板球系统实验指导书(MATLAB)
MATLAB实验指导书

实验一熟悉MATLAB工作环境一、实验目的初步熟悉MATLAB工作环境,熟悉命令窗口,学会使用帮助窗口查找帮助信息。
二、实验内容(1)熟悉MATLAB平台的工作环境;(2)熟悉MATLAB的五个工作窗口;(3)了解MATLAB的数值显示格式设置。
(4)学会使用帮助三、实验步骤1.熟悉MATLAB的五个基本窗口①命令窗口(Command window)②工作空间窗口(Workspace)③命令历史记录窗口(Command history)④当前目录窗口(Current directory)⑤帮助窗口(Help window)2.MATLAB的数值显示格式设置用户可根据需要,对命令窗口的字体风格、大小、颜色和数值计算结果的显示格式进行设置。
①屏幕显示方式屏幕显示方式有紧凑(compact)和松散(loose)两种形式,默认为松散(loose)格式。
具体设置格式为:format compact/loose②数字显示格式数字显示格式有大致有:长、短整型、长、短浮点、近似有理数、十六进制数以及银行数等表示方式。
具体设置为:format long(long e\long g) %长整型、长浮点、以最佳方式显示数据format short(short e\ short g) %短整型、短浮点、以最佳方式显示数据format hex %显示十六进制数format bank %金融数语(元、角、分)表示数据3.帮助信息的使用MATALB的帮助信息可通过以下两种方式得到:①从菜单工具栏得到单击工具栏的图标或选择菜单view\help (help\matlab help),都能启动帮助窗口,然后选择你所需要的帮助信息。
②命令窗口发布命令得到在命令窗口的提示符后输入help 需要帮助的命令关键字,即可得到该关键字的所有信息。
其格式如下:help 命令关键字例如:help clear键入enter键后,则在命令窗口显示出具体的命令格式,说明等信息。
MATLAB实验指导书(DOC)

MATLAB实验指导书(DOC)MATLAB实验指导书前⾔MATLAB程序设计语⾔是⼀种⾼性能的、⽤于科学和技术计算的计算机语⾔。
它是⼀种集数学计算、分析、可视化、算法开发与发布等于⼀体的软件平台。
⾃1984年MathWorks公司推出以来,MATLAB以惊⼈的速度应⽤于⾃动化、汽车、电⼦、仪器仪表和通讯等领域与⾏业。
MATLAB有助于我们快速⾼效地解决问题。
MATLAB相关实验课程的学习能加强学⽣对MATLAB程序设计语⾔理解及动⼿能⼒的训练,以便深⼊掌握和领会MATLAB应⽤技术。
⽬录基础型实验............................................................................................ - 1 - 实验⼀MATLAB集成环境使⽤与基本操作命令练习............. - 1 - 实验⼆MATLAB中的数值计算与程序设计 ............................. - 7 - 实验三MATLAB图形系统......................................................... - 9 -基础型实验实验⼀ MATLAB 集成环境使⽤与基本操作命令练习⼀实验⽬的熟悉MATLAB 语⾔编程环境;熟悉MATLAB 语⾔命令⼆实验仪器和设备装有MATLAB7.0以上计算机⼀台三实验原理MATLAB 是以复杂矩阵作为基本编程单元的⼀种程序设计语⾔。
它提供了各种矩阵的运算与操作,并有较强的绘图功能。
1.1基本规则1.1.1 ⼀般MATLAB 命令格式为[输出参数1,输出参数2,……]=(命令名)(输⼊参数1,输⼊参数2,……)输出参数⽤⽅括号,输⼊参数⽤圆括号如果输出参数只有⼀个可不使⽤括号。
1.1.2 %后⾯的任意内容都将被忽略,⽽不作为命令执⾏,⼀般⽤于为代码加注释。
MATLAB实验指导
MATLAB基础教程实验指导书实验一:Desktop操作桌面基础一、实验目的及要求1、熟悉MATLAB系统的安装流程,掌握MATLAB的启动和退出。
2、掌握MATLAB系统的各命令窗口的功能,熟悉常用选项和工具栏的功能和用途。
3、熟悉简单程序的输入、运行、调试及结果的显示过程。
二、实验内容1、认识MATLAB集成环境:熟悉个操作窗口的功能和用途。
掌握File(文件)、Edit(编辑)、View(显示)、Web(网络)、Window(窗口)和Help(帮助) 等菜单命令的使用。
2、启动和退出MATLAB(1)启动MATLAB的M文件。
在启动MATLAB时,系统可自动执行主M文件matlabrc.m,在matlabrc.m的末尾还会检测是否存在startup.m,如存在则会自动执行它。
在网络系统中,matlabrc.m保留给系统管理员,而各个用户可利用startup.m进行初始设置。
(2)、终止或退出MATLAB。
quit命令可终止MATLAB,但不保存工作空间的内容。
为保存工作空间的内容,可使用save命令。
1、利用save、load命令,保存和恢复工作空间。
用clear命令可清空工作空间。
(1)、工作空间中的变量可以用save命令存储到磁盘文件中。
(2)、用load命令可将变量从磁盘文件读入MATLAB的工作空间。
(3)、用clear命令可清除工作空间中现存的变量。
4、MATLAB的所有图形工具窗体都可以嵌入MATLAB窗体(Dock),也可以从MATLAB窗体中弹出(Undock),例如在MATLAB默认的图形窗体环境下,单击命令行窗体左上角按钮,就可以将MATLAB命令行窗体弹出。
要求分别将命令行窗体(Command Window)、命令行历史窗体(Command History)、当前路径查看器(Current Directory)、工作空间浏览器(Workspace Browser)、帮助(Help)、MATLAB性能剖析工具(Profiler) 从MATLAB窗体中弹出和嵌入MATLAB窗体(Dock)。
MATLAB实验指导书(共5篇)

MATLAB实验指导书(共5篇)第一篇:MATLAB实验指导书MATLAB 实验指导书皖西学院信息工程学院实验一 MATLAB编程环境及简单命令的执行一、实验目的1.熟悉MATLAB编程环境二、实验环境1.计算机2.MATLAB7.0集成环境三、实验说明1.首先应熟悉MATLAB7.0运行环境,正确操作2.实验学时:2学时四、实验内容和步骤1.实验内容(1)命令窗口的使用。
(2)工作空间窗口的使用。
(3)工作目录、搜索路径的设置。
(4)命令历史记录窗口的使用。
(5)帮助系统的使用。
(6)了解各菜单的功能。
2.实验步骤(1)启动MATLAB,熟悉MATLAB的桌面。
(2)进入MATLAB7.0集成环境。
(3)在命令窗口执行命令完成以下运算,观察workspace的变化,记录运算结果。
1)(365-52⨯2-70)÷3 2)>>area=pi*2.5^2 3)已知x=3,y=4,在MATLAB中求z:x2y3 z=2(x-y)4)将下面的矩阵赋值给变量m1,在workspace中察看m1在内存中占用的字节数。
⎡162313⎤⎢511108⎥⎥m1=⎢⎢97612⎥⎢⎥414151⎣⎦执行以下命令>>m1(2 , 3)>>m1(11)>>m1(: , 3)>>m1(2 : 3 , 1 : 3)>>m1(1 ,4)+ m1(2 ,3)+ m1(3 ,2)+ m1(4 ,1)5)执行命令>>helpabs 查看函数abs的用法及用途,计算abs(3 + 4i)6)执行命令>>x=0:0.1:6*pi;>>y=5*sin(x);>>plot(x,y)7)运行MATLAB的演示程序,>>demo,以便对MATLAB有一个总体了解。
五、思考题1、以下变量名是否合法?为什么?(1)x2(2)3col(3)_row (4)for2、求以下变量的值,并在MATLAB中验证。
MATLAB实验指导书
实验一、Matlab 软件的安装与基本使用一、实验目的和要求:学会MATLAB 软件的安装方法,熟悉MA TLAB 的工作环境及其基本功能的设置,以及基本指令的使用,了解MATLAB 数值数组及其矩阵操作的使用、复数的输入方法,了解基本的绘图函数程序。
二、实验内容和步骤:1、完成MATLAB 软件的安装。
2、安装完成后启动MA TLAB 软件,熟悉MATLAB 的工作环境。
打开MATLAB 7,默认打开的窗口包括: (1)命令窗口(Command Window); (2)命令历史窗口(Command History); (3)工作间管理窗口(Workspace); (4)当前路径窗口(Current Directory)此外,还有捷径键、编译窗口、图形窗口和帮助窗口等其他种类的窗口,结合课本实例,熟悉每个窗口的功能和基本使用。
3、(1)求23)]47(212[÷-⨯+的运算结果,注意命令后有无分号的作用。
命令及结果如下:(2)求20012x x v t a t =++的值,其中t=5s 、010x m =、015/v m s =、29.81/sec a m =-。
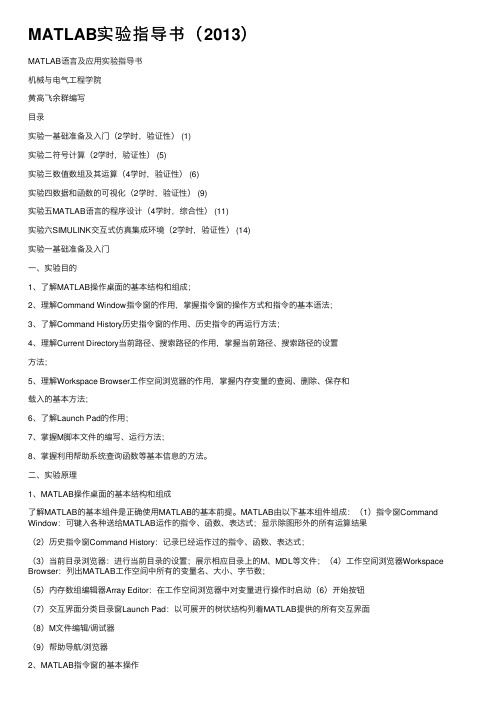
命令及结果如下:(3) 设3x =, 4v =,用MATLAB 命令求下列格式的值: 1)22log()x v +2)(2)x v -3) |sin 2|vx e4) eps 5)34x v --命令及结果如下:4、比较以下三种不同的输入矩阵1234246836912a ⎛⎫⎪= ⎪ ⎪⎝⎭的方法,运行并观察实验结果,掌握矩阵的基本输入方法。
>> a=[1 2 3 42 4 6 83 6 9 12]>> a = [1:4; 2:2:8; 3:3:12]>> a1 =[1:4]; a = [a1; 2*a1; 3*a1]5、输入复数矩阵⎥⎦⎤⎢⎣⎡-+++=i ii i24356223B ,并求其实部、虚部、模和幅角(分别用弧度和角度表示),了解MATLAB 向量化运算的特点。
matlab实验指导书
MATLAB实验指导书指导老师许承东实验一MATLAB基本操作实验目的1、熟悉MATLAB的工作环境;2、掌握MATLAB常用的操作运算符和一些基本操作;3、学会编写M文件。
实验内容e sin3t,其中t的取值范围为[0,4π]。
1、绘制衰减图线y=5.2/t(1)启动MATLAB,如图1.1所示。
图1.1 MATLAB的工作环境(2)直接在命令窗口输入以下代码:(3)程序执行后显示的衰减振荡曲线如图1.2所示。
图1.2 衰减振荡曲线(4)生成M文件。
在历史命令窗口中选中上面所写代码,单击鼠标右键,在弹出菜单中选择Create M-File菜单项,即可创建为M文件,将文件命名为quxian.m保存。
2、向量化和循环结构的比较(1)从工具栏中单击New M-file图标,或从菜单中选择File/New/M-File创建新的M文件,如图1.3所示。
图1.3 创建新的M文件(2)在M文件编辑器中输入以下代码:(3)保存运行。
将文件名改为vectorize_contrast.m保存。
单击Run 命令或直接按F5执行。
(4)执行结果实验二MATLAB基本图形绘制实验目的1、掌握MATLAB二维图形的绘制;2、掌握MATLAB三维图形的绘制。
实验内容1、二维图形的绘制(1)从工具栏中单击New M-file图标,或从菜单中选择File/New/M-File创建新的M文件。
(2)在M文件编辑器中输入以下代码:(3)保存运行。
将文件名改为example_plot.m保存。
单击Run命令或直接按F5执行。
(4)二维图形绘制结果如图2.1所示。
图2.1 二维图形绘制结果2、三维曲面绘制(1)从工具栏中单击New M-file图标,或从菜单中选择File/New/M-File创建新的M文件。
(2)在M文件编辑器中输入以下代码:(3)保存运行。
将文件名改为matlab_script.m保存。
单击Run命令或直接按F5执行。
MATLAB实验指导书(2013)
MATLAB实验指导书(2013)MATLAB语⾔及应⽤实验指导书机械与电⽓⼯程学院黄⾼飞余群编写⽬录实验⼀基础准备及⼊门(2学时,验证性) (1)实验⼆符号计算(2学时,验证性) (5)实验三数值数组及其运算(4学时,验证性) (6)实验四数据和函数的可视化(2学时,验证性) (9)实验五MATLAB语⾔的程序设计(4学时,综合性) (11)实验六SIMULINK交互式仿真集成环境(2学时,验证性) (14)实验⼀基础准备及⼊门⼀、实验⽬的1、了解MATLAB操作桌⾯的基本结构和组成;2、理解Command Window指令窗的作⽤,掌握指令窗的操作⽅式和指令的基本语法;3、了解Command History历史指令窗的作⽤、历史指令的再运⾏⽅法;4、理解Current Directory当前路径、搜索路径的作⽤,掌握当前路径、搜索路径的设置⽅法;5、理解Workspace Browser⼯作空间浏览器的作⽤,掌握内存变量的查阅、删除、保存和载⼊的基本⽅法;6、了解Launch Pad的作⽤;7、掌握M脚本⽂件的编写、运⾏⽅法;8、掌握利⽤帮助系统查询函数等基本信息的⽅法。
⼆、实验原理1、MATLAB操作桌⾯的基本结构和组成了解MATLAB的基本组件是正确使⽤MATLAB的基本前提。
MATLAB由以下基本组件组成:(1)指令窗Command Window:可键⼊各种送给MATLAB运作的指令、函数、表达式;显⽰除图形外的所有运算结果(2)历史指令窗Command History:记录已经运作过的指令、函数、表达式;(3)当前⽬录浏览器:进⾏当前⽬录的设置;展⽰相应⽬录上的M、MDL等⽂件;(4)⼯作空间浏览器Workspace Browser:列出MATLAB⼯作空间中所有的变量名、⼤⼩、字节数;(5)内存数组编辑器Array Editor:在⼯作空间浏览器中对变量进⾏操作时启动(6)开始按钮(7)交互界⾯分类⽬录窗Launch Pad:以可展开的树状结构列着MATLAB提供的所有交互界⾯(8)M⽂件编辑/调试器(9)帮助导航/浏览器2、MATLAB指令窗的基本操作MATLAB指令窗给⽤户提供了最直接的交互界⾯,可⽤于输⼊和执⾏指令、显⽰指令运⾏结果、调试MATLAB程序等常⽤的MATLAB仿真计算功能。
Matlab实验指导书(含答案)详解
实验一:Matlab操作环境熟悉一、实验目的1.初步了解Matlab操作环境。
2.学习使用图形函数计算器命令funtool及其环境。
二、实验内容熟悉Matlab操作环境,认识命令窗口、内存工作区窗口、历史命令窗口;学会使用format命令调整命令窗口的数据显示格式;学会使用变量和矩阵的输入,并进行简单的计算;学会使用who和whos命令查看内存变量信息;学会使用图形函数计算器funtool,并进行下列计算:1.单函数运算操作。
➢求下列函数的符号导数(1) y=sin(x);(2) y=(1+x)^3*(2-x);➢求下列函数的符号积分(1) y=cos(x);(2) y=1/(1+x^2);(3) y=1/sqrt(1-x^2);(4) y=(x-1)/(x+1)/(x+2);➢求反函数(1) y=(x-1)/(2*x+3);(2) y=exp(x);(3) y=log(x+sqrt(1+x^2));➢代数式的化简(1) (x+1)*(x-1)*(x-2)/(x-3)/(x-4);(2) sin(x)^2+cos(x)^2;(3) x+sin(x)+2*x-3*cos(x)+4*x*sin(x);2.函数与参数的运算操作。
➢从y=x^2通过参数的选择去观察下列函数的图形变化(1) y1=(x+1)^2(2) y2=(x+2)^2(3) y3=2*x^2(4) y4=x^2+2(5) y5=x^4(6) y6=x^2/23.两个函数之间的操作➢求和(1) sin(x)+cos(x)(2) 1+x+x^2+x^3+x^4+x^5➢乘积(1) exp(-x)*sin(x)(2) sin(x)*x➢商(1) sin(x)/cos(x);(2) x/(1+x^2);(3) 1/(x-1)/(x-2);➢求复合函数(1) y=exp(u) u=sin(x)(2) y=sqrt(u) u=1+exp(x^2)(3) y=sin(u) u=asin(x)(4) y=sinh(u) u=-x三、设计提示1.初次接触Matlab应该注意函数表达式的文本式描述。
《MATLAB及应用》实验指导书

《MATLAB及应⽤》实验指导书《MATLAB及应⽤》实验指导书班级:姓名:学号:总评成绩:汽车⼯程系电测与汽车数字应⽤中⼼⽬录实验04051001 MATLAB语⾔基础 (1)实验04051002 MATLAB科学计算及绘图 (4)实验04051003 MATLAB综合实例编程 (6)实验04051001 MATLAB语⾔基础1实验⽬的1)熟悉MA TLAB的运⾏环境2)掌握MA TLAB的矩阵和数组的运算3)掌握MA TLAB符号表达式的创建4)熟悉符号⽅程的求解2实验内容(任选6题)1.利⽤rand等函数产⽣下列矩阵:产⽣⼀个均匀分布在(-5,5)之间的随机阵(50×2),要求显⽰精度为精确到⼩数点后⼀位(精度控制指令为format)。
2.在⼀个已知的测量矩阵T(100×100)中,删除整⾏全为0的⾏,删除整列内容全为0的整列(判断某列元素是否为0⽅法:检查T(: , i) .* (T(: , j))是否为0)。
3.假设汽车系在下列各年度的⼈⼝统计如表所⽰试⽤⼀个⼆维矩阵STU表⽰上述数据,并请计算出下列各数值:(1)汽车系在2002~2006年之间的每年平均新⽣、毕业⽣⼈数。
(2)5年来汽车系共有多少毕业⽣?(3)在哪⼏年,新⽣数⽬⽐毕业⽣多?(4) 5年来每年的毕业⽣对新⽣的⽐例平均值为何? 4. 完成下列矩阵运算:(1)使⽤randn 产⽣⼀个(10×10)的矩阵A(2)计算B=(A+A ’)/2。
请注意,B ⼀定是⼀个对称矩阵(3)计算矩阵B 的特征向量e 1 e 2 … e 10(使⽤函数eig )(4)验证在i 不等于j 的情况下,e i 和e j 的内积必定为05. 下列 MA TLAB 语句⽤于画出函数 x 0.2e 2)-=y(x 在 [0, 10] 的值。
x = 0:0.1:10; y = 2*exp(-0.2*x); plot(x, y);利⽤ MA TLAB 的M-⽂件编辑器创建⼀个新的 M-⽂件,输⼊上述代码,保存为⽂件test1.m 。
《MATLAB程序设计》实验指导书
三、
实验仪器和设备
1、 计算机一台。 2、 MATLAB7.0 以上集成环境。
四、
预习要求
2
《MATLAB 程序设计》实验指导书
1、 复习 MATLAB 的启动与Байду номын сангаас出,熟悉 MATLAB 运行环境。 2、 复习 MATLAB 中矩阵的生成以及矩阵运算的基本原理。
五、
实验内容及步骤
实验内容:
1、 求下列表达式的值 1) z1
5
《MATLAB 程序设计》实验指导书
2) 函数调用 函数文件编制好后,就可调用函数进行计算了。函数调用的一般格式为 [输出实参表]=函数名(输入实参表) 注意:函数调用时各实参出现的顺序、个数,应与函数定义时形参的顺序、个 数一致,否则会出错。函数调用时,实参先传递给形参,然后再执行函数功能。 5、 选择结构 1) if 语句 a) 单分支 if 语句 if 条件 语句块 end b) 双分支 if 语句 if 条件 语句块 1 else 语句块 2 end c) 多分支 if 语句 if 条件 1 语句块 1 elseif 条件 2 语句块 2 …… elseif 条件 n 语句块 n else 语句块 n+1 end 2) switch 语句 switch 表达式 case 结果表 1 语句块 1 case 结果表 2 语句块 2 ……
二、
实验原理
1、 M 文件 用 MATLAB 语言编写的程序,称为 M 文件,它们的扩展名均为.m。M 文件根据 调用方式的不同分为两类,命令文件(Script file)和函数文件(Function file) 。 2、 建立新的 M 文件 启动 MATLAB 文本编辑器有 3 种方法: 1) 单击工具栏上的“New M-File”命令按钮。 2) 从 MATLAB 主窗口的“File”菜单中选择“New”菜单项,再选择“M-file”命令。 3) 在 MATLAB 命令窗口输入命令“edit”。 3、 打开已有的 M 文件 1) 在当前目录窗口选中要打开的 M 文件,双击鼠标左键。 2) 单击 MATLAB 主窗口工具栏上的“Open File”命令按钮,再从弹出的对话框中 选择所需打开的 M 文件。 3) 从 MATLAB 主窗口的“File”菜单中选择“Open”命令,在“Open”对话框中选中 所需打开的文件。 4) 在 MATLAB 命令窗口输入命令“edit 文件名” 。 4、 函数文件 1) 函数文件的基本结构 函数文件由 function 语句引导,其基本结构为: function 输出形参表=函数名(输入形参表) 注释说明部分 函数体语句 注意:函数名的命名规则与变量名相同。当输出形参多于一个时,应用方括号 括起来。
matlab及应用实验指导书

语句。第一次通过 For 循环 n=1,第二次,n=2,如此继续,直至 n=10。在 n=10
以后,For 循环结束,然后执行 end 语句后面的任何命令。注意,该循环结束后
n=10。
For 循环的其它重要特点是: (1)For 循环不能用 For 循环内重新赋值循环变量 n 来终止。
二、实验内容
1、For 循环
For 循环的一般形式是:
for x =array 语句 end
在 for 和 end 语句之间的语句按数组中的每一列执行一次。在每一次迭代中,
x 被指定为数组的下一列,即在第 n 次循环中,x=array(:, n)。例如,
for n=1:10 x(n)=sin(n*pi/10); end x
语句 1。假如有两个选择,If-Else-End 结构是:
if 表达式 1 语句 1 Else 语句 2 end
在这里,如果表达式 1 为真,则执行语句 1;如果表达式是假,则执行语句
2。当有三个或更多的选择时,If-Else-End 结构采用形式
if 表达式 1 语句 1 Else if 表达式 2 语句 2 Else if 表达式 3 语句 3 Else if 表达式 4 语句 4 Else if …… else 语句 end
1、从屏幕上输入矩阵 A=[1 2 3;4 5 6;7 8 9],或 A=[1,2,3;4,5,6;7,8,9]。 观察输出结果。
2、试用回车代替分号,观察输出结果。 3、输入矩阵 B=[9,8,7;6,5,4;3,2,1],C=[4,5,6;7,8,9;1,2,3],键入 A,B, C 观察结果。 4、选择 File|new 菜单中的 M-file,输入:name=[9 ,8,7;6,5,4;3,2,1], 保存为“xingming.m”文件,退出编辑环境。此时在工作环境中使用 xingming 命令就可调出姓名矩阵。 5、再试着输入一些矩阵,矩阵中的元素可为任意表达式,但注意矩阵中各 行各列的元素个数需分别相等,否则会给出出错信息。 6、输入 who 和 whos 观察结果,了解其作用;熟悉 help 命令用法。 (二)运算符及基本序列运算 1、数组的加减乘除和乘方运算 输入 A=[1 2 3],B=[4 5 6],求 C=A+B,D=A-B,E=A.*B,F=A./B,G=A.^B, 并用 stem 分别画出 A,B,C,D,E,F,G。再输入一些数组,进行类似运算(注 意大小写字母的不同)。 2、输入 B=[9,8,7;6,5,4;3,2,1]
Matlab实验指导书(实验一)
MATLAB实验指导书编著:李新平二零零八年三月十四日实验一、基础知识1.1MATLAB 简介MA TLAB 名字由 MAT rix 和 LAB oratory 两词的前三个字母组合而成。
那是 20 世纪七 十年代后期的事:时任美国新墨西哥大学计算机科学系主任的 Cleve Moler 教授出于减轻学 生编程负担的动机,为学生设计了一组调用 LINPACK 和 EISPACK 库程序的“通俗易用”的 接口,此即用 FORTRAN 编写的萌芽状态的 MA TLAB。
经几年的校际流传,在 Little的推动下,由 Little、Moler、Steve Bangert 合作,于 1984 年成立了 MathWorks 公司,并把 MA TLAB 正式推向市场。
从这时起,MA TLAB 的内核采 用 C 语言编写,而且除原有的数值计算能力外,还新增了数据图视功能。
MA TLAB 以商品形式出现后,仅短短几年,就以其良好的开放性和运行的可靠性,使 原先控制领域里的封闭式软件包(如英国的 UMIST,瑞典的 LUND 和 SIMNON,德国的 KEDDC)纷纷淘汰,而改以MA TLAB 为平台加以重建。
在时间进入 20 世纪九十年代的时 候,MA TLAB 已经成为国际控制界公认的标准计算软件。
在欧美大学里,诸如应用代数、数理统计、自动控制、数字信号处理、模拟与数字通信、时间序列分析、动态系统仿真等课程的教科书都把 MA TLAB 作为内容。
这几乎成了九十年 代教科书与旧版书籍的区别性标志。
在那里,MATLAB 是攻读学位的大学生、硕士生、博 士生必须掌握的基本工具。
在国际学术界,MATLAB 已经被确认为准确、可靠的科学计算标准软件。
在许多国际 一流学术刊物上,(尤其是信息科学刊物),都可以看到 MA TLAB 的应用。
在设计研究单位和工业部门,MA TLAB 被认作进行高效研究、开发的首选软件工具。
如美国 National Instruments 公司信号测量、分析软件LabVIEW,Cadence公司信号和通信分 析设计软件 SPW等,或者直接建筑在 MA TLAB 之上,或者以 MA TLAB 为主要支撑。
MATLAB实验指导书

实验一:MATLAB的基本操作一、实验目的:1.熟悉MATLAB操作环境2.熟悉MATLAB的帮助3.熟悉MATLAB矩阵的操作4.熟悉MATLAB基本运算二、实验内容:1.自行设计试题,说明三角函数是按弧度还是按角度计算。
2.找出取整的函数,并自行设计试题,说明它们的区别。
3.自行设计试题,说明如何给矩阵按列符值。
4.自行设计试题,建一个5X5矩阵,然后将第一行乘1,第二行乘2,第三行乘3,第四行乘4,第五行乘5。
5.设计编写程序(命令),解方程3x5-7x4+5x2+2x-18=0。
6.自行设计试题,说明eval()函数的功能。
三、实验原理:ceil(x)= -4 -2 0 2 5 7fix(x) = -4 -2 0 1 4 6floor(x) = -5 -3 -1 1 4 6round(x) = -5 -2 0 1 5 72、系统的在线帮助help 命令:(1).当不知系统有何帮助内容时,可直接输入help以寻求帮助:>> help(回车)(2).当想了解某一主题的内容时,如输入:>> help syntax(了解Matlab的语法规定)(3).当想了解某一具体的函数或命令的帮助信息时,如输入:>> help sqrt (了解函数sqrt的相关信息)lookfor命令现需要完成某一具体操作,不知有何命令或函数可以完成,如输入:>> lookfor line (查找与直线、线性问题有关的函数)3、常量与变量系统的变量命名规则:变量名区分字母大小写;变量名必须以字母打头,其后可以是任意字母,数字,或下划线的组合。
此外,系统内部预先定义了几个有特殊意义和用途的变量,见下表:数值型向量(矩阵)的输入(1).任何矩阵(向量),可以直接按行方式...输入每个元素:同一行中的元素用逗号(,)或者用空格符来分隔;行与行之间用分号(;)分隔。
所有元素处于一方括号([ ])内;例1-1:>> Time = [11 12 1 2 3 4 5 6 7 8 9 10]>> X_Data = [2.32 3.43;4.37 5.98](2).系统中提供了多个命令用于输入特殊的矩阵:上面函数的具体用法,可以用帮助命令help得到。
matlab实验指导书

MATLAB实验指导书机电工程学院实验一 熟悉MATLAB 环境认识MA TLAB一、 实验目的熟悉matlab 的安装与启动;熟悉matlab 用户界面;熟悉matlab 功能、建模元素;熟悉matlab 优化建模过程。
二、 实验设备与仪器1.微机2.matlab 仿真软件三、 实验步骤1. 了解matlab 的硬件和软件必备环境;2. 启动matlab ;3. 熟悉标题栏,菜单栏,工具栏,元素选择窗口,状态栏,控制栏以及系统布局区;4. 学习优化建模过程。
四、 实验报告要求1. 写出matlab 系统界面的各个构成;以及系统布局区的组成;以及每一部分的功能;2. 优化建模过程应用举例五、实验内容(一)、Matlab 操作界面1. 命令窗口(command window )2. 命令历史窗口(command history )3. 工作空间管理窗口(workspace )4. 当前路径窗口(current directory )(二)、实现下列优化建模过程1、简单矩阵⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=987654321A 的输入步骤。
2、矩阵的分行输入。
A=[1,2,34,5,67,8,9]3、指令的续行输入S=1-1/2+1/3-1/4+ ... 1/5-1/6+1/7-1/84、画出2222)sin(yx y x z ++=所表示的三维曲面。
y x ,的取值范围是]8,8[-。
6、复数矩阵的生成及运算A=[1,3;2,4]-[5,8;6,9]*iB=[1+5i,2+6i;3+8*i,4+9*i] C=A*B实验二 MATLAB 运算基础一、实验目的及要求1.掌握建立矩阵的方法。
2.掌握MATLAB 各种表达式的书写规则以及常用函数的使用。
二、 实验设备与仪器1.微机2.matlab 仿真软件三、实验原理1.矩阵的建立方法(1)直接输入法:将矩阵的元素用方括号括起来,按矩阵行的顺序输入各元素,同一行的各元素之间用空格或逗号分隔,不同行的元素之间用分号分隔。
matlab实验指导书

实验一 MATLAB语言环境的使用一、实验目的:1.了解MATLAB的安装;2.掌握MATLAB的开发环境;3.熟悉MATLAB文件编辑器。
二、实验装置:计算机三、实验内容:1.熟悉命令窗口的功能命令窗口的参数设置(1)在命令窗口中,直接键入命令或函数,系统自动反馈信息或结果。
如键入18+(5*sin(pi/6))/(2+cos(pi/6)),按Enter键,即可得到计算结果:ans=18.8723 。
(2)若想修改上式,不必逐一重新输入,只需按一次↑键,调入已经输入的语句加以修改即可。
(3)使用clc命令清楚命令窗口显示内容,但不清除工作空间中的变量。
(4)在命令窗口中,有许多功能键的使用方法,这里不祥述,具体内容参见教材。
2.熟悉命令窗口的参数设置(1)matlab的命令窗口的参数设置如图1所示。
Text display(文本显示),其中Numericformat(数据格式),Numeric display(数据显示方式)可以在loose和compact之间选择,选择loose,命令窗口中的命令和结果都隔行显示,而选择compact则以紧凑方式显示。
(2)display(显示参数),其中Echo on 控制M文件的运行中M文件的内部命令是否在命令窗口中显示:Wrap line(自动换行)选择该项,输入输出行根据命令窗口的宽度自动换行,否则,无论输入输出行的长度是多少都显示在第一行宽度不够时出现滚动条。
(3)在树状展开结构Command window项,可以设置Fonts&Colors(字体和颜色),如图2所示。
图1 命令窗口设置窗口图2 命令窗口-字体和颜色设置窗口3.熟悉和掌握命令历史窗口的功能;Command History(命令历史)窗口显示已执行过的命令。
4.熟悉当前路径窗口和MATLAB的收索路径的作用。
四、实验要求:1.在MATLAB命令窗口键入5*cos(2*pi/8)/sin(pi/9)+2,按回车键,运行其结果。
板球系统实验指导书(MATLAB)

板球系统实验指导书(MATLAB)深圳元创兴科技有限公司实验指令瑞诺沃自动控制类采用板球系统的定位控制和轨迹跟踪真实测试手指引导第一部分深圳元创兴科技有限公司....................................................................................1第二章系统控制原理介绍..........................................................................................2第3章实验 (3)实验1运动控制基础实验...............................................................................................3实验2板球系统水平调整实验..........................................................................................8实验3板球系统建模、仿真和实验....................................................................................10实验四态空间极点配置控制实验.............................................................................19实验5线性二次型最优控制LQR控制实验.......................................................................33实验6模糊控制实验....................................................................................................40实验7变论域模糊控制实验.. (47)深圳元创兴科技有限公司实验指令第一章实验仪器及其连接电脑硬件要求:1、奔腾二、奔腾三、AMD速龙以上;2、内存至少256MB,推荐超过256 MB;3.至少有两个通用串行总线接口;4.支持RS-232串行通信软件要求:1、微软视窗98、微软视窗2000、微软视窗XP;;2、Visual c++ 6.0;3、Matlab 6.5板球测试系统的总体结构如图1.1所示。
MATLAB实验指导书(第一次实验)
************************ MATLAB上机指导书************************昆明理工大学机电学院刘孝保2013年3月实验一 MATLAB 工作环境熟悉及简单命令的执行一、实验目的:熟悉MATLAB 的工作环境,学会使用MATLAB 进行一些简单的运算。
二、实验内容:MATLAB 的启动和退出,熟悉MATLAB 的桌面(Desktop ),包括菜单(Menu )、工具条 (Toolbar )、命令窗口(Command Window)、历史命令窗口、工作空间(Workspace)等;完成一些基本的矩阵操作;学习使用在线帮助系统。
三、实验步骤:1、启动MATLAB ,熟悉MATLAB 的桌面。
2、在命令窗口执行命令完成以下运算,观察workspace 的变化,记录运算结果。
(1)(365-52⨯2-70)÷3 (2)>>area=pi*2.5^2(3)已知x=3,y=4,在MATLAB 中求z :()232y x y x z -= (4)将下面的矩阵赋值给变量m1,在workspace 中察看m1在内存中占用的字节数。
m1=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡11514412679810115133216 执行以下命令 >>m1( 2 , 3 ) >>m1( 11 ) >>m1( : , 3 )>>m1( 2 : 3 , 1 : 3 )>>m1( 1 ,4 ) + m1( 2 ,3 ) + m1( 3 ,2 ) + m1( 4 ,1) (5)执行命令>>help abs查看函数abs 的用法及用途,计算abs( 3 + 4i ) (6)执行命令>>x=0:0.1:6*pi; >>y=5*sin(x); >>plot(x,y)(6)运行MATLAB 的演示程序,>>demo ,以便对MATLAB 有一个总体了解。
板球系统实验指导书(MATLAB)
图 1.1 板球实验系统总体结构图 本实验系统的主体包括板球、伺服驱动器、数据采集卡、直流伺服电机等。主体、 驱动器、直流伺服电机、电源和数据采集卡都置于实验箱内,实验箱通过两条 USB 数据 线与上位机进行数据交换,另有一条线接 220V 交流电源。
360o n
n —编码器线数。 由于光电式脉冲编码盘每转过一个分辨角就发出一个脉冲信号,因此,根据脉冲数 目可得出工作轴的回转角度,由传动比换算出直线位移距离;根据脉冲频率可得工作轴 的转速;根据 A 、 B 两相信号的相位先后,可判断光电码盘的正、反转,以得到待测装 置转向。 由于光电编码器输出的检测信号是数字信号,因此可以直接进入计算机进行处理,
电阻触摸屏的主要部分是一块与显示器表面非常配合的电阻薄膜屏,在强化玻璃表
面分别涂上两层 OTI 透明氧化金属导电层。利用压力感应进行控制。当手指触摸屏幕时, 两层导电层在触摸点位置就有了接触,电阻发生变化。在 X 和 Y 两个方向上产生信号, 然后传送到触摸屏控制器。控制器侦测到这一接触并计算出(X,Y)的位置,再根据模拟 鼠标的方式运作。电阻屏根据引出线数多少,分为四线、五线等多线电阻触摸屏。
(要修改
5
深圳市元创兴科技有限公司
实验指导书
1、触摸屏实验 双击 Select Experiment 模块,选择试验编号 1,然后双击右侧的“实验 1 运动控 制基础实验”子模块,打开如下界面
实验一 运动控制基础实验.................................................................................................................... 3 实验二 板球系统调平板水平实验........................................................................................................ 8 实验三 板球系统建模、仿真及实验.................................................................................................. 10 实验四 状态空间极点配置控制实验.................................................................................................. 19 实验五 线性二次最优控制 LQR 控制实验..........................................................................................33 实验六 模糊控制实验.......................................................................................................................... 40 实验七 变论域模糊控制实验.............................................................................................................. 47
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 3.1 光电式编码器原理示意图 增量式光电编码器直接利用光电转换原理输出三组方波脉冲 A 、B 和 Z 相;A 、B 两 组脉冲相位差 2 ,将输出信号送入鉴向电路,从而可方便地判断出旋转方向,而 Z 相为 每转一个脉冲,用于基准点定位。 光电式增量编码器的测量精度取决于它所能分辨的最小角度 (分辨角、分辨率), 而这与码盘圆周内所分狭缝的线数有关。
三 编码器和触摸屏的使用实验 本实验对象为板球系统上的电机尾部编码器和平板上的触摸屏,在充分理解以上实
验原理的基础上进行下列实验。 把两条 USB 数据线与计算机连接(RUN 指示灯亮表示数据采集卡已连接),将电源插
头插入插座(此时实验箱电源开关应是断开的),连接完毕后,打开实验箱电源(SON 指
示灯亮表示电源接通)。双击打开快捷方式“元创兴板球系统实物控制” 图),会看到以下界面
五线电阻触摸屏的另一个专有技术是通过精密的电阻网络来校正A面的线性问题:由 于工艺工程不可避免的有可能厚薄不均而造成电压场不均匀分布,精密电阻网络在工作 时流过绝大部分电流,因此可以补偿工作面有可能的线性失真。
五线电阻触摸屏是目前最好的电阻技术触摸屏,最适合于军事、医疗、工业控制领 域使用。
图 3.2 五线电阻式触摸屏结构 Fig.3.2 Structure chart of five line resistive touch screen
深圳市元创兴科技有限公司
第一章 实验使用仪器及其连接方式
实验指导书
一 PC 机 硬件要求: 1、Pentium II、Pentium III、AMD Athlon 或者更高; 2、内存至少 256MB,推荐 256MB 以上; 3、至少有两个 USB 接口; 4、支持 RS-232 串口通信。 软件要求: 1、Microsoft Windows 98、Microsoft Windows 2000、Microsoft Windows XP; 2、Visual C++ 6.0; 3、Matlab 6.5。
好 <10ms
好 较小 没有 没有 纯平 好 好 室内或室外
五线电阻屏 中 一般 高 好
内置或外挂 任何物体 4096×4096
好 <15ms
好 较小 没有 没有 纯平 好 好 室内或室外
声波屏 中 好 较高 很好
内置或外挂 手指、软胶 4096×4096
好 <10ms 一般 很大 较大 较小 纯平 一般 一般 室内或室外
表 3.1 各种触摸屏的优缺点对照表
Tab.3.1 The Contrast table of Touch screens
性能
名称
价格
防爆性
稳定性
透明度
安装形式
触摸物
输出分辨率
抗强光干扰性
响应速度
跟踪速度
传感器损伤影响
污物影响
漂移
适用显示器
防水性
防电磁干扰
适用范围
四线电阻屏 低 一般 高 好
内置或外挂 任何物体 4096×4096
二 试验系统 板球系统实验总体结构如图 1.1 所示
图 1.1 板球实验系统总体结构图 本实验系统的主体包括板球、伺服驱动器、数据采集卡、直流伺服电机等。主体、 驱动器、直流伺服电机、电源和数据采集卡都置于实验箱内,实验箱通过两条 USB 数据 线与上位机进行数据交换,另有一条线接 220V 交流电源。
1
深圳市元创兴科技有限公司
第二章 系统控制原理简介
实验指导书
本实验系统以自动控制中的现代控制理论和模糊控制为理论基础。 板球系统的实验原理是:小球位置采集卡采集到触摸屏上小球位置数据,电机数据 采集卡采集到两个电机尾部编码器数据,电机与平板通过连杆连接,所以通过计算就可 以得到平板的倾斜角位移以及小球的位移,角位移差分得角速度,位移差分可得速度, 然后根据自动控制中的各种理论转化的算法计算出控制量。控制量由计算机通过 USB 数 据线下发给伺服驱动器,由驱动器实现对电机控制,电机尾部编码器连接到驱动器形成 闭环,从而可以实现平板上小球的定位以及轨迹跟踪。 其工作原理如图 2.1 所示
3
深圳市元创兴科技有限公司
实验指导书
不需放大和转换等过程,使用非常方便,因此应用越来越广泛。 二 触摸屏
所谓触摸屏,从市场概念来讲,就是一种人人都会使用的计算机输入设备,或者说 是人人都会使用的与计算机沟通的设备。它的本质是传感器,它由触摸检测部件和触摸 屏控制器组成,主要用于检测对象触摸位置,接受后送触摸屏控制器。从技术原理角度 来讲,触摸屏大体有三个特征:其一它必须保证是透明的,因此它必须通过材料科技来 解决透明问题,像数字化仪、写字板、电梯开关,它们都不是触摸屏;其次它是绝对坐 标,手指摸哪就是哪,不需要第二个动作,不像鼠标,是相对定位的一套系统,第三就 是能检测手指的触摸动作并且判断手指位置,各类触摸屏技术就是围绕“检测手指触摸” 而八仙过海各显神通的。目前,根据传感器的类型,触摸屏大致被分为红外线式、电阻 式、表面声波式和电容式触摸屏四种。
4
深圳市元创兴科技有限公司
实验指导书
五线电阻技术触摸屏的基层把两个方向的电压场通过精密电阻网络都加在玻璃的导 电工作面上,我们可以简单的理解为两个方向的电压场分时工作加在同一工作面上,而 外层镍金导电层只用来当作纯导体,有触摸后分时检测内层ITO接触点X轴和Y轴电压值的 方法测得触摸点的位置。五线电阻触摸屏内层ITO需四条引线,外层只作导体仅仅一条, 触摸屏得引出线共有5条。首先五线电阻触摸屏的A面是导电玻璃而不是导电涂覆层,导 电玻璃的工艺使得A面的寿命得到极大的提高,并且可以提高透光率。其次五线电阻触摸 屏把工作面的任务都交给寿命长的A面,而B面作为导体,并且采用了延展性好、电阻率 低的镍金透明导电层,因此,B面的寿命也极大的提高。
深圳市元创兴科技有限公司
Reinovo
实验指导书
自动控制类使用
板球系统的定位控制和轨迹跟踪
实验指导书
0年12月22日
深圳市元创兴科技有限公司
实验指导书
第一章 实验使用仪器及其连接方式..................................................................................... 1 第二章 系统控制原理简介..................................................................................................... 2 第三章 实验............................................................................................................................. 3
电阻触摸屏的主要部分是一块与显示器表面非常配合的电阻薄膜屏,在强化玻璃表
面分别涂上两层 OTI 透明氧化金属导电层。利用压力感应进行控制。当手指触摸屏幕时, 两层导电层在触摸点位置就有了接触,电阻发生变化。在 X 和 Y 两个方向上产生信号, 然后传送到触摸屏控制器。控制器侦测到这一接触并计算出(X,Y)的位置,再根据模拟 鼠标的方式运作。电阻屏根据引出线数多少,分为四线、五线等多线电阻触摸屏。
(要修改
5
深圳市元创兴科技有限公司
实验指导书
1、触摸屏实验 双击 Select Experiment 模块,选择试验编号 1,然后双击右侧的“实验 1 运动控 制基础实验”子模块,打开如下界面
360o n
n —编码器线数。 由于光电式脉冲编码盘每转过一个分辨角就发出一个脉冲信号,因此,根据脉冲数 目可得出工作轴的回转角度,由传动比换算出直线位移距离;根据脉冲频率可得工作轴 的转速;根据 A 、 B 两相信号的相位先后,可判断光电码盘的正、反转,以得到待测装 置转向。 由于光电编码器输出的检测信号是数字信号,因此可以直接进入计算机进行处理,
实验一 运动控制基础实验.................................................................................................................... 3 实验二 板球系统调平板水平实验........................................................................................................ 8 实验三 板球系统建模、仿真及实验.................................................................................................. 10 实验四 状态空间极点配置控制实验.................................................................................................. 19 实验五 线性二次最优控制 LQR 控制实验..........................................................................................33 实验六 模糊控制实验.......................................................................................................................... 40 实验七 变论域模糊控制实验.............................................................................................................. 47