DELMIA机器人仿真培训练习资料
仿真机器人考试题库及答案
仿真机器人考试题库及答案一、单项选择题1. 仿真机器人的核心技术是什么?A. 人工智能B. 传感器技术C. 机械设计D. 材料科学答案:A2. 下列哪项不是仿真机器人的主要应用领域?A. 工业制造B. 医疗辅助C. 家庭服务D. 深海探测答案:D3. 仿真机器人的传感器通常用于检测以下哪些参数?A. 温度和湿度B. 声音和光线C. 压力和速度D. 所有上述选项答案:D4. 仿真机器人的控制系统通常采用哪种类型的计算机?A. 个人电脑B. 嵌入式系统C. 服务器D. 工作站答案:B5. 在仿真机器人的设计中,以下哪项不是必须考虑的因素?A. 能源效率B. 环境适应性C. 外观美观D. 价格成本答案:C二、多项选择题6. 仿真机器人的设计需要考虑以下哪些因素?A. 机械结构的稳定性B. 传感器的精确性C. 能源的可持续性D. 用户的交互体验答案:ABCD7. 仿真机器人在医疗领域的应用包括哪些?A. 手术辅助B. 患者护理C. 药物配送D. 远程诊断答案:ABCD8. 仿真机器人的编程语言可能包括哪些?A. PythonB. C++C. JavaD. MATLAB答案:ABCD9. 仿真机器人的能源供应方式可能包括哪些?A. 电池B. 太阳能C. 燃料电池D. 外部电源答案:ABCD10. 仿真机器人的安全性考虑包括哪些方面?A. 机械安全B. 电气安全C. 数据安全D. 环境安全答案:ABCD三、判断题11. 仿真机器人的发展完全依赖于人工智能技术的进步。
(对/错)答案:错12. 仿真机器人在家庭服务中的应用仅限于清洁和安保。
(对/错)答案:错13. 仿真机器人的传感器可以检测到所有类型的环境变化。
(对/错)答案:错14. 仿真机器人的控制系统必须具备高度的实时性。
(对/错)答案:对15. 仿真机器人的设计和制造不需要考虑成本因素。
(对/错)答案:错四、简答题16. 简述仿真机器人在工业制造中的应用。
Delmia仿真入门

26
3、机器人运动机构建立
➢ 用STP格式文件自己创建机器人 2.拆分:将每个里面的单个零件另存为CGR格式,大大减
少文件的大小,提高文件后续的流畅性。
27
3、机器人运动机构建立
3.将STP格式下面的文件全部删除,再单击装配文件名→ 右键→部件→现有部件→选中刚才另存的所有CGR文件→ 打开,会自动将零件装配在一起。(也可以一个个装配)
5
DELMIA认识
➢ DELMIA Process Engineer 集成的产品、工艺和 资源规划解决方案
➢ DELMIA Process Engineer为制造业的设计和优化 提供了彻底的强大的解决方案,从产品概念阶段 、工艺规划到产品生产。
➢ DELMIA Process Engineer是制造业工艺规划方案 的领导者,工艺规划人员在初始设计产品的基础 上,根据不同的规划前提条件,定义制造所需的 工艺和资源。
8、更改知识库的默认路径: win_b64/statup/robotlib/catalogs/DEVICES。
8
1.软件安装
➢ 祥见:DELMAI V5R20安装包,里面也有安装说明,帮助
文件可以不安装。
9
2.工作环境基本设置
➢工具→选项
10
2.工作环境基本设置
➢ 第一次打开时将许可证可用的配置或产品列表全部勾选, 否则极有可能后续会影响软件的一些操作。
24
2.工作环境基本设置
➢ 常用操作工具条介绍
创建新任务
增加标签 分割机器人任务 镜像 任务或是标签 修饰操作 创建一个调用任务动作 修改标签方位 设置翻转转数 结合-标签转换 指派适合轮廓
《3D仿真虚拟机器人培训-基础知识部分》讲义0328

《3D 仿真虚拟机器人教师培训》讲 义广州市教育信息中心(电教馆)二 O一 O 年三月目 录第一章 基础知识部分 (3)第二章 虚拟机器人程序设计初步 (8)第三章 超声波传感器和触碰传感器的使用 (11)第四章 红外传感器和光电传感器的使用 (14)第五章 机器人灭火程序分析 (19)第一章 基础知识部分学习目标了解机器人的概念、机器人的应用、机器人发展与未来,介绍机器人教育进入我国 中小学现状分析、开展实体机器人教育的瓶颈,开展3D仿真虚拟机器人教育的优势等, 认识 3D 仿真虚拟机器人软件的组成,以及机器人场地和机器人模型的结构。
掌握对机 器人场地和机器人模型的导入和新建的方法,掌握如何在 3D 仿真机器人软件中机器人 场地和机器人模型的编辑。
重点和难点1、教学重点:3D仿真虚拟机器人场地和机器人模型的运用。
2、教学难点:3D仿真虚拟机器人场地和机器人模型的编辑。
学习内容一、 机器人的概念与应用展示几组机器人图片,让大家了解机器人,在展示任务的同时提出问题,引导大家 认识我们生活中的各种机器人,归纳出机器人的概念。
图1-1 迎宾机器人 图1-2与机器人对话 图1-3 机器人“乐队”(一)什么是机器人?中国的科学家们把机器人定义为:机器人是一种自动化的机器,而且其具备一些与 人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有 高度灵活性的自动化机器。
(二)机器人的应用领域从工业拓广到 农业、林、牧、渔,甚至进入寻常百姓家。
机器人的种类之多,应 用之广,影响之深,机器人分为军用机器人和民用机器人。
(三)学校开展机器人教育的目的和意义智能机器人融合了机械、电子、传感器、无线通讯、声音识别、图像处理和人工智 能等领域的先进技术。
在中小学开展智能机器人实验活动可以培养学生的动手实践能 力、创新思维能力和团结协作能力,同时也能够适应新课程改革的需要,对提高中小学 生科技素养有着巨大的促进作用。
DELMIA 人机 基础培训2

Module 2Ø概述人体模型构造器是基于同类中最佳人体模型系统,该系统关联于已存物理场景进行以人为中心设计论证的调查采集。
人体模型构造器定位于在数字化工作区内创建和操控人体数字模型,以进行人机交互分析。
Ø目标学习创建工作区和设置人体模型属性掌握与工作区交互移动人体模型学习搭建人体模型约束掌握如何创建人体库掌握如何执行干涉分析常用工具栏Ø创建工作区Ø设置人体模型属性Ø移动人体模型Ø工作区交互操作Ø设置人体模型约束Ø创建库文件Ø执行干涉分析5 hoursØ创建工作区创建工作区或者工作台是人机仿真解决方案的重要组成部分。
它为创建人体模型、插入资源或产品,以及变换操作提供了平台,以便我们来完成后续的分析。
在这一环节里,我们可以搭建一个包含创建人体模型和工作区部件各种操作的情景。
想了解更多人体模型构造器的相关知识可参阅该模块的帮助文档。
Ø创建工作区——流程1.启动DELMIA V5,2.从菜单栏选择“开始/ 人机工程学设计与分析/ 人体模型构造器”启动;3.打开位于“HP Process”文件夹目录下的“Product1.CATProduct”;4.下面打开项目所显示的即为“人体模型构造器”模块界面。
工作平台图标指示出当前工作模块。
Ø创建工作区——着色渲染设置流程1.在视图工具栏单击含边线着色图标上的下拉箭头;2.单击拖出灰色“视图模式”工具栏,并拖放到工作区域。
3.单击“视图模式”工具栏上的不同图标观察显示结果,完成后再次单击“渲染”图标。
4.在“视图”工具栏单击“轴侧视图”图标上的下拉箭头;5.单击拖出“快速视图”工具栏,并拖放到工作区域;6.单击“快速视图”工具栏上的不同图标观察显示结果,完成后再次单击“轴侧视图”图标。
Ø创建工作区——着色渲染设置流程7.在“视图”工具栏单击“多视图”图标;在多视图窗里可通过单击来编辑任一个视图。
DELMIA学习要点

DELMIA学习要点一、基本操作该软件基于CATIA, 属于同一公司产品,通过DELMIA可直接打开CATIA对相关模型进行操作。
一些基本操作,可以借阅CATIA的相关书籍。
1、基本操作命令视图平移先按住鼠标滚轮不放,移动鼠标,即可平移视图视图缩放先按住鼠标滚轮不放,点击左键,然后移动鼠标,即可缩放视图三维动态观察(改变视点)先按住鼠标滚轮不放,再按住左键不放,然后移动鼠标,即可调整模型观察方位。
单击一下左键(或右键)并上下移动鼠标,则物体会随着鼠标上移而被放大,下移缩小。
2、常见问题模型变灰:是因为点击了模型树上的白色连线,再点击一下,即恢复正常。
二、装配件设计1、固定装配举例建立L形零件(也可直接使用本目录下L block.CATPart),如图1所示:图1 L形零件建立长方体零件(也可直接使用本目录下box.CATPart),如图2所示:图2 长方体零件尺寸20×60×70打开面板:开始→机械设计→装配件设计。
将上述两零件装配在一起,如图3所示:图3 装配体(结果见文件:L & box.CATProduct)2、机构装配举例三、装配模拟1、移动一个设备中,做好轨迹后,点击键盘上的光标移动键(→),设备即可沿轨迹移动,←则反向移动。
3、使用Assembly Process Simulation模块复制各个process后,务必做到PERT图中,各个process顺序连起来,否则,在每个Process里时,容易出现部分模型错乱的现象。
四、加入人的浏览1、首先在human builder里建一个人的模型,形成一个产品2、然后进入人机工程学分析与设计-〉Human Task Simulation。
再加入场景所需要的产品3、作为资源加入人所在的产品。
4、插入人的任务,插入->,如果看不到这个菜单,点击P.P.R.树上的Process, 右键,再点编辑,一般即可在下拉菜单上看到create a task 命令。
(新整理完整版)delmia-DPM(讲座)2009-2-25(精编课件)
Input XSL = requires Instructor direction to select script Output Directory = requires Instructor direction to select
output directory location
Product Structure
• 工艺库创建完成后可以被附加在多个工艺之上
Delmia DPM
20
选 文件File/新建New 在新建(New)对话框中选择Processlibrary,
点确定(OK) 增加活动和子活动(注意创建完文件/Save as保存)
• 单击Create new activity type图标 • 高亮增加子活动的活动,单击创建新子类型图标
Turn Off AutoBackup
Other Documents= requires Instructor direction to configure path to data
Turn on Automatic scroll
Turn on Display Manipulation Bounding box Turn on Gravitational Effects to z axis
标,后点 process节 点,才出对
话框
Delmia DPM
22
增加活动Insert Activity
• 选菜单或图标,出现对话框,点选相应活动类型 和对应Process节点,依次增加活动
DELMIA-装配仿真培训

备注:制造数字化处理模Leabharlann 里尽量勾选对应选型,便于 后续操作
工具-选项
许可证发放
勾选所需许可
二、仿真软件配置
7、许可证命令
装配仿真模拟 机器人模拟 人体活动分析 机器人仿真 格式转换许可 人体任务建模 人体姿态分析 人体建模
二、仿真软件配置
7、背景颜色更改
三、软件环境配置
1、创建ProcessLibrary(工艺库)
三、软件环境配置
3、导入仿真环境
格式转换
►建模完毕后,点击“文件” ►点击“导出” ►点击“STEP203”格式,出现导出提示窗口 ►选择合适的文件保存路径 ►点击“确定”
注意事项: 1.文件保存路径不能出现中文; 2.文件不能以中文命名,只能用字母或数字,尽量减少 符号的使用
三、软件环境配置
3、导入仿真环境
2.键盘 F3:显示或隐藏模型树;
二、仿真软件配置
5、用户自定义命令
自定义:自定义模块主要 是用来配置各模块,便于 后续进入装配仿真模块。
进入装配模拟模块
右侧工具条点击
工具-自定义
选择模块assembly Process Simlation
选中
确认关闭
二、仿真软件配置
5、用户自定义命令
装 配 重 点 模 块
二、仿真软件配置
3、PPR结构树
PPR结构树是进行装配仿真及人机仿真的操作核心,它 完整地集合了Process(工艺)、Product(产品)、 Resource(资源)三大模块。
Product:即产品模型,整个仿真过程的总目标; Resource:辅助产品进行生产制造的一切实物,如生产 线、工具、工装、物流车、工人等; Process:使用资源作用于产品的一系列活动,即工艺过 程,如车、铣、刨、磨、钳等。
基于DELMIA的机器人三维测量仿真
r o b o t ,i nc l u d ng i v i s i o n s e n s o r s , c a r d 0 o r , a n d me a s u r i n g c l a mp d e v i c e , e t c . , we r e b u i l t b y u s i n g‘ p a r t d e s i g n ’ wo r k b e n c h .
Ab s t r a c t :Th e s i mu l a i t o n o f 3 D me a s u r e me n t r e a l i z e d b y us i n g a r o b o t pl a y s a g r e a t r o l e n i i mp r o v ng i me a s re u me n t e ic f i e n c y , l o we r i ng me su a re me n t c o s t a n d s a t i s f yi n g t h e r e q u i r e me n t o f a u t o ma t e d p r o d u c io t n o fe n t e r p r i s e s . T h i s p a pe r g i v e s a d y n a mi c s i mu l a i t o n s y s t e m o ft he 3 D me a s re u me n t o f a c a r d o o r b y u s ng i DEL MI A s o f t wa r e . F i r s t l y , t h e mo d e l s o ft he
关键词 :机器人 ;三维测量;虚拟测量;测量仿真;D E L MI A
Delmia仿真入门PPT课件
文件夹;
4、硬解,将JS0GROUP.dll文件复制到安装目录下的
\win_b64\code\bin位置,粘贴覆盖原来的文件;
5、配置许可证,打开软件,单击确定,进入配置许可界面,
建议将所有许可勾选;
6、如果安装后看不到OPTION选项说明破解不成功,需要重
新卸载了再安装,可能重复2,3次才能成功。
2021/7/24
6
DELMIA认识
➢ 装配工艺仿真——每道工序中3D操作的详细规划 ➢ DELMIA/Process
Engineer Process Engineer PPR三维模型的显示 使得你能在你的工艺规划中开发三维产品、工艺 和资源模型。 ➢ 大大缩减产品的设计、批产周期。
2021/7/24
文件可以不安装。
2021/7/24
9
2.工作环境基本设置
➢工具→选项
2021/7/24
10
2.工作环境基本设置
➢ 第一次打开时将许可证可用的配置或产品列表全部勾选, 否则极有可能后续会影响软件的一些操作。
2021/7/24
11
2.工作环境基本设置
➢ 对下图画圈处进行设置,会大大降低操作时的卡顿
增加来自程序库的活动处理 连接活动
把一种新的属性添加到活动 把一种产品分配到一种活动
2021/7/24 把一种资源分配到一种活动
22
2.工作环境基本设置
➢ 常用操作工具条介绍
机器人点动
通过机器人底座或是目标签点动
机器人TCP示教
可到达性检查
计算导轨/台架值
设置工具
自动放置
TCP追踪,打开后可以显示TCP的运动轨迹,否则无
2021/7/24
Delmia机器人虚拟调试第一节 环境设置

Delmia机器人虚拟调试第一节环境设置
1、为了能够将指定的项目内部的子文档与父文档文件进行链接(打开一个Process,如出现内部子文档没有加载上,是由于原路径不符,无法链接内部子文档,通过加载可以将内部子文档进行链接)。
打开Delmia,工具—选项—常规—文档,选择其他文件夹,点击配置,在查找范围列表中选择需要查找的位置(可自行添加),然后点击添加,所添加的位置会按顺序显示在搜索顺序列表,确定;
2、显示—浏览,取消几何视图中进行预选择复选框,取消鼠标掠过物体自动进行选择;
3、基础结构—产品结构—CGR管理,CGR数据继承原数据内容,选上常规下面所有复选框;
4、基础结构—产品结构—高速缓存管理,选中使用高速缓存系统,建立磁盘缓冲,在缓冲文件夹下面会生成CGR轻量化文件,缓存大小设置为1024MB;
5、制造的数字化处理—树—层次结构树,选上下面所有的复选框;
6、安装JAVA运行环境,资源详细信息—Java设置,如下图(只有安装了Java才能进行机器人离线程序的导出);
7、the end。
Delmia仿真编程 第4节 创建资源库

Delmia机器人仿真编程第4节创建资源库在Catia或者Delmia软件中我们可以创建自己的资源库,将常用的资源全部分类加载到资源库中,比如机器人底座、自定义的机器人、焊钳等等都可以分类加载到资源库中,这样在使用时就可以直接从资源库中调用,即方便又快捷。
接下来我们就资源库的创建进行详细的讲解:1、资源库文件创建:打开Catia或者Delmia软件,切换到目录编辑器模块,将章节1(文件夹图标)名称修改为资源库,然后保存文件并命名为Resource,此文件将作为资源库文件。
在右侧工具栏中选择新建章节和系列命令,按下图所示进行新建并重新命名;2、完成以上操作步骤后,在中间视图窗口中点击参考按钮进行展开,可以看到所创建的系列和章节的名称、类型以及资源库所在位置等信息。
点击关键字进行展开,可以看到只有Name一列,我们可以自己添加关键字,增加资源的型号、资源的描述信息等等。
点击预览进行展开,此处可以自行设置各系列的预览图;3、添加关键字:点击添加关键字命令,弹出关键字定义对话框,输入关键字名称,类型选择字符串,然后点击确定。
在Name列表下选择焊枪系列,点击鼠标右键选择定义,添加焊枪的资源描述关键字,同理完成其他资源的关键字添加,完成后如下图所示;4、设置预览图:提前准备好各资源的图片,首先点击鼠标右键选择焊枪对象定义,弹出描述定义对话框,选择外部文件预览,完成后点击确定按钮。
同理添加其他章节和系列的预览图,完成后如下图所示;5、添加焊枪资源:首先添加弧焊焊枪资源,双击资源库章节下面的焊枪系列,然后选择添加部件命令,弹出描述定义对话框,点击选择文档按钮,弹出对话框选取焊枪文件,点击确定按钮完成焊枪资源的添加,同理在焊枪系列下添加不同规格型号的焊枪,完成后如下图所示;6、添加其他资源:参照上述步骤将其他资源全部添加进来,可以添加的资源文件类型有如下图中的5种,当资源添加进来后也可以进行关键字的添加(喉深、喉宽等信息)、预览图替换、名称修改等操作,完成后如下图所示;7、资源库浏览:当资源库创建完成后,可以打开目录浏览器对话框,浏览创建的资源库,想要查看那个系列只需在左侧结构树中双击鼠标左键,右侧窗口中即会显示改系列下所有的资源型号,如下图所示;以上就是在Catia或者Delmia软件中创建资源库的操作步骤,当然如果想要创建如螺丝、螺母等通过添加公式设计的零件库时,就需要先创建设计表,并在设计表(Excel格式)中添加第一列,名称为PartNumber。
Delmia仿真入门

8
1.软件安装
祥见:DELMAI V5R20安装包,里面也有安装说明,帮助
文件可以不安装。
9
2.工作环境基本设置
工具→选项
10
2.工作环境基本设置
第一次打开时将许可证可用的配置或产品列表全部勾选, 否则极有可能后续会影响软件的一些操作。
30
3、机器人运动机构建立
6.底座需要选择基本(Base),与第一轴之间的旋转选择 设计,X向前,Z轴向上
31
3、机器人运动机构建立
7.依次创建6个转动轴的坐标系:
32
3、机器人运动机构建立
7.对各个轴进行运动约束,本例为6轴机器人,故6个运动 副都为旋转运动
33
3、机器人运动机构建立
28
3、机器人运动机构建立
4.进入装置构建模块对每个创建运动机构(需要有CATIA 软件DMU的相应知识):
29
3、机器人运动机构建立
5.打开喜好框架(Tag Group),运用此按钮对每个零件 进行设置
先用此图标选择左边的A1零件创建坐标点(Tag)
再用此图标再已经创建的框架下进行框架类型的创建
通过插入 按钮将各 个动作添 加进去。
5、机器人点焊创建
设置焊枪的张开,闭合:
双击想要增加程序动作的工具条,在弹 出的新增程序动作属性栏中,选择 Retract设置焊枪的动作及动作时间。
5、机器人点焊创建
在创建机器人与焊枪的链接时,如果发现机器人TOOL坐 标跑了,创建失败,点到机器人树里,再刷新下TOOL即 可。
常用操作工具条介绍
-DELMIA培训教程 20090706版
DELMIA培训教程夏文俊,刘世平,黄滔第一章 学习要点在英文原版帮助中,需要重点关注以下几部分的帮助内容,这些是仿真中重点要使用的内容。
第二章 界面操作1、平移、转动、缩放操作:平移:按下“鼠标中键”并拖动;转动:按下“鼠标中键+鼠标右键”并拖动;缩放:按下“鼠标中键+Ctrl”并拖动。
2、快捷键F3:显示或隐藏模型树Alt+F8:启动宏运行窗口Ctrl+滚动鼠标中键:缩放模型树3、定制屏幕打开命令的路径:工具→定制。
(1)“开始菜单”选项卡。
将一些常用的workbench快捷方式放在开始菜单中,如下图所示。
(2)“工具栏”选项卡。
常用的有两个命令:恢复全部内容、恢复位置。
主要用于当我们工具栏中的一些工具条关闭但不知道从哪里恢复时的情况下。
4、“World Axis”、“Assembly Constraints”、“规格”和“罗盘”的隐藏与显示。
特别提到这几个的隐藏与显示,是因为在仿真运行中,这几个如果显示的话影响仿真的运行效果。
以上几个的现实与隐藏操作命令均处于“视图”菜单下,如下图所示。
5、“隐藏/显示”与“交换可见空间”命令的使用。
很多时候,为了方便,我们直接使用鼠标选择一个模型,然后隐藏,但是当我们想将隐藏的模型恢复可见时,才发现很难从模型树中将其找到,此时使用“交换可见空间”命令可以很方便的找到它。
例如:如下一个场景,直接选中绿色壳体并隐藏。
(绿色壳体对应着左边模型树中诸多几何体中的一个)初始场景情况处于哪个几何体下并被隐藏了的点击“交换可见空间”后出现如图所示的场景,此时我们选中该绿色壳体后选择“隐藏/显示”命令,该绿色壳体即从当前场景中消失,再点击“交换可见空间”命令,即可回到最初始的场景情形下。
6、“测量”命令中参数的选择当选择“测量”命令后,默认状态下的控制面板如下图所示:当我们需要知道沿某个轴向的距离时,需要定制一些参数。
如上图中,点击“定制”按钮,打开如下图所示的面板,按照需要选择不同的选项即可。
DELMIA机器人仿真教程
Position and Manipulate Compass Insert Products and Resources Snap and Attach
Create Tags Create Robot Tasks Use Teach and Jog Run a Robot Process Create Robot Task and Add Weld Gun Action
Using Manipulation Bounding Boxes Snapping Automatically to Selected Object Editing Positions
Factory Layout and Robotics / Device Task Definition
鼠标放置在罗 盘上,按住鼠 标左键不放拖 动罗盘到指定 的物体表面
机器人自由度限制颜色显示,当机器人运动超过了限制就会现实出对应的颜色
模拟路径显示设置
E
Digital Process for Manufacturing Settings
Tree Hierarchy Tree Fastener Process Planner Commands Fastener Visualization Showing the Fasteners
选上Tree/Hierarchy tree下面所 有的复选框
显示焊点
F
Options
Resource Detailing Settings
Robotic Task Display Options Update all Tasks Icon Teach Dialog Setting Offline Programming
Parameters and Measures Settings
DELMIA帮助文件

第1章 DPM的装配过程模拟简介通过本课程的学习,了解DELMIA数字化装配过程模拟。
1.创建DELMIA V5使用环境。
(1)根据将使用的工作台(workbench)选择定制启动(Start-Up)。
(2)学习如何识别,创造新的工具栏(Toolbars)并将其应用在各自的工作台(workbench)上,同时推广到所有可用的命令上。
(3)在所使用的配置中设置选项(Options)。
可以设置通用选项(GeneralOptions),标明驱动路径以及所需的特殊数据,核实许可(Licensing)和性能设置(Performance settings)。
设置细节层次(Level of Detail),偏好的可视化(Visualization Preferences)等显示选项(Display Options)。
通过参数(Parameters),定义的产品结构,生成报告(Report Generation),并设置使用单元(the Units)。
2.设定偏好的运作环境,现在将创建必要的工具来生成模拟。
(1)创建一个工具项目录(Project Catalog)和用于组装产品的资源。
此目录将存放资源文档。
在这一点上他们是一些表。
目录还包括了装配产品所必需的工具清单。
(2)编辑目录属性(Catalog Properties)。
i.在目录里运行关键字检索(Keyword Search),以便在目录中大量的清单里找到要查找的项目。
ii.详细说明执行装配的活动(Activities),并定义活动的属性(Attributes)以便进一步定义过程。
iii.然后进行观察,并在一个大的预先存在的目录进行练习,以证明保持目录的好处。
(3)创建一个进程库(Process Library)。
这是一个特殊进程的库。
它是为保存运行特殊进程时的数据记录。
(4)编辑一个过程库属性(Process Library Attribute)。
这些属性提供在库里扩充信息的方法,代表能进一步解释特殊活动特点的任何附加活动信息。
Delmia仿真教程弧焊仿真第2节机器人弧焊程序示教
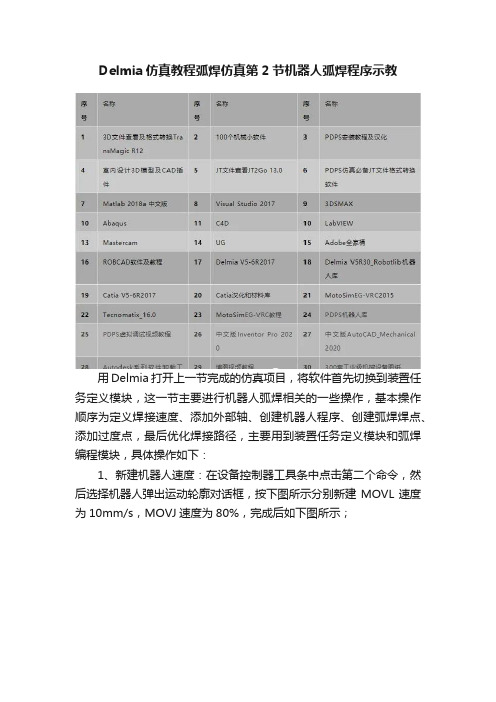
Delmia仿真教程弧焊仿真第2节机器人弧焊程序示教用Delmia打开上一节完成的仿真项目,将软件首先切换到装置任务定义模块,这一节主要进行机器人弧焊相关的一些操作,基本操作顺序为定义焊接速度、添加外部轴、创建机器人程序、创建弧焊焊点、添加过度点,最后优化焊接路径,主要用到装置任务定义模块和弧焊编程模块,具体操作如下:1、新建机器人速度:在设备控制器工具条中点击第二个命令,然后选择机器人弹出运动轮廓对话框,按下图所示分别新建MOVL速度为10mm/s,MOVJ速度为80%,完成后如下图所示;2、新建运动精度:在设备控制器工具条中点击第三个命令,然后选择机器人弹出运动轮廓对话框,按下图所示新建精度等级,完成后如下图所示;3、添加外部轴:点击设备控制器工具条中的定义辅助设备命令,弹出对话框选择机器人1和变位机,将变位机作为机器人1的外部轴,如下图所示外部轴添加完成后机器人控制器下面会出现辅助设备节点;4、创建机器人程序:在顺序工具条中点击第一个命令New Task,然后选择机器人创建机器人焊接任务,并重新命名,如下图所示在机器人下面出现程序节点;5、新建标记组:在标记工具条中点击第一个命令,然后选择产品Date弹出标记组对话框,链接模式选择修改参考,点击确定按钮后在产品Date下面将新建一个标记组。
若链接模式选择局部则标记组将被创建在总资源节点ResourcesList下面;6、创建弧焊焊点:将软件切换到弧焊编程模块,产品展示修改为设计模式。
点击标记工具条中倒数第二个命令,弹出创建弧形标记对话框,首先分别定义曲线和曲面,点击曲线或者曲面后会弹出工具控制板对话框,按住Ctrl键进行多选,完成后会出现图中所示的开始和结束绿色箭头(即焊道的起始点和结束点),按住鼠标拖动箭头可调整开始和结束位置。
产品必须是catia格式的文件不能是cgr格式,否则无法进行此操作。
标记组选择之前创建在产品下面的标记组,这样变位机在转动时焊道会随着产品一起转动。
DELMIA-人机仿真培训

►接搬运一模拟结果,重新创建任务“搬运二”,
将任务分配给“工序三”。
点击“Pick up” 命令,选取桌子作为拾取物,
点击“modify activity” ,图1.
图2
点击“姿态调整” ,将手抬起,图2。
点击“行走” 命令,调整行动轨迹,图3。
点击“Pick down” 命令,放下桌子,图4.
图4
之间插入此功能,不用进行任何设置即可实现两位置
点间的直线行走,简单快捷,前提是两位置点间不能
有障碍物,以免发生干涉
人机仿真练习
搬运动作指令一 图1
DELMIA人体仿真搬运动作实质上是通过工程
师创建物体移动动作,同时通过伴随轨迹命令自动
模拟出搬运动作。
►创建搬运环境,详细略(同前面)图1.
►进入“DPM”装配模拟模块,图2。
拟播放,效果如动图(图4)
软件基础配置
人体模型行走动作编辑- human task simulation
1.普通行走动作
图1
►点击“HumanTask.1”使文字背景高亮显示,
图 3
再点击 RuleBasedWalk(基于规则的行走)
功能图标,表示要在“HumanTask.1”中进行
人体行走动作创建(图1)
新建人体 模型
输出报告
改变外观 显示
增加描述
增加负载
插入新的偏 移量
人体行为定 义
打开视觉显 示
计算可达 性
保存
姿势编辑
向前运动 姿势调整 握手姿态 位置模式
坐姿
软件基础配置
人体模型搭建- human builder Workbench
新建人体模型操作讲解: ➢ 点击“新建人体模型”,在模型树选
夏文俊-DELMIA培训教程+20090706版
DELMIA培训教程夏文俊,刘世平,黄滔第一章 学习要点在英文原版帮助中,需要重点关注以下几部分的帮助内容,这些是仿真中重点要使用的内容。
第二章 界面操作1、平移、转动、缩放操作:平移:按下“鼠标中键”并拖动;转动:按下“鼠标中键+鼠标右键”并拖动;缩放:按下“鼠标中键+Ctrl”并拖动。
2、快捷键F3:显示或隐藏模型树Alt+F8:启动宏运行窗口Ctrl+滚动鼠标中键:缩放模型树3、定制屏幕打开命令的路径:工具→定制。
(1)“开始菜单”选项卡。
将一些常用的workbench快捷方式放在开始菜单中,如下图所示。
(2)“工具栏”选项卡。
常用的有两个命令:恢复全部内容、恢复位置。
主要用于当我们工具栏中的一些工具条关闭但不知道从哪里恢复时的情况下。
4、“World Axis”、“Assembly Constraints”、“规格”和“罗盘”的隐藏与显示。
特别提到这几个的隐藏与显示,是因为在仿真运行中,这几个如果显示的话影响仿真的运行效果。
以上几个的现实与隐藏操作命令均处于“视图”菜单下,如下图所示。
5、“隐藏/显示”与“交换可见空间”命令的使用。
很多时候,为了方便,我们直接使用鼠标选择一个模型,然后隐藏,但是当我们想将隐藏的模型恢复可见时,才发现很难从模型树中将其找到,此时使用“交换可见空间”命令可以很方便的找到它。
例如:如下一个场景,直接选中绿色壳体并隐藏。
(绿色壳体对应着左边模型树中诸多几何体中的一个)初始场景情况处于哪个几何体下并被隐藏了的点击“交换可见空间”后出现如图所示的场景,此时我们选中该绿色壳体后选择“隐藏/显示”命令,该绿色壳体即从当前场景中消失,再点击“交换可见空间”命令,即可回到最初始的场景情形下。
6、“测量”命令中参数的选择当选择“测量”命令后,默认状态下的控制面板如下图所示:当我们需要知道沿某个轴向的距离时,需要定制一些参数。
如上图中,点击“定制”按钮,打开如下图所示的面板,按照需要选择不同的选项即可。