用Vx Works的信号量机制实现任务同步
信号量在进程同步中的应用及实现
解决进程同步 问题 的算法构架 如下 :
到其他合作进程发 来的消息 之前则阻 与 进程 的互斥 不 同 , 进程 同步时 的信
塞 自己, 直到其他合作进程 给出协调信 号 量 只 与 制 约进 程 及 被制 约 进 程 有
其 号后被唤醒而继续执行 。 进程之间的这 关 而不 是与整 组并 发进 程有 关 , 称
种相互合作等 待对 方消息 的协 调关系 之 为私有 信号量 。 私有 信号量 赋初 为
学 术 纵 横
FZA ・UsU0G EG AHNX EH ZNH N
信号量在进程同步中的应用及实现
口 逯 广 义
摘
要: 本文在阐述进程 同步基本 创建 的先后次序也都是不确定的 , 这就 互 斥信 号量 与所有 的并 发进 程有 关 , 个合作进程到达协调点后 , 在没有得 了公有 资 源 的数 量 ,初值 通 常 为 1 。
一
其二 : 由于进 程访问临界资 源 概念。进程就是进程实体的运行过程 , 值 只能由定义 在信号量上 的 P操 作原 对 出现 ;
而 界区 , 任何时刻只能 是系统进行 资源分配和调度 的一个独 语 和 V操 作原语来 改变 , Q是 个初 的那段资源称为I 所以在 立单位。 进程具有异 步性 即进程按各 自 始状 态为空 的队列 ,即信号量表 示某 有一个 进程进入 自己的临界 区。 独立的、不可预知的速度 向前推进 , 在 类 资源实体与进程 队列 有关 的整 形变 每个进程进 入临界 区之前 调用 P操作 争用临界资源时会 给系统造成混乱 , 于 量 。 根 据 进 程 是引入进程 同步 , 进程同步的主要任务 的制 约关 系信
一
w i s w i s= on- p a (): he < d o o ; t
VxWorks操作系统基础(适合初学者阅读)2024新版

系统库(System Library)
提供一系列操作系统服务,如文件操作、网络协议栈等。
驱动程序(Device Drivers)
与硬件设备交互,实现对硬件设备的控制和管理。
内核组成及作用
内核组成及作用
01
内核的主要作用包括
02 管理系统资源,如CPU、内存、I/O设备等 。
06
VxWorks文件系统操作指南
文件系统类型及特点介绍
RAM-based File System
基于RAM的文件系统,读写速度快,但数据在 关机后丢失。
TrueFFS
Wind River特有的闪存文件系统,提供磨损均 衡和掉电保护功能。
ABCD
DOS File System (dosFs)
兼容MS-DOS的文件系统,支持FAT12、FAT16 和FAT32格式。
01
VxWorks操作系统概述
VxWorks操作系统定义
VxWorks是一款由美国风河公司( Wind River)开发的嵌入式实时操 作系统(RTOS),专为需要实时响 应和高可靠性的应用而设计。
VxWorks提供了丰富的中间件和开发 工具,支持多种处理器架构和硬件平 台,广泛应用于航空、航天、通信、 医疗、工业自动化等领域。
在ISR中处理完中断事件后, 需要及时清除中断标志,避 免重复处理。
中断优先级设置和嵌套处理
01
VxWorks支持多级中断优先级,高优先级的中断可以打断低优先 级的中断处理。
02
中断优先级可以通过配置文件或动态调整进行设置,以满 足不同应用场景的需求。
03
在处理中断时,如果发生更高优先级的中断请求, VxWorks会自动保存当前中断的上下文信息,并跳转到更 高优先级的中断处理程序中。处理完成后,再恢复之前中 断的上下文信息并继续执行。这种机制称为中断嵌套处理 。
基于嵌入式操作系统VxWorks的多任务并发程序设计(6)

基于嵌入式操作系统VxWorks 的多任务并发程序设计的多任务并发程序设计((6)――――综合实例综合实例作者作者::宋宝华 e e--mail:21cnbao@这一次连载我们将给出一个综合的实例,系统地用到连载1~5中所学的知识。
13 系统描述假设我们面对这样的一个通信控制系统,它由三大部分组成:运行于PC 机Windows 操作系统上的人机界面程序、运行于RISC 结构通用处理器上的VxWorks 操作系统和运行于数字信号处理(DSP )处理器上的波形处理软件。
RISC 处理器和DSP 都存在于目标电路板上,是一个典型的嵌入式系统硬件平台。
在Windows 的人机界面上我们可以编辑一些信息,经过TCP/IP 协议栈传递给VxWorks 操作系统,VxWorks 再控制DSP 将这些信息经过数字调制之后发送出去。
VxWorks 与DSP 通过共享内存(硬件意义上的同一片内存,即同一存储芯片的相同存储空间)通信。
系统整体框架如下图:上述框架来源于一个真实的开发项目,限于技术保密的原因,笔者不能透露其细节。
但是从上述简单描述中,我们应该大概已知道该系统的功能。
其实,这样的系统非常常见,是一种较通用的软硬件架构方式。
14 任务控制与调度整个VxWorks 上的波形控制模块需要运行如下几个并发的用户任务: // VxWorks 与DSP 之间的数据传递(1)SendDatatoDSP:VxWorks发送数据到DSP;(2)RecvDataFromDSP:VxWorks从DSP接收数据;// VxWorks与DSP之间的通信控制(硬件查询方式)(3)IsDspDataCome:查询DSP是否有数据向VxWorks传送;(4)IsDspReqData:查询DSP是否向VxWorks及上层请求报文;// VxWorks与Windows的数据传递(5)SendDataToWin:通过socket(基于UDP协议)向Windows上传报文;(6)RecvDataFromWin:接收来自Windows的通过socket(基于UDP协议)下传的报文。
vxworks系统及函数详解

VxWork介绍及编程VxWork介绍及编程一.嵌入式操作系统VxWorks简介VxWorks操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统(RTOS),是嵌入式开发环境的关键组成部分。
良好的持续发展能力、高性能的内核以及友好的用户开发环境,在嵌入式实时操作系统领域占据一席之地。
它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在美国的F-16、FA-18 战斗机、B-2 隐形轰炸机和爱国者导弹上,甚至连1997年4月在火星表面登陆的火星探测器上也使用到了VxWorks。
实时操作系统和分时操作系统的区别从操作系统能否满足实时性要求来区分,可把操作系统分成分时操作系统和实时操作系统。
分时操作系统按照相等的时间片调度进程轮流运行,分时操作系统由调度程序自动计算进程的优先级,而不是由用户控制进程的优先级。
这样的系统无法实时响应外部异步事件。
实时操作系统能够在限定的时间内执行完所规定的功能,并能在限定的时间内对外部的异步事件作出响应。
分时系统主要应用于科学计算和一般实时性要求不高的场合。
实时性系统主要应用于过程控制、数据采集、通信、多媒体信息处理等对时间敏感的场合。
VxWorks的特点•可靠性操作系统的用户希望在一个工作稳定,可以信赖的环境中工作,所以操作系统的可靠性是用户首先要考虑的问题。
而稳定、可靠一直是VxWorks的一个突出优点。
自从对中国的销售解禁以来,VxWorks以其良好的可靠性在中国赢得了越来越多的用户。
•实时性实时性是指能够在限定时间内执行完规定的功能并对外部的异步事件作出响应的能力。
实时性的强弱是以完成规定功能和作出响应时间的长短来衡量的。
VxWorks 的实时性做得非常好,其系统本身的开销很小,进程调度、进程间通信、中断处理等系统公用程序精练而有效,它们造成的延迟很短。
vxWorks多任务编程初探(转)

vxWorks多任务编程初探(转)进程(Process)是具有一定独立功能的程序关于某个数据集合上的一次运行活动,是系统进行资源分配和调度的一个独立单位。
程序只是一组指令的有序集合,它本身没有任何运行的含义,只是一个静态实体。
而进程则不同,它是程序在某个数据集上的执行,是一个动态实体。
它因创建而产生,因调度而运行,因等待资源或事件而被处于等待状态,因完成任务而被撤消,反映了一个程序在一定的数据集上运行的全部动态过程。
线程(Thread)是进程的一个实体,是CPU调度和分派的基本单位。
线程不能够独立执行,必须依存在应用程序中,由应用程序提供多个线程执行控制。
线程和进程的关系是:线程是属于进程的,线程运行在进程空间内,同一进程所产生的线程共享同一内存空间,当进程退出时该进程所产生的线程都会被强制退出并清除。
线程可与属于同一进程的其它线程共享进程所拥有的全部资源,但是其本身基本上不拥有系统资源,只拥有一点在运行中必不可少的信息(如程序计数器、一组寄存器和栈)。
根据进程与线程的设置,操作系统大致分为如下类型:1、单进程、单线程:MS-DOS大致是这种操作系统;2、多进程、单线程:多数UNIX(及类Unix的Linux)是这种操作系统;3、多进程、多线程:Windows NT(以及基于NT内核的Windows 2000、XP等)、Solaris 2.x和OS/2都是这种操作系统;4、单进程、多线程:vxWorks就是这种操作系统。
vxWorks只有一个进程(内存空间和资源分配),其任务的概念与线程大致相当,所有任务之间共享内存和其它资源。
vxWorks由一个体积很小的内核及一些可以根据需要进行定制的系统模块组成。
vxWorks 内核最小为8KB,即便加上其它必要模块,所占用的空间也很小,且不失其实时、多任务的系统特征。
vxWorks的内核主要包括:1、多任务:为满足真实世界事件的异步性,现代操作系统需提供多任务支持,由系统内核分配CPU给多个任务并发执行。
vxworks使用过程中的100个疑问与解答

vxworks使用过程中的100个疑问与解答1. VxWorks是什么?VxWorks是一种实时操作系统(RTOS),由美国Wind River公司开发,适用于嵌入式系统。
2. VxWorks有哪些特点?VxWorks具有高度可靠性、实时性、可移植性和可扩展性等特点。
3.如何安装VxWorks?安装VxWorks需要下载安装包,然后按照安装指南进行安装。
4.如何创建VxWorks任务?可以使用taskSpawn函数来创建任务,指定任务的入口函数、优先级等参数。
5. VxWorks如何进行任务间通信?任务间可以使用消息队列、信号量、共享内存等机制进行通信。
6.如何调试VxWorks程序?可以使用Wind River公司的调试工具Wind River Workbench进行调试。
7. VxWorks支持哪些开发语言?VxWorks主要支持C和C++开发,也可以使用汇编语言和Java等。
8.如何加载和运行VxWorks程序?VxWorks程序可以通过TFTP、FTP等网络协议加载到目标设备上,然后使用命令运行。
9. VxWorks是否支持多任务?是的,VxWorks支持多个任务的同时运行,并通过任务调度器进行任务切换。
10.如何实现任务间的同步?可以使用信号量、事件标志等机制实现任务间的同步。
11. VxWorks中如何实现中断处理?VxWorks提供了中断服务例程(ISR)和处理器驱动程序(DPC)来处理中断。
12.如何列出VxWorks系统中的任务?可使用taskShow命令列出系统中所有任务的详细信息。
13.如何获取任务的优先级?可以使用taskPriorityGet命令获取任务的优先级。
14.如何设置任务的优先级?可以使用taskPrioritySet命令设置任务的优先级。
15.如何控制任务的时间片轮转?可以使用taskDelay命令来控制任务的时间片轮转。
16.如何查看VxWorks系统的中断信息?可以使用intShow命令来查看系统中的中断信息。
VxWorks编程常用函数说明

taskSend() { if (OK != msgQSend(msgQID, "A", 1, NO_WAIT, MSG_PRI_NORMAL)) { printf("Message send failed!"); } }
if (select(width, &readFds, NULL, NULL, NULL) == ERROR) { /*监听*/ close(fds[0]); ... ...; close(fds[3]); return; } for(i=0; i if (FD_ISSET(fds[i], &readFds)) { ... ...; /* 进行读写操作 */
Init() { /* 创建管道 */
if (pipeDevCreate("/pipe/mypipe", 8, 1) != OK) { printf("/pipe/mypipe create fialed!\n"); } /* 创建互斥信号量 */ if ((semMID = semMCreate(SEM_Q_FIFO)) == NULL) { printf("Mutex semaphore create failed!\n"); } }
taskReceive() { uchar_t ch; msgQReceive(msgQID, &ch, 1, WAIT_FOREVER); /* 这里任务会阻塞 */ printf("Received from msgq: %c ", ch); }
VxWorks之认识(转)
VxWorks之认识(转)Tornado是WindRiver公司开发的用于嵌入式开发的一组产品,它包括32位实时操作系统VxWorks,集成开发环境(IDE,包括编译器等)。
下面是我阅读完VxWorks相关文档后的一些个人认识。
一.VxWorks操作系统VxWorks时实时多任务的嵌入式操作系统,它主要包括任务调度、I/O功能、文件系统、中断管理、内存管理、网络功能、内存管理、BSP(系统启动模块)等。
它的多任务的实现是由中断驱动的,即在每个系统时钟中断中,实现任务的调度。
VxWorks中的任务有优先级的概念。
与其它嵌入式操作系统相比,它有如下优点:1.任务之间的切换快,任务间通信手段多样;2.中断响应的延时短;3.内存管理安全:VxWorks把内存分成很多区域,包括内核区、用户区,并且采用虚拟内存管理的方法,这样大大提高了系统的安全性,并且增加了堆栈溢出的判断;4. I/O功能丰富,硬件驱动全面;5.文件系统强大;6.网络功能全面;7.对任务的实时监控;8. BSP(启动模块)的支持;9.多CPU的支持;10.系统各模块是单独的库,可以根据需要加载。
下面就详细讲述各部分内容。
1.多任务功能:VxWorks的任务有优先级的概念,其任务调度也是基于优先级考虑的,是抢占式的,VxWorks的任务有256个等级,0—255,数目越小表示优先级越高。
高优先级的任务可以打断低优先级的任务而抢先执行,只有在高优先级的任务执行完后,低优先级的任务才可以执行。
其调度算法有两种:完全抢占式的和循环分配式的。
完全抢占式的是除了高优先级任务可以打断低优先级任务外,在相同优先级的任务之间,不可以相互打断,并且同优先级任务不是同时执行的,只有等该任务执行完后,与其相同优先级的任务才可以执行;循环分配式除了具有抢占功能之外,相同优先级的任务是可以同时执行的,即系统时间片是在它们之间平均分配的,这样,相同优先级的任务可以同时执行。
VxWorks中信号量实现任务间通信同步与互斥,代码

VxWorks信号量是提供任务间通信、同步和互斥的最优选择,提供任务间最快速的通信。
也是提供任务间同步和互斥的主要手段。
VxWorks提供3种信号量来解决不同的问题。
二进制信号量是最快的最常用的信号量,可用于同步或互斥。
互斥为了解决内在的互斥问题、优先级继承、删除安全和递归等情况而最优化的特殊的二进制信号量。
计数器类似于二进制信号量,但是随信号量释放的次数改变而改变。
二进制信号量semBCreate (SEM_Q_FIFO/SEM_Q_PRIORITY , SEM_EMPTY/SEM_F ULL)有两个作用:(1)任务间的互斥--同一个任务获取和释放信号量,防止两个任务同时存取一个资源(2)任务间的同步--一个任务获取信号量,另一个任务(或者中断)释放信号量二进制信号量实现互斥使用二进制信号量可以很方便的实现互斥,互斥是指多任务在访问临界资源时具有排他性。
为了使多个任务互斥访问临界资源,只需要为该资源设置一个信号量,相当于一个令牌,那个任务拿到令牌即有权使用该资源。
把信号量设置为可用,然后把需要的资源的任务的临界代码置于semTake()和semGive()之间即可。
注明:1、互斥中的信号量与任务优先级的关系:任务的调度还是按照任务优先级进行,但是在使用临界资源的时候只有一个任务获得信号量,也就是说还是按照任务优先级获得信号量从而访问资源。
只是当前使用资源的任务释放信号量semGive(),其它任务按照优先级获得信号量。
2、信号量属性中的参数为:SEM_Q_PRIORITY。
而且在创建信号量的时候必须把信号量置为满SEM_FULL。
即信号量可用。
基本实现互斥模型:SEM_ID semMutex;semMutex = semBCreate(SEM_Q_PRIORITY, SEM_FULL);task(void){semTake(semMutex, W AIT_FOREVER);//得到信号量,即相当于得到使用资源的令牌//临界区,某一个时刻只能由一个任务访问semGive(semMutex);}二进制信号量实现同步同步即任务按照一定的顺序先后执行,为了实现任务A和B同步,只需要让任务A和B共享一个信号量,并设置初始值为空,即不可用,将semGive()置于任务A之后,而在任务B 之前插入semTake()即可。
基于嵌入式操作系统VxWorks的多任务并发程序设计(4)

7.任务间通信 7.1 信号量
VxWorks 主要提供如下 API 进行信号量的创建、获取和释放: (1)semBCreate( ):分配并初始化一个二进制信号量,函数原型为: SEM_ID semBCreate ( int options, /*信号量选项*/ SEM_B_STATE initialState /*信号量初始化状态值*/ ); (2)semMCreate( ):分配并初始化一个互斥信号量,函数原型为: SEM_ID semBCreate ( int options, /*信号量选项*/ SEM_B_STATE initialState /*信号量初始化状态值*/ ); (3)semCCreate( ):分配并初始化一个计数信号量,函数原型为: SEM_ID semCCreate ( int options, /*信号量选项*/ int initialCount /*信号量初始计数值*/ ); 当一个信号量被创建时,它的队列(queue)类型需要被确定。等待信号量的任 务队列可以以优先级顺序 (SEM_Q_FIFO)排列。 (4)semDelete( ):删除一个自由的信号量,函数原型为: STATUS semDelete ( SEM_ID semId /*要删除的信号量 ID 号*/ ); (5)semTake( ):占有一个信号量,函数原型为: STATUS semTake ( SEM_ID semId /*所要得到的信号量 ID 号*/ int timeout /*等待时间*/ ); (SEM_Q_PRIORITY) 或 者 先 到 先 得 方 式
(6)semGive( ):释放一个信号量,函数原型为: STATUS semGive ( SEM_ID semId /*所给出的信号量 ID 号*/ ); (7)semFlush( ):解锁所有等待信号量的任务,函数原型为: STATUS semFlush ( SEM_ID semId /*要解锁的信号量 ID 号*/ ); 7.1.1 二进制信号量 例 1:二进制信号量 /* includes */ #include "vxWorks.h" #include "taskLib.h" #include "semLib.h" #include "stdio.h" /* function prototypes */ void taskOne(void); void taskTwo(void); /* globals */ #define ITER 10 SEM_ID semBinary; int global = 0; void binary(void) { int taskIdOne, taskIdTwo; /* create semaphore with semaphore available and queue tasks on FIFO basis */ semBinary = semBCreate(SEM_Q_FIFO, SEM_FULL); /* Note 1: lock the semaphore for scheduling purposes */ semTake(semBinary, WAIT_FOREVER); /* spawn the two tasks */ taskIdOne = taskSpawn("t1", 90, 0x100, 2000, (FUNCPTR)taskOne, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0); taskIdTwo = taskSpawn("t2", 90, 0x100, 2000, (FUNCPTR)taskTwo, 0, 0, 0, 0,
vxworks实时多任务程序设计.pdf

3 任务合并 .
利用任务的共同特征进行适当的任务合并 , 可以 简化系统任务模型、 减小系统复杂度、 消除某些任务 的切换开销从而减少系统的总体开销。任务合并可 分为: 根据时间一致合并 , ① 将同一事件激活的优先 级相同的函数合并在 1 个任务 中; 根据控制一致 ② 合并 , 1 将 个控制结构驱动的所有函数组合在 1 个任 务中; 根据函数一致合并 , ③ 将几个使用相同数据的 函数合并, 使原来共享的数据成为任务内的局部数 据, 从而减少互斥。
本系统运行于 V ME总线系统( ME 7) MV 17上,
通过 V ME背板总线与各模件交换数据对各处理模
系 具 优 的 术 吟 丰 的 用 件 持、 统,有 越 技 性 富 应 软 支 良
好的技术服务和可靠的系统稳定性。 V Wok 的主要性能特点有 : x rs ()高度可剪裁的微内核结构。V Wok 所需 1 x rs
的, Q I 与P SX进程级的调度策略不同, 即整个系统里
要么是优先级抢先调度, 要么是时间片轮转调度; 而 P SX标准下可以每个进程使用 自己的调度策略。 OI 系统共有 26 5 个优先级。 优先级抢先调度指的是一个优先级较低的任务 正在执行中, 另一个优先级高的任务进人就绪状态, 则马上进行处理器抢先, 执行高优先级任务, 直到高 优先级释放处理器( 完成、 、 挂起 阻塞等) 才继续执行 低优先级任务。 优先级抢先调度可以保证实时系统的迅速响应 特性, 但是也带来 1 个问题 : 当系统中存在几个相同 优先级的任务时, 就会使单一任务独占处理器, 直至 完成。为此加人了基于优先级的时间片轮转调度方 式。在不同优先级的任务间以抢先方式调度, 相同优 先级的任务则以时间片进行轮转。 () 3 存储管理 在基本的 i wn d内核中, 任务直接操作线性物理 内存, 不存在虚拟存储等复杂的存储管理策略, 这主 要是从性能来考虑的。不过 V Wok 也提供支持 x rs P SX标准的虚拟存储区和共享内存 ( OI 多处理器间 共享) 组件。 () 4 任务间通信
VxWorks操作系统概述
VxWorks操作系统概述(1) 无忧电子开发网VxWorks操作系统概述(1)1. VxWorks操作系统概述1.1. VxWorks 操作系统简介实时多任务操作系统是能在确定的时间内执行其功能,并对外部的异步事件作出响应的计算机系统。
多任务环境允许一个实时应用作为一系列独立任务来运行,各任务有各自的线程和系统资源。
VxWorks系统提供多处理器间和任务间高效的信号灯、消息队列、管道、网络透明的套接字。
实时系统的另一关键特性是硬件中断处理。
为了获得最快速可靠的中断响应,VxWorks系统的中断服务程序ISR有自己的上下文。
VxWorks实时操作系统由400多个相对独立的、短小精炼的目标模块组成,用户可根据需要选择适当模块来裁剪和配置系统,这有效地保证了系统的安全性和可靠性。
系统的链接器可按应用的需要自动链接一些目标模块。
这样,通过目标模块之间的按需组合,可得到许多满足功能需求的应用。
VxWorks操作系统的基本构成模块包括以下部分:·高效的实时内核WindVxWOrks实时内核(Wind)主要包括基于优先级的任务调度、任务同步和通信、中断处理、定时器和内存管理。
·兼容实时系统标准POSIXVxWOrks提供接口来支持实时系统标准P.1003.1b.·I/O系统VxWOrks提供快速灵活的与ANSI-C相兼容的I/O系统,包括UNIX的缓冲I/O和实时系统标准POSIX的异步I/O。
VxWOrks包括以下驱动:网络 --- 网络设备(以太网、共享内存)管道 --- 任务间通信RAM --- 驻留内存文件SCSI --- SCSI硬盘,磁碟,磁带键盘 --- PC x86键盘(BSP仅支持x86)显示器 --- PC x86显示器(BSP仅支持x86)磁碟 --- IDE和软盘(BSP仅支持x86)并口 --- PC格式的目标硬件·本机文件系统·I/O系统VxWorks的文件系统与MS-DOS、RT-11、RAM、SCSI等相兼容。
仿真培训软件vxots介绍及应用(初级)方向实践试题

仿真培训软件vxots介绍及应用(初级)方向实践
试题
以下是仿真培训软件VxWorks的介绍及其在初级应用方向的实践试题:
1.VxWorks简介:VxWorks是一款实时操作系统(RTOS),广泛应用于航空、航天、工业控制等领域。
它具有实时性、稳定性、可靠性高等特点,可支持多种处理器和硬件平台。
VxWorks提供了丰富的中间件和开发工具,方便开发者快速构建实时应用程序。
2.实践试题:
任务1:了解VxWorks系统组成和特点,思考VxWorks 在实时系统开发中的优势和局限性。
任务2:安装VxWorks开发环境,配置开发环境变量。
任务3:创建一个简单的VxWorks任务,实现两个整数相加的功能。
要求任务能够接收输入参数,并在任务完成后返回结果。
任务4:使用VxWorks提供的消息队列实现两个任务之间的通信。
其中一个任务发送一个整数,另一个任务接收并打印该整数。
任务5:使用VxWorks提供的信号量实现两个任务间的同步。
确保一个任务等待另一个任务完成某项工作后再继
续执行。
以上仅为基本示例,根据实际应用场景和需求,可进行深入的学习和探索。
更多内容建议查阅VxWorks开发教程和相关论坛。
VxWorks操作系统简介

通信机制——消息队列和管道
单处理器中任务间消息的传送采用消息队列 管道是一个虚拟的IO设备,是建立在消息队列上的,采用 标准的IO接口,能调用标准的I/O函数,进行管道打开、读 入和写入等操作。 消息队列和管道都会提供先入先出的缓冲(FIFO)以及同 步和互斥机制。 用于单个处理器中任务间的通讯,也可用于ISR与任务间的 通讯
Slip / PPP
内存管理
平坦模式(Flat Mode)
为什么不是段页式的管理? 页式管理要有程序-内存的映射, 严重影响实时性
VxWorks系统支持静态分配和 动态分配相合的内存分配
低端内存区和VxWorks区采用静态 分配,而保证VxWorks的实时性和 稳定性。
内存分配采用first-fit算法 当增加硬件内存时,需要修改 sysPhysMemTop( ) (或调整 LOCAL_MEM_SIZE)
任务结构——任务控制块(TCB)
任务控制块用来描述一个任务,每一任务都与一 个TCB关联。
任务控制块里面包含了:当前状态、优先级、要等 待的事件或资源、任务程序码的起始地址、初始堆 栈指针
任务的“上下文”(context)。任务的上下文就 是当一个执行中的任务被停止时,所要保存的所 有信息。通常,上下文就是计算机当前的状态, 也即各个寄存器的内容。
基于VxWorks的多任务实时性分析

基于VxWorks的多任务实时性分析张宇;王省书;胡春生【摘要】为了分析VxWorks操作系统在多任务环境下任务切换的实时性,运用时间戳方法对任务抢占切换时间进行了测量,并通过数据定量分析了任务数量对任务切换时间的影响.同时为了加强任务控制,使用信号量通信机制,设计任务间通信控制程序,并对信号量的实时性影响进行了测量与分析.结果表明任务数量和信号量机制对切换时间有一定影响,但增加的延迟时间非常小.%In order to analyze the real - time characteristics of multi - task of the system based on VxWorks, a method is designed to measure the task switching time. By measurement date, the task switching time influenced on multi - task is analyzed. As well as, taking advantage of semaphores task communication mechanism, program is given to aim at controlling multi - task. Then the real - time characteristics of semaphores is measured and analyzed. Theresult'indicates that the quantity of tasks and semaphores mechanism have a certain influence on the task switching time, but the added delay time is very short.【期刊名称】《微处理机》【年(卷),期】2013(034)001【总页数】5页(P53-57)【关键词】VxWorks系统;实时操作系统;任务调度机制;任务通信【作者】张宇;王省书;胡春生【作者单位】国防科学技术大学光电科学与工程学院,长沙410073【正文语种】中文【中图分类】TP316.21 引言VxWorks操作系统是由美国Wind River System公司推出的一款嵌入式实时操作系统。
VxWorks
V Wo s x r 操作系统 k
Vx r s操 作系统 包括了进程管理 、存储管理 蹬备 Wok 管 理 、文 件 系统管 理 、 网络 协 议 及 系统 应用 等 几个 部分 。
Vx r s Wok 只需很小 的存储 空间 , 并可 高度裁剪 , 保证 了系统 能以较高的效率运行 。Vx r s 要 由 下几个部分组成 。 Wo k 主
2 /0 系统 .1
V Wok 提供 了一个快 速灵活 、与 ANS x s c Ic兼容的 I 0 / 系统 .包括 UNI 标准 的缓 冲 I 0和 P S X标准 的异步 X / OI IO / vx rs包括以下驱动程序 :网络 驱动、管道驱动 、 wok
RA 盘 驱 动 、 C I 动 、键 盘 驱 动 、显 示 驱 动 磁盘 驱 动 、 M S S驱
括几种支持使 用块设备 的本地文件 系统 这些 设备都使 用一
个标准的接 口从而使得文件 系统能 够被 灵活地在设备驱动程 序上移 植。另外 , Wok Vx r s也支持 S S 磁带设备的本地文 C I 件 系统 .~ Wo k / x r sI 0体 系结构甚至还支持在一个单独的 Vx r s Wok 系统 上同时并存 几个不 同的文件系统 。Vx r s Wo k 支持 d s  ̄ t I s rwF 和 tp F 四种文件系统 o F; lF a s a e s 、r
求,进行 资源管理 、消 息管理 、任务调 度、异常处理等工作。
应当根据优先级的高低对任务进行切换 , 只有优先服务方式的
井 口驱动警 3 .文 件系统 V Wl k J x ls r i  ̄供的快速文件 系统适合于实时 系统应用 , 包
R S TO 才是真正 的实时操 作系统 , 时间分片方式和协作方式的
如何在VxWorks下实现SNTP同步对时功能
1 前言S N T P是简单网络时间协议(S i m p l e Network Time Protocol)的简称,是由网络时间协议NTP(Network Time Protocol)简化而来,是一种使Internet上的计算机保持时间同步的一种通信协议,可通过提供完全的机制来访问国际标准时间,广泛用于需要精确时间同步的场合。
VxWorks嵌入式实时操作系统的网络组件(network components)支持SNTP网络对时协议,用户要在该系统下实现SNTP对时功能,并不需要关心协议本身,只需把SNT P客户端和SNT P服务器端这两个组件分别包括进来,再调用相应的V x W o r k s AP I函数,即可分别实现SNT P客户端和服务器端的对时功能。
2 SNTP服务器的实现SNTP服务器端有两种工作模式,主动模式(S N T P_A C T I V E)和被动模式(SNTP_PASSIVE),VxWorks操作系统启动时会自动调用SNTP初始化函数sntpsInit( ),设置服务器的工作模式(SNTPS_MODE)、广播时间间隔(S NTP S_IN TER VAL)、目标IP地址(SNTPS_D STADDR)和SNTP端口号(SN T P_PO R T)等。
如果服务器工作模式选为被动模式(SNTP_PASSIVE),则服务器将等待来自客户端的请求,并发送包含NT P时间戳的回应帧。
如果选择主动模式(SNTP_ACTIVE),则服务器端在固定的时间间隔周期性的发送N T P时间戳信息。
当采用主动模式时,SNTP服务器根据SNTPS_DSTADDR 和 SNTPS_INTERVAL的值来决定目标的IP地址和广播的时间间隔。
默认情况下,服务器每隔64秒广播发送一次时间戳信息。
S N T P S_D S T A D D R和SNTPS_INTERVAL的值可以通过sntpsConfi gSet()函数来进行设置。
使用信号量实现进程间同步

使⽤信号量实现进程间同步1、进程a ;完成信号量的创建和设置;做定时器,每1s sem_post 信号量⼀次;1 #include <stdio.h>2 #include <fcntl.h>3 #include <stdlib.h>4 #include <unistd.h>5 #include <semaphore.h>67//利⽤select函数完成⼀个定时器的功能;8void setTimer(int seconds, int microseconds)9 {10struct timeval temp;11 _sec = seconds;12 _usec = microseconds;13select(0, NULL, NULL, NULL, &temp);14return ;15 }1617int main()18 {19 sem_t* a;20int er=0;2122 sem_unlink("share_data"); //若内存中已经存在名为“sem_test”的信号量,则将其删除;2324// 创建⼀个名为"sem_test"的信号量,并将其值初始化为1,a为sem_t型指针,指向该信号量;25 a=sem_open("share_data", O_CREAT ,(S_IRUSR | S_IWUSR | S_IRGRP | S_IROTH), 1);26if(NULL==a)27 {28 printf("sem_open failure!\n");29 }3031//将该信号量赋为1,且为进程间共享型信号量;32 sem_init(a,1,0);3334//获取当前信号量的值;35 sem_getvalue(a, &er);36while(1)37 {38if(er==0)39 {40 sem_post(a);41 }42 setTimer(1,0);43 sem_getvalue(a, &er);44 printf("%d\n",er);45 }46return0;47 }2:进程b;当信号量被 a 进程进⾏sem_post后,进程b由阻塞态变为可执⾏;1/*2 ============================================================================3 Name : share_data_a.c4 Author :5 Version :6 Copyright : Your copyright notice7 Description : Hello World in C, Ansi-style8 ============================================================================9*/1011 #include <stdio.h>12 #include <fcntl.h>13 #include <stdlib.h>14 #include <unistd.h>15 #include <semaphore.h>1617int main()18 {19 sem_t* a;2021//sem_open()函数第2个参数为0,表⽰打开已存在的名为"share_data"的信号量;2223 a=sem_open("share_data", 0, (S_IRUSR | S_IWUSR | S_IRGRP | S_IROTH), 1); 2425if(NULL==a)26 {27 printf("sem_open failure!\n");28 }29int i=0,er;30while(1)31 {32 sem_wait(a); //当进程 a 完成sem_post动作时,该进程开始继续执⾏;33 printf("i = %d\n",i++);34 }35return0;36 }。
service层加同步方法

service层加同步方法Service层是业务逻辑处理的核心组件之一,负责处理各种业务逻辑和业务流程。
在实际开发中,有时候需要在Service层中使用同步方法来确保线程安全和数据完整性。
本文将深入讨论Service层的同步方法,包括其作用、使用场景以及如何实现。
1.同步方法的作用同步方法是为了确保线程安全和数据完整性。
在多线程环境下,如果多个线程同时访问一个共享的资源,就可能会出现数据不一致或者数据损坏的问题。
使用同步方法可以避免这些问题,确保只有一个线程能够访问共享资源,其他线程需要等待。
2.使用场景(1)多个线程修改同一个数据:如果多个线程需要同时修改同一个数据,就需要用同步方法来控制对该数据的访问。
例如,一个在线购物系统中,多个用户同时购买同一种商品,需要保证每个用户购买数量的准确性。
(2)多个线程读取和写入同一个数据:如果多个线程需要同时读取和写入同一个数据,也需要使用同步方法来确保数据的一致性。
例如,一个音乐播放器的播放列表,多个线程同时读取和修改该列表,需要保证每个线程读取到的列表都是最新的。
3.实现同步方法实现同步方法的方式有多种,下面介绍两种常用的方式:(1)使用synchronized关键字:在方法声明中添加synchronized关键字,表示该方法是同步方法。
只有获得了对象的锁的线程才能够执行这个方法,其他线程需要等待。
例如:```javapublic synchronized void updateOrder(Order order)//执行更新订单操作```(2)使用Lock对象:Lock是Java中提供的另一种用于实现同步的方式,它比synchronized更加灵活。
首先需要创建一个Lock对象,然后在方法中使用lock(方法获取锁,在操作完成后使用unlock(方法释放锁。
例如:```javaprivate Lock lock = new ReentrantLock(;public void updateOrder(Order order)lock.lock(;try//执行更新订单操作} finallylock.unlock(;}```4.同步方法带来的性能问题虽然同步方法确保了线程安全,但是它也会带来一些性能问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用其信号量机制 ,可以很好地满足某数据采集系统对数 据共享的要求 。
在使用二进制信号量时 ,要注意以下几点 : (1) 用途不同 ,信号量初始值不同 ; (2) 互斥访问资源时 ,semTake ( ) 和 sem Give ( ) 必须 成对出现 ,且先后顺序不能颠倒 ; (3) 避免删除那些其他任务正在请求的信号量 。
Abstract :Task synchronization for VxWorks to access critical resource mutually is applied. Binary semaphore is an important met hod to re2 alizing synchronization in VxWorks. The result consistent is improved when tasks are executed. The paper introduces binary - semaphore , researches t he techniques of solving mutex and synchronization ,and presents t he program frame in X - data gat hering system ,which use semaphore to control t he data gat hering ,stroing and quering tasks of 8 - receiveing channels sharing t he buffer. Key words :semaphore ;task ;synchronization ;mutex
}
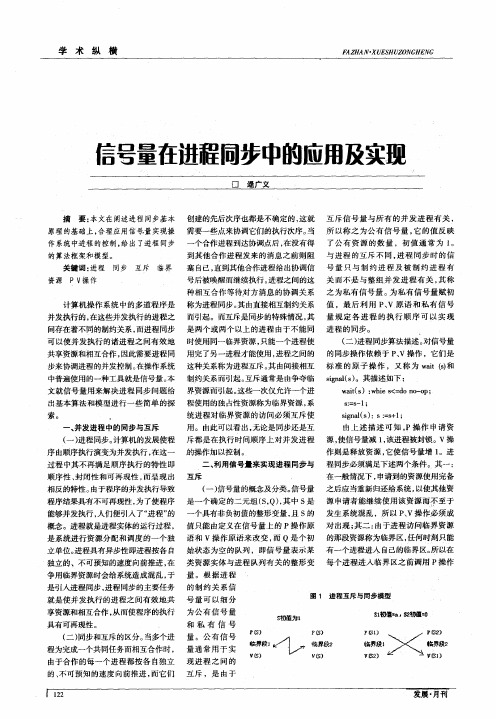
2. 2 实现同步 同步[2 ]是指多任务在执行次序上的协调 ,不会出现与
时间有关的差错 。例如 ,有一输入任务 A 通过单缓冲区 向计算任务 B 提供数据 ,如图 3 所示 。
任务 A → 单缓冲区 →任务 B
图 3 任务 A 和 B 的同步 当缓冲区空时 ,任务 B 因不能获得所需数据而等待 , 当任务 A 把数据送入缓冲区时 ,便应向任务 B 发送一信 号 ,将它唤醒 ;反之 ,当缓冲区满时 ,任务 A 因无法再向缓 冲区中投放数据而等待 ,只有当任务 B 将缓冲区内数据 取走时 ,再向 A 发信号将 A 唤醒 。 为使任务 A 和 B 按顺序执行 ,只需让任务 A 和 B 共 享一个信号量 ,并设其初始值不可用 ,将 sem Give ( ) 置于 任务 A 之后 ,而在任务 B 之前插入 semTake ( ) 即可 。 例如 ,为单缓冲区创建二进制信号量 semSync ,初始 值不可用 :
VxWorks Semaphore Appl ied in Task Synchronization
CON G Wei ,WAN G Yong , YU Hong2kun
( Engineering College ,Airforce University of Engineering ,Xi’an 710038 ,China)
· 4 4 · 微 机 发 展 第 14 卷
2 用二进制信号量实现任务同步 2. 1 实现互斥
互斥[2 ] 是指多任务在访问临界资源时具有排他性 。 为使多个任务能互斥访问临界资源 ,只需为该资源设置一 个信号量 ,并将初始值设为可用 ,然后将诸任务的临界区 代码置于 semTake ( ) 和 Sem Give ( ) 之间即可 。
void Receive - Data () void Translate - Data () void Speed - Sinmulation() { …… {sem Take (semSync) ; {sem Take (semSync) ; ;放数据到缓冲区 ; sem Take (semMu (semSync) ; 数据编译 ;数据查询 } sem Give (semMutex) ; sem Give (semMutex) ; } }
例如 ,为某临界资源创建二进制信号量 semMutex ,初 始值可用 :
SEM - ID semMutex ;
semMutex = semBCreate ( SEM - Q - PRIORI T Y ,SEM - FULL) ;
互斥访问临界资源的任务描述如下 :
task (void) { …… semTake (semMutex ,WAI T - FOREV ER) ; ……;临界区 ,某一时刻只能由一个任务访问 sem Give (semMutex) ; ……
EV ER) ; semGive (semSync) ; …;/ 3 任务 B 取数据 3 / } }
由于 syncSem 的初始值不可用 ,这样 ,若任务 B 先执 行必然阻塞 ,只有在任务 A 执行完 sem Give ( semSync) 操 作后 ,使 semSync 可用 ,任务 B 方能执行 。
第
14 卷 第 7 2004 年 7 月
期
Micro微com p机ute r 发Dev e展lopment
VoJl
. 14 uly
No . 2004
7
用 VxWorks 的信号量机制实现任务同步
丛 伟 ,王 勇 ,于宏坤
(空军工程大学 工程学院 ,陕西 西安 710038)
3 信号量在某数据采集系统中的应用 某数据采集系统中有效地利用了 VxWorks 的信号量
机制 ,实现了 8 个接收通道的数据采集 、数据存储以及数 据查询等任务对缓冲区的共享 ,如图 4 所示 。
图 4 某数据采集系统中多任务共享缓冲区 数据采集任务先将数据放入缓冲区 ,然后数据编译 、 存储 、查询等任务才可以从缓冲区中取数据进行处理 ,所 以对同步的任务 ,一是要保证诸任务的执行顺序 ;二是要 保证数据编译 、存储 、查询等任务互斥地访问缓冲区 。 下面是笔者在开发“某数据采集系统”时用于访问公 共缓冲区的程序框架[3 ] : SEM - ID semMutex ,semSync ; void Task - Define (void) { …… semMutex = semBCreate ( SEM - O - FIFO ,SEM - FULL) ; semSync = semBCreate ( SEM - O - FIFO ,SEM - EMPT Y) ; Task - Receive = taskSpawn ( ……, ( FUNCPTR) Receive - Data , ……) ; Task - Translate = taskSpawn ( ……, ( FUNCPTR) Translate - Da2 ta , ……) ; Task - Simulation1 = taskSpawn ( ……, ( FUNCPTR) Speed - Sim2 ulation , ……) ; …… }
摘 要 :为了保证诸任务对临界 critical 资源 resource 的互斥访问 ,VxWorks 提供了任务同步机制 。二进制信号量是 Vx2 Works 系统中实现任务同步的一种重要手段 ,它保证了任务在并发时结果的一致性 。简要介绍二进制信号量 ,阐述用二进 制信号量解决任务互斥和同步的方法 ,并给出二进制信号量应用在某数据采集系统中的程序框架 。某数据采集系统中有 效地利用了 VxWorks 的信号量机制 ,实现了 8 个接收通道的数据采集 、数据存储以及数据查询等任务对缓冲区的共享 。 关键词 :信号量 ;任务 ;同步 ;互斥 中图分类号 : TP311 . 52 文献标识码 :A 文章编号 :1005 - 3751 (2004) 07 - 0043 - 02
当任务取二进制信号量时要调用 semTake ( ) ,结果取 决于调用时二进制信号量是否可用 。如果可用 ,信号量变 为不可用 ,任务继续执行 ;如果不可用 ,将任务挂起到阻塞
收稿日期 :2003 - 11 - 17 作者简介 :丛 伟 (1973 —) ,女 ,辽宁铁岭人 ,硕士研究生 ,从事机载 计算机软件的教学与研究 。
出版社 ,2003 .
© 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
0 引 言 VxWorks 中的任务 ,改善了资源利用率 ,提高了系统
吞吐量 。为了保证诸任务对临界资源的互斥访问 , Vx2 Works 提供了许多任务同步机制 ,如 :信号量 、禁止中断和 禁止抢占 ,其中信号量是实现任务同步的主要手段 ,也是 解决同步问题的最佳选择 。
在 VxWorks 的 wind 内核中有二进制信号量 、计数信 号量和互斥信号量三种类型 。为了使应用程序具有可移 植性 ,还提供了 POSIX ( 可移植操作系统接口) 信号量 。 所有的这些信号量快速 、高效 ,它们不仅被应用在开发设 计过程中 ,还被广泛地应用在 VxWorks 高层应用系统中 。
SEM - ID semSync ;
semSync = semBCreate ( SEM - Q - FIFO ,SEM - EMPT Y) ;
任务 A 和 B 的执行顺序描述如下 : taskA (void) taskB (void) { { …;/ 3 任务 A 放数据 3 / semTake ( semSync , WAI T - FOR2
参考文献 : [1 ] 孔祥营 ,柏桂枝. 嵌入式实时操作系统 VxWorks 及其开发
环境 Tornado[ M] . 北京 :中国电力出版社 ,2000 . [2 ] 汤子瀛 ,哲凤屏 ,汤小丹. 计算机操作系统[ M ] . 西安 : 西安
电子科技大学出版社 ,2000. [3 ] 罗国庆. VxWorks 与嵌入式软件开发[ M ] . 北京 :机械工业
队列 ,直到该信号量变为可用 。