MATLAB程序 惩罚函数法 内点法
惩罚函数法

k k 1
r k 1 cr k
否
X 0 X *(rk )
开始
输入 X 0、r0、c、
k←0
求 min(X , rk )
满足收敛条件? 是
X * X *(rk ) f ( X *) f X *(rk )
结束
3.外点惩罚函数法
求解策略
外点惩罚函数法简称外点法。这种方法和内点相反,
3.外点惩罚函数法
外点法程序框图:
Yes
X * X *(rk )
Yes
f ( X *) f X *(rk )
结束
开始
输入 X 0, r0, c,1,2
k 0
求 min ( X , rk ) 得X *(rk )
Q max g j ( X *(rk ))
Q 1 ?
No
X * (r k ) X * (r k1) 2
(X , r) f (X ) rmax 0, g j (X ) rhk (X )
j 1
k 1
式中:r为惩罚因子,它是由小到大,且趋近于∞的数列
3.外点惩罚函数法
l
2m
2
即 r0<r1<r2<··· ,hk (X ) 、max 0, g j (X )分别对
应为对应于不等式约束和等k式1 约束函数j1的惩罚项, 其中
当 r , lim(1 1 ) 1。
r 4r
当逐步增大r值,直至趋近于无穷时,逼近原问题的约束最优
解,当r=0.25,0.5,1,2时,惩罚函数 (X , r) 的等值线图
下如
3.外点惩罚函数法
当r逐渐增大时,极值
点 X *(r)的序列将沿一直线轨 迹 ( X *(r), r) 1 X *(r) 在可 行域外逐步逼近2 最优2 点。
优化设计5惩罚函数法
目前,人们对无约束问题的最优化方法要比对约束优化方法研 究的更为深入和成熟,并且形成了有效的、可靠的解法。因 此,在求解约束化问题时,自然会想到是否可以利用某种方法 将约束优化问题转化为无约束最优化问题来解决,显然这种转化 必须在一定的前提条件下进行。一方面这种转化不能破坏原约 束问题的约束条件;另一方面还必须使它归结到原约束优化问 题的同一最优解上去。这种将约束优化问题转化成无约束化问 题,然后用无约束最优化方法进行求优的途径就是约束优化问 题求优的间接解.
4
内点惩罚函数法
内点惩罚函数法的基本原理
内点惩罚函数法(简称内点法)将新目标函数定义在可行城内.这样 它的初始点以及后面产生的迭代点序列也必在可行城内,它是求解 不等式约束优化问题的一种十分有效的方法。下面我们选用一个简 单的例子来说明内点法的一些几何概念和基本原理。 设数学模型为:
min F(x) x X D R1 D: g(X) x 1 0 用内点法来求解此约束问题先构造泛函,取
适用于不等式约束函数比较简单的情况
然后构造罚函数,并求无约束极小值
5
代替计算机无约束搜索求优,惩罚函数无约束最优点序列
6
7
8
9
可以看出内点惩罚函数法就是以不同的加权参数(罚因子)来构造一 序列无约束的新目标函数,求这一序列惩罚函数法的无约束极值 点 X • (r(k) ) ,使它逐渐逼近原约束问题的最优解,而不论原约束问题 最优解在可行域内还是在可行域的边界上,其整个搜索过程都在约束 区域内进行。
k 0
r(ห้องสมุดไป่ตู้) 1
u1
G[gu(X)]
0
的满足要求。
12
13
采用内点法应注意几个问题
使用Matlab进行多目标优化和约束优化
使用Matlab进行多目标优化和约束优化引言:多目标优化和约束优化是现代科学和工程领域中的重要问题。
在很多实际应用中,我们常常面对的是多个目标参数之间存在冲突的情况,同时还需要满足一定的约束条件。
这就需要我们采用适当的方法和工具进行多目标优化和约束优化。
本文将介绍如何使用Matlab进行多目标优化和约束优化。
一、多目标优化多目标优化是指在优化问题中存在多个目标函数,我们的目标是同时优化这些目标函数。
在Matlab中,可以使用多种方法进行多目标优化,其中常用的方法包括遗传算法、粒子群算法和模拟退火等。
1.1 遗传算法遗传算法是一种模拟生物进化过程的优化算法。
它模拟了遗传的过程,通过交叉、变异和选择等操作,利用群体中不断进化的个体来搜索最优解。
在多目标优化中,遗传算法常用于生成一组非支配解,即没有解能同时优于其他解的情况。
Matlab中提供了相关的工具箱,如Global Optimization Toolbox和Multiobjective Optimization Toolbox,可以方便地进行多目标优化。
1.2 粒子群算法粒子群算法是一种基于群体行为的优化算法。
它通过模拟鸟群或鱼群等群体的行为,寻找最优解。
在多目标优化中,粒子群算法也可以生成一组非支配解。
Matlab中的Particle Swarm Optimization Toolbox提供了相关函数和工具,可以实现多目标优化。
1.3 模拟退火模拟退火是一种模拟金属冶炼过程的优化算法。
它通过模拟金属在高温下退火的过程,通过温度控制来逃离局部最优解,最终达到全局最优解。
在多目标优化中,模拟退火算法可以通过调整温度参数来生成一组非支配解。
Matlab中也提供了相关的函数和工具,可以进行多目标优化。
二、约束优化约束优化是指在优化问题中存在一定的约束条件,我们的目标是在满足这些约束条件的前提下,使目标函数达到最优。
在Matlab中,也有多种方法可以进行约束优化,其中常用的方法包括罚函数法、惩罚函数法和内点法等。
一、惩罚函数法(SUMT)

(4)应注意的问题
(a) 在step2中,可用无约束优化问题的算法求解
min
x R n
k
(
x
)
f ( x ) k p( x )
(b) 在实际计算中,判断x* (k ) D 用 g j ( x* (k )) ( j 1,2,, m)或 k p( x) .
(c)
k 1 k
x
)
算法步骤相同
(8) 算法收敛性:
f(x ) f(x )
k 1
k
p(x ) p(x )
k 1
k
k(1 x ) (k x )
k 1
k
结论 1. 若点列{ x } 是由外点法产生的,则有 k
列 { x }的任何极限点一定是所求问题的极小点。 k
都是 R 上的连续函数,则由外点法产生的点 n
解:构造增广函数k ( x)如下: k ( x) (x 1)2 k min2{ x 2,0}
( x 1)2
(x 1)2 k ( x 2)2
if x 2 if x 2
dk (
dx
x)
(2 x 1)
(2 x 1)
2k
(
x
因子的缩小系数), k : k 1,转 step 2。
(4) 例子:试用内点法(内部惩罚函数法)求解如下优化问题 min f ( x) 1 x3 3 s.t. x 1 0
解:构造增广函数 k ( x)如下:
k(x)
x3
k
1 x1
由
d k ( x)
dx
x2
k
(2)q( x) if x D
混合惩罚函数法5

查找原因,数学模型是否有误,选择其它优 化方法重新计算. 3)优化结果是否合理:
优化所得的结果一般只能认为是局部最优 解,并一定是全局最优解,处理方法:一是选几个 初始点进行试计算或选用不同的优化方法进行 试计算,从所得各个最优解中筛选出最佳的结果 作为最优解,这时虽然还不能确定为全局最优解, 但能肯定是几个局部最优解最佳的结果. 4)设计变量的处理:
初始点x 惩罚因子初始值 r ( 0 )均可参考内点 法选取。 计算步骤及程序框图与内点法相近。 混合罚函数综合了内外罚函数法的特点及长 处,因而应用非常广泛。 (1)先在可行域内选择一个严格满足所有不等
(0)
式约束的初始点 x 选择适当的惩罚因子初始值
0
r ,通常可取 r ( 0 ) =1
功效函数法适用于: 目标函数既不是愈大愈好,也不是愈小愈好 的情况. 此法将一多目标函数最优化问题中的全 部q个目标分为: 目标函数愈小愈好的所谓基用类(材料,工时,成 本,重量等) 目标函数值愈大愈好的所谓效益类(产量,产值, 利润,效益等) 则:统一目标函数可取
f
j 1 q j s 1
st . g j ( x) 0
( j 1,
2 m)
此解,即为多目标问题的最优解
关键是:确定加权因子,如何选择这些加数 因子是一个比较复杂的问题,至今在理论 上尚未得到完善的解决.加权因子由设计 者选定。
②目标规划法:
基本思想:先求出各分目标函数的最优值
*
f j (x )
根据多 目标优化设计的总体要求
*
g u x
2
m (k )
f (x ,
r
(k )
(完整版)MATLAB常用函数大全

(完整版)MATLAB常用函数大全一、MATLAB常用的基本数学函数abs(x):纯量的绝对值或向量的长度angle(z):复数z的相角(Phase angle)sqrt(x):开平方real(z):复数z的实部imag(z):复数z的虚部conj(z):复数z的共轭复数round(x):四舍五入至最近整数fix(x):无论正负,舍去小数至最近整数floor(x):地板函数,即舍去正小数至最近整数ceil(x):天花板函数,即加入正小数至最近整数rat(x):将实数x化为分数表示rats(x):将实数x化为多项分数展开sign(x):符号函数(Signum function)。
当x<0时,sign(x)=-1;当x=0时,sign(x)=0;当x>0时,sign(x)=1。
rem(x,y):求x除以y的馀数gcd(x,y):整数x和y的最大公因数lcm(x,y):整数x和y的最小公倍数exp(x):自然指数pow2(x):2的指数log(x):以e为底的对数,即自然对数或log2(x):以2为底的对数log10(x):以10为底的对数二、MATLAB常用的三角函数sin(x):正弦函数cos(x):余弦函数tan(x):正切函数asin(x):反正弦函数acos(x):反馀弦函数atan(x):反正切函数atan2(x,y):四象限的反正切函数sinh(x):超越正弦函数cosh(x):超越馀弦函数tanh(x):超越正切函数asinh(x):反超越正弦函数acosh(x):反超越馀弦函数atanh(x):反超越正切函数三、适用於向量的常用函数有:min(x): 向量x的元素的最小值max(x): 向量x的元素的最大值mean(x): 向量x的元素的平均值median(x): 向量x的元素的中位数std(x): 向量x的元素的标准差diff(x): 向量x的相邻元素的差sort(x): 对向量x的元素进行排序(Sorting)length(x): 向量x的元素个数norm(x): 向量x的欧氏(Euclidean)长度sum(x): 向量x的元素总和prod(x): 向量x的元素总乘积cumsum(x): 向量x的累计元素总和cumprod(x): 向量x的累计元素总乘积dot(x, y): 向量x和y的内积cross(x, y): 向量x和y的外积四、MATLAB的永久常数i或j:基本虚数单位(即)eps:系统的浮点(Floating-point)精确度inf:无限大,例如1/0nan或NaN:非数值(Not a number),例如0/0 pi:圆周率p(= 3.1415926...)realmax:系统所能表示的最大数值realmin:系统所能表示的最小数值nargin: 函数的输入引数个数nargout: 函数的输出引数个数五、MATLAB基本绘图函数plot: x轴和y轴均为线性刻度(Linear scale)loglog: x轴和y轴均为对数刻度(Logarithmic scale)semilogx: x轴为对数刻度,y轴为线性刻度semilogy: x轴为线性刻度,y轴为对数刻度六、plot绘图函数的叁数字元颜色字元图线型态y 黄色 . 点k 黑色o 圆w 白色x xb 蓝色+ +g 绿色* *r 红色- 实线c 亮青色: 点线m 锰紫色-. 点虚线-- 虚线七、注解xlabel('Input Value'); % x轴注解ylabel('Function Value'); % y轴注解title('Two Trigonometric Functions'); % 图形标题legend('y = sin(x)','y = cos(x)'); % 图形注解grid on; % 显示格线八、二维绘图函数bar 长条图errorbar 图形加上误差范围fplot 较精确的函数图形polar 极座标图hist 累计图rose 极座标累计图stairs 阶梯图stem 针状图fill 实心图feather 羽毛图compass 罗盘图quiver 向量场图1、特殊变量与常数ans 计算结果的变量名computer 确定运行的计算机eps 浮点相对精度Inf 无穷大I 虚数单位inputname 输入参数名NaN 非数nargin 输入参数个数nargout 输出参数的数目pi 圆周率nargoutchk 有效的输出参数数目realmax 最大正浮点数realmin 最小正浮点数varargin 实际输入的参量varargout 实际返回的参量操作符与特殊字符+ 加- 减* 矩阵乘法 .* 数组乘(对应元素相乘)^ 矩阵幂 .^ 数组幂(各个元素求幂)\ 左除或反斜杠/ 右除或斜面杠./ 数组除(对应元素除)kron Kronecker张量积: 冒号() 圆括[] 方括 . 小数点.. 父目录 ... 继续, 逗号(分割多条命令); 分号(禁止结果显示)% 注释! 感叹号' 转置或引用= 赋值== 相等<> 不等于& 逻辑与| 逻辑或~ 逻辑非xor 逻辑异或2、基本数学函数abs 绝对值和复数模长acos,acodh 反余弦,反双曲余弦acot,acoth 反余切,反双曲余切acsc,acsch 反余割,反双曲余割angle 相角asec,asech 反正割,反双曲正割asin,asinh 反正弦,反双曲正弦atan,atanh 反正切,双曲正切tangent 正切atan2 四象限反正切ceil 向着无穷大舍入complex 建立一个复数conj 复数配对cos,cosh 余弦,双曲余弦csc,csch 余切,双曲余切cot,coth 余切,双曲余切exp 指数fix 朝0方向取整floor 朝负无穷取整gcd 最大公因数imag 复数值的虚部lcm 最小公倍数log 自然对数log2 以2为底的对数log10 常用对数mod 有符号的求余nchoosek 二项式系数和全部组合数real 复数的实部rem 相除后求余round 取整为最近的整数sec,sech 正割,双曲正割sign 符号数sin,sinh 正弦,双曲正弦tan,tanh 正切,双曲正切3、基本矩阵和矩阵操作blkding 从输入参量建立块对角矩阵eye 单位矩阵linespace 产生线性间隔的向量logspace 产生对数间隔的向量numel 元素个数ones 产生全为1的数组rand 均匀颁随机数和数组randn 正态分布随机数和数组zeros 建立一个全0矩阵colon) 等间隔向量cat 连接数组diag 对角矩阵和矩阵对角线fliplr 从左自右翻转矩阵flipud 从上到下翻转矩阵repmat 复制一个数组reshape 改造矩阵roy90 矩阵翻转90度tril 矩阵的下三角triu 矩阵的上三角dot 向量点集cross 向量叉集ismember 检测一个集合的元素intersect 向量的交集setxor 向量异或集setdiff 向是的差集union 向量的并集数值分析和傅立叶变换cumprod 累积cumsum 累加cumtrapz 累计梯形法计算数值微分factor 质因子inpolygon 删除多边形区域内的点max 最大值mean 数组的均值mediam 中值min 最小值perms 所有可能的转换polyarea 多边形区域primes 生成质数列表prod 数组元素的乘积rectint 矩形交集区域sort 按升序排列矩阵元素sortrows 按升序排列行std 标准偏差sum 求和trapz 梯形数值积分var 方差del2 离散拉普拉斯diff 差值和微分估计gradient 数值梯度cov 协方差矩阵corrcoef 相关系数conv2 二维卷积conv 卷积和多项式乘法filter IIR或FIR滤波器deconv 反卷积和多项式除法filter2 二维数字滤波器cplxpair 将复数值分类为共轭对fft 一维的快速傅立叶变换fft2 二维快速傅立叶变换fftshift 将FFT的DC分量移到频谱中心ifft 一维快速反傅立叶变换ifft2 二维傅立叶反变换ifftn 多维快速傅立叶变换ifftshift 反FFT偏移nextpow2 最靠近的2的幂次unwrap 校正相位角多项式与插值conv 卷积和多项式乘法roots 多项式的根poly 具有设定根的多项式polyder 多项式微分polyeig 多项式的特征根polyfit 多项式拟合polyint 解析多项式积分polyval 多项式求值polyvalm 矩阵变量多项式求值residue 部分分式展开interp1 一维插值interp2 二维插值interp3 三维插值interpft 使用FFT的一维插值interpn 多维插值meshgrid 为3维点生成x和y的网格ndgrid 生成多维函数和插值的数组pchip 分段3次Hermite插值多项式ppval 分段多项式的值spline 3次样条数据插值绘图函数bar 竖直条图barh 水平条图hist 直方图histc 直方图计数hold 保持当前图形loglog x,y对数坐标图pie 饼状图plot 绘二维图polar 极坐标图semilogy y轴对数坐标图semilogx x轴对数坐标subplot 绘制子图bar3 数值3D竖条图bar3h 水平3D条形图comet3 3D慧星图cylinder 圆柱体fill3 填充的3D多边形plot3 3维空间绘图quiver3 3D震动(速度)图slice 体积薄片图sphere 球stem3 绘制离散表面数据waterfall 绘制瀑布trisurf 三角表面clabel 增加轮廓标签到等高线图中datetick 数据格式标记grid 加网格线gtext 用鼠标将文本放在2D图中legend 图注plotyy 左右边都绘Y轴title 标题xlabel X轴标签ylabel Y轴标签zlabel Z轴标签contour 等高线图contourc 等高线计算contourf 填充的等高线图hidden 网格线消影meshc 连接网格/等高线mesh 具有参考轴的3D网格peaks 具有两个变量的采样函数surf 3D阴影表面图surface 建立表面低层对象surfc 海浪和等高线的结合surfl 具有光照的3D阴影表面trimesh 三角网格图Matlab函数大全信源函数randerr 产生比特误差样本randint 产生均匀分布的随机整数矩阵randsrc 根据给定的数字表产生随机矩阵wgn 产生高斯白噪声信号分析函数biterr 计算比特误差数和比特误差率eyediagram 绘制眼图scatterplot 绘制分布图symerr 计算符号误差数和符号误差率信源编码compand mu律/A律压缩/扩张dpcmdeco DPCM(差分脉冲编码调制)解码dpcmenco DPCM 编码dpcmopt 优化DPCM参数lloyds Lloyd法则优化量化器参数quantiz 给出量化后的级和输出值误差控制编码bchpoly 给出二进制BCH码的性能参数和产生多项式convenc 产生卷积码cyclgen 产生循环码的奇偶校验阵和生成矩阵cyclpoly 产生循环码的生成多项式decode 分组码解码器encode 分组码编码器gen2par 将奇偶校验阵和生成矩阵互相转换gfweight 计算线性分组码的最小距离hammgen 产生汉明码的奇偶校验阵和生成矩阵rsdecof 对Reed-Solomon编码的ASCII文件解码rsencof 用Reed-Solomon码对ASCII文件编码rspoly 给出Reed-Solomon码的生成多项式syndtable 产生伴随解码表vitdec 用Viterbi法则解卷积码(误差控制编码的低级函数)bchdeco BCH解码器bchenco BCH编码器rsdeco Reed-Solomon解码器rsdecode 用指数形式进行Reed-Solomon解码rsenco Reed-Solomon编码器rsencode 用指数形式进行Reed-Solomon编码调制与解调ademod 模拟通带解调器ademodce 模拟基带解调器amod 模拟通带调制器amodce 模拟基带调制器apkconst 绘制圆形的复合ASK-PSK星座图ddemod 数字通带解调器ddemodce 数字基带解调器demodmap 解调后的模拟信号星座图反映射到数字信号dmod 数字通带调制器dmodce 数字基带调制器modmap 把数字信号映射到模拟信号星座图(以供调制)qaskdeco 从方形的QASK星座图反映射到数字信号qaskenco 把数字信号映射到方形的QASK星座图专用滤波器hank2sys 把一个Hankel矩阵转换成一个线性系统模型hilbiir 设计一个希尔伯特变换IIR滤波器rcosflt 升余弦滤波器rcosine 设计一个升余弦滤波器(专用滤波器的低级函数)rcosfir 设计一个升余弦FIR滤波器rcosiir 设计一个升余弦IIR滤波器信道函数awgn 添加高斯白噪声伽罗域计算gfadd 伽罗域上的多项式加法gfconv 伽罗域上的多项式乘法gfcosets 生成伽罗域的分圆陪集gfdeconv 伽罗域上的多项式除法gfdiv 伽罗域上的元素除法gffilter 在质伽罗域上用多项式过滤数据gflineq 在至伽罗域上求Ax=b的一个特解gfminpol 求伽罗域上元素的最小多项式gfmul 伽罗域上的元素乘法gfplus GF(2^m)上的元素加法gfpretty 以通常方式显示多项式gfprimck 检测多项式是否是基本多项式gfprimdf 给出伽罗域的MATLAB默认的基本多项式gfprimfd 给出伽罗域的基本多项式gfrank 伽罗域上矩阵求秩gfrepcov GF(2)上多项式的表达方式转换gfroots 质伽罗域上的多项式求根gfsub 伽罗域上的多项式减法gftrunc 使多项式的表达最简化gftuple 简化或转换伽罗域上元素的形式工具函数bi2de 把二进制向量转换成十进制数de2bi 把十进制数转换成二进制向量erf 误差函数erfc 余误差函数istrellis 检测输入是否MATLAB的trellis结构(structure)marcumq 通用Marcum Q 函数oct2dec 八进制数转十进制数poly2trellis 把卷积码多项式转换成MATLAB的trellis描述vec2mat 把向量转换成矩阵——————————————————————————————————————————————————A aabs 绝对值、模、字符的ASCII码值acos 反余弦acosh 反双曲余弦acot 反余切acoth 反双曲余切acsc 反余割acsch 反双曲余割align 启动图形对象几何位置排列工具all 所有元素非零为真angle 相角ans 表达式计算结果的缺省变量名any 所有元素非全零为真area 面域图argnames 函数M文件宗量名asec 反正割asech 反双曲正割asin 反正弦asinh 反双曲正弦assignin 向变量赋值atan 反正切atan2四象限反正切atanh 反双曲正切autumn 红黄调秋色图阵axes 创建轴对象的低层指令axis 控制轴刻度和风格的高层指令B bbar 二维直方图bar3 三维直方图bar3h 三维水平直方图barh 二维水平直方图base2dec X进制转换为十进制bin2dec 二进制转换为十进制blanks 创建空格串bone 蓝色调黑白色图阵box 框状坐标轴break while 或for 环中断指令brighten 亮度控制C ccapture (3版以前)捕获当前图形cart2pol 直角坐标变为极或柱坐标cart2sph 直角坐标变为球坐标cat 串接成高维数组caxis 色标尺刻度cd 指定当前目录cdedit 启动用户菜单、控件回调函数设计工具cdf2rdf 复数特征值对角阵转为实数块对角阵ceil 向正无穷取整cell 创建元胞数组cell2struct 元胞数组转换为构架数组celldisp 显示元胞数组内容cellplot 元胞数组内部结构图示char 把数值、符号、内联类转换为字符对象chi2cdf 分布累计概率函数chi2inv 分布逆累计概率函数chi2pdf 分布概率密度函数chi2rnd 分布随机数发生器chol Cholesky分解clabel 等位线标识cla 清除当前轴class 获知对象类别或创建对象clc 清除指令窗clear 清除内存变量和函数clf 清除图对象clock 时钟colorcube 三浓淡多彩交叉色图矩阵colordef 设置色彩缺省值colormap 色图colspace 列空间的基close 关闭指定窗口colperm 列排序置换向量comet 彗星状轨迹图comet3 三维彗星轨迹图compass 射线图compose 求复合函数cond (逆)条件数condeig 计算特征值、特征向量同时给出条件数condest 范-1条件数估计conj 复数共轭contour 等位线contourf 填色等位线contour3 三维等位线contourslice 四维切片等位线图conv 多项式乘、卷积cool 青紫调冷色图copper 古铜调色图cos 余弦cosh 双曲余弦cot 余切coth 双曲余切cplxpair 复数共轭成对排列csc 余割csch 双曲余割cumsum 元素累计和cumtrapz 累计梯形积分cylinder 创建圆柱D ddblquad 二重数值积分deal 分配宗量deblank 删去串尾部的空格符dec2base 十进制转换为X进制dec2bin十进制转换为二进制dec2hex 十进制转换为十六进制deconv 多项式除、解卷delaunay Delaunay 三角剖分del2 离散Laplacian差分demo Matlab演示det 行列式diag 矩阵对角元素提取、创建对角阵diary Matlab指令窗文本内容记录diff 数值差分、符号微分digits 符号计算中设置符号数值的精度dir 目录列表disp 显示数组display 显示对象内容的重载函数dlinmod 离散系统的线性化模型dmperm 矩阵Dulmage-Mendelsohn 分解dos 执行DOS 指令并返回结果double 把其他类型对象转换为双精度数值drawnow 更新事件队列强迫Matlab刷新屏幕dsolve 符号计算解微分方程E eecho M文件被执行指令的显示edit 启动M文件编辑器eig 求特征值和特征向量eigs 求指定的几个特征值end 控制流FOR等结构体的结尾元素下标eps 浮点相对精度error 显示出错信息并中断执行errortrap 错误发生后程序是否继续执行的控制erf 误差函数erfc 误差补函数erfcx 刻度误差补函数erfinv 逆误差函数errorbar 带误差限的曲线图etreeplot 画消去树eval 串演算指令evalin 跨空间串演算指令exist 检查变量或函数是否已定义exit 退出Matlab环境exp 指数函数expand 符号计算中的展开操作expint 指数积分函数expm 常用矩阵指数函数expm1 Pade法求矩阵指数expm2 Taylor法求矩阵指数expm3 特征值分解法求矩阵指数eye 单位阵ezcontour 画等位线的简捷指令ezcontourf 画填色等位线的简捷指令ezgraph3 画表面图的通用简捷指令ezmesh 画网线图的简捷指令ezmeshc 画带等位线的网线图的简捷指令ezplot 画二维曲线的简捷指令ezplot3 画三维曲线的简捷指令ezpolar 画极坐标图的简捷指令ezsurf 画表面图的简捷指令ezsurfc 画带等位线的表面图的简捷指令F ffactor 符号计算的因式分解feather 羽毛图feedback 反馈连接feval 执行由串指定的函数fft 离散Fourier变换fft2 二维离散Fourier变换fftn 高维离散Fourier变换fftshift 直流分量对中的谱fieldnames 构架域名figure 创建图形窗fill3 三维多边形填色图find 寻找非零元素下标findobj 寻找具有指定属性的对象图柄findstr 寻找短串的起始字符下标findsym 机器确定内存中的符号变量finverse 符号计算中求反函数fix 向零取整flag 红白蓝黑交错色图阵fliplr 矩阵的左右翻转flipud 矩阵的上下翻转flipdim 矩阵沿指定维翻转floor 向负无穷取整flops 浮点运算次数flow Matlab提供的演示数据fmin 求单变量非线性函数极小值点(旧版)fminbnd 求单变量非线性函数极小值点fmins 单纯形法求多变量函数极小值点(旧版)。
惩罚函数法
解出x1,x2
5M 4 M 5 x1 x2 2.5 2M 1 2
此时x1,x2则满足约束条件,是原问题的解。
§2惩罚函数法
§2惩罚函数法
§2惩罚函数法
§2惩罚函数法
§2惩罚函数法
§2惩罚函数法 例:内点法求解约束问题 min f (u ) au(a 0) s.t.g (u ) b u 0(b 0)
§2惩罚函数法
§2惩罚函数法
§2罚函数法
§2惩罚函数法
§2惩罚函数法
§2惩罚函数法
s.t. h (xi)=x1+ x2-5=0
该问题只有等式约束 解:首先建立罚函数:
F ( x, M ) f ( x) Mp( x)
P( x)
(max( 0, g
i 1
l
i
( x )))
2
( h j ( x ))
j 1
m
2
( x1 x 2 5) 2
F ( x, M ) ( x1 4) 2 ( x2 4) 2 M ( x1 x2 5) 2
此时的x1,x2不满足约束条件,不是原问题的解。
当x 不属于 S 时
F§2惩罚函数法 ( x2 4) 2 M ( x1 x2 5) 2 ( x, M ) ( x1 4) 2
F 2( x1 4) 2M ( x1 x 2 5) 0 x1 F 2( x 2 4) 2M ( x1 x 2 5) 0 x 2
*
rk a 2 (b u )
rk a
F (u , rk ) f (u ) rk a (b rk 0
1 1 au rk g (u ) bu
罚函数法
i =1 i =1 j =1
m+ p
m
p
α
p ⎡m α⎤ F ( x , M ) = f ( x ) + M ⎢ ∑ max{0, gi ( x )}α + ∑ h j ( x ) ⎥ j =1 ⎣ i =1 ⎦
(2.1)
或 p( x ) = c ( x )
∞
= max ci ( x ) = max{max{0, gi ( x )}, i = 1," , m, h j ( x ) , j = 1," , p} ,则
k k k k
(2.2)
F ( xk , M k ) → F * , f ( xk ) → f *
则 M k p ( x ) = F ( x , M k ) − f ( x ) → F − f ,再由 M k → +∞ 得
k k k
*
*
p( x k ) → 0
k k k k
(2.3)
故当 k 充分大时 x ∈ Sδ 。由 Sδ 为紧集,因此{ x }存在收敛子列 { x }k∈J ,设 x → x ( k ∈ J ) 。由已知 条件知 f ( x ) 和 p ( x ) 是连续函数,由(2.3)得 p ( x ) = 0 ,故 x ∈ S ,再由(2.2)得
*
K
知, {F ( x , M k )} 和 { f ( x )} 是单调增序列,并且
k
k
f ( x* ) = F ( x* , M k ) ≥ F ( x k , M k ) ≥ f ( x k )
即 {F ( x , M k )} 和 { f ( x )} 有上界,故 {F ( x , M k )} 和 { f ( x )} 收敛,设
优化方法MATLAB编程——大连理工大学
优化方法上机大作业学院:姓名:学号:指导老师:肖现涛第一题源程序如下:function zy_x = di1ti(x)%di1ti是用来求解优化作业第一题的函数。
x0=x; yimuxulong=0.000001;g0=g(x0);s0=-g0;A=2*ones(100,100);k=0;while k<100lanmed=-(g0)'*s0/(s0'*A*s0);x=x0+lanmed*s0;g=g(x);k=k+1;if norm(g)<yimuxulongzy_x=x;fprintf('After %d iterations,obtain the optimal solution.\n \n The optimal solution is \n %f.\n\nThe optimal "x" is "ans".',k,f(x) )break;endmiu=norm(g)^2/norm(g0)^2;s=-g+miu*s0;g0=g; s0=s;x0=x;endfunction f=f(x)f=(x'*ones(100,1))^2-x'*ones(100,1);function g=g(x)g=(2*x'*ones(100,1))*ones(100,1)-ones(100,1);代入x0,运行结果如下:>> x=zeros(100,1);>> di1ti(x)After 1 iterations,obtain the optimal solution.The optimal solution is-0.250000.The optimal "x" is "ans".ans =0.005*ones(100,1).第二题1.最速下降法。
方程组的各种解法法的Matlab程序及运行结果
1.列主元高斯消去法M文件function[x]=gauss(a,b)n=length(a);x=zeros(n,1);a=[a b];for k=1:n-1max=k;for i=k+1:nif a(i,k)>a(max,k)max=i;endendtemp=a(k,k:n+1);a(k,k:n+1)=a(max,k:n+1);a(max,k:n+1)=temp;for i=k+1:na(i,k)=-a(i,k)/a(k,k);a(i,k+1:n+1)=a(i,k+1:n+1)+a(i,k)*a(k,k+1:n+1);endendx(n,1)=a(n,n+1)/a(n,n);for i=n-1:-1:1sum=0;for j=i+1:nsum=sum+x(j,1)*a(i,j);endx(i,1)=(a(i,n+1)-sum)/a(i,i);endMatlab运行结果2.LU三角分解法M文件function y=LU(A,B);n=length(A);A=[A B];for k=1:n-1;for i=k:n;if(abs(A(i,k))==max(abs(A(k:n,k))))P(k)=i;temp=A(k,:);A(k,:)=A(i,:);A(i,:)=temp;endendfor j=k+1:n;A(j,k)=A(j,k)/A(k,k);A(j,k+1:n+1)=A(j,k+1:n+1)-A(j,k)*A(k,k+1:n+1);endendP(n)=n;L(1,1)=1;L(2:n,1)=A(2:n,1);L(1,2:n)=0;U(1,1)=A(1,1);U(2:n,1)=0;U(1,2:n)=A(1,2:n);for i=2:n;L(i,1:i-1)=A(i,1:i-1);L(i,i)=1;L(i,i+1:n)=0;U(i,1:i-1)=0;U(i,i:n)=A(i,i:n);endx(n) = A(n,n+1)/U(n,n);for k = n-1:-1:1x(k)=A(k,n+1);for p=n:-1:k+1;x(k) = x(k)-U(k,p)*x(p); endx(k)=x(k)/U(k,k);endxLUPEndMatlab运行结果3.龙贝格(Romberg)算法M文件function[t]=romberg(f,a,b,e)t=zeros(15,4);t(1,1)=(b-a)/2*(f(a)+f(b));for k=2:4sum=0;for i=1:2^(k-2)sum=sum+f(a+(2*i-1)*(b-a)/2^(k-1));endt(k,1)=0.5*t(k-1,1)+(b-a)/2^(k-1)*sum;for i=2:kt(k,i)=(4^(i-1)*t(k,i-1)-t(k-1,i-1))/(4^(i-1)-1);endendfor k=5:15sum=0;for i=1:2^(k-2)sum=sum+f(a+(2*i-1)*(b-a)/2^(k-1));endt(k,1)=0.5*t(k-1,1)+(b-a)/2^(k-1)*sum;for i=2:4t(k,i)=(4^(i-1)*t(k,i-1)-t(k-1,i-1))/(4^(i-1)-1);endif k>6if abs(t(k,4)-t(k-1,4))<edisp(['答案',num2str(t(k,4))]);break;endendendif k>=15disp(['溢出']);endMatlab运行结果4.最小二乘法M文件function[a,max,det]=zuixiaoerchengfa(x,y,r) n=length(x);c=ones(n,r+1);for i=2:r+1for j=1:nc(j,i)=x(j)^(i-1);endendA=c'*c;b=c'*y';a=inv(A)*b;det=0;max=0;for i=1:nsum=a(1);for j=2:r+1sum=sum+a(j)*x(i)^(j-1);endcc=abs(y(i)-sum);if cc>maxmax=cc;enddet=det+cc^2;enddet=sqrt(det);Matlab运行结果§2.1.1 二分法的MATLAB主程序function [k,x,wuca,yx]=erfen(a,b,abtol)a(1)=a; b(1)=b;ya=fun(a(1)); yb=fun(b(1)); %程序中调用的fun.m 为函数if ya* yb>0,disp('注意:ya*yb>0,请重新调整区间端点a和b.'), returnendmax1=-1+ceil((log(b-a)- log(abtol))/ log(2)); % ceil是向+方向取整∞for k=1: max1+1a;ya=fun(a); b;yb=fun(b); x=(a+b)/2;yx=fun(x); wuca=abs(b-a)/2; k=k-1;[k,a,b,x,wuca,ya,yb,yx]if yx==0a=x; b=x;elseif yb*yx>0b=x;yb=yx;elsea=x; ya=yx;endif b-a< abtol , return, endendk=max1; x; wuca; yx=fun(x);§2.1.2 不动点迭代法的MATLAB主程序function [k,piancha,xdpiancha,xk,yk]=diedai2(x0,tol,ddmax) x(1)=x0;for i=1: ddmaxx(i+1)=fun(x(i));piancha=abs(x(i+1)-x(i));xdpiancha=piancha/( abs(x(i+1))+eps);i=i+1;xk=x(i);yk=fun(x(i)); [(i-1) piancha xdpiancha xk yk]if (piancha<tol)|(xdpiancha< tol)k=i-1; xk=x(i);return;endendif i>ddmaxdisp('迭代次数超过给定的最大值ddmax')k=i-1; xk=x(i);yk=fun(x(i));[(i-1) piancha xdpiancha xk yk];return;endP=[(i-1),piancha,xdpiancha,xk,yk]';§2.1.3 艾特肯加速迭代法的MATLAB主程序function [k,xk,yk,p]= Aitken (x0,tol, ddmax)x(1)=x0;for i=1: ddmaxx1(i+1)=fun(x(i)); x2(i+1)=fun(x1(i+1));x(i+1)=x2(i+1)-(x2(i+1)-x1(i+1))^2/(x2(i+1)-2*x1(i+1)+ x(i));piancha=abs(x(i+1)-x(i));xdpiancha= piancha/( abs(x(i+1))+eps);i=i+1; xk=x(i);yk=fun(x(i));if (piancha<tol)|(xdpiancha<tol)k=i-1; xk=x(i); yk=fun(x(i));m=[0,1:i-1]; p=[m',x1',x2',x'];return;endendif i>ddmaxdisp('迭代次数超过给定的最大值ddmax')k=i-1; xk=x(i); yk=fun(x(i));m=[0,1:i-1]; p=[m',x1',x2',x'];return;endm=[0,1:i-1]; p=[m',x1',x2',x'];§2.1.4 牛顿切线法的MATLAB主程序function [k,xk,yk,piancha,xdpiancha]=newtonqx(x0,tol,ftol,gxmax) x(1)=x0;for i=1: gxmaxx(i+1)=x(i)-fun(x(i))/(dfun(x(i))+eps);piancha=abs(x(i+1)-x(i));xdpiancha= piancha/( abs(x(i+1))+eps); i=i+1;xk=x(i);yk=fun(x(i)); [(i-1) xk yk piancha xdpiancha]if (abs(yk)<ftol)&((piancha<tol)|(xdpiancha< tol))k=i-1; xk=x(i);[(i-1) xk yk piancha xdpiancha]return;endendif i>gxmaxdisp('请注意:迭代次数超过给定的最大值gxmax。
惩罚函数法概述_内点法
一 基本原理
惩罚函数法是应用广泛,非常有效的间接解 法.又称为序列无约束极小化方法(SUMT法). 该方法通过将原约束优化问题中的等式和 不等式约束函数加权处理后与原目标函数结合, 得到新的目标函数(惩罚函数).原问题转化为新的 无约束优化问题,求解该新的无约束优化问题,间 接得到原约束优化问题的最优解.
内 点 法 程 序 框 图
举例
用内点法求最优点:
2 min f ( x) x12 x2
解: r ( x, r ) f ( x ) g ( x) r 2 2 ( x, r ) x1 x2 1 x1
s.t.g ( x ) 1 x1 0
or ( x, r ) f ( x) r ln( g ( x))
r1 , r2
加权因子(惩罚因子)
原约束优化问题转化为无约束优化问题:
min ( x, r1 , r2 ) f ( x) r1 G[ g j ( x)]
j 1
m
r2 H [hk ( x)]
k 1
l
改变惩罚因子r1, r2的值,就会得到一系列的无约束优 化问题,求解得到一系列的无约束最优解(系列迭代点),这些 最优解逐渐的逼近原约束优化问题的最优解.
min f ( x) g j ( x) 0 ( j 1,2,...,m) hk ( x) 0 (k 1,2,...,l)
( x, r1 , r2 ) f ( x) r1 G[ g j ( x)] r2 H [hk ( x)]
j 1 k 1 m l
障碍项
惩罚项
二 惩罚函数法分类
内点惩罚函数法(内点法)
外点惩罚函数法(外点法) 混合惩罚函数法(混合法)
第五章惩罚函数法详解
㈣关于几个参数的选择
⑴初始罚因子r(0)的选取
如果 值选得太大,则在一开始罚函数的惩罚项的 值将远远超出原目标函数的值,因此,它的第一次无约束极 小点将远离原问题的约束最优点。在以后的迭代中,需要很 长时间的搜索才能使序列无约束极小点逐渐向约束最优点逼近。
如果 值选得太小,则在一开始惩罚项的作用甚小,
而在可行域内部惩罚函数
与原目标函数F(x)很相近,
只在约束边界附近罚函数值才突然增高。这样,使其罚函数
在在约束边界附近出现深沟谷地,罚函数的性态变得恶劣。
如下图,对于有深沟谷地性态差的函数,不仅搜索所需的 时间长,而且很难使迭代点进入最优的邻域,以致极易使 迭代点落入非可行域而导致计算的失败。
或
r(0)=1~50
函数
的一系(x,列r(k最) ) 优点,
xk* (k 0,1,2, )
显见,无约束最优点序列将逐渐趋近于原约
束优化问题的最优点x*。
㈡内点罚数法的形式及特点
⑴具有不等式约束的优化问题的数学模型
S.T. :
u=1,2……,p
⑵构造如下形式的内点罚函数
p
(x, r (k) ) F (x) r (k)
而且,当x越趋近于约束边界时,由于惩罚项 r(k) 1
增大,所以罚函数 (x, r(的k) )值越大。当x←b时,罚g1函(x)
数的值将趋近于+∞。因此,当初始点取在可行域内,求
函数 (x, r(k)的) 极小值时,只要适当控制搜索步长,
防止迭代点跨入非可行域,则所搜索到的无约束极小点 x*必可保持在可行域内。
⑹由终止准则,若满足则转步骤⑺,否则转⑸⑺,输出最优解(x*,F*)
入口
给定:x(0) ∈D,r(0),C,ε1,ε2
内点法求解约束优化问题matlab

内点法求解约束优化问题matlab引言约束优化问题是在一定的约束条件下,求解使得目标函数取得最大或最小值的一类数学问题。
内点法是一种求解约束优化问题的方法,它通过从可行域内逐步向目标点靠近的方式来寻找最优解。
本文将介绍在Matlab中如何使用内点法来求解约束优化问题。
约束优化问题的表达方式约束优化问题的一般形式如下:其中,f(x)是目标函数,g(x)为不等式约束条件,h(x)为等式约束条件。
内点法的基本思想内点法通过将约束优化问题转化为无约束优化问题来求解。
它引入了一个惩罚函数,将约束条件转化为目标函数的约束,并使用罚函数系数来控制约束的强度。
内点法根据罚函数系数的不断减小,从初始点开始逐步靠近最优解。
Matlab实现内点法解约束优化问题## 准备工作在使用Matlab求解约束优化问题之前,需要确保计算机上已经安装了优化工具箱(Optimization Toolbox)。
如果没有安装,则可以通过以下命令进行安装:如果输出信息中包含优化工具箱,则说明已经安装了,否则可以通过以下命令进行安装:## 定义目标函数和约束条件在Matlab中,可以通过函数句柄的形式来表示目标函数和约束条件。
例如,假设目标函数为f(x),不等式约束条件为g(x),等式约束条件为h(x),可以分别定义为:```f = @(x) x(1)^2 + x(2)^2; % 目标函数g = @(x) [x(1) + x(2) - 1; -x(1) - x(2) - 1]; % 不等式约束条件h = @(x) []; % 等式约束条件```## 定义初始点和罚函数系数接下来,需要定义初始点和罚函数系数。
初始点可以任意指定,罚函数系数可以根据实际问题进行调整。
例如,假设初始点为x0,罚函数系数为mu,可以定义为:```x0 = [0; 0]; % 初始点mu = 1; % 罚函数系数```## 求解约束优化问题最后,可以使用内点法来求解约束优化问题。
三个参数matlab程序,用matlab求定积分的三个实例代码
三个参数matlab程序,⽤matlab求定积分的三个实例代码⼀、符号积分符号积分由函数int来实现。
该函数的⼀般调⽤格式为:int(s):没有指定积分变量和积分阶数时,系统按findsym函数指⽰的默认变量对被积函数或符号表达式s求不定积分;int(s,v):以v为⾃变量,对被积函数或符号表达式s求不定积分;int(s,v,a,b):求定积分运算。
a,b分别表⽰定积分的下限和上限。
该函数求被积函数在区间[a,b]上的定积分。
a和b可以是两个具体的数,也可以是⼀个符号表达式,还可以是⽆穷(inf)。
当函数f关于变量x在闭区间[a,b]上可积时,函数返回⼀个定积分结果。
当a,b中有⼀个是inf 时,函数返回⼀个⼴义积分。
当a,b中有⼀个符号表达式时,函数返回⼀个符号函数。
例:求函数x^2+y^2+z^2的三重积分。
内积分上下限都是函数,对z积分下限是sqrt(x*y),积分上限是x^2*y;对y积分下限是sqrt(x),积分上限是x^2;对x的积分下限1,上限是2,求解如下:>>syms x y z %定义符号变量>>F2=int(int(int(x^2+y^2+z^2,z,sqrt(x*y),x^2*y),y,sqrt(x),x^2),x,1,2) %注意定积分的书写格式F2 =1610027357/6563700-6072064/348075*2^(1/2)+14912/4641*2^(1/4)+64/225*2^(3/4) %给出有理数解>>VF2=vpa(F2) %给出默认精度的数值解VF2 =224.92153573331143159790710032805⼆、数值积分1.数值积分基本原理求解定积分的数值⽅法多种多样,如简单的梯形法、⾟普⽣(Simpson)法、⽜顿-柯特斯(Newton-Cotes)法等都是经常采⽤的⽅法。
它们的基本思想都是将整个积分区间[a,b]分成n个⼦区间[xi,xi+1],i=1,2,…,n,其中x1=a,xn+1=b。
二次罚函数法matlab代码
二次罚函数法是一种常用的无约束优化方法,它通过引入惩罚函数来处理无约束优化问题,将原问题转化为带约束的优化问题。
在matlab 中,我们可以利用二次罚函数法来求解一些复杂的优化问题。
接下来,我们将详细介绍二次罚函数法的原理和在matlab中的实现步骤。
一、二次罚函数法原理1. 二次罚函数法的基本思想二次罚函数法是一种常用的无约束优化方法,它的基本思想是通过引入罚函数来处理无约束优化问题。
具体来说,对于原无约束优化问题min f(x)将其转化为带约束的优化问题min f(x) + μ||g(x)||^2其中,g(x)表示原问题的约束条件,μ为惩罚参数。
通过不断增大μ的值,原问题的解将逐渐逼近满足约束条件的最优解。
2. 二次罚函数法的优化步骤使用二次罚函数法求解优化问题的一般步骤如下:(1)选择初始点x0、罚参数μ0和容许误差ε>0;(2)计算xk的解析梯度gk和黑塞矩阵Hk;(3)构造罚函数Pk(x) = f(x) + μk||g(x)||^2,对Pk(x)进行优化,得到新的迭代点xk+1;(4)如果满足停止条件||gk|| < ε,则停止迭代,输出xk为最优解;否则,更新罚参数μk+1=αμk,返回步骤(2)继续迭代。
以上就是二次罚函数法的基本原理和优化步骤。
接下来,我们将介绍在matlab中如何实现二次罚函数法。
二、matlab实现二次罚函数法在matlab中,我们可以利用fmincon函数来实现二次罚函数法。
fmincon函数是matlab中用于求解约束和无约束优化问题的函数,其基本调用格式如下:x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub)其中,fun为目标函数,x0为初始点,A、b、Aeq、beq、lb、ub为约束条件。
在使用fmincon求解二次罚函数法时,我们需要将原无约束优化问题转化为带约束的优化问题,然后传入fmincon函数进行求解。
具体实现步骤如下:(1)将原无约束优化问题转化为带约束的优化问题,构造罚函数Pk(x) = f(x) + μk||g(x)||^2;(2)利用fmincon函数求解带约束的优化问题,得到每一步迭代的最优解xk;(3)更新罚参数μk+1=αμk,返回步骤(2)继续迭代,直至满足停止条件。
内点法最优潮流MATLAB算法
内点法最优潮流MATLAB算法clear;%clc;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%初始化%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%数据加载n=input('请输入要计算的节点系统(5):')load Node5.txt;%节点数据load Branch5.txt;%支路数据load Generator5.txt;%发电机数据Node=Node5;Branch=Branch5;Generator=Generator5;%节点数据处理N=Node(:,1);%节点号Type=Node(:,2);%节点类型Uamp=Node(:,3);%节点电压幅值Dlta=Node(:,4);%节点电压相角Pd=Node(:,5);%节点负荷有功Qd=Node(:,6);%节点负荷无功Pg=Node(:,7);%节点出力有功Qg=Node(:,8);%节点出力无功Umax=Node(:,9);%节点电压幅值上限 Umin=Node(:,10);%节点电压幅值下限Bc=Node(:,11);%节点补偿电容电纳值 %支路数据处理Nbr=Branch(:,1);%支路号Nl=Branch(:,2);%支路首节点Nr=Branch(:,3);%支路末节点R=Branch(:,4);%支路电阻X=Branch(:,5);%支路电抗Z=R+1i*X;%支路阻抗=支路电阻+支路电抗 Bn=Branch(:,6);%支路对地电纳K=Branch(:,7);%支路变压器变比,0表示无变压器 Ptmax=Branch(:,8);%线路传输功率上限%发电机数据处理Ng=Generator(:,1);%发电机序号Nbus=Generator(:,2);%所在母线号Pumax=Generator(:,3);%发电机有功出力上界 Qumax=Generator(:,4);%发电机无功出力上界 Pumin=Generator(:,5);%发电机有功出力下界Qumin=Generator(:,6);%发电机无功出力下界a2=Generator(:,7);%燃料耗费曲线二次系数a1=Generator(:,8);%燃料耗费曲线一次系数a0=Generator(:,9);%燃料耗费曲线常数项%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%n=length(N);%节点个数ng=length(Ng);%发电机台数nbr=length(Nbr);%支路个数x=zeros(2*(ng+n),1);%控制变量+状态变量x(1:ng)=Pg(Nbus);x(ng+1:2*ng)=Qg(Nbus);x((2*ng+2):2:2*(ng+n))=Uamp; x((2*ng+1):2:2*(ng+n)-1)=Dlta; l=0.8*ones(2*ng+n+nbr,1);%松弛变量u=1.1*ones(2*ng+n+nbr,1);%松弛变量w=-1.5*ones(2*ng+n+nbr,1);%拉格朗日乘子z=ones(2*ng+n+nbr,1);%拉格朗日乘子y=zeros(2*n,1);%拉格朗日乘子y(1:2:2*n-1)=1e-3;y(2:2:2*n)=-1e-3;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%计算不等式约束的上下限%%%%%%%%%%%%%%%%%%%%%%%%%gmingmin=zeros(2*ng+n+nbr,1);gmin(1:ng)=Pumin;gmin(ng+1:2*ng)=Qumin;gmin(2*ng+1:2*ng+n)=Umin;gmin(2*ng+n+1:2*ng+n+nbr)=-Ptmax; %gmaxgmax=zeros(2*ng+n+nbr,1);gmax(1:ng)=Pumax;gmax(ng+1:2*ng)=Qumax;gmax(2*ng+1:2*ng+n)=Umax;gmax(2*ng+n+1:2*ng+n+nbr)=Ptmax;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%形成导纳矩阵%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%Y=zeros(n,n);%%%%%%%%%%%%%%%%%%%%计算非对角元素%%%%%%%%%%%%%%%%%%%%% for ii=1:nbr if K(ii)==0%非变压器支路Y(Nl(ii),Nr(ii))=-1/Z(ii);Y(Nr(ii),Nl(ii))=Y(Nl(ii),Nr(ii));else%变压器支路Y(Nl(ii),Nr(ii))=-1/Z(ii)/K(ii);Y(Nr(ii),Nl(ii))= Y(Nl(ii),Nr(ii));endend%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%计算对角元素%%%%%%%%%%%%%%%%%%%%%%for ii=1:n%将支路导纳加入到对角元素中for jj=1:nbrif K(jj)==0&&(Nl(jj)==ii||Nr(jj)==ii)%非变压器支路Y(ii,ii)=Y(ii,ii)+1/Z(jj);else if K(jj)~=0&&(Nl(jj)==ii||Nr(jj)==ii)%变压器支路Y(ii,ii)=Y(ii,ii)+1/Z(jj)/K(jj);endendendendfor ii=1:nbr%将对地电纳加入到对角元素中if K(ii)==0%非变压器支路Y(Nl(ii),Nl(ii))=Y(Nl(ii),Nl(ii))+1i*Bn(ii);Y(Nr(ii),Nr(ii))=Y(Nr(ii),Nr(ii))+1i*Bn(ii);else%变压器支路Y(Nr(ii),Nr(ii))=Y(Nr(ii),Nr(ii))+(K(ii)-1)/K(ii)/Z(ii);Y(Nl(ii),Nl(ii))=Y(Nl(ii),Nl(ii))+(1-K(ii))/K(ii)/K(ii)/Z(ii);endendfor ii=1:nY(ii,ii)=Y(ii,ii)+i*Bc(ii);endG=real(Y);%电导B=imag(Y);%电纳%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%k=0;%迭代次数Kmax=150;%最大迭代次数iteration=1e-4;%误差精度delta=0.08;Gap=(l'*z-u'*w)*ones(Kmax,1);%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%主程序%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% while k<50%计算互补间隙GapGap(k+1)=l'*z-u'*w;if Gap>iterationmiu=delta*Gap(k+1)/(2*(2*ng+n+nbr)); %%%%%%%%%%%%%%%%%%%%%%%%%%%%形成系数矩阵%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%相角差计算%%%%%%%%%%%%%%%%%%%%%%theta=zeros(n,n);for ii=1:nfor jj=1:ntheta(ii,jj)=Dlta(ii)-Dlta(jj);endend %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%1、等式约束雅克比矩阵%%%%%%%%%%%%%%%%pxh=zeros(2*(ng+n),2*n); %%%%%%%%%%%%%%%%%%%%%%%ah/aP%%%%%%%%%%%%%%%%%%%%%%%for ii=1:ngpxh(Ng(ii),2*Nbus(ii)-1)=1;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%ah/aQ%%%%%%%%%%%%%%%%%%%%%%%for ii=1:ngpxh(Ng(ii)+ng,2*Nbus(ii))=1;end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%ah/ax%%%%%%%%%%%%%%%%%%%%%%%HH=zeros(n,n);JJ=zeros(n,n);NN=zeros(n,n);LL=zeros(n,n);for ii=1:nfor jj=1:nif ii~=jj%i!=j时的情况%非对角元素HH(ii,jj)=-Uamp(ii)*Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));JJ(ii,jj)=Uamp(ii)*Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin (theta(ii,jj)));NN(ii,jj)=-Uamp(ii)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)));LL(ii,jj)=-Uamp(ii)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%对角元素HH(ii,ii)=HH(ii,ii)+Uamp(ii)*Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));JJ(ii,ii)=JJ(ii,ii)-Uamp(ii)*Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)) );NN(ii,ii)=NN(ii,ii)-Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)));LL(ii,ii)=LL(ii,ii)-Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));endendNN(ii,ii)=NN(ii,ii)-2*Uamp(ii)*G(ii,ii);LL(ii,ii)=LL(ii,ii)+2*Uamp(ii)*B(ii,ii);endpxh(1+2*ng:2:2*(n+ng)-1,1:2:2*n-1)=HH';pxh(1+2*ng:2:2*(n+ng)-1,2:2:2*n)=JJ';pxh(2+2*ng:2:2*(n+ng),1:2:2*n-1)=NN';pxh(2+2*ng:2:2*(n+ng),2:2:2*n)=LL';%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%2、不等式约束的雅克比矩阵%%%%%%%%%%%%%%%%%%%% %g1:电源有功出力上下限约束ag1aP=eye(ng,ng);ag1aQ=zeros(ng,ng);ag1ax=zeros(2*n,ng);%g2:电源无功出力上下限约束ag2aP=zeros(ng,ng);ag2aQ=eye(ng,ng);ag2ax=zeros(2*n,ng);%g3:节点电压幅值上下限约束ag3aP=zeros(ng,n);ag3aQ=zeros(ng,n);ag3ax=zeros(2*n,n);for ii=1:nag3ax(2*ii,ii)=1;end%g4:线路潮流上下限约束ag4aP=zeros(ng,nbr);ag4aQ=zeros(ng,nbr);ag4ax=zeros(2*n,nbr);for ii=1:nfor jj=1:nbrif Nl(jj)==iiag4ax(2*ii-1,jj)=-Uamp(Nl(jj))*Uamp(Nr(jj))*(G(Nl(jj),Nr(jj))*sin(theta(Nl(jj),N r(jj)))-B(Nl(jj),Nr(jj))*cos(theta(Nl(jj),Nr(jj))));ag4ax(2*ii,jj)=Uamp(Nr(jj))*(G(Nl(jj),Nr(jj))*cos(theta(Nl(jj),Nr(jj )))+B(Nl(jj),Nr(jj))*sin(theta(Nl(jj),Nr(jj))))-2*Uamp(Nl(jj))*G(Nl(jj),Nr(jj));endif Nr(jj)==iiag4ax(2*ii-1,jj)=Uamp(Nl(jj))*Uamp(Nr(jj))*(G(Nl(jj),Nr(jj))*sin(theta(Nl(jj),Nr (jj)))-B(Nl(jj),Nr(jj))*cos(theta(Nl(jj),Nr(jj))));ag4ax(2*ii,jj)=Uamp(Nl(jj))*(G(Nl(jj),Nr(jj))*cos(theta(Nl(jj),Nr(jj )))+B(Nl(jj),Nr(jj))*sin(theta(Nl(jj),Nr(jj))));endendendpxg=[ag1aP ag2aP ag3aP ag4aP;ag1aQ ag2aQ ag3aQ ag4aQ;ag1ax ag2ax ag3ax ag4ax];%此即为不等式约束的雅克比矩阵%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%3、对角矩阵%%%%%%%%%%%%%%%%%%%%%%%% L_1Z=zeros(2*ng+n+nbr,2*ng+n+nbr);U_1W=zeros(2*ng+n+nbr,2*ng+n+nbr);for ii=1:2*ng+n+nbrL_1Z(ii,ii)=z(ii)/l(ii);U_1W(ii,ii)=w(ii)/u(ii);end%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%海森伯矩阵%%%%%%%%%%%%%%%%%%%%%%%%%% %将海森伯矩阵分为4块:H1,H2,H3,H4%%%%%%%%%%%%%%%%%%%%%H1%%%%%%%%%%%%%%%%%%%%%%A2=diag(a2);H1=zeros(2*(ng+n),2*(ng+n));H1(1:ng,1:ng)=2*A2;%%%%%%%%%%%%%%%%%%%%H2%%%%%%%%%%%%%%%%%%%%%%H2=zeros(2*(ng+n),2*(ng+n));A=zeros(2*n,2*n);Apb=zeros(2*n,2*n,n);Aqb=zeros(2*n,2*n,n);for ii=1:nfor jj=1:n %元素位置为:1 2if ii~=jj % 3 4%对角线上与ii对应的元素%ApApb(2*ii-1,2*ii-1,ii)=Apb(2*ii-1,2*ii-1,ii)+Uamp(ii)*Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(i i,jj)));%对角线处1号元素Apb(2*ii-1,2*ii,ii)=Apb(2*ii-1,2*ii,ii)+Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%对角线处2号元素%%3号元素与之相等%AqAqb(2*ii-1,2*ii-1,ii)=Aqb(2*ii-1,2*ii-1,ii)+Uamp(ii)*Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%对角线处1号元素Aqb(2*ii-1,2*ii,ii)=Aqb(2*ii-1,2*ii,ii)-Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)));%对角线处2号元素%%3号元素与之相等%对角线上与jj对应的元素%ApApb(2*jj-1,2*jj-1,ii)=Uamp(ii)*Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(i i,jj)));%对角线处1号元素Apb(2*jj-1,2*jj,ii)=-Uamp(ii)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj))); %对角线处2号元素Apb(2*jj,2*jj-1,ii)=Apb(2*jj-1,2*jj,ii);%3号元素与2号元素相等%AqAqb(2*jj-1,2*jj-1,ii)=Uamp(ii)*Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%对角线处1号元素Aqb(2*jj-1,2*jj,ii)=Uamp(ii)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj ))); %对角线处2号元素Aqb(2*jj,2*jj-1,ii)=Aqb(2*jj-1,2*jj,ii);%3号元素与2号元素相等%4号元素为0%非对角线行元素%ApApb(2*ii-1,2*jj-1,ii)=-Uamp(ii)*Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)) );%非对角线行处1号元素Apb(2*ii-1,2*jj,ii)=Uamp(ii)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%非对角线行处2号元素Apb(2*ii,2*jj-1,ii)=-Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%非对角线行处3号元素Apb(2*ii,2*jj,ii)=-(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)));%非对角线行处4号元素%AqAqb(2*ii-1,2*jj-1,ii)=-Uamp(ii)*Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%非对角线行处1号元素Aqb(2*ii-1,2*jj,ii)=-Uamp(ii)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)));%非对角线行处2号元素Aqb(2*ii,2*jj-1,ii)=Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(theta(ii,jj)));%非对角线行处3号元素Aqb(2*ii,2*jj,ii)=-(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));%非对角线行处4号元素%非对角线列元素%ApApb(2*jj-1,2*ii-1,ii)=Apb(2*ii-1,2*jj-1,ii);%非对角线列处1号元素Apb(2*jj-1,2*ii,ii)=Apb(2*ii,2*jj-1,ii);%非对角线列处2号元素Apb(2*jj,2*ii-1,ii)=Apb(2*ii-1,2*jj,ii);%非对角线列处3号元素Apb(2*jj,2*ii,ii)=Apb(2*ii,2*jj,ii);%%非对角线列处4号元素%AqAqb(2*jj-1,2*ii-1,ii)=Aqb(2*ii-1,2*jj-1,ii);%非对角线列处1号元素Aqb(2*jj-1,2*ii,ii)=Aqb(2*ii,2*jj-1,ii);%非对角线列处2号元素Aqb(2*jj,2*ii-1,ii)=Aqb(2*ii-1,2*jj,ii);%非对角线列处3号元素Aqb(2*jj,2*ii,ii)=Aqb(2*ii,2*jj,ii);%%非对角线列处4号元素endend%对角线上与ii对应的元素%ApApb(2*ii,2*ii-1,ii)=Apb(2*ii-1,2*ii,ii);%对角线处3号元素与2号元素相等Apb(2*ii,2*ii,ii)=-2*G(ii,ii);%对角线处4号元素%AqAqb(2*ii,2*ii-1,ii)=Aqb(2*ii-1,2*ii,ii);%对角线处3号元素与2号元素相等Aqb(2*ii,2*ii,ii)=2*B(ii,ii);%对角线处4号元素endfor ii=1:nA=A+Apb(:,:,ii)*y(2*ii-1)+Aqb(:,:,ii)*y(2*ii);endH2(2*ng+1:2*(ng+n),2*ng+1:2*(ng+n))=A;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%H3%%%%%%%%%%%%%%%%%%%%%%H3=zeros(2*(ng+n),2*(ng+n));A3=zeros(2*n,2*n);Apc=zeros(2*n,2*n,nbr);for ii=1:nbr%对角线上iiApc(2*Nl(ii)-1,2*Nl(ii)-1,ii)=-Uamp(Nl(ii))*Uamp(Nr(ii))*(G(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii)))+B( Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii))));Apc(2*Nl(ii)-1,2*Nl(ii),ii)=-Uamp(Nr(ii))*(G(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii)))-B(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii))));Apc(2*Nl(ii),2*Nl(ii)-1,ii)=Apc(2*Nl(ii)-1,2*Nl(ii),ii);Apc(2*Nl(ii),2*Nl(ii),ii)=-2*G(Nl(ii),Nr(ii));%对角线上jjApc(2*Nr(ii)-1,2*Nr(ii)-1,ii)=-Uamp(Nl(ii))*Uamp(Nr(ii))*(G(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii)))+B( Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii))));Apc(2*Nr(ii)-1,2*Nr(ii),ii)=Uamp(Nl(ii))*(G(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii)))-B(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii))));Apc(2*Nr(ii),2*Nr(ii)-1,ii)=Apc(2*Nr(ii)-1,2*Nr(ii),ii);Apc(2*Nr(ii),2*Nr(ii),ii)=0;%非对角线ijApc(2*Nl(ii)-1,2*Nr(ii)-1,ii)=Uamp(Nl(ii))*Uamp(Nr(ii))*(G(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii )))+B(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii))));Apc(2*Nl(ii)-1,2*Nr(ii),ii)=-Uamp(Nl(ii))*(G(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii)))-B(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii))));Apc(2*Nl(ii),2*Nr(ii)-1,ii)=Uamp(Nr(ii))*(G(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii)))-B(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii))));Apc(2*Nl(ii),2*Nr(ii),ii)=G(Nl(ii),Nr(ii))*cos(theta(Nl(ii),Nr(ii))) +B(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii)));%非对角线jiApc(2*Nr(ii)-1,2*Nl(ii)-1,ii)=Apc(2*Nl(ii)-1,2*Nr(ii)-1,ii);Apc(2*Nr(ii)-1,2*Nl(ii),ii)=Apc(2*Nl(ii),2*Nr(ii)-1,ii);Apc(2*Nr(ii),2*Nl(ii)-1,ii)=Apc(2*Nl(ii)-1,2*Nr(ii),ii);Apc(2*Nr(ii),2*Nl(ii),ii)=Apc(2*Nl(ii),2*Nr(ii),ii);%求和c=z+w;A3=A3+Apc(:,:,ii)*c(2*ng+n+ii);endH3(2*ng+1:2*(ng+n),2*ng+1:2*(ng+n))=A3;%%%%%%%%%%%%%%%%%%%%%%%H4%%%%%%%%%%%%%%%%%%%%%%%%%H4=pxg*(L_1Z-U_1W)*pxg';%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%H=-H1+H2+H3-H4;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%形成常数项%%%%%%%%%%%%%%%%%%%%%%%%% %Lyh=zeros(2*n,1);for ii=1:nh(2*ii-1)=Pg(ii)-Pd(ii);h(2*ii)=Qg(ii)-Qd(ii);for jj=1:nh(2*ii-1)=h(2*ii-1)-Uamp(ii)*Uamp(jj)*(G(ii,jj)*cos(theta(ii,jj))+B(ii,jj)*sin(t heta(ii,jj)));h(2*ii)=h(2*ii)-Uamp(ii)*Uamp(jj)*(G(ii,jj)*sin(theta(ii,jj))-B(ii,jj)*cos(theta(ii,jj)));endendLy=h;%Lz%g(x)gx=zeros(2*ng+n+nbr,1);gx(1:ng)=x(1:ng);gx(ng+1:2*ng)=x(ng+1:2*ng);gx(2*ng+1:2*ng+n)=x(2*ng+2:2:2*(ng+n));for ii=1:nbrgx(2*ng+n+ii)=Uamp(Nl(ii))*Uamp(Nr(ii))*(G(Nl(ii),Nr(ii))*cos(theta( Nl(ii),Nr(ii)))+B(Nl(ii),Nr(ii))*sin(theta(Nl(ii),Nr(ii))))-Uamp(Nl(ii))*Uamp(Nl(ii))*G(Nl(ii),Nr(ii));endLz=gx-l-gmin;%LwLw=gx+u-gmax;%Lle=ones(2*ng+n+nbr,1);LZ=zeros(2*ng+n+nbr,2*ng+n+nbr);for ii=1:2*ng+n+nbr;LZ(ii,ii)=l(ii)*z(ii);endLl=LZ*e-miu*e;%LuUW=zeros(2*ng+n+nbr,2*ng+n+nbr);for ii=1:2*ng+n+nbrUW(ii,ii)=u(ii)*w(ii);endLu=UW*e+miu*e;%Lx'Lx1=zeros(2*(ng+n),1);Lx1(1:ng)=2*a2.*x(1:ng)+a1;Lx2=pxh*y;Lx3=pxg*c;Lx41=zeros(2*(ng+n),1);Lx42=zeros(2*(ng+n),1);for ii=1:2*ng+n+nbrLx41(ii)=(Ll(ii)+z(ii)*Lz(ii))/l(ii);Lx42(ii)=(Lu(ii)-w(ii)*Lw(ii))/u(ii);endLx4=pxg*(Lx41+Lx42);Lx=Lx1-Lx2-Lx3;Lxx=Lx+Lx4; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%求出修正量%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %dx,dyHxy=[H pxh;pxh' zeros(2*n,2*n)];LxLy=[Lxx;-Ly];I=eye(2*(ng+n)+2*n);dxdy=I/Hxy*LxLy;dx=dxdy(1:2*(ng+n));dy=dxdy(2*(ng+n)+1:2*(ng+n)+2*n);%dldl=pxg'*dx+Lz;%dudu=-pxg'*dx-Lw;%dzdz=zeros(2*ng+n+nbr,1);for ii=1:2*ng+n+nbrdz(ii)=(-Ll(ii)-z(ii)*dl(ii))/l(ii);end%dwdw=zeros(2*ng+n+nbr,1);for ii=1:2*ng+n+nbrdw(ii)=(-Lu(ii)-w(ii)*du(ii))/u(ii);end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%计算alfap和alfad%%%%%%%%%%%%%%%%%%%%%%%% alfap=1;alfad=1;for ii=1:2*ng+n+nbrif dl(ii)<0&&-l(ii)/dl(ii)<alfapalfap=-l(ii)/dl(ii);endif du(ii)<0&&-u(ii)/du(ii)<alfapalfap=-u(ii)/du(ii);endif dz(ii)<0&&-z(ii)/dz(ii)<alfadalfad=-z(ii)/dz(ii);endif dw(ii)>0&&-w(ii)/dw(ii)<alfadalfad=-w(ii)/dw(ii);endendalfap=0.9995*alfap;alfad=0.9995*alfad;x=x+alfap*dx;l=l+alfap*dl;u=u+alfap*du;y=y+alfad*dy;z=z+alfad*dz;w=w+alfad*dw;%迭代功率、电压幅值和相角for ii=1:ngPg(Nbus(ii))=x(ii);Qg(Nbus(ii))=x(ng+ii);endfor ii=1:nUamp(ii)=x(2*(ng+ii));Dlta(ii)=x(2*(ng+ii)-1);end %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% k=k+1;elsebreak;endendfcost=0;for ii=1:ngfcost=fcost+a2(ii)*Pg(Nbus(ii))*Pg(Nbus(ii))+a1(ii)*Pg(Nbus(ii))+a0( ii);endfcostkplot(0:k,Gap(1:k+1),':*');PgQgUampfor ii=1:nif Type(ii)==3Dlta=Dlta-Dlta(ii)*ones(n,1);endendDlta。
内点法的基本原理以及举例计算
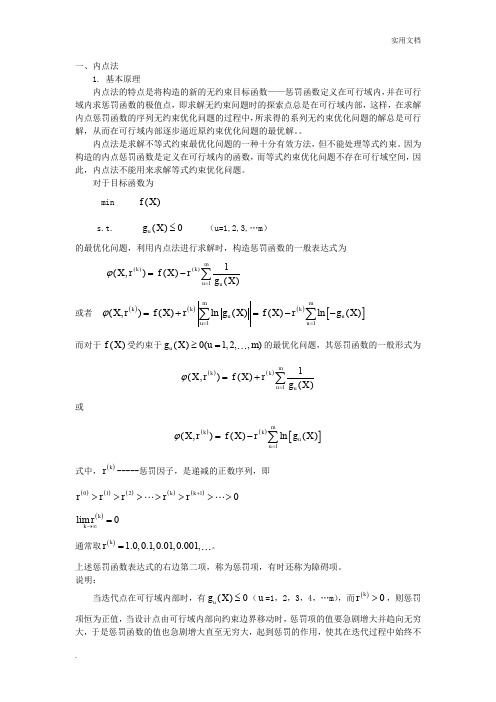
一、内点法1. 基本原理内点法的特点是将构造的新的无约束目标函数——惩罚函数定义在可行域内,并在可行域内求惩罚函数的极值点,即求解无约束问题时的探索点总是在可行域内部,这样,在求解内点惩罚函数的序列无约束优化问题的过程中,所求得的系列无约束优化问题的解总是可行解,从而在可行域内部逐步逼近原约束优化问题的最优解。
内点法是求解不等式约束最优化问题的一种十分有效方法,但不能处理等式约束。
因为构造的内点惩罚函数是定义在可行域内的函数,而等式约束优化问题不存在可行域空间,因此,内点法不能用来求解等式约束优化问题。
对于目标函数为min ()f Xs.t. ()0u g X ≤ (u=1,2,3,…m )的最优化问题,利用内点法进行求解时,构造惩罚函数的一般表达式为()()11(,)()()mk k u uX r f X rg X ϕ==-∑ 或者 ()()()[]11(,)()ln ()()ln ()mmk k k uuu u X rf X rg X f X rg X ϕ===+=--∑∑而对于()f X 受约束于()0(1,2,,)u g X u m ≥=的最优化问题,其惩罚函数的一般形式为()()11(,)()()mk k u uX r f X rg X ϕ==+∑ 或()()[]1(,)()ln ()mk k uu X r f X rgX ϕ==-∑式中,()k r-----惩罚因子,是递减的正数序列,即()()()()()1210kk r r r r r +>>>>>>>()lim 0k k r →∞=通常取()1.0,0.1,0.01,0.001,k r=。
上述惩罚函数表达式的右边第二项,称为惩罚项,有时还称为障碍项。
说明:当迭代点在可行域内部时,有()0u g X ≤(u =1,2,3,4,…m ),而()0k r>,则惩罚项恒为正值,当设计点由可行域内部向约束边界移动时,惩罚项的值要急剧增大并趋向无穷大,于是惩罚函数的值也急剧增大直至无穷大,起到惩罚的作用,使其在迭代过程中始终不会触及约束边界。
matlab罚函数乘子法
function [x,mu,lambda,output]=multphr(fun,hf,gf,dfun,dhf,dgf,x0) % 功能 : 用乘子法解一般约束问题 : min f(x), s.t. h(x)=0, g(x).=0 %输入:x0是初始点,fun, dfun分别是目标函数及其梯度;% hf, dhf 分别是等式约束(向量)函数及其 Jacobi 矩阵的转置;% gf, dgf 分别是不等式约束(向量)函数及其 Jacobi 矩阵的转置;%输出:x是近似最优点,mu, lambda分别是相应于等式约束和不% 等式约束的乘子向量 ; output 是结构变量 , 输出近似极小值 f, 迭% 代次数 , 内迭代次数等maxk=500; % 最大迭代次数sigma=2.0; % 罚因子eta=2.0; theta=0.8; %PHR 算法中的实参数k=0; ink=0; %k, ink 分别是外迭代和内迭代次数epsilon=1e-5; % 终止误差值x=x0; he=feval(hf,x); gi=feval(gf,x);n=length(x); l=length(he); m=length(gi);% 选取乘子向量的初始值mu=0.1*ones(l,1); lambda=0.1*ones(m,1);btak=10; btaold=10; % 用来检验终止条件的两个值while(btak>epsilon & k<maxk)%调用BFGS算法程序求解无约束子问题[x,ival,ik]=bfgs('mpsi','dmpsi',x0,fun,hf,gf,dfun,dhf,dgf,mu,lamb da,sigma); ink=ink+ik;he=feval(hf,x); gi=feval(gf,x); btak=0.0;for(i=1:l), btak=btak+he(y2; endfor(i=1:m)temp=min(gi(i),lambda(i)/sigma);btak=btak+temp A2;endbtak=sqrt(btak);if btak>epsilonif(k>=2 & btak >theta*btaold)sigma=eta*sigma;end%更新乘子向量for(i=1:l), mu(i)=mu(i)-sigma*he(i); end for(i=1:m)lambda(i)=max(0.0,lambda(i)-sigma*gi(i)); endendk=k+1;btaold=btak;x0=x;f=feval(fun,x);output.fval=f;output.iter=k;output.inner_iter=ink;output.bta=btak;%%%%%%%%%%%%%%%%%% 增广拉格朗日函数%%%%%%%%%%%%%%%%%%%%% function psi=mpsi(x,fun,hf,gf,dfun,dhf,dgf,mu,lambda,sigma) f=feval(fun,x); he=feval(hf,x); gi=feval(gf,x);l=length(he); m=length(gi);psi=f; s1=0.0;for(i=1:l)psi=psi-he(i)*mu(i);s1=s1+he(i)A2;endpsi=psi+0.5*sigma*s1;s2=0.0;for(i=1:m)s3=max(0.0, lambda(i) - sigma*gi(i));s2=s2+s3A2-lambda(i)A2;psi=psi+s2/(2.0*sigma);%%%%%%%%%%%%%%%%%% 增广拉格朗日函数的梯度%%%%%%%%%%%%%%%%%%%%function dpsi=dmpsi(x,fun,hf,gf,dfun,dhf,dgf,mu,lambda,sigma) dpsi=feval(dfun,x);he=feval(hf,x); gi=feval(gf,x);dhe=feval(dhf,x); dgi=feval(dgf,x);l=length(he); m=length(gi);for(i=1:l)dpsi=dpsi+(sigma*he(i)-mu(i))*dhe(:,i);endfor(i=1:m)dpsi=dpsi+(sigma*gi(i)-lambda(i))*dgi(:,i);end function [x,val,k]=bfgs(fun,gfun,x0,varargin)%功能:用BFGS算法求解无约束问题:min f(x)% 输入 : x0 是初始点 , fun, gfun 分别是目标函数及其梯度 ;% varargin 是输入的可变参数变量 , 简单调用 bfgs 时可以忽略它% 但若其它程序循环调用该程序时将发挥重要的作用%输出:X, val分别是近似最优点和最优值,k是迭代次数maxk=500; % 给出最大迭代次数rho=0.55;sigma=0.4; epsilon=1e-5;k=0; n=length(X0);Bk=eye(n); %Bk=feval('Hess',X0);while(k.maXk)gk=feval(gfun,X0,varargin{:}); % 计算梯度if(norm(gk).epsilon), break; end % 检验终止准则 dk=-Bk “gk; % 解方程组 , 计算搜索方向 m=0; mk=0;while(m.20) % 用 Armijo 搜索求步长n ewf=feval(fu n, x0+rho A m*dk,vararg in {:});oldf=feval(fun,X0,varargin{:}); if(newf.oldf+sigma*rhoAm*gk'*dk) mk=m; break;endm=m+1;end%BFGS 校正x=x0+rhoAmk*dk;sk=x-x0; yk=feval(gfun,x,varargin{:})-gk;if(yk ' *sk.0)Bk=Bk-(Bk*sk*sk'*Bk)/(sk'*Bk*sk)+(yk*yk')/(yk'*sk);endk=k+1; x0=x;endval=feval(fun,x0,varargin{:});。