微动开关说明
Honeywell 微动开关 说明书

微动开关Honeywell目录号说明电气数据和UL代码O.F.Noz最小R.F.Noz最大RT.mmin最小O.T.mminD.T.mmin最大O.P.*mmin 3MN1 用于大多数应用场合15 AV3,34-5,5612.201,6761,52.0602,03.0800,38-0,63.015-.0252,16.085 3MN6 力较小场合 15AV1,95-3,17-111,1141,52.0602,03.0800,38-0,63.015-.0252,16.085Honeywell/Commercial Switch-Sensor 霍尼韦尔开关与传感器1上海: Tel:021-******** 北京: Tel:010-******** 深圳: Tel:0755-******* 广州: Tel:020-******** e-mail:jian.bo.zhou@/ /sensing双断3MN系列特点.080英寸的最小超行程有高达15 A的功率负荷开关容量有240 vac时1马力的电动机处理能力机械寿命长达10,000,000次循环-95%完好率用抗弧塑料端子与端子间间距更大,能有效地降低短路的可能性用8号接线螺钉UL,CSA认证一般信息3MN开关可与限位或控制机构一起用在机床、压力机或其它工业设备上。
这些开关在安装时容易连接。
双断开关端子的接线必须在同一电压源和同一极上。
其负荷应在线路的同侧。
电气额定值电路电气数据和UL标准双电路双断V 电动机控制15A,120,240,480或600 vac;1/2HP,120 vac; 1hp,240 vac;0.8A,115 vdc;0.4A,230 vdc。
特性:O.F.-动作力; R.F.-释放力; P.T.-预行程;订货指南O.T.-超行程; D.T.-差动行程; O.P.-操作位置外形图,图1*±0.38 mm±.015 in安装尺寸(仅供参考)0,0=mm图例:0.00=in直径的安装孔(2)图1。
MS2型微动开关系列 说明书

GOLDEN-SWITCH38◆ 接线端子尺寸 Terminal dimensions◆ 安装孔尺寸 Mounting hole dimensions◆ 外型尺寸和动作特性 Dimensions and operating characteristicsMS2-Z0F100MS2-Z0F150MS2-Z0F200MS2-Z0F300MS2-Z3F100MS2-Z3F150MS2-Z3F200MS2-Z3F300MS2-Z1F100MS2-Z1F150MS2-Z1F200MS2-Z1F300MS2-Z2F100MS2-Z2F150MS2-Z2F200MS2-Z2F300MS2-Z6F100MS2-Z6F150MS2-Z6F200MS2-Z6F300MS2-Z5F100MS2-Z5F150MS2-Z5F200MS2-Z5F300MS2-Z4F100MS2-Z4F150MS2-Z4F200MS2-Z4F30035MICRO SWITCHMS2型微动开关系列 Micro switch series◆ 特点和用途 Characteristics and usage.■ 安全可靠的小型开关 Safe reliable miniature switch.■ 结构紧凑。
具有微小触点间隙、快速动作、高灵敏和微小动作行程的特点。
Nice appearance, tight configuration,characteristic,small contact gap,quick action,high sensitivity and small operating travel.■ 长寿命,高可靠 Long life,high reliability.■ 接线端子种类齐全 Variety of contact terminals. ■ 配备各种形式动臂 Variety of levers.■ 适用于电话、空调、电脑、增湿器、报警器、计时器、焊枪、传真机、游戏控制杆、榨汁机、搅伴机、玩具车、灯具、电热水壶等。
Honeywell 微动开关 说明书

电路系统 电气数据和UL 代码除订货 指南中 另有说 明外均 为单刀双掷K 用非极化开关建立的额定值 10A,125 vac 或vdc 1/4马力,125 vac 或vdc UL 代码L 168 非极化:10A 电阻或1/4马力125 vdc 3A 最大电阻250 vdc 极化:10A 电阻或1/2马力125 vdc 3A 最大电阻,250 vdc*为进行极化将线路的负极侧连至共用端子为获得同样的效果用黄铜螺钉安装开关并在开关和安装表面间使用一非磁性塞(至少1/4”厚)特 点• 耐电弧开关壳• 机械寿命:100,000次动作后95%完好• 温度极限为+180°F(82°C) • 与Z 开关可互换安装 • UL 认可可供的端子钎焊(无目录号标志)总体介绍MT(单刀双掷)磁性灭弧开关设计成用于高开断容量(125和250VDC)的系统在触头间隙周围的整体磁铁使电弧偏移从而保护了触头盖和壳体间的通风口能让热气体逃逸这些开关设计成用于控制直流电动机电磁线圈等 A286-32NC ×.218”螺钉 可连接粗达12号线电气额定值特 性:O.F.-动作力; R.F.-释放力; P.T.-预行程 O.T.-超行程; D.T.-差动行程;O.P.-操作位置订货指南目录号建议用于电气数据和UL 代码O.F. N oz R.F .最小N oz R.T.最大 mm in O.T .最小 mm in D.T .最大 mm in O.R. mm in MT-4R-A28销钉式柱塞 单刀双掷10A K3,34-5,0 12-181,39 51,02 .040,13 .0050,1-0,18 .004-.00715,9±0,38 .625±.015外形图图1订货指南名称电气数据和UL代码O.F.最大NozR.F.最小NozR.T.最大mminO.T.最小mminD.T.最大mminO.R*mmin MT-4RV-A28 直杠杆 10AK0,5620,140.512,70.51,19.0472,16.08519,1.750外形图图2MT-4RV2-A28 1,90in(48,3mm)杠杆带有淬火钢滚轮10AK0,762.750,070.258,890.350,79.0311,65.06530,21.188MT-4RV22-A28 1,03in(26,2mm)杠杆带有淬火钢滚轮10AK1,254.50,2815,08.2000,38.0150,89.03531,31.234外形图图3MT-4RL-A28 1,95in(49,5mm)柔性刀形叶片10AK3,34120,281- 1,52.060最大19,1.750外形图图4MT-4RL2-A28 1,82in(46,2mm)柔性刀形叶片带淬火钢滚轮10AK3,34120,281- 1,52.060最大30,21.188外形图图5另有说明除外±0,76mm±.030in安装尺寸(仅供参考)销钉式柱塞直杠杆直径图1图2滚轮杠杆柔性刀形叶片直径宽滚轮图3 图4柔性滚轮刀形叶片直径宽滚轮图5安装孔接受.139”(3,53mm)直径的销钉或螺钉0,0=mm图例:0,00=in。
微动开关-欧姆龙学堂-技术指南

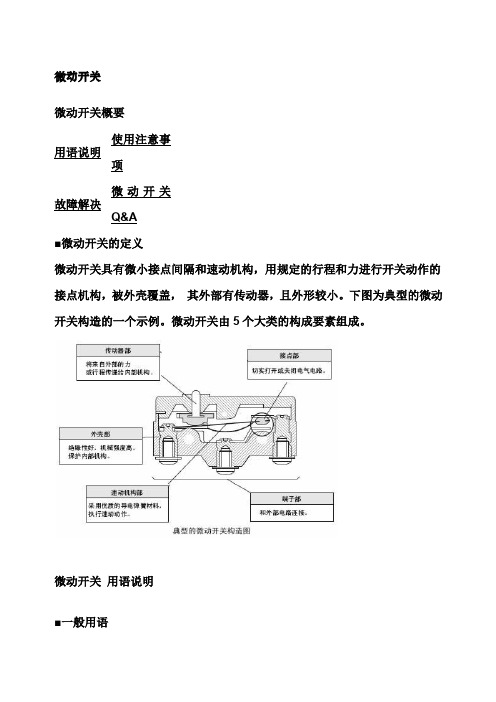
微动开关的定义微动开关具有微小接点间隔和速动机构,用规定的行程和力进行开关动作的接点机构,被外壳覆盖,其外部有传动器,且外形较小。
下图为典型的微动开关构造的一个示例。
微动开关由5个大类的构成要素组成。
微动开关用语说明■一般用语(1)一般用语微动开关:具有微小接点间隔和快动机构,用规定的行程和规定的力进行开关动作的接点结构,用外壳覆盖,其外部有驱动杆的一种开关。
(以下称开关)有接点:在开关类型中,和具有开关特性的半导体开关相比,通过接点的机械开关来实现开关的功能。
接触形式:根据各种用途构成接点的电气输入输出电路[(16)中显示]。
额定值:一般指作为开关特性和性能的保证基准的值,例如额定电流、额定电压等,其前提是特定的条件(负载的种类、电流、电压、频率等)。
树脂固定(塑封端子):在端子部位用导线配线后,通过填充树脂来固定该部分,消除露出的带电部位来提高防滴性的方法。
绝缘电阻:指非连接端子间、各端子和不带电金属部位间、各端子和地间的电阻值。
耐压:在规定的测定部位加1分钟高电压后,不会引起绝缘损坏的临界值。
接触电阻:表示接点的接触部位的电阻,但一般表示包含弹簧和端子部位导体电阻的电阻值。
抗振性:误动作振动微动开关在使用时,由于振动闭合的接点在超过规定的时间内不分离的振动范围。
抗冲击性:耐久冲击指微动开关在运输中或者安装时不会受到由该机械冲击带来的各部位的损伤,并满足动作特性的范围内的冲击。
误动作冲击?指微动开关使用时由于冲击闭合的接点在超过规定的时间内不分离的冲击范围。
(2)关于结构、构造的用语●微动开关的结构、构造(3)有关寿命的用语机械寿命:指接点不通电,以规定的操作频率将过行程(OT)设定为规格值使其运行时的开关寿命。
电气寿命:在接点上连接额定负载,以规定的操作频率将过行程(OT)设定为规格值进行开关时的开关寿命。
(4)标准试验状态开关的试验条件如下。
环境温度:20±2℃、相对湿度:65±5%RH、气压:101.3kPa(5)N水平参考值表示可靠度为60%(λ60)下的故障水平。
6KV真空断路器微动开关、线圈电阻部分说明

6KV真空断路器微动开关部分说明
1.(合闸30±1.5Ω分闸19.5±1.5Ω,合闸线圈测量方法:开关处于分闸位置,辅助开
关下层第一个端子与储能组合微动开关自左向右第一个微动开关端子间;分闸线圈测量方法:辅助开关上层第一个与第二个段之间),同原始值及上次值比较无明显变化。
分、合闸线圈用1000V摇表测得绝缘电阻不低于1MΩ。
2.开关动触头超行程和动触头电磨损检查
将开关位于合闸位置,用专用工具超行程测试棒检查每相触头超行程合格情况,(超行程测试棒不能插入绝缘拉杆与动触头传动连接轴销间隙时,标示动触头超行程合格,同时,用肉眼观察每相动触头外部导电杆上红线状态,如果看见红线,则动触头电磨损合格,看不见,则动触头电磨损已经不合格,建议更换整体真空灭弧室。
3.储能组合微动开关自左向右共3个开关分别为LS1(窜入开关合闸线圈回路),LS2(窜
入储能电机回路),LS3(窜入储能指示灯回路)。
4.开关辅助开关共分为上下两层,上层为开关的常开接点,下层为开关的常闭接点,上层
和下层第一至第三个端子两组串联使用组合为开关内部分合闸回路辅助接点用,后面五组接点为开关的对外输出无源节点,共外部回路使用。
(五常开、五常闭)
5.定位销接点串入合闸线圈回路,定位销提起,接点断开,定位销落下,接点闭合。
接通
合闸回路。
6.后门微动接点出入接地闸刀闭锁回路,门正常关好,接点接通,在于带电显示器常闭接
点串联(只要一相有电时,该接点断开,三相无电时,该接点闭合,)手动按下微动开关后,电磁锁线圈带电,电磁铁顶杆吸下去,打开小门,进行操作接地闸刀。
合闸电流3.7A,分闸电流5.7A。
熔断器微动开关参数表

熔断器微动开关参数表全文共四篇示例,供读者参考第一篇示例:熔断器微动开关是一种常用的电气元件,广泛应用于各种电子产品和电力系统中。
它的作用是在电路发生短路或过载时,能够迅速切断电流,从而保护电路和设备不受损坏。
为了更好地了解和选择熔断器微动开关,我们需要了解一些关键参数和性能指标。
下面就是关于熔断器微动开关参数表的介绍:1. 额定电流(Rated current):熔断器微动开关能够正常工作的最大电流值,通常用安培(A)表示。
根据具体的电路需求和负载情况,选择合适的额定电流是保证熔断器微动开关正常工作的关键。
2. 触点动作形式(Contact action form):熔断器微动开关的触点动作形式通常分为单刀单掷(SPST)、单刀双掷(SPDT)、双刀双掷(DPDT)等多种形式,根据实际需求选择合适的动作形式。
3. 接触电阻(Contact resistance):熔断器微动开关的接触电阻是指在闭合状态时两个触点之间的电阻值,影响电路的传导性能和稳定性。
一般来说,接触电阻越小,性能越好。
4. 绝缘电阻(Insulation resistance):熔断器微动开关的绝缘电阻是指在通电状态下,开关外壳和触点之间的绝缘性能,通常用欧姆(Ω)表示。
高绝缘电阻可以有效保护电路不受外界环境影响。
5. 动作寿命(Life cycle):熔断器微动开关的动作寿命是指在规定条件下,开关能够正常工作和切换的次数。
一般来说,动作寿命越长,开关的可靠性和耐用性就越好。
6. 工作温度范围(Operating temperature range):熔断器微动开关的工作温度范围是指能够正常工作的环境温度范围,通常以摄氏度(℃)表示。
选择合适的工作温度范围是确保熔断器微动开关稳定性和可靠性的重要因素。
7. 安全认证(Safety certification):熔断器微动开关通常需要通过各种国际和行业标准的安全认证,如CE认证、UL认证等。
微动开关说明

微动开关微动开关概要■微动开关的定义微动开关具有微小接点间隔和速动机构,用规定的行程和力进行开关动作的接点机构,被外壳覆盖,其外部有传动器,且外形较小。
下图为典型的微动开关构造的一个示例。
微动开关由5个大类的构成要素组成。
微动开关用语说明■一般用语(1)一般用语微动开关:具有微小接点间隔和快动机构,用规定的行程和规定的力进行开关动作的接点结构,用外壳覆盖,其外部有驱动杆的一种开关。
(以下称开关)有接点:在开关类型中,和具有开关特性的半导体开关相比,通过接点的机械开关来实现开关的功能。
接触形式:根据各种用途构成接点的电气输入输出电路[(16)中显示]。
额定值:一般指作为开关特性和性能的保证基准的值,例如额定电流、额定电压等,其前提是特定的条件(负载的种类、电流、电压、频率等)。
树脂固定(塑封端子):在端子部位用导线配线后,通过填充树脂来固定该部分,消除露出的带电部位来提高防滴性的方法。
绝缘电阻:指非连接端子间、各端子和不带电金属部位间、各端子和地间的电阻值。
耐压:在规定的测定部位加1分钟高电压后,不会引起绝缘损坏的临界值。
接触电阻:表示接点的接触部位的电阻,但一般表示包含弹簧和端子部位导体电阻的电阻值。
抗振性:误动作振动微动开关在使用时,由于振动闭合的接点在超过规定的时间内不分离的振动范围。
抗冲击性:耐久冲击指微动开关在运输中或者安装时不会受到由该机械冲击带来的各部位的损伤,并满足动作特性的范围内的冲击。
误动作冲击?指微动开关使用时由于冲击闭合的接点在超过规定的时间内不分离的冲击范围。
(2)关于结构、构造的用语●微动开关的结构、构造(3)有关寿命的用语机械寿命:指接点不通电,以规定的操作频率将过行程(OT)设定为规格值使其运行时的开关寿命。
电气寿命:在接点上连接额定负载,以规定的操作频率将过行程(OT)设定为规格值进行开关时的开关寿命。
(4)标准试验状态开关的试验条件如下。
环境温度:20±2℃、相对湿度:65±5%RH、气压:(5)N水平参考值表示可靠度为60%(λ60)下的故障水平。
微动开关说明精编版
微动开关说明GE GROUP system office room 【GEIHUA16H-GEIHUA GEIHUA8Q8-微动开关微动开关概要用语说明使用注意事项故障解决微动开关Q&A■微动开关的定义微动开关具有微小接点间隔和速动机构,用规定的行程和力进行开关动作的接点机构,被外壳器,且外形较小。
下图为典型的微动开关构造的一个示例。
微动开关由5个大类的构成要素组微动开关用语说明(1)一般用语微动开关:具有微小接点间隔和快动机构,用规定的行程和规定的力进行开关动作的接点结外部有驱动杆的一种开关。
(以下称开关)有接点:在开关类型中,和具有开关特性的半导的机械开关来实现开关的功能。
接触形式:根据各种用途构成接点的电气输入输出电路[(16)额定值:一般指作为开关特性和性能的保证基准的值,例如额定电流、额定电压等,其前提是类、电流、电压、频率等)。
树脂固定(塑封端子):在端子部位用导线配线后,通过填充树脂来固定该部分,消除露出性的方法。
绝缘电阻:指非连接端子间、各端子和不带电金属部位间、各端子和地间的电阻值。
耐压:在规定的测定部位加1分钟高电压后,不会引起绝缘损坏的临界值。
接触电阻:表示接点的接触部位的电阻,但一般表示包含弹簧和端子部位导体电阻的电阻值。
抗振性:误动作振动微动开关在使用时,由于振动闭合的接点在超过规定的时间内不分离的抗冲击性:耐久冲击指微动开关在运输中或者安装时不会受到由该机械冲击带来的各部位的损的范围内的冲击。
误动作冲击指微动开关使用时由于冲击闭合的接点在超过规定的时间内不分离的冲击范围。
(2)关于结构、构造的用语●微动开关的结构、构造(3)有关寿命的用语机械寿命:指接点不通电,以规定的操作频率将过行程(OT)设定为规格值使其运行时的开关电气寿命:在接点上连接额定负载,以规定的操作频率将过行程(OT)设定为规格值进行开(4)标准试验状态开关的试验条件如下。
环境温度:20±2℃、相对湿度:65±5%RH、气压:101.3kPa(5)N水平参考值表示可靠度为60%(λ60)下的故障水平。
微动开关限位结构-概述说明以及解释

微动开关限位结构-概述说明以及解释1.引言1.1 概述微动开关是一种常见的电子元件,它具有小巧灵活、可靠性高、使用寿命长等特点。
它通常用于控制电路的开关动作,并且常用于限位控制、触发检测等方面。
微动开关限位结构是微动开关的一种重要设计形式,其作用是在特定位置上实现开关的触发或切换。
微动开关限位结构通常包括一个活动臂、一个触发物和一个触发点。
活动臂是微动开关中的关键部件,它能够在外力的作用下做出弯曲或折断动作,将触发物推动到特定的位置。
触发物可以是一根杆、一个按钮或其他形式,它与活动臂相连,当活动臂发生动作时,触发物会随之移动。
触发点是微动开关中的电触点,当触发物到达特定位置时,触发点会闭合或断开,从而实现电路的开关动作。
微动开关限位结构的设计原理主要基于几何学和力学原理。
通过合理的设计和调整活动臂的长度、形状和材料,可以实现特定的启动力、行程以及稳定的动作特性。
同时,触发物的设计也很关键,它需要具备足够的刚性和灵敏度,以保证微动开关在受到外力作用时能够准确触发。
此外,在选择触发点时,要考虑其接触性能和导电性能,以确保可靠的电路开关。
微动开关限位结构具有许多优势。
首先,它的设计紧凑,适合于空间有限的应用场合。
其次,微动开关具有较高的可靠性和稳定性,能够承受较大的压力和外力。
此外,微动开关限位结构的使用寿命长,一般可达到几十万次的动作次数。
微动开关限位结构在工业自动化、航空航天、电子设备等领域有着广泛的应用前景。
随着科技的不断发展,对微动开关性能的要求也越来越高,未来的发展方向将集中在提高微动开关的精度、灵敏度和可靠性,以满足日益复杂的工程需求。
同时,随着智能化的推进,微动开关限位结构也将与其他传感器、控制器相结合,实现更加智能化和自动化的控制系统。
1.2 文章结构文章结构部分的内容:文章结构是指整篇文章的组织架构和展示方式,它对于读者理解和掌握文章内容非常重要。
本文分为引言、正文和结论三个部分。
引言部分主要包括概述、文章结构和目的三个小节。
Honeywell SE SX 系列 环境密封微动开关 说明书
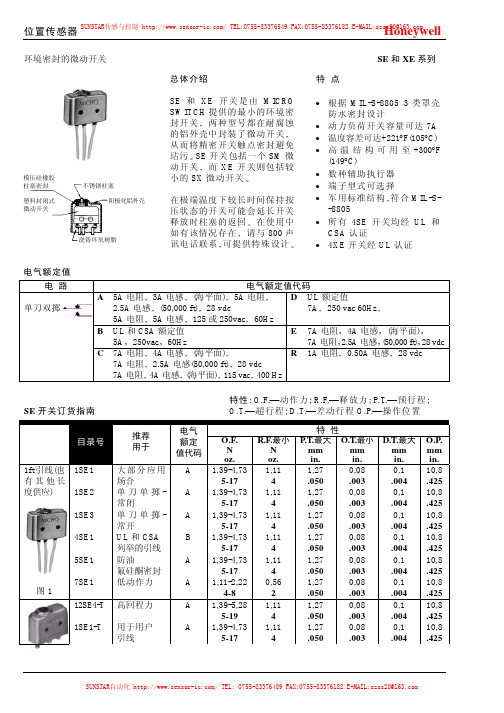
环境密封的微动开关SE 和XE 系列模压硅橡胶 柱塞密封 不锈钢柱塞塑料封闭式 阳极化铝外壳微动开关浇铸环氧树脂总体介绍SE 和XE 开关是由MICRO SWITCH 提供的最小的环境密封开关两种型号都在耐腐蚀的铝外壳中封装了微动开关从而将精密开关触点密封避免玷污SE 开关包括一个SM 微动开关而XE 开关则包括较小的SX 微动开关在极端温度下较长时间保持按压状态的开关可能会延长开关释放时柱塞的返回在使用中如有该情况存在请与800声讯电话联系可提供特殊设计特 点• 根据MIL-S-8805 3类罩壳防水密封设计• 动力负荷开关容量可达7A • 温度容差可达+221°F(105°C) • 高温结构可用至+300°F (149°C)• 数种辅助执行器 • 端子型式可选择• 军用标准结构符合MIL-S- -8805• 所有4SE 开关均经UL 和CSA 认证• 4XE 开关经UL 认证电气额定值电 路 电气额定值代码单刀双掷 A 5A 电阻3A 电感(海平面)5A 电阻 2.5A 电感(50,000 ft)28 vdc 5A 电阻5A 电感125或250vac 60Hz D UL 额定值7A 250 vac 60Hz B UL 和CSA 额定值 5A 250vac 60Hz E 7A 电阻4A 电感(海平面)7A 电阻2.5A 电感(50,000 ft)28 vdcC 7A 电阻4A 电感(海平面) 7A 电阻 2.5A 电感(50,000 ft)28 vdc7A 电阻4A 电感(海平面)115 vac 400 HzR 1A 电阻0.50A 电感28 vdcSE 开关订货指南特性: O.F. 动作力; R.F. 释放力; P.T. 预行程; O.T. 超行程; D.T. 差动行程O.P. 操作位置特 性目录号 推荐 用于电气 额定 值代码O.F. N oz. R.F.最小 N oz. P.T.最大 mm in. O.T.最小 mm in. D.T.最大 mm in.O.P. mm in. 1SE1 大部分应用场合 A 1,39-4,73 5-17 1,11 4 1,27 .050 0,08 .003 0,1 .004 10,8 .425 1SE2 单刀单掷-常闭 A 1,39-4,73 5-17 1,11 4 1,27 .050 0,08 .003 0,1.004 10,8 .425 1SE3 单刀单掷-常开 A 1,39-4,73 5-17 1,11 4 1,27 .050 0,08 .003 0,1 .004 10,8 .425 4SE1 UL 和CSA 列举的引线 B 1,39-4,73 5-17 1,11 4 1,27 .050 0,08 .003 0,1 .004 10,8 .425 5SE1 防油 氟硅酮密封 A 1,39-4,73 5-17 1,11 4 1,27 .050 0,08 .003 0,1 .004 10,8 .425 1ft 引线(也 有其他长度供应) 图1 7SE1 低动作力 A 1,11-2,22 4-8 0,56 2 1,27 .050 0,08 .003 0,1 .004 10,8 .425 12SE4-T 高回程力 A 1,39-5,28 5-19 1,11 4 1,27 .050 0,08 .003 0,1 .004 10,8 .425 1SE1-T 用于用户 引线 A 1,39-4,73 5-17 1,11 4 1,27 .050 0,08 .003 0,1 .00410,8 .425图2环境密封的微动开关SE 系列SE 开关用辅助执行器的订货指南 (开关不包括执行器)特性: O.F. 动作力; R.F. 释放力; P.T. 预行程;O.T. 超行程; D.T. 差动行程O.P. 操作位置用安装在1SE1上的执行器测定的特性说明执行器长度A mm in.O.F .最大 N. oz. R.F .最小 N. oz. P.T.约 mm in. O.T.最小 mm in. D.T .最大 mm in. O.P. mm in. F.R. mm in. 图3 JE-1直刀形叶片 (包括安装用五金件)16,8 .663,34 120,56 23,81 .1500,38 .0150,64 .02511,2 .44015±0,76 .590±.030图4 JE-4滚轮刀形叶片滚轮相对开关轴旋转90°(包括安装用五金件)16,8 .663,34 120,56 23,81 .1500,38 .0150,64 .02516,3 .64020,1 .790 约图5 JE-5滚轮刀形叶片 (包括安装用五金件)14,2 .5603,34 120,56 23,81 .1500,38 .0150,64 .02516,3 .64020,1±0,76 .790±.030图6 JE-17反向位置滚轮刀形叶片(包括安装用五金件)14,2 .5603,34 120,56 23,81 .1500,38 .0150,64 .02516,3 .64020,1±0,76 .790±.030图7 JE-21滚轮杠杆 13,7 .5401,6760,28 12,54 .1000,25 .0100,41 .01616,3 .64018,8±0,76 .740±.030图8JE-22串列式滚轮杠杆7,8 .7004,73 171,11 42,54 .1000,15 .0060,3 .01216,8±1,3 .660±.05019,3±1,3 .760±.050环境密封的微动开关XE系列XE开关订货指南特性: O.F. 动作力; R.F. 释放力; P.T. 预行程;D.T. 差动行程O.P. 操作位置特性推荐用于电气额定值代码O.F.最大Noz.R.F.最大Noz.P.T.最大mmin.O.T.最小mmin.D.T.最大mmin.O.R.mmin.±.020(0,51) 1ft引线(亦有其他长度供应)1XE1(MS27994-1)大部分应用场合MIL-S-8805要求C 1,39-4,735-171,1141,27.0500,1.0040,13.00510,8.4251XE201(MS27994-4)一般用途MIL-S-8805要求MIL-W-22759/11导线C 1,39-4,735-171,1141,27.0500,1.0040,13.00510,8.4251XE3单刀单掷-常开 C1,39-4,735-171,1141,27.0500,1.0040,13.00510,8.4251XE301(MS27994-5)金触点MIL-W-22759/11导线R 1,39-4,735-171,1141,27.0500,1.0040,13.00510,8.4254XE1UL列出UL和CSA列出的引线D 1,39-4,735-171,1141,27.0500,1.0040,13.00510,8.4255XE1防油氟硅酮密封C 1,39-4,735-171,1141,27.0500,1.0040,13.00510,8.425图914XE1 小动作力可在+300°F(149°C)下使用E 2,50最大90,5620,76.0300,1.0040,13.00510,9.43014XE1-T用于用户引线可在300°F(149°C)下使用E 2,50最大90,5620,76.0300,1.0040,13.00510,9.430图101XE1-T(MS27994-3)用于用户引线 C1,39-4,735-171,1141,27.0500,1.0040,13.00510,8.425XE开关用辅助执行器订货指南(开关不包括执行器)特性: O.F. 动作力; R.F. 释放力; P.T. 预行程; O.T.超行程; D.T. 差动行程O.P. 操作位置F.P. 自由位置特性1XE1装有执行器目录号说明O.F.最大NOZR.F.最大Noz.P.T.约mmin.O.T.最小mmin.D.T.最大mmin.O.R.mmin.F.R.mmin.图11JM-1 直刀形叶片 5,84210,8333,18.1250,23.0090,3.01210,8±0,76.425±.03014±0,76.550±.030 图12JM-5 滚轮刀形叶片 5,84210,8333,18.1250,23.0090,3.01215,9±0,89.625±.03519,1±0,89.750±.035图3图4 图5直径宽滚轮含油铜滚轮直径直径宽宽滚轮 含油铜滚轮图8环境密封的微动开关SE 系列SE 安装尺寸(仅供参考)SE 开关20号引线脚安装孔可用销钉或22,1/.087最大直径的螺钉图1图2SE 辅助执行器直径宽含油铜滚轮直径宽含油铜滚轮图6图70,0 = mm 图例:0,00 = in.环境密封的微动开关XE系列XE安装尺寸(仅供参考)XE开关不锈钢柱塞不锈钢柱塞20号引线脚安装孔可用销钉或22,1/.087最大直径的螺钉图9图10XE辅助执行器直径宽滚轮图11图120,0 = mm图例:0,00 = in.SUNSTAR传感与控制/TEL:0755-********FAX:0755-********E-MAIL:**************SUNSTAR商斯达实业集团是集研发、生产、工程、销售、代理经销、技术咨询、信息服务等为一体的高科技企业,是专业高科技电子产品生产厂家,是具有10多年历史的专业电子元器件供应商,是中国最早和最大的仓储式连锁规模经营大型综合电子零部件代理分销商之一,是一家专业代理和分銷世界各大品牌IC芯片和電子元器件的连锁经营綜合性国际公司,专业经营进口、国产名厂名牌电子元件,型号、种类齐全。
Honeywell 霍尔效应微动开关 VX系列 说明书

特点:●插塞动作、数字输出● 低动作力● -40℃~70℃工作温度●可与固态电路直接相连● 反向电压保护● 坚固结构●经历超过1亿次动作寿命试验● 多种杠杆和执行件● 杠杆位于开关基体外部● 工业标准安装孔● 无外露连接器—标准插入固定式连接器● UL ,CSA 认可安装尺寸 (仅供参考)电气规格供电电压(VDC)供电电流(mA 最大值)输出类型输出电流(mA )4.5-2415电流沉10动作特性尺寸图特性:PT-预行程;DT-差动行程;OP-动作位置;OT-过行程端子插针与AMP 连接器相配: AMP102241-1MICRO SWITCH 型号:VX1A-带相配的连接器VX1A-01-带相配的连接器,预连导线长5.4″,24#注:所列型号的输出三极管为“常开”,插塞未受力时输出高电平,如要订购“常闭”型,即输出为低电平,把型号的第二位“0”变为“1”例如:VX10-A1—VX11-A1VX 订货指南型号可接受安普(AMP)插头VX10VX80VX10-A1VX80-A1VX10-A2VX80-A2VX10-A3VX80-A3VX10-B1VX80-B1VX10-C1VX80-C1动作力盎司牛顿0.35 ± 0.18(-.14)0.1(+0.05,-0.04)3.0 ± 0.880.83 ± 0.240.35 ± 0.20.1 ± 0.062.8 ± 1.10.78 ± 0.310.2 ± 0.10.06 ± 0.031.41 ± 0.500.39 ± 0.140.10 ± 0.070.03 ± 0.020.75 ± 0.35(-0.25)0.21(+0.1,-0.07)0.20+0.15(-0.10)0.06(+0.04,-0.03)1.55 ± 0.530.43 ± 0.150.40 ± 0.200.11 ± 0.063.0 ± 1.060.83 ± 0.29杠杆触发点(D )----21.8.86035.61.40059.42.34032.61.28520.6.810杠杆类型*--针型插塞A (短)A (中)A (长)B(模拟滚轮)C(短滚轮)P.T.(最大值)mm inches 2.16.0852.59.1025.33.2109.96.3925.21.2052.49.098O.T.(最小值)mm inches 1.02.0401.020.402.160.854.06.1601.910.751.02.040 D.T.(最大值)mm inches 0.300.012.036.0140.71.0281.32.0520.64.0250.33.013O.P.mm inches 14.73 ± 0.51.580 ± .02015.37 ± 0.690.605 ± 0.02715.34 ± 1.40.604 ± .05515.24 ± 2.64.600 ± 1.0418.52 ± 1.47.729 ± .05820.68 ± 0.69.814 ± 0.27*有其他形式可选,请与Honeywell 办事处联系。
微动开关说明

微动开关微动开关概要■微动开关的定义微动开关具有微小接点间隔和速动机构,用规定的行程和力进行开关动作的接点机构,被外壳覆盖,其外部有传动器,且外形较小。
下图为典型的微动开关构造的一个示例。
微动开关由5个大类的构成要素组成。
微动开关用语说明■一般用语(1)一般用语微动开关:具有微小接点间隔和快动机构,用规定的行程和规定的力进行开关动作的接点结构,用外壳覆盖,其外部有驱动杆的一种开关。
(以下称开关)有接点:在开关类型中,和具有开关特性的半导体开关相比,通过接点的机械开关来实现开关的功能。
接触形式:根据各种用途构成接点的电气输入输出电路[(16)中显示]。
额定值:一般指作为开关特性和性能的保证基准的值,例如额定电流、额定电压等,其前提是特定的条件(负载的种类、电流、电压、频率等)。
树脂固定(塑封端子):在端子部位用导线配线后,通过填充树脂来固定该部分,消除露出的带电部位来提高防滴性的方法。
绝缘电阻:指非连接端子间、各端子和不带电金属部位间、各端子和地间的电阻值。
耐压:在规定的测定部位加1分钟高电压后,不会引起绝缘损坏的临界值。
接触电阻:表示接点的接触部位的电阻,但一般表示包含弹簧和端子部位导体电阻的电阻值。
抗振性:误动作振动微动开关在使用时,由于振动闭合的接点在超过规定的时间内不分离的振动范围。
抗冲击性:耐久冲击指微动开关在运输中或者安装时不会受到由该机械冲击带来的各部位的损伤,并满足动作特性的范围内的冲击。
误动作冲击指微动开关使用时由于冲击闭合的接点在超过规定的时间内不分离的冲击范围。
(2)关于结构、构造的用语●微动开关的结构、构造(3)有关寿命的用语机械寿命:指接点不通电,以规定的操作频率将过行程(OT)设定为规格值使其运行时的开关寿命。
电气寿命:在接点上连接额定负载,以规定的操作频率将过行程(OT)设定为规格值进行开关时的开关寿命。
(4)标准试验状态开关的试验条件如下。
环境温度:20±2℃、相对湿度:65±5%RH、气压:(5)N水平参考值表示可靠度为60%(λ60)下的故障水平。
OMRON ZE、ZV、ZV2型中内置Z型一般微动开关 说明书
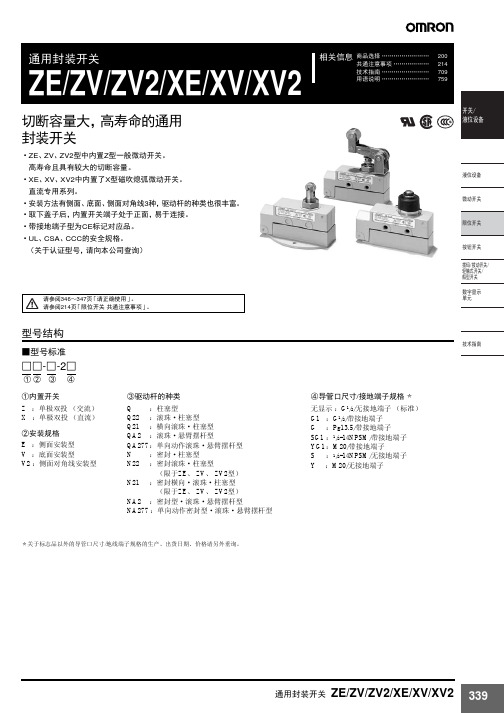
商品选择 ……………………200共通注意事项 ..................214技术指南 ........................709用语说明 (759)相关信息通用封装开关ZE/ZV/ZV2/XE/XV/XV2切断容量大,高寿命的通用 封装开关•ZE 、ZV 、ZV2型中内置Z 型一般微动开关。
高寿命且具有较大的切断容量。
•XE 、XV 、XV2中内置了X 型磁吹熄弧微动开关。
直流专用系列。
•安装方法有侧面、底面、侧面对角线3种,驱动杆的种类也很丰富。
•取下盖子后,内置开关端子处于正面,易于连接。
•带接地端子型为CE 标记对应品。
•UL 、CSA 、CCC 的安全规格。
(关于认证型号,请向本公司查询)请参阅346~347页「请正确使用」。
请参阅214页「限位开关 共通注意事项」。
型号结构■型号标准□□-□-2□①② ③ ④*关于标志品以外的导管口尺寸/地线端子规格的生产、出货日期、价格请另外垂询。
①内置开关Z :单极双投(交流)X :单极双投(直流)②安装规格E :侧面安装型V :底面安装型V2 :侧面对角线安装型③驱动杆的种类Q :柱塞型Q22:滚珠・柱塞型Q21:横向滚珠・柱塞型QA2:滚珠・悬臂摆杆型QA277:单向动作滚珠・悬臂摆杆型N :密封・柱塞型N22:密封滚珠・柱塞型(限于ZE 、ZV 、ZV2型)N21:密封横向・滚珠・柱塞型(限于ZE 、ZV 、ZV2型)NA2:密封型・滚珠・悬臂摆杆型NA277 :单向动作密封型・滚珠・悬臂摆杆型④导管口尺寸/接地端子规格 *无显示 :G 1/2/无接地端子(标准)G1:G 1/2/带接地端子G :Pg13.5/带接地端子SG1: 1/2-14NPSM/带接地端子YG1:M20/带接地端子S : 1/2-14NPSM/无接地端子Y :M20/无接地端子种类注1.侧面对角线安装的优点是密封性加强、可多个连接、安装螺钉M5提高了安装强度,此外安装宽度大(31×75mm ),安装比较稳定等。
人民电器 LXW5 系列微动开关 产品说明书

□ 安装地点的海拔不超过2000m;周围空气温度。
周围空气温度24h的平均值不超过+35℃湿度:安装地点在最高温度为+40℃时,空气的相对湿度不超过50%,在较低的温度下可以 允许有较高的相对湿度,例如20℃时达90%,对由于温度变化偶尔产生的凝露应采取特殊 的措施污染等级:3安装条件:安装在无显著摇动和无冲击振动的地方。
安装在无爆炸危险的介质中,且介质中无 足以腐蚀金属和破坏绝缘的气体及尘埃(包括导电尘埃)。
安装在没有雨雪侵袭的地方安装类别:Ⅲ。
□ :-5℃~+40℃;□;□ ;□;□正常工作条件和安装条件□□□□LXW5系列微动开关种类多,且有动作位置可调整的设计,如LXW5-11N1高开闭容量(15A)高精确度1.4操作速度范围广LXW5系列每一种型式具有焊接端子、螺丝端子和快速端子可供选择。
型号后面加A为焊接 端子,加C为快速端子,空白则为螺丝端子。
;;;特征LXW5系列微动开关适用于交流50Hz/60Hz,电压至380V,直流电压至220V的控制线路中,用于机械、纺织、电子仪器等机械设备的行程控制保护和联锁之用。
产品符合:GB/T 14048.5IEC60947-5-1标准。
产品概述选型指南164NC (常闭)NO (常开)公共端额定值接点型式主要技术数据外形及安装尺寸165mm 用户订货时须说明产品的型号、名称和数量。
例如:LXW511Q1100只。
-订货须知动作特性166。
Honeywell 微动开关(EX Series) 危险环境开关说明书

MICRO SWITCH™ Hazardous Location Switches Datasheet2What makes our switches better?Honeywell has over 80 years of switch manufacturing experiencecovering most environment types Proven technology plus superior quality and service are offeredworld-wide. The EX Series holds multiple agency approvals, including CE, IEC Ex, UL, CSA, and ATEX directives Multiple actuator options make the EX Series a good choice forindoor explosion-proof applications Smallest UL-listed, power-load carrying switch available for use inhazardous locationsMICRO SWITCH™ EX SeriesHazardous Location Limit SwitchesMICRO SWITCH™ EX Series switches feature the smallest UL-listed housings available for use in hazardous locations. The EX Series switch cavity is designed to cool expanding gases below the ignition temperature of the surrounding explosive atmosphere. The EX Series is capable of switching up to 20 amps while providing ample wiring space for ease of installation. Single and double conduit openings are available. Dual conduit openings may allow for through wiring of multiple switches. The EX Series can be mounted from any of the switch’s four sides.FLEXIBILITY IN MOUNTINGRELIABILITY • ACTUATION VARIETYManufactured for harsh and explosive environments3Features and BenefitsCOMPACT AND RUGGED HOUSINGOften used in applications where space is at a premium, MICRO SWITCH™ EX Series switches feature ample wiring space that eases installation time . The four-sided mounting with optional mounting bracket simplifies installation in most applications. The EX Series offers dual conduit openings on select models that allow for through wiring making it easier to wire multiple switches in a single circuit.WIDE VARIETY OF PRODUCT OFFERINGS AND VARIATIONSBroad range of actuator styles available in pin plunger and rotary configurations.Switching capacity from 1 A for low energy loads , up to 20 A for most industrial electrical loads.DESIGN FLEXIBILITYRotary actuators are field adjustable for quick set up and application adaptability. Roller lever actuators are adjustable through 360° of rotation. 1EX and 2EX listings have dual conduit openings enabling “wire through” or allowing the user to split the wiring of a double pole switch with one pole exiting each side.International approvals for use around the worldINDUSTRIAL PAINT BOOTHSPosition detecting in automated paint booths used by indoor industrial painting companiesAutomotive paint booth door position detection assures the door is closed before paint can be appliedPETROLEUM AND CHEMICAL PLANTSValve position in indoor potentially explosive environments in petroleum refineries and chemical plantsPROCESSING FACILITIESPosition sensing indoors at grain handling and processing plants, pulp and paperprocessing, lumber and other types of facilities where dust and other fine particlesin the atmosphere may create the potential for explosionsPotential ApplicationsEX Series1 Refer to order guide2 Most models, refer to individual specifications for selected catalog listings*Most models, refer to individual specifications for selected catalog listingsMICRO SWITCH™ Hazardous Location Limit Switches5EX Series*Note: CW (Clockwise) and CCW (Counter-Clockwise) when looking at nameplate. EX Series switches are not sealed against liquids and are not intended to be used in liquid splash environments or outdoor use without protection. NEMA 1, 7, 9 only.MICRO SWITCH™ Hazardous Location Limit Switches*Note: CW (Clockwise) and CCW (Counter-Clockwise) when looking at nameplate. EX Series switches are not sealed against liquids and are not intended to be used in liquid splash environments or outdoor use without protection. NEMA 1, 7, 9 only.78EX SeriesFigure 1. MICRO SWITCH™ EX Series, no leverFigure 2. MICRO SWITCH™ EX Series, side rotary Figure 3. MICRO SWITCH™ EX Series, side rotary with two conduit openingsFigure 4. MICRO SWITCH™ EX Series, one-way lever Figure 6. MICRO SWITCH™ EX Series, top pin plungerFigure 5. MICRO SWITCH™ EX Series, rod leverFigure 7. MICRO SWITCH™ EX Series, boot sealedFigure 8. MICRO SWITCH™ EX Series, manually actuatedDIMENSIONAL DRAWINGS mm [in]MICRO SWITCH™ Hazardous Location Limit SwitchesTable 5. Replacement Catalog Listings* Order levers separatelyGROUNDING SCREW ASSEMBLY(for equipped models only)910EX Series1EX12EX14EX1-34EX5-3EXA-AR EXA-AR20EXA-AR62EXA-N EXA-Q EX-AR EX-AR128EXAR-141EX-AR16This datasheet supports the following MICRO SWITCH™ EX Series Hazardous Location Limit SwitchesEX-AR1613EX-AR1620EX-AR-1621EX-AR182EX-AR20EX-AR230EX-AR30EX-AR400EX-AR420EX-AR471-15EX-AR471-3EX-AR50EX-AR68EX-AR8EX-AR800EX-AR830EX-AR87EXD-AR20-3EXD-AR-3EXD-AR30-3EXD-AR30-6EXD-AR62-3EXD-AR87-3EXD-N-3EXD-Q26-2EXD-Q-3EXD-Q62-3EXH-AR2EXH-AR3EXH-AR33EXH-AR7EXH-AR7-R1EXH-NEXH-Q26-2EXHT -AR EXHT -AR403EXHT -Q EX-N15EX-N152EX-Q EX-Q1EX-Q171EX-Q173EX-Q19EX-Q22EX-Q400EX-Q62EX-Q80015PA85-EX 19PA4-EX 33PA1-EX 33PA5-EX 33PA6-EX 33PA7-EX 6PA126-EX 6PA127-EX6PA130-EX 6PA136-EX 6PA138-EX 6PA142-EX 6PA204-EX 6PA5-EX 8PA12-EX 8PA15-EX 8PA77-EX EX-XR3EX-XR9EX-YQ-3MICRO SWITCH™ Hazardous Location Limit Switches4EX1-3üüü 3 ft4EX5-3üüü 3 ft11EX SeriesADDITIONAL INFORMATIONThe following associated literature is available on the Honeywell web site at :• Product installation instructions• Product range guide• Hazardous location switches product brochure• Product application-specific information– Applicaiton note: Electronic sensors and electromechanicalswitches in valves and flow meters– Application note: Industrial waste water treatment– Application note: Sensors and switches for industrial manualprocess valves– Sensors and switches in oil rig applicationsWARRANTY/REMEDYHoneywell warrants goods of its manufacture as being free of defective materials and faulty workmanship. Honeywell’s standard product warranty applies unless agreed to otherwise by Honeywell in writing; please refer to your order acknowledgement or consult your local sales office for specific warranty details. If warranted goods are returned to Honeywell during the period of coverage, Honeywell will repair or replace, at its option, without charge those items it finds defective. The foregoing is buyer’s sole remedy and is in lieu of all other warranties, expressed or implied, including those of merchantability and fitness for a particu-lar purpose. In no event shall Honeywell be liable for conse-quential, special, or indirect damages.While we provide application assistance personally, through our literature and the Honeywell website, it is up to the customer to determine the suitability of the product in the application. Specifications may change without notice. The information we supply is believed to be accurate and reliable as of this printing. However, we assume no responsibility for its use.002390-1-EN IL50 GLO November 2014Copyright © 2014 Honeywell International Inc. All rights reserved.Sensing and Control Honeywell1985 Douglas Drive North Golden Valley, MN 55422 Find out moreHoneywell serves its customers through a worldwide network of sales offices, representatives and distributors. For application assistance, current specifications, pricing or name of the nearest Authorized Distributor, contact your local sales office.To learn more about Honeywell’s sensing and control products, call +1-815-235-6847 or 1-800-537-6945,visit , or e-mail inquiries to *********************。
微动开关说明
微动开关微动开关概要使用注意事用语说明项微动开关故障解决Q&A■微动开关的定义微动开关具有微小接点间隔和速动机构,用规定的行程和力进行开关动作的接点机构,被外壳覆盖,其外部有传动器,且外形较小。
下图为典型的微动开关构造的一个示例。
微动开关由5个大类的构成要素组成。
微动开关用语说明■一般用语(1)一般用语微动开关:具有微小接点间隔和快动机构,用规定的行程和规定的力进行开关动作的接点结构,用外壳覆盖,其外部有驱动杆的一种开关。
(以下称开关)有接点:在开关类型中,和具有开关特性的半导体开关相比,通过接点的机械开关来实现开关的功能。
接触形式:根据各种用途构成接点的电气输入输出电路[(16)中显示]。
额定值:一般指作为开关特性和性能的保证基准的值,例如额定电流、额定电压等,其前提是特定的条件(负载的种类、电流、电压、频率等)。
树脂固定(塑封端子):在端子部位用导线配线后,通过填充树脂来固定该部分,消除露出的带电部位来提高防滴性的方法。
绝缘电阻:指非连接端子间、各端子和不带电金属部位间、各端子和地间的电阻值。
耐压:在规定的测定部位加1分钟高电压后,不会引起绝缘损坏的临界值。
接触电阻:表示接点的接触部位的电阻,但一般表示包含弹簧和端子部位导体电阻的电阻值。
抗振性:误动作振动微动开关在使用时,由于振动闭合的接点在超过规定的时间内不分离的振动范围。
抗冲击性:耐久冲击指微动开关在运输中或者安装时不会受到由该机械冲击带来的各部位的损伤,并满足动作特性的范围内的冲击。
误动作冲击?指微动开关使用时由于冲击闭合的接点在超过规定的时间内不分离的冲击范围。
(2)关于结构、构造的用语●微动开关的结构、构造(3)有关寿命的用语机械寿命:指接点不通电,以规定的操作频率将过行程(OT)设定为规格值使其运行时的开关寿命。
电气寿命:在接点上连接额定负载,以规定的操作频率将过行程(OT)设定为规格值进行开关时的开关寿命。
(4)标准试验状态开关的试验条件如下。
微动开关工作原理

微动开关工作原理
微动开关是一种常见的电子元件,广泛应用于各种电子设备中。
它的工作原理
是通过微小的机械运动来控制电路的通断,从而实现设备的启停或功能切换。
下面我们将详细介绍微动开关的工作原理。
首先,微动开关由外壳、触点、弹簧和手柄等部件组成。
当手柄施加力量使得
触点发生位移时,弹簧会产生弹力,使得触点恢复原位。
这种微小的机械运动通过触点的开闭来控制电路的通断,实现设备的控制功能。
微动开关的工作原理基于电路的开闭。
当手柄施加力量使得触点闭合时,电路
通路形成,电流得以通过;相反,当手柄使得触点断开时,电路断路,电流无法通过。
这种开闭状态的切换,实现了设备的启停或功能切换。
微动开关的工作原理还涉及到触点的材料和结构。
触点通常采用金属材料,具
有良好的导电性和机械弹性,能够承受频繁的开闭操作。
同时,触点的结构设计也影响着开关的性能,如接触面积、接触压力等参数都会影响触点的稳定性和可靠性。
除此之外,微动开关的工作原理还与外部环境因素有关。
例如,温度、湿度、
尘埃等因素都可能影响开关的性能,甚至导致故障。
因此,在实际应用中,需要考虑这些因素对微动开关的影响,选择合适的型号和材质,进行合理的防护和维护。
总的来说,微动开关的工作原理是基于微小的机械运动和电路的开闭。
通过手
柄施加力量使得触点开闭,控制电路的通断,实现设备的控制功能。
同时,触点的材料和结构、外部环境因素等也会影响开关的性能。
因此,在设计和选择微动开关时,需要综合考虑这些因素,以确保其稳定可靠地工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微动开关微动开关概要使用注意用语说明事项微动开关故障解决Q&A■微动开关的定义微动开关具有微小接点间隔和速动机构,用规定的行程和力进行开关动作的接点机构,被外壳覆盖,其外部有传动器,且外形较小。
下图为典型的微动开关构造的一个示例。
微动开关由5个大类的构成要素组成。
微动开关用语说明■一般用语(1)一般用语微动开关:具有微小接点间隔和快动机构,用规定的行程和规定的力进行开关动作的接点结构,用外壳覆盖,其外部有驱动杆的一种开关。
(以下称开关)有接点:在开关类型中,和具有开关特性的半导体开关相比,通过接点的机械开关来实现开关的功能。
接触形式:根据各种用途构成接点的电气输入输出电路[(16)中显示]。
额定值:一般指作为开关特性和性能的保证基准的值,例如额定电流、额定电压等,其前提是特定的条件(负载的种类、电流、电压、频率等)。
树脂固定(塑封端子):在端子部位用导线配线后,通过填充树脂来固定该部分,消除露出的带电部位来提高防滴性的方法。
绝缘电阻:指非连接端子间、各端子和不带电金属部位间、各端子和地间的电阻值。
耐压:在规定的测定部位加1分钟高电压后,不会引起绝缘损坏的临界值。
接触电阻:表示接点的接触部位的电阻,但一般表示包含弹簧和端子部位导体电阻的电阻值。
抗振性:误动作振动微动开关在使用时,由于振动闭合的接点在超过规定的时间内不分离的振动范围。
抗冲击性:耐久冲击指微动开关在运输中或者安装时不会受到由该机械冲击带来的各部位的损伤,并满足动作特性的范围内的冲击。
误动作冲击?指微动开关使用时由于冲击闭合的接点在超过规定的时间内不分离的冲击范围。
(2)关于结构、构造的用语●微动开关的结构、构造(3)有关寿命的用语机械寿命:指接点不通电,以规定的操作频率将过行程(OT)设定为规格值使其运行时的开关寿命。
电气寿命:在接点上连接额定负载,以规定的操作频率将过行程(OT)设定为规格值进行开关时的开关寿命。
(4)标准试验状态开关的试验条件如下。
环境温度:20±2℃、相对湿度:65±5%RH、气压:101.3kPa (5)N水平参考值表示可靠度为60%(λ60)下的故障水平。
λ60=0.5×10-6/次表示在可靠度为60%下,故障率为次以下。
(6)接点的形状和种类(7)接点间隔接点间隔规定为0.25mm、0.5mm、1.0mm、1.8mm 4种。
接点间隔是设计时的目标。
使用时,需要最小接点间隔的话请另外确认后进行选择。
一般接点间隔的标准为0.5mm。
对于相同的开关机构,接点间隔越小MD就越小,灵敏度也越高,机械方面的寿命(寿命)也越长,但直流的断路性能和抗振动、抗冲击方面就不利了。
微动开关由于电流开关会损耗接点,接点间隔变大,MD加大则灵敏度下降,因此为了实现高灵敏度使用接点间隔0.25mm的微动开关时,必须保持较小的开关电流,以减小电流开关引起的接点损耗。
接点间隔大的产品,抗振动、抗冲击性和断路性能良好。
关于MD (应差距离)请参见(10)动作特性用语(745页)。
横杆(7)接点间隔接点间隔规定为0.25mm、0.5mm、1.0mm、1.8mm 4种。
接点间隔是设计时的目标。
使用时,需要最小接点间隔的话请另外确认后进行选择。
一般接点间隔的标准为0.5mm。
对于相同的开关机构,接点间隔越小MD就越小,灵敏度也越高,机械方面的寿命(寿命)也越长,但直流的断路性能和抗振动、抗冲击方面就不利了。
微动开关由于电流开关会损耗接点,接点间隔变大,MD 加大则灵敏度下降,因此为了实现高灵敏度使用接点间隔0.25mm 的微动开关时,必须保持较小的开关电流,以减小电流开关引起的接点损耗。
接点间隔大的产品,抗振动、抗冲击性和断路性能良好。
☆:优◎:良○ :普通△:劣(8)速动机构速动机构,可以使可动接点迅速地从一个固定接点移动到其他固定接点,而尽可能不受操作速度的影响。
例如,即使是闸刀开关,如果快速操作手柄,动作就会变快,但是,操作手柄的速度与接点运动速度相关的这种机构不叫速动型,而叫做缓动型。
接点的开关速度越快,接点间产生电弧的持续时间就会越短。
这样,就会导致接点的消耗、损伤减少,并可以维持稳定的特性。
但是,在该开关速度中,除有效减少电弧量的速度界限(经济速度)外,也有机械问题的界限,特别是,闭路时如果开关速度过快,可动接点与固定接点的冲击能量就会变大,冲击形成的跳跃现象(振动或摩擦闭合)会产生电弧,此时会严重损耗接点,有时还会不能打开电路,导致接点熔化。
进行这种快速动作的机构,一般会使用具备死点(从一个状态跳跃性地变化到其他状态时的临界作用点)的弹簧机构。
下图表示将拉力弹簧和压缩弹簧进行组合后,形成微动开关速动机构的示例。
以下就有关双投型(Z)速动机构的动作原理进行说明。
如下图所示,为开关的力的关系。
在未对传动器施加外力的自由位置中,由于受到2个力-F2与F0的影响,压缩弹簧的反作用力F1处于平衡状态。
F0为将可动接点c推到固定接点b的压力。
接着,通过传动器对拉力弹簧的一部分施加力,使拉力弹簧移位,此时,N点的力F1和F2将依次变大,夹角接近180°,不久,仅F1和F2处于平衡状态,即F0=0。
从自由位置到F0=0间存在滑动作用,会使接点向水平方向移动,并进一步弯曲压缩弹簧。
从F0=0的位置,通过进一步施加外力,使拉力弹簧微量移位,就会产生反方向的力-F0,以弯曲压缩弹簧的最大强力将可动接点c 从下方向压出,可动接点c 就会穿过空间向对面的固定接点a 移动。
利用这一动作原理,微动开关以开关固有的切换速度(离开速度)切换接点,而与按住拉力弹簧时产生外力的速度无关。
F0=0时的位置称为动作位置,与拉力弹簧的一部分通过死点的位置基本一致。
消除外力进行复位操作时,也是基于相同的原理,而此时弹簧的弯曲反作用力即为复位原动力。
微动开关基于拉力弹簧和压缩弹簧的组合进行动作的原理图(9)接触电阻·接点接触力特性接触电阻根据接点接触力而变化,下图表示了其关系。
接点接触力变大的话接触电阻变得较稳定(变小),相反当接触力变小的话就开始变得不稳定(变大)。
接触电阻·接点接触力特性(10)动作特性的相关用语动作特性的定义分类用语略称单位偏差表示方法定义力动作力(OperatingForce)OF N最大从自由位置运行到动关于偏差的解释例(例)Z-15G-B OF(动作力)2.45~3.43N解释:表示将加在驱动杆上的力从0开始增加到3.43N,无论哪个开关都应动作。
开关行程的设定请参考750页的「①关于操作行程设定」。
(11)力、冲程、接点接触力特性微动开关的动作特性用力、冲程特性来表示。
下图表示这一特性。
即将横轴冲程(传动器的行程)施加到纵轴传动器上,取得此时所施加的力。
微动开关的特点如下:①在动作时和还原时,力急剧变动,同时发出开关的切换音,由此可以判断开关的动作位置(OP) 和复位位置(RP)。
②由于存在响应差的行程(MD),因此,即使操作传动器的操作体产生移动或上下晃动,可动接点中的其中一个固定接点也是稳定的,因此,可动接点适用于机械检测用开关。
③由于接点的切换会快速进行,因此,在电流开关时电弧连接时间较短的小型开关中,可以开关较大的电流。
下图表示冲程和接点接触力的关系。
在自由状态下,随着将传动器逐渐押入,接点接触力将会逐渐减少,而到达OP后,接点接触力将会变为零,可动接点从常闭(NC)向常开(NO)反转,随即产生接触力。
如果再次押入传动器,NO侧的接触力将会增大。
传动器复位时,NO侧变为零,接着就会在NC侧产生接触力。
(12)接点切换时间操作速度和接点切换时间的关系如右图所示。
随着传动器的操作速度逐渐变慢,接点切换时间会逐渐变长。
因此,应用规定的最小操作速度来测定接点切换时间。
下图中的测定电流规定为如下:微小负荷用微动开关的通电电流为1mA,一般用途微动开关的通电电流为100mA。
如下图所示,接点切换时间为不稳定时间、反转时间及振动时间之和,一般微动开关的接点切换时间为5~15msec。
这里,不稳定时间是由接触电阻不稳定引起的,而接触电阻不稳定是由前述接点反转前的接点接触力降低及接点摩擦闭合所导致的。
速动机构的机械反转会产生反转时间。
可动接点冲击固定接点时的振动会产生振动时间。
不稳定时间和振动时间会使接点发热,引起接点熔化,而在和电子电路连接后,还可能会引起电子电路的误动作。
因此,设计微动开关时,应尽量缩短不稳定时间和振动时间。
(13)接点的摩擦闭合根据速动机构的种类不同,有的微动开关在接点部几乎不发生摩擦闭合(滑动)。
摩擦闭合作用,指可动接点在某一接触力下在固定接点面上滑动的动作。
下图表示可动接点动作时和复位时的摩擦闭合说明图。
摩擦闭合会产生两种效果,即对接点表面的净化作用和因冲击电流等引起接点熔化时的跳闸作用。
(14)端子符号和接触形符号端子符号COM 共通端子NC 常闭端子NO 常开端子(15)端子的种类注. 此外,还有端子连接部为塑封的带导线产品和单触连接器对应型产品。
(16) 接触类型的种类■关于EN61058-1规格的用语·防触电保护等级:表示防触电的等级,有如下4个等级。
Class 0:作为防触电措施只用基本绝缘来保护。
Class Ⅰ:作为防触电措施除了基本绝缘以外还加上地线来保护。
ClassⅡ:作为防触电措施用双重绝缘或加强绝缘来保护,不需要接地。
ClassⅢ:作为防触电措施,由于使用了安全超低电压(50VAC以下,或者70VDC以下)电路,因此不需要采取防触电措施。
·Proof Tracking Index (PTI):指抗漏电指数。
是在供试品中插入2根电极将规定的溶液(氯化铵0.1%)向电极间滴落50滴而不发生短路的最大耐压值,有以下5种等级。
UL黄皮书的CTI值和PTI的关系如下表所示。
·操作次数:表示规格中规定的耐久试验的开关次数。
各厂家从下表的次数中选择,在开关上用符号表示。
在IEC规格中高频率操作的开关标准为50000次,低频率操作的开关标准为10000次。
·使用环境温度:开关可使用的温度范围。
表示符号的含义请参考下表。
·焊接端子型1:根据焊接端子的耐热性来区分的一种类型,满足下面的试验条件。
焊接槽使用端子:在+235 ℃的焊接槽中按规定的速度、时间、深度放入焊接端子,端子应没有松动,绝缘距离应无变化。
钎焊烙铁使用端子:在按规定的钎焊烙铁的尖端温度+350℃下,将直径0.8mm的焊锡在端子上溶化2~3秒,端子应没有松动,绝缘距离应无变化。
·焊接端子型2:根据焊接端子的耐热性来区分的一种类型,满足下面的试验条件。
焊接槽使用端子:在+260℃的焊接槽中按规定的速度、时间、深度放入焊接端子,端子应没有松动,绝缘距离应无变化。