东大20秋学期《控制系统 Simulink 仿真》在线平时作业3答案
【东大】20秋学期《软件设计模式》在线平时作业3答案
20秋学期《软件设计模式》在线平时作业3
学校:东北大学学期:2020年秋季
一、单选题 (共 10 道试题,共 50 分)
1.C#中每个int 类型的变量占用_______个字节的内存。
A.1
B.2
C.4
D.8
[本题正确选择]:C
2.while语句循环语句结构和do…while语句循环结构的区别在于:
A.while语句的执行效率比较高
B.do…while语句编写程序较为复杂
C.do…while循环是先执行循环体,后判定条件表达式是否成立,而while语句是先判定条件表达式,再决定是否执行循环体
D.无论条件是否成立,while语句都要执行一次循环体
[本题正确选择]:C
3.如有定义:
class class1
{
Public virtual void test(){}
}
Class class2: class1
{
Public overrice void test()
{
Console.Write(“class2”);
}
}
Class class3: class2
{
Public override void test()
{
Console.Write(“class3”);
}
}
则下列语句的输出是什么?
Class2 x = new class3(); x.test();
A.class3 class2
B.class3
C.class2 class3。
东大22春《自动控制原理Ⅰ》在线平时作业3【参考答案】

《自动控制原理Ⅰ》在线平时作业3【参考答案】试卷总分:100 得分:100一、单选题 (共 25 道试题,共 100 分)1.给定量和扰动量都是自动控制系统的控制量。
A.是B.否标准答案:B2.调节时间的长短反映了系统的A.稳定性B.快速性C.平稳性D.准确性标准答案:B3.稳态误差越小,系统的稳态精度越低。
A.是B.否标准答案:B4.由系统的动态方程推导出传递函数的过程中,主要利用了拉氏变换的()。
A.位移性质B.微分性质C.积分性质D.终值定理标准答案:B5.在自动控制系统中,常用的数学模型有微分方程、传递函数、状态方程、传递矩阵、结构框图和信号流图等。
A.是B.否标准答案:A6.最大超调量反映了系统的平稳性。
A.是B.否标准答案:A7.对于最小相位系统,相位裕度小于零的时候表示闭环系统是稳定的。
()A.是B.否标准答案:B8.调节时间的长短反映了系统过渡过程时间的长短,它反映了系统的快速性。
A.是B.否标准答案:A9.自动控制系统按其主要元件的特性方程式的输入输出特性,可以分为线性系统和非线性系统。
A.是B.否标准答案:A10.最大超调量越大,说明系统过渡过程越不平稳。
A.是B.否标准答案:A11.非线性系统的暂态特性与其初始条件无关。
A.是B.否标准答案:B12.连续系统是指系统的各部分的信号都是模拟的连续函数。
A.是B.否标准答案:A13.系统(或环节)的频率特性是正弦函数作用下,在稳态状态下,系统(或环节)的输出量与输入量之比。
()A.是B.否标准答案:A14.对于最小相位系统,相频特性和幅值特性有唯一的对应关系。
()A.是B.否标准答案:A15.稳态误差越大,系统的稳态精度越高。
A.是B.否标准答案:B16.最大超调量越小,说明系统过渡过程越平稳。
A.是B.否标准答案:A17.{图}A.是B.否标准答案:B18.在自动控制系统中,被控制的设备或过程称为被控对象或对象。
A.是B.否标准答案:A19.按照控制系统中信号的传递方式,可将自动控制系统分为连续系统和离散系统。
东大20秋学期《冶金工程计算机控制与仿真》在线平时作业3

(单选题)1: 下列()不是测量仪表的技术性能指标。
A: 仪表精度
B: 灵敏度
C: 响应时间
D: 测量方法
正确答案: D
(单选题)2: 如右图所示的蒸汽加热器温度控制系统,被控对象为()。
A: 流体出口温度
B: 蒸汽加热器
C: 冷凝水出口温度
D: 流体
正确答案: B
(单选题)3: 右图所示为丙烯冷却器的控制方案示意图,图中所采用了()控制方案完成控制。
A: 串级
B: 选择性
C: 分程
D: 均匀
正确答案: B
(单选题)4: 某测温仪表范围为200~1000OC,根据工艺要求,温度指示值不允许超过plusmn;6℃,则应选仪表的精度等级为( )
A: 0.5级
B: 1.0级
C: 1.5级
D: 2.5级
正确答案: A
(单选题)5: 生物神经元的突触连接相当于神经元之间的( )。
A: 输人连接
B: 输出连接
C: 绝缘
D: 输人输出接口
正确答案: D
(单选题)6: 空气燃料双交叉系统可以实现燃料的充分燃烧,当系统增加负荷时其动作顺序是()。
A: 先增风,后增燃料
B: 先增燃料后增风
C: 先增风后减燃料
D: 先减燃料后增风
正确答案: A。
控制系统数字仿真蒋珉版参考答案

参考答案第 1 章1.1 系统、模型、仿真三者的关系:系统是被研究的对象,模型是对系统的描述,仿真是通过模型研究系统的一种工具或手段。
1.2 什么是数字仿真?什么是仿真模型?数学仿真的基本工具是数字计算机,因此也称为计算机仿真或数字仿真。
将数学模型通过一定的方式转变成能在计算机上实现和运行的数学模型,称之为仿真模型。
1.3 在应用仿真技术研究系统时,为什么要进行试验设计:因为仿真是在模型上做试验,是一种广义的试验。
因此,仿真基本上是一种通过试验来研究系统的综合试验技术,具有一般试验的性质。
而进行试验研究通常是需要进行试验设计。
1.4解析法和仿真法有何不同:解析法又称为分析法,它是应用数学推导、演绎去求解数学模型的方法。
仿真法是通过在模型上进行一系列试验来研究问题的方法。
利用解析法求解模型可以得出对问题的一般性答案,而仿真法的每一次运行则只能给出在特定条件下的数值解。
解析法常常是围绕着使问题易于求解,而不是使研究方法更适合于问题,常常因为存在诸多困难而不能适用。
从原则上讲,仿真法对系统数学模型的形式及复杂程度没有限制,是广泛适用的,但当模型的复杂程度增大时,试验次数就会迅速增加,从而影响使用效率。
1.5 仿真可用在哪些方面:应用于系统分析、系统设计、理论验证和训练仿真器等方面。
1.6[]xx x 2000010100017208=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=y u 1.7[]xx x 310001010001133=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=y u 1.8 25433)(232+++++=s s s s s s G 1.9[])(264.0368.00)()(001)(010*******.0368.1)1(k k y k u k k x x x =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=+第 2 章2.1 仿真模型见praxis2_1.mdl 。
奥鹏满分作业 东北大学《控制系统Simulink仿真》在线平时作业1
《控制系统Simulink仿真》在线平时作业1封装子系统不具有下列哪种优点?A:向子系统模块中传递参数,屏蔽用户不需要看到的细节。
B:子系统模块中不需要过多展现的内容。
C:可以提高Simulink对系统仿真速度。
D:保护子系统模块中的内容,防止模块实现被随意篡改。
答案:C使用下列哪种命令,以获取除仿真时间之外的所有仿真参数选项?A:sim()B:simsetC:simget()D:simulink答案:C下列对仿真步长的理解正确的是A:仿真起始时间B:仿真结束时间C:仿真时间段D:两次采样时间的时间差答案:D虚子系统不具有下列哪种特点?A:子系统只是系统模型中某些模块组的图形表示。
B:子系统中的模块在子系统中被排序执行。
C:子系统中的模块在执行时与其上一级模块统一被排序,不受子系统的限制。
D:在一个仿真时间步长内,Simulink可以多次进出一个子系统。
答案:B矩阵,在matlab环境中表示为()A:A=[2,1,6,3]B:BA=[2,1,6,3]C:A=[2;1;6;3]D:A=[63;12]答案:D过零信号不包括以下哪种类型?A:低电平B:上升沿C:下降沿D:双边沿答案:A用以描述系统系统状态变化过程的数学模型称为()。
A:动态模型B:静态模型C:物理模型D:实体模型答案:Amatlab中,如果A=[54;73],那么在matlab中A=()A:[54;73]B:[57;43]C:[35;47]D:[52;47]答案:B。
东大21年1月考试《控制系统 Simulink 仿真》考核作业参考答案
东北大学继续教育学院控制系统Simulink仿真试卷(作业考核线上2) A 卷(共 3 页)总分题号一二三四五六七八九十得分1.用以描述系统状态变化过程的数学模型称为动态模型。
对2.B=2:5执行后的结果为B=[2 3 4 5] 对3.plot(x,y,z)是用来绘制二维图形的。
错4.利用Simulink对动态系统进行的仿真的核心在于,MATLAB计算引擎对系统的微分方程和差分方程的求解。
对5.Simlink 允许改变模块的几何尺寸和模块颜色对6.积分器是建立连续系统微分方程的基础,也是建立连续系统模型的基础,一个积分器表示一阶积分,高级微分则是由多个积分器模块串联构成。
错7.Simulink中不包含专用模块库,是否正确?错8.设有矩阵A和矩阵B,可以用来求解矩阵方程对9.系统模型中模块的名称应该是唯一的。
对10.Matlab中的基本数据类型为向量和函数。
错二、选择题(每题2分)11.静态模型仅仅反映系统在平衡状态下系统特征值间的关系,这种关系常用(B)来描述。
A 微分方程B 代数方程C 差分方程D 线性方程\12.使用命令行save_system(‘vdp’),其功能描述为CA 建立一个新的Simulink系统模型。
B 打开一个已存在的Simulink系统模型。
C 保存一个Simulink系统模型。
D 关闭一个Simulink系统模型。
13.图中系统,包含几种模块( B )A 3B 4C 5D 614.能够完成信号组合的系统模块是(A)A MUXB BUS selectorC DemuxD BUS Creator15.连续系统一般用什么方式描述( A )。
A 微分方程B 差分方程C 代数方程D 逻辑描述 16. matlab 中A=[2 4; 3 3]表示( C )。
A ⎥⎦⎤⎢⎣⎡=4233AB ⎥⎦⎤⎢⎣⎡=4323AC ⎥⎦⎤⎢⎣⎡=3342AD ⎥⎦⎤⎢⎣⎡=3234A 17.以下哪些是matlab 绘图命令( ABC )。
东大20春学期《控制系统 Simulink 仿真》在线平时作业1
东大20春学期《控制系统Simulink 仿真》在线平时作业1
试卷总分:100 得分:100
一、单选题(共10 道试题,共50 分)
1.混合系统中一般采用那种求解器
A.离散步长求解器
B.混合步长求解器
C.定步长求解器
D.变步长求解器
答案:D
2.在MATLAB Fun模块中所调用的函数所拥有的输出个数有几个
A.4
B.3
C.2
D.1
答案:D
3.定步长连续求解器有几种方法
A.8
B.7
C.6
D.5
答案:D
4.下列哪条命令可以旋转Simlink模块
A.Show Drop Shadow
B.Rotate Block
C.Foreground color
D.Flip Block
答案:D
5.原子子系统不具有下列哪种特点?
A.子系统作为一个整体进行仿真,其功能类似于一个单独的系统模块。
B.子系统为一“实际”的模块,需要按照顺序连续执行。
C.子系统中的模块在子系统中被排序执行。
D.在一个仿真时间步长内,Simulink可以多次进出一个子系统。
答案:D
6.使用命令行gcb(’sys’),其功能描述为
A.返回指定系统模型中当前模块的路径名。
B.返回当前系统模型中当前模块的路径名。
C.返回当前系统模型中当前模块的操作句柄。
D.获得当前系统模型的路径名。
答案:A。
东北大学22春“电气工程及其自动化”《控制系统 Simulink 仿真》作业考核题库高频考点版(参考

东北大学22春“电气工程及其自动化”《控制系统 Simulink 仿真》作业考核题库高频考点版(参考答案)一.综合考核(共50题)1.利用断点模块可以对系统进行反复逐时间步调试。
()A.错误B.正确参考答案:B2.使用命令行close_system(‘sys’),其功能描述为()A.打开一个已存在的Simulink系统模型B.建立一个新的Simulink系统模型C.关闭一个Simulink系统模型D.保存一个Simulink系统模型参考答案:C3.反应系统在平衡状态下的特征的模型称为静态模型。
()A.正确B.错误参考答案:A4.使用命令行bdroot(‘obj’),其功能描述为()。
A.返回包含指定对象名称的顶层系统的名称B.返回指定系统模型中当前模块的路径名C.获得当前系统模型的路径名D.返回当前系统模型中当前模块的操作句柄参考答案:A微分方程的不同数值求解方法对应着不同的连续求解器。
()A.错误B.正确参考答案:B6.使用Crtl+Enter组合可以使系统模型充满整个视图窗口。
()A.错误B.正确参考答案:A7.对于系统模型中相同的模块,Simlink会对其进行自动编号。
()A.错误B.正确参考答案:B8.使用命令行gcs,其功能描述为()A.返回指定系统模型中当前模块的路径名B.返回当前系统模型中当前模块的路径名C.返回当前系统模型中当前模块的操作句柄D.获得当前系统模型的路径名参考答案:D9.为设置系统模型或其中模块的回调函数。
应使用下列哪一种命令?()A.simsetB.set_paramC.simgetD.get_param参考答案:B10.Simlink调试器提供了几种断点条件设置?()A.8B.7C.6D.5参考答案:B11.下图所示的模型作为最顶层的系统模型使用时,可以通过它们从MATLAB工作空间中输入信号并将计算结果输出到MATLAB工作空间中。
()A.错误B.正确参考答案:B12.在一个系统模块中允许有多个Enable或Trigger信号。
Simulink实验作业及答案
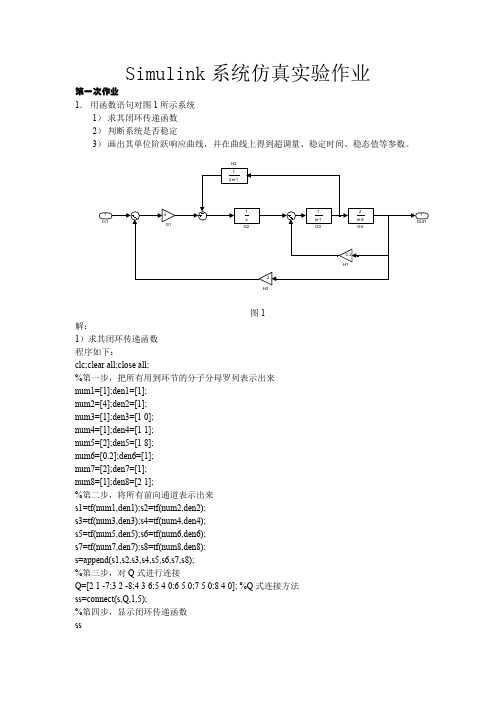
Simulink系统仿真实验作业第一次作业1.用函数语句对图1所示系统1)求其闭环传递函数2)判断系统是否稳定3)画出其单位阶跃响应曲线,并在曲线上得到超调量、稳定时间、稳态值等参数。
图1解:1)求其闭环传递函数程序如下:clc;clear all;close all;%第一步,把所有用到环节的分子分母罗列表示出来num1=[1];den1=[1];num2=[4];den2=[1];num3=[1];den3=[1 0];num4=[1];den4=[1 1];num5=[2];den5=[1 8];num6=[0.2];den6=[1];num7=[2];den7=[1];num8=[1];den8=[2 1];%第二步,将所有前向通道表示出来s1=tf(num1,den1);s2=tf(num2,den2);s3=tf(num3,den3);s4=tf(num4,den4);s5=tf(num5,den5);s6=tf(num6,den6);s7=tf(num7,den7);s8=tf(num8,den8);s=append(s1,s2,s3,s4,s5,s6,s7,s8);%第三步,对Q式进行连接Q=[2 1 -7;3 2 -8;4 3 6;5 4 0;6 5 0;7 5 0;8 4 0]; %Q式连接方法ss=connect(s,Q,1,5);%第四步,显示闭环传递函数ss运行结果:Transfer function:8 s + 4--------------------------------------s^4 + 9.5 s^3 + 12.1 s^2 + 20.3 s + 122)判断系统是否稳定程序如下:clear all;clcnum=[1 1 2 2 3 5];den=1;%第一步,求系统特征方程s=tf(num,den);%第二步,求系统特征方程的根si=roots(num);%第三步,求出特征根矩阵的大小[m n]=size(roots(num));%第四步,求特征根虚部gen=imag(si)l=0;%第五步,判断是否有虚部大于0;否则g=0for i=1:m*nif(gen(i)>0)l=l+1;endendif(l>0)disp('系统不稳定')end运行结果:gen =1.1656-1.16561.3375-1.3375系统不稳定3)画出其单位阶跃响应曲线,并在曲线上得到超调量、稳定时间、稳态值等参数。
20秋学期《控制系统 Simulink 仿真》在线平时作业2
20秋学期《控制系统Simulink仿真》在线平时作业2仿真运行阶段不包括以下哪项工作?A:计算输出。
B:更新离散状态。
C:计算连续状态。
D:检查信号的宽度与连接。
答案:Dmatlab中B=1:3表示()A:style=FONT-FAMILY:'宋体';FONT-SIZE:10.5pt;mso-spacerun:'yes' B:style=FONT-FAMILY:'宋体';FONT-SIZE:10.5pt;mso-spacerun:'yes' C:style=FONT-FAMILY:'宋体';FONT-SIZE:10.5pt;mso-spacerun:'yes' D:答案:D下列哪项操作可以对系统模型框图进行注释A:双击系统模型编辑器的背景B:双击Simlink模块C:双击信号线D:Crtl+D答案:A求的根()A:roots()B:p=[113];roots(p)C:,roots(p)D:conv()答案:B下列哪条命令可以改变Simlink模块颜色A:RotateBlockB:ShowDropShadowC:FlipBlockD:Foregroundcolor答案:D为返回线性化后系统的传递函数描述。
应使用下列哪一种命令?A:[A,B,C,D]=linmod(’sys’,x,u);B:[num,den]=linmod(’sys’,x,u);C:[Ad,Bd,Cd,Dd]=dlinmod(’sys’,Ts,x,u);D:[numd,dend]=dlinmod(’sys’,Ts,x,u);答案:D矩阵,在matlab环境中表示为()A:A=[2,1,6,3]B:BA=[2,1,6,3]C:A=[2;1;6;3]D:A=[63;12]答案:DScope模块中可以设置几个坐标系数目A:1B:2C:3D:无限制。
东大20秋学期《数字信号处理器原理及应用》在线平时作业3参考答案
C.前半个周期有效
D.在后半个周期有效
答案:A
二、判断题(共10道试题,共50分)
11.Q30格式的数据可以表达-π―π之间的范围
答案:错误
12.软件改变系统工作频率时,可以立即生效,无需等待。
答案:错误
13.C281x数字信号处理器上的ADC模块将外部的模拟信号转换为数字量,ADC模块可以转换一个控制信号进行滤波或者实现运动系统的闭环控制。
非标准劳动关系面对的挑战
我国的非标准劳动关系是在市场经济快速发展,就业形式日益严峻的大背景下产生并发展起来的,更多的是缓解就业压力的产物。由于国有企业改革,我国的城镇失业率一直居高不下,而传统的僵化的固定就业模式刚性太大,不利于缓解就业压力。非标准劳动关系对于降低用人单位的用工成本、方便劳动者自由选择劳动时间、缓解就业压力、扩大就业机会等作用越来越突出,正成为就业的重要渠道,使劳动关系呈现出多元化、复杂化格局。非标准劳动关系突破了标准劳动关系的内涵,对原有的劳动关系法律调整机制提出了新的挑战。随着非标准劳动关系的不断发展,我国传统的标准劳动关系法律调整体系已经越来越不适应非标准劳动关系调整的需求。非标准劳动关系对传统法律的挑战主要体现在以下几方面:
答案:正确
20.32位的28xx系列DSP整合了DSP和微控制器的最佳特性,能够在单周期内完成32x32位的乘法累加运算,或两个16x16位乘法累加运算。
答案:正确
以下内容可以删除:
非标准劳动关系是从标准劳动关系发展而来。标准劳动关系是一种典型的劳动契约关系,产生于资本主义社会,并一直延续至今。自20世纪60年代始,随着经济的迅速发展,信息技术的普遍应用,各国的产业结构和知识结构发生了巨大变化,进而要求劳动力作为生产要素流动性增强,灵活就业、弹性就业需求增大。因为,在工业、机械制造业占主导的产业结构模式下,固定用工制度、长期就业合同是主流的用工和就业形式,但随着商业、服务业的不断扩大,简单、统一的传统就业形式已经不能满足劳动关系双方主体的自身需求,取而代之的应是形式灵活、富于弹性的就业形式,非标准劳动关系也就应运而生。一方面,企业可以根据市场的需求变化,通过灵活多样的用工形式来雇佣非核心员工,弹性用工能够降低企业劳动力成本,提高企业竞争力,追逐利益最大化。“企业想要更好的迎接全球化带来的巨大的挑战,人力资源的运用必须要有弹性,也就是劳动弹性化。”
[东大]20秋学期《中国近代史纲要X》在线平时作业3答案辅导资料
![[东大]20秋学期《中国近代史纲要X》在线平时作业3答案辅导资料](https://img.taocdn.com/s3/m/30652bd327d3240c8447efc2.png)
[东北大学]20秋学期《中国近代史纲要X》在线平时作业3
前言:请读者认真阅读本套试卷,确定是您需要的学习资料在下载!!
一、单选题 (共 20 道试题,共 60 分)
1.在共产党与民主党派的关系上,毛泽东首倡的方针是()
A项.加强团结,共同发展
B项.长期共存,互相监督
C项.和平共处,同舟共济
D项.肝胆相照,荣辱与共
[正确选择答案]:B
2.日本制造的策动华北五省二市“防共自治”运动的事变是()
A项.九一八事变
B项.华北事变
C项.卢沟桥事变
D项.一二八事变
[正确选择答案]:B
3.全国性抗战开始后,中国军队的第一次重大胜利是( )
A项.长沙会战
B项.平型关战役
C项.台儿庄战役
D项.淞沪会战
[正确选择答案]:B
4.官僚资本的垄断活动首先和主要的方面是在()
A项.工业
B项.金融业
C项.农业
D项.交通运输业
[正确选择答案]:B
5.标志着第一次国共合作的正式形成的历史事件是()
A项.共产党一大的成功召开
B项.共产党二大的成功召开
C项.共产党三大的成功召开
D项.国民党一大的成功召开
[正确选择答案]:D
6.我国实现对资本主义工商业社会主义改造的主要形式是( )
A项.国家资本主义
B项.公私合营
C项.统购统销。
最新奥鹏东北大学20秋学期《实用写作》在线平时作业3-参考答案
东北大学东大奥鹏远程教育东北大学20秋学期《实用写作》在线平时作业3参考答案试读一页20秋学期《实用写作》在线平时作业31. 《细菌是怎样发现的?》作者是(),被称作科学文艺中的轻骑兵。
【选项】:A 顾均正B 陈望道C 高士其D 贾祖璋【答案】:C2. 贺信与祝辞都属于()中祝贺类文书。
【选项】:A 法律文体B 新闻文体C 公关礼仪文体D 科技文体【答案】:C3. 求职信具有针对性、自荐性、独特性和()等特点。
【选项】:A 礼仪性B 目的性C 功利性D 简明性【答案】:A4. ()是指党政机关、社会团体、企事业单位的领导者或工作人员在任职期间或任职结束后向上级领导及所属单位的公众所做的任职以来的工作总结报告。
【选项】:A 工作总结B 述职报告C 工作规划D 任期总结【答案】:B5. 按研究工作进程划分,科技报告可分为选题报告、论证报告、申请报告、进展报告和()。
【选项】:A 保密报告B 解密报告C 成果报告D 非密报告【答案】:C6. 从起诉或审判中是否存在逻辑错误入手提出辩护理由,叫做()。
【选项】:A 事实辩B 逻辑辩C 法律辩D 程序辩【答案】:B7. ()专用于追悼大会,由一定身份的人进行宣读。
它是对在场参加追悼的同志讲话,而不是对逝者讲话。
【选项】:A 抒情类悼词B 议论类悼词C 宣读体悼词D 书面悼词【答案】:C8. 以广告主为标准可将商业广告划分为一般广告和()。
【选项】:A 企业广告B 图片广告C 零售广告D 消费者广告【答案】:C9. 对某项具体行政工作或活动提出要求和规范程序的文书称作()。
【选项】:A 条例B 细则C 规定D 规程【答案】:C10. ()总结署名在正文后右下方。
【选项】:A 部门B 单位C 组织D 个人【答案】:D11. 简报的版尾包括发送范围和()两个基本内容。
【选项】:A 编发部门B 印发的份数C 日期D 结论【答案】:B12. 按照《中华人民共和国经济合同法》第二章经济合同的订立和履行第十二条规定,合同应该具备标的、数量和质量、价款或酬金、履行的期限、地点和方式以及()等条款。
控制系统数字仿真习题答案
控制系统数字仿真与CAD第二章习题答案2-1 思考题:(1)数学模型的微分方程,状态方程,传递函数,零极点增益和部分分式五种形式,各有什么特点?(2)数学模型各种形式之间为什么要互相转换?(3)控制系统建模的基本方法有哪些?他们的区别和特点是什么?(4)控制系统计算机仿真中的“实现问题”是什么含意?(5)数值积分法的选用应遵循哪几条原则?答:(1)微分方程是直接描述系统输入和输出量之间的制约关系,是连续控制系统其他数学模型表达式的基础。
状态方程能够反映系统内部各状态之间的相互关系,适用于多输入多输出系统。
传递函数是零极点形式和部分分式形式的基础。
零极点增益形式可用于分析系统的稳定性和快速性。
利用部分分式形式可直接分析系统的动态过程。
(2)不同的控制系统的分析和设计方法,只适用于特定的数学模型形式。
(3)控制系统的建模方法大体有三种:机理模型法,统计模型法和混合模型法。
机理模型法就是对已知结构,参数的物理系统运用相应的物理定律或定理,经过合理的分析简化建立起来的各物理量间的关系。
该方法需要对系统的内部结构和特性完全的了解,精度高。
统计模型法是采用归纳的方法,根据系统实测的数据,运用统计规律和系统辨识等理论建立的系统模型。
该方法建立的数学模型受数据量不充分,数据精度不一致,数据处理方法的不完善,很难在精度上达到更高的要求。
混合法是上述两种方法的结合。
(4)“实现问题”就是根据建立的数学模型和精度,采用某种数值计算方法,将模型方程转换为适合在计算机上运行的公式和方程,通过计算来使之正确的反映系统各变量动态性能,得到可靠的仿真结果。
(5)数值积分法应该遵循的原则是在满足系统精度的前提下,提高数值运算的速度和并保证计算结果的稳定。
2-2.用matlab语言求下列系统的状态方程、传递函数、零极点增益、和部分分式形式的模型参数,并分别写出其相应的数学模型表达式:(1) G(s)=324327242410355024s s ss s s s+++++++(2).X=2.25 -5 -1.25 -0.542.25 -4.25 -1.25 -0.2520.25 -0.5 -1.25 -121.25 -1.75 -0.25 -0.75 0X⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦u y=[0 2 0 2] X(1)解:(1)状态方程模型参数:编写matlab程序如下>> num=[1 7 24 24];>> den=[1 10 35 50 24];>> [A B C D]=tf2ss(num,den)得到结果:A=-10 -35 -50 -241 0 0 00 1 0 00 0 1 0⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦,B=1⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦,C=[]1 7 24 24,D=[0]所以模型为:.X=-10 -35 -50 -241 0 0 00 1 0 00 0 1 0⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦X+1⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦u,y=[]1 7 24 24X(2)零极点增益:编写程序>> num=[1 7 24 24];>> den=[1 10 35 50 24];>> [Z P K]=tf2zp(num,den)得到结果Z= -2.7306 + 2.8531 , -2.7306 - 2.8531i ,-1.5388P= -4, -3 ,-2 ,-1K=1(3) 部分分式形式:编写程序>> num=[1 7 24 24]; >> den=[1 10 35 50 24];>> [R P H]=residue(num,den) 得到结果R= 4.0000 ,-6.0000, 2.0000, 1.0000 P= -4.0000, -3.0000 , -2.0000 ,-1.0000 H=[]G(s)=46214321s s s s -+++++++(2)解:(1)传递函数模型参数:编写程序>> A=[2.25 -5 -1.25 -0.52.25 -4.25 -1.25 -0.250.25 -0.5 -1.25 -1 1.25 -1.75 -0.25 -0.75];>> B=[4 2 2 0]'; >> C=[0 2 0 2];>> D=[0];>> [num den]=ss2tf(A,B,C,D)得到结果num = 0 4.0000 14.0000 22.0000 15.0000 den =1.0000 4.0000 6.2500 5.2500 2.2500324324 s + 14 s + 22 s + 15()s + 4 s + 6.25 s + 5.25 s + 2.25G s =(2) 零极点增益模型参数:编写程序>> A=[2.25 -5 -1.25 -0.52.25 -4.25 -1.25 -0.25 0.25 -0.5 -1.25 -1 1.25 -1.75 -0.25 -0.75];>> B=[4 2 2 0]'; >> C=[0 2 0 2];>> D=[0];>> [Z,P,K]=ss2zp(A,B,C,D)得到结果Z =-1.0000 + 1.2247i -1.0000 - 1.2247i -1.5000P= -0.5000 + 0.8660i -0.5000 - 0.8660i -1.5000-1.5000K = 4.0000表达式 ()()()()()4s+1-1.2247i s+1+1.2247i ()s+0.5-0.866i s+0.5+0.866i s+1.5G s =(3)部分分式形式的模型参数:编写程序>> A=[2.25 -5 -1.25 -0.52.25 -4.25 -1.25 -0.25 0.25 -0.5 -1.25 -1 1.25 -1.75 -0.25 -0.75];>> B=[4 2 2 0]'; >> C=[0 2 0 2];>> D=[0];>> [num den]=ss2tf(A,B,C,D)>> [R,P,H]=residue(num,den)得到结果R = 4.0000 -0.0000 0.0000 - 2.3094i 0.0000 +2.3094iP = -1.5000 -1.5000 -0.5000 + 0.8660i -0.5000 -0.8660iH =[]4 2.3094 2.3094() 1.50.50.8660.50.866i iG s s s i s i=-+++-++2-3.用欧拉法求下面系统的输出响应y(t)在0≤t ≤1上,h=0.1时的数值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
20秋学期《控制系统Simulink 仿真》在线平时作业3
试卷总分:100 得分:100
一、单选题(共10 道试题,共50 分)
1.使用命令行bdroot(’obj’),其功能描述为
A.返回包含指定对象名称的顶层系统的名称。
B.返回指定系统模型中当前模块的路径名。
C.获得当前系统模型的路径名。
D.返回当前系统模型中当前模块的操作句柄。
答案:A
2.使用命令行gcb(’sys’),其功能描述为
A.返回当前系统模型中当前模块的路径名。
B.返回指定系统模型中当前模块的路径名。
C.获得当前系统模型的路径名。
D.返回当前系统模型中当前模块的操作句柄。
答案:B
3.离散系统一般用什么方式描述()。
A.微分方程
B.差分方程
C.代数方程
D.逻辑描述
答案:B
4.matlab中,如果A=[5 4; 7 3],那么在matlab中A’=()
A.[5 4; 7 3]
B.[5 7; 4 3]
C.[3 5; 4 7]
D.[5 2; 4 7]
答案:B
5.使用命令行save_system(‘vdp’),其功能描述为
A.建立一个新的Simulink系统模型。
B.打开一个已存在的Simulink系统模型。
C.保存一个Simulink系统模型。
D.关闭一个Simulink系统模型。
答案:C
6.静态模型仅仅反映系统在平衡状态下系统特征值间的关系,这种关系常用()来描述
A.微分方程
B.代数方程
C.差分方程
D.线性方程
答案:B。