超声波传感器及其测距原理
测距传感器的原理是怎样的呢 传感器工作原理
测距传感器的原理是怎样的呢传感器工作原理超声波传感器是利用超声波的特性研制而成的传感器。
超声波是一种振动频率高于声波的机械波,由换能晶片在电压的激励下发生振动产生的;它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。
超声波测距原理超声波对液体、固体的穿透本领很大,尤其是在阳光不透亮的固体中,它可穿透几十米的深度。
超声波碰到杂质或分界面会产生显着反射形成反射成回波,碰到活动物体能产生多普勒效应。
因此超声波检测广泛应用在工业、国防、生物医学等方面以超声波作为检测手段,必需产生超声波和接收超声波。
完成这种功能的装置就是超声波传感器,习惯上称为超声换能器,或者超声探头。
激光测距传感器工作原理激光传感器工作时,先由激光对准目标发射激光脉冲。
经目标反射后激光向各方向散射。
部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。
雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号。
记录并处理从光脉冲发出到返回被接收所经过的时间,即可测定目标距离。
激光传感器必需极其精准明确地测定传输时间,由于光速太快。
红外线测距传感器工作原理红外测距传感器利用红外信号碰到障碍物距离的不同反射的强度也不同的原理,进行障碍物远近的检测。
红外测距传感器具有一对红外信号发射与接收二极管,发射管发射特定频率的红外信号,接收管接收这种频率的红外信号;当红外的检测方向碰到障碍物时,红外信号反射回来被接收管接收;经过处理之后,通过数字传感器接口返回到机器人主机,机器人即可利用红外的返回信号来识别四周环境的变化。
总结,上述的内容紧要是针对测距传感器的原理方面的学问讲解的;如超声波测距传感器原理、激光测距传感器工作原理及红外线测距传感器工作原理这三方面;关于“测距传感器的原理”的共享就先到这里了,希望上述介绍对大家的工作上有所帮忙。
全是干货:光电传感器工作原理和分类光电传感器是通过把光强度的变化转换成电信号的变化来实现掌控的。
超声波传感器测距原理
超声波传感器测距原理超声波传感器是一种常用的测距装置,它利用超声波在空气中的传播速度来测量距离。
超声波传感器主要由发射器、接收器和控制电路组成。
当发射器发出超声波脉冲时,这些超声波脉冲会在空气中传播,当遇到障碍物时会被反射回来,接收器接收到这些反射波并将其转换为电信号,控制电路再根据接收到的信号来计算出距离。
超声波传感器测距的原理主要是利用超声波在空气中的传播速度来计算出距离。
在空气中,超声波的传播速度大约为340m/s,因此可以通过测量超声波从发射到接收的时间来计算出距离。
当发射器发出超声波脉冲后,经过一段时间后接收器才能接收到反射回来的超声波,根据发射和接收的时间差,可以通过简单的计算得出距离。
超声波传感器测距的原理非常简单,但是在实际应用中需要考虑一些因素。
首先,超声波在空气中的传播速度会受到温度、湿度等环境因素的影响,因此在测距时需要对这些因素进行修正。
其次,超声波在传播过程中会受到障碍物的影响,如果遇到多个障碍物,可能会出现多次反射,这时需要对接收到的信号进行处理,以准确计算出距离。
除了以上因素外,超声波传感器测距还需要考虑到超声波的发射角度和接收角度。
发射器和接收器的位置和角度会影响到超声波的传播路径,因此需要对超声波的传播路径进行精确的控制,以确保测距的准确性。
总的来说,超声波传感器测距的原理是利用超声波在空气中的传播速度来计算出距离,通过测量超声波的发射和接收时间差来实现测距。
在实际应用中,需要考虑到环境因素、障碍物的影响以及发射接收角度等因素,以确保测距的准确性和稳定性。
超声波传感器在工业自动化、机器人、车辆等领域有着广泛的应用,其测距原理的稳定性和准确性对于实际应用具有重要意义。
超声波传感器测距原理

超声波传感器测距原理超声波测距原理是在超声波发射装置发出超声波,它的根据是接收器接到超声波时的时间差,与雷达测距原理相似。
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
(超声波在空气中的传播速度为340m/s,根据计时器记录的时间t(秒),就可以计算出发射点距障碍物的距离(s),即:s=340t/2)1、特点介绍超声波指向性强,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。
为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。
本文所介绍的三方向(前、左、右)超声波测距系统,就是为机器人了解其前方、左侧和右侧的环境而提供一个运动距离信息。
2、分类为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。
总体上讲,超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。
电气方式包括压电型、磁致伸缩型和电动型等;机械方式有加尔统笛、液哨和气流旋笛等。
它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。
较为常用的是压电式超声波发生器。
压电式超声波发生器实际上是利用压电晶体的谐振来工作的。
超声波发生器内部结构,它有两个压电晶片和一个共振板。
当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。
反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。
超声波测距工作原理
超声波测距工作原理超声波测距技术是一种常见的非接触式测量方法,通过发送超声波信号并测量其传播时间来实现距离的测量。
它在许多领域中得到广泛应用,如测距、障碍物检测以及无人驾驶等。
本文将介绍超声波测距的基本工作原理以及常用的超声波传感器。
一、超声波测距的原理超声波是一种高频声波,它的频率通常在20kHz到200kHz之间。
超声波测距利用声音在空气中传播的速度恒定不变的特性进行测量。
其基本原理可以概括为以下几个步骤:1. 发送超声波信号:超声波传感器会通过压电陶瓷元件或电磁换能器等将电能转换为声能,并向外发射超声波信号。
2. 超声波的传播:超声波信号在空气中传播,并遇到目标物体时会发生反射。
3. 接收反射信号:传感器会同时兼具发送和接收功能,它会接收到目标物体反射回来的超声波信号。
4. 测量传播时间:测量信号从发送到接收的时间差,通过将声音速度与时间乘积,可以得到距离。
二、超声波传感器类型超声波测距通常使用的传感器有两种类型:时差法和多普勒效应法。
1. 时差法传感器:时差法传感器是通过测量超声波信号的传播时间来计算距离的。
它通常由超声波发射器和接收器组成。
当超声波信号被目标物体反射后,接收器接收到信号并发送给计时器,计时器会记录下信号的传播时间。
然后,通过将传播时间乘以超声波在空气中的速度,可以得到目标物体与传感器之间的距离。
2. 多普勒效应法传感器:多普勒效应法传感器则是通过检测超声波信号的频率变化来计算距离的。
当超声波信号遇到流体或运动目标物体时,会发生频率的变化。
传感器通过测量这种频率变化,可以计算出目标物体与传感器之间的速度和距离。
三、应用领域超声波测距技术广泛应用于许多领域,主要包括以下几个方面:1. 工业领域:超声波测距被广泛用于工业自动化领域中的距离测量、液位测量、流量测量等。
它可以实现非接触式测量,同时也能够适应不同环境的复杂条件。
2. 车辆领域:超声波测距被应用于车辆防撞系统中,常见的倒车雷达就是使用超声波测距原理实现的。
实验12 超声波传感器测距

12、超声波测距
一、实验目的:
1、掌握超声波测距原理
2、掌握脉冲宽度测距函数pulseIn()
二、实验原理或参考资料:
1、超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射与接
收回波的时间差t,然后求出距离S=Ct/2,C为超声波波速。
由于超声波也是一种声波,其声速C与温度有关,图下图。
2、工作原理
(1)Arduino的数字引脚给超声波模块的Trig引脚至少10微秒的高电平信号,触发测距
功能
(2)触发测距功能后,模块会自动发送8个40khz的方波脉冲,自动检测是否有信号返回
(3)有信号返回,则Echo引脚会输出高电平,高电平持续的时间就是超声波从发射到返回的时间。
测距=(高电平时间x声速)/2
2、脉冲宽度测量函数PulseIn()
功能:检测指定引脚上的脉冲信号宽度。
语法:PulseIn(pin,value)
pin,需要读取脉冲的引脚。
Value,需要读取的脉冲类型,HIGH或LOW
3、
参考示例代码
三、实验结果
基础题:
1、搭建实验电路图,将以上Arduino的超声波测距程序烧录到arduino控制板中,使得能在串口输出传感器数据。
在每一行代码后面添加注释,将程序代码及串口输出截图。
提高篇:
1、完成以上基本练习的基础上,试增加一个报警功能(灯光报警),即超过设定的距离阈值即灯光报警。
程序代码及串口监视器截图。
超声波测距的应用原理

超声波测距的应用原理1. 介绍超声波测距是一种常见的测量距离的技术,广泛应用于工业自动化、智能家居、机器人等领域。
本文将介绍超声波测距的原理及其在实际应用中的一些案例。
2. 超声波测距原理超声波测距利用声波在空气中传播的特性进行测量。
其原理主要包括发射超声波脉冲、接收超声波反射信号以及计算测距距离三个步骤。
2.1 发射超声波脉冲超声波传感器会发射一个超声波脉冲信号,通常频率在20kHz到200kHz之间。
脉冲信号在空气中传播,并在目标物体上发生反射。
2.2 接收超声波反射信号当超声波脉冲信号被目标物体反射后,超声波传感器会接收到反射信号。
接收到的信号经过放大和滤波处理后,被转换成数字信号。
2.3 计算测距距离根据超声波传感器发送脉冲信号到接收到反射信号的时间间隔,可以计算出测距距离。
测距公式如下:距离 = (声速 × 时间间隔) / 2其中,声速通常使用常数值343m/s,时间间隔以秒为单位。
3. 超声波测距的应用案例3.1 工业自动化超声波测距广泛应用于工业自动化领域,例如在机器人的导航和避障中。
通过使用超声波传感器,机器人可以测量到周围的障碍物距离,从而做出相应的动作或路径调整。
3.2 智能家居超声波测距也被应用于智能家居系统中。
例如,在智能安防系统中,超声波传感器可以检测到入侵者的接近,并触发相应的报警系统。
此外,超声波测距还可以用于智能灯光系统中,自动调节灯光的亮度和发散角度。
3.3 车辆辅助系统超声波测距在车辆辅助系统中也得到了广泛应用。
例如,在倒车雷达系统中,超声波传感器可以探测到车辆后方的障碍物,提供给驾驶员倒车时的参考,并发出警告信号。
3.4 液位测量超声波测距还可以用于液位测量领域。
传感器发射超声波脉冲进入液体,当脉冲到达液体表面后会发生反射,传感器接收到反射信号后可以计算出液位的高度。
4. 总结超声波测距技术通过发射和接收超声波信号来测量目标物体的距离。
它在工业自动化、智能家居、车辆辅助系统以及液位测量等领域有着广泛的应用。
超声波传感器的工作原理
超声波传感器的工作原理超声波传感器是一种常用于非接触式测量过程中的无线传感器,能够通过探测超声波声音来计算出物体距离,而无需实体接触。
它能帮助改善过程的可靠性,让操作更加顺畅精准。
一、超声波传感器的原理超声波传感器会用高频声波代替光,来实现非接触测量的目的。
当发射源发出一轮超声波后,它会被反射回,接收者会将原先轮回发射出的超声波和反射回来的超声波进行比较,从而计算出物体距离。
具体而言,超声波传感器使用一个可编程晶体振荡器,该晶体振荡器可调节超声波的脉冲发生频率,从而发出一轮频率特定的超声波波束,然后将反射回的信号放到接收机中,最后进行数据处理,从而计算出物体距离。
二、超声波传感器的参数超声波传感器的参数包括:1、发射频率:用来控制超声波传播的频率,一般为5kHz~100kHz 。
2、脉冲质量:指发射超声波信号的各个脉冲之间的间隔时间,影响超声波测量精度。
3、发射功率:指发射时超声波传感器功率的强度,越强测量距离越长。
4、脉冲宽度:指一个MAV脉冲的宽度,影响超声波测量深度。
三、超声波传感器的应用超声波传感器可广泛应用于过程控制、物料及容积测量、贴标机构应用、液位检测等领域。
用于精准测量物体的距离及物体的速度、大小,可以更加精确的改善及优化过程控制。
1、过程控制:用于测量液位、位移、渗透率、流量、管道/管塞位置及厚度检测等方面,以维持及改善过程管理。
2、物料及容积测量:超声波传感器能够准确测量周围空间的容积及物料的量,实现自动化的计量、称重及检测物料静止的位置。
3、贴标机构应用:超声波传感器可用于贴标机构,可检测表面的厚度及可编程的检测面。
4、液位检测:可较准确的测量储藏柜及水箱的水位,控制设备的工作状态及数量汇报。
总之,超声波传感器是一种无线传感器,可用于测量距离、物料及容积、贴标机构及液位检测等,可提高及改善过程控制的可靠性,让操作更加顺畅精准。
超声波测距的原理

超声波测距的原理
超声波测距是一种常见的测距方法,它利用超声波在空气中传播的特性来测量物体与传感器之间的距离。
超声波是一种高频声波,其频率通常在20kHz到200kHz之间,这种声波在空气中传播速度快,能够穿透一定厚度的物体,因此被广泛应用于测距、检测和成像等领域。
超声波测距的原理是利用超声波在空气中传播的时间来计算物体与传感器之间的距离。
当超声波发射器发出超声波时,它会在空气中传播,当遇到物体时,一部分超声波会被反射回来,这些反射波会被接收器接收到。
通过测量超声波发射和接收的时间差,可以计算出物体与传感器之间的距离。
超声波测距的精度取决于超声波的频率和传播速度,以及传感器的精度和测量方法。
一般来说,超声波测距的精度可以达到几毫米到几厘米的范围,适用于许多工业和科学应用。
超声波测距广泛应用于工业自动化、机器人、汽车、航空航天等领域。
例如,在汽车中,超声波测距可以用于倒车雷达和自动泊车系统,帮助驾驶员更加安全地驾驶车辆。
在工业自动化中,超声波测距可以用于测量物体的位置和距离,控制机器人的运动和操作。
超声波测距是一种简单、可靠、精度高的测距方法,具有广泛的应用前景。
随着科技的不断发展,超声波测距技术将会得到更加广泛
的应用和发展。
超声波测距工作原理

超声波测距工作原理超声波测距技术是一种常见且有效的测距方法,广泛应用于各个领域,如工业控制、医疗诊断、安全监测等。
超声波测距的原理是利用声波在介质中传播的特性,通过测量声波的传播时间,计算得出被测物体与探测器的距离。
本文将详细介绍超声波测距的工作原理和应用。
一、超声波的产生和传播超声波是频率高于人类能听到范围(20kHz)的声波,常用的产生超声波的方法有压电效应和磁致伸缩效应。
通过施加电压或磁场,引发压电晶体或磁性材料的振动,产生超声波。
超声波在空气、液体或固体介质中传播时,具有频率高、传播速度快、穿透能力强的特点。
在传播过程中,超声波会遇到不同介质的界面,部分能量将被反射,部分能量将穿透进入下一个介质并继续传播,从而形成回波。
二、超声波测距的原理超声波测距的原理是基于声速与距离之间的关系,即在同一介质中,声波传播的时间与被测物体与传感器的距离成正比。
测量超声波的传播时间,即可计算出距离。
超声波测距一般采用脉冲回波法,即发射一个短脉冲超声波信号,当该信号遇到物体后被反射回传感器,传感器接收到回波信号后停止发射,并测量回波信号的传播时间。
根据信号的往返时间和声速,可以计算出被测物体与传感器之间的距离。
三、超声波测距的实现超声波测距通常需要以下几个关键组件:发射器、接收器、计时电路和信号处理电路。
发射器负责发射超声波信号,一般采用压电晶体作为声波发生器。
接收器用于接收回波信号,其构造与发射器类似,但是仅充当声波接受器。
计时电路用于测量信号的传播时间,一般采用定时器或计数器来实现。
信号处理电路用于计算距离,通常采用微处理器或专用的测距芯片。
当发射器发出超声波信号后,接收器开始等待回波信号。
一旦接收器接收到回波信号,计时电路开始计时,并停止发送信号。
接着,信号处理电路利用计时电路测得的时间和声速信息,计算出被测物体与传感器的距离,并输出测量结果。
四、超声波测距的应用超声波测距技术在工业、医疗、交通、安防等领域广泛应用。
超声波传感器的原理及应用
超声波传感器的原理及应用超声波传感器是一种能够利用超声波进行测距和检测的设备,具有高精度、非接触、响应快等特点。
其工作原理是利用声音在介质中传播的特性进行测量。
下面将详细介绍超声波传感器的工作原理和应用。
超声波传感器的工作原理可以分为三个步骤:发射超声波、接收超声波和信号处理。
首先,超声波传感器通过振荡器将电能转化为声能,发射超声波。
超声波在空气中以声波的形式传播,穿过空气中的介质直到遇到障碍物。
当超声波遇到障碍物时,一部分超声波会被反射回传感器,传感器的接收器接收到反射回来的超声波信号。
通过测量从发射到接收所需的时间,可以计算出超声波传播的路径长度。
最后,传感器将接收到的信号经过放大和滤波处理后,将距离信息通过电信号的形式输出。
超声波传感器具有广泛的应用领域。
其最常见的应用是测距。
超声波传感器可以测量与障碍物之间的距离,因此广泛应用于地图制作、机器人导航、自动驾驶等领域。
在这些应用中,超声波传感器可以帮助设备感知周围环境,并做出相应的决策。
例如,在自动驾驶领域,车辆通过超声波传感器可以检测到前方障碍物的距离,从而实现避障和自动刹车等功能。
此外,超声波传感器还可以应用于流量测量。
超声波传感器可以通过测量液体或气体中声波的传播速度,并结合管道的几何参数,计算出流体的流速。
这种应用广泛用于工业过程控制、石油化工、环境监测等领域。
另外,超声波传感器还可以应用于液位测量。
由于超声波的能量可以穿透液体,传感器可以通过测量从发射到接收的时间,计算出液体的液位高度。
这种应用广泛用于储罐、水池、井坑等液体容器的液位监测和控制。
另一个常见的应用是超声波传感器在夜视设备和安防系统中的应用。
超声波传感器可以通过检测被监控区域内的物体的运动,来实现警报和报警功能。
例如,当有人接近某个区域时,超声波传感器会发射超声波,如果检测到超声波的反射信号发生变化,那么系统会触发报警。
综上所述,超声波传感器是一种重要的测距和检测设备,其工作原理基于超声波在介质中传播的特性。
超声波传感器测量距离
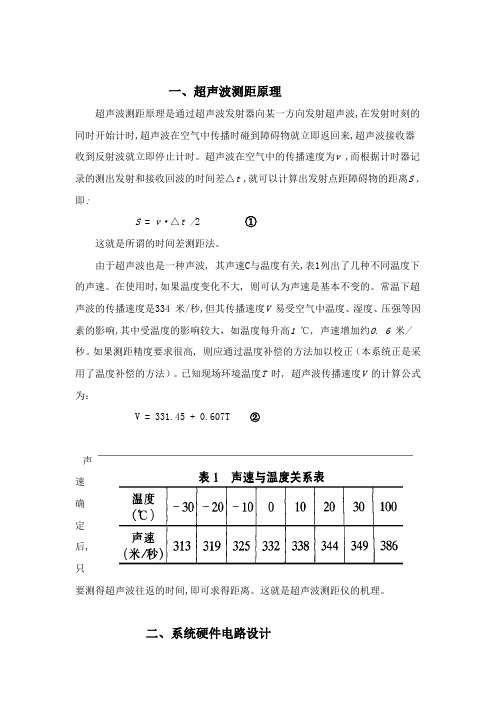
一、超声波测距原理超声波测距原理是通过超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播时碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为v ,而根据计时器记录的测出发射和接收回波的时间差△t ,就可以计算出发射点距障碍物的距离S ,即:S = v·△t /2 ①这就是所谓的时间差测距法。
由于超声波也是一种声波, 其声速C与温度有关,表1列出了几种不同温度下的声速。
在使用时,如果温度变化不大, 则可认为声速是基本不变的。
常温下超声波的传播速度是334 米/秒,但其传播速度V 易受空气中温度、湿度、压强等因素的影响,其中受温度的影响较大,如温度每升高1 ℃, 声速增加约0. 6 米/ 秒。
如果测距精度要求很高, 则应通过温度补偿的方法加以校正(本系统正是采用了温度补偿的方法)。
已知现场环境温度T 时, 超声波传播速度V 的计算公式为:V = 331.45 + 0.607T ②声速确定后,只要测得超声波往返的时间,即可求得距离。
这就是超声波测距仪的机理。
二、系统硬件电路设计图2 超声波测距仪系统框图基于单片机的超声波测距仪框图如图2所示。
该系统由单片机定时器产生40KHZ的频率信号、超声波传感器、接收处理电路和显示电路等构成。
单片机是整个系统的核心部件,它协调和控制各部分电路的工作。
工作过程:开机,单片机复位,然后控制程序使单片机输出载波为40kHz的10个脉冲信号加到超声波传感器上,使超声波发射器发射超声波。
当第一个超声波脉冲群发射结束后,单片机片内计数器开始计数,在检测到第一个回波脉冲的瞬间,计数器停止计数,这样就得到了从发射到接收的时间差△t;根据公式①、②计算出被测距离,由显示装置显示出来。
下面分别介绍各部分电路:1 、超声波发射电路超声波发射电路如图3所示,89C51通过外部引脚P1.0 输出脉冲宽度为250μs , 40kHz的10个脉冲串通过超声波驱动电路以推挽方式加到超声波传感器而发射出超声波。
测距传感器工作原理
测距传感器工作原理
测距传感器一般通过测量物体与传感器间的时间延迟或信号强度来确定距离。
以下是几种常见的测距传感器工作原理:
1. 超声波测距传感器:
超声波测距传感器通过发射超声波脉冲并接收其反射信号来测量物体到传感器的距离。
传感器首先发射一个短时的超声脉冲,当脉冲遇到物体并被反射回来后,传感器开始计时所花费的时间。
通过测量声波的传播时间,可以计算得出物体与传感器的距离。
2. 激光测距传感器:
激光测距传感器利用激光束的反射来确定物体与传感器之间的距离。
传感器向物体发射激光束,并用光电元件接收其反射信号。
通过测量激光脉冲的飞行时间或光电元件接收到激光的强度,可以计算出物体与传感器的距离。
3. 红外线测距传感器:
红外线测距传感器利用红外线光电元件(如红外线发射管和红外线接收器)来测量物体与传感器的距离。
传感器发射红外光,在光电元件接收到反射光后,通过测量接收到的光信号的强度或延迟时间来计算距离。
以上是几种常见的测距传感器工作原理,不同的传感器根据其原理的不同,适用于不同的应用领域和测距范围。
超声波传感器测距原理
超声波传感器测距原理超声波传感器是一种常见的测距设备,它利用声波的传播和反射原理来测量与目标物体的距离。
其工作原理基于声速在空气中的传播速度是已知且恒定的,并且声波在空气和其他介质之间的边界上发生反射时,反射声波的时间可以用来测量物体的距离。
超声波测距传感器包含一个发射器和一个接收器。
发射器发出一个超声波脉冲,该脉冲在空气中以声速传播,直到遇到一个物体。
如果物体是平的或较大且直接面对传感器,超声波会被完全反射,并由接收器接收。
反之,如果物体是小的或者其表面非平整,只有一部分声波被反射回来。
当接收器接收到反射的声波信号时,它会将信号转换为电信号,并计算从发射器到目标物体的往返时间。
根据声波的传播速度和往返时间,超声波传感器可以计算目标物体到传感器的距离。
具体而言,超声波传感器的测距原理如下:1.发射声波脉冲:超声波传感器发射一个短时间的声波脉冲,通常频率在20kHz到200kHz之间。
这个脉冲会沿着传感器的指定方向传播。
2.接收反射信号:当发射的超声波脉冲遇到一个物体时,它会被部分或完全反射回来。
接收器会接收到这个反射信号,并将其转换为电信号。
3.计算往返时间:通过记录发射和接收声波的时间差,可以计算出声波从发射器到物体再返回至接收器所需的时间。
4.计算距离:根据声波在空气中的传播速度和往返时间,可以利用以下公式计算出目标物体离传感器的距离:距离=速度×时间/2其中,速度为声波在空气中的传播速度,时间为声波的往返时间,除以2是因为声波的传播是双向的。
1.非接触式测距:超声波传感器可以在不接触物体的情况下进行测距,不会对目标物体造成损害。
2.高精度:由于声波的传播速度是已知且恒定的,超声波传感器有很高的精度,可以测量细小的距离变化。
3.宽范围:超声波传感器的测距范围通常在几厘米到几米之间,适用于不同尺寸的物体测距。
4.可靠性强:超声波传感器对目标物体的形状和表面特性并不敏感,能够在各种环境条件下正常工作。
超声波测距原理解读
超声波测距原理解读超声波测距技术是一种常见的非接触式测量方法,通过发射超声波并接收其反射信号来测量目标物体的距离。
本文将对超声波测距的原理进行解读。
一、超声波的发射与接收超声波是指频率高于20kHz的声波。
超声波测距一般采用压电式传感器进行发送与接收。
传感器通过施加电压使得压电晶体变形,进而产生超声波信号。
当超声波碰触到目标物体时,一部分能量将被反射回传感器,传感器再将接收到的信号转换为电信号进行处理。
二、超声波的传播与延时超声波在空气中的传播速度约为340m/s,该速度取决于空气中的密度和温度。
在测距过程中,测量仪器通过计算从发射到接收之间的时间延时,进而确定目标物体与测量仪器之间的距离。
三、测距原理解析超声波测距的原理基于超声波传播的时间差。
具体来说,测量仪器通过发送超声波信号,并记录下发射时刻。
当超声波遇到目标物体后被反射回传感器,传感器记录下接收到反射信号的时刻。
通过计算发射与接收的时间差,乘以超声波在空气中的传播速度,即可得到目标物体与测量仪器之间的距离。
超声波测距技术具有以下几个特点:1. 非接触式测量:超声波测距不需要与目标物体接触,避免了可能产生的物理损伤。
2. 高精度测量:超声波测距具有较高的测量精度,可以达到毫米级别。
3. 安全可靠:超声波属于无害的声波频率范围,不会对人体和物体造成损害。
4. 能够测量多种物体:超声波能够穿透大部分固体材料,对于金属、塑料、液体等各种材料都有良好的测量效果。
超声波测距技术被广泛应用于工业领域,包括物体检测、液位测量、距离校准等。
它在机器人导航、自动驾驶等领域也发挥重要作用。
总结起来,超声波测距技术通过发送和接收超声波信号,利用信号的传播时间差来测量目标物体与测量仪器之间的距离。
该技术具有高精度、非接触式测量和安全可靠等特点,已广泛应用于各个领域。
随着科技的不断进步,相信超声波测距技术将在未来发展出更多的应用和突破。
超声波传感器测距原理
超声波传感器测距原理
首先,超声波传感器通过发射超声波脉冲,并接收目标物体反射回来的超声波脉冲。
当超声波脉冲发射后,经过一定的时间后,接收到目标物体反射回来的超声波脉冲。
根据超声波在空气中的传播速度,可以通过测量发射和接收超声波脉冲之间的时间差来计算目标物体与传感器之间的距离。
其次,超声波在空气中的传播速度是一个已知的常数,一般情况下约为340m/s。
因此,通过测量超声波脉冲的往返时间,可以利用以下公式来计算目标物体与传感器之间的距离:
距离 = 传播速度× 时间差 / 2。
其中,时间差为发射超声波脉冲到接收目标物体反射回来的超声波脉冲的时间间隔,除以2是因为超声波脉冲是往返传播的,需要将时间差除以2才能得到单程的距离。
另外,超声波传感器测距原理还需要考虑到超声波在空气中传播的特性。
由于空气中存在温度、湿度等因素的影响,会对超声波的传播速度产生一定的影响。
因此,在实际应用中,需要对测得的
距离进行修正,以提高测距的准确性。
总的来说,超声波传感器测距原理是利用超声波在空气中的传播速度来计算目标物体与传感器之间的距离。
通过测量超声波脉冲的往返时间,并考虑到空气中的温度、湿度等因素的影响,可以实现精准的测距功能。
超声波传感器在工业自动化、智能车辆等领域有着广泛的应用,其测距原理的了解对于工程师和研发人员具有重要的意义。
超声波测距离原理
超声波测距离原理一、引言超声波测距技术是一种常用的非接触式测距方法,广泛应用于工业自动化、物流仓储、机器人导航等领域。
本文将介绍超声波测距的原理、应用及优缺点。
二、超声波测距原理超声波测距利用声波在空气中传播的特性进行测量。
其原理是利用超声波在待测物体和传感器之间的往返传播时间来计算距离。
1. 传感器发射超声波信号:传感器内部的震荡器产生超声波信号,通过发射器将信号转换为声波并发射出去。
2. 声波在空气中传播:发射出的声波在空气中传播,遇到物体时会发生反射。
3. 接收器接收反射信号:传感器的接收器接收到反射回来的声波信号。
4. 信号处理:接收到的信号经过放大、滤波等处理后,传递给控制系统进行计算。
5. 距离计算:利用声波传播速度恒定(约为343米/秒)的特性,通过测量声波往返时间,可以计算出待测物体与传感器之间的距离。
三、超声波测距应用超声波测距技术具有广泛的应用领域,以下列举几个常见的应用场景:1. 避障与导航:超声波传感器可以用于机器人、无人车等设备中,通过检测前方障碍物的距离,实现避障和导航功能。
2. 距离测量:超声波传感器可以用于测量物体与传感器之间的距离,例如自动门的开闭控制、物体的高度测量等。
3. 液位检测:超声波传感器可以用于测量液体的液位,例如水箱、油罐等的液位监测。
4. 清洁行业:超声波传感器可以应用于清洗设备中,通过检测物体表面与喷头的距离,实现自动调节喷水的功能。
四、超声波测距的优缺点超声波测距技术具有以下优点:1. 非接触式测量:超声波测距不需要与待测物体接触,避免了物体表面的磨损和污染。
2. 高精度:超声波测距技术可以实现较高的测量精度,一般可达到毫米级别。
3. 反应速度快:超声波传播速度快,可以在较短的时间内完成测量。
4. 适用性广:超声波测距技术适用于不同类型的物体,包括固体、液体等。
然而,超声波测距技术也存在一些缺点:1. 受环境影响:超声波传播受到温度、湿度等环境因素的影响,可能导致测量结果的误差。
超声波测距的原理
超声波测距的原理超声波测距是一种常见的测距方法,它利用超声波在空气中的传播速度来实现距离的测量。
超声波是一种机械波,它的频率高于人类能够听到的声音,通常在20kHz到200kHz之间。
超声波测距的原理基于超声波在空气中传播的速度是已知的,因此可以通过测量超声波的发送和接收时间来计算距离。
超声波测距的原理可以简单描述为,首先,超声波传感器发出一束超声波脉冲,然后等待超声波脉冲被目标物体反射并返回。
当超声波传感器接收到反射的超声波脉冲时,它会记录下发送和接收的时间差,并利用这个时间差来计算目标物体与传感器之间的距离。
在实际应用中,超声波传感器通常由发射器和接收器组成。
发射器负责发出超声波脉冲,而接收器则负责接收反射回来的超声波脉冲。
通过测量超声波脉冲的发送和接收时间差,可以利用已知的超声波在空气中的传播速度来计算目标物体与传感器之间的距离。
超声波在空气中的传播速度约为343米/秒,这个数值是在标准条件下的速度。
在实际应用中,由于空气密度、温度、湿度等因素的影响,超声波在空气中的传播速度可能会有所不同。
因此,在进行超声波测距时,需要对环境因素进行补偿,以确保测量结果的准确性。
除了测距外,超声波还可以用于测量目标物体的速度、检测目标物体的存在等应用。
在工业自动化、智能车辆、智能家居等领域,超声波传感器都发挥着重要作用。
总的来说,超声波测距的原理是利用超声波在空气中的传播速度来实现距离的测量。
通过测量超声波的发送和接收时间差,可以计算目标物体与传感器之间的距禿。
在实际应用中,需要考虑环境因素对超声波传播速度的影响,以确保测量结果的准确性。
超声波测距技术在自动化控制、智能感知等领域有着广泛的应用前景。
超声波测距的基本原理
超声波测距的基本原理超声波是一种频率高于人类听觉范围的机械波,其频率通常在20kHz到100kHz之间。
超声波的传播速度可以通过以下公式计算:v=fλ,其中v是传播速度,f是频率,λ是波长。
超声波测距一般采用脉冲回波测量原理。
测距设备会产生一个超声波脉冲信号,并将其发射至物体表面。
当超声波遇到物体表面时,部分能量会被物体表面反射回传感器。
传感器会接收到反射回来的超声波信号并记录下信号的往返时间。
通过测量回波时间,可以计算出超声波从传感器到物体表面的距离。
根据公式:距离=速度x时间,其中速度就是超声波在空气中的频率和波长决定的传播速度。
在测距设备中,通常采用的超声波传感器是由一个发射器和一个接收器组成的。
发射器会发出一个短暂的超声波脉冲信号,然后立即转换为接收模式,以接收反射回来的信号。
为了提高测量精度,超声波测距设备通常会采用多次测量并取平均值。
由于超声波在空气中的传播速度会受到温度、湿度和气压等因素的影响,为了准确测量距离,设备通常会同时测量环境的温度和湿度,并进行相应的修正。
另外,超声波在传播过程中会受到物体的吸收、散射和衍射等影响,从而导致信号衰减和干扰。
为了克服这些问题,通常会采用较高的频率和较短的波长,以及适当的波束角度。
超声波测距在实际应用中广泛使用,例如工业自动化控制中的距离测量、障碍物检测、无人驾驶车辆的避障、医学诊断等领域。
它具有非接触、高精度、响应速度快等优点,在一些特殊的环境和材质中,如液体、粉尘、烟雾等,它的测量效果尤为突出。
总之,超声波测距利用超声波在不同介质中传播速度不同的特点,通过发送和接收超声波信号来测量物体与传感器之间的距离。
通过测量超声波的回波时间,并结合环境的温度和湿度进行修正,可以精确测量物体的距离。
这种测距方式简便、有效,适用范围广泛,已经成为自动控制和测量领域中的重要技术手段。
超声波传感器及其测距原理
安全避障是移动机器人研究的一个基本问题。
障碍物与机器人之间距离的获得是研究安全避障的前提,超声波传感器以其信息处理简单、价格低廉、硬件容易实现等优点,被广泛用作测距传感器。
本超声波测距系统选用了SensComp公司生产的Polaroid 6500系列超声波距离模块和600系列传感器,微处理器采用了ATMEL公司的AT89C51。
本文对此超声波测距系统进行了详细的分析与介绍。
1、超声波传感器及其测距原理超声波是指频率高于20KHz的机械波[1]。
为了以超声波作为检测手段,必须产生超生波和接收超声波。
完成这种功能的装置就是超声波传感器,习惯上称为超声波换能器或超声波探头。
超声波传感器有发送器和接收器,但一个超声波传感器也可具有发送和接收声波的双重作用。
超声波传感器是利用压电效应[1]的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(time of flight)[2]。
首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离,即1、硬件电路设计我们设计的超声波测距系统由Polaroid 600系列传感器、Polaroid 6500系列超声波距离模块和AT89C51单片机构成。
2.1 Polaroid 600系列传感器此超声波传感器是集发送与接收一体的一种传感器。
传感器里面有一个圆形的薄片,薄片的材料是塑料,在其正面涂了一层金属薄膜,在其背面有一个铝制的后板。
薄片和后板构成了一个电容器,当给薄片加上频率为49.4kHz、电压为300VAC pk-pk的方波电压时,薄片以同样的频率震动,从而产生频率为49.4kHz的超声波。
当接收回波时,Polaroid 6500内有一个调谐电路,使得只有频率接近49.4kHz的信号才能被接收,而其它频率的信号则被过滤。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
安全避障是移动机器人研究的一个基本问题。
障碍物与机器人之间距离的获得是研究安全避障的前提,超声波传感器以其信息处理简单、价格低廉、硬件容易实现等优点,被广泛用作测距传感器。
本超声波测距系统选用了SensComp公司生产的Polaroid 6500系列超声波距离模块和600系列传感器,微处理器采用了ATMEL公司的AT89C51。
本文对此超声波测距系统进行了详细的分析与介绍。
1、超声波传感器及其测距原理超声波是指频率高于20KHz的机械波[1]。
为了以超声波作为检测手段,必须产生超生波和接收超声波。
完成这种功能的装置就是超声波传感器,习惯上称为超声波换能器或超声波探头。
超声波传感器有发送器和接收器,但一个超声波传感器也可具有发送和接收声波的双重作用。
超声波传感器是利用压电效应[1]的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(time of flight)[2]。
首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离,即1、硬件电路设计我们设计的超声波测距系统由Polaroid 600系列传感器、Polaroid 6500系列超声波距离模块和AT89C51单片机构成。
2.1 Polaroid 600系列传感器此超声波传感器是集发送与接收一体的一种传感器。
传感器里面有一个圆形的薄片,薄片的材料是塑料,在其正面涂了一层金属薄膜,在其背面有一个铝制的后板。
薄片和后板构成了一个电容器,当给薄片加上频率为49.4kHz、电压为300VAC pk-pk的方波电压时,薄片以同样的频率震动,从而产生频率为49.4kHz的超声波。
当接收回波时,Polaroid 6500内有一个调谐电路,使得只有频率接近49.4kHz的信号才能被接收,而其它频率的信号则被过滤。
Polaroid 600超声传感器发送的超声波具有角度为30度的波束角[3],如图1所示:图1 波束角超声波传感器既可以作为发射器又可以作为接收器,传感器用一段时间发射一串超声波束,只有待发送结束后才能启动接收,设发送波束的时间为D,则在D时间内从物体反射回的信号就无法捕捉;另外,超声波传感器有一定的惯性,发送结束后还留有一定的余振,这种余振经换能器同样产生电压信号,扰乱了系统捕捉返回信号的工作。
因此,在余振未消失以前,还不能启动系统进行回波接收,以上两个原因造成了超声传感器具有测量一定的测量范围。
此超声波最近可以测量37cm。
nbsp;2.2 Polaroid 6500系列超声波距离模块Polaroid 6500系列超声波距离模块的硬件电路如图2所示:图2 Polaroid 6500系列超声波距离模块的硬件电路TL851是一个经济的数字12步测距控制集成电路。
内部有一个420KHz的陶瓷晶振,6500系列超声波距离模块开始工作时,在发送的前16个周期,陶瓷晶振被8.5分频,形成49.4KHz的超声波信号,然后通过三极管Q1和变压器T1输送至超声波传感器。
发送之后陶瓷晶振被4.5分频,以供单片机定时用。
TL852是专门为接收超声波而设计的芯片。
因为返回的超声波信号比较微弱,需要进行放大才能被单片机接收,TL852主要提供了放大电路,当TL852接收到4个脉冲信号时,就通过REC给TL851发送高电平表明超声波已经接收。
2.3 AT89C51单片机本系统采用AT89C51来实现对Polaroid 600系列传感器和Polaroid 6500系列超声波距离模块的控制。
单片机通过P1.0引脚经反相器来控制超声波的发送,然后单片机不停的检测INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。
计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离。
超声波测距的硬件示意图如图3所示:图3 超声波测距的硬件示意图3、系统软件设计系统程序流程图如图4所示:图4超声波测距程序流程图工作时,微处理器AT89C51先把P1.0置0,启动超声波传感器发射超声波,同时启动内部定时器T0开始计时。
由于我们采用的超声波传感器是收发一体的,所以在发送完16个脉冲后超声波传感器还有余震,为了从返回信号识别消除超声波传感器的发送信号,要检测返回信号必须在启动发射信号后2.38ms才可以检测,这样低频400Hz 的HID全桥驱动模块是设计气体放电灯电源的简单方案,有HID全桥驱动模块的支持生产HID灯节能电子镇流器不再繁琐,电子制作网有了您的支持会为您提供更多的成品技术供您参考。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人的研制上也得到了广泛的应用。
为了使移动机器人能自动避障行走,就必须装备测距系统,以使其及时获取距障碍物的距离信息(距离和方向)。
本文所介绍的三方向(前、左、右)超声波测距系统,就是为机器人了解其前方、左侧和右侧的环境而提供一个运动距离信息。
二、超声波测距原理1、超声波发生器为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。
总体上讲,超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。
电气方式包括压电型、磁致伸缩型和电动型等;机械方式有加尔统笛、液哨和气流旋笛等。
它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。
目前较为常用的是压电式超声波发生器。
2、压电式超声波发生器原理压电式超声波发生器实际上是利用压电晶体的谐振来工作的。
超声波发生器内部结构如图1所示,它有两个压电晶片和一个共振板。
当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。
反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。
3、超声波测距原理超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。
超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2图2 超声波测距电路原理图本系统的特点是利用单片机控制超声波的发射和对超声波自发射至接收往返时间的计时,单片机选用8751,经济易用,且片内有4K的ROM,便于编程。
电路原理图如图2所示。
其中只画出前方测距电路的接线图,左侧和右侧测距电路与前方测距电路相同,故省略之。
1、40kHz 脉冲的产生与超声波发射测距系统中的超声波传感器采用UCM40的压电陶瓷传感器,它的工作电压是40kHz的脉冲信号,这由单片机执行下面程序来产生。
puzel: mov 14h, #12h;超声波发射持续200mshere: cpl p1.0 ;输出40kHz方波nop ;nop ;nop ;djnz 14h,here;ret前方测距电路的输入端接单片机P1.0端口,单片机执行上面的程序后,在P1.0 端口输出一个40kHz的脉冲信号,经过三极管T放大,驱动超声波发射头UCM40T,发出40kHz的脉冲超声波,且持续发射200ms。
右侧和左侧测距电路的输入端分别接P1.1和P1.2端口,工作原理与前方测距电路相同。
2、超声波的接收与处理接收头采用与发射头配对的UCM40R,将超声波调制脉冲变为交变电压信号,经运算放大器IC1A和IC1B两极放大后加至IC2。
IC2是带有锁定环的音频译码集成块LM567,内部的压控振荡器的中心频率f0=1/1.1R8C3,电容C4决定其锁定带宽。
调节R8在发射的载频上,则LM567输入信号大于25mV,输出端8脚由高电平跃变为低电平,作为中断请求信号,送至单片机处理。
前方测距电路的输出端接单片机INT0端口,中断优先级最高,左、右测距电路的输出通过与门IC3A的输出接单片机INT1端口,同时单片机P1.3和P1.4接到IC3A的输入端,中断源的识别由程序查询来处理,中断优先级为先右后左。
部分源程序如下:receive1:push pswpush accclr ex1 ;关外部中断1jnb p1.1, right ;P1.1引脚为0,转至右测距电路中断服务程序jnb p1.2, left ;P1.2引脚为0,转至左测距电路中断服务程序return:SETB EX1;开外部中断1pop? accpop? pswretiright: ...? ;右测距电路中断服务程序入口? ajmp? returnleft:... ;左测距电路中断服务程序入口? ajmp? return3、计算超声波传播时间在启动发射电路的同时启动单片机内部的定时器T0,利用定时器的计数功能记录超声波发射的时间和收到反射波的时间。
当收到超声波反射波时,接收电路输出端产生一个负跳变,在INT0或INT1端产生一个中断请求信号,单片机响应外部中断请求,执行外部中断服务子程序,读取时间差,计算距离。
其部分源程序如下:RECEIVE0:PUSH PSWPUSH ACCCLR EX0 ;关外部中断0? MOV R7, TH0 ;读取时间值MOV R6, TL0?CLR CMOV A, R6SUBB A, #0BBH;计算时间差MOV 31H, A ;存储结果MOV A, R7SUBB A, #3CHMOV 30H, A?SETB EX0 ;开外部中断0POP ACC?POP PSWRETI四、超声波测距系统的软件设计软件分为两部分,主程序和中断服务程序,如图3(a)(b)(c) 所示。
主程序完成初始化工作、各路超声波发射和接收顺序的控制。
定时中断服务子程序完成三方向超声波的轮流发射,外部中断服务子程序主要完成时间值的读取、距离计算、结果的输出等工作。