风管清洁机器人机器人创新设计()
中央空调管道清洁机器人的创新设计
中央空调管道清洁机器人的创新设计摘要:本文主要结合国内外的中央空调机器人的发展,讲述课题的意义和背景,其中重点介绍了中央空调管道机器人采用导向轮制作的行走方案和旋转刷的清扫方案。
同时,针对中央空调管道清洁机器人清洁收尾增加了收集装置。
对重点工作和探讨内容进行归纳总结,并对今后的研究方向做出了展望。
关键词:机械设计;中央空调;机器人;电动机;导向轮一、引言近几年来,中央空调管道的不得当清洗引起了重大关注。
由于中央空调管道设备所占面积较大,长期使用后,细菌灰尘会堆积在空调内部,而随着空调送风系统的运行,会将管道中的细菌和灰尘吹到室内,严重影响到室内空气质量,导致人们呼吸和皮肤时常出现问题。
不仅如此,灰尘的堆积导致散热片堵塞,空调的运转时间及电流成本增加,从而导致空调使用寿命减少,由于楼层结构不同,所安装的空调管道也是纵横交错,并且管道直径也会因为空间大小不同,拐角和衔接扣的清理更是人力短时间不能解决的。
因此,清洁机器人的产生不仅可以更高效地对管道进行清扫、消毒,更能够解决人力清洁所带来的不卫生难题。
因此,采用专用的清洁机器人对中央空调管道进行清洗工作。
我国2004年以来尽管研究的很多,但真正成型投入使用的并不是很多,产品和市场不成熟,而国外的相关产品大多功能单一,智能化水平低,价格又昂贵。
因此国内市场一系列低成本、高效率的机器人相继投入市场。
目前,中央空调机器人的发展趋势将是:增加机器人的适应性,能够运用与多种场景。
中央空调管道清洗机器人技术的成熟和其产品的国产化,会进一步提高我们的物资和文化生活,其研究和发展具有广阔的应用前景、重要的社会意义和经济效益二、工作原理本次设计的机器人主要用于空调管道的清洁,大体由行走机构、清扫装置、控制系统组成。
其中行走机构又包括了驱动机构和导向轮系统两个部分,驱动装置主要采用单电机驱动机器人的前轴,通过对支撑臂上的零件进行调节从而调节导向轮的间距,确保机器人在进入管道以后,两个导向轮两端与管道壁保持大约20mm的距离。
中央空调管道清洁机器人的设计

中央空调管道清洁机器人的设计引言随着中央空调系统在建筑中的应用日益广泛,其管道清洁成为一个重要的问题。
传统的清洁方法需要人工操作,耗时耗力且效率低下。
因此,设计一款中央空调管道清洁机器人成为很有必要的一项工作。
本文将介绍中央空调管道清洁机器人的设计理念、构造、工作原理以及未来发展方向。
设计理念中央空调管道清洁机器人的设计理念是基于自动化清洁的原则。
通过引入先进的传感技术和自主导航系统,实现机器人在管道内的自动运行和清洁,减少人工干预。
构造中央空调管道清洁机器人的构造主要包括机器人主体、传感器系统、清洁装置和控制系统。
机器人主体包括主要的动力系统和机械结构,传感器系统用于感知管道内的环境信息,清洁装置用于清洁管道内的污物,控制系统用于实现机器人运行的控制和协调。
工作原理中央空调管道清洁机器人的工作原理是:首先,通过传感器系统获取管道内的信息,包括管道的尺寸、形状和污物情况。
然后,根据获取的信息制定清洁路径,机器人利用清洁装置对管道内的污物进行清洁。
在整个过程中,控制系统实时监控机器人的运行状态,确保其安全和高效地完成清洁任务。
未来发展方向中央空调管道清洁机器人作为一项新兴技术,仍有许多发展方向。
首先,可以进一步完善传感器系统,提高机器人在管道内的感知能力;其次,可以优化清洁装置,提高清洁效率和效果;最后,还可以研究机器人的自主决策能力,使其更加智能化。
结论中央空调管道清洁机器人的设计是为了解决管道清洁的难题,提高清洁效率和质量。
通过不断的改进和创新,相信这一技术将在未来得到更广泛的应用。
以上是对中央空调管道清洁机器人设计的相关介绍,希望能对相关研究和应用有所帮助。
智能保洁机器人创新设计

智能保洁机器人创新设计摘要保洁机器人是一种配备了微电脑系统的电动保洁设备。
保洁机器人分为两个分类,一种是智能扫地机,一种是智能吸尘器。
智能吸尘器是一种配备了微电脑系统的吸尘器,是靠吸力打扫卫生的,它就是吸尘器的高科技产品,能够按照人们的设置清洁房间的某一特定部分或全部。
随着当今社会经济的发展,人们生活水平的逐渐提高,工作越来越忙,住房面积也越来越大,打扫卫生已成为现代家庭一大难题,要付出大量的劳力,与现代人的居住条件、生活节奏、生活品质形成了显明的反差。
家庭保洁机器人是可以为人们减去劳累、节省时间的高科技智能化家电。
家庭保洁机器人就像全自动洗衣机一样是家庭必不可少的家用电器,它无须人工操作,只需一按开关,自动运行。
目前在日本、韩国、美国等发达国家得以普及。
实现了科技节约时间,时间丰富生活。
智能保洁机器人对中国普通家庭来说现在还是奢侈品,但随着人们生活水平的不断提高,智能保洁机器人也将会在中国家庭中得以普及。
保洁机器人是一个较新的、环保的、高科技的行业,目前仍处于市场导入阶段,市场发展还不成熟,2007年以来保洁机器人在国际快速生长,市场增加率高达300%。
保洁机器人是一个朝阳行业,生长潜力庞大。
预计未来十年行业将进入高速发展期。
一、外观设计因为是试制第一个样板的缘故,暂不考虑专门设计机器人的外壳,以避免制造外壳模具产生的昂贵费用,而是临时采用了摩托车的后尾箱作为机器人的外壳,这是因为其容积大小适宜、外观时尚多样,造型也颇符合轮式机器人的设计理念。
常见摩托车尾箱如图1所示。
图1 常见的摩托车尾箱二、运动及控制单元设计1.运动部分的基本结构图2是机器人的底部工艺示意图图2 机器人底部工艺图图中:吸尘口用于吸入灰尘,左右两个带减速器的直流电动机分别直接驱动两个车轮转动,这是运动的来源,通过分别控制两个电机的“得电”与“断电”可实现运动的各种效果,例如S型形轨迹或者螺旋形运动轨迹。
电机的状态与运动轨迹关系如下表1所示:表1 运动控制表直流减速电动机的安装尺寸如图2所示。
管道清灰机器人设计

目录1. 绪论 (1)1.1机器人的发展综述 (1)1.1.1 机器人定义 (1)1.1.2 我国科学家对机器人的定义 (1)1.1.3 机器人发展简史 (2)1.2管道机器人概述 (4)1.2.1 国外管道机器人发展现状 (4)1.2.2 国内管道机器人发展现状 (4)1.3管道清灰机器人系统概述 (5)1.3.1 管道清灰机器人驱动方式 (5)1.3.2 管道清灰机器人操作臂设计要求 (6)1.3.3 管道清灰机器人行走机构设计 (6)1.3.4 管道清灰机器人系统组成 (7)2.管道清灰机器人本体结构的设计和三维模型的建立 (8)2.1P RO/E NGINEER软件的介绍 (8)2.1.1 Pro/E的系统特征 (8)2.1.2 Pro/Engineer主要模块介绍 (9)2.2管道清灰机器人本体结构三维模型的建立 (11)3. 管道清灰机器人运动学分析 (23)3.1机器人操作臂类型选择 (23)3.2铲斗转角差及卸载角分析 (25)3.3机器人操作臂自由度 (26)3.4操作臂死点分析 (26)4. 管道机器人运动机构仿真 (29)4.1铲斗铲灰 (29)4.2 铲斗举升 (31)4.3 铲斗旋转 (32)结论 (34)致谢 ................................................... 错误!未定义书签。
参考文献 . (34)1. 绪论1.1 机器人的发展综述1.1.1 机器人定义在科技界,科学家会给每一个科技术语一个明确的定义,但机器人问世已有几十年,机器人的定义仍然仁者见仁,智者见智,没有一个统一的意见。
原因之一是机器人还在发展,新的机型,新的功能不断涌现。
机器人涉及到了人的概念,成为一个难以回答的哲学问题。
就像机器人一词最早诞生于科幻小说之中一样,人们对机器人充满了幻想。
也许正是由于机器人定义的模糊,才给了人们充分的想象和创造空间。
机器人主要类型:操作型机器人:能自动控制,可重复编程,多功能,有几个自由度,可固定或运动,用于相关自动化系统中。
中央空调通风管道清洗机器人硬件设计
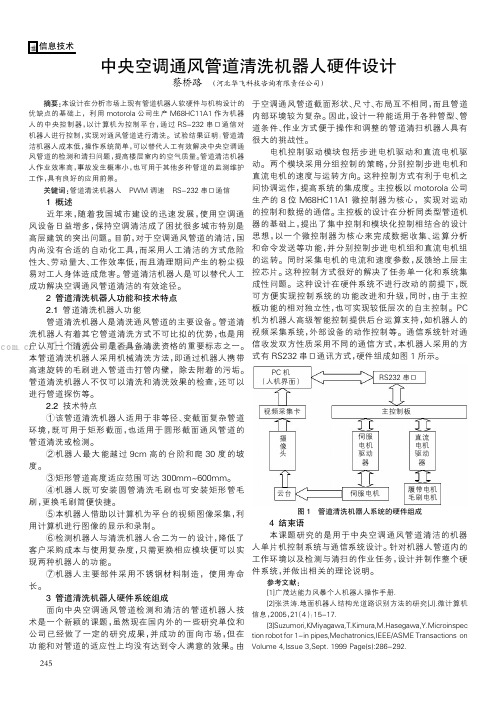
中央空调通风管道清洗机器人硬件设计作者:蔡桥路来源:《中小企业管理与科技·中旬刊》2014年第08期摘要:本设计在分析市场上现有管道机器人软硬件与机构设计的优缺点的基础上,利用motorola公司生产M68HC11A1作为机器人的中央控制器,以计算机为控制平台,通过RS-232串口通信对机器人进行控制,实现对通风管道进行清洗。
试验结果证明:管道清洁机器人成本低,操作系统简单,可以替代人工有效解决中央空调通风管道的检测和清扫问题,提高楼层室内的空气质量。
管道清洁机器人作业效率高,事故发生概率小,也可用于其他多种管道的监测维护工作,具有良好的应用前景。
关键词:管道清洗机器人 PWM调速 RS-232串口通信1 概述近年来,随着我国城市建设的迅速发展,使用空调通风设备日益增多,保持空调清洁成了困扰很多城市特别是高层建筑的突出问题。
目前,对于空调通风管道的清洁,国内尚没有合适的自动化工具,而采用人工清洁的方式危险性大、劳动量大、工作效率低,而且清理期间产生的粉尘极易对工人身体造成危害。
管道清洁机器人是可以替代人工成功解决空调通风管道清洁的有效途径。
2 管道清洗机器人功能和技术特点2.1 管道清洗机器人功能管道清洗机器人是清洗通风管道的主要设备。
管道清洗机器人有着其它管道清洗方式不可比拟的优势,也是用户认可一个清洗公司是否具备清洗资格的重要标志之一。
本管道清洗机器人采用机械清洗方法,即通过机器人携带高速旋转的毛刷进入管道击打管内壁,除去附着的污垢。
管道清洗机器人不仅可以清洗和清洗效果的检查,还可以进行管道探伤等。
2.2 技术特点①该管道清洗机器人适用于非等径、变截面复杂管道环境,既可用于矩形截面,也适用于圆形截面通风管道的管道清洗或检测。
②机器人最大能越过9cm高的台阶和爬30度的坡度。
③矩形管道高度适应范围可达300mm~600mm。
④机器人既可安装圆管清洗毛刷也可安装矩形管毛刷,更换毛刷简便快捷。
中央空调管道清洁机器人的设计2

衢州学院毕业设计〔论文〕题目:中央空调管道清洁机器人的设计作者:童顺丙系〔部〕:机电控制工程学院专业班级:机械设计与制造08级〔1〕班指导教师:田敬职称:讲师二O一一年一月十八日中央空调管道清洁机器人的设计摘要本次设计的机器人用于污染的中央空调管道的清洁,整体结构主要由行走机构、清扫机构和监视控制系统三局部组成,行走机构又分为驱动机构、导向轮系统两局部。
驱动方式为单电机驱动机器人前轴。
在清扫之前,通过调整支撑臂上的螺钉来调节两个导向轮的横向距离,保证机器人处于管道中央时导向轮两端距管道壁各有约20mm。
清洁工作主要由旋转刷系统完成,旋转刷由气动马达驱动,与气动马达相连的刷杆采用伸缩式结构,可以进行长度调节;旋转刷头可拆卸并且有不同的材料和尺寸系列,整个装置可以进行俯仰调整,从而保证在管道都能彻底清扫到管道的边角和顶部。
在清扫过程中,利用气动马达吹出的高压空气将扫落的灰尘吹向前方,便于抽风机抽出。
清洁过程中,通过监视系统可以方便的对清扫情况进行实时监控,当出现清扫效果不理想时可以操纵机器人后退再清扫一次。
关键字:中央空调管道,清洁机器人,马达,旋转刷目录第一章概述 (1)课题的背景及意义 (1)机器人开展现状及趋势 (2)国内领先水平的管道清洁机器人 (2)中央空调管道清洁机器人开展趋势 (3)1.3本课题的设计任务 (3)第二章中央空调管道机器人系统设计 (4)工作原理及组成 (4)机器人设计原那么 (5)2.3整体方案选择 (6)第三章行走机构设计 (8)机器人驱动机构 (8)电机的选择 (8)传动齿轮的设计 (9)传动轴的设计 (14)导向轮系统 (17)导向轮系统原理 (17)电机的选取 (17)传动带的选择 (18)导向轮的设计 (20)第四章清扫机构 (23)清扫方案确定 (23)旋转刷系统主要构件 (24)构件的选择 (24)气动马达的选择 (24)旋转刷的设计 (26)第五章监视控制系统 (28)摄像头的选择 (28)摄像头的固定和调整 (28)监视器 (29)照明装置 (29)灰尘收集装置 (30)第六章总结 (32)参考文献 (33)谢辞 (32)第一章概述课题的背景及意义随着当今社会的开展,空调通风系统在日常生活中发挥着越来越重要的作用。
风管清洁机器人机器人创新设计
风管清洁机器人机器人创新设计标准化管理部编码-[99968T-6889628-J68568-1689N]中央空调通风管清洁机器人机器人创新设计机制083沈鑫随着我国国民经济和城市建设的快速发展,中央空调已成为改善人们工作与生活环境的必备设施目前全国共有上百万台中央空调亟待清洁保养,其中相当一部分中央空调的通风系统从未进行过彻底的清洁,清洁面积大且纵横交错的中央空调通风管道已经成为长期的卫生死角,由此造成的室内空气污染问题严重影响着人们的身体健康尤其在非典、禽流感、H1N1等疫情发生之后,人们对这一问题更加关注,政府也陆续出台了相关的清洁规范,费时费力且清洁效果不佳的传统人工清洁方式已不能满足现实的需要,利用机器人进行清洁的空调清洁业正在悄然兴起,但就目前而言,中央空调风道清洁机器人市场却基本上被价格昂贵的外国产品占据,这些外国产品动辄几十万,多则上百万,使一般的企业难于承受。
因此自主研发高性价比的中央空调风道清洁机器人对促进我国中央空调风道清洗行业的发展,改善室内空气质量提高人民生活和健康水平等具有积极的意义。
在西方一些发达国家,中央空调清洁业已发展了几十年,形成了一个巨大的产业,有着比较成熟的清洁机器人技术。
尽管国外清洗机器人技术先进性能优良,但由于不是针对国内风道状况而设计,在清洁国内的风道时往往效果不甚理想。
国内一些单位提出了自己的中央空调风道清洁机器人设计及方案,但面对国内尺寸规格变化万千的风道,在适应性和清洁的彻底性方面还显欠缺针对上述实际问题,文中提出了一种新型的清洁机器人系统。
1机器人总体方案1.1系统清洁方案设计为节约建筑面积,国内建筑物的中央空调风道绝大部分设计成扁平矩形截面,且尺寸规格属非标产品,给风道清洁带来困难。
在进行风道清洁作业时,目前的清洁机器人需要经常更换不同尺寸的毛刷,操作繁琐,而且在两种不同尺寸风道的过渡处遇到毛刷与风道宽度不同的情况时必然会存在清洗死角,影响清洁效果文中设计的清洁方案采用横向俯仰二维运动拟合矩形清洁轨迹清洁风道,改变了现有清洁机器人只能作毛刷一维俯仰运动的现状,其工作原理如图1所示,该方案在毛刷旋转清洁风道时,如图1a中step1和step3所示,可以实现清洁臂的俯仰运动,同时还可以实现横向运动,如图1a 中step2和step4所示。
中央空调管道清洗机器人毕业设计

1.3
2006年6月,上海几家大医院陆续收治了几名“军团杆”的肺炎患者。专家指出,“军团杆菌”主要寄生在中央空调的冷却水和管道系统中,可经通风口进入写字楼内部,从而使人群受感染。中央空调和管道系统中不但有军团杆菌,还滋生着很多细菌,如大肠杆菌,血溶性链球菌及各种呼吸道疾病,严重危害了人们的健康和生产生活,近年来空调管道系统的清洁已越来越受到社会的关注。
Keywords:Adaptivemobile mechanismpipe robotMechanical design Screw—drive.
1
1.1
机器人技术是涉及机械学、传感器技术、驱动技术、控制技术、通信技术和计算机技术的一门综合性高新技术,既是光机电软一体化的重要基础,又是光机电软一体化技术的典型代表。其产品主要有两大类,即以日本和瑞典为代表的一系列特定应用的机器人,如弧焊、点焊、喷漆装备、刷胶和建筑等,并形成了庞大的机器人产业。另一类是以美国、英国为代表的智能机器人开发,由于人工智能和其它智能技术的发展远落后于人们对它的期望,目前绝大部分研究成果未能走出实验室。 机器人系统集成技术也是由几个主要发达国家所垄断。近年来,机器人技术并未出现突破性进展,各国的机器人技术研究机构和制造厂商都继续在技术深化、引进新技术和扩大应用领域等方面进行探索。
通风管道清扫机器人的开发设计
通风管道清扫机器人的开发设计作者:巩铎曹祥陈楚坪陈啸林来源:《硅谷》2014年第14期摘要本项目所研制的系统以单片机MSP430为主控芯片,利用相应的传感控制技术,采用轮式移动机构;配有高速旋转的清扫机构,装有摄像头以及照明灯;采用无线控制方式,由操作人员在管道外进行控制。
结合创新机械结构,加大除尘清扫范围,可以充分弥补现有通风管道清扫机的缺陷,达到智能化。
关键词单片机;传感控制技术;摄像头;智能化中图分类号:TP242 文献标识码:A 文章编号:1671-7597(2014)14-0013-021 作品介绍1.1 作品背景据调查报告显示,通风管道经长时间使用后会产生大量的灰尘、污垢等,进而会衍生大量的细菌等。
这大大的影响通风管道的通风性能,更严重的是细菌随送风系统吹进室内,污染室内的空气、传播疾病,严重影响人们身心健康。
人长期呆在这样的空间里,易患呼吸道疾病,头晕、乏力,免疫力下降等状况,还容易感染皮肤病。
因此,对通风管道的定期清扫是非常必要的。
由于通风管道的结构复杂,大小不一,要对其进行清扫非人力所能及的,故而开发一款轻巧的机器对通风管道进行清扫是非常必要的。
1.2 创造目的1)提高设备的智能化,通过车身上的摄像头进行管道图像扫描,保存管道地图,建立相应的数学模型,实现清扫的最佳路径,努力实现通风管道清扫机器人的自主清扫,尽最大努力减少人为控制。
2)采用横向单排旋转硬毛刷清扫底层,结合机械臂上的毛刷清扫顶层及其四周,加大对通风管道的清扫范围。
3)结合3G网络,实现摄像头图像实时传输,方便人为观察管道内的情况,以及对清扫时可能出现的突发事件,提供人为处理参考信息。
2 作品方案受建筑物楼层高度的限制,通风管道的形状主要有圆形和方形,管道的规格也各有不同,最扁平的管道高度仅150 mm左右。
而企业厂房一般楼层较高,为了减小送风阻力,会采用圆形截面的管道。
因此通风管道清扫机器人设计指标确定为矩形管高度150~650 mm和圆管最小直径 350 mm能适应大多数通风管道尺寸。
中央空调通风管道清洗机器人硬件设计
摘要:本设计在分析市场上现有管道机器人软硬件与机构设计的优缺点的基础上,利用motorola公司生产M68HC11A1作为机器人的中央控制器,以计算机为控制平台,通过RS-232串口通信对机器人进行控制,实现对通风管道进行清洗。
试验结果证明:管道清洁机器人成本低,操作系统简单,可以替代人工有效解决中央空调通风管道的检测和清扫问题,提高楼层室内的空气质量。
管道清洁机器人作业效率高,事故发生概率小,也可用于其他多种管道的监测维护工作,具有良好的应用前景。
关键词:管道清洗机器人PWM调速RS-232串口通信1概述近年来,随着我国城市建设的迅速发展,使用空调通风设备日益增多,保持空调清洁成了困扰很多城市特别是高层建筑的突出问题。
目前,对于空调通风管道的清洁,国内尚没有合适的自动化工具,而采用人工清洁的方式危险性大、劳动量大、工作效率低,而且清理期间产生的粉尘极易对工人身体造成危害。
管道清洁机器人是可以替代人工成功解决空调通风管道清洁的有效途径。
2管道清洗机器人功能和技术特点2.1管道清洗机器人功能管道清洗机器人是清洗通风管道的主要设备。
管道清洗机器人有着其它管道清洗方式不可比拟的优势,也是用户认可一个清洗公司是否具备清洗资格的重要标志之一。
本管道清洗机器人采用机械清洗方法,即通过机器人携带高速旋转的毛刷进入管道击打管内壁,除去附着的污垢。
管道清洗机器人不仅可以清洗和清洗效果的检查,还可以进行管道探伤等。
2.2技术特点①该管道清洗机器人适用于非等径、变截面复杂管道环境,既可用于矩形截面,也适用于圆形截面通风管道的管道清洗或检测。
②机器人最大能越过9cm高的台阶和爬30度的坡度。
③矩形管道高度适应范围可达300mm~600mm。
④机器人既可安装圆管清洗毛刷也可安装矩形管毛刷,更换毛刷简便快捷。
⑤本机器人借助以计算机为平台的视频图像采集,利用计算机进行图像的显示和录制。
⑥检测机器人与清洗机器人合二为一的设计,降低了客户采购成本与使用复杂度,只需更换相应模块便可以实现两种机器人的功能。
中央空调管道清洗机器人设计
0引言
随着社会经济的发展,中央空调在国内外的使用 率越来越高。然而不洁净的空调送风会对人体健康 带来不利影响,使人经常感觉胸闷气短、浑身乏力和 抵抗力下降,甚至诱发许多严重的疾病,包括:哮喘、 过敏、皮疹和肺结核等¨圳。由于集中空调是依靠风 道及出风口将处理后的空气送人房间,风道属密闭空 间,而室外空气中各类悬浮颗粒物不能完全被空调过 滤装置所阻隔,微细灰尘便会进入风道黏附在风道内 壁上,加之大多数风道狭小,日积月累便形成大量积 尘,诱发细菌滋生,传染疾病。同时空调管道内的积 尘使风力受阻,增大了风机负载,使机组工作能力下 降、设备寿命降低和能源消耗增加。由于管道结构的 原因,人工清洗困难,劳动量大,工作效率低,容易留 死角,清理产生的粉尘危害人体健康【5刁]。管道清洁 机器人是可以替代人工成功解决空调通风管道清洁 的有效途径。因此,笔者设计了一个中央空调管道清 洗机器人,并对实现该系统的关键技术进行了详细的
万方数据
讨论,主要包括管道清洗装置,实现管壁内侧积尘打 落,检测监控系统,检测监控管道内污染实际状况。
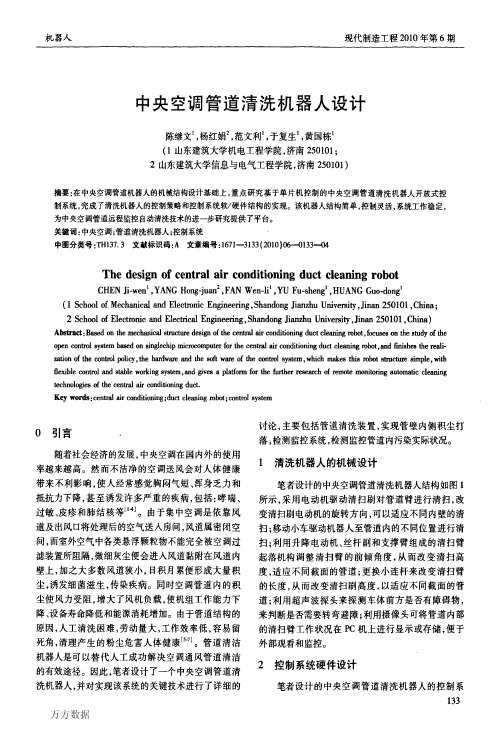
1 清洗机器人的机械设计
笔者设计的中央空调管道清洗机器人结构如图1 所示,采用电动机驱动清扫刷对管道臂进行清扫,改 变清扫刷电动机的旋转方向,可以适应不同内壁的清 扫;移动小车驱动机器人至管道内的不同位置进行清 扫;利用升降电动机、丝杆副和支撑臂组成的清扫臂 起落机构调整清扫臂的前倾角度,从而改变清扫高 度,适应不同截面的管道;更换小连杆来改变清扫臂 的长度,从而改变清扫刷高度,以适应不同截面的管 道;利用超声波探头来探测车体前方是否有障碍物, 来判断是否需要转弯避障;利用摄像头可将管道内部 的清扫臂工作状况在PC机上进行显示或存储,便于 外部观看和监控。
自动化管道清洗机器人的设计及控制

自动化管道清洗机器人的设计及控制随着社会发展和工业生产的不断推进,生产过程中的管道清洗已成为大型企业、工厂常见的问题。
为了高效清洗管道,人们研发了自动化管道清洗机器人。
本文旨在介绍自动化管道清洗机器人的设计及控制。
一、机器人设计方案1. 结构设计自动化管道清洗机器人主要由机械及控制系统两部分组成。
机械系统包括机器人身体、运动轮、管道探头、清洗喷头等组件,保证机器人能够顺利在管道中行走,完成清洗工作。
控制系统则由微处理器、驱动器、传感器等组件构成。
2. 原理设计自动化管道清洗机器人的工作原理是采用压缩空气作为动力源,通过微处理器控制组件的运动控制,从而实现对机器人的移动和清洗工作。
利用该工作原理可以达到自动控制管道清洗的目的。
二、控制系统设计1. 微处理器微处理器是整个控制系统的核心。
其控制机器人的运动轨迹,在管道中实现自主巡航,完成清洗任务。
同时,微处理器也可根据不同的管道情况进行自适应控制,能处理管道的各种紧急情况。
2. 传感器传感器是检测机器人与管道间距离、机器人清洗的区域等信息的重要组件,为机器人提供最新的环境信息。
这些信息将被传输到微处理器中,微处理器根据这些信息对机器人的控制进行优化。
3. 无线控制同时,由于自动化管道清洗机器人多数作业场所十分狭小复杂,传统的有线控制方式无法运用。
基于这种情况,利用无线通信技术设计出适合机器人运作的无线控制模块,确保了管道清洗的稳定高效。
三、机器人的使用及维护使用机器人前,需要进行机器人故障的排查,检查清洗器材,确保机器人的安全运行。
在机器人运行过程中,需定期检查机器人的各项设备,如轮子、清洗喷头等。
如有发现故障,请立即采取措施避免损坏机器人。
以上是自动化管道清洗机器人的设计及控制相关内容,通过机械、控制系统和传感器等组件的运作协调,实现了对管道的自动化清洗。
相信随着科技的不断发展,自动化管道清洗机器人的表现也会更加出色。
复杂管道清理机器人结构创新设计
———————————————收稿日期:2017-10-31复杂管道清理机器人结构创新设计曾军德,孙亮波*,龚俊杰,梁会勇,郭成成(武汉轻工大学 机械工程学院,湖北 武汉 430048)摘要:论述了管道机器人的研究现状,对几类典型管道机器人性能进行对比分析。
创新设计了一款适用于清理中小型管道的清洁机器人。
该装置由电机、履带行走机构、直径调节机构和清理机构组成。
电缆传输信号控制机器人在管道内行走;通过直径调节机构调节机器人尺寸以适应不同管径变化。
该机器人可两节串联使用以实现清洁力度的调节,配合气压杆装置调节刷头压力以增强清理效果,可适用于不同管径及污染程度的输水管道,具有良好的应用前景。
关键词:管道机器人;管道清理;履带式;直径调节机构 中图分类号:TH11 文献标志码:Adoi :10.3969/j.issn.1006-0316.2018.03.009文章编号:1006-0316 (2018) 03-0035-04Cleaning Robot Design of Complex Pipeline Structure InnovationZENG Junde ,SUN Liangbo ,GONG Junjie ,LIANG Huiyong ,GUO Chengcheng( School of Mechanical Engineering, Wuhan Polytechnic University, Wuhan 430048, China ) Abstract :The research status of pipeline robot is discussed, and the performance of several typical pipeline robots is compared and analyzed The innovative design of a suitable small pipeline cleaning in cleaning robot. The device is composed of motor, crawler, diameter adjusting mechanism and a cleaning mechanism. The cable transmission signal, control robot in pipe robot; regulation the diameter size adjusting mechanism, adapt to different diameter change. The robot can be used in series two, adjust the clean strength, with the pressure rod device to adjust the brush head pressure, enhance the cleaning effect, suitable for water pipes of different diameters and the degree of pollution, it has a good application prospect.Key words :pipeline robot ;pipeline cleaning ;caterpillar ;diameter adjusting mechanism管道运输作为一种高效的流体运输手段,广泛应用于核工业、石油煤炭、社会民生的各方面[1]。
新型空调通风管道清理机器人的设计与优化
新型空调通风管道清理机器人的设计与优化于涛,郭焕鹏,范欣,孔令赞(山东科技大学机械电子工程学院,山东青岛266590)来稿日期:2018-10-27基金项目:中国煤炭工业协会科技指导性计划项目(MTKJ 2012-344)作者简介:于涛,(1972-),男,山东泰安人,博士研究生,副教授,主要研究方向:煤炭装备的设计与制造技术1引言随着社会发展,中央空调的应用越来越广泛。
空调长期使用后,通风管道内形成大量积尘、病菌等污染物,诱发传染性疾病,危害人体健康,通风管道的清理越来越受到重视。
由于通风管路复杂,人工清理劳动量大、效率低,并且清理期间产生的粉尘会对工人身体造成严重的伤害。
管道清理机器人代替人工可以解决管道清理的诸多问题[1]。
目前,管道机器人主要分为轮式、蠕动式、履带式、脚式[2]。
国内外对于管道清理机器人的研究已经取得了一定的成果。
文献[3]都是具有代表性的管道清理设备。
国内一些科研单位也相继研制出了管道清理机器人:2012年国内某学者设计出履带式清理机器人[4],2016年国内某研究所研制出了移动小车式清洗机器人[5]。
现有的这些管道机器人车身大部分采用小车式,对倾斜管道适应性差,此外,当管道直径发生变化时毛刷不能始终紧贴管壁,清理效率低。
针对现有管道机器人存在的问题设计了一种新型机械式自变径管道清理机器人。
机器人的直径可随管道直径的变化而变化,保证了毛刷始终紧贴管壁,并利用ADAMS 对机器人清理机构进行优化,得到最佳设计尺寸。
2机器人的结构组成及工作原理2.1机器人的结构组成机器人的结构组成,如图1所示。
机器人按功能可分为清理摘要:针对现有通风管道清理机器人清理效率低、管道适应性差等问题,设计了新型空调通风管道清理机器人。
介绍了机器人的结构组成及各机构工作原理;分析了机器人弯管通过性并给出了机器人通过弯管的约束条件;以清理机构各杆件长度为设计变量,综合考虑机器人运动干涉、机器人主体直径等约束条件,以机器人驱动轮所在外圆半径与清理机构毛刷所在外圆半径之差最小为优化目标对机器人清理机构进行优化,得到机器人最佳设计尺寸。
自适应式室内风道清扫机器人的系统设计与运动分析
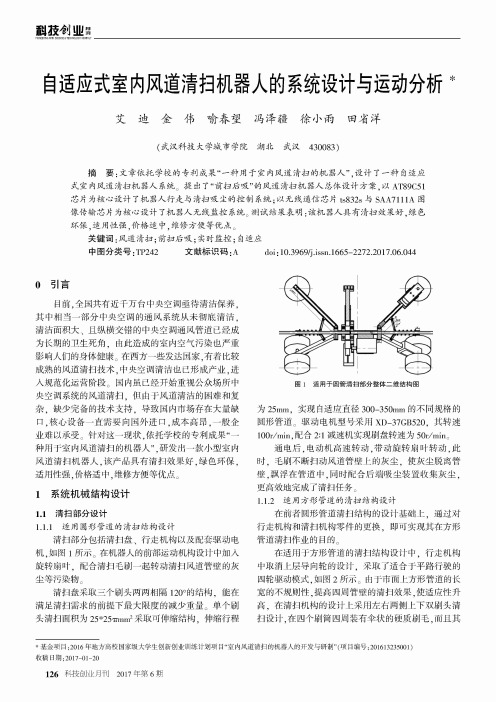
科技创业刊P I O N E E R I N G W I T H S C I E N C E&T E C H N O L O G Y M O N T H L Y自适应式室内风道清扫机器人的系统设计与运动分析艾迪金伟喻春望冯泽疆徐小雨田省洋(武汉科技大学城市学院湖北武汉430083)摘要:文章依托学校的专利成果“一种用于室内风道清扫的机器人”,设计了一种自适应式室内风道清扫机器人系统。
提出了“前扫后吸,’的风道清扫机器人总体设计方案,以A T89C51芯片为核心设计了机器人行走与清扫吸尘的控制系统;以无线通信芯片ts832s与S A A7111A图像传输芯片为核心设计了机器人无线监控系统。
测试结果表明:该机器人具有清扫效果好,绿色环保,适用性强,价格适中,维修方便等优点。
关键词:风道清扫;前扫后吸;实时监控;自适应中图分类号:TP242文献标识码:A0引言目前,全国共有近千万台中央空调亟待清洁保养,其中相当一部分中央空调的通风系统从未彻底清洁,清洁面积大、且纵横交错的中央空调通风管道已经成为长期的卫生死角,由此造成的室内空气污染也严重影响人们的身体健康。
在西方一些发达国家,有着比较成熟的风道清扫技术,中央空调清洁也已形成产业,进入规范化运营阶段。
国内虽已经开始重视公众场所中央空调系统的风道清扫,但由于风道清洁的困难和复杂,缺少完备的技术支持,导致国内市场存在大量缺口,核心设备一直需要向国外进口,成本高昂,一般企业难以承受。
针对这一现状,依托学校的专利成果“一种用于室内风道清扫的机器人冶,研发出一款小型室内风道清扫机器人,该产品具有清扫效果好,绿色环保,适用性强,价格适中,维修方便等优点。
1系统机械结构设计1.1清扫部分设计1.1.1适用圆形管道的清扫结构设计清扫部分包括清扫盘、行走机构以及配套驱动电机,如图1所示。
在机器人的前部运动机构设计中加入旋转扇叶,配合清扫毛刷一起转动清扫风道管壁的灰尘等污染物。
新型空调通风管道清理机器人的设计与优化
新型空调通风管道清理机器人的设计与优化摘要:近些年来,空调的广泛应用,一方面给人们的生活带来具大方便,但是另一方面也使大多数人越来越依赖空调,使空调的数量以及功能不断完善,应用范围更加的广泛,种类更加的多样化。
但是长期使用空调会对人的身体造成伤害,并且空调管道内积累的粉尘也会影响人的呼吸系统。
管道清理机器人是根据空调管道发展而来的,主要目的是为了清洗管道内的细菌等物质,但是现有的通风管道清理机器人的清理效率较低,管道适应性效能较差。
所以必须根据现有情况,根据各个工作原理去研究新型管道清理机器人,并对结构进行优化,以适应现代空调发展的要求。
关键词:空调;通风管道;机器人设计随着经济社会的发展,许多房屋内中央空调的应用也越来越广泛。
技术的更新对于中央空调来说,也扩大了其应用范围,不仅仅在商场中,而且在居民楼中,使其受到越来越多人的喜欢,但是长期使用中央空调会在管道内形成大量的累积病菌等污染物,对人体的身体造成严重的伤害。
而且空调的管道通风较差,并且人工清理的难度较大,长期积累的粉尘会对呼吸系统产生重要的影响。
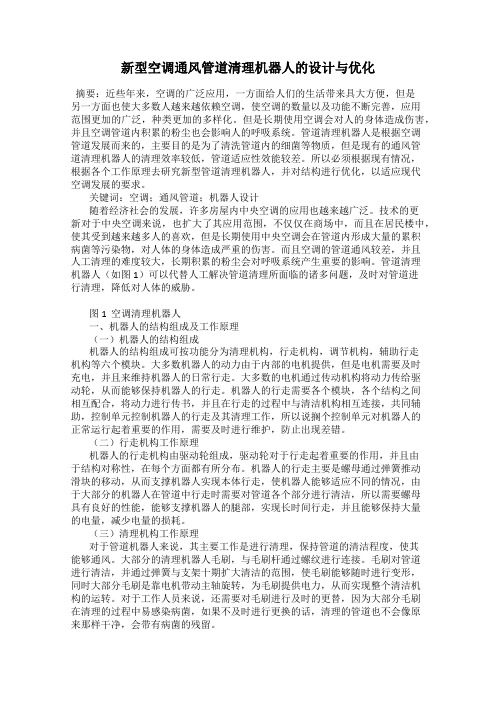
管道清理机器人(如图1)可以代替人工解决管道清理所面临的诸多问题,及时对管道进行清理,降低对人体的威胁。
图1 空调清理机器人一、机器人的结构组成及工作原理(一)机器人的结构组成机器人的结构组成可按功能分为清理机构,行走机构,调节机构,辅助行走机构等六个模块。
大多数机器人的动力由于内部的电机提供,但是电机需要及时充电,并且来维持机器人的日常行走。
大多数的电机通过传动机构将动力传给驱动轮,从而能够保持机器人的行走。
机器人的行走需要各个模块,各个结构之间相互配合,将动力进行传书,并且在行走的过程中与清洁机构相互连接,共同辅助,控制单元控制机器人的行走及其清理工作,所以说搁个控制单元对机器人的正常运行起着重要的作用,需要及时进行维护,防止出现差错。
(二)行走机构工作原理机器人的行走机构由驱动轮组成,驱动轮对于行走起着重要的作用,并且由于结构对称性,在每个方面都有所分布。
风管清洁机器人机器人创新设计
风管清洁机器人机器人创新设计标准化管理部编码-[99968T-6889628-J68568-1689N]中央空调通风管清洁机器人机器人创新设计机制083沈鑫随着我国国民经济和城市建设的快速发展,中央空调已成为改善人们工作与生活环境的必备设施目前全国共有上百万台中央空调亟待清洁保养,其中相当一部分中央空调的通风系统从未进行过彻底的清洁,清洁面积大且纵横交错的中央空调通风管道已经成为长期的卫生死角,由此造成的室内空气污染问题严重影响着人们的身体健康尤其在非典、禽流感、H1N1等疫情发生之后,人们对这一问题更加关注,政府也陆续出台了相关的清洁规范,费时费力且清洁效果不佳的传统人工清洁方式已不能满足现实的需要,利用机器人进行清洁的空调清洁业正在悄然兴起,但就目前而言,中央空调风道清洁机器人市场却基本上被价格昂贵的外国产品占据,这些外国产品动辄几十万,多则上百万,使一般的企业难于承受。
因此自主研发高性价比的中央空调风道清洁机器人对促进我国中央空调风道清洗行业的发展,改善室内空气质量提高人民生活和健康水平等具有积极的意义。
在西方一些发达国家,中央空调清洁业已发展了几十年,形成了一个巨大的产业,有着比较成熟的清洁机器人技术。
尽管国外清洗机器人技术先进性能优良,但由于不是针对国内风道状况而设计,在清洁国内的风道时往往效果不甚理想。
国内一些单位提出了自己的中央空调风道清洁机器人设计及方案,但面对国内尺寸规格变化万千的风道,在适应性和清洁的彻底性方面还显欠缺针对上述实际问题,文中提出了一种新型的清洁机器人系统。
1机器人总体方案1.1系统清洁方案设计为节约建筑面积,国内建筑物的中央空调风道绝大部分设计成扁平矩形截面,且尺寸规格属非标产品,给风道清洁带来困难。
在进行风道清洁作业时,目前的清洁机器人需要经常更换不同尺寸的毛刷,操作繁琐,而且在两种不同尺寸风道的过渡处遇到毛刷与风道宽度不同的情况时必然会存在清洗死角,影响清洁效果文中设计的清洁方案采用横向俯仰二维运动拟合矩形清洁轨迹清洁风道,改变了现有清洁机器人只能作毛刷一维俯仰运动的现状,其工作原理如图1所示,该方案在毛刷旋转清洁风道时,如图1a中step1和step3所示,可以实现清洁臂的俯仰运动,同时还可以实现横向运动,如图1a 中step2和step4所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中央空调通风管清洁机器人机器人创新设计随着我国国民经济和城市建设的快速发展,中央空调已成为改善人们工作与生活环境的必备设施目前全国共有上百万台中央空调亟待清洁保养,其中相当一部分中央空调的通风系统从未进行过彻底的清洁,清洁面积大且纵横交错的中央空调通风管道已经成为长期的卫生死角,由此造成的室内空气污染问题严重影响着人们的身体健康尤其在非典、禽流感、H1N1等疫情发生之后,人们对这一问题更加关注,政府也陆续出台了相关的清洁规范,费时费力且清洁效果不佳的传统人工清洁方式已不能满足现实的需要,利用机器人进行清洁的空调清洁业正在悄然兴起,但就目前而言,中央空调风道清洁机器人市场却基本上被价格昂贵的外国产品占据,这些外国产品动辄几十万,多则上百万,使一般的企业难于承受。
因此自主研发高性价比的中央空调风道清洁机器人对促进我国中央空调风道清洗行业的发展,改善室内空气质量提高人民生活和健康水平等具有积极的意义。
在西方一些发达国家,中央空调清洁业已发展了几十年,形成了一个巨大的产业,有着比较成熟的清洁机器人技术。
尽管国外清洗机器人技术先进性能优良,但由于不是针对国内风道状况而设计,在清洁国内的风道时往往效果不甚理想。
国内一些单位提出了自己的中央空调风道清洁机器人设计及方案,但面对国内尺寸规格变化万千的风道,在适应性和清洁的彻底性方面还显欠缺针对上述实际问题,文中提出了一种新型的清洁机器人系统。
1 机器人总体方案1.1 系统清洁方案设计为节约建筑面积,国内建筑物的中央空调风道绝大部分设计成扁平矩形截面,且尺寸规格属非标产品,给风道清洁带来困难。
在进行风道清洁作业时,目前的清洁机器人需要经常更换不同尺寸的毛刷,操作繁琐,而且在两种不同尺寸风道的过渡处遇到毛刷与风道宽度不同的情况时必然会存在清洗死角,影响清洁效果文中设计的清洁方案采用横向俯仰二维运动拟合矩形清洁轨迹清洁风道,改变了现有清洁机器人只能作毛刷一维俯仰运动的现状,其工作原理如图1所示,该方案在毛刷旋转清洁风道时,如图1a中step1和step3所示,可以实现清洁臂的俯仰运动,同时还可以实现横向运动,如图1a中step2和step4所示。
因而如图1b所示,机器人可根据风道大小对清洁臂俯仰和横向两个运动进行轨迹拟合,形成矩形清洁轨迹这样就使得清洁机器人在不更换毛刷的情况下,实现对不同尺寸风道的无死角清洁在保证风道内部4个面上的每一个点均能被清洁毛刷清洁至少一次的前提下,将矩形清洁轨迹与机器人行进驱动电机的运动再进行拟合,如图1 所示,在横向俯仰二维运动拟合矩形清洁轨迹的一个周期内,保证机器人行走距离s小于毛刷清洁宽度d,形成渐进式矩形螺旋清洁轨迹,实现对风道的无死角清洁。
1.2系统组成中央空调风道清洁机器人由清洁机器人本体电控系统和控制软件3部分组成,如图2所示,电控系统又包括工控机和电控箱。
1.2.1清洁机器人本体清洁机器人本体用于对风道实施清洁,并收集清洁下来的污物,同时将清洁的过程和效果通过实时视频监控向用户进行反馈清洁机器人本体包括移动机构清洁机构检测和消毒装置,实现了对风道进行清洁检测和消毒的一体化作业,具有功能齐全运动灵活操作简便的特点。
1.2.2电控系统电控系统结构如图3所示,由工控机与电控箱组成,其中工控机部分由工业PC,PCI 总线运动控制卡和视频采集卡组成,电控箱部分由开关电源和各电机驱动器组成在工作过程中,电控系统根据控制指令控制机器人行进驱动电机二维运动平台驱动电机清洁毛刷驱动电机和摄像头驱动电机进行相应的运动,同时计数除清洁毛刷驱动电机外各电机上编码器的脉冲信号,将数值存储在相应的寄存器中,并将摄像头视频信号和二维运动平台位置传感器信号反馈给控制软件,从而实现清洁机器人各种预定的运动。
1.2.3控制软件控制软件采用编程,界面友好,操作方便,实现了对清洁机器人的实时控制软件界面能将摄像头反馈的视频信号进行实时显示,通过观察视频图像,操作人员可以对清洁机器人所处状态进行判断,从而控制清洁机器人进行前进、后退、差速转向、二维运动平台横向俯仰单步运动,自动拟合矩形螺旋清洁轨迹,自动导向,摄像头旋转和摆动搜索等运动。
2 清洁机器人本体设计清洁机器人本体,其采用模块化设计,主要包括: 移动机构、清洁机构、检测装置和消毒装置。
2.1 移动机构设计国内的中央空调风道内部底面绝大部分为坚硬平坦且较为粗糙的水泥表面,仅在不同尺寸规格风道间的过渡处会有斜坡面出现,所以清洁机器人的移动机构采用简便易行的四轮结构,前轮为主动轮,采用独立驱动,即由两个步进电机分别驱动左右两个前轮,使得清洁机器人能够灵活地实现前进和两轮差速转弯,控制简单;后轮采用万向轮式结构,使得清洁机器人能够在风道内灵活地实现后退车轮采用防滑橡胶轮,可以达到清洁机器人在风道内自由移动而不至于打滑的要求。
2.2 清洁机构设计清洁机构是清洁机器人的核心部分,包括矩形螺旋清扫装置。
程控往复式吸尘清障装置和清洁毛刷,能够实现对不同尺寸的矩形风道进行无死角清洁,并能收集清洁下来的污物和灰尘,以便进行统一处理。
2.2.1 矩形螺旋清扫装置设计矩形螺旋式清扫装置用于拟合矩形清洁轨迹,如图6 所示,由横向运动平台和俯仰运动平台组成横向运动平台由齿轮、齿条、横向驱动电机、滚动导轨组成,其中滚动导轨和齿条固定在清洁机器人机架上,直齿轮与齿条啮合,并通过D形孔与横向驱动电机输出轴相连,横向驱动电机安装在横向移动平台架上,通过带动齿轮旋转,实现了移动平台横向运动清洁臂俯仰运动平台由滑轮、绕线轮、柔性拉索俯仰驱动电机、清洁臂和清洁臂转轴组成。
其中俯仰驱动电机通过D形孔与绕线轮相连,绕线轮通过滑轮缠绕柔性拉索,使清洁臂绕清洁臂转动轴做俯仰运动,实现了清洁毛刷俯仰运动。
2.2.2 程控往复式吸尘清障装置设计往复式吸尘清障装置,主要包括撮箕和吸尘器两部分,其中撮箕与二维运动机构中的横向运动平台架通过螺钉固联,在清洁机器人拟合矩形螺旋清洁轨迹清洁风道时,撮箕随清洁毛刷同步左右往复运动。
通过毛刷驱动电机带动毛刷旋转可将风道内清洁下来的污物扫入撮箕中,如果中途遇到较大的污物,如老鼠尸体等,清洁机器人可以像推土机一样,用撮箕将污物由风道出风口推出,克服了现有清洁机器人难于清理风道内较大污物的弊端清洁机器人后部装有吸尘器,撮箕后方设有随撮箕同步运动的吸尘口,可以与清洁毛刷同步运动,将清洁下来的灰尘吸入,实现吸尘功能基于以上功能,清洁机器人实现了对风道内不同种类污物的收集2.2.3 清洁毛刷设计清洁毛刷如图8 所示,其安装在清洁臂前端,采用圆柱形设计,端面采用碗状曲面,以提高毛刷的清洁效果,毛刷采用220 V 双轴交流电机直接驱动,毛刷与电机输出轴间采用 D 形孔连接,并安装有3根调整螺钉,以调整毛刷与电机轴的同轴度该设计保证了清洁毛刷在清洁风道壁时转速与输出力矩间有较大的刚度,使得毛刷能在不同清洁阻力的作用下转速变化不大,即在风道内管壁积灰程度不同的情况下依然能保证毛刷良好的清洁效果,同时去掉了毛刷与驱动电机间的动力传动装置,简化了设计,考虑到清洁臂的平衡问题,清洁臂后端应加适当配重。
3 矩形螺旋轨迹自动拟合和自动导向为了增强清洁机器人的适应能力和通用性,必须使其能够对不同尺寸风道自适应,由于清洁机器人采用了矩形螺旋清洁方式清洁风道,因此必须要解决矩形螺旋的自动拟合问题和机器人在风道内部的自动导向问题。
自动导向功能的实现清洁机器人自动导向功能分为微调整和粗调整两个部分。
1微调整微调整主要用于直道情况,由控制软件定时查询计数移动机构两驱动电机编码器脉冲的寄存器的数值,如两数值偏差大于一阈值n时,则控制软件向数值较小的寄存器对应的电机多发送n个脉冲,从而保证两驱动轮行走距离相同。
2粗调整粗调整由控制软件采集清洁机器人撮箕两侧碰撞开关信号和计数编码器脉冲的寄存器的数值,进而对清洁机器人进行乒乓控制如图10 所示,当清洁机器人处于弯道时,二维运动机构拟合矩形清洁轨迹,则行进一段距离后撮箕上的碰撞开关势必与风道壁碰撞,从而向控制软件发出到位信号,控制软件立即使二维运动机构的横向驱动电机反向运动并记录下此时计数横向驱动电机和移动机构驱动电机编码器脉冲的寄存器的数值n1和n2,其中n1为横向移动平台距离中点位置的脉冲数,n2为碰撞开关前后两次碰撞之间移动机构所行走的脉冲数清洁机器人处于直道时与弯道的情况类似,由以上分析可知,通过碰撞开关的碰撞信号和寄存器中的数值能够计算出清洁机器人偏离风道中心线的角度信息,从而根据该角度信息控制清洁机器人两驱动轮差速转向,使得清洁机器人中心线始终跟踪风道中心线,实现自动导向。
基于清洁机器人矩形螺旋轨迹的自动拟合和自动导向功能,清洁机器人就可以在风道中实现自动清洁。
4小结提出了一种新型的矩形螺旋清洁方式和往复式污物收集方式对中央空调风道进行清洁,解决了风道清洁作业中易遗留死角的问题在此基础上,对清洁机器人的移动机构清洁机构检测装置和消毒装置进行了设计,并对清洁机器人矩形螺旋轨迹自动拟合和风道内自动导向问题提出了解决方案,实现了机器人在。
风道内的自动清洁通过实验测试证明该设计方案符合对中央空调风道进行清洁作业的性能要求,且机器人结构简单,自动化程度高,适用范围广,成本不到外国同类产品的30%,达到了预期的设计效果。
参考文献[1]孙方明,张学发,刘沛,等.中央空调通风道系统的清洗[J].清洗世界,2007,23(6):36-38.[2]杨雄.风管清洗机器人国产化研究及应用[J].清洗世界,2004,20(11):37-40.[3]李德福.空调通风清洗规范的制定和理解[J].清洗世界,2004,20( 5):32-39.[4]崔建波,高丽萍.集中空调风道清洗现状与前景分析[J].清洗世界,2004,20(9):21-25.[7]李俊,唐志伟,吴玉庭,等.风道清洁机器人系统的设计优化与工程测试[J].工程热物理学报,2006,27(2):328-330.。