探究:杠杆的平衡条件实验报告
探究杠杆的平衡条件实验报告
探究杠杆的平衡条件实验报告
实验名称:探究杠杆的平衡条件
实验目的:会用质量相同的钩码探究杠杆的平衡条件
实验器材:铁架台(带铁夹)、带刻度的杠杆、钩码1盒。
实验原理:。
实验步骤:
1.调节杠杆两端的平衡螺母,使杠杆在不挂钩码时,保持并静止,达到平衡状态。
2.给杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆重新在平衡。
这时杠杆两侧受到的作用力的大小等于各自钩码所受重力的大小。
3.设右侧钩码对杠杆施的力为动力F1,左侧钩码对杠杆施的力为阻力F2;测出杠杆平衡时的动力臂l1和阻力臂l2;把F1、F2、l1、l2的数值填入表格中。
4.改变动力F1和动力臂l1的大小,相应调节阻力F2和阻力臂l2的大小,再做几次实验。
实验结论:
杠杆的平衡条件是。
实验报告——探究杠杆的平衡条件
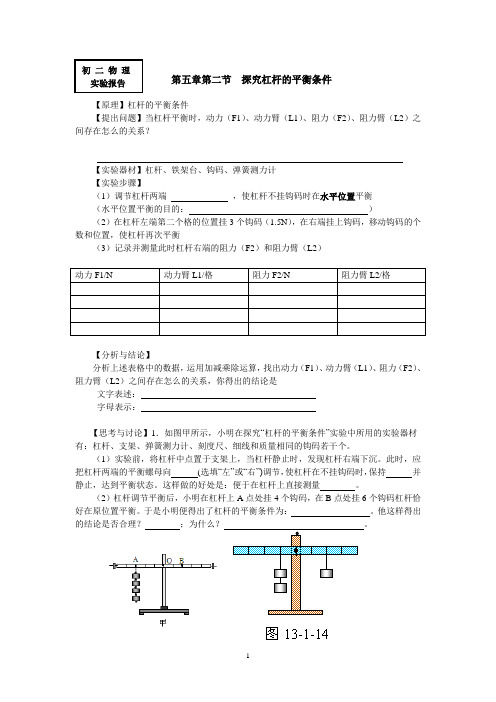
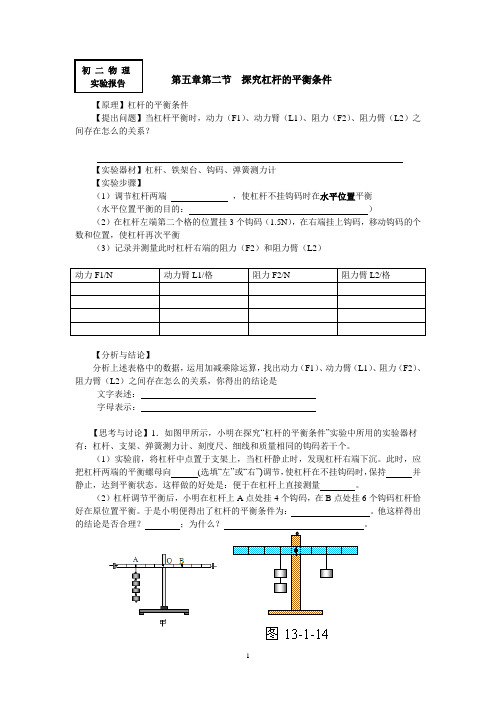
1 第五章第二节 探究杠杆的平衡条件 【原理】杠杆的平衡条件
【提出问题】当杠杆平衡时,动力(F1)、动力臂(L1)、阻力(F2)、阻力臂(L2)之间存在怎么的关系?
【实验器材】杠杆、铁架台、钩码、弹簧测力计
【实验步骤】
(1)调节杠杆两端 ,使杠杆不挂钩码时在水平位置平衡
(水平位置平衡的目的: )
(2)在杠杆左端第二个格的位置挂3个钩码(1.5N ),在右端挂上钩码,移动钩码的个数和位置,使杠杆再次平衡
(3)记录并测量此时杠杆右端的阻力(F2)和阻力臂(L2)
【分析与结论】
分析上述表格中的数据,运用加减乘除运算,找出动力(F1)、动力臂(L1)、阻力(F2)、阻力臂(L2)之间存在怎么的关系,你得出的结论是
文字表述:
字母表示:
【思考与讨论】1.如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。
此时,应把杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在不挂钩码时,保持 并静止,达到平衡状态。
这样做的好处是:便于在杠杆上直接测量 。
(2)杠杆调节平衡后,小明在杠杆上A 点处挂4个钩码,在B 点处挂6个钩码杠杆恰好在原位置平衡。
于是小明便得出了杠杆的平衡条件为: 。
他这样得出的结论是否合理? ;为什么? 。
杠杆平衡条件实验报告
杠杆平衡条件实验报告
实验目的,通过实验验证杠杆平衡条件,并掌握测量杠杆平衡条件的方法。
实验仪器和材料,杠杆平衡装置、标尺、砝码组、支撑架等。
实验原理,杠杆平衡条件是指在杠杆两端所受的力矩相等,即左端力矩等于右端力矩。
在实验中,可以通过调整砝码的位置和重量,使得杠杆保持平衡状态,从而验证杠杆平衡条件。
实验步骤:
1. 将杠杆平衡装置放置在水平桌面上,并用支撑架固定。
2. 在杠杆的一端挂上一个重物,然后在另一端使用砝码组进行调整,直到杠杆保持平衡状态。
3. 记录下砝码的重量和位置,以及杠杆两端的距离。
实验结果,通过实验测量,得到了不同砝码组合下杠杆的平衡
情况,并记录了相应的数据。
实验分析,根据实验数据,可以计算出不同砝码组合下的力矩,并验证杠杆平衡条件是否成立。
实验结论,通过实验验证,得出结论,在杠杆两端所受的力矩
相等,即左端力矩等于右端力矩,验证了杠杆平衡条件的成立。
存在的问题,在实验过程中,可能存在测量误差和实验操作不
当等问题,需要进一步改进和提高实验技能。
改进措施,在今后的实验中,应该加强实验操作的规范性和准
确性,提高实验技能,减小测量误差。
自查总结,通过本次实验,我对杠杆平衡条件有了更深入的理解,同时也发现了自己在实验操作和数据处理方面的不足之处,需
要加强自身的实验技能和提高对实验原理的理解。
杠杆平衡条件实验报告

杠杆平衡条件实验报告本文旨在探讨杠杆平衡条件的实验,主要包括实验背景、实验目的、实验原理、实验步骤、实验结果分析和实验结论等方面。
一、实验背景在物理学中,杠杆是一种重要的机械工具,常用于测量物体的重量或力的大小等。
而杠杆平衡条件则是杠杆平衡的基本规律,即杠杆两侧所受的力矩相等。
在力学学科中,杠杆平衡条件被广泛地应用于机械设计、工程测量等领域。
二、实验目的本次实验旨在通过引入杠杆平衡条件,验证杠杆的平衡状态,并探讨如何使用杠杆平衡条件解决实际问题。
三、实验原理1、力矩定义力矩是力学中非常重要的物理量,表示力的作用方式的旋转性质。
它的基本定义是由一个力对物体产生的转动效果的大小与方向的量度。
2、杠杆平衡条件当用杠杆支撑物体时,如果使得物体有平衡而不产生旋转,则应使杠杆两侧的力矩相等。
即F1×D1=F2×D2其中,F1和F2分别表示作用于杠杆两侧的力,D1和D2分别表示杠杆两端到支点的距离。
3、重心定理重心是物体所具有的一个代表物体整体质量分布位置的点,也叫做质心。
在实际中,我们可以通过平衡某些物体的重心来达到平衡的目的。
同时,重心还可用来求解物体的密度、形状等信息。
四、实验步骤1、准备实验器材,如杠杆和几组不均匀的金属物体等。
2、找到杠杆上的支点,并记录下支点的位置。
3、将不同重量的金属物体分别放在杠杆的两侧,记录下各自的重量和到支点距离。
4、移动物体位置,直至杠杆处于平衡状态,记录下物体位置以及平衡状态下沿着杠杆的两端所施加的力的大小。
5、根据杠杆平衡条件及重心定理,求出各组金属物体的重心位置,并与实际测量位置作对比分析。
6、修改杠杆系统,通过杠杆平衡条件求解出某些未知量,如力、距离等。
五、实验结果分析通过本次实验,我们成功地验证了杠杆平衡条件,并进一步领悟了力矩和重心定理的应用。
在实验过程中,我们发现杠杆平衡条件对平面力学的应用非常广泛,可以帮助我们更好地理解和解决实际问题。
探究杠杆的平衡条件试验报告
探究杠杆的平衡条件试验报告实验报告:探究杠杆的平衡条件一、实验目的:通过进行杠杆实验,探究杠杆的平衡条件,理解杠杆的物理原理。
二、实验器材:1.实验平台。
2.杠杆。
3.不同质量的砝码。
4.质量计。
5.实验吊钩。
6.实验手柄。
7.实验固定杆。
8.实验观察尺。
三、实验原理:杠杆是一个用来增强或改变力矩的装置。
杠杆可以由一个能够绕自己的轴旋转的支点分为两个部分,一部分是力臂,一部分是负载臂。
在平衡状态下,杠杆的转动力矩之和为零,即力臂乘以作用力的和等于负载臂乘以负载的和。
四、实验步骤:1.将实验平台放置在水平桌面上,并固定好。
2.将杠杆置于实验平台上的支点上,确保杠杆可以自由旋转。
3.在杠杆的一侧的力臂上,固定一个实验手柄,并将手柄上的固定杆插入杠杆的孔中。
4.通过质量计测量实验手柄的重量,并将该数值记录下来。
5.在杠杆的另一侧的负载臂上,固定一个实验吊钩,并调整吊钩的位置使其与支点在同一直线上。
6.往吊钩上加上一个初始重量,并记录下该重量。
7.往吊钩上分别加上不同质量的砝码,每次加完一个砝码后,记录下吊钩上的总重量。
8.测量并记录下杠杆的力臂和负载臂的长度。
9.反复加上不同质量的砝码,记录吊钩的总重量,直到杠杆保持平衡状态。
10.根据实验数据计算杠杆的平衡条件,并进行分析。
五、实验数据记录:实验手柄重量:______g(记录的值)初始负载重量:______g(记录的值)砝码质量(g)吊钩总重量(g)_______________________________________________________________________________________________________________________________________力臂长度:________cm(记录的值)负载臂长度:________cm(记录的值)六、实验结果和分析:根据实验数据计算杠杆平衡条件,即力臂与负载臂的力矩之和为零。
实验报告:探究杠杆平衡的条件
实验报告:探究杠杆平衡的条件一、实验目的1. 了解杠杆平衡的条件,验证杠杆原理;2. 学习使用杠杆实验器材,提高动手能力;3. 培养观察、分析、解决问题的能力。
二、实验原理杠杆平衡的条件:在一个平衡的杠杆系统中,力与力矩的乘积相等,即F1 ×L1 = F2 ×L2,其中F1和F2分别为作用在杠杆两端的力,L1和L2分别为力F1和F2到杠杆支点的距离。
三、实验器材与步骤1. 器材:杠杆实验器材(含杠杆、支点、钩码、弹簧测力计等);2. 步骤:(1)将杠杆固定在支点上,调节杠杆两侧的平衡螺母,使杠杆在水平位置平衡;(2)在杠杆左侧挂上钩码,记录钩码质量m1和对应的力F1,在杠杆右侧挂上钩码,记录钩码质量m2和对应的力F2;(3)测量力F1和F2到支点的距离L1和L2;(4)计算力矩M1和M2,比较M1和M2的大小,验证杠杆平衡条件;(5)重复步骤2-4,多组数据求平均值,提高实验结果的准确性。
四、实验数据与分析1. 实验数据:(1)m1 = 20g,F1 = 0.5N,L1 = 0.2m;(2)m2 = 30g,F2 = 0.7N,L2 = 0.3m;(3)m3 = 40g,F3 = 0.9N,L3 = 0.4m;……(5)mi = 100g,Fi = 2.0N,Li = 1.0m;2. 分析:(1)计算力矩M1和M2:M1 = F1 ×L1,M2 = F2 ×L2;(2)比较M1和M2的大小:M1 ≈M2;(3)根据实验数据,发现杠杆平衡时,力与力矩的乘积相等,验证杠杆平衡条件;(4)通过多组数据求平均值,提高实验结果的准确性。
五、实验结论通过实验探究,得出以下结论:1. 杠杆平衡的条件为:F1 ×L1 = F2 ×L2;2. 实验中,杠杆平衡时,力与力矩的乘积相等;3. 实验数据的平均值验证了杠杆平衡条件的正确性。
六、实验注意事项1. 实验过程中,要注意杠杆的平衡调节,避免杠杆倾斜;2. 测量力矩时,要准确记录力与力臂的大小;3. 多次实验,求平均值,提高实验结果的可靠性;4. 遵守实验规程,确保实验安全。
探究杠杆平衡条件实验报告
探究杠杆平衡条件实验报告探究杠杆平衡条件实验报告引言:杠杆平衡条件是物理学中一个重要的概念,它描述了一个物体在平衡状态下所满足的条件。
通过实验,我们可以更深入地了解杠杆平衡条件的原理和应用。
本文将探究杠杆平衡条件的实验过程和结果,并对实验结果进行分析和讨论。
实验目的:通过实验验证杠杆平衡条件,并观察杠杆平衡时的现象。
实验器材:1. 杠杆2. 支点3. 物体(如砝码)4. 测力计5. 尺子实验步骤:1. 将杠杆放置在支点上,确保杠杆可以自由旋转。
2. 在杠杆的一侧悬挂一个物体(如砝码),并调整位置,使其与支点之间的距离为d1。
3. 在杠杆的另一侧使用测力计,将其固定在杠杆上,并调整位置,使其与支点之间的距离为d2。
4. 逐渐增加或减小测力计的读数,直到杠杆平衡。
5. 记录测力计的读数,并测量d1和d2的值。
实验结果:在实验过程中,我们观察到以下现象:1. 当测力计的读数增加时,杠杆的平衡点向物体一侧移动。
2. 当测力计的读数减小时,杠杆的平衡点向物体另一侧移动。
3. 当测力计的读数等于零时,杠杆保持平衡状态。
实验分析:根据实验结果,我们可以得出以下结论:1. 杠杆平衡条件成立,即杠杆在平衡状态下满足力矩平衡条件。
2. 在杠杆平衡时,杠杆两侧的力矩相等。
3. 杠杆平衡的位置取决于物体与支点之间的距离和施加在杠杆上的力的大小。
实验讨论:通过本次实验,我们深入了解了杠杆平衡条件的原理和应用。
杠杆平衡条件在日常生活中有着广泛的应用,例如梯子的平衡、剪刀的平衡等。
了解杠杆平衡条件可以帮助我们更好地理解这些现象。
然而,实验中可能存在一些误差。
首先,测力计的读数可能存在一定的误差。
其次,杠杆和支点的摩擦力也可能对实验结果产生一定的影响。
为了减小误差,我们可以使用更精确的测力计和尺子,并在实验中尽量减少杠杆和支点的摩擦。
结论:通过本次实验,我们验证了杠杆平衡条件,并观察到了杠杆平衡时的现象。
实验结果表明,杠杆平衡条件成立,并且杠杆平衡的位置取决于物体与支点之间的距离和施加在杠杆上的力的大小。
杠杠平衡的实验报告

一、实验目的通过本实验,探究杠杆的平衡条件,即动力、动力臂、阻力、阻力臂之间的关系,验证杠杆平衡的基本原理。
二、实验器材1. 杠杆(含支架)2. 钩码盒3. 弹簧测力计4. 细线5. 刻度尺6. 记录表格三、实验原理根据杠杆平衡原理,当杠杆处于平衡状态时,动力乘以动力臂等于阻力乘以阻力臂,即F1L1 = F2L2。
四、实验步骤1. 调节杠杆两端的平衡螺母,使杠杆在不挂钩码时保持水平并静止,达到平衡状态。
2. 在杠杆的右端挂上一定数量的钩码,假设产生的拉力为动力F1,同时记录动力臂L1。
3. 在杠杆的左端挂上一定数量的钩码,假设产生的拉力为阻力F2,同时记录阻力臂L2。
4. 改变动力F1和动力臂L1的大小,相应调节阻力F2和阻力臂L2,使杠杆重新达到平衡状态,记录下此时动力、动力臂、阻力、阻力臂的数值。
5. 重复步骤2-4,进行多次实验,记录实验数据。
五、实验数据记录与分析实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm | F1L1/F2L2------- | -------- | ------------ | -------- | ------------ | ------------1 | 1 | 10 |2 | 5 | 22 | 2 | 15 |3 | 7.5 | 23 | 3 | 20 |4 | 10 | 2根据实验数据,可以发现动力乘以动力臂与阻力乘以阻力臂的比值在三次实验中均接近2,说明动力乘以动力臂等于阻力乘以阻力臂的平衡条件成立。
六、实验结论通过本实验,验证了杠杆平衡的基本原理,即动力乘以动力臂等于阻力乘以阻力臂。
在实验过程中,改变动力和阻力的大小,以及动力臂和阻力臂的长度,杠杆均能重新达到平衡状态,进一步验证了杠杆平衡条件的正确性。
七、实验讨论1. 在实验过程中,杠杆两端的重力应尽量保持一致,以减少重力对实验结果的影响。
2. 实验数据应多次测量,以提高实验结果的准确性。
探究杠杆的平衡条件实验报告
探究杠杆的平衡条件实验报告实验目的:通过进行杠杆的平衡条件实验,了解杠杆平衡的条件和原理。
实验原理:杠杆是一种简单机械原理,通过一个固定的支点,将输入力或力矩转化为输出力或力矩。
杠杆平衡的条件是,杠杆两边的力矩相等。
力矩是由力的大小和作用点到支点的距离决定的。
即F1*d1=F2*d2实验器材:1.杠杆支架2.两个不同质量的挂物3.悬挂重物的线4.尺子5.弹簧测力计实验步骤:1.将杠杆支架稳定地放置在水平桌面上,调整好平衡。
2.将一个挂物悬挂在杠杆的一侧,并记录其离支点的距离为d13.移动另一侧的挂线,直到杠杆平衡。
4.记录第二个挂物的距离d25.使用尺子测量d1和d2的值,并记录下来。
6.使用弹簧测力计分别测量挂物的重量F1和F2,并记录下来。
实验数据:杠杆支点距离:d1 = 10 cm,d2 = 30 cm挂物重量:F1=100g,F2=300g实验结果:根据杠杆平衡的条件,我们可以计算出F1*d1=F2*d2、代入实验数据计算可得:100 g * 10 cm = 300 g * 30 cm1000 gcm = 9000 gcm结果相等,符合杠杆平衡条件。
实验讨论:通过实验,我们验证了杠杆平衡的条件。
杠杆的平衡取决于力的作用点与支点的距离,而不仅仅是力的大小。
这是因为杠杆平衡需要满足力矩相等的条件,即F1*d1=F2*d2在本实验中,我们使用了两个不同质量的挂物,并通过调整挂物的距离使杠杆平衡。
根据杠杆平衡的原理,我们可以通过调整不同挂物的距离来平衡杠杆,而不仅仅是通过增加或减少挂物的重量。
实验中的误差可能来自于测量距离和重量的不准确。
因此,在进行实验时,我们应该仔细测量和记录相关数据,并注意使用准确的测量工具。
总结:通过杠杆平衡条件实验,我们了解了杠杆平衡的条件和原理。
杠杆平衡取决于力的大小和作用点到支点的距离,通过调整不同挂物的距离可以平衡杠杆。
在实际应用中,杠杆原理被广泛应用于很多领域,如天平、绳索电梯等。
物理实验报告杠杆平衡
一、实验目的通过本次实验,掌握杠杆平衡的基本原理,了解杠杆平衡条件,并通过实验验证杠杆平衡条件,提高对物理实验的理解和操作能力。
二、实验原理杠杆平衡条件:动力×动力臂 = 阻力×阻力臂其中,动力是指使杠杆转动的力,阻力是指阻碍杠杆转动的力,动力臂是指从支点到动力作用线的距离,阻力臂是指从支点到阻力作用线的距离。
三、实验器材1. 杠杆(含支架)2. 钩码盒一套3. 弹簧测力计4. 细线5. 刻度尺四、实验步骤1. 将杠杆放置在支架上,调节杠杆两端的平衡螺母,使杠杆在不挂钩码时,保持水平并静止,达到平衡状态。
2. 在杠杆的左右两端分别用细线依次悬挂不同数量的钩码,假设左端砝码的重力产生的拉力为阻力F2,右端钩码的重力产生的拉力为动力F1。
3. 先固定F1大小和动力臂l1的大小,再选择适当的阻力F2,然后移动阻力作用点,即改变阻力臂l2大小,直至杠杆平衡。
4. 量出杠杆平衡时的动力F1、动力臂l1、阻力F2和阻力臂l2的数值,并将实验数据记录在表格中。
5. 改变力和力臂的数值,再做两次实验,重复步骤3和步骤4。
6. 根据实验数据,分析动力、动力臂、阻力、阻力臂之间的关系,验证杠杆平衡条件。
五、实验数据及处理实验次数 | 动力F1/N | 动力臂l1/cm | 阻力F2/N | 阻力臂l2/cm-------- | -------- | -------- | -------- | --------1 |2 | 10 | 1 | 52 |3 | 15 | 1.5 | 7.53 |4 | 20 | 2 | 10根据实验数据,可以得出以下结论:1. 当动力F1、动力臂l1、阻力F2、阻力臂l2的数值满足动力×动力臂 = 阻力×阻力臂时,杠杆处于平衡状态。
2. 在实验过程中,随着动力和阻力的大小变化,动力臂和阻力臂的大小也会发生变化,但只要满足杠杆平衡条件,杠杆就能保持平衡。
杠杆平衡条件实验报告
杠杆平衡条件实验报告
实验目的:
通过实验,验证杠杆平衡条件的成立,并掌握杠杆平衡条件的实验方法。
实验仪器和材料:
1. 杠杆平衡实验装置。
2. 不同质量的物体。
3. 杠杆平衡实验记录表。
实验原理:
杠杆平衡条件是指在一个杠杆上,当两个物体的力矩相等时,杠杆达到平衡状态。
即力矩的平衡条件可以表示为,F1 × l1 = F2 × l2,其中F1和F2分别为作用在杠杆两端的力,l1和l2分别为力的作用点到杠杆支点的距离。
实验步骤:
1. 将杠杆平衡实验装置放置在水平桌面上,并调整使其水平。
2. 在杠杆的两端分别挂上不同质量的物体,并记录下各自的质量和距离。
3. 通过调整物体的位置,使得杠杆平衡,记录下各自的位置。
4. 根据记录的数据,计算出各个物体的力矩,并验证杠杆平衡条件是否成立。
实验结果:
通过实验记录表和计算,得出各个物体的力矩,并验证杠杆平衡条件成立。
实验结论:
在本次实验中,我们成功验证了杠杆平衡条件的成立,并掌握了杠杆平衡条件的实验方法。
同时,通过实验,加深了对力矩平衡
条件的理解,提高了实验操作能力。
存在问题:
在实验中,我们发现在调整物体位置使得杠杆平衡时,需要耐心和细心,以保证实验结果的准确性。
改进措施:
在以后的实验中,我们将更加细心地进行实验操作,以提高实验结果的准确性。
实验人员签名,__________ 日期,__________。
探究杠杆的平衡条件实验报告
探究杠杆的平衡条件实验报告实验目的:实验原理:杠杆是一种简单机械装置,由杠杆臂和支点组成。
杠杆的平衡条件可以通过杠杆的力矩平衡来描述。
力矩平衡是指杠杆的力矩的和为零,即力矩的乘积等于力的乘积。
根据力矩平衡原理,可以得出杠杆的平衡条件为“左力乘左力臂等于右力乘右力臂”。
实验器材:1.杠杆臂2.支点3.锚点4.重物5.细线6.尺子7.钳子实验步骤:1.将支点固定在桌子上,确保杠杆稳定。
2.将杠杆臂与支点连接,并将锚点固定在杠杆臂上。
3.在杠杆臂的另一侧,挂上重物,用细线将重物与杠杆臂固定。
4.使用尺子测量左力臂和右力臂的长度。
5.调整锚点的位置,使得杠杆保持平衡。
6.测量左力和右力的大小,以及杠杆的长度。
7.重复实验多次,记录实验数据。
实验数据和结果:实验数据表明,通过调整锚点的位置,可以使杠杆保持平衡。
左力臂乘以左力等于右力臂乘以右力。
根据实验数据计算得出的力矩平衡结果与理论预期相符。
实验讨论与分析:1.实验表明,杠杆的平衡条件可以通过力矩平衡来解释。
根据力矩平衡原理,可以得出杠杆的平衡条件为“左力乘左力臂等于右力乘右力臂”。
2.在实验过程中,我们发现调整锚点的位置可以使杠杆保持平衡。
这表明杠杆的平衡与支点的位置有关,支点越靠近重物一侧,杠杆越容易平衡。
实验结论:通过实验我们探究了杠杆的平衡条件,并发现可以通过力矩平衡来解释杠杆的平衡。
实验结果与理论预期相符。
实验总结:本次实验通过搭建杠杆实验装置,探究了杠杆的平衡条件。
实验结果与理论预期相符,验证了力矩平衡原理在杠杆上的适用性。
实验过程中我们还发现杠杆的平衡与支点的位置有关,支点越靠近重物一侧,杠杆越容易平衡。
这个实验让我们更深入地理解了杠杆的原理和应用。
实验报告——探究杠杆的平衡条件
初二物理第五章第二节探究杠杆的平衡条件实验报告【原理】杠杆的平衡条件【提出问题】当杠杆平衡时,动力(F1)、动力臂(L1)、阻力(F2)、阻力臂(L2)之间存在怎么的关系?【实验器材】杠杆、铁架台、钩码、弹簧测力计【实验步骤】(1)调节杠杆两端,使杠杆不挂钩码时在水平位置平衡(水平位置平衡的目的:)(2)在杠杆左端第二个格的位置挂3个钩码(1.5N),在右端挂上钩码,移动钩码的个数和位置,使杠杆再次平衡(3)记录并测量此时杠杆右端的阻力(F2)和阻力臂(L2)动力F1/N 动力臂L1/格阻力F2/N 阻力臂L2/格【分析与结论】分析上述表格中的数据,运用加减乘除运算,找出动力(F1)、动力臂(L1)、阻力(F2)、阻力臂(L2)之间存在怎么的关系,你得出的结论是文字表述:字母表示:【思考与讨论】1.如图甲所示,小明在探究“杠杆的平衡条件”实验中所用的实验器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个。
(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉。
此时,应把杠杆两端的平衡螺母向(选填“左”或“右”)调节,使杠杆在不挂钩码时,保持并静止,达到平衡状态。
这样做的好处是:便于在杠杆上直接测量。
(2)杠杆调节平衡后,小明在杠杆上A点处挂4个钩码,在B点处挂6个钩码杠杆恰好在原位置平衡。
于是小明便得出了杠杆的平衡条件为:。
他这样得出的结论是否合理?;为什么?。
122.如图13-1-14所示,此时杠杆平衡,若在右端钩码下加挂2个等重的钩码,左端钩码的位置应当向 移动 格,才能使杠杆重新平衡.3.如图是研究杠杆平衡条件的实验装置,要想使杠杆平衡,A 处钩码应挂A .1个B .2个C .3个D .6个4.如图14—4,O 是支点,在B 端挂一重物,为使杠杆平衡,要在A 端加一个力, 下列说法正确的是( )A.F 1最小B.F3最小C.F 2最小D.一样大5. 如图1所示,O 为杠杆的支点,在杠杆的右端B 点挂一重物.MN 是以A 为圆心的弧形导轨,绳的一端系在杠杆的A 点,另一端E 可以在弧形导轨上自由滑动.当绳的E 端从导轨的一端N 点向另一端M 点滑动的过程中,杠杆始终水平,绳AE 对杠杆拉力的变化情况是( )A .先变大,后变小B .先变小,后变大C. 一直变小D.一直变大 【计算练习】1. 已知动力为200N,动力臂为0.8m ,阻力臂为0.2m ,求阻力是多少?2. 某人用一根轻质硬棒去撬动A 端一块重500N 的石头,已知支点O 距A 端作用线0.2m ,o点距人手作用线的距离为1m ,问人至少用多少N 的力才能撬起石头?3. 某人用一根轻质硬棒去撬动A 端一块重1000N 的石头,已知支点O 距A 端作用线0.2m ,某人用250N 的力就将石头撬起,问支点O 距人手作用线的距离是多少?A BO AF 2F 3F 1 图14—4 A3课堂练习1.图甲中O 是杠杆的支点,在图中画出F1的力臂1、(05武汉)在“研究杠杆平衡条件”实验中:(1)实验前出现图甲所示情况,为了使杠杆在水平位置平衡,应将杠杆左端的螺母向 调(填“左”或“右”)A(2)实验过程中出现图乙所示情况,为了使杠杆在水平位置平衡,这时应将右边的钩码向(填“左”或“右”)移动 格。
探究:杠杆的平衡条件实验报告绝对

探究:杠杆的平衡条件
作者:广西崇左市桐中梁洪章
一、探究目的:杠杆的平衡条件
二、实验器材:杠杆、钩码盒一套、弹簧测力计、细线、刻度尺
三、探究假设:杠杆的平衡可能与“动力和力臂的乘积”、“阻力和阻力臂的乘积”有关。
四、实验步骤:步骤1、调节杠杆两端的平衡螺母,使横梁平衡。
步骤2、在杠杆的左右两端分别用细线依次悬挂个数不同钩码【每一个钩码50g=0.05kg,重为:
G=mg=0.05kg×10N/kg=0.5N】,(假设左端砝码的重力产生的拉力为阻力F2,右端钩码的重力产生的拉
力为动力F1,)先固定F1大小和动力臂l1的大小,再选择适当的阻力F2,然后移动阻力作用点,改变阻力臂l?2大小,直至杠杆平衡,分别记录下此时动力F1、动力臂l1、阻力F2和阻力臂l?2的数值,并将实
验数据记录在表格中。
步骤3、固定F1大小和动力臂l1的大小,改变阻力F2的大小,在移动阻力作用点,改变阻力臂l?2大小,直至杠杆平衡,记录下此时的阻力F2和阻力臂l?2的数值,并填入到实验记录表格中。
步骤4、改变动力F1的大小,保持动力臂l1的大小以及阻力F2大小不变,再改变阻力F2作用点,直至杠杆重新平衡,记录下此时动力F1大小和阻力臂l?2的大小,并填入到实验数据记录表。
步骤5、整理实验器材。
五、数据记录:实验数据记录表如下:
六、分析论证:根据实验记录数据,探究结论是:动力×动力臂=阻力×阻力臂公式表示:
F1L1=F2L2
思考:在上述探究实验中,为什么每次都要使杠杆在水平位置保持平衡?
答:可以方便用刻度尺来直接测出实验中杠杆的力臂大小。
杠杆平衡条件实验报告
杠杆平衡条件实验报告一、实验目的:1. 理解杠杆平衡条件的概念和原理;2. 掌握通过实验验证杠杆平衡条件的方法;3. 分析实验结果,验证杠杆平衡条件的成立。
二、实验设备和材料:1. 杠杆实验装置,包括杠杆、支点、负重、测力计等;2. 实验台;3. 实验记录表;4. 实验数据处理软件。
三、实验步骤:1. 将杠杆实验装置放置在实验台上,并确保支点固定稳定;2. 在杠杆的一侧悬挂一个负重,使杠杆处于不平衡状态;3. 在杠杆另一侧使用测力计测量受力大小;4. 记录测力计示数,并计算实际受力大小;5. 移动负重的位置,重复步骤3和4,记录不同位置下的受力大小;6. 根据实验数据,验证杠杆平衡条件的成立。
四、实验数据记录:| 负重位置(cm) | 测力计示数(N) | 实际受力大小(N)|。
|--------------|----------------|----------------|。
| 10 | 2.5 | 2.5 |。
| 15 | 4.0 | 4.0 |。
| 20 | 5.5 | 5.5 |。
| 25 | 7.0 | 7.0 |。
| 30 | 8.5 | 8.5 |。
五、实验结果分析:根据实验数据记录表,可以观察到在不同负重位置下,测力计示数和实际受力大小保持一致。
这表明在杠杆平衡条件下,杠杆两侧的受力大小相等。
六、结论:通过本次实验,我们验证了杠杆平衡条件的成立。
根据杠杆平衡条件,当杠杆两侧的受力大小相等时,杠杆处于平衡状态。
实验结果与杠杆平衡条件的预期一致,进一步验证了该条件的正确性。
七、实验总结:本次实验通过杠杆平衡条件的验证,加深了对该物理原理的理解。
同时,实验过程中也掌握了使用测力计测量受力大小的方法,并学会了数据记录和分析的基本技巧。
通过实验结果的分析,我们进一步巩固了杠杆平衡条件的概念和原理。
在今后的学习和实践中,我们将更加注重实验数据的准确性和实验步骤的规范性,以获得更可靠的实验结果。
杠杆平衡条件实验报告
杠杆平衡条件实验报告
实验目的:
通过实验,验证杠杆平衡条件,并掌握杠杆平衡条件的实验方法。
实验仪器和材料:
1. 杠杆平衡条件实验仪。
2. 不同质量的砝码。
3. 支撑架。
4. 实验台。
5. 量具。
实验原理:
杠杆平衡条件是指在杠杆平衡时,两边所受的力矩相等。
即F1 × l1 = F2 × l2。
在实验中,通过改变不同的质量砝码,使得杠杆平衡,从而验证杠杆平衡条件。
实验步骤:
1. 将支撑架固定在实验台上,并安装好杠杆平衡条件实验仪。
2. 调整杠杆平衡条件实验仪,使得杠杆处于平衡状态。
3. 在杠杆的一端挂上一个质量砝码,观察杠杆是否失去平衡。
4. 根据失去平衡的情况,调整砝码的质量和位置,使得杠杆重新平衡。
5. 测量不同位置的砝码的质量和距离,记录数据。
实验结果:
通过实验,我们验证了杠杆平衡条件,并且得到了一组数据。
根据实验数据,我们可以计算出不同位置的力矩,并验证杠杆平衡条件。
实验结论:
通过实验,我们掌握了杠杆平衡条件的实验方法,并验证了杠
杆平衡条件。
实验结果与理论分析相符合,实验达到了预期的目的。
存在的问题和改进方向:
在实验中,我们发现在调整砝码位置时,需要耐心和细心,以
确保杠杆能够平衡。
在以后的实验中,我们需要更加仔细地调整砝
码的位置,以获得更加准确的实验数据。
自查人,XXX 日期,XXXX年XX月XX日。
探究杠杆的平衡条件实验报告

探究杠杆的平衡条件实验报告1. 实验背景嘿,大家好!今天我们来聊聊杠杆,没错,就是那种看起来简单,却能让你感受到“力”的奥秘的家伙。
杠杆的原理听起来有点复杂,但实际上它就像一个老朋友,随时在你身边,比如说用扳手拧螺母,或者在秋游的时候,找根棍子撬开一个大石头。
杠杆的平衡条件,就是要找到那个让两边力量恰好平衡的点,听起来是不是有点哲学的味道?不过别担心,我们今天的实验就是为了让这些理论变得活灵活现!2. 实验准备2.1 材料准备好吧,首先我们得准备一些工具,别怕,咱们只需要一些简单的东西。
准备一根长木棒,最好是比较轻的,能找到的就行。
接着要有一个支点,找一个小木块或者瓶子都行,千万不要用你家那只老虎牌瓷器,哈哈!再准备一些小的重物,比如硬币、书本,或者什么可以加重的东西,随便来点就行。
2.2 实验步骤接下来,我们要开始实验了。
首先,把木棒放在支点上,确保它能摇摇晃晃,像个喝醉了的朋友一样,哈哈!然后,在木棒的一边放上重物,另一边则不放,看看它会不会倾斜。
没错,这就是我们的第一步,试试它的平衡感如何。
然后,慢慢在另一边加重物,直到两边平衡,记得仔细观察哦,这可不是一件容易的事,得有点耐心。
3. 实验结果与分析3.1 观察结果终于到了最刺激的时刻!在你加重物的时候,木棒会慢慢向一边倾斜,像在表演杂技一样。
不过,随着你不断地添加重物,终于有那么一瞬间,两边的力量达成了微妙的平衡,那一刻就像发现了新大陆一样,真是太棒了!这时候,你可以开始记录这个重量,看看需要多少重物才能让杠杆保持平衡。
记得,万事开头难,找到那个平衡点可是需要一点智慧的!3.2 理论分析通过这个实验,我们能看到杠杆的平衡条件其实是一个简单而又美妙的道理。
根据杠杆原理,力量和距离成反比,也就是说,如果你在一边加了重物,那另一边就得增加距离,才能保持平衡。
听起来有点抽象?其实就是让我们明白,有时候为了让事情更顺利,我们得做出一些调整,生活也是一样,有些时候,你得让步,才能找到和谐的状态。
实验15 探究杠杆平衡条件的实验(解析版)
实验十五探究杠杆平衡条件的实验【探究目的】:杠杆的平衡条件【实验器材】:杠杆、钩码盒一套、弹簧测力计、细线、刻度尺;【探究假设】:杠杆的平衡可能与“动力和力臂的乘积”、“阻力和阻力臂的乘积”有关。
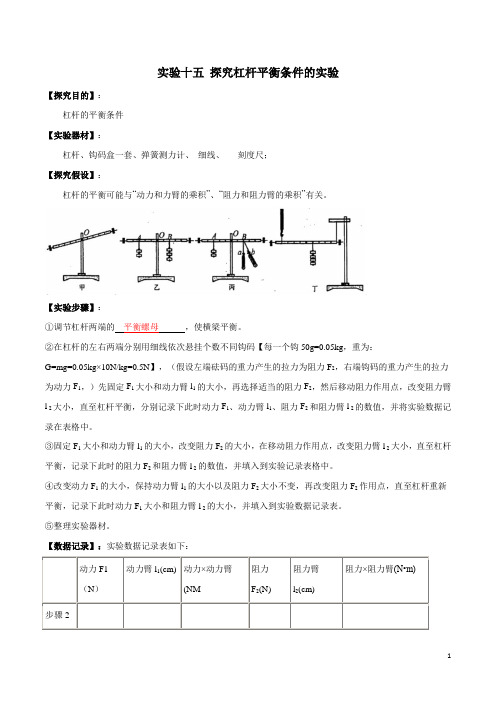
【实验步骤】:①调节杠杆两端的平衡螺母,使横梁平衡。
②在杠杆的左右两端分别用细线依次悬挂个数不同钩码【每一个钩50g=0.05kg,重为:G=mg=0.05kg×10N/kg=0.5N】,(假设左端砝码的重力产生的拉力为阻力F2,右端钩码的重力产生的拉力为动力F1,)先固定F1大小和动力臂l1的大小,再选择适当的阻力F2,然后移动阻力作用点,改变阻力臂l 2大小,直至杠杆平衡,分别记录下此时动力F1、动力臂l1、阻力F2和阻力臂l 2的数值,并将实验数据记录在表格中。
③固定F1大小和动力臂l1的大小,改变阻力F2的大小,在移动阻力作用点,改变阻力臂l 2大小,直至杠杆平衡,记录下此时的阻力F2和阻力臂l 2的数值,并填入到实验记录表格中。
④改变动力F1的大小,保持动力臂l1的大小以及阻力F2大小不变,再改变阻力F2作用点,直至杠杆重新平衡,记录下此时动力F1大小和阻力臂l 2的大小,并填入到实验数据记录表。
⑤整理实验器材。
【数据记录】:实验数据记录表如下:动力F1(N)动力臂l1(cm) 动力×动力臂(NM阻力F2(N)阻力臂l2(cm)阻力×阻力臂(N•m)步骤2步骤3步骤4【实验结论】:根据实验记录数据,探究结论是:动力×动力臂=阻力×阻力臂公式表示:F1L1=F2L2思考:在上述探究实验中,为什么每次都要使杠杆在水平位置保持平衡?答:可以方便用刻度尺来直接测出实验中杠杆的力臂大小【考点方向】:1、实验前杠杆的调节:左高右调,右高左调。
平衡后实验过程中不能在调节平衡螺母。
2、将杠杆调成水平平衡的目的是:便于测量力臂3、选择杠杆终点作为支点的好处:消除杠杆自身重力对实验的影响。
探究:杠杆的平衡条件实验报告
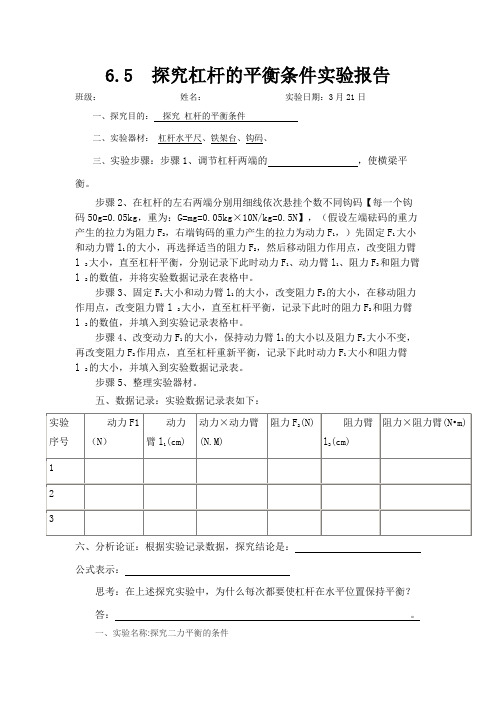
6.5 探究杠杆的平衡条件实验报告班级:姓名:实验日期:3月21日一、探究目的:探究杠杆的平衡条件二、实验器材:杠杆水平尺、铁架台、钩码、三、实验步骤:步骤1、调节杠杆两端的,使横梁平衡。
步骤2、在杠杆的左右两端分别用细线依次悬挂个数不同钩码【每一个钩码50g=0.05kg,重为:G=mg=0.05kg×10N/kg=0.5N】,(假设左端砝码的重力产生的拉力为阻力F2,右端钩码的重力产生的拉力为动力F1,)先固定F1大小和动力臂l1的大小,再选择适当的阻力F2,然后移动阻力作用点,改变阻力臂l2大小,直至杠杆平衡,分别记录下此时动力F1、动力臂l1、阻力F2和阻力臂l2的数值,并将实验数据记录在表格中。
步骤3、固定F1大小和动力臂l1的大小,改变阻力F2的大小,在移动阻力作用点,改变阻力臂l2大小,直至杠杆平衡,记录下此时的阻力F2和阻力臂l2的数值,并填入到实验记录表格中。
步骤4、改变动力F1的大小,保持动力臂l1的大小以及阻力F2大小不变,再改变阻力F2作用点,直至杠杆重新平衡,记录下此时动力F1大小和阻力臂l2的大小,并填入到实验数据记录表。
步骤5、整理实验器材。
五、数据记录:实验数据记录表如下:实验序号动力F1(N)动力臂l1(cm)动力×动力臂(N.M)阻力F2(N) 阻力臂l2(cm)阻力×阻力臂(N•m)123六、分析论证:根据实验记录数据,探究结论是:公式表示:思考:在上述探究实验中,为什么每次都要使杠杆在水平位置保持平衡?答:。
一、实验名称:探究二力平衡的条件7.4 探究二力平衡的条件实验报告班级:姓名:实验日期:4月23日一、实验目的:学会用控制变量法的思想探究问题的方法 ; 通过实验总结二力平衡的条件 ;二、实验器材:弹簧测力计;木块;质量不等砝码几个;细线;托盘三、实验原理 :物体受几个力作用,若能保持匀速直线运动状态或静止状态那么这几个力相互平衡。
探究杠杆的平衡条件实验报告
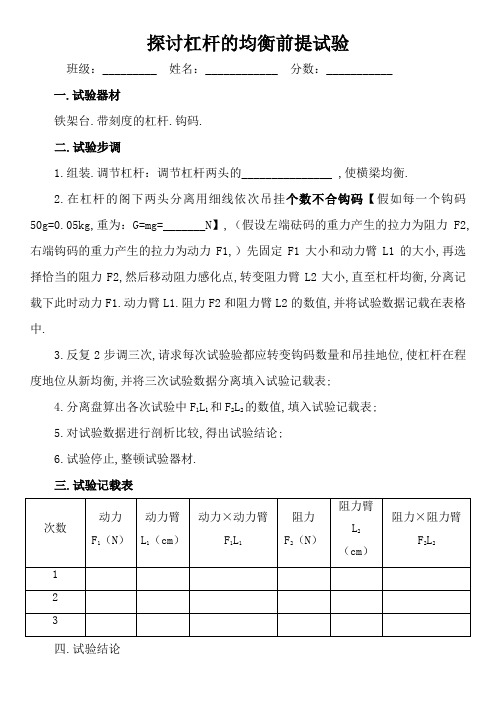
探讨杠杆的均衡前提试验
班级:_________ 姓名:____________ 分数:___________
一.试验器材
铁架台.带刻度的杠杆.钩码.
二.试验步调
1.组装.调节杠杆:调节杠杆两头的_______________ ,使横梁均衡.
2.在杠杆的阁下两头分离用细线依次吊挂个数不合钩码【假如每一个钩码50g=0.05kg,重为:G=mg=_______N】,(假设左端砝码的重力产生的拉力为阻力F2,右端钩码的重力产生的拉力为动力F1,)先固定F1大小和动力臂L1的大小,再选择恰当的阻力F2,然后移动阻力感化点,转变阻力臂L2大小,直至杠杆均衡,分离记载下此时动力F1.动力臂L1.阻力F2和阻力臂L2的数值,并将试验数据记载在表格中.
3.反复2步调三次,请求每次试验验都应转变钩码数量和吊挂地位,使杠杆在程度地位从新均衡,并将三次试验数据分离填入试验记载表;
4.分离盘算出各次试验中F1L1和F2L2的数值,填入试验记载表;
5.对试验数据进行剖析比较,得出试验结论;
6.试验停止,整顿试验器材.
三.试验记载表
四.试验结论
杠杆的均衡前提是:________。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
探究:杠杆的平衡条件
一、探究目的:通过实验了解杠杆的平衡条件
二、实验器材:杠杆、钩码盒一套、弹簧测力计、细线、刻度尺
三、探究假设:杠杆的平衡可能与“动力和力臂的乘积”、“阻力和阻力臂的乘积”有关。
四、实验步骤:
步骤1:调节杠杆两端的平衡螺母,使横梁平衡。
步骤2:在杠杆的左右两端分别用细线依次悬挂个数不同钩码【每一个钩码50g=,重为:G=mg=×10N/kg=】,(假设左端砝码的重力产生的拉力为阻力F2,右端钩码的重力产生的拉力为动力F1,)先固定F1大小和动力臂l1的大小,再选择适当的阻力F2,然后移动阻力作用点,改变阻力臂l 2大小,直至杠杆平衡,分别记录下此时动力F1、动力臂l1、阻力F2和阻力臂l 2的数值,并将实验数据记录在表格中。
步骤3:固定F1大小和动力臂l1的大小,改变阻力F2的大小,在移动阻力作用点,改变阻力臂l 2大小,直至杠杆平衡,记录下此时的阻力F2和阻力臂l 2的数值,并填入到实验记录表格中。
步骤4:改变动力F1的大小,保持动力臂l1的大小以及阻力F2大小不变,再改变阻力F2作用点,直至杠杆重新平衡,记录下此时动力F1大小和阻力臂l 2的大小,并填入到实验数据记录表。
步骤5:整理实验器材。
五、数据记录:实验数据记录表如下:
六、分析论证:根据实验记录数据,探究结论是:动力×动力臂=阻力×阻力臂
公式表示: F1L1=F2L2
思考:在上述探究实验中,为什么每次都要使杠杆在水平位置保持平衡
答:可以方便用刻度尺来直接测出实验中杠杆的力臂大小。