驱动器故障代码Word版
力士乐报警代码及说明一揽定稿版

力士乐报警代码及说明一揽精编W O R D版 IBM system office room 【A0816H-A0912AAAHH-GX8Q8-GNTHHJ8】力士乐报警代码及说明一揽力士乐驱动器报警代码查询,有用力士乐驱动器的工程师,可以转载查询。
DKC故障诊断1诊断信息F和诊断信息E的说明1.1?错误诊断信息FF205凸轮轴故障F207切换至未初始化运行模式F208UL电机类型已变F209PL装载参数默认值F211DISC-Errorno.1(1#错误)F212F212F212DISC-Errorno.2(2#错误)DISC-Errorno.3(3#错误)DISC-Errorno.4(4#错误) F217未接冷却风扇F218放大器过热关机F219电机过热关机F220制动电阻器过载关机F221电机温度监控器故障F223?停止轴时的初始化过程错误F224超过最大制动时间F226功率部分欠电压F228?过大偏差F229编码器1故障:象限错误F230超过编码器1最大信号频率F236位置反馈的差值过大F237?位置指令的差值过大F238实际速度值的差值过大F242编码器2故障:信号幅度错误F245编码器2故障:象限错误F246超过编码器2最大信号频率F248?电池电压过低F249主驱动器编码器故障:信号太小F250?目标位置预置内存溢出F252主驱动器编码器故障:象限错误F253增量编码器仿真:脉冲频率太高F260?指令电流极限关闭F262状态输出口出现外部短路F267内部硬件同步错误F269电机制动器释放过程中错误F276绝对编码器超出允许的窗口F277?电流测量补偿错误F281主回路故障F288EMD模块固件升级过程中出现错误 F291EMD模块超时F292EMD模块过热F294Ecox客户端超时F296Ecox客户端数量不准确F297Ecox客户端错误F386电源模块没有就绪信号F401双MST故障关机F402双MDT故障关机F403通信阶段关机F404阶段前进过程中出现错误F405?阶段后退过程中出现错误F406阶段切换无就绪信号F407?主通信初始化过程中的错误F411双SST故障关机F434紧停E-STOPF629超过正行程极限F630超过负行程极限F634紧停E-STOPF643?探测到正行程极位开关F644探测到负行程限位开关F811换算偏置无法确定F812?在换算过程中移动越程F822编码器1故障:信号幅度错误F843编码器2故障:信号幅度错误F845编码器2故障:象限错误F850?看门狗协处理器F860过流:功率部分有短路F870+24v直流错误F873电源驱动部分故障F878速度环错误F880经过优化的换算偏置错误1.2?报警诊断信息EE211DISC-#1报警E212E212E212DISC-#2报警DISC-#3报警DISC-#4报警E217冷却风扇转速太慢E221?报警电机温度监控有故障E225电机过载E226功率部分欠电压E247插补速度=0E248?插补加速度=0E249定位速度>=S-0-0091E250驱动器过热预报警E251电机过热预报警E252制动电阻器过载预报警E253?目标位置超出行程范围E254未回零E255进给倍率S-0-108=0E256?转矩限制=0E257连续电流限制活动E258选定的处理块未编程E259指令速度限制活动261?连续电流限制预报警E263速度指令值>极限S-0-0091E264?目标位置超过数字范围E267硬件同步有故障E269制动器的制动转矩太低E281主回路故障E288EMD模块固件升级活动EMD模块超时EMD模块欠电压Ecox客户端数量不准确E289等待Ecox服务器端扫描E291E293E296 E386电源模块无就绪信号E408MDT数据存储器A无效编址E409AT数据存储器A无效编址E410客户端未被扫描或地址为0E411双SST故障E825功率部分过电压E826功率部分欠电压E829超过正位置极限E830超过负位置极限E831在点动过程中达到位置极限E834紧停E-STOPE843?正限位开关活动E844负限位开关活动E881主回路故障E886电源模块没有准备好信号2诊断信息B、C、D和诊断信息A的说明2.1指令诊断信息B、C和DB100指令释放电机制动器B101?指令未使能B200制动器检查指令B201只在驱动器使能时进行制动器检查B202在制动器嵌入过程中出现错误B203制动器制动转矩太低 B300后备工作内存过程指令C100通讯阶段3转换检查C101无效通信参数(S-0-0021)C102?通信参数极限错误(S-0-0021)C104MDT的配置IDN不可配置C105配置长度大于MDT最大长度C106AT的配置IDN不可配置C107配置长度大于AT最大长度C108时间片参数大于Sercos循环时间C109MDT(S-0-0009)中的数据记录位置为偶数C110MDT(S-0-0010)长度为奇数C1111D9+记录长度-1大于长度MDT(S-0-0010) C112TNcyc(S-0-0001)或TScyc (S-0-0002)错误C113TNcyc(S-0-0001)与TScyc(S-0-0002)的关系错误C114T4大于TScyc(S-0-0002)-T4min(S-0-0005)C115T2数值太小C118MDT配置顺序错误C200通讯阶段4转换检查C201无效参数(S)(->S-0-0022)C202参数极限错误(->S-0-0022)C203参数计算错误(->S-0-0022)C204电机类型P-0-4014不准确C210要求反馈2(->S-0-0022)C211无效反馈数据(->S-0-0022)C212无效放大数据(->S-0-0022)C213?位置数据比例错误C214速度数据比例错误C215加速度数据比例错误C216?转矩/力数据比例错误C217反馈1数据读取错误C218反馈2数据读取错误C220反馈1初始化错误C221反馈2初始化错误C223?最大范围输入值太高C227模范围错误C234编码器不能组合C235负载侧电机编码器只可用于感应电机C236要求反馈1(P-0-0074)C238编码器2功能错误(->S-0-0022)C241必须为二进制编码器分辨率C242?一个参数的多重配置(->S-0-0022)C300指令设定绝对测量C302未安装绝对测量系统C400切换至参数方式 C401驱动器使能时,不允许切换C402?只允许在没有上位控制时C500复位1类诊断,错误复位C600驱动器控制的回零过程指令C601只在驱动器使能时才能够回零C602距离回零开关-参考标记错误C604绝对编码器不能回零C606未探测出参考标记C700基本参数装载C702默认参数不可用C703?默认参数无效C704参数不可拷贝C800调入默认参数C801?参数默认值错误(->S-0-0021)C802密码锁定D300指令调整换算D301?驱动器未做好换算指令准备D302电机转矩/力太小,无法运动D303指令启动时驱动器处于控制状态D304偏置计算错误D305驱动器使能被拒绝D306系统断电D307驱动器不运动D308无法调整异步电机D309进入阶段4D310输入主密码D311?不能确定换算偏置D312在换算过程中超过运动范围D500指令获取标志位置D501要求增量编码器D600?取消回参考点过程指令D700轴禁止指令D701仅可在驱动器无使能时使用轴禁止指令D800测量轮模式指令D801测量轮不能运行D900?自动控制环调整指令D901启动要求驱动器使能D902电机反馈数据无效D903?惯量检测失败D904增益调整失败D905位移范围无效,P-0-0166和P-0-0167D906?位移范围超出2.2状态诊断信息AA000通讯阶段0A001通讯阶段1A002A003A009通讯阶段2通讯阶段3SERCOS接口的自动波特率检测A010?驱动停止A012控制和功率部分运行准备就绪A013接通电源准备就绪A100?驱动器处于转矩控制模式下A101驱动器处于速度控制模式下A102使用编码器1的位置模式A103使用编码器2的位置模式A104位置模式,无滞后,编码器1A105位置模式,无滞后,反馈2A106驱动器控制的插补,编码器1A107驱动器控制的插补,编码器2A108驱动器控制的插补,无滞后,编码器1 A109驱动器控制的初步,无滞后,编码器2A110?速度同步,虚拟主驱动器A111速度同步,真实主驱动器A112相位同步,编码器1,虚拟主驱动器A113相位同步,编码器2.虚拟主驱动器A114相位同步,编码器1.真实主驱动器A116相位同步,无滞后,编码器1,虚拟主驱动器A117相位同步,无滞后,编码器2,虚拟主驱动器A118相位同步,无滞后,编码器1,真实主驱动器A128凸轮轴,编码器1,虚拟主驱动器A129凸轮轴,编码器2,虚拟主驱动器A130凸轮轴,编码器1,真实主驱动器A132凸轮轴,无滞后,编码器1,虚拟主驱动器A133凸轮轴,无滞后,编码器2,虚拟主驱动器A134凸轮轴,无滞后,编码器1,真实主驱动器A150驱动器控制的定位,编码器1A151驱动器控制的定位,编码器1,无滞后A152驱动器控制的定位,编码器2A153驱动器控制的定位,编码器2,无滞后A154编码器1,驱动器受控的位置模式A155编码器1,无滞后,驱动器受控的位置模式A156编码器2,驱动器受控的位置模式A157编码器2,无滞后,驱动器受控的位置模式A206 数据处理块模式,编码器 1A207 数据处理块模式,无滞后,编码器 1A208 正向点动模式A210 数据处理块模式,编码器 2A211 数据处理块模式,无滞后,编码器 2 A218 负向点动模式A400 自动的驱动器检查和调整A401 驱动器减速至自动模式A402 驱动器处于自动模式A800 不明运行模式力士乐伺服驱动器故障代码故障代码C0270 故障描述电机编码器数据读取错误电机的型号参数 P-0-4014 有误。
安川伺服驱动器的常用故障代码

安川伺服驱动器的常用故障代码关键信息项:1、故障代码列表2、故障代码含义3、可能的故障原因4、故障诊断方法5、故障解决措施1、故障代码列表11 A00 过电流111 A02 过电压112 A03 低电压113 A04 过载114 A05 再生过载115 A10 过热116 A30 再生异常117 A40 主电路检测异常118 A51 超速119 A71 过载高120 A72 过载低121 A73 动态制动过载122 A74 紧急停止123 A81 编码器备份警报124 A82 编码器和数校验警报125 A83 编码器电池警报126 A84 编码器数据警报127 A85 编码器过速警报128 A90 编码器故障129 A91 位置偏差过大130 A92 电机过载2、故障代码含义21 A00 过电流:表示驱动器输出电流超过了允许的最大值。
22 A02 过电压:驱动器的直流母线电压超过了规定的上限值。
23 A03 低电压:直流母线电压低于规定的下限值。
24 A04 过载:电机的负载超过了驱动器的额定负载能力。
25 A05 再生过载:再生能量超过了驱动器的处理能力。
26 A10 过热:驱动器内部温度过高。
27 A30 再生异常:再生电路工作不正常。
28 A40 主电路检测异常:主电路的检测环节出现故障。
29 A51 超速:电机转速超过了设定的最高速度。
210 A71 过载高:负载超过了驱动器的高过载设定值。
211 A72 过载低:负载超过了驱动器的低过载设定值。
212 A73 动态制动过载:动态制动过程中出现过载。
213 A74 紧急停止:系统触发了紧急停止信号。
214 A81 编码器备份警报:编码器的备份数据出现问题。
215 A82 编码器和数校验警报:编码器的数据校验错误。
216 A83 编码器电池警报:编码器的电池电量低或故障。
217 A84 编码器数据警报:编码器的数据传输或处理出现异常。
218 A85 编码器过速警报:编码器的转速超过了允许范围。
德诚驱动器故障代码大全
德诚驱动器故障代码大全
【原创版】
目录
1.德诚驱动器故障代码概述
2.德诚驱动器故障代码的解决方法
3.德诚驱动器故障代码的预防措施
正文
【德诚驱动器故障代码大全】
在现代社会中,驱动器已经成为了计算机硬件中不可或缺的组成部分。
其中,德诚驱动器以其稳定的性能和优秀的品质,赢得了广大消费者的青睐。
然而,作为电子产品,德诚驱动器在使用过程中也会出现故障,而故障代码就是这些故障的表现形式。
【德诚驱动器故障代码的解决方法】
当德诚驱动器出现故障时,我们首先需要做的就是查看故障代码。
一般来说,德诚驱动器的故障代码都会以特定的格式显示在计算机屏幕上,例如“Error Code: 0x00000001”等。
然后,我们可以通过查询相关的代码表,了解该故障代码的具体含义和解决方法。
通常,解决方法包括重启计算机、更新驱动程序、更换硬件等。
【德诚驱动器故障代码的预防措施】
虽然我们无法完全避免德诚驱动器的故障,但是我们可以通过一些预防措施,降低故障发生的可能性。
首先,定期更新驱动程序是一个有效的预防措施。
更新驱动程序不仅可以提高驱动器的性能,还可以修复一些已知的故障。
其次,定期对德诚驱动器进行清洁和维护,也可以有效地防止故障的发生。
最后,使用正品的德诚驱动器,避免使用质量不合格的驱动器,也是预防故障的重要措施。
总的来说,德诚驱动器的故障代码大全是我们解决和预防德诚驱动器故障的重要工具。
安川伺服驱动器的常用故障代码[1]讲解学习
![安川伺服驱动器的常用故障代码[1]讲解学习](https://img.taocdn.com/s3/m/fdaf3847ff00bed5b9f31dd4.png)
安川伺服驱动器的常用故障代码[ 1]安川伺服驱动器的常用故障代码绝对值错误或没收到用户参数检测不到用户参数设置超出允许值 电源变压器过流再生电路检查错误位置错误,脉冲超出参数Cn-1E 设定值 主电路电压出错 电机转速过快电机几秒至几十秒过载运行 电机过载下连续运行绝对值编码器每转脉冲数出错 ssszxx f 绝对值编码器电源不正常 绝对值编码器检测不正常 绝对值编码器电池电压不正常 绝对值编码器数据接受不正常电机转速超过400转/分后编码器打开 驱动器过热伺服驱动器CPU 检测给定信号错误伺服电机(编码器)失控 编码器输出A 、B 、C 相位出错A.C3 编码器A 相B 相断路编码器A 相B 相没接A.00 绝对值数据错 A.02 参数中断 A.04 参数设置错误 A.10 过流A.30 再生电路检查错误 A.31 位置错误脉冲溢出 A.40 主电路电压错误A.71 过载(大负载) A.72 过载(小负载) A.80 绝对值编码器差错 A.81 绝对值编码器失效 A.82 绝对值编码器检测错误 A.83 绝对值编码器电池错误 A.84 绝对值编码器数据不对 A.85 绝对值编码器转速过高A.A1 过热A.B1 给定输入错误 A.C1 伺服过运行 A.C2编码器输出相位错误A.51 过速编码器C 相没接 主电源一相没接 电源被切断通电5秒后,手持与连接仍不对 传输发生5次以上错误 操作状态不正常安川伺服报警代码报警代码报警名称 主要内容 A.00绝对值数据错误不能接受绝对值数据或接受的绝对值数据异常A.02 参数破坏 用户常数的 和数校验”结果异常 A.04 用户常数设定错误 设定的 用户常数”超过设定范围 A.10 电流过大 功率晶体管电流过大 A.30 测出再生异常 再生处理回路异常A.31位置偏差脉冲溢出位置偏差脉冲超出了用户常数 溢出(Cn - 1E)”的值A.40测出主回路电压异常 主回路异常A.C4 编码器C 相断路 A.F1 电源缺相 A.F3 电源失电CPFOO 手持传输错误1 CPF01 手持传输错误2 A.99无错误A.51速度过大电机的回转速度超出检测电平A.71超高负荷大幅度超过额定转矩运转数秒--数十秒A.72超低负荷超过额定转矩连续运转A.80绝对值编码器错误绝对值编码器一转的脉冲数异常A.81绝对值编码器备份错误绝对值编码器的三个电源(+5v,电池组内部电容器)都没电了A.82绝对值编码器和数校验错误绝对值编码器内存的和数校验”结果异常A.83绝对值编码器电池组错误绝对值编码器的电池组电压异常A.84绝对值编码器数据错误收受的绝对值数据异常A.85绝对值编码器超速绝对值编码器通电源时,转速达400r/mi n以上A.A1散热片过热伺服单兀的散热器过热A.b1指令输入阅读错误伺服单元的CPU不能检测指令输入A.C1伺服失控伺服电机(编码器)失控A.C2测出编码器相位差编码器的A,B,C三相输出的相位异常A.C3编码器A相,B相断线编码器的A相,B相断线A.C4编码器C相断线编码器C相断线A.F1电源线缺相主电源有一相没连接A.F3 瞬时停电错误在交流电中,有超过一个电源周期的停电发生CPFOO 数字操作器通讯错误-1 通电5秒后,还不能和伺服单元通讯CPF01 数字操作器通讯错误-2 连续发生5次数据通讯不好A.99 无错误显示显示正常动作状态A.C9 编码器通讯故障(此故障一般都是编码器断线造成的,故障代码只有接好线后才会自动消失)A32 回生过载,回生电能超过回生电阻容量。
伺服驱动器故障代码

伺服驱动器故障代码
伺服驱动器故障代码
Servo驱动器故障代码是用于诊断和解决服务驱动器出现的问题的一种标准。
它可以帮助你在设备无法正常工作时快速定位故障。
下面将详细介绍下Servo驱动器故障代码。
第一类是传动轴类故障,主要原因是反馈传感器缺失或故障。
在这种情况下,会显示以下故障代码:
1、传动轴回路故障:E0015、E0017、E0021
2、传动轴限位故障:E0022、E0024、E0025、E0026
第二类是轴控制方向错误类故障,主要是由于控制器及驱动器设置不正确造成的。
其中,会出现以下故障代码:
1、正反转冲突: E0027、E0028
2、控制轴方向冲突: E0029、E0031
第三类是控制回路故障,主要是由于驱动程序、控制程序及检测设备故障导致的。
这类故障的故障代码如下:
1、停止信号故障:E0032
2、传动故障:E0033
3、控制轴故障:E003
4、E0035
4、输入信号故障:E0036、E0037
最后,我们还需要了解一下机械原因导致的故障,主要是指机械部件和站点设计等原因造成的故障。
这类故障的故障代码如下:
1、机械缓冲系统故障:E0171、E0172
2、装载速度限制:E0173
3、机械冗余装置故障:E017
4、E0175
4、机械操作一致性故障:E0176、E0177
通过以上介绍,大家对Servo驱动器故障代码应该有了比较全面的了解,希望大家在设备出现故障时可以通过查找正确的故障代码来
快速定位故障。
圣杰驱动器报警故障代码大全

圣杰驱动器报警故障代码大全作为一种常见的驱动器设备,圣杰驱动器通常被用于各种机械设备的驱动和控制中。
然而,由于运行环境、驱动器本身的质量等因素的影响,圣杰驱动器也可能会遇到各种故障问题,其中报警故障就是其中的一种。
下面我们将列举圣杰驱动器报警故障代码大全,并配以简要的解释,以供参考:1. E0(电源电压故障):驱动器输入电源电压异常(电压太高或太低)。
2. E1(过流保护):驱动器输出的电流达到或超过最大额定电流时,系统会自动停机保护。
3. E2(过压故障):输出电压超过额定输出电压,并持续超过设定时间,会引起保护故障。
4. E3(马达低速):电机转速信号与实际转速偏差过大。
5. E4(马达过速):电机转速信号与实际转速偏差过大。
6. E5(转矩控制器出错):驱动器内部转矩计算错误或转矩控制器模块出现故障。
7. EP(位置计数器错误):位置计数器出现错误,可能是由于位置计数器损坏或接线错误引起的。
8. EC(编码器失步):编码器损坏或失步引起的故障。
9. E9(通讯故障):驱动器与外部设备的通讯故障,可能是网络设置错误或硬件连接故障引起的。
10. EA(温度保护):驱动器工作温度过高引起的保护故障。
11. EB(EEPROM故障):驱动器内部存储器出现故障,可能导致参数设置丢失。
12. EE(定位控制器出错):驱动器内部的定位控制器模块出现故障引起的故障。
13. EF(软件出错):驱动器内部软件程序出现错误,可能是由于非法操作或系统故障引起的。
14. P1(自校正失败):驱动器自校正过程中发生错误,可能是由于设备损坏或校准参数错误引起的。
以上是一些常见的圣杰驱动器报警故障代码及其解释,当驱动器发生此类故障时,我们需要根据具体情况及时排除故障,排除故障后及时进行系统的检测和测试,避免类似故障再次出现,保障设备的正常运行。
台达驱动器报警代码精选文档
台达驱动器报警代码精
选文档
TTMS system office room 【TTMS16H-TTMS2A-TTMS8Q8-
台达驱动器报警代码
AL001 过电流 AL002 过电压 AL003 低电压
AL004 电机匹配异常驱动器所对应的电机不对 AL005 回生错误
AL006 过负荷电机及驱动器过负荷时动作
AL007 过速度电机控制速度超过正常速度过大时动作
AL008 异常脉冲 AL009 位置控制误差过大 AL011 位置检出器异常
AL012 校正异常 AL013 紧急停止 AL014 反向极限异常 L015 正向极限异常
AL016 IGBT 过热 IGBT 温度过高时动作AL017 参数内存异常
AL018 检出器输出异常 AL019 串行通讯异常 AL020 串行通讯超时
AL022 主环电源缺相 AL023 预先过负载警告
AL024编码器初始磁场错误 AL025 编码器内部错误
AL026编码器内部数据可靠度错误 AL027 电机内部错误
AL028 电机内部错误 AL029 电机内部错误
Off 第九章? 异警排除? AL030 电机碰撞错误
AL031电机 U,V,W 接线错误或断线 AL035 温度超过保护上限
AL048 检出器多次输出异常 AL067 温度警告
AL083驱动器输出电流过大 AL085 回生异常
AL099 DSP 韧体
AL555 系统故障驱动器处理器异常无不切换
AL880 系统故障驱动器处理器异常。
安川伺服驱动器的常用故障代码
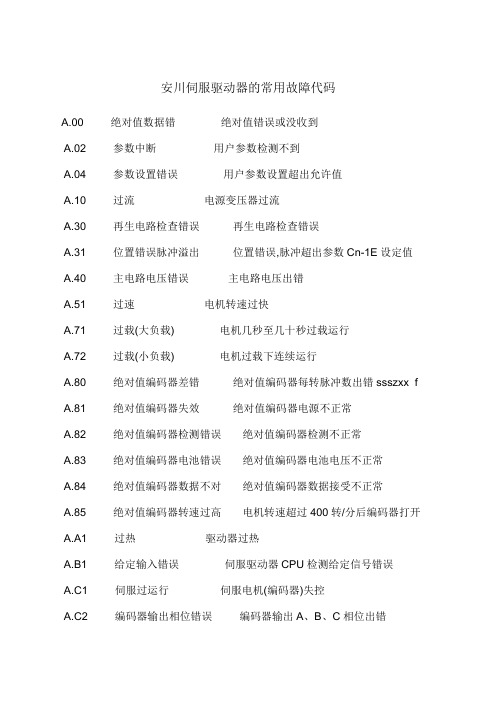
安川伺服驱动器的常用故障代码A.00 绝对值数据错绝对值错误或没收到A.02 参数中断用户参数检测不到A.04 参数设置错误用户参数设置超出允许值A.10 过流电源变压器过流A.30 再生电路检查错误再生电路检查错误A.31 位置错误脉冲溢出位置错误,脉冲超出参数Cn-1E设定值 A.40 主电路电压错误主电路电压出错A.51 过速电机转速过快A.71 过载(大负载) 电机几秒至几十秒过载运行A.72 过载(小负载) 电机过载下连续运行A.80 绝对值编码器差错绝对值编码器每转脉冲数出错ssszxx f A.81 绝对值编码器失效绝对值编码器电源不正常A.82 绝对值编码器检测错误绝对值编码器检测不正常A.83 绝对值编码器电池错误绝对值编码器电池电压不正常A.84 绝对值编码器数据不对绝对值编码器数据接受不正常A.85 绝对值编码器转速过高电机转速超过400转/分后编码器打开 A.A1 过热驱动器过热A.B1 给定输入错误伺服驱动器CPU检测给定信号错误A.C1 伺服过运行伺服电机(编码器)失控A.C2 编码器输出相位错误编码器输出A、B、C相位出错A.C3 编码器A相B相断路编码器A相B相没接A.C4 编码器C相断路编码器C相没接A.F1 电源缺相主电源一相没接A.F3 电源失电电源被切断CPF00 手持传输错误1 通电5秒后,手持与连接仍不对CPF01 手持传输错误2 传输发生5次以上错误A.99 无错误操作状态不正常安川伺服报警代码报警代码报警名称主要内容A.00 绝对值数据错误不能接受绝对值数据或接受的绝对值数据异常A.02 参数破坏用户常数的“和数校验”结果异常A.04 用户常数设定错误设定的“用户常数”超过设定范围A.10 电流过大功率晶体管电流过大A.30 测出再生异常再生处理回路异常A.31 位置偏差脉冲溢出位置偏差脉冲超出了用户常数“溢出(Cn-1E)”的值A.40 测出主回路电压异常主回路异常A.51 速度过大电机的回转速度超出检测电平A.71 超高负荷大幅度超过额定转矩运转数秒-数十秒A.72 超低负荷超过额定转矩连续运转A.80 绝对值编码器错误绝对值编码器一转的脉冲数异常A.81 绝对值编码器备份错误绝对值编码器的三个电源(+5v,电池组内部电容器)都没电了A.82 绝对值编码器和数校验错误绝对值编码器内存的“和数校验”结果异常A.83 绝对值编码器电池组错误绝对值编码器的电池组电压异常A.84 绝对值编码器数据错误收受的绝对值数据异常A.85 绝对值编码器超速绝对值编码器通电源时,转速达400r/min以上A.A1 散热片过热伺服单元的散热器过热A.b1 指令输入阅读错误伺服单元的CPU不能检测指令输入A.C1 伺服失控伺服电机(编码器)失控A.C2 测出编码器相位差编码器的A,B,C三相输出的相位异常A.C3 编码器A相,B相断线编码器的A相,B相断线A.C4 编码器C相断线编码器C相断线A.F1 电源线缺相主电源有一相没连接A.F3 瞬时停电错误在交流电中,有超过一个电源周期的停电发生CPF00 数字操作器通讯错误-1 通电5秒后,还不能和伺服单元通讯CPF01 数字操作器通讯错误-2 连续发生5次数据通讯不好A.99 无错误显示显示正常动作状态A.C9 编码器通讯故障(此故障一般都是编码器断线造成的,故障代码只有接好线后才会自动消失)A32 回生过载,回生电能超过回生电阻容量。
驱动器故障代码

驱动器故障代码驱动器故障是指计算机系统中存储数据的设备出现问题,导致无法正常读取或写入数据。
这种故障可能由多种原因引起,比如硬件故障、软件冲突、人为错误等等。
当计算机系统出现驱动器故障时,会产生一些特定的错误代码,用于判断和诊断问题所在。
本文将详细介绍几种常见的驱动器故障代码,并探讨如何解决这些问题。
一、驱动器故障代码(一):0x0000007B当计算机系统遇到驱动器故障时,可能会出现错误代码0x0000007B。
这个代码通常表示系统无法访问启动驱动器。
出现这个错误代码的原因可能是硬件损坏、驱动器连接错误、系统文件丢失等。
解决这个问题的步骤如下:1.检查硬件连接:首先,确保驱动器的连接是正确的,没有松动或损坏。
可以尝试重新插拔连接线,再次启动计算机,看看问题是否解决。
2.修复系统文件:如果驱动器故障是由系统文件丢失引起的,可以尝试使用系统修复工具修复问题。
在Windows系统中,可以通过在命令行中输入"sfc /scannow"来运行系统文件检查器。
3.更换硬件:如果以上方法都无法解决问题,很可能是硬件损坏导致的驱动器故障。
这时,需要更换驱动器或者联系专业的维修人员进行修复。
二、驱动器故障代码(二):0x000000F4另一个常见的驱动器故障代码是0x000000F4,它通常表示驱动器发生了严重的故障,无法正常工作。
出现这个错误代码的原因可能是硬件损坏、驱动器过热、系统文件损坏等。
以下是解决这个问题的方法:1.降低系统负荷:驱动器过热可能是导致该错误代码的一个常见原因。
可以尝试降低系统负荷,关闭不必要的程序,以减轻驱动器的负担。
2.检查硬件:为了确定驱动器是否损坏,可以尝试将驱动器连接到另一台计算机上,看看是否能够正常读写数据。
如果在其他计算机上也无法正常工作,那么很可能是硬件损坏,需要更换驱动器。
3.修复系统文件:类似于前面提到的方法,使用系统修复工具来修复可能损坏的系统文件也是解决这个问题的一种方法。
伺服驱动器故障代码

伺服驱动器故障代码
E001:过流保护。
可能是由于负载过大、过热、电机故障或电源不稳定等原因引起。
E002:过压保护。
可能是由于电源电压过高或驱动器内部故障引起。
E003:欠压保护。
可能是由于电源电压过低或驱动器内部故障引起。
E004:电源相序保护。
可能是由于三相电源接错或相序不对引起。
E005:编码器信号丢失。
可能是由于编码器损坏、连接不良或电缆故障等原因引起。
E006:位置误差过大。
可能是由于位置环节参数设置不当、负载变化过大或编码器信号不稳定等原因引起。
E007:电机超温保护。
可能是由于连续工作时间过长、散热不良或电机内部故障引起。
E008:跟随误差过大。
可能是由于速度环节参数设置不当、控制指令过大或负载变化过大等原因引起。
E009:伺服报警。
可能是由于控制系统出现异常、电源电压不稳定或驱动器内部故障等原因引起。
驱动器故障代码表
无
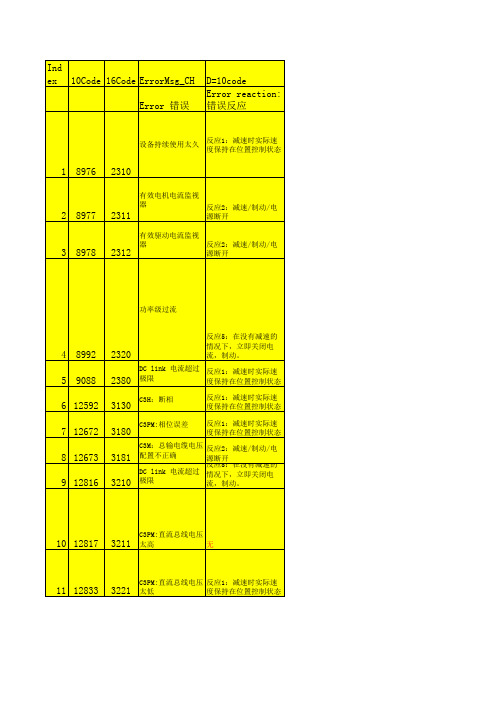
C3PM:直流总线电压 反应1:减速时实际速
11 12833 3221 太低
度保持在位置控制状态
DC link 电流低于 极限
12 12834 13 16912 14 17168 15 17424 16 17536 17 20753 18 20754 19 20757 20 20758 21 20759 22 21376 23 21536 24 21537 25 21541 26 21632 27 21633 28 21649 29 21650 30 21651 31 21664
目标或实际位置超 反应2:减速/制动/电
7323 过上限
源断开
目标或实际位置超 反应2:减速/制动/电
7324 出下限
源断开
7327 运动中变向
反应2:减速/制动/电 源断开
解码器输出电平过 反应2:减速/制动/电
7381 高
源断开
解码器输出电平过 反应2:减速/制动/电
7382 低
源断开
载荷与电机反馈位 反应2:减速/制动/电
Ind ex 10Code 16Code ErrorMsg_CH
Error 错误
D=10code Error reaction: 错误反应
设备持续使用太久
反应1:减速时实际速 度保持在位置控制状态
1 8976 2310
2 8977 3 8978
有效电机电流监视
器
2311
反应2:减速/制动/电 源断开
7385 置差别过大。
源断开
7391 反馈电平超限
反应2:减速/制动/电 源断开
7392 反馈电平过低
反应2:减速/制动/电 源断开
54 29588 55 29589 56 29600 57 29601 58 29605 59 29606 60 29607 61 29608 62 29609 63 29610 64 29611 65 29612 66 29616 67 29824 68 29825 69 29826 70 29827 71 29828 72 29829 73 29830 74 29831 75 29832
rexroth伺服驱动器故障代码

WORD格式C204:(伺服电机编码器接头接触不好)C601:C602:回零故障。
(将S-0-0288显示出来的数值写到S-0-0289上即可解决)E257:直流限制功能发生作用。
说明驱动器超载。
(XX二厂新两鼓成型机径向后压辊电机通电后出现自激吱吱声,一会驱动器便出现报警参数E257,随后又出现F219。
最后查原因是电机三相相序接错了)E410:不能随动或扫描0#地址。
F219:电机过热关断。
F220:负载势能超出伺服驱动器吸收能力。
(XX二厂老厂18V两鼓成型机在进行第十一步侧压辊反包滚压动作时,主鼓在侧压辊反包滚压动作结束、旋转停止时,主轴伺服驱动器报警F220。
而在其它正、反转动作时则没有问题。
将S-0-0100参数由原来的4﹒5改变为10;将S-0-0101参数由7改变为5后将问题解决。
小魏说:如果再不能解决问题,也可用将各个驱动器上顶部的L1和L2两个端子点分别串联在一起的方法加以解决)F228:过分偏差。
(XX二厂新两鼓成型机调试时主机鼓伺服曾经出现过这个报警,查其原因是连接编码器的齿型带过于松弛,信号跳动变化太大所致。
主机机械制动闸脱离不干净或机械旋转系统捌劲,也会出现这个报警。
用加大S-0-0159的值加以解决)F237:设定的位置或速度值超出系统(伺服驱动器)允许的最大值。
(XX黄海橡胶集团公司新厂19V两鼓成型机试车时在后压辊径向伺服驱动器上曾经出现过这个报警信号,表现为后压辊径向运转速度非常的慢。
就象是齿数比给定的不对一样。
但将伺服参数再次拷贝(F5)一遍就好了)(在调试XX载重轮胎厂工业胎成型机时,当从DriveTop看完主机驱动参数将其关闭后,成型鼓正转有且正常,而反转没有,一起动便出现F237报警.经查看是S_393<控制值方式为模数格式>的最后一位由0变为1所致.复原为0便好了)F434:紧急停止.伺服驱动器紧急停止功能起动.F822:伺服电机编码器信号没有或太小。
驱动器故障代码

驱动器故障代码状态显示 闪烁故障信息 处理措施A1 ※ C3口2脚无输入 检查PLC模拟量输出模块到驱动器C3口2脚的接线A2 ※ C3口3脚无输入 检查PLC模拟量输出模块到驱动器C3口3脚的接线A3 ※ C3口2和3脚无输入 检查PLC模拟量输出模块到驱动器C3口2、3脚的接线c ※ 工控机与驱动器通讯中断或者是EPROM故障;检查工控机与PLC的通讯及通讯设置F ※ 电机处于折返状态检查电动缸位置是否已到极限H ※ 电机过温或电机温度反馈线断 检查电机和温度反馈线(电缆旋变反馈与驱动器端的插头),正常时插头端b2与b6之间的电阻为0欧姆;L1 ※ 正转限位开关打开检查电动缸位置是否已到极限L2 ※ 反转限位开关打开检查电动缸位置是否已到极限L3 ※ 正转和反转限位开关打开检查电动缸位置是否已到极限L4 ※ 软件正转限位开关打开检查电动缸软件正转限位是否已打开L5 ※ 软件反转限位开关打开检查电动缸软件反转限位是否已打开r1 ※ 电机旋变反馈线断 检查电机旋变反馈插头:b3与b7之间为28欧姆,b4与b8之间为28欧姆,b5与b9之间为15欧姆;P ※ 电机过电流 检查电动缸电源线是否短路、电动缸是否卡死r0 ※ 外部电机反馈故障检查电动缸位置反馈线u ※ 低电压 检查电源8 ※ 检测指示 电动缸无使能信号,检查操作方式是否在点动或自动位,驱动器C3口7、8脚间是否有24Vt ※ 驱动器过温 驱动器冷却后再使用0 ※ 电源电压过高 降低电源电压,直至符合要求;u ※ 电源电压过低 提升电源电压,直至符合要求;r ※ 电机旋变反馈线断或旋变反馈故障 检查驱动器C2 的25针插头1-2,4-5两对线与电机之间的电阻,正常每一对线之间的电阻为20~30欧姆,否则为断线;j ※ 电机过速 电机速度环设置的限制速度不正确,重新设置;电动缸重新通电;I ※ 驱动器RAM故障更换驱动器8. 同时闪烁 驱动器程序出错清除驱动器原有的程序,重新导入正确的程序;处理措施:驱动器通电,接好驱动器与工控机的通讯线,打开驱动器参数设置界面并通讯,在主界面点击标题栏:先取消使能,“VIEW”的“Ternial”,输入命令“clreeprom”,然后敲回车键,退出通讯界面,断开驱动器电源;打开另外一流好的驱动器电源并通讯,点击主界面标题栏“Edit”中的Backup Variables”,点击右侧FILE中“RECEIVE”,驱动器的所有参数都将出现,点击“SAVE”命令保存参数,注意保存的文件名和保存路径,退出主界面;再次打开有故障的驱动器并通讯,点击主界面标题栏“Edit”中的Backup Variables”,出现参数界面,点击右侧FILE中“OPEN”,打开先前保存的文件,点击右侧“XmiT”,再次保存即可解决问题;。
伺服驱动器报警代码表

伺服驱动器报警代码表硬件型号:伺服MR-JE-A系统版本:伺服驱动器系统伺服驱动器报警代码表:1、AL.E6,伺服紧急停止。
引起此故障的原因一般有两个,一个是控制回路24V电源没有接入,另一个是CN1口EMG和SG之间没有接通。
2、AL.37,参数异常。
内部参数乱,操作人员误设参数或者驱动器受外部干扰导致。
一般参数恢复成出厂值即可解决。
3、AL.16,编码器故障。
内部参数乱或编码器线故障或电机编码器故障。
参数恢复出厂值或者更换线缆或者更换电机编码器,若故障依旧,则驱动器底板损坏。
4、AL.20,编码器故障。
电机编码器故障或线缆断线、接头松动等导致。
更换编码器线或伺服电机编码器。
MR-J3系列发生此故障时,还有一种可能是驱动器CPU接地线烧断导致。
5、AL.30,再生制动异常。
若刚通电就出现报警,则驱动器内部制动回路元件损坏。
若在运行过程中出现,可检查制动回路接线,必要时外配制动电阻。
6、AL.50、AL.51,过载。
检查输出U、V、W三相相序接线是否正确,伺服电机三相线圈烧坏或接地故障。
监控伺服电机负载率是否长时间超过100%,伺服响应参数设置过高,产生共振等原因。
7、AL.E9,主回路断开。
检查主回路电源是否接入,若正常则主模块检测回路故障,须更换驱动器或配件。
8、AL.52,误差过大。
电机编码器故障或驱动器输出模块回路元件损坏,通常油污较多的使用场合此故障较多。
伺服放大器也叫伺服驱动器,是用来控制伺服电机的一种控制器。
其作用类似于变频器作用于普通交流马达。
主要应用于高精度的定位系统。
目前是传动技术的高端产品。
噪声干扰包括二类,一类是从外部进入伺服放大器并可能导制其运行异常,另一类是由伺服放大器辐射出去并可能导致周围设备运行异常。
伺服放大器是由微弱信号控制的电子设备,因此,通常需要以下的防护措施。
此外,由于伺服放大器是通过高速开关输出电流的,所以会形成噪声源。
当噪声引起周围设备运行异常时,就应采取抗干扰措施。
电机驱动器故障代码及排查方法
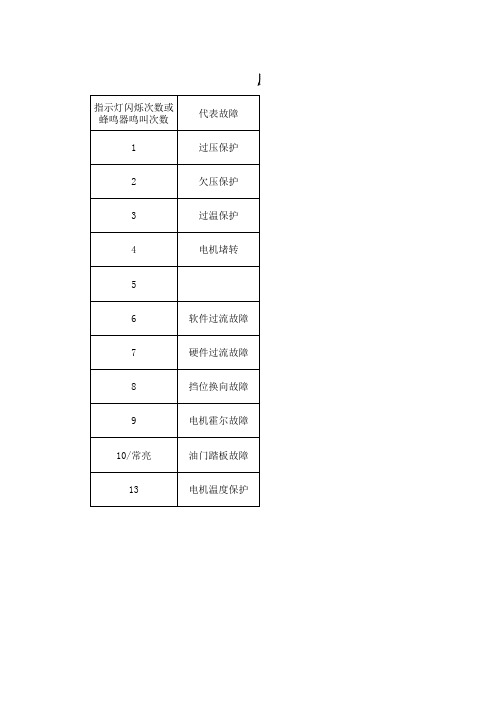
控制器超负荷工作造成过流故障,请减轻车辆负载。 控制器严重超负荷工作造成过流故障,请减轻车辆负载。 车辆在未停止状态下切换换向挡位造成,请杜绝不良操作习惯 电机霍尔传感器损坏或者连接线及接插件接触不良 油门踏板损坏或者连接线及接插件接触不良 表示电机温度偏高,请冷却后再启动并减小负载
、72V电瓶—>电压大于90V)
电压低于52V)
威日电机驱动器故障代码及排查方法
指示灯闪烁次数或 蜂鸣器鸣叫次数 1 2 3 4 5 6 7 8 9 10/常亮 13 软件过流故障 硬件过流故障 挡位换向故障 电机霍尔故障 油门踏板故障 电机温度保护 代表故障 过压保护 欠压保护 过温保护 电机堵转
威日电机驱动器故障代码及排查方法
故障排查ቤተ መጻሕፍቲ ባይዱ
检查电瓶规格是否正确或者增程器是否超压输出;(60V电瓶—>电压不能大于80V、72V电瓶—>电压大于 检查电瓶是否缺电或者连接线松动;(60V电瓶—>电压不能低于42V、72V电瓶—>电压低于52V) 控制器超负荷工作造成温度超过100℃,请断电关机等待温度降低。 超负载工作或者电机相线接错
驱动器故障代码

驱动器故障代码驱动器故障代码详解驱动器是计算机硬件中的重要组成部分,它负责控制和管理数据的读取和写入。
在长期使用过程中,由于各种原因,驱动器可能会出现故障,导致数据读写的失败或无法访问。
下面将介绍一些常见的驱动器故障代码及其解决方法。
1. BSOD(蓝屏死机)BSOD是指计算机出现系统严重错误而无法继续运行,屏幕变成蓝色,并显示一些错误代码。
在某些情况下,BSOD可能是由于驱动器故障引起的。
解决方法一般是重新安装或更新相关的驱动程序。
2. 无法识别的设备有时在设备管理器中会显示一个驱动器设备为未知或无法识别的设备。
这可能是由于驱动器文件损坏或缺失引起的。
解决方法是从计算机制造商或驱动程序官方网站下载并安装正确的驱动程序。
3. I/O 设备错误当你尝试访问驱动器时,可能会收到一个 I/O 设备错误的错误提示。
这通常是由于硬件故障或错误配置引起的。
首先,你可以尝试重新启动计算机来解决此问题。
如果问题仍然存在,那么你可能需要检查驱动器的物理连接是否稳定,或者更换连接线缆。
4. 驱动器无响应有时驱动器可能会无法响应,导致无法访问或读取数据。
这可能是由于驱动器固件故障或由于逻辑错误引起的。
解决方法是使用磁盘工具来检查和修复驱动器上的错误,或者使用专业数据恢复软件来尝试恢复丢失的数据。
5. SMART 错误S.M.A.R.T(自动监测、分析和报告技术)是一种技术,可以检测和报告驱动器的潜在故障。
当你的计算机启动时,可能会出现一个SMART错误的提示。
这表明驱动器可能存在问题并且可能需要更换。
建议你备份驱动器上的数据并更换新的驱动器。
6. 驱动器噪音当驱动器发出异常噪音时,可能是由于驱动器损坏或部件松动引起的。
这时你应该尽快备份驱动器上的数据,并联系相关的技术支持人员或专业维修人员进行检查和修复。
7. 驱动器温度过高如果你觉察到驱动器温度异常高,那么可能是由于不良散热或驱动器内部故障引起的。
解决方法包括确保驱动器良好的散热,清除驱动器周围的灰尘和杂物,或者更换故障的散热系统。
驱动器故障代码

重启动 b maXX 4400
33
报文故障
无反应
重启动 b maXX 4400
34
错误的模块类型
无反应
与鲍米勒联系
35
在列表和电报中的
数据过多
无反应
与鲍米勒联系
36
在列表和电报中的
数据太少
无反应
与鲍米勒联系
37
无效的操作数
无反应
与鲍米勒联系
38
LC仅支持VARSTST_
MEMORY
无反应
测试RAM
IS
参见85页“编码器1(Hiperface)P0234
113
无效模块代码
IS
使用另一个编码器
114
保留
IS
115
编码器1线路断裂
IS
排除编码器1的线路断裂
116
编码器1过速
IS
查看编码器的允许速度
117
超过允许限值
IS
使用另一个编码器
118
不知编码器类型
IS
检查是否连接了合适的编码器或使用另一个编码器
48
功能模块A故障
级别3故障
参阅“Function module A to E
P0240 to P0244”118页(=)
49
功能模块B故障
级别3故障
参阅“Function module A to E
P0240 to P0244”118页(=)
50
功能模块C故障
级别3故障
参阅“Function module A to E
39
无效的运算体地址
无反应
输入有效地值
40
数值小于最小值
TDE驱动器报警故障代码

读写EEPROM时出错
报警A1、1与A1、2皆出现
EEPROM有问题
A2、0
绝对传感器通道与电机相序感应相反
编码器绝对值通道与电机没有相同的感应顺序。在参数P79中表现出绝对初始位置与结束位置的脉冲差异。
交换绝对值通道然后重新再做连接测试。
A2、1
绝对传感器通道有问题
编码器绝对值通道存在某些问题。
如果电阻不就是太热,检查电阻与其连接以确保回路正常。
A11、2
软件检测
中间驱动器回路电压(DC母线参见d24)超过最大值(P107)
A11、3
硬件检测+软件检测
硬件与软件检测A11、0与A11、1情况出现
A12、0
软件报警
C29不等于1
检查并给“驱动软件使能”连接参数C29使能
A12、1
无电源软启动运行
检查三相输入电压。
试着关断再重新启动,测量DC母线电压(用监视器或测试笔)。
如果问题仍存在,请与TDE联系,应该就是软启动回路故障。
A13、1
安全力矩关断
S1与S3连接端子的+24V缺失。因此启用鉴别停止功能。
将+24V加在端子S1与S3上。
如果用户想使用安全力矩关断功能而不出现报警则设置C73=1。
正向错误
反置正向速度转向设定C76=1
速度给定值反向
反置速度给定值
电机转动不可调节
无给定值信号
检查接线,如果没有信号则需给出给定值信号。
过载
减小电机负载
电机加速与制动不正常
加速/启动-减速/制动时间过短
检查参数必要时修改。
负载过高
降低负载
电机转数太高或太低
驱动器故障代码

处理器(系统)错误(处理器模块错误)P0201
故障代码
内容
控制器反应
故障处理
0
保留
1
看门狗错误
IS
重启动b maXX 4400
2
错误中断
IS
重启动b maXX 4400
3
NMI-中断/总线错误
IS
重启动b maXX 4400
4至15
保留空闲=0
操作(系统)错误(操作系统模块错误)P0202
IS
查看编码器的允许速度
117
超过允许限值
IS
使用另一个编码器
118
不知编码器类型
IS
检查是否连接了合适的编码器或使用另一个编码器
119
数据字段对电机数据无效
IS
使用另一个编码器
120
电机数据无效果
IS
使用另一个编码器
121
存储电机数据错误
IS
使用另一个编码器
122
电机数据写保护,不允许写(对BM电机无效)
参阅“Function module A to E
P0240 to P0244”118页(=3.level)
51
功能模块D故障
级别3故障
参阅“Function module A to E
P0240 to P0244”118页(=3.level)
52
功能模块E故障
级别3故障
参阅“Function module A to E
81
超过了散热片温度门限
IS
将控制器降温或者减轻
负载
82
中间回路过电压
IS
减小直流回路电压
83
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
查看编码器的允许速度
117
超过允许限值
IS
使用另一个编码器
118
不知编码器类型
IS
检查是否连接了合适的编码器或使用另一个编码器
119
数据字段对电机数据无效
IS
使用另一个编码器
120
电机数据无效果
IS
使用另一个编码器
121
存储电机数据错误
IS
使用另一个编码器
122
电机数据写保护,不允许写(对BM电机无效)
87
安全继电器off(或故障)
IS
检查安全继电器,更换新的。
88
安全继电器off(安全继电
器O.K)或功率单元故障
(无内部电压)
IS
检查安全继电器和它的连接,如果未发现问题,更换功率单元。
89
功率单元未就绪
IS
完成功率单元就绪的相关操作
90到95
保留 Idle=0
电机故障(电机模块故障)P0207
故障代码
内容
控制器反应
故障处理
96
短路温度传感器
(Tm<=-30 degrees_C)
无反应
排除温度传感器的短路点
97
电机温度传感器未连接
(Tm>+300 degrees_C)
无反应
排除温度传感器电路的开
路点
98
温度过高
IS
将电机冷却后再使用/或减轻负载
99
I2t-过载
IS
保持驱动器在禁止状态,直到
I2t的实际值减至100%以下
39
无效的运算体地址
无反应
输入有效地值
40
数值小于最小值
无反应
检查数据纪录并调整
41
数值大于最大值
无反应
检查数据纪录并调整
42
参数被写保护
无反应
检查数据纪录并调整
43
在运行状态下参数
无法被修改
无反应
44
参数值是无效的
无反应
45到47
空闲=0
模块故障(扩展模块故障)P0204
故障代码
内容
控制器反应
故障处理
驱动器故障代码
处理器 (系统)错误(处理器模块错误)P0201
故障代码
内容
控制器反应
故障处理
0
保留
1
看门狗错误
IS
重启动b maXX 4400
2
错误中断
IS
重启动b maXX 4400
3
NMI-中断/总线错误
IS
重启动b maXX 4400
4至15
保留空闲=0
操作(系统)错误(操作系统模块错误)P0202
100到111
Idle=0
Enc1 故障(编码器模块1故障)P0208
故障代码
描述
反应
错误恢复
112
通讯错误(Hiperface-说明)
IS
参见85页“编码器1(Hiperface)P0234
113
无效模块代码
IS
使用另一个编码器
114
保留
IS
115
编码器1线路断裂
IS
排除编码器1的线路断裂
116
编码器1过速
参阅“Function module A to E
P0245 to P0250”118页(=3.level)
58
功能模块M故障
级别3故障
参阅“Function module A to E
P0245 to P0250”118页(=3.level)
59
系统加速度超时
可调
重启
60到63
Idle=0
PSU_故障(电源模块故障)P0205
无反应
重启动 b maXX 4400
33
报文故障
无反应
重启动 b maXX 4400
34
错误的模块类型
无反应
与鲍米勒联系
35
在列表和电报中的
数据过多
无反应
与鲍米勒联系
36
在列表和电报中的
数据太少
无反应
与鲍米勒联系
37
无效的操作数无Leabharlann 应与鲍米勒联系38
LC仅支持VARSTST_
MEMORY
无反应
测试RAM
故障代码
内容
控制器反应
故障处理
16
系统登陆故障
IS
重启动 b maXX 4400
17
软件故障(among
others switch)
1S
重启动 b maXX 4400
18
操作系统时间片配置过程中的故障
1S
重启动 b maXX 4400
19
时间片-时间超时
1S
重启动 b maXX 4400;改变操作系统时间片配置
P0240 to P0244”118页(=3.level)
53
功能模块G故障
级别3故障
参阅“Function module A to E
P0245 to P0250”118页(=3.level)
54
功能模块H故障
级别3故障
参阅“Function module A to E
P0245 to P0250”118页(=3.level)
55
功能模块J故障
级别3故障
参阅“Function module A to E
P0245 to P0250”118页(=3.level)
56
功能模块K故障
级别3故障
参阅“Function module A to E
P0245 to P0250”118页(=3.level)
57
功能模块L故障
级别3故障
故障代码
内容
控制器反应
故障处理
64
主电源故障(电网故障)
可通过P297调整
重新连接供电电源
65到79
保留 Idle=0
AmpError(功率模块故障)P0206
故障代码
内容
控制器反应
故障处理
80
根据Hiperface 说明的通讯故障
IS
参阅84页“功率单元
(Hiperface)P0233”
(=3.Level)
20
无存储空间
1S
重启动 b maXX 4400
21
软件故障:无效故
障代码
1S
重启动 b maXX 4400
22
软件故障:无效报
警代码
1S
重启动 b maXX 4400
23到31
空闲=0
Proprog(系统错误)(proprog-通讯驱动器模块故障)P0203
故障代码
内容
控制器反应
故障处理
32
Proprog-报文超时
参阅“Function module A to E
P0240 to P0244”118页(=3.level)
51
功能模块D故障
级别3故障
参阅“Function module A to E
P0240 to P0244”118页(=3.level)
52
功能模块E故障
级别3故障
参阅“Function module A to E
81
超过了散热片温度门限
IS
将控制器降温或者减轻
负载
82
中间回路过电压
IS
减小直流回路电压
83
过电流
IS
减轻负载
84
接地电流故障
IS
检查控制器的安装(自
b maXX443X系列)并检查
电机的接地
85
超过内部空气温度门限
IS
确认控制器有足够的冷却
86
Ixt>限定值
IS
保持控制器在禁止状态,直到电流实际值减至100%以下
48
功能模块A故障
级别3故障
参阅“Function module A to E
P0240 to P0244”118页(=3.level)
49
功能模块B故障
级别3故障
参阅“Function module A to E
P0240 to P0244”118页(=3.level)
50
功能模块C故障
级别3故障