观测系统定义
综合气象观测系统介绍

综合气象观测系统是为满足气象防灾减灾和应
对气候变化的需求,综合地基、空基、天基观测手
段,全面获取气象及其相关信息的系统。 (《综合
气象观测系统发展指导意见》,2009年4月)
传感器所处位置
按承担的任务和作用
中层大气 地表
综合气象观测系统的概念
综合气象观测系统的概念
气象观测的基础地位
观测是气象现代化的基础,也是 整个气象业务的基础,没有观测,谈 不上预报,更谈不上服务。
➢ ······
——郑国光在首届全国气象观测技术经验交流会上的讲话
地面气象观测自动化水平稳步提升
49094
88.6%
气溶胶质量浓度观测业务已经覆盖全国所有 省会和副省级城市,开展了74个重点城市的 气溶胶质量浓度观测系统建设。
高空气象观测系统升级换代步上新台阶
831个GNSS/MET
新增24部,39部风廓线雷达
➢若能获取立体气象信息,才使得我们能开展有科学
基础的气象预报。
11
气象观测的基础地位(业务发展)
➢ 气象观测能力决定着气象预报和服务水平:开展天气预报 预警、气候预测预估、气象服务、气象科学研究的基础, 是推动气象科学发展的原动力。——科学决策的基础 ➢气象科研业务的基础能力决定于人们对大气状况及其 演变规律的把握程度,即人们对气象信息的获取和认 识水平,其首要问题是我们的科技水平能否使我们观 测到必需获取的气象信息。所以说气象观测系统建设 从根本上决定着气象科学和事业的发展水平,决定着 最终的气象预报能力和气象服务水平。
现代气象观测发展来说,首先要讲综合集 成和系统集约,要讲科学应用。
综合观测不仅是观测方式上要综合统筹布 局,运行管理上更要统筹集约,并与整体业 务协调融合。
地震勘探野外观测系统共5页word资料
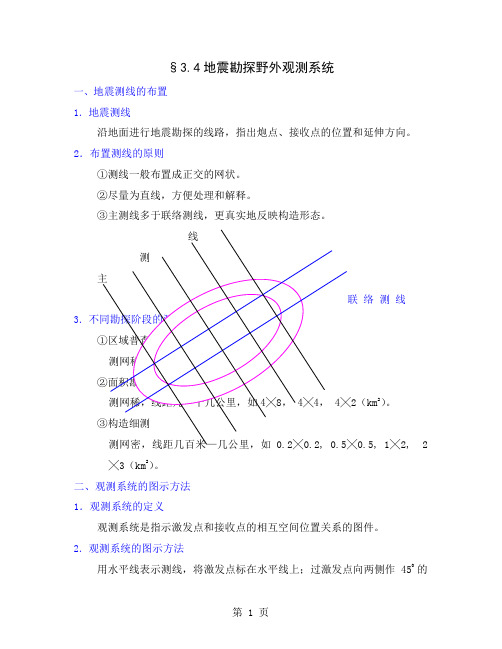
§3.4地震勘探野外观测系统一、地震测线的布置1.地震测线沿地面进行地震勘探的线路,指出炮点、接收点的位置和延伸方向。
2.布置测线的原则①测线一般布置成正交的网状。
②尽量为直线,方便处理和解释。
③主测线多于联络测线,更真实地反映构造形态。
络测线3.2(km2)。
0.5, 1╳2, 2╳3(km2)。
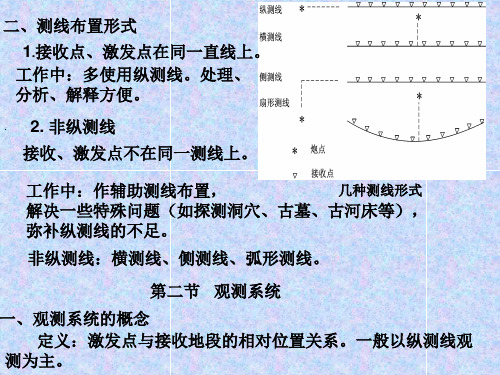
二、观测系统的图示方法1.观测系统的定义观测系统是指示激发点和接收点的相互空间位置关系的图件。
2.观测系统的图示方法用水平线表示测线,将激发点标在水平线上;过激发点向两侧作450的斜线;将接收点投影到过其激发点的450斜线上。
共炮点线共接收点线共反射点线共炮检距线斜线斜线垂线(覆盖次数) 水平线12345678910测线三、反射波法观测系统的基本类型1.简单连续观测系统例子:单边激发,单边接收,一次覆盖,偏移距为O。
12345测线P90图6.3-29b2.间隔连续观测系统例子:单边激发,单边接收,一次覆盖,偏移距不为0。
1234 5 测线P90图6.3-29d3.多次覆盖观测系统(1)定义地下界面被观测的次数多于一次,例如二次覆盖,三次覆盖,……。
(2)多次覆盖原理示意图M不经济,效率低。
(3)抽共反射点道集实现多次覆盖例如:单边激发,仪器有24道,每激发一次,炮点和排列一起向前移动2个道间距,即可形成6次覆盖。
O 1 O 2 O 3 O 4 O 5 1 O 6 O 7 O 8 O 9 O 10 O 11 O 12 O 131 3 5 7 9 11 13 15 17 19 21 23 24 P91图6.3-23抽共反射点道集——生产中放一炮多道接收,并按一定的规律布置排列,等室内处理时,将能收到同一个点的反射波的道从不同的炮中抽出来,按炮检距大小排列起来,叫做抽共反射点道集。
(4)6次覆盖,24道接收的共反射点道集表P92表6.3—1nNSx d 2=∆=υ P90、P91的N 与n 互换 。
北京大兴国际机场自动气象观测系统简介与故障解决办法
2022年 4月 April 2022Digital Technology &Application 第40卷 第4期Vol.40 No.4数字技术与应用68中图分类号:V321.21 文献标识码:A 文章编号:1007-9416(2022)04-0068-03DOI:10.19695/12-1369.2022.04.23北京大兴国际机场自动气象观测系统简介与故障解决办法中国民用航空华北地区空中交通管理局 刘绍国自动气象观测系统(即AWOS)是民航空管气象设备的重要组成部分,保障自动气象观测系统运行正常对飞行安全有着重要的意义,因此自动气象观测系统的维护与故障排除工作特别重要。
本文介绍北京大兴国际机场自动气象观测系统组成及工作原理、并结合实例讲述故障排除和解决方法。
1 大兴机场自动气象观测系统概述大兴机场的自动气象观测系统使用的型号是Vaisala AviMet。
Vaisala AviMet自动气象观测系统是专为管制员、气象预报员、气象观测员和机场其他用户的需求而设计。
此系统测量、计算、显示、储存并发布大兴机场的气象信息。
它包含飞机跑道设置的传感器、中央数据处理计算机(CDU)、通讯系统以及多个工作站。
大兴机场自动气象观测系统包含2个CDU,分别为CDUA和CDUB。
它负责处理数据并将数据以不同的显示内容发送给有不同需求的用户。
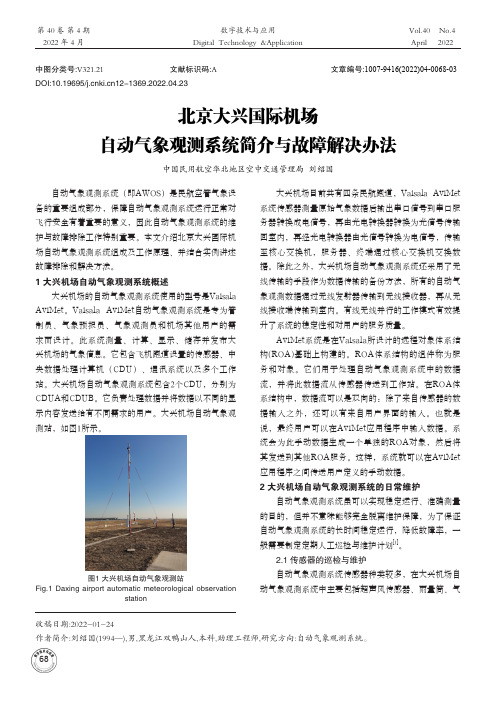
大兴机场自动气象观测站,如图1所示。
收稿日期:2022-01-24作者简介:刘绍国(1994—),男,黑龙江双鸭山人,本科,助理工程师,研究方向:自动气象观测系统。
图1 大兴机场自动气象观测站Fig.1 Daxing airport automatic meteorological observationstation大兴机场目前共有四条民航跑道,Vaisala AviMet 系统传感器测量原始气象数据后输出串口信号到串口服务器转换成电信号,再由光电转换器转换为光信号传输回室内,再经光电转换器由光信号转换为电信号,传输至核心交换机,服务器、终端通过核心交换机交换数据。
几种常见的三维地震观测系统分析
低, 排列长度较长 , 适宜于 目的层埋藏较浅区域施工 , 横 向覆盖次 数较 高 , 道 数要 求 较 低 , 位 面 积物 理 点较 对 单
譬就 能取得 相近 的效 果 , 下文就 3种不 同的横 向观测 系 统 做一 个简 单 的分 析 比较 。
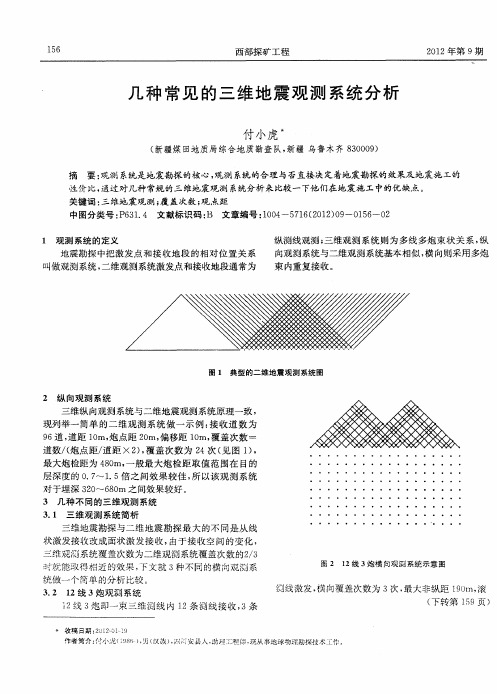
32 l . 2线 3炮观测 系统
图2 1 2线 3炮 横 向观 测 系统 示 意 图
测线激 发 , 向覆 盖次 数为 3次 , 横 最大 非纵距 1 0 滚 9 m,
1 2线 3 即一 束 三维 测 线 内 】 测线 接 收 , 炮 2条 3条
最 大炮 检距 为 40 一 般最 大 炮 检距 取 值 范 围 在 目的 8m, 层 深 度的 0 7 . 倍 之 间效果 较 佳 , 以该 观 测 系统 . ~1 5 所
对 于埋 深 3 0 8 m 之 间效果较好 。 2  ̄6 0 3 几种不 同 的三维观 测 系统 3 I 三维 观测 系统简 析 . 三维 地震 勘探 与二 维 地震 勘 探 最 大 的不 同是 从线 状激 发接 收改成 面状 激 发 接 收 , 由于接 收空 间 的 变化 , 三 维观 测 系统覆 盖 次数为 二维 观测 系统 覆 盖次数 的2 3 /
地震 勘探 中把 激发 点 和 接 收地 段 的相 对位 置 关 系 叫做观 测系统 , 二维 观测 系统 激发点 和接 收地 段通 常为
向观 测 系统 与 二维观 测 系统基本 相似 , 向则 采用 多炮 横
束 内重 复接收 。
图 1 典 型 的 二 维 地 震 观 测 系统 图
2 纵 向观测 系统
要 的。
E3 支风歧 , 国, 河南省洛 宁县 蒿坪 沟银铅 多金属矿普 3 任永 等. 查地质报告[ . 9 8 R] 19 .
地震勘探技术野外工作方法反射波法折射波法
(3) 干扰波少,强度弱,并易于分辨。图5.9 大地衰减和检波器特性曲线
2.检波器的频率特性 高频检波器:高频响应好, 低频响应差。如图5.9所示。
① 大地滤波衰减曲线; ② 检波器频率响应曲线; ③ 检波器+大地特性。高、低频信号的输出基本均一。
1.单边观测系统 定义:在炮点一方接收的观测系统。适应折射界面较浅的情况。 折射波法规测系统
2.相遇观测系统
定义:两个单边时距曲线组成的 观测系统。时距曲线存在互换关系。 在讨论倾斜界面折射波时距曲线时已 提及过。
3.追逐观测系统 主要作用:界面弯曲,判断波有无 穿透;断层,判断是否绕射。在前面已地震波的激发
1.地震勘探对激发条件的基本要求
激发条件:影响地震记录好坏的第一因素,得到好的有效波的 基础条件。
(1) 有一定能量,保证获得勘探目的层的反射; (2) 有效波能量强,干扰波相对微弱,有较高的信噪比; (3) 频带较宽,尽可能接近δ脉冲(尖脉冲),以利提高分辩率; (4) 同点激发,地震记录重复性好。 2.震源类型
把激发点和排列向一个方向移动,重复以上工作,得一连续长反射 界面。图中,T=Tˊ(互换时间)。
观测系统图示
2. 如图(b)示。 O1激发,O1O2接收,用O1A表示,O1A在测线上投影O1A1对应 反射界面R1R2;
O2激发,O1O2接收,用O2A表示,相应反射界面为R2R3。 两次激发,得连续反射界面段R1R3。 折射法:多用时距平面图表示。
(2)相干干扰
定义:指外界产生的具有一定规律性的干扰。
特点:在地震记录上表现为有规律的振动,具有一定的 频率和视速度。
相干干扰产生:在 大型厂矿附近,机器有 规律地连续振动,江、 河波浪冲击岸坡等。如 图5.13所示。
自动气象观测系统

主要内容
概述 结构及工作原理 硬件 软件 采集与算法 自动气象站网
§1 自 动 气 象 站 ——概 述
自动气象观测系统,从狭义上说是指自动 气象站,从广义上说是指自动气象站网。
自动气象站是一种能自动地观测和存储气 象观测数据的设备。如果需要,可直接或 在中心站编发气象报告,也可以按业务需 求编制各类气象报表。
当太阳直辐射量超过120W/㎡时,直接辐射表和日照 时数记录仪连接,也可直接测量日照时数。
风向、风速 温、湿度
气压 雨量 地温 蒸发 辐射
传感感雨器
自动气象站的结构框图
采集系统
采集核心
防雷板
通讯预处理
MODEM 串口隔离器 DCP发射机 VHF/UHF
通讯部件
UPS 主控机 打印机
供电系统
2分钟平均风向 2分钟平均风速 10分钟平均风向 10分钟平均风速
气压传感器
原理
振筒式气压计由振动筒、外保 护筒、激振线圈和检测线圈组成。
弹性振筒感应内外的真空腔和 空气腔的压力差对应输出变化的频 率。系统将频率转化为电压输出。
为解决振筒振动固有频率的温 度漂移,在振筒基座上加了一个测 温元件,将测得筒内气体温度作为 参数提供给系统进行温度补偿。
蒸发传感器
超声波测距原理,选用高精度 超声波探头,对标准蒸发皿内水面 高度变化进行检测,转换成电信号 输出 。
照时数记录仪连接,也可直接 测量日照时数。
收率的黑色涂层。在线性范围
内产生的温差电势与太阳直接
辐照度成正比。
• 自动跟踪装置是由底板、纬度 架、电机等组成。电机是动力 源,用户可根据要求选择直流 电机或交流电机作为动力源。
• 该表的跟踪精度与安装和细心 的调整有密切关系,有关详细 说明请参考产品说明书。
地震资料处理流程与方法介绍(2)

动校正前
动校正后
3、水平叠加
九、动校正、切除与叠加
叠加
同一反射点地震记录
叠加剖面
十、 (短波长)剩余静校正
1、为什么要做剩余静校正
由于低速带的速度和厚度在横向上的变化,使野外表层参数测量不准确或无法测 量,故使野外静校正后,爆炸点和接收点的静校正量还残存着或正或负的误差,这个 误差称为“剩余静校正量”。
幅能量分布均匀合理 。 基本假设:近地表不均匀因素对地震记录影响十分复杂,把各种因素同时加以考
虑会使问题变得十分棘手,甚至无法解决。为了使问题简化并满足地表一致性要求, 一般作如下假设:
(1)地表振幅影响因子对整道是一个常数,它是震源强度、表层衰减、检波器 耦合等影响的总和系数。
(2)各振幅因子保持地表一致性原则。即不管波的传播路径如何,同一道集内 所有道将具有同一补偿因子。如:同一炮的所有道将具有同一炮点的补偿因子,同一 检波点所有道将具有同一检波点的补偿因子。
将野外磁带数据转换成处理系统格式,加载到磁盘上; 2、输入数据质量检查: 炮号、道号、波形、道长、采样间隔等等。
二、置道头
道头:每个地震道的开始部分都有一个固定字节长度的空余段,这个空余段用来记录
描述本道各种属性的信息,称之为道头。如第8炮第2道,第126CMP等。
1、观测系统定义
模拟野外,定义一个相对坐标系,将野外的激发点、接收点的实际位置放到这个相 对的坐标系中。 2、置道头
(3)输入数据为经准确的静校正、球面扩散、地层衰减补偿后的记录。 ——可以根据数据的具体情况,在处理的不同阶段多次使用。目前的流程大都使用一 次。
2、地表一致性振幅补偿
五、振幅补偿
自动气象观测系统简介
云高仪维护
周期性维护主要是窗口的清洁。 唯一的机械运动部件-----窗口调
节空气鼓风机的正常功能也需要 检查。
前向散射能见度仪
前向散射能见度仪 FD12
前向散射能见度仪FS11
前向散射能见度仪 FD12安装
距跑道中心线120米跑道中间处。 传感器测量高度离跑道面2.5米。
散射测量
modem
风显示器
室内
RS485
前散射传感器
跑道灯光
大气透射仪和背景亮度计 中央风站
气象站
-- 风向风速 - 温度湿度 - 压力 - 雨量计
室外
云高仪
场地站过来的Modem线缆
云高仪
1_CLOUD_SENSOR
跑道传感器配置图
2_CLOUD_SENSOR
QFE: PRESSURE_xA
QFE: PRESSURE_xB
能自动观测和传递气压、气温、相对湿度(或露点)、风 向、风速和雨量等常规气象要素信息的观测装置。
自动气象观测系统型号
AviMeT AWOS (南宁、郑州、长沙。。。) MIDAS IV AWOS(广州、深圳。。。) AWOS2000 AWOS(海口。。。) MIDAS600 AWOS()
自动气象观测系统厂家
RWY dir: Smaller (Right)
4_RVV_SENSOR
4_WIND_SENSOR 4_TU_SENSOR 4_PRESSURE_SENSOR
5_RVV_SENSOR
5_WIND_SENSOR 5_TU_SENSOR 5_PRESSURE_SENSOR
3_RVV_SENSOR
3_WIND_SENSOR 3_TU_SENSOR 3_PRESSURE_SENSOR
系统的能观测性

e1t
y(t
)
C
P
_
x
_
C
_
x
_
Cet
_
x(0)
_
C
e2t
_
x(0)
e
nt
Friday, May 22, 2020
10
f11 f12 f1n
_
令:C mn
n
f
m1
fm2
f
mn
f11
则:
y m1
f 21
Friday, May 22, 2020
1
②能观测性定义:
线性定常连续系统的动态方程为:xy
Ax Cx
Bu
在时给间定t 控t0制之输内入,根u(据t)作从用t0下到,t系对统于输任出意y初的始测时量刻值t,0,唯若一能地在确有定限系 统在t0时刻的状态 x(t0 ),则称该系统是能观测的。只要有一个状
7
x1
(t
)
e
2t
x1
(0)
t e2(t )u( )d
0
x2 (t) (et e2t )x1(0) et x2 (0)
t e2(t )u( )d
0
从上式可以看出:u(t)对x1(t), x2 (t)作用的强度是一样的,符号
相反。当 x1(0) x2 (0) 0 时(能控性与初值无关),
§7.4 系统的能观测性
一、能观测性定义:
①直观概念:系统的能观测性指系统输出为y(t) 时对状态 x(t)的
反映能力。
[例7-4-1]系统结构图如下:
u
x1
s 1
x1
x2
1观测系统及主要参数的选择
1 观测系统及主要参数的选择三维地震勘探是一种高密度面积采集技术,是三维体积勘探。
它利用炮点和检波点网格的灵活组合获得分布均匀的地下CDP点网格和确定的覆盖次数。
观测系统是指检波器排列和爆炸点相对位置的关系,要求是不仅在单张记录上可靠追踪有效波,且要保证在所得资料上连续追踪地震界面。
观测系统正确与否直接影响数据采集质量、资料处理和地质成果的精度。
三维观测系统的形式基本可分为两大类,即规则观测系统和不规则观测系统。
规则观测系统用于地面施工条件好的地区,不规则观测系统用于地面障碍较多的地区。
在目前三维地震勘探中,线束型观测系统是经常被选用的一种规则观测系统。
其优点是可以获得从小到大均匀的炮检距分布和均匀的覆盖次数,适用于复杂地质条件地区。
此外,当遇到障碍物时可通过改变纵横向偏移距和激发方向等灵活的变观手段,获得障碍物下地震资料。
1.1 空间采样间隔的确定空间采样是指分布在地面上离散的检波点采集的地震讯号,空间采样间隔包括道距和束线中的接收线距。
根据采样定理,道距ΔX应为:ΔX≤■×■(1)若某区应保护煤层反射波主频为50 Hz,视速度V取2 300 m/s,则:ΔX≤■×■=23 m那么该区可以采用20 m的接收道距。
接收线距一般大于道距的1~4倍。
一般为40 m。
1.2 网格的确定三维地震勘探与二维地震勘探的迭加形式是不同的,二维是共反射点迭加,三维则是共反射面元迭加。
共反射面元迭加是指共反射面元道集内各反射点信号的迭加。
反射面元的大小在纵向上一般取小于接收点距之半为共反射面元的线性长度即Dx≤ΔX/2,一般为10 m,横向宽度Dy≥Dx,一般也选为10 m。
根据上述选择CDP点网格为:Dy×Dx=10 m×10 m。
这样小的CDP点网格对探测细微构造和小幅度起伏是极为有利的。
1.3 炮线间距的确定炮线间距即为炮点线向前滚动的距离。
在规则观测系统中,炮点线呈线状规则排列,并垂直于观测束线。
地震资料数字处理

MB1 MB2 MB3
四、处理流程
(1) 观测系统定义 (2) 野外静校正 (3) 线性动校正 (4) 叠前去噪 (5) 反褶积 (6) 速度分析 (7) 动校正、切除 (8) 剩余静校正 (9) 叠加 (10)叠后去噪 (11)绘图
1、定义观测系统 运行如下模块: 3D Land Geometry Spreadsheet* 弹出如下菜单:
横线方向覆盖次数: N y P * R /(2d )
P 排列不动所需的激发点数;R 接收线数; d 束线间接收线移动距离相当的激发点数。
例 如 : 对 于8线8炮 制 的 采 集 方 式 , 其R和P分 别 为8; 束线间接收距为4 200m 800m,横线炮距100m, d 800/100 8, 故 N y 8 8 /(2* 8) 4
10。用MB1击,则 将数据输入表中。
● Sources (填写炮点参数表)
Source Line Station St Index x y z FFID Time Date Offset Skid Shot fold* Pat Shift Static
用户定义的震源编号 震源线号 震源站号 同一炮点识别器(1~9) 震源点的X坐标 震源点的Y坐标 震源点的高程 野外文件号 放炮时间 放炮日期 炮点垂直炮线的偏移距,+右、-左 炮点平行炮线的偏移距,+大、-小号 接收道数 排列滚动的站点值 用户定义的静校量
● Receivers (填写接收点参数表)
Station Pt index x y Elev Line Static
接收点站号(桩号) 站点识别器(1~9) 接收点x坐标 接收点y坐标 接收点高程 接收点线号 接收点静校量
本例为498~825/线 全1 为测量数据 为测量数据 为测量数据 本例线号为1~9 全0
地震勘探原理__各章要点总结
第一章 地震勘探的理论基础1、各向同性介质:弹性与空间方向无明确关系的介质称各向同性介质,否则是各向异性介质。
2、泊松比σ:弹性体受力纵向伸长(缩短)与横向收缩(膨胀)的比值。
L L d d //∆∆=σ3、对于大多数沉积岩石,σ=0.25,∴V P =1.73V S 。
4、瑞雷面波(R 波)特点:(1) 波的能量分布在地表附近的介质中并随深度迅速衰减。
(2) 质点振动方向分上、下、坐、右,合成的振幅轨迹是椭圆(逆时针方向),长轴垂直地面,长短轴比值是2/3。
(3) 当σ=0.25时,V R = 0.92V S =0.54V P ,速度低、频率低(10~30Hz),波形宽。
(4) 有频散(波散)现象,不同频率的成分传播速度(相速度)不同,即群速度不等于相速度。
5、拉夫面波(L 波) 特点:能量沿地震界面分布,振动方向与传播方向垂直,振动平面平行界面,即为SH 波,由于水平振动,检波器接收不到。
6、地震波的特征:运动学特征——研究波在地层中传播的空间位置与传播时间的关系。
动力学特征——研究波在地层中传播的能量(振幅)变化和波形特征(频谱)。
7、惠更斯原理(1690)也叫波前原理,说明波向前传播的规律。
在弹性介质中,任意时刻波前面上的每一点,都可看作是一个新的波源(子波)而产生二次扰动,新波前的位置可认为是该时刻各子波波前的包络。
惠更斯原理只给出了波传播的空间位置,而不能给出波传播的物理状态。
菲涅尔(1814)对惠更斯原理进行了补充:波在传播时,任意点处的振动,相当于上一时刻波前面上全部新震源产生的子波在该点处相互干涉的合成波。
8、视速度定理地震波的传播是沿射线方向进行的,而观测地震波是沿测线方向进行的,其方向和射线方向不一致。
波前沿测线传播的速度不是真速度V ,而是视速度*V 。
αsin //=∆∆=∆∆∆∆=*xs t x t s V V βαcos sin V V V ==* 式中 α——射线与地面法线的夹角,称入射角;β——波前与地面法线的夹角,称出射角。
地震数据处理方法

地震数据处理方法预处理预处理主要包括数据解编、格式转换、道编缉、观测系统定义等工作。
一、数据解编目前野外地震数据有两类基本的格式,一类是按照采样时间顺序排列的多路传输记录,称为时序记录;另一类是以地震道为顺序排列的民录,称为道序记录。
解编就是按照野外采集的记录格式将地震数据检测出来,并将时序的野外数据转换为道序数据,然后按照炮和道的顺序将地震记录存放起来。
每一个地震道由道头和数据两部份组成,道头用来存放描述地震道特征的数据,如野外文件号(FFID)记录道号(Channel Number)、CMP号、炮检距(offset)、炮点高程和检波点高程等。
道头是地震数据处理中十分重要的信息,不正确的道头信息会使得某些处理模块产生错误的处理结果。
二、道编辑道编辑是对由于激发、接改或噪声因素产生的不正常的地震道进行处理。
对由于检波器工作不正常造成的瞬变噪声道和单频信号道等进行剔除,对记录极性反转的地震道进行改正对地震记录中的强突发噪声和强振幅野值进行压制等。
道编辑是地震数据噪声压制中的重要环节。
三、野外观测系统定义地震数据处理中的许多工作是基于地震道的炮点坐标、检波点坐,以及根据这些坐标所定义的处理网格进行的。
野外地震数据的道头中记录了每一个地震道的野外文件号(FFID)和道号(Channel Number),炮点和检波点的坐标信息记录在野外班报中。
观测系统定义就是以野外文件和号和记录道号为索引,赋予每一个地震道正确的炮点坐标、检波点坐标,以及由此计算的中心点坐标和面元序号,并将这些数据记录在地震道头上或观测系统数据库中。
观测系统定义一般由炮点定义、检波点定义和炮点与检波点关系模版定义三部分构成。
观测系统定义是地震数据处理中得要的基础工作。
不同的处理系统,观测系统定义方式不同,总体而言比较繁琐,特别是当野外采集条件复杂,观测系统变化较大,偏离设计位置的炮点、检波点数目较多时,很容易产生错误,因此需要有相应的质量控制手段对观测系统进行检查。
地震数据处理基本流程

地震数据处理基本流程
地震数据处理基本流程:
①数据输入:将原始地震数据导入处理系统,这通常涉及到数据的读取、格式转换和初始检查。
②观测系统定义:设定地震数据的观测参数,包括炮点和检波器的位置、深度、覆盖次数等信息。
③预处理:对数据进行初步清洗,包括数据解编、格式转换、道编辑、噪声去除、缺失数据插值等。
④静校正:进行野外静校正,修正由于地形、近地表速度结构变化等因素引起的传播时间差异。
⑤动校正:进行动校正以补偿地震波在不同路径长度上的传播时间差,通常基于速度模型。
⑥反褶积:压缩地震子波,提高时间分辨率,减少多次波的影响。
⑦速度分析:确定地震波在地下各层的速度,用于后续的动校正和偏移处理。
⑧剩余静校正:对动校正后的数据进行进一步的静校正,以消除残余的传播时间误差。
⑨叠加:对校正后的数据进行叠加,提高信噪比,形成叠加剖面。
⑩偏移:进行偏移处理,将地震数据从共反射点(CMP)域转换到真实地质结构的空间位置,生成偏移剖面。
⑪显示与解释:将处理后的地震数据以图像形式显示,供地质学家进行解
释,识别地层结构、断层和油气藏等。
⑫质量控制:在处理的每个阶段,进行质量控制检查,确保数据的准确性和可靠性。
地震观测系统名词解释
地震观测系统名词解释
地震观测系统是由一系列的设备组成的,用于记录和监测地震地球物理活动的系统。
它可以提供有价值的记录和信息,可以帮助预测或预警未来的地震事件。
1. 台站:是指安装有地震仪器的一组设备,用于记录和监控地震地球物理活动的地点。
2. 地震仪器:是指用于记录和监测的专用测震设备。
3. 传输系统:是指用来收集和传送台站数据的设备和软件。
4. 计算机处理系统:是指用于分析台站数据的计算机系统。
5. 存储系统:是指用于存储台站数据的系统。
6. 屏显系统:是指用于显示台站数据的系统。
7. 报警系统:是指当台站数据达到设定的门限值时,用于发出报警的系统。
- 1 -。
气象自动观测系统观测内容

气象自动观测系统观测内容气象自动观测系统(Automatic Meteorological Observation System, AMOS)是一种先进的气象观测设备,在气象预测和气候研究中有着广泛的应用。
以下是本文将要介绍的AMOS观测内容:第一,温度观测。
AMOS可以准确地测量空气、地面和水面的温度。
温度是气象预测和气候研究中的一个重要参数,直接影响着大气环流和气候的变化。
地面温度的观测对于农业、森林和建筑业等领域的决策也有着重要的作用。
第二,湿度观测。
AMOS可以实时测量空气、地面和水面的相对湿度和绝对湿度。
湿度是气象预测和气候研究中的一个重要参数,直接影响着大气的水汽含量和降水形式。
湿度也是航空、农业、能源等领域的关键参数之一。
第三,风速和风向观测。
AMOS可以准确地测量空气、地面和水面的风速和风向。
风是气象预测和气候研究中的一个重要参数,直接影响着大气的运动和传递。
航空、海洋、环境等领域的研究都需要风速和风向的数据。
第四,大气压力观测。
AMOS可以实时测量空气的气压,可用于大气运动和气象预测模型的数据支撑。
大气压力也是天气预报和环境监测中的重要参数。
第五,降水观测。
AMOS可以实时测量空气中的降雨量、降雪量和积雪深度等参数。
降水是气象预测和气候研究中的重要参数之一,也是农业、水利和环境等领域的关键参数之一。
第六,辐射观测。
AMOS可以实时测量太阳辐射、长波辐射和短波辐射等参数。
辐射是气象预测和气候研究中的重要参数之一,直接影响着大气的能量平衡和地表温度。
太阳辐射也是能源领域的重要参考数据之一。
综上所述,AMOS观测内容涵盖了温度、湿度、风速、风向、大气压力、降水和辐射等多个气象参数,在气象预测、气候研究和各领域的应用研究中都有着广泛的应用。
随着科技的不断发展,AMOS的观测能力也在不断提高,将为人类更好地了解大气环境提供更加精确的数据支撑。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
的,这些数据首先要解编。解编实际上是对
1. 一个大的矩阵进行变换,使变换后的矩阵的
预 行能按地震道读数。
处
模块:DBAIF+DBAIS+demult (时序解编)
理
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
处理基本流程
定义观测系统
根据仪器班报定义几何库,建 立起炮点和接受点的对应关系。
由于球面扩散和吸收,引起地震波的振 幅逐渐衰减,因此随着传播时间的增加,地 震波的能量越来说弱,振幅补偿主要是弥补 地震波在地下传播过程中的能量损失。振幅 补偿的应用必须小心,因为它能破坏信号的 特性。
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
处理基本流程
6. 反褶积
反褶积是通过压缩基本地震子 波以提高地震资料的时间分辨率的 过程。反褶积一般用于叠前。反褶 积能产生有更高时间分辨率的剖面。 常用的反褶积方法有:地表一致性 反褶积、脉冲反褶积、预测反褶积 和统计子波反褶积。
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
处理基本流程
0
SMG
7. 共中心点道集
中心点 S6 S5 S4 S3 S2 S1 M G1 G2 G3 G4 G5 G6
地震数据采集在炮点 ——接收点(s ,g)坐标 内进行。所示射线与
一个平的水平反射层 有关,从炮点S到几个 接收点G。
: TAPEIN UNIT1,G1234,F1,HD2=(1-100)
: HLABEL GE01
: TAPOUT UNIT1,G1235,FMT3
: END
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
处理基本流程
道编辑
用IMUTEDI交互杀掉坏炮、 坏道、极性反转道等。
IMUTEDI---DBAED--EDITOR
实例:
1.
: JOB P:USER1,L:LINE1,T:HLABEL : DBAGE GRP1:VN01,CMPX25,SX50,
预
GRP2:T1-T200,TI0.5,X1,XI0.5,
处
GRP3:S1-S100,T1,TI1,P1,
理
GRP4:S1-S100,T3,TI1, GRP6:P1,R1-R48,G1,GI1
: DISKIN
: FANMOV : AMPEQU : PLOTTR
P:XINJIANG,L:S90175 VN08,VTYPE:VRMS,
……….. VN08,SPSM6,TMSM1,INTYP0,
TEND6000,TINTY0 DFN:GSORT75,HD4=(100-200,I40,
GP4),STOP TV08 L500 G5,HEAD,SCL100,STP10,HDA4,
data(山地资料处理技术 2D or 3D) 5. Processing technical for high resolution
data(高分辩率处理技术 2D or 3D)
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
一、3D基本概念
1.Grisys Function Modules (GRISYS 模块分类) (1) I/O (输入/输出模块) (2) Preprocessing (予处理模块) (3) About field statics (有关野外静校正的模块) (4) Amplitude Processing (振幅处理模块) (5) Deconvolution (反褶积模块) (6) Velocity analysis (速度分析模块) (7) Residual statics (剩余静校) (8) Denoise modules (各种去噪模块) (9) About imaging modules (有关成象模块,叠加和偏移) (10) About quality control (有关质量控制模块) (11) About interactive modules(有关交互模块)
深度 点
地震数据处理是在 中 心 点 —— 偏 移 距 (y ,h)坐标内进行。 所示射线是一个单 一的CMP道集。
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
CMP道集分选
GASORT
GASORT模块根据用户选定的一个或两个道头字对输入地震 道进行选择和编排,以便生成处理所需要的相应道集数据
1.预处理
解编
(SEGDIN,SEGYIN)
定义观测系统
(DBAGE/HLABEL/PLOTGE,SPSGRI PLTGRD,IDFGEB)
地震道的编辑 (DBAED/EDITOR/IMUTEDI)
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
处理基本流程
解编
野外数据是以某种格式按多路方式记录
2003年11月10日
处理基本流程 8. 速度分析
地震勘探所获得的唯一参数是地震波在 地下介质中传播的垂直时间,而从时间域转 换到空间域,关键在速度参数。一个比较小 的速度变化,能产生或消除时间剖面上较大 的异常。因此,做好叠加速度分析是与叠加 和偏移并称的三个处理核心之一。速度分析 的原则是取速度谱中能量较强的谱点,反射 波同相轴被校正为水平直线,以获取最理想 的叠加速度函数。
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
处理基本流程
2. 原始资料分析
1. 单炮显示 2. 信噪比估算 3. 能量显示 4. 频率分析和扫描 5. 有效波调查 6.干扰波调查 7. 野外静校正调查
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
处理基本流程
中油油气勘探软件 GRISYS 资料处理培训讲义
返回流程
2003年11月10日
处理基本流程
12. 偏移成像
A
O
C
C’
D
在水平叠加剖面上,总是把界面 上反射点的位置显示在地面共中 B 心点下方的铅垂线上,当地层水 平时,二者位置相符;当地层倾 斜时,显示的反射点位置沿地层 下倾方向偏离了反射点的真实位 置,为了恢复地层的真实位置形
3. 静校正
静校正是研究由于地形起伏、地表低速
带横向变化对地震波传播时间的影响,并进 行校正,使时距曲线满足用于动校正的双曲 线方程。
静校正区别于动校正的是静校正对整道
升降,波形不变;动校正是时间的函数,地 震道波形变化。
类别:野外静校正、折射波静校正、 剩余静校正
中油油气勘探软件 GRISYS 资料处理培训讲义
1. 定义观测系统的目的是将工区内 预 所有涉及到的点:炮点、检波点、 处 cmp点(面元)都用一个唯一的 理 数字(站号)来标识,确定炮点
和检波点的排列图形,覆盖次数。
DBAGE:生成观测系统数据表
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
处理基本流程
置标签(hlabel)
O
O
SL1 SL3 SL5 SL7
. shot station interval = receiver station interval
. shot line interval = receiver line interval
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
处理基本流程
11. 叠后修饰
目前的处理中,叠后修饰成为不
可或缺的一步。通过叠后修饰,能大 幅度地提高剖面的质量。Grisys的叠后 修饰功能较强,主要有以下模块:
RNATTE 随机噪音衰减
POLFIT 多项式拟合
RAPFIL 径向预测滤波
2003年11月10日
处理基本流程
4. 叠前去噪
GRISYS叠前去噪模块 可以分别对面波、线性干 扰、强能量干扰、随机噪 音等干扰波进行压制。
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
处理基本流程
5. 频谱分析与振幅补偿
对选取的单炮通过频谱分析,可以了解 有效波、干扰波频率分布范围,确定合适的 滤波门,最大限度地保留有效波成分,滤除 干扰波成分。特别注意目的层频带范围。
D’
态,就必须进行偏移归位。另外 水平叠加剖面还存在绕射波没有 收敛,干涉带没有分解、回转波 没有归位等问题,这些也要通过 偏移来解决。
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
三维地震数据处理
1. 3D Basic Concepts (3D 基本概念) 2. Processing Sequence (处理流程) 3. Particular Technical (特色技术) 4. Processing technical on mountain area
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日
一. (三维基本概念)
* 3D (三维):Cross_spreads 十字形排列
full 3D observasion (全三维观测)
RL1
O
O
O
O
RL2
O
O
O
O
RL3
O
O
O
O
RL4
O
O
O
O
RL5
O
O
O
O
RL6
O
O
O
O
RL7
O
O
经过水平叠加后输出终叠剖面。
中油油气勘探软件 GRISYS 资料处理培训讲义
2003年11月10日