-means算法。
本文将从以下方面介绍MATLAB中的kmeans函数:函数基本结构、函数参数说明、算法流程和示例代码。
一。
函数基本结构:kmeans函数的基本结构如下:[idx, C] = kmeans (X, k)idx是一个列向量,指示数据点属于哪个簇,C是一个k x n矩阵,其中每行都是一个簇的质心。
二。
函数参数说明:kmeans函数的主要输入参数是数据集X和所需簇的数量k。
其他可用的选项还包括:Distance:指定所需距离度量的类型。
默认情况下,此选项设置为欧几里得距离。
Replicates:指定要运行的簇的数量。
kmeans函数默认运行一次,但是通过设置此选项可以运行任意数量的副本,并根据最小方差选择一个最佳结果。
此选项的值必须是正整数,建议设置为至少10。
Start:指定初始簇质心的算法。
默认情况下,此选项设置为“簇中心”方法,但也可以使用其他算法,例如随机初始化或指定初始质心。
Display:设置显示每次迭代时结果的详细程度。
默认情况下,此选项的值为'off'(不显示任何内容),但也可以设置为'true'(在MATLAB命令行窗口中显示迭代信息)或'final'(仅在计算完成时显示结果)。
三。
算法流程:下面是kmeans算法的流程:1. 设置k值(所需簇的数量),并选择每个簇的初始质心。
2. 循环以下步骤,直到满足停止标准:(a)将每个数据点分配到最近的质心。
(b)重新计算每个簇的质心。
(c)如果当前方案已经满足停止标准,则停止算法。
MATLAB模拟双星系统中行星运动
MATLAB模拟多星系统中行星运动摘要自古人类就在仰望星空,思考宇宙的奥秘。
人类在宇宙中是否是孤单的,有没有外星生命,这是一个许多人都想知道的问题,人们对现实宇宙进行了许多的研究,想要诞生生命,有一颗可以为行星提供稳定且适合能量的恒星是必不可少的。
在旧版《星球大战》电影中,有一幕标志性的场景,卢克·天行者在塔图因沙漠欣赏令人震撼的双落日奇观。
那么这种双星甚至多星系统,行星的运动是怎样的呢?本文就此问题利用MATLAB进行了仿真模拟。
关键词:多星系统,MATLAB仿真,行星运动1 研究背景与意义太阳,对于我们地球上的万物来说,非常重要,将太阳称为“万物之源”也不为过。
我们地球之所以能够具备孕育生命的条件,一个很重要的因素就是地球处于太阳系的宜居地带,如果不是在太阳系的宜居地带,而是离太阳很近或者比较遥远,意味着地球表面的温度会比较高或者比较低,要么像水星、金星那样高温,要么像土星、木星那样寒冷。
天空中出现一个太阳,对于我们来说刚刚好的,如果多一个太阳,地球可能就会变得很高温,地球是否还能孕育生命都是一个大问题。
那么多星系统中,是否也可以存在宜居带呢?行星在多星系统中的运动又是如何呢?双星系统中的行星是一个三体问题,用现有的数学工具无法给出一般情况下的解析解。
本文模拟了一颗行星围绕一颗双星的轨道,该双星由一颗具有太阳质量的恒星和另一颗具有太阳质量一半的恒星组成。
恒星系统的周期是30个地球日。
本文的研究范围进一步缩小到恒星系统平面内的行星运动,有效地使其成为一个二维问题。
行星可能环绕整个恒星系统运行,可能是两颗恒星中的一颗,也可能是拉格朗日点。
本文采用数值积分方法模拟了行星的运动。
定义恒星系的时变引力场,然后制定描述行星运动的微分方程。
在模拟结束时,检查这颗行星是否仍然在围绕恒星系统的轨道上。
2 天体运动理论2.1 双星系统的运动方程首先,我们看一下恒星系统中恒星的运动方程。
这是一个两体问题,可以通过在原点放置一颗恒星而转化为一个等效的一体问题。
基于RSSI的四边测距改进加权质心定位算法
基于RSSI的四边测距改进加权质心定位算法朱忠记;何熊熊;章晓;赵松;夏燕玲【摘要】该文根据接收信号强度指示的测距特性,改进四边测距,并提出一种改进的加权质心定位算法。
首先引入统计中值加权的方法,有效地降低了采集 RSSI 信号时的测量误差。
然后运用Euclidean节点定位算法,改进四边测距算法。
为进一步提高精度,对WSN定位技术中关于未知节点近似位置的算法做了修正,并对加权质心定位算法中的加权因子进行了优化,使未知节点的定位精度更加精确。
相比之前的许多加权质心定位算法,仿真结果表明,改进的质心定位算法在定位精度方面有很大的提高,鲁棒性也较高。
%Based on the performance of received signal strength indicator ( RSSI ) , this paper proposes a improved four sides ranging and weighted centroid localization algorithm .First, introduce statistical middle value weighting method to effectively reduce the measurement errors in the acquisition of the RSSI signal . Then , use the Euclidean node positioning algorithm to improve four sides ranging algorithm .In order to further improve the accuracy , we amended localization the algorithm about the approximate position of the unknown node of the WSN , and optimized the weighting factors in the weighted centroid localization algorithm , so that it enables more precise positioning accuracy of the unknown node .Compared to the previous weighted centroid localization algorithm , this paper's simulation results show that the improved weighted centroid localization algorithm greatly improved the positioning accuracy , higher robustness .【期刊名称】《杭州电子科技大学学报》【年(卷),期】2014(000)001【总页数】4页(P17-20)【关键词】接收的信号强度指示;四边测距;加权质心算法【作者】朱忠记;何熊熊;章晓;赵松;夏燕玲【作者单位】浙江工业大学信息工程学院,浙江杭州310023;浙江工业大学信息工程学院,浙江杭州310023;浙江工业大学信息工程学院,浙江杭州310023;浙江工业大学信息工程学院,浙江杭州310023;浙江工业大学信息工程学院,浙江杭州310023【正文语种】中文【中图分类】TN920 引言传感器技术、微机电系统技术、无线通信技术、片上系统和低功耗嵌入式技术、计算机技术的进步,推动了具有现代意义的低功耗多功能无线传感器网络的快速发展[1]。
matlab 标定工具箱解读
matlab 标定工具箱解读matlab标定工具箱是一个用于相机标定和立体视觉标定的强大工具。
相机标定是在摄像机成像过程中,将像素坐标和实际世界坐标之间的映射关系建立起来的过程。
立体视觉标定是将两个或多个相机的相对位置和内部参数进行估计的过程。
本文将详细介绍matlab标定工具箱的使用方法,包括相机标定、立体视觉标定以及标定结果的评估与应用。
一、相机标定1. 数据采集在进行相机标定之前,首先需要准备一组由摄像机拍摄的标定图像。
标定图像中应该包含已知尺寸的标定板,比如棋盘格。
在matlab标定工具箱中,先使用`cameraCalibrator`函数创建一个相机标定应用。
然后可以使用`cameraCalibrationDatastore`函数读取图像文件,或者直接使用采集视频流的方式获取图像数据。
2. 标定器创建与运行在标定工具箱中,可以通过以下几个步骤来创建相机标定器:a) 使用`cameraCalibrator`函数创建一个相机标定应用。
可以选择不同的标定模型和算法。
b) 通过`addImage`函数向标定应用中添加标定图像。
可以通过手动添加单张图像或者批量添加整个图像文件夹。
c) 使用`estimateCameraParameters`函数估计相机内部参数和畸变参数。
这个过程将根据已添加的标定图像计算出相机的内部参数矩阵、畸变系数和误差估计等。
3. 标定结果评估与保存一旦相机标定器创建完成,可以通过`showExtrinsics`函数来可视化标定后的结果。
使用该函数可以显示相机在不同位置和姿态下的外部参数估计结果。
同时,还可以通过`showReprojectionErrors`函数来显示重投影误差的直方图和统计信息。
重投影误差是指标定后的相机将标定板三维点投影回图像上的二维点与实际标定板上的二维点之间的差异。
二、立体视觉标定1. 数据采集进行立体视觉标定时,需要准备一组由两个摄像机同时拍摄的标定图像对。
matlab中crtbp函数的用法
matlab中crtbp函数的用法全文共四篇示例,供读者参考第一篇示例:Matlab中的crtbp函数是一个非常常用的函数,用来模拟三体问题中的地月问题。
在地月问题中,太阳是一个质点,地球和月球则分别是两个质点,它们之间通过引力相互作用。
这种模拟可以帮助我们更好地理解三体问题的复杂性,研究宇宙中各种天体之间的运动规律。
在使用crtbp函数之前,我们首先需要了解它的基本用法和参数。
crtbp函数的格式为:\[crtbp(mu0, mu1, mu2)\],其中mu0代表地球-月球系统的质量参数,mu1和mu2则分别表示地球和月球与太阳系统的质量参数。
在地月问题中,mu0通常取值为0.0123,mu1为0.81,mu2为0.0123,这是一个标准的设定。
crtbp函数的返回值是一个6维向量\[y(1), y(2), y(3), y(4), y(5),y(6)\],其中y(1)和y(2)表示小行星的x和y坐标,y(3)和y(4)表示小行星的x和y方向的速度,y(5)和y(6)则表示小行星相对于质心的z坐标和速度。
crtbp函数的用法非常简单,只需要输入地球-月球系统和地球-月球-太阳系统的质量参数,就可以得到小行星在这个系统中的运动轨迹。
我们可以利用这个函数来研究小行星在地月系统中的运动规律,以及判断可能的稳定轨道和不稳定轨道。
除了直接调用crtbp函数进行数值模拟外,我们还可以结合其他函数和工具箱,进一步分析三体问题的性质和演化过程。
在Matlab中,有许多内置函数和工具箱可以用来处理复杂的动力学系统,例如ode45函数用于求解常微分方程组,对动力学系统的演化进行模拟。
通过在Matlab中使用crtbp函数和其他相关工具,我们可以更好地了解三体问题的行为,预测小行星在地月系统中的轨道变化,甚至研究可能的碰撞事件和轨道交叉。
这对于理解宇宙中各种天体之间的相互作用,以及预测一些潜在的天体运动的影响具有重要的意义。
基于Matlab的脑部MRI图像三维重建与动画显示

%过 3D 旋转的 xian 与 xian2,而表面信息不变,仍然是
%fv.faces 与 fv2.faces,并设定图形表面颜色与边缘颜色。
(下转到 120 页)
电脑编程技巧与维护
图 2 通过仿真器运行的动画屏保
Saver。通过 SELECT 选中它就可看到运行结果。如图 2 所示。 发布 Java 手机游戏之前,必须要在真实手机上对 MIDlet
%3D 旋转矩阵中的 T1 和 T3,见公式 (2)、 (4)
M=24; %动画画面的帧数,M=24
mov=avifile ('brainRotate.avi') ;%创建脑部旋转动画文件
'brainRotate.avi'
for j=1:M %以循环方式产生、显示与保存脑部旋转动画
xian=0; xian2=0;
(1) 将图形的质心移至原点。齐次变换矩阵 [2] 为:
(2)
其中
;N---数据集像素
总数; (xi , yi , zi ) --数据集中像素 i 的坐标。
(2) 相对于原点 (即质心) 作旋转变换,旋转变换矩阵为:
T2=RXRYRZ
(3)
其中
,
基金项目: 上海市教育委员会重点学科项目:测控自动化 (J51801);上海第二工业大学校重点课程建设: 《数字信号处 理》 课程建设 (KC0901)。 作者简介:戴虹 (1977-),女,讲师,在职博士生,研究方 向:医学图像与信号处理。 收稿日期:2010-07-06
%旋转 360 度 (共 24 帧)
xian2=xian2 (:,1:3) ;
%脑部上盖绕其质心在平行于
%z 轴的方向旋转 360 度 (共 24 帧) daspect ([1,1,0.4]) ;view (3)
matlab ecef2lv 例子
MATLAB是一种强大的数学计算软件,可以用于各种工程和科学领域的计算和仿真。
其中,ecef2lv函数是MATLAB中常用的一个函数,可以将地心地固坐标系(ECEF)的坐标转换为经纬度和高度(LLA)的坐标。
本文将通过一个例子来介绍如何使用MATLAB中的ecef2lv 函数进行坐标转换。
1. 准备工作在使用ecef2lv函数进行坐标转换之前,首先需要准备好ECEF坐标系下的坐标值。
ECEF坐标系是以地球质心为原点的坐标系,坐标值通常为三维直角坐标系下的x、y、z坐标。
2. 使用ecef2lv进行坐标转换在MATLAB命令窗口中输入以下代码,即可使用ecef2lv函数进行坐标转换:```matlabecef = [xxx, xxx, xxx]; 输入ECEF坐标值[lat, lon, alt] = ecef2lv(ecef); 调用ecef2lv函数进行坐标转换disp(['经度: ', num2str(lon)]);disp(['纬度: ', num2str(lat)]);disp(['高度: ', num2str(alt)]);```3. 分析结果经过ecef2lv函数的计算,我们得到了ECEF坐标对应的经度、纬度和高度值。
这些值可以用于地图上的定位和标注,以及其他地理信息系统中的应用。
4. 结论通过本例子的介绍,我们了解了如何使用MATLAB中的ecef2lv函数来进行地心地固坐标系和经纬度高度坐标系之间的转换。
这对于地理信息系统、航天航空领域等具有重要的应用意义,希望读者能够在实际工程中加以运用。
总结:通过本篇文章的介绍,我们对MATLAB中的ecef2lv函数有了更深入的了解,了解了它的基本用法和在实际工程中的应用。
希望本例子对读者有所帮助,谢谢阅读。
在实际工程中,地理信息系统(GIS)和导航系统常常需要进行坐标的转换和处理。
ECEF坐标系和经纬度高度坐标系是其中最常见的两种坐标系统,因此对它们之间的转换有着重要的需求。
MATLAB中图像函数大全 详解及例子
图像处理函数详解——strel功能:用于膨胀腐蚀及开闭运算等操作的结构元素对象(本论坛随即对膨胀腐蚀等操作进行讲解)。
用法:SE = strel(shape,parameters)创建由指定形状shape对应的结构元素。
其中shape的种类有arbitrary''pair''diamond''periodicline''disk''rectangle''line''square''octagon参数parameters一般控制SE的大小。
例子:se1 = strel('square',6)% 创建6*6的正方形se2 = strel('line',10,45)% 创建直线长度10,角度45se3 = strel('disk',15)% 创建圆盘半径15se4 = strel('ball',15,5)% 创建椭圆体,半径15,高度5图像处理函数详解——roipoly功能:用于选择图像中的多边形区域。
用法:BW = roipoly(I,c,r)BW = roipoly(I)BW = roipoly(x,y,I,xi,yi)[BW,xi,yi] = roipoly(...)[x,y,BW,xi,yi] = roipoly(...)BW = roipoly(I,c,r)表示用向量c、r指定多边形各点的X、Y坐标。
BW选中的区域为1,其他部分的值为0.BW = roipoly(I)表示建立交互式的处理界面。
BW = roipoly(x,y,I,xi,yi)表示向量x和y建立非默认的坐标系,然后在指定的坐标系下选择由向量xi,yi指定的多边形区域。
例子:I = imread('eight.tif');c = [222 272 300 270 221 194];r = [21 21 75 121 121 75];BW = roipoly(I,c,r);imshow(I)figure, imshow(BW)图像处理函数详解——roifilt2功能:用于对一个区域进行滤波。
激光光斑中心位置及大小的确定Matlab讲解
燕山大学课程设计说明书题目:20 目标位置及大小的确定学院(系):电气工程学院年级专业: 09级仪表三班学号:((学生姓名:)))指导教师:林洪彬王志彬教师职称:讲师副教授燕山大学课程设计(论文)任务书院(系):电气工程学院基层教学单位:自动化仪表系说明:此表一式四份,学生、指导教师、基层教学单位、系部各一份。
燕山大学课程设计评审意见表摘要首先对图像进行二值化,然后用bwlabel,regionprops等函数对二值图像进行去除噪声操作,然后通过找出与所求区域具有相同标准二阶中心矩的椭圆的长轴长度,短轴长度,离心率等,并找出包含所求区域的最小凸多边形,的顶点坐标。
通过一定的方法,用所求椭圆的相关参数确定一个正多边形。
使该正多边形具有一个相当大的边数,是该多边形接近一个圆。
这个圆就是所要拟合的圆。
最后通过三个点求圆的中心和半径。
关键字二值化处理去噪声处理圆的拟合已知三点求圆的中心和半径目录第一章彩色图像的二值化1图像的二值化原理2 图像的二值化的程序实现3二值化前后效果对比第二章去除噪声1去除噪声的原理2去除噪声的程序实现3去除噪声前后的图像对比第三章圆拟合1圆拟合原理2圆拟合的程序实现3拟合效果第四章求圆心及半径第五章完整的Matlab程序总结参考文献资料第一章彩色图像的二值化第一节图像的二值化原理图像的二值化处理就是将图像上的点的灰度置为0或255,也就是讲整个图像呈现出明显的黑白效果。
即将256个亮度等级的灰度图像通过适当的阀值选取而获得仍然可以反映图像整体和局部特征的二值化图像。
在数字图像处理中,二值图像占有非常重要的地位,特别是在实用的图像处理中,以二值图像处理实现而构成的系统是很多的,要进行二值图像的处理与分析,首先要把灰度图像二值化,得到二值化图像,这样子有利于再对图像做进一步处理时,图像的集合性质只与像素值为0或255的点的位置有关,不再涉及像素的多级值,使处理变得简单,而且数据的处理和压缩量小。
MATLAB技术音乐分析方法

MAT1AB技术音乐分析方法介绍音乐是人类文化中不可或缺的一部分,它有着丰富多样的样式和形式。
随着科技的发展,人们对音乐进行分析和研究的需求也逐渐增加。
MAT1AB作为一种流行的科学计算软件,可以提供丰富的工具和算法来分析音乐。
本文将探讨一些MAT1AB技术在音乐分析方面的应用。
音频信号处理在音乐分析中,首先需要将音频信号转换为数字形式,以便进行计算和分析。
MAT1AB提供了强大的信号处理工具箱,可以实现音频信号的读取、处理和分析。
通过MAT1AB中的函数,我们可以轻松地将音频文件加载到变量中,并进行预处理操作,比如去噪、均衡化和滤波等。
频谱分析频谱分析是音乐分析的重要一环,它可以揭示出音频信号中不同时域和频域的特征。
MAT1AB提供了快速傅里叶变换(FFT)和短时傅里叶变换(STFT)等函数,可以将音频信号转换成频域表示。
通过对频谱数据的分析,可以提取出音乐中的频谱特征,比如频谱图、频谱包络和频谱质心等。
节奏分析节奏是音乐中的重要元素,了解音乐的节奏特征对分析和理解音乐非常重要。
MAT1AB提供了一系列的时间序列分析工具,可以用于检测和提取音频信号中的节奏信息。
通过对信号进行重采样和分析,我们可以得到节拍点、节拍强度和节拍频率等节奏特征。
音高分析音高是音乐中的基本特征之一,它可以用于分析音乐的旋律和和声。
MAT1AB提供了多种音高分析算法,可以用于检测和提取音频信号中的音高信息。
通过调用MAT1AB 中的音高分析函数,我们可以得到音高轮廓、音高曲线和音高直方图等音高特征,从而对音乐的旋律进行定量分析和比较。
情感分析音乐不仅仅是一种艺术形式,也承载着人们的情感和情绪。
MAT1AB可以通过分析音频信号的特征来实现音乐的情感分析。
通过对振幅、节奏、音高等各种特征的分析,可以推断出音乐中所包含的情感倾向。
这种情感分析的结果可以应用于音乐推荐系统、情感分类和情感识别等应用中。
机器学习方法除了以上介绍的传统分析方法,MAT1AB还提供了丰富的机器学习工具箱,可以用于音乐分类、拟合和聚类等任务。
基于RSSI比例系数的加权质心定位算法
基于RSSI比例系数的加权质心定位算法作者:蔡燕,陈华来源:《现代职业教育.高职本科》 2017年第5期[摘要]针对传统质心算法存在的不足,提出了一种基于节点接收信号强度(RSSI)比值的加权质心定位算法,首先求出待定位节点接收到的所有信标节点RSSI的均值作为一个基准值,并求出最大值RSSI和最小值RSSI的均值作为另一基准值。
利用这两个基准值推导出加权比例系数,再利用该比例系数对质心坐标进行加权处理。
将改进的算法分别与传统质心算法和已经定位的未知节点升级为信标节点的质心算法进行比较。
仿真实验表明,基于RSSI比值加权的质心算法有效地减少了定位误差,定位精度优于其他两种算法,并且定位过程简单。
[关键词]基准值;加权系数;质心算法[中图分类号] TP212[文献标志码] A[文章编号] 2096-0603(2017)13-0177-01无线传感器网络的定位技术可分为两类:基于测距和基于非测距两种。
基于非测距的定位算法主要有:DV-Hop算法、质心算法、Amorphous算法、APIT,MDS-MAP等;基于测距的定位算法有:RSSI、TDOA、AOA、TOA。
其中,质心算法定位过程简单,对硬件设备要求低,但是定位精度低。
基于节点接收信号强度(RSSI)比值的加权质心定位算法,利用待定位节点接收到的RSSI求出加权比例因子,进一步对质心坐标进行加权处理,并且与其他两种算法进行比较,基于RSSI比值的改进算法优于其他两种算法,有效减少了定位误差,提高了定位精度。
一、算法步骤详细算法步骤:1.信标节点周期性地广播数据包,数据包中包括节点ID和自身的位置坐标。
2.待定位节点收到信标节点的数据包信息,记录每一个信标节点的RSSI值,并且求出其平均值。
同时,将信标节点所记录的RSSI值排序,选出最大值和最小值并求两者的平均值。
再利用这两个基准点计算出相应坐标的RSSI比例因子。
3.利用公式计算出未知节点坐标。
多边形中心点坐标matlab-概述说明以及解释
多边形中心点坐标matlab-概述说明以及解释1.引言1.1 概述在几何学中,多边形是一种封闭的平面图形,由若干条线段连接而成,每条线段称为多边形的边,相邻边之间的交点称为多边形的顶点。
多边形是图形学中的重要概念,在实际应用中也有着广泛的应用。
多边形的中心点是指多边形内部点到多边形各个顶点距离之和最小的点,也被称为多边形的几何中心。
计算多边形的中心点坐标对于图形学、计算机辅助设计等领域具有重要意义。
本文将介绍多边形中心点的定义以及计算多边形中心点坐标的原理,并介绍如何使用MATLAB编程计算多边形中心点的方法。
通过对多边形中心点的研究与计算,可以更好地理解多边形的性质与特点,为相关领域的研究和应用提供参考和帮助。
1.2 文章结构文章结构部分主要介绍了本文的组织方式和每个章节的内容概要,方便读者更好地理解整篇文章的逻辑结构和主要内容。
文章结构主要包括引言、正文和结论三个部分。
引言部分介绍了本文的背景和意义,正文部分详细介绍了多边形中心点的定义、计算原理和使用MATLAB计算方法,结论部分总结了全文的主要观点和成果,并展望了未来的应用前景。
通过明确的文章结构,读者可以更好地把握文章的主题和内容,提高阅读效率和理解度。
1.3 目的本文的目的是介绍如何使用MATLAB计算多边形的中心点坐标。
通过本文的阐述,读者可以了解到多边形中心点的定义,计算多边形中心点坐标的原理,并掌握使用MATLAB编程的方法来计算多边形中心点坐标。
希望本文能够帮助读者更深入地了解多边形几何特性,提高他们在MATLAB编程中应用数学知识的能力。
同时,本文也可以作为其他相关领域的研究人员和工程师在实际工作中处理多边形中心点的参考。
2.正文2.1 多边形中心点的定义多边形中心点是指一个多边形的几何中心,也可以称为重心或质心。
在平面几何中,对于任意一个简单多边形(即不自交、没有洞的多边形),其中心点是可以唯一确定的。
多边形的中心点具有以下特点:1. 多边形中心点是多边形的一个点,其到多边形各个顶点的距离之和最小。
matlab曲线峰值的质心坐标
在MATLAB中,曲线峰值的质心坐标是一个非常重要的概念。
我们可以通过计算曲线的面积和重心来确定曲线的质心坐标。
在本文中,我们将深入探讨MATLAB中曲线峰值的质心坐标,并讨论其在数据分析和可视化中的应用。
1. 曲线峰值的质心坐标是指曲线上所代表的峰值的重心位置。
在MATLAB中,我们可以使用各种函数来计算曲线的质心坐标,例如“findpeaks”和“centerOfMass”等。
2. 我们需要使用“findpeaks”函数来找到曲线的峰值。
这个函数可以帮助我们找到曲线中的局部极大值点,并返回它们的位置和数值。
一旦我们找到了曲线的峰值,我们就可以使用“centerOfMass”函数来计算曲线的质心坐标。
这个函数可以根据曲线的数值和位置来计算曲线的质心坐标。
3. 在MATLAB中,计算曲线峰值的质心坐标对于数据分析和可视化非常有用。
通过计算曲线的质心坐标,我们可以得到曲线的重心位置,从而更好地理解曲线的形状和特征。
4. 曲线峰值的质心坐标还可以在信号处理和模式识别中发挥重要作用。
通过计算曲线的质心坐标,我们可以对曲线进行特征提取,从而实现对曲线的分类和识别。
MATLAB中曲线峰值的质心坐标是一个重要的概念,它可以帮助我们更好地理解曲线的形状和特征。
通过计算曲线的质心坐标,我们可以实现对曲线的数据分析和可视化,并在信号处理和模式识别中发挥重要作用。
我个人认为,掌握曲线峰值的质心坐标计算方法对于深入理解MATLAB中的数据处理和分析非常重要。
在文章中,我们对MATLAB中曲线峰值的质心坐标进行了深入探讨,并讨论了其在数据分析和可视化中的应用。
通过计算曲线的质心坐标,我们可以更好地理解曲线的形状和特征,同时在信号处理和模式识别中发挥重要作用。
希望本文能帮助您更好地理解MATLAB中曲线峰值的质心坐标的重要性和应用价值。
曲线峰值的质心坐标是曲线重心位置,代表了曲线的峰值所在位置以及在该位置上的重心位置。
在MATLAB中,我们可以使用各种函数来进行曲线的峰值检测和质心坐标计算,以便更好地理解曲线的形状和特征。
Matlab图像处理函数:regionprops

Matlab图像处理函数:regionprops这⾥给出在Matlab图像处理⼯具箱中⾮常重要的⼀个图像分析函数:regionprops。
顾名思义:它的⽤途是get the properties of region,即⽤来度量图像区域属性的函数。
语法STATS = regionprops(L,properties)描述测量标注矩阵L中每⼀个标注区域的⼀系列属性。
L中不同的正整数元素对应不同的区域,例如:L中等于整数1的元素对应区域1;L中等于整数2的元素对应区域2;以此类推。
返回值STATS是⼀个长度为max(L(:))的结构数组,结构数组的相应域定义了每⼀个区域相应属性下的度量。
properties 可以是由逗号分割的字符串列表、饱含字符串的单元数组、单个字符串 'all' 或者 'basic'。
如果 properties 等于字符串 'all',则所有下述字串列表中的度量数据都将被计算,如果 properties 没有指定或者等于 'basic',则属性: 'Area', 'Centroid', 和 'BoundingBox' 将被计算。
下⾯的列表就是所有有效的属性字符串,它们⼤⼩写敏感并且可以缩写。
属性字符串列表Area EquivDiameter MajorAxisLengthBoundingBox EulerNumber MinorAxisLengthCentroid Extent OrientationConvexArea Extrema PixelIdxListConvexHull FilledArea PixelListConvexImage FilledImage SolidityEccentricity Image属性详细定义本部分将结合⼀个具体的例⼦说明各种字串相关属性的意义,矩阵取⾃在蚁蛉模式识别中做过预处理后的斑纹分割图像,如下图:这是⼀幅⼆值图像,在应⽤regionprops函数之前必须将其标注,可以调⽤ bwlabel函数和伪彩⾊处理,标注后的图像如下图:下⾯基于以上的材料来考察属性的含义。
关于质心提取的若干图像处理问题的总结(精选合集)
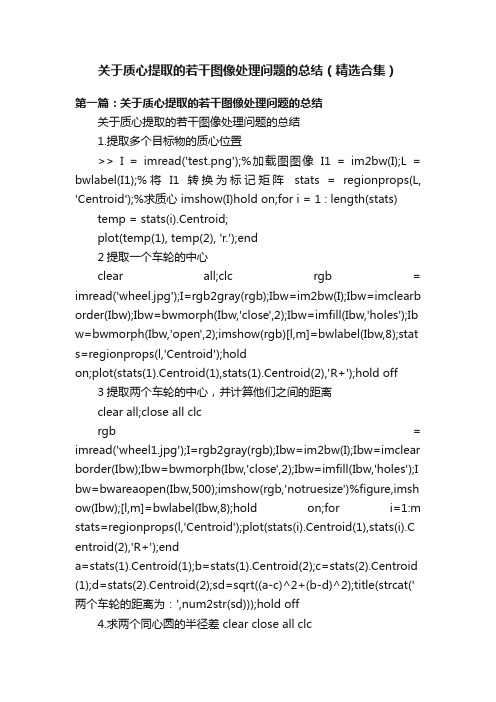
关于质心提取的若干图像处理问题的总结(精选合集)第一篇:关于质心提取的若干图像处理问题的总结关于质心提取的若干图像处理问题的总结1.提取多个目标物的质心位置>> I = imread('test.png');%加载图图像I1 = im2bw(I);L = bwlabel(I1);%将I1转换为标记矩阵stats = regionprops(L, 'Centroid');%求质心 imshow(I)hold on;for i = 1 : length(stats) temp = stats(i).Centroid;plot(temp(1), temp(2), 'r.');end2提取一个车轮的中心clear all;clc rgb = imread('wheel.jpg');I=rgb2gray(rgb);Ibw=im2bw(I);Ibw=imclearb order(Ibw);Ibw=bwmorph(Ibw,'close',2);Ibw=imfill(Ibw,'holes');Ib w=bwmorph(Ibw,'open',2);imshow(rgb)[l,m]=bwlabel(Ibw,8);stat s=regionprops(l,'Centroid');holdon;plot(stats(1).Centroid(1),stats(1).Centroid(2),'R+');hold off 3提取两个车轮的中心,并计算他们之间的距离clear all;close all clcrgb = imread('wheel1.jpg');I=rgb2gray(rgb);Ibw=im2bw(I);Ibw=imclear border(Ibw);Ibw=bwmorph(Ibw,'close',2);Ibw=imfill(Ibw,'holes');I bw=bwareaopen(Ibw,500);imshow(rgb,'notruesize')%figure,imsh ow(Ibw);[l,m]=bwlabel(Ibw,8);hold on;for i=1:m stats=regionprops(l,'Centroid');plot(stats(i).Centroid(1),stats(i).C entroid(2),'R+');enda=stats(1).Centroid(1);b=stats(1).Centroid(2);c=stats(2).Centroid (1);d=stats(2).Centroid(2);sd=sqrt((a-c)^2+(b-d)^2);title(strcat('两个车轮的距离为:',num2str(sd)));hold off4.求两个同心圆的半径差 clear close all clcRGB=imread('yuan.jpg');%读入图像I = rgb2gray(RGB);threshold = graythresh(I);BW = im2bw(I,threshold);dim = size(BW);col = round(dim(2)/2);row = min(find(BW(:,col)));connectivity = 8;num_points= 180;contour = bwtraceboundary(BW, [row, col], 'N', connectivity, num_points);% imshow(RGB,'notruesize');% hold on;%plot(contour(:,2),contour(:,1),'g','LineWidth',2);x = contour(:,2);y = contour(:,1);abc=[x y ones(length(x),1)][-(x.^2+y.^2)];a = abc(1);b = abc(2);c = abc(3);xc =-a/2;yc =-b/2;radius1 = sqrt((xc^2+yc^2)-c)%figureimg4=BW(15:170,15:170);img4=imclearborder(img4,8);imshow(i mg4)dim = size(img4);col = round(dim(2)/2);row = min(find(img4(:,col)));connectivity = 8;num_points= 180;contour = bwtraceboundary(img4, [row, col], 'N', connectivity, num_points);% imshow(img4,'notruesize');% hold on;% plot(contour(:,2),contour(:,1),'g','LineWidth',2);x = contour(:,2);y = contour(:,1);abc=[x y ones(length(x),1)][-(x.^2+y.^2)];a = abc(1);b = abc(2);c = abc(3);xc =-a/2;yc =-b/2;radius2 = sqrt((xc^2+yc^2)-c)imshow(RGB)message = sprintf('The estimated radius of big circle is %2.3f pixels',radius1);text(15,15,message,'Color','y','FontWeight','bold');title('大圆')message = sprintf('The estimated radius of small circle is %2.3f pixels', radius2);text(25,25,message,'Color','y','FontWeight','bold');title('小圆')distance=radius1-radius2message = sprintf('The estimated distance of two circleis %2.3f pixels', distance);text(90,45,message,'Color','y','FontWeight','bold');5.求桃形物体最宽的部分的宽度img=imread('seed.jpg');img=rgb2gray(img);img=im2bw(im g);img1=img';[m n]=find(img1==1);max(m)-min(m);ans =369第二篇:图像滤波总结数字图像处理:各种变换滤波和噪声的类型和用途总结一、基本的灰度变换函数 1.1.图像反转适用场景:增强嵌入在一幅图像的暗区域中的白色或灰色细节,特别是当黑色的面积在尺寸上占主导地位的时候。
无线传感器网络节点定位算法的Matlab仿真讲解
Abstract:Wireless sensor network integrated sensor technology, MEMS technology, modern networking and wireless communications technologies, IT has become one of the hot areas of current research. Because of its self-organizing network, the inherent advantages of wide coverage and high fault tolerance and low cost network, build flexible, and convenient, making wireless sensor networks are widely used in military and civilian fields. Node positioning technology is a key enabling technology for wireless sensor network node itself correctly positioned to provide location information to monitor events premise. This paper studies the wireless sensor network node localization algorithm principle, classification and difficulties, analysis of the principle of different positioning algorithms and compare their advantages and disadvantages. Conduct for wireless sensor network node positioning system technology research, proposed a series of solutions to the problem of wireless sensor network node localization, combined with the practical needs of research and learning and research. Finally, the design and implementation of a wireless sensor network positioning application system based on Matlab simulation experiments.
质心坐标(barycentriccoordinates)及其应用
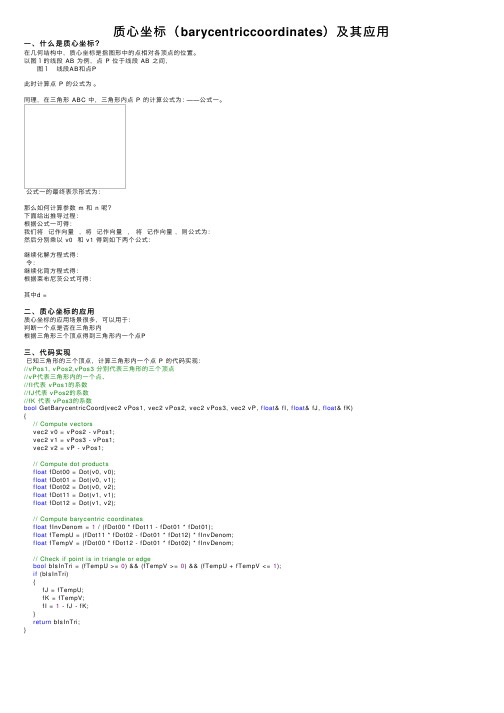
质⼼坐标(barycentriccoordinates)及其应⽤⼀、什么是质⼼坐标?在⼏何结构中,质⼼坐标是指图形中的点相对各顶点的位置。
以图1的线段 AB 为例,点 P 位于线段 AB 之间, 图1 线段AB和点P此时计算点 P 的公式为。
同理,在三⾓形 ABC 中,三⾓形内点 P 的计算公式为:——公式⼀。
公式⼀的最终表⽰形式为:那么如何计算参数 m 和 n 呢?下⾯给出推导过程:根据公式⼀可得:我们将记作向量,将记作向量,将记作向量,则公式为:然后分别乘以 v0 和 v1 得到如下两个公式:继续化解⽅程式得:令:继续化简⽅程式得:根据莱布尼茨公式可得:其中d =⼆、质⼼坐标的应⽤质⼼坐标的应⽤场景很多,可以⽤于:判断⼀个点是否在三⾓形内根据三⾓形三个顶点得到三⾓形内⼀个点P三、代码实现已知三⾓形的三个顶点,计算三⾓形内⼀个点 P 的代码实现://vPos1, vPos2,vPos3 分别代表三⾓形的三个顶点//vP代表三⾓形内的⼀个点、//fI代表 vPos1的系数//fJ代表 vPos2的系数//fK 代表 vPos3的系数bool GetBarycentricCoord(vec2 vPos1, vec2 vPos2, vec2 vPos3, vec2 vP, float& fI, float& fJ, float& fK){// Compute vectorsvec2 v0 = vPos2 - vPos1;vec2 v1 = vPos3 - vPos1;vec2 v2 = vP - vPos1;// Compute dot productsfloat fDot00 = Dot(v0, v0);float fDot01 = Dot(v0, v1);float fDot02 = Dot(v0, v2);float fDot11 = Dot(v1, v1);float fDot12 = Dot(v1, v2);// Compute barycentric coordinatesfloat fInvDenom = 1 / (fDot00 * fDot11 - fDot01 * fDot01);float fTempU = (fDot11 * fDot02 - fDot01 * fDot12) * fInvDenom;float fTempV = (fDot00 * fDot12 - fDot01 * fDot02) * fInvDenom;// Check if point is in triangle or edgebool bIsInTri = (fTempU >= 0) && (fTempV >= 0) && (fTempU + fTempV <= 1);if (bIsInTri){fJ = fTempU;fK = fTempV;fI = 1 - fJ - fK;}return bIsInTri;}。