ARM实验1
ARMv8指令学习(1)
如果x0 !=0 , then jumpto label位置处执行
LDUR/LDURB/LDURSB/LDURH/LDURSH/LDURSW/STUR/
STURB / STURH
它们都属于Load-StoreSingle Register(unscaledoffset)
unscaledoffset :指的是”Baseaddr+一个立即数”
w0中的其它字节:用此byte的符号位扩展得到.
(4) ldurh
类似ldurb,不过:这次取halfword(2 bytes)
(5) ldursh
类似ldursb,不过:这次取halfword(2 bytes)
(6) ldursw
类似ldursb,不过:这次取word(4 bytes)
(7) sturx0,[base,#simm9]
把x0保存到[base+#simm9]指向的内存位置
(8) sturb x0,[base,#simm9]
把x0中的一个byte,保存到[base+#simm9]指向的内存位置
(9) sturh x0,[base,#simm9]
把x0中的一个half-word(2 bytes),保存到[base+#simm9]指向的内存位置
(1) ldur x0,[base,#simm9]
x0 = [base+simm9]指向的内容
(2) ldurb w0,[base,#simm9]
从[base+simm9]指向的内容中:取出一个byte,赋给w0.
w0中的其它字节:用0扩展得到.
(3) ldursbw0,[base,#simm9]
韦东山最新热门课程推荐:《ARM裸机1期加强版》
韦东山最新热门课程推荐:《ARM裸机1期加强版》
在您的单片机学习或工作过程中,是否会遇到过这样的问题?
1. 有单片机开发经验,无Linux操作基础、无硬件知识,如何学习嵌入式?
2. 在学校,学C51太简单没有竞争力怎幺办?一直玩C51裸机跑程序,没做过什幺东西,怎幺学习嵌入式开发?
3. 找不到有完整例程的书,无法系统地学习ARM裸机编程?
4. 如何快速掌握一个陌生的外设功能模块?
电子发烧友学院联合韦东山老师推出最新一期《ARM裸机开发实战》课程,能帮你把以上问题一扫而光!。
第1天-ARM汇编指令MOV-MVN

第1天-ARM汇编指令MOV/MVN
MOV : 传送(Move)
MOV{条件}{S} , dest = op_1MOV 从另一个寄存器、被移位的寄存器、或一
个立即值装载一个值到目的寄存器。
你可以指定相同的寄存器来实现NOP 指
令的效果,你还可以专门移位一个寄存器:MOVR0, R0; R0 = R0... NOP 指令MOVR0, R0, LSL#3; R0 = R0 * 8 如果R15 是目的寄存器,将修改程序计数器或标志。
这用于返回到调用代码,方法是把连接寄存器的内容传送到R15:
MOV PC, R14 ; 退出到调用者MOVS PC, R14 ; 退出到调用者并恢复标志位MVN : 传送取反的值
(MoveNegative)
MVN{条件}{S} , dest = !op_1MVN 从另一个寄存器、被移位的寄存器、或一
个立即值装载一个值到目的寄存器。
不同之处是在传送之前位被反转了,所以
把一个被取反的值传送到一个寄存器中。
这是逻辑非操作而不是算术操作,就
是二进制的取反,比如二进制是0B11001100,取反就是0B00110011,转换为10 进制就是,这个取反的值加 1 才是它的取负的值:
MVN R0, #4 ; R0 = -5 MVN R0, #0 ; R0 = -1tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
ARM9无操作系统实验(一)LED部分
开始
设置 GPB5 为输出状态
置位 GPB5,LED0 熄灭
设置 GPB 端口禁止上拉
清零 GPB5,点亮 LED0
结束
将程序加载到开发板上,就可以看实验的结果了,其它 LED 灯的控制和 LED0 一样,只是 寄存器的设置值不同罢了。
实验二、流水灯 终于能点亮一个 LED 灯了,那么它有什么用呢?它的主要用途在于一些状态的显示上,
GPB5 LED0 GPB6 LED1 GPB8 LED2 GPB10 LED3 ********************************************/
/*---------地址声明----------*/
#include "2440addr.h"
注释:在本程序的开头,引入一个 2440addr.h 的头文件,该文件中定义了我们要常用的 寄存器的地址,以后的程序中,只需引入即可。引入的方法是将这个头文件直接放在 ADS 安装文件的 include 中就行了。
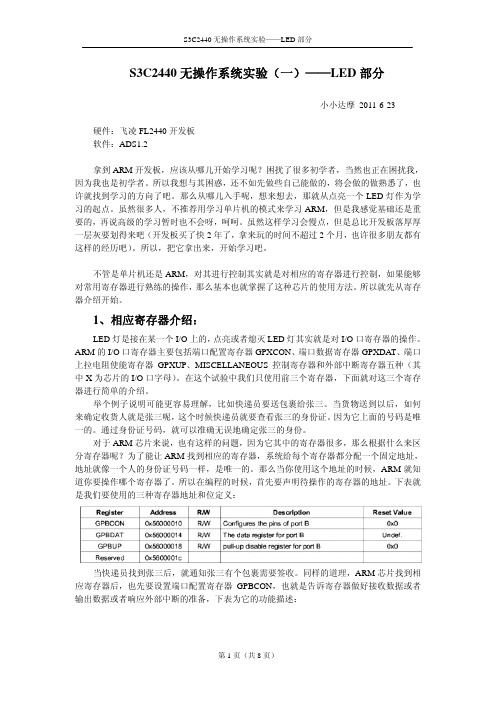
S3C2440 无操作系统实验——LED 部分
S3C2440 无操作系统实验(一)——LED 部分
小小达摩 2011-6-23
硬件:飞凌 FL2440 开发板 软件:ADS1.2
拿到 ARM 开发板,应该从哪儿开始学习呢?困扰了很多初学者,当然也正在困扰我, 因为我也是初学者。所以我想与其困惑,还不如先做些自己能做的,将会做的做熟悉了,也 许就找到学习的方向了吧。那么从哪儿入手呢,想来想去,那就从点亮一个 LED 灯作为学 习的起点。虽然很多人,不推荐用学习单片机的模式来学习 ARM,但是我感觉基础还是重 要的,再说高级的学习暂时也不会呀,呵呵。虽然这样学习会慢点,但是总比开发板落厚厚 一层灰要划得来吧(开发板买了快 2 年了,拿来玩的时间不超过 2 个月,也许很多朋友都有 这样的经历吧)。所以,把它拿出来,开始学习吧。
嵌入式系统实验一 存储器实验
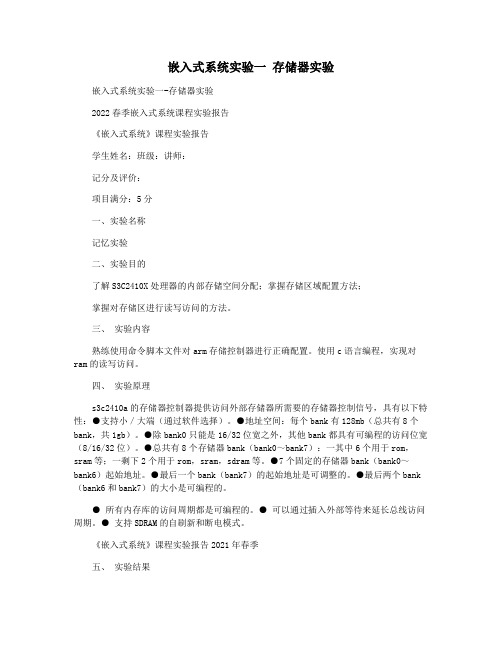
嵌入式系统实验一存储器实验嵌入式系统实验一-存储器实验2022春季嵌入式系统课程实验报告《嵌入式系统》课程实验报告学生姓名:班级:讲师:记分及评价:项目满分:5分一、实验名称记忆实验二、实验目的了解S3C2410X处理器的内部存储空间分配;掌握存储区域配置方法;掌握对存储区进行读写访问的方法。
三、实验内容熟练使用命令脚本文件对arm存储控制器进行正确配置。
使用c语言编程,实现对ram的读写访问。
四、实验原理s3c2410a的存储器控制器提供访问外部存储器所需要的存储器控制信号,具有以下特性:●支持小/大端(通过软件选择)。
●地址空间:每个bank有128mb(总共有8个bank,共1gb)。
●除bank0只能是16/32位宽之外,其他bank都具有可编程的访问位宽(8/16/32位)。
●总共有8个存储器bank(bank0~bank7):一其中6个用于rom,sram等;一剩下2个用于rom,sram,sdram等。
●7个固定的存储器bank(bank0~bank6)起始地址。
●最后一个bank(bank7)的起始地址是可调整的。
●最后两个bank (bank6和bank7)的大小是可编程的。
● 所有内存库的访问周期都是可编程的。
● 可以通过插入外部等待来延长总线访问周期。
● 支持SDRAM的自刷新和断电模式。
《嵌入式系统》课程实验报告2021年春季五、实验结果超级终端上显示一下信息:六、练习编写程序对sram进行字节的读写访问。
#包括\voidmemory_test(void){因蒂;uint16tdata;intmemerror=0;uint16t*pt;2022春季嵌入式系统课程实验报告uart_printf(\0x00e00000,_ram_startaddress+0x00f00000);pt=(uint16t*)(_ram_startaddress+0x00e0000);//记忆书写while((uint32t)pt<(_ram_startaddress+0x00f00000)){*pt=(uint16t)pt;pt++;}//memoryreaduart_uuuprintf(\memorytest(%xh-%xh):rd\\n\uuu内存_uuuu起始地址+0x00e00000,uuu内存_uuu起始地址+0x00f00000);pt=(uint16t*)(_ram_startaddress+0x00e00000);而((uint32t)pt<(_ram_startaddress+0x00f00000)){data=*pt;如果(数据!=(uint16t)pt){memerror=1;uart_uPrintf(\break;}pt++;}if(memerror==0)uart_printf(\}。
arm电源管理(1)——apm.c

arm电源管理(1)--apm.c -- 内核版本比较旧了由于arm系统中没有bios设备, 所以只能为arm系统创建一个虚拟的字符设备与用户空间进行通讯.这就是/arch/arm/kernel/amp.c1. 工作原理:这个apm中实现一个misc设备,实质上也是一个字符设备, misc设备的主设备号是10, 而apm_bios作为一个misc设备, 次设备号是134. 定义为:/** The apm_bios device is one of the misc char devices.* This is its minor number.*/#define APM_MINOR_DEV 134这个apm_bios设备通过ioctl系统调用和用户空间进行通讯, 即当用户进程通过ioctl发来suspend命令时, 它就传给内核, 使系统进入suspend状态.2. 初始化static int __init apm_init(void){int ret;if (apm_disabled) {printk(KERN_NOTICE "apm: disabled on user request.\n");return -ENODEV;}if (PM_IS_ACTIVE()) {printk(KERN_NOTICE "apm: overridden by ACPI.\n");return -EINVAL;}pm_active = 1;//创建一个线程, 用于处理事件队列, 工作函数是kapmd//这个线程好像在arm中没有作用?ret = kernel_thread(kapmd, NULL, CLONE_KERNEL);if (ret < 0) {pm_active = 0;return ret;}//通过proc向用户空间输出apm信息#ifdef CONFIG_PROC_FScreate_proc_info_entry("apm", 0, NULL, apm_get_info); #endif//注册misc设备ret = misc_register(&apm_device);if (ret != 0) {remove_proc_entry("apm", NULL);pm_active = 0;wake_up(&kapmd_wait);wait_for_completion(&kapmd_exit);}return ret;}注册的结构为:static struct file_operations apm_bios_fops = {.owner = THIS_MODULE,.read = apm_read,.poll = apm_poll,.ioctl = apm_ioctl,.open = apm_open,.release = apm_release,};static struct miscdevice apm_device = {.minor = APM_MINOR_DEV,.name = "apm_bios",.fops = &apm_bios_fops};3. 结构函数的实现当一个用户进程打开apm_bios设备时, 它就会调用这个函数static int apm_open(struct inode * inode, struct file * filp){struct apm_user *as;//分配一个apm_user结构, 来表示一个用户进程as = (struct apm_user *)kmalloc(sizeof(*as), GFP_KERNEL);if (as) {memset(as, 0, sizeof(*as));/** XXX - this is a tiny bit broken, when we consider BSD* process accounting. If the device is opened by root, we* instantly flag that we used superuser privs. Who knows,* we might close the device immediately without doing a* privileged operation -- cevans*///读写等权限设置as->suser = capable(CAP_SYS_ADMIN);as->writer = (filp->f_mode & FMODE_WRITE) == FMODE_WRITE;as->reader = (filp->f_mode & FMODE_READ) == FMODE_READ;//将这个用户加入用户队列down_write(&user_list_lock);list_add(&as->list, &apm_user_list);up_write(&user_list_lock);//这是一个传递私有数据的一个通用方式filp->private_data = as;}return as ? 0 : -ENOMEM;}当用户空间进程去读这个设备时, 这个函数就会被调用.这个函数的主要作用是将事件读出到用户空间static ssize_t apm_read(struct file *fp, char __user *buf, size_t count, loff_t *ppos) {struct apm_user *as = fp->private_data;apm_event_t event;int i = count, ret = 0;if (count < sizeof(apm_event_t))return -EINVAL;//队列空, 且进程非阻塞读, 立刻返回if (queue_empty(&as->queue) && fp->f_flags & O_NONBLOCK) return -EAGAIN;//否则等待到队列非空为止,wait_event_interruptible(apm_waitqueue, !queue_empty(&as->queue));//将队列中的事件复制给用户空间while ((i >= sizeof(event)) && !queue_empty(&as->queue)) { event = queue_get_event(&as->queue);ret = -EFAULT;if (copy_to_user(buf, &event, sizeof(event)))break;//设置状态if (event == APM_SYS_SUSPEND || event == APM_USER_SUSPEND) as->suspend_state = SUSPEND_READ;buf += sizeof(event);i -= sizeof(event);}if (i < count)ret = count - i;return ret;}//这个poll/select的后端实现, 用于查询有没有数据可读static unsigned int apm_poll(struct file *fp, poll_table * wait){struct apm_user *as = fp->private_data;poll_wait(fp, &apm_waitqueue, wait);return queue_empty(&as->queue) ? 0 : POLLIN | POLLRDNORM;}//这个是这个设备的核心函数, 用于内核与用户空间交互/** apm_ioctl - handle APM ioctl** APM_IOC_SUSPEND* This IOCTL is overloaded, and performs two functions. It is used to:* - initiate a suspend* - acknowledge a suspend read from /dev/apm_bios.* Only when everyone who has opened /dev/apm_bios with write permission * has acknowledge does the actual suspend happen.*/static intapm_ioctl(struct inode * inode, struct file *filp, u_int cmd, u_long arg){struct apm_user *as = filp->private_data;unsigned long flags;int err = -EINVAL;if (!as->suser || !as->writer)return -EPERM;switch (cmd) {case APM_IOC_SUSPEND:as->suspend_result = -EINTR;if (as->suspend_state == SUSPEND_READ) {/** If we read a suspend command from /dev/apm_bios,* then the corresponding APM_IOC_SUSPEND ioctl is* interpreted as an acknowledge.*/as->suspend_state = SUSPEND_ACKED;suspends_pending--;} else {/** Otherwise it is a request to suspend the system.* Queue an event for all readers, and expect an* acknowledge from all writers who haven't already* acknowledged.*/queue_event(APM_USER_SUSPEND, as);}/** If there are no further acknowledges required, suspend* the system.*/if (suspends_pending == 0)apm_suspend(); //系统进入suspend状态//从suspend中返回/** Wait for the suspend/resume to complete. If there are* pending acknowledges, we wait here for them.** Note that we need to ensure that the PM subsystem does* not kick us out of the wait when it suspends the threads.*/flags = current->flags;current->flags |= PF_NOFREEZE;/** Note: do not allow a thread which is acking the suspend* to escape until the resume is complete.*/if (as->suspend_state == SUSPEND_ACKED)wait_event(apm_suspend_waitqueue,as->suspend_state == SUSPEND_DONE);elsewait_event_interruptible(apm_suspend_waitqueue,as->suspend_state == SUSPEND_DONE);current->flags = flags;err = as->suspend_result;as->suspend_state = SUSPEND_NONE;break;}return err;}4. 事件队列函数static void queue_event(apm_event_t event, struct apm_user *sender) {struct apm_user *as;down_read(&user_list_lock);//将事件加入其他USER,除自己外list_for_each_entry(as, &apm_user_list, list) {if (as != sender && as->reader)queue_event_one_user(as, event);}up_read(&user_list_lock);//唤醒等待读的进程wake_up_interruptible(&apm_waitqueue);}static void queue_event_one_user(struct apm_user *as, apm_event_t event) {if (as->suser && as->writer) {switch (event) {case APM_SYS_SUSPEND:case APM_USER_SUSPEND:/** If this user already has a suspend pending,* don't queue another one.*/if (as->suspend_state != SUSPEND_NONE)return;as->suspend_state = SUSPEND_PENDING;suspends_pending++;break;}}queue_add_event(&as->queue, event);}static void queue_add_event(struct apm_queue *q, apm_event_t event) {q->event_head = (q->event_head + 1) % APM_MAX_EVENTS;if (q->event_head == q->event_tail) { //满了static int notified;if (notified++ == 0)printk(KERN_ERR "apm: an event queue overflowed\n");q->event_tail = (q->event_tail + 1) % APM_MAX_EVENTS;}q->events[q->event_head] = event; 加入队头}在来看一个出队的函数://在队尾出列static inline apm_event_t queue_get_event(struct apm_queue *q) {q->event_tail = (q->event_tail + 1) % APM_MAX_EVENTS;return q->events[q->event_tail];}/** APM event queue management.*/static inline int queue_empty(struct apm_queue *q){return q->event_head == q->event_tail;}//队列的结构/** Maximum number of events stored*/#define APM_MAX_EVENTS 16struct apm_queue {unsigned int event_head;unsigned int event_tail;apm_event_t events[APM_MAX_EVENTS];};5. apm_suspend()这里才是整个设备想做的事情--将系统转入suspend状态static void apm_suspend(void){struct apm_user *as;//调用体系无关的接口,将系统转入suspend状态int err = pm_suspend(PM_SUSPEND_MEM);//从suspend返回/** Anyone on the APM queues will think we're still suspended.* Send a message so everyone knows we're now awake again.*///发送一个resume事件queue_event(APM_NORMAL_RESUME, NULL);/** Finally, wake up anyone who is sleeping on the suspend.*/down_read(&user_list_lock);list_for_each_entry(as, &apm_user_list, list) {as->suspend_result = err;as->suspend_state = SUSPEND_DONE; //suspend完成}up_read(&user_list_lock);//唤醒睡眠进程wake_up(&apm_suspend_waitqueue);}。
重庆工商大学嵌入式实验考试题目答案
一、汇编指令实验一:(实验1~3无法调试结果但是基本上是正确的)(1)使用LDR 指令读取0x40003100上的数据,将数据加2 ,若结果小于20则使用STR 指令把结果写回原地址,若结果大于等于20,则把0 写回原地址。
然后再次读取0x40003100上的数据,将数据加2 ,判断结果是否小于20……周而复始循环FunLDR R0 , #0x40003100ADD R0 , #2CMP R0 , #20MOVGE R0 , #0STRLT R0 , #0x40003100B Fun二、汇编指令实验二:(1 )使用MOV和MVN指令访问ARM通用寄存器。
(2 )使用ADD、SUB 、AND、ORR、CMP、TST 等指令完成数据加减运算及逻辑运算。
(1)、(2)这个很简单就按照相应的操作(如:MOV和MVN) 的语法格式就行三、汇编指令实验三:(任选两题作答)(1 )使用ARM汇编指令实现if 条件执行, for 循环结构, while循环结构和while循环结构。
If条件执行:MOV R0 , 0 #R0初始化为0CMP R0 , 0 #比较R0与0的大小MOVEQ R0 , 1 #如果R0等于0 则修改R0为1For循环结构:MOV R5 , 10MOV R1 , #0 #求和MOV R2 , #1 #循环变量FORCMP R5 , R2 #进入for循环先判断BEQ ENDADD R1 , R1 ,R2ADD R2 , R2 ,#1B FORENDDo……while循环结构MOV R5 , 10MOV R1 , #0 #求和MOV R2 , #1 #循环变量DOWHILEADD R1 , R1 ,R2ADD R2 , R2 ,#1CMP R5 , R2 #do_while循环先执行后判断BEQ ENDB DOWHILEENDWhile循环结构MOV R5 , 10MOV R1 , #0 #求和MOV R2 , #1 #循环变量WHILECMP R5 , R2 #进入while循环的时候先判断BEQ ENDADD R1 , R1 ,R2ADD R2 , R2 ,#1B WHILEEND四、c语言程序实验:C 程序使用加法运算来计算1+2+3+...+(99-1)+100的值。
1_ARM开发环境

接口资源Biblioteka 启动模式6410开发板选择了其中两种启动方式,nand flash启动和SD卡启动:
• 拨动S2 开关到SDBOOT标识一侧时,系统将从SD卡启动:引导程序固 化在SD卡中
• 拨动S2 开关到Nand标识一侧时,系统将从Nand Flash 启动:引导程 序固化在Nand中
什么是引导程序
ARM处理器系列
• 处理器系列是共享相同硬件特性的一组处理器的具体实现 如ARM7TDMI、ARM740T、ARM720T都属于ARM7系列
• 系列划分是基于ARM7,ARM9,ARM10和ARM11内核的
后缀数字7,9,10,11表示不同的内核设计,升序说明了性能和复杂 性的提高
• ARM7系列:冯.诺伊曼体系结构,3级流水线,执行ARMv4指令集, 1995年提出的ARM7TDMI是目前非常流行的内核
RVDS配置源码工程
8、清除已有编译目标
RVDS编译源码工程
1:编译工程,构造程序(F7)
RVDS编译源码工程
2:proj工程目录内下生成6410.bin程序映像
将6410.bin通过tftp下载到开发板0x50000000地址, go 50000000运行
RVDS在线调试
RVDS上集成的ADX在线调试功能需要用到JLINK仿真器,通过JTAG接口与CPU 连接实现硬件仿真:在线调试在以后课程中介绍
ARM产品
ARM产业链
ARM技术
ARM架构命名
| ARMv | n | variants | x(variants) |
ARMv:固定字符,即ARM Version n :指令集版本号。迄今为之,ARM架构版本发布了7个版本,n=[1:7] variants:变种 x(variants):排除x后指定的变种
嵌入式系统——实验1
《嵌入式系统设计(实验课)》内容安排《嵌入式系统设计(实验课)》是《嵌入式系统设计》课程的一个重要环节。
通过实验,学生可以对嵌入式系统的设计与开发过程有更深地体会。
实验课共八次,每次2学时,实验内容结合课程内容,介绍一般的实验开发流程和软件硬件开发环境,并辅之以典型的嵌入式程序设计实例,使学生掌握基本的嵌入式软件开发技能。
大量的具有实际应用背景的实验,更将理论与实践结合起来,使实验内容更加生动。
实验报告要求一、实验名称:说明:本次实验的名称二、实验目的:说明:本次实验的主要目的,参考每次的实验指导书三、实验环境:说明:实验用到的硬件软件环境。
四、实验内容与步骤:说明:实现实验目的而进行的实验内容,如果有步骤要求则简要列出步骤五、实验报告总结:说明:对本次实验的总结,1.画出主函数的程序流程图,2.重写主程序.或者:自拟一个新的应用,参照本次实验的主程序,重新设计主程序并给出详尽注释。
3.其他,本次实验得到了什么?收获是什么?有些什么别的想法?六、建议与意见:说明:对于此次实验内容或在实验过程中有任何问题或建议,以及对于改善实验效果有什么建议,均可提出。
在书写实验报告的过程中,主要是帮助自己回顾和总结实验。
重点放在第五部分,前四项可以十分简要地列写,第六项有则提出,无则不写。
实验一嵌入式微处理器系统的开发环境一、实验环境PC机一台软件: ADS 1.2集成开发环境一套二、实验目的1.了解嵌入式系统及其特点;2.熟悉嵌入式系统的开发环境和基本配置并能编写简单的汇编程序三、实验内容1.嵌入式系统的开发环境、基本配置2.使用汇编指令完成简单的加法实验四、实验步骤(1)在D:\新建一个目录,目录名为experiment。
(2)点击 WINDOWS 操作系统的“开始|程序|ARM Developer Suite v1.2 |Code Warrior for ARM Developer Suite”启动Metrowerks Code Warrior,或双击“ADS 1.2”快捷方式启动。
arm跳转指令例子(一)

arm跳转指令例子(一)ARM跳转指令例子在ARM架构中,跳转指令是用于改变程序控制流的重要指令之一。
通过使用跳转指令,程序可以在执行过程中无条件或有条件地转移到其他指令的地址。
下面是一些常见的ARM跳转指令例子,并对其进行详细讲解:1. B(无条件跳转指令)B label该指令会使程序跳转到与指定标签相对应的地址处,无条件地执行该地址处的指令。
2. BL(带链接的跳转指令)BL subroutineBL指令用于调用子程序或函数。
它会将当前指令地址保存在链接寄存器(LR)中,并将程序控制流转移到指定子程序地址处。
使用BL指令后,执行完子程序后会返回到调用指令的下一条指令。
3. BEQ(等于时跳转指令)BEQ labelBEQ指令用于在条件等于时跳转到指定标签处。
当标志寄存器中的等于标志为设置时,程序将跳转到指定标签处执行。
4. BNE(不等于时跳转指令)BNE labelBNE指令用于在条件不等于时跳转到指定标签处。
当标志寄存器中的等于标志为清除时,程序将跳转到指定标签处执行。
5. BGT(大于时跳转指令)BGT label该指令用于在条件大于时跳转到指定标签处。
当标志寄存器中的大于标志和零标志都被清除,并且溢出标志被设置时,程序将跳转到指定标签处执行。
6. BLE(小于等于时跳转指令)BLE labelBLE指令用于在条件小于等于时跳转到指定标签处。
当标志寄存器中的大于标志和零标志中的任何一个被设置时,程序将跳转到指定标签处执行。
这些例子展示了常见的ARM跳转指令的用法和目的。
通过合理使用这些指令,程序能够实现不同的控制流程和条件判断,从而实现更为灵活和复杂的功能。
注意:在实际的ARM汇编代码中,标签(label)通常是一个地址或符号的名称,并且在汇编代码中需要定义这些标签所对应的地址。
以上例子中的标签仅用于说明目的和用法,并不涉及具体的地址定义。
希望这些例子能够帮助你更好地理解和使用ARM跳转指令。
《嵌入式电子系统设计》课程实验指导书实验1:最小系统实验,(2014.7.11)

实验一最小系统实验一、实验目的熟悉最小系统的硬件构成,掌握复位电路、晶振电路、电源电路(尤其是滤波电容的应用),编写一个例程,并在最小系统上运行;了解嵌入式开发的基本思想和过程。
掌握最小系统的构成,在将来的项目运用中能根据不同的场合选择相应的复位电路。
二、实验原理本实验通过一个简短的 Boot 引导程序介绍 ARM 开发平台的启动过程,同时该引导程序也可其他章节程序引导的示例程序。
本程序主要为了让读者能够清晰理解启动程序的基本架构组成部分以及掌握ARM 引导程序的编写方法。
三、主要实验设备1.硬件:宿主机、ARM教学试验箱;2.软件:Windows操作系统、ADS1.2集成开发环境。
四、实验内容构建最小系统,用示波器观察一下晶振电路的波形,测一下晶振正常工作时的电压。
编写一个例程,编译并运行。
设置ARM仿真器的开发环境。
程序架构如下:1.程序头IMPORT MDCNFG ;声明 MDCNFG(读写寄存器)物理地址0x48000000IMPORT MDREFR ;声明 MDREFR(刷新寄存器)0x48000004IMPORT MDMRS ;声明 MDMRS(模式/设置寄存器 0x48000040IMPORT init_MDCNFG ; 声明 init_MDCNFG 0x02000ac9IMPORT init_MDREFR ; 声明 init_MDREFR 0x0011e018IMPORT init_MDMRS ; 声明 init_MDMRS 0x320032IMPORT StackSvc ; 声明 StackSvc 0xa0600000IMPORT StackIrq ; 声明 StackIrq 0xa0605000IMPORT StackFiq ; 声明 StackFiq 0xa060a000IMPORT StackAbt ; 声明 StackAbt 0xa060e000IMPORT StackUnd ; 声明 StackUnd 0xa0714000IMPORT StackUsr ; 声明 StackUsr 0xa0720000IMPORT mainIMPORT宏通知编译器本源码文件需要引用在其他文件中定义的变量或函数。
嵌入式系统设计(实验一)

工业控制
嵌入式系统被广泛应用于工业 自动化领域,如生产线控制、 机器人控制等。
医疗设备
嵌入式系统可以实现医疗设备 的自动化控制和数据采集,如 医疗监护仪、输液泵等。
其他领域
嵌入式系统还可以应用于通信、 能源、环保等领域,发挥着越 来越重要的作用。
03
硬件平台搭建与配置
硬件平台选择
ARM开发板
传感器与执行器
汇编语言
针对特定硬件平台,使用汇编语言可 以实现更高效的代码执行和更精确的 硬件控制。
软件架构设计
分层架构
将系统划分为多个层次,每个层次负责特定的功能,降低系统复 杂性并提高可维护性。
事件驱动架构
通过事件触发相应的处理函数,实现模块间的解耦和异步通信。
微内核架构
将核心功能集中在微内核中,通过插件或模块扩展系统功能,提高 灵活性和可扩展性。
嵌入式系统设计(实验一)
• 实验目的与要求 • 嵌入式系统概述 • 硬件平台搭建与配置 • 软件设计与实现 • 系统测试与验证 • 实验总结与展望
01
实验目的与要求
实验目的
掌握嵌入式系统基本概念
01
通过实验了解嵌入式系统的定义、特点、应用领域等基本概念。
熟悉嵌入式开发环境
02
学习搭建嵌入式开发环境,包括硬件平台、操作系统、开发工
THANKS
感谢观看
提交实验报告
按时提交完整的实验报告,展示实验成果和 收获。
02
嵌入式系统概述
嵌入式系统定义
01
嵌入式系统是一种专用的计算机 系统,它被设计为控制、监视或 者辅助操作机器和设备的运行。
02
与通用计算机系统不同,嵌入式 系统通常被嵌入到特定的设备中 ,执行特定的任务,并且不需要 人工干预。
(完整版)基于ARM的视频监控系统的设计与实现1_图文.

-42-20078产品设计与实现一、前言二、数字视频监控系统的组成三、视频服务器的硬件实现监控系统作为现代企业不可缺少的重要组成部分,已广泛应用于交通、医院、银行、家居、视频会议和视频点播、证券、远程教育等诸多领域,可以有效地避免安全隐患的发生,保障员工人身安全和企业资产不受损失,实现无人值守。
早期的模拟监控系统不能联网,只能与监控中心进行点对点通信,随着图像与视频处理技术、网络技术和自动控制技术的发展,视频监控系统已过渡到数字化的网络监控。
它以数字视频的压缩、传输、存储和播放为核心,采用先进的数字图像压缩编/解码技术和传输技术,将智能图像处理与识别技术用于图像显示、调整、跟踪,根据现场环境智能调节摄像机的位置及清晰度,对物体进行跟踪识别,对图像进行分析和处理。
数字视频监控系统主要由监控中心、通信链路和多个监控站点组成。
通讯链路在企业内部使用企业已经铺设好的局域网线路,将其连人企业内部网,然后可以将其接人Internet,以便将信号传输给远端分控计算机或授权用户。
传输的数据包括视频、报警等录像数据和控制信号。
监控中心具有电视墙、磁盘阵列、服务器、交换机和路由器等网络设备,还可以通过多级级联构成多级监控系统。
监控站点主要由视频服务器和摄像机组成,整个系统组网灵活;可以突破地域限制,进行大规模、远距离的实时图像监控和报警处理。
如图1所示。
监控系统的软件包括客户端、服务器端软件两部分以及相互之间的通信。
在实际工作中,根据实际情况,在需要的地方安装相应的前端监控设备(彩色或黑白摄像机、固定或活动云台、定焦或变焦和相应的软件系统。
图I中的每个监控站点主要由摄像头、云台控制器、网络视频服务器组成,可配置可变镜头、麦克风、扬声器等外设,如图2所示。
其中网络视频服务器以嵌人式微处理器为核心,由视频采集编码模块、网络功能模块、实时时钟模块、摄像头云台控制模块等组成。
嵌人式微处理器是硬件部分的核心 , 采用 SAMSUNG的微处理器S3C4510B。
实验1-ARM基础编程仿真(Keil)
5、ARM汇编实现冒泡算法(选做) 冒泡排序参考流程-----较小的数值排放到后面
24
5、ARM汇编实现冒泡算法(选做)
冒泡排序法原理:
这种方法的基本思想:是将待排序的元素看作是竖着排列的 “气泡”,较大的元素比较重,从而要往下沉。在冒泡排序算法 中我们要对这个“气泡”序列处理若干遍。所谓一遍处理,就是 自上向下检查一遍这个序列,并时刻注意两个相邻的元素的顺序 是否正确。如果发现两个相邻元素的顺序不对,即“轻”的元素 在下面,就交换它们的位置。显然,处理一遍之后,“最重”的 元素就沉到了最低位置;处理二遍之后,“次重”的元素就沉到 了次低位置。在作第二遍处理时,由于最低位置上的元素已是 “最重”元素,所以不必检查。一般地,第i遍处理时,不必检 查第i低位置以下的元素,因为经过前面i-1遍的处理,它们已正 确地排好序。
25
5、ARM汇编实现冒泡算法(选做)
实验步骤: 1、建立新工程,加入实验1.5文件夹中的maopao.s。 2、补充完成源代码中缺失的部分,实现冒泡排序功能。 3、运行Debug进行调试
实验一 ARM基础编程实验
1
一、实验目的与实验环境
实验目的
1.熟悉并掌握常用ARM汇编指令 2.熟悉并掌握“C+汇编”混合编程技术 3.熟练使用ARM软件开发调试工具Keil
实验环境
1. 硬件:PC 机 2. 软件:Windows操作系统,Keil软件
2
二、实验内容
1. 学习使用Keil开发工具 2. 实现累加运算功能(汇编编程,必做) 3. 实现字符串拷贝功能(C+汇编,必做) 4. 实现求和运算功能(C+汇编,必做) 5. 实现冒泡排序算法(汇编编程,选做)
16
2、用汇编语言实现1+2+...+N的累加(必做)
嵌入式系统实验报告-1-外部中断

《嵌入式系统技术》实训报告1、实验目的z了解S3C2440A 外部中断的工作原理。
z掌握S3C2440A 外部中断的使用方法。
2、实验设备z PC 机、Multi-ICE 仿真器、2440A 实验箱。
3、实验内容z通过外部K1、K2、K3、K4、K5、K7 按键触发外部中断E INT1、EINT2、EINT3、EINT4、EINT5、EINT74、实验原理4.1 ARM 的异常中断类型在嵌入式系统中外部设备的功能实现主要是靠中断机制来实现的。
中断功能可以解决CPU 内部运行速度远远快于外部总线速度而产生的等待延时问题。
ARM 提供的FIQ 和IRQ 异常中断用于外部设备向C PU 请求中断服务,一般情况下都是采用I RQ 中断。
七种异常中断中断过程框图4.2 异常中断响应过程和返回过程异常中断的响应过程:1).保存处理器当前状态寄存器C PSR 的值到备份程序状态寄存器S PSR 中。
2).设置但前程序状态寄存器CPSR 的值,其中包括:设置CPSR 响应位的值,使处理器进入特定的处理器模式;按要求屏蔽中断,通常应该屏蔽I RQ 中断。
在F IQ 中断时屏蔽F IQ 中断。
3).设置L r 寄存器。
将相应中断模式的L r 寄存器的值设为异常中断的返回地址。
4).处理程序计数器PC,将PC 值设为相应的中断向量的地址,从而实现跳转以执行中断服务程序。
异常中断的返回当处理器执行完以上流程之后,处理器已经从中断向量进入异常处理的状态。
异常中断处理完毕之后,在异常中断程序的末端,处理器进入异常中断的返回状态,其流程如下:1).恢复状态寄存器。
将保存的备份程序状态寄存器SPSR 值赋给当前程序状态寄存器CPSR。
2).将返回地址赋值到程序计数器(PC)。
这样程序将返回到异常中断产生的下一条指令或出现问题的指令处执行。
需要注意的是:对于不同的异常中断,其返回地址的计算方法也是不同的,IRQ 和F IQ 异常中断产生时,程序计数器PC 已经更新,而SWI 中断和未定义指令中断时由当前指令自身产生的,程序计数器P C 尚未更新,所以要计算出下一条指令的地址来执行返回操作;指令预取指中指异常中断和数据访问中断要求,返回到出现异常的执行现场,重新执行操作。
嵌入式实验一:LED灯点亮

嵌⼊式实验⼀:LED灯点亮实验⼀:LED灯程序⼀、实验环境开发机环境操作系统:ubuntu 12.04交叉编译环境:arm-linux-gcc 4.3.26410板⼦内核源码:linux-3.0.1⽬标板环境:OK6410-A linux-3.0.1⼆、实验原理image.png图1-OK6410LED原理图image.png图2-LED原理图从上⾯的原理图可以得知,LED与CPU引脚的连接⽅法如下,低电平点亮。
LED1 -GPM0LED2 -GPM1LED3 -GPM2LED4 -GPM3image.png通过上⾯可以得知,需要先将GPM0设置为输出⽅式。
将相应的寄存器进⾏配置。
然后将GPMDAT寄存器的第0位置0灯亮,置1灯灭。
三、实验代码1.编写驱动程序#include <linux/module.h>#include <linux/kernel.h>#include <linux/fs.h>#include <asm/uaccess.h> /* copy_to_user,copy_from_user */#include <linux/miscdevice.h>#include <linux/pci.h>#include <mach/map.h>#include <mach/regs-gpio.h>#include <mach/gpio-bank-m.h>#include <plat/gpio-cfg.h>#define LED_MAJOR 240int led_open(struct inode *inode, struct file *filp){unsigned tmp;tmp = readl(S3C64XX_GPMCON);tmp = (tmp & ~(0x7U << 1)) | (0x1U);writel(tmp, S3C64XX_GPMCON);printk("#########open######\n");return 0;}ssize_t led_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos){printk("#########read######\n");return count;}ssize_t led_write(struct file *filp, const char __user *buf, size_t count, loff_t *f_pos) {char wbuf[10];unsigned tmp;printk("#########write######\n");copy_from_user(wbuf, buf, count);switch (wbuf[0]){case 0: //offtmp = readl(S3C64XX_GPMDAT);tmp |= (0xfU);writel(tmp, S3C64XX_GPMDAT);break;case 1: //ontmp = readl(S3C64XX_GPMDAT);tmp &= ~(0xfU);writel(tmp, S3C64XX_GPMDAT);break;default:break;}return count;}int led_release(struct inode *inode, struct file *filp){printk("#########release######\n");return 0;}struct file_operations led_fops = {.owner = THIS_MODULE,.open = led_open,.read = led_read,.write = led_write,.release = led_release,};int __init led_init(void){int rc;printk("Test led dev\n");rc = register_chrdev(LED_MAJOR, "led", &led_fops);if (rc < 0){printk("register %s char dev error\n", "led");return -1;}printk("ok!\n");return 0;}void __exit led_exit(void){unregister_chrdev(LED_MAJOR, "led");printk("module exit\n");return;}module_init(led_init);module_exit(led_exit);2.编写Makefile⽂件ifneq ($(KERNELRELEASE),)obj-m := driver_led.oelseKDIR := /work/linux-3.0.1all:make -C $(KDIR) M=$(PWD) modules ARCH=arm CROSS_COMPILE=arm-linux-clean:rm -f *.ko *.o *.mod.o *.mod.c *.symversendif3.编写测试⽂件#include <stdio.h>#include <sys/types.h>#include <sys/stat.h>#include <fcntl.h>int main (void){int fd;char buf[10]={0,1,0,1};fd = open("/dev/my_led",O_RDWR);if (fd < 0){printf ("Open /dev/my_led file error\n");return -1;}while(1){write(fd,&buf[0],1);sleep(1);write(fd,&buf[1],1);sleep(1);}close (fd);return 0;}四、实验步骤1、编译驱动程序和测试程序在终端中运⾏:#make命令,编译成功⽣⽣下列⽂件在终端中运⾏:#arm-linux-gcc test.c -o test,编译成功⽣成⽂件2、将⽂件拷贝到SD卡3、将SD卡插⼊到OK6410开发板中4、在OK6410终端中运⾏程序加载驱动:#insmod sdcard/driver_led.ko创建设备⽂件:# mknod /dev/my_led c 240 0运⾏测试⽂件:#./sdcard/test卸载驱动程序:#rmmod sdcard/driver_led.ko5、运⾏结果此时可以看到OK6410开发板的4个LED灯⼀直同时点亮,然后熄灭。
实验1 ARM 指令实验
2012-5-17
深圳市优龙科技有限公司
数据处理指令 数据处理指令可分为数据传送指令、算术逻 辑运算指令和比较指令等。 数据传送指令用于在寄存器和存储器之间进 行数据的双向传输。 算术逻辑运算指令完成常用的算术与逻辑的 运算,该类指令不但将运算结果保存在目的寄 存器中,同时更新CPSR中的相应条件标志位。 比较指令不保存运算结果,只更新CPSR中 相应的条件标志位。
加载/存储指令 加载 存储指令 ARM微处理器支持加载/存储指令用于在寄存器和存 储器之间传送数据,加载指令用于将存储器中的数据传 送到寄存器,存储指令则完成相反的操作。 常用的加载存储指令如下: ------ LDR 字数据加载指令 ------LDRB 字节数据加载指令 ------LDRH 半字数据加载指令 ------STR 字数据存储指令 ------STRB 字节数据存储指令 ------STRH 半字数据存储指令 在本实验中主要用到了LDR和STR指令,下面将介 绍这两条指令的用法:
2012-5-17 深圳市优龙科技有限公司
上面是关于该实验涉及到的部分函数,完整的 代码请看光盘目录的exp文件夹下相应实验的工程 目录。 1.7 练习题 编写一个汇编代码,让LED灯D13不停的闪烁, 同时可以通过调节延迟时间来控制D13闪烁的频率。
2012-5-17
深圳市优龙科技有限公司
2012-5-17 深圳市优龙科技有限公司
1.6 ARM汇编程序编程实例 汇编程序编程实例 1.参考汇编代码程序 参考汇编代码程序,主要实现LED灯D14的不停 闪烁的功能,主要代码如下: ;汇编指令实验 ;定义端口E寄存器预定义 rGPFCON EQU 0x56000050 rGPFDAT EQU 0x56000054 rGPFUP EQU 0x56000058 AREA Init,CODE,READONLY ;该伪指令 定义了一个代码段,段名为Init,属性只读 ENTRY ;程序的入口点标识 ResetEntry
实验1_系统环境搭建
实验一系统开发环境建立实验目的:建立嵌入式系统开发所需要的硬件和软件环境,为以后进行嵌入式开发搭建平台。
实验硬件条件:1、电脑一台;(实验室为每一个学生都配有一台台式电脑可以满足开发要求。
个人电脑的配置主要要求内存至少2G,硬盘目前都很大,足以胜任。
这为嵌入式开发提供上位机平台)2、ARM嵌入式开发板一块及其相关接口线;(我们实验室为学生提供的友善之臂tiny6410开发板,为我们提供完整的嵌入式开发下位机平台。
全部接线包括:电源线,串口线,USB下载线和网线。
每一个学生拿到开发板都要认真检查接线是否齐全,有接线丢失一定要报告老师。
)实验软件条件:1、实体机系统要求:winxp和win7系统,均为32位系统。
(64位系统在兼容性方面还不完善,在接下来的实验中会遇到驱动无法安装等很多问题,不建议使用64位系统。
)2、vmware虚拟机软件和ubuntu10.04.65虚拟机系统实验步骤:为了方便做实验,实验室已经完全装配好了windows系统和vmware以及ubuntu系统,不需要学生自己搭建。
接下来的试验要按照实验步骤,一步一步的交会大家如何打开和使用虚拟机,以及ubuntu系统的基本指令和操作方法。
一、实验步骤1(这一步教会大家如何进入虚拟机系统)1.打开vmware打开vmware软件:电脑桌面上有名为VMware Workstation的图标,这就是vmware虚拟机平台软件。
双击打开。
2.项目2:打开ubuntu虚拟机系统在打开的窗口左侧:My Computer 下应该会有目前电脑上已经正好的ubuntu虚拟机,点击打开,出现下面的窗口。
点击Power onthis virtual machine 打开虚拟机,这之后会出现系统启动的一些信息,不用管慢慢等。
3.项目3:进入ubuntu系统点击tom ,然后在password后面输入密码123456 按回车键进入系统。
二、实验步骤2(进入系统之后,我们就要进行相关的操作,接下来将带大家熟悉ubuntu系统的基本操作指令。
具体分析触摸屏实验代码(1)--触摸屏接口寄存器介绍(ARM9 2440)
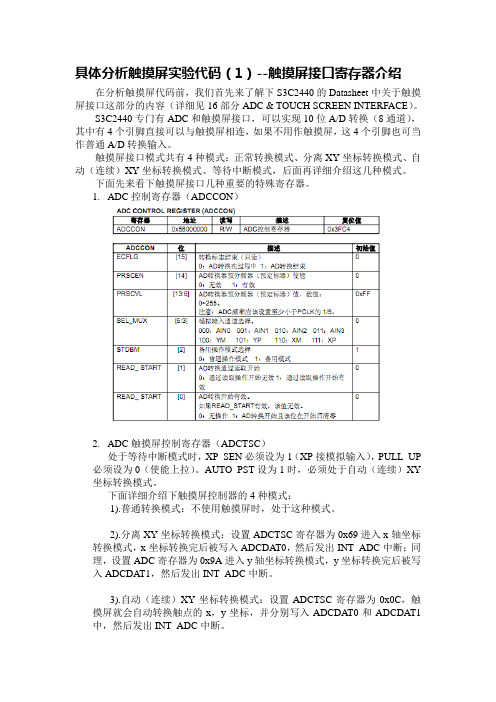
具体分析触摸屏实验代码(1)--触摸屏接口寄存器介绍在分析触摸屏代码前,我们首先来了解下S3C2440的Datasheet中关于触摸屏接口这部分的内容(详细见16部分ADC & TOUCH SCREEN INTERFACE)。
S3C2440专门有ADC和触摸屏接口,可以实现10位A/D转换(8通道),其中有4个引脚直接可以与触摸屏相连,如果不用作触摸屏,这4个引脚也可当作普通A/D转换输入。
触摸屏接口模式共有4种模式:正常转换模式、分离XY坐标转换模式、自动(连续)XY坐标转换模式、等待中断模式,后面再详细介绍这几种模式。
下面先来看下触摸屏接口几种重要的特殊寄存器。
1.ADC控制寄存器(ADCCON)2.ADC触摸屏控制寄存器(ADCTSC)处于等待中断模式时,XP_SEN必须设为1(XP接模拟输入),PULL_UP 必须设为0(使能上拉)。
AUTO_PST设为1时,必须处于自动(连续)XY 坐标转换模式。
下面详细介绍下触摸屏控制器的4种模式:1).普通转换模式:不使用触摸屏时,处于这种模式。
2).分离XY坐标转换模式:设置ADCTSC寄存器为0x69进入x轴坐标转换模式,x坐标转换完后被写入ADCDAT0,然后发出INT_ADC中断;同理,设置ADC寄存器为0x9A进入y轴坐标转换模式,y坐标转换完后被写入ADCDAT1,然后发出INT_ADC中断。
3).自动(连续)XY坐标转换模式:设置ADCTSC寄存器为0x0C,触摸屏就会自动转换触点的x,y坐标,并分别写入ADCDAT0和ADCDAT1中,然后发出INT_ADC中断。
4).等待中断模式:设置ADCTSC寄存器为0xD3。
这时等待屏被按下,当按下后发出INT_TC中断信号,这时触摸屏控制器转入2,3模式中的一种读取坐标。
3.ADC开始延时寄存器(ADCDLY)A=D*(1/X-Tal Clock) or A=D*(1/External Clock)B=D*(1/PCLK)C=D*(1/PCLK)D=ADCDL Y寄存器的DELAY值4.ADC转换数据寄存器0(ADCDAT0)5.ADC转换数据寄存器1(ADCDAT1)上面介绍了我们使用触摸屏需要用到的几个重要寄存器,并给出这些寄存器的地址以及每一位的用途,后面对于实际程序的分析再加以详细描述。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ARM技术原理与应用
实验报告
专业电子信息工程班级
学生姓名
学号
指导教师
2017年4月12 日
一、实验目的
(1)掌握ADS集成开发环境的创建;
(2)掌握ADS环境下工程创建;
(3)掌握ADS环境下汇编语言源程序创建、编辑、修改;
(4)掌握ADS环境下汇编语言源程序的汇编操作;
(5)掌握AXD环境下汇编语言程序的调试。
二、实验要求
1、实验必须在在ADS1.2环境下进行。
2、工程名、汇编语言源文件名按照下面规则命名:
工程名:pj+学号最后4位+其它字符
汇编语言源文件名:p+学号最后4位+其它字符+.s
例如:张维智同学学号最后4位是3134
因此,pj3134、pj3134a、pj31341等都是允许的工程名;而 p3134a.s、p3134b.s等都是允许的源文件名。
3、实验报告中需要说明实验中在ADS、AXD环境下进行的实际操作;
4、实验报告中应给出实际的实验操作及计算机的调试观察结果;
5、按照规定格式打印实验报告。
三、实验任务
1、在自己的笔记本电脑上安装ADS1.2ARM集成开发环境。
同时,操作实验室台式机上ADS1.2以便熟悉实验室的ADS1.2集成开发环境。
2、参考课件文档:ARM汇编语言程序设计实验环境与工具的使用-笔记本电脑版-v2.doc,创建pjxxxx工程。
3、创建pxxxx.s汇编语言源程序。
然后严格按照下面格式输入源程序。
AREA Example, CODE, READONLY
Entry
才ode32
START:
Mov R0,#5
MOV R2,#5 ;r2
MOV R0,0
mov R1,#0
LOOP:
CUP R1,R2
BHI ADD_END
ADD R0,R0 R1
ADD R1,R1,#1
B LOOP
ADD_end
B START
End
在实验报告中列出上面自己创建的pxxxx.s汇编语言源程序。
4、将pxxxx.s汇编语言源程序添加到pjxxxx工程中。
记录实验步骤和结果。
5、选Project->Make操作,对pxxxx.s汇编语言源程序进行汇编。
记录错误数,出错行的
行号。
6、修改pxxxx.s汇编语言源程序的语法错误,直到汇编成功为止。
在实验报告中列出最终正确的pxxxx.s汇编语言源程序。
7、单击工具栏中图标,进入AXD调试环境,对pxxxx进行调试。
选择Options→Configur Target…,将Configure配置Processor 为ARM920T。
8、点击Current前面的加号,展开当前模式寄存器组。
选Memory图标打开内存显示窗口,在下图下拉框中输入0x8000,代码从0x8000处存放。
观察实验现象。
9、熟悉工具条。
(1)单步执行10次,观察每次单步执行结果。
(2)在B LOOP语句处设置断点,点GO,执行程序。
观察实验现象。
(3)将光标移到B START语句处,点Run To Cursor,运行到光标处停下。
观察
实验结果。
(4)根据调试结果,说明pxxxx.s汇编语言源程序的功能。
四、实验步骤及结果
(要求根据实验内容,记录操作过程和实验现象、给出实验结果)
1、创建文件工程,工程名:pj3101a
2、创建源文件,命名为p3101.s,并在工程中添加源文件。
3、在源文件中写入程序代码,然后运行make,显示有错误
4、修改错误的程序代码,运行make,直到显示没有错误,然后点击Debug,打开AXD,进行AXD软件调试
5、进入AXD,开始设置AXD的运行调试环境,将Configure配置Processor 为ARM920T
6、代码从0x8000处存放
7、点击单步执行STEP,寄存器r0显示0x5
8、单步执行到11,寄存器r0的值为0x00,r1的值为0x00,r3的值为0x5
9、单步执行STEP到10
10、B LOOP语句处设置断点,执行go,寄存器r0的值为0x1,r1的值为0x2.
11、R0寄存器存放1+2+3+4+5的累加和
程序代码:
AREA EXAMPLE, CODE, READONLY
ENTRY
CODE32
START
MOV R0,#5; 立即数5送寄存器R0
MOV R2,#5; 立即数5送寄存器R1
MOV R0,#0; 立即数5送寄存器R0
MOV R1,#0; 立即数0送寄存器R1
LOOP
CMP R1,R2; 0跟5做比较
BHI ADD_end; 如果0>5,跳转ADD_end
ADD R0,R0,R1; 如果0<5,执行R1的值加R0的值送R0 ADD R1,R1,#1 ;R1的值加1送R1
B LOOP; 跳转到LOOP
ADD_end
B START; 跳转到START
END;结束
程序实现的功能:1+2+3+4+5=15的累加和
五、实验体会
1、运用软件,可以在软件上面看到寄存器存放的值,可以很明显地看到每单步执行一次程序的结果的值,可以方便我们清楚地了解到程序的每一步操作与每一步算法的结果,提高理解程序的能力。
2、借用调试软件,在很大的程度上,我们可以快速地检测程序代码是否出现了错误,从而进行修改加以修正,加快我们写程序代码的速度,以及节省了时间。