感应同步器工作原理
感应同步器的原理及应用

感应同步器的原理及应用1. 什么是感应同步器感应同步器,又称为电感同步器或感应电机,是一种利用感应原理实现同步转速的电动机。
2. 感应同步器的工作原理感应同步器的工作原理是基于电磁感应现象。
当感应同步器的转子受到旋转磁场的作用,通过电感感应产生感应电流,进而产生旋转磁场,与定子磁场相互作用,使感应同步器能够按照旋转磁场的转速同步运转。
3. 感应同步器的结构组成感应同步器的结构主要包括定子和转子两部分。
3.1 定子定子是感应同步器的固定部分,由定子线圈和定子铁心组成。
定子线圈通电产生旋转磁场,从而通过感应作用引起转子运动。
3.2 转子转子是感应同步器的动态部分,由铁芯和导体线圈组成。
转子线圈通电时,产生电流,同时也会产生磁场,并与定子的磁场相互作用,从而实现同步运转。
4. 感应同步器的主要应用感应同步器广泛应用于各种机械设备和工业系统中,以下是几个主要的应用领域:4.1 电机驱动系统感应同步器通常用作电机驱动系统的电源,它能够提供高效率、可靠性和稳定性的转速控制。
在工业设备、机器人和家电等领域得到广泛应用。
4.2 电力系统感应同步器可用于电力系统的配电、传输和控制中。
它能够实现电能的传输与布局,提高电力系统的效率和稳定性。
4.3 可再生能源感应同步器在可再生能源领域具有重要作用,例如风力发电和水力发电。
通过控制感应同步器的转速,可以实现电力的高效转换和储存。
4.4 自动化控制感应同步器在自动化控制系统中也扮演重要角色。
它可以用于滑动门、电梯、智能家居等场景中,实现运动控制和位置感知。
4.5 交通运输感应同步器广泛应用于交通运输领域,如电动汽车、高铁和电动自行车等。
它们可以提供高效能源转换和精确控制,促进交通运输的发展和改善。
5. 总结感应同步器是一种利用感应原理实现同步转速的电动机,通过电磁感应现象使转子能够按照旋转磁场的转速同步运转。
感应同步器在电机驱动系统、电力系统、可再生能源、自动化控制和交通运输等领域有着广泛的应用。
感应同步器旋转式工作原理

感应同步器旋转式工作原理
感应同步器旋转式工作原理如下:
1. 磁感应原理:感应同步器旋转式的工作原理基于磁感应现象。
当一个导体相对于磁场运动时,会在导体中产生感应电动势。
这是因为磁场的变化引起了导体中的自由电子运动,从而产生了感应电流。
2. 结构:感应同步器旋转式由一个旋转的金属盘和一个恒定的磁场组成。
金属盘上有一系列的刷子,且刷子与电源相连。
3. 工作过程:当金属盘转动时,刷子与磁场之间的相对运动导致感应电动势的产生。
这些感应电动势通过刷子与电源相连,形成了感应电流。
感应电流可以通过电源输入,也可以用于驱动电动机等设备。
刷子的数量与金属盘上的金属片数量相对应,以确保电流正常流动。
4. 等效电路:感应同步器旋转式的等效电路通常由一个电源、一个旋转式金属盘和一个外部负载组成。
通过控制电源和金属盘的转速,可以调整感应同步器的输出电流和电压。
总结:感应同步器旋转式通过磁感应原理将机械能转化为电能,并通过旋转的金属盘和刷子之间的相对运动产生感应电动势。
这种设备在电力传输、发电机和电动机等领域中得到广泛应用。
感应同步器的工作原理
感应同步器的工作原理
感应同步器是一种电力传动装置,用于控制电力机械的旋转速度和方向。
其工作原理基于磁场感应和电动机的运动学原理。
感应同步器由两个电动机组成,一个称为感应电动机,另一个称为同步电动机。
感应电动机的转子由铜圆环和铁心构成,电感为整圆筒形;同步电动机的转子为大功率电动机,由多极磁铁和铁心构成。
当感应同步器的感应电动机运转时,电流在铜圆环中形成旋转磁场。
该旋转磁场引起在同步电动机的磁铁中产生磁场,在同步电动机中也产生旋转磁场。
由于同步电动机的转子具有多极磁铁,所以它的旋转速度是固定的,称为同步速度。
感应电动机的转速可能高于或低于同步速度,当它的转速低于同步速度时,它的旋转磁场和同步电动机的旋转磁场产生相互作用,从而产生转矩,使感应电动机逐渐加速。
一旦感应电动机达到同步速度,旋转磁场和同步电动机的旋转磁场就同步了。
感应同步器的转矩与铜圆环所产生磁场的强度成正比,因此,如果减小铜圆环内的电流强度,就可以减小感应同步器产生的转矩。
这种方法可用于控制电机的速度和方向。
总之,感应同步器的工作原理基于磁场感应和电动机的旋转速度的同步原理。
当
感应电动机的转速低于同步速度时,感应同步器会产生转矩,使电动机逐渐加速,直至达到同步速度。
使用感应同步器可以控制电动机的速度和方向,广泛用于工业和交通领域。
感应同步器的组成和原理
感应同步器的组成和原理感应同步器的组成和原理2009年10月22日感应同步器分为直线型和旋转型两大类,直线型由定子和滑尺组成,用于检测直线位移,旋转型由定子和转子组成,用于检测旋转角度。
本节仅介绍直线型感应同步器的组成和原理:如图3 15所示,直线型感应同步器由定尺和滑尺组成。
其定尺是单向均匀感应绕组,绕组节距 2 T通常为2mm。
滑尺上有两组励磁绕组,一组称为正弦绕组,另一组为余弦绕组,两个绕组的节距与定子相同,在空间上相互错开 1 /4节距,于是两个励磁绕组之间相差90°电角度。
滑尺安装在被测的移动部件上,滑尺与定尺相互平行,并保持一定的距离,约0.2〜0.3mm 向滑尺通以交流励磁电压,在滑尺中产生勋磁电流,绕组周围便产生按正弦规律变化的磁场。
由电磁感应在定尺绕组上产生感应电压,当滑尺和定尺间产生相对位移时,由于电磁磁耦合强度的变化,就使定尺上的感应电压随位移的变化而变化。
定尺图3 -15直线型感应同步器1 -正弦励磁绕组2—余眩励建绕组、感应同步器种类和特点l感应同步器的种类感应同步器有测量长度用的直线式和测量旋转角度用的旋转式两种。
下面着重介绍直线式••(1) 标准式:是直线式中精度最高的一种,使用最广,在数控系统和数显装置中大量应用:常用型号为GZD —1 和GZH —1 型。
(2) 窄长式:其定尺的宽度比标准式窄,用于精度较低或机床上安装位置窄小且安装面难以加工的情况。
(3) 三重式:它的滑尺和定尺上均有粗、中、细:套绕组.定尺上粗中绕组相对位移垂直方向倾斜不同角度,细绕组和标准式的一样。
滑尺上的粗、中、细三套绕组组成:个独立的电气通道,粗、中、细的极距分别是4000、100和2mm 三通道同时使用即可组成一套绝对坐标测量系统,测量范围为0 .002〜2000mm 在此测量范围内测量系统只有一个绝对零点。
单块定尺的长度有200和300mm 两种,它特别适用于大型机床、。
(4) 带子式:它的定尺绕组是印制在 1.8m 长的不锈钢带上,其两端固定在机床床身上(一端用弹性固定)滑尺像计算尺的游框那样跨在带状定尺上,可以简化安装,减少安装面,而且能使定尺随机床床身热变形而变形。
感应同步器

p N / 2 2 L
哈尔滨工业大学航天学院 控制与仿真中心
9.3.2 感应同步器的工作原理—旋转
• 感应电势的瞬时值 领先激磁电压90°。 若激磁电压为
u 2U sin t U m sin t
es 2 E0 m sin
2 cos t L
L/2
ec 2 E m cos
9.3.2 感应同步器的工作原理—直线
定尺 V2 滑 尺 位 置 A 1 L B 4 1 C L 2 3 D L 4 E L A M O C B C D N E 正弦绕组 P x
余弦绕组
哈尔滨工业大学航天学院 控制与仿真中心
9.3.2 感应同步器的工作原理—直线
V2
A M O B 余弦绕组 C N D
•定尺绕组通1-10kHz交流 电激磁 , 产生一个多极 的脉振磁场, •磁极之间的距离是τ, 磁场分布周期是节距L。 •脉振磁场在滑尺绕组上 产生感应电势, 有效值 随滑尺位移作周期性变 化,周期为节距L。
哈尔滨工业大学航天学院 控制与仿真中心
9.3.2 直线感应同步器的工作原理
哈尔滨工业大学航天学院 控制与仿真中心
9.3.3 感应同步器的信号处理方式
鉴幅型处理方式—根据信号的幅值鉴别电角 1)两相激磁式
给Hale Waihona Puke 激磁电压幅值如下感应 绕组
激磁 绕组
1为指令位移角,是已知的。单相连续绕组的总感应电势为
哈尔滨工业大学航天学院 控制与仿真中心
9.3.3 感应同步器的信号处理方式
2)单相激磁式
给定激磁电压 在正弦绕组和余弦绕组的 感应电势分别为 送入函数变压器或 其他装置中处理 送入加法器相加后作为输出信号输出
第8课 感应同步器教案
I、示标II、复习1、旋转变压器的结构和工作原理2、旋转变压器的应用III、新授第二节感应同步器一、感应同步器的结构和工作原理感应同步器是从旋转变压器发展而来的,也是一种电磁式的检测传感器,按其结构可分为直线式和旋转式两种。
这里着重介绍直线式感应同步器。
直线式感应同步器用于直线位移的测量,其结构相当于一个展开的多极旋转变压器。
它的主要部件包括定尺和滑尺,定尺安装在机床床身上,滑尺则安装于移动部件上,随工作台一起移动。
两者平行放置,保持0.2~0.3mm的间隙,如图3.4所示。
A-正弦励磁绕组;B-余弦励磁绕组图3.4 感应同步器结构示意图标准的感应同步器定尺长250mm,尺上有单向、均匀、连续的感应绕组;滑尺长100mm,尺上有两组励磁绕组,一组叫正弦励磁绕组,如图3.4中A所示,一组叫余弦励磁绕组,如图3.4中B所示。
定尺和滑尺绕组的节距相同,用2τ表示。
当正弦励磁绕组与定尺绕组对齐时,余弦励磁绕组与定尺绕组相差1/4节距。
由于定尺绕组是均匀的,故表示滑尺上的两个绕组在空间位置上相差1/4节距,即π/2相位角。
定尺和滑尺的基板采用与机床床身材料的热膨胀系数相近的低碳钢,上面有用光学腐蚀方法制成的铜箔锯齿形的印刷电路绕组,铜箔与基板之间有一层极薄的绝缘层。
在定尺的铜绕组上面涂一层耐腐蚀的绝缘层,以保持尺面。
在滑尺的绕组上面用绝缘的粘接剂粘贴一层铝箔,以防静电感应。
感应同步器的工作原理与旋转变压器的工作原理相似。
当励磁绕组与感应绕组间发生相对位移时,由于电磁耦合的变化,感应绕组中的感应电压随位移的变化而变化,感应同步器和旋转变压器就是利用这个特点进行测量的。
所不同的是,旋转变压器是定子、转子间的旋转位移,而感应同步器是滑尺和定尺间的直线位移。
图3.5说明了定尺感应电压与定尺、滑尺绕组的相对位置的关系。
若向滑尺上的正弦绕组通以交流励磁电压,则在定子绕组中产生励磁电流,因而绕组周围产生了旋转磁场。
这时,如果滑尺处于图中A点位置,即滑尺绕组与定尺绕组完全对应重合,则定尺上的感应电压最大。
感应同步器工作原理

感应同步器工作原理
感应同步器工作原理是通过感应器检测到外部触发信号来实现同步。
其主要组成部分包括感应器、信号处理器和执行器。
感应器负责检测外部触发信号,常用的感应器有光电传感器、压电传感器和声音传感器等。
感应器将检测到的信号转化为电信号输出,作为信号处理器的输入。
信号处理器接收感应器输出的电信号,并对其进行处理和解析。
首先,信号处理器会判断输入信号是否满足触发条件,例如光电传感器可以判断光线是否足够强烈。
若触发条件满足,则信号处理器会生成一个触发脉冲信号,用于控制执行器的动作。
信号处理器还可以进行信号的处理,例如滤波、放大和数字转换等,以提高系统的可靠性和精度。
执行器是根据信号处理器生成的触发脉冲信号来执行相应的动作。
执行器可以是电动机、继电器、气缸等,根据实际需求选择不同类型的执行器。
当感应器检测到外部触发信号时,感应同步器会按照以上的工作原理进行处理,从而实现外部信号的同步。
这在许多自动化系统中是非常常见的应用,例如自动门、自动灯光控制和自动输送线等。
通过感应同步器的工作,可以实现设备之间的协调运行,提高工作效率和安全性。
感应同步器的工作原理

感应同步器的工作原理
感应同步器
感应同步器是一种电磁式位置检测元件,按其结构特点分为直线式和旋转式(圆盘式)两种。
直线式感应同步器由定尺和滑尺组成;旋转式感应同步器由定子和转子组成。
前者用于测量直线位移,用于全闭环伺服系统,后者用于测量角位移,用于半闭环伺服系统。
它们的工作原理都与旋转变压器相似。
感应同步器的工作原理
感应同步器是利用励磁绕组与感应绕组间发生相对位移时,由于电磁耦合的变化,感应绕组中的感应电压随位移的变化而变化,借以进行位移量的检测。
见图所示。
感应同步器滑尺上的绕组是励磁绕组,定尺上的绕组是感应绕组。
。
说明感应同步器的原理及应用
说明感应同步器的原理及应用一、感应同步器的原理感应同步器是一种使用感应原理来实现同步的设备。
它通过感应信号的变化来实现不同设备之间的同步操作。
感应同步器的原理主要包括以下几个方面:1.感应原理:感应同步器利用感应原理来实现同步。
它通过检测感应信号的变化来确定设备的状态,从而进行同步操作。
2.感应信号:感应同步器需要接收感应信号,并根据信号的变化来实现同步。
感应信号可以是各种形式的电信号,比如电压、电流、频率等。
3.感应电路:感应同步器内部配备有感应电路,用于接收和处理感应信号。
感应电路可以对信号进行放大、滤波、逻辑判断等操作,以实现同步的目的。
4.同步操作:感应同步器根据感应信号的变化来进行同步操作。
同步操作可以是启动、停止、调节等,具体操作方式取决于设备的需求。
二、感应同步器的应用感应同步器的应用非常广泛,特别是在自动化控制、工业生产等领域中有着重要的作用。
以下是感应同步器的一些主要应用:1. 自动化生产线感应同步器在自动化生产线中起到关键作用。
它可以通过感应信号来实现各个设备之间的同步操作,比如设备的启动、停止、节奏调整等。
这样可以提高生产效率,减少人工干预,提高产品的质量和稳定性。
2. 电力系统感应同步器在电力系统中也有重要的应用。
它可以用来实现电力设备之间的同步运行,比如同步发电机、同步电机等。
感应同步器可以通过感应信号来调节电力设备的输出功率、频率等参数,从而实现电力系统的平稳运行。
3. 交通信号控制感应同步器在交通信号控制中也得到了广泛的应用。
它可以通过感应信号来实现交通信号的同步调节,比如红绿灯的变化、道路标志的显示等。
感应同步器可以根据交通信号的变化来实现交通的有序进行,提高交通的效率和安全性。
4. 机器人控制感应同步器在机器人控制中也起到重要作用。
它可以通过感应信号来控制机器人的运动、动作等。
感应同步器可以根据感应信号的变化来实现机器人的同步操作,从而实现复杂的机器人控制任务。
感应电机和同步电机的工作原理
感应电机和同步电机的工作原理感应电机是利用定子电流在定子绕组中产生磁场,然后与转子磁场相互作用来产生转矩的电机。
其工作原理如下:1. 当感应电机通电时,通过定子绕组流过的电流在定子中产生磁场。
2. 定子磁场会感应出转子中感应电流,使转子产生磁场。
3. 定子磁场和转子磁场相互作用,产生转矩,使转子开始旋转。
4. 由于转子旋转产生感应电动势,根据法拉第定律,感应电动势会引起逆电流流过定子绕组,抵消掉原来的电流,从而减小磁场的产生。
5. 逆电流的引入会减小转矩,使转速降低。
6. 当转速降低到一定程度时,反向的电流会引起正向磁场再次产生,从而增加转矩,使转子重新加速。
7. 不断地调节电流的方向和大小,使转速保持稳定。
而同步电机是利用定子和转子之间的同步旋转来产生转矩的电机。
其工作原理如下:1. 当同步电机通电时,通过定子绕组流过的电流在定子中产生磁场。
2. 定子磁场会感应出转子中感应电流,使转子产生磁场。
3. 定子磁场和转子磁场相互作用,产生转矩,使转子开始旋转。
4. 由于定子磁场和转子磁场的相互作用,使得定子和转子之间始终保持同步旋转的状态。
5. 转子的旋转会产生感应电动势,根据法拉第定律,感应电动势会引起逆电流流过定子绕组,抵消掉原来的电流,从而减小磁场的产生。
6. 逆电流的引入会减小转矩,使转速降低。
7. 当转速降低到一定程度时,反向的电流会引起正向磁场再次产生,从而增加转矩,使转子重新加速。
8. 不断地调节电流的方向和大小,使转速保持稳定。
总体来说,感应电机和同步电机的工作原理基本相同,都是通过定子和转子之间的磁场相互作用产生转矩,使转子旋转。
不同之处在于感应电机是利用感应电动势来引起逆电流,从而调节磁场产生转矩,而同步电机则通过定子和转子之间始终保持同步旋转来产生转矩。
旋转变压器和感应同步器
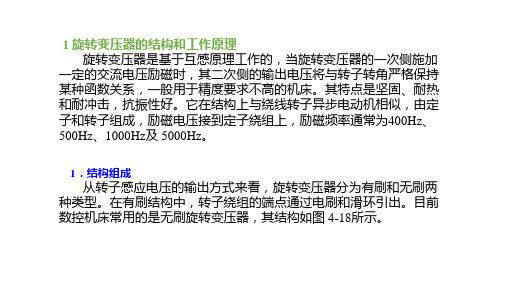
图4-19 正、余弦旋转变压器原理图
1) 鉴相型工作方式 定子的正、余弦绕组分别通入同幅、同频,但相位差为π/2的交流励 磁电压,即
Us=Um sinωt
Uc= Umsin(ωt+ π/2)=Um cosωt 当转子正转时这两个励磁电压在转子绕组中产生了感应电压,经叠 加,在转子中的感应电压为
U 2 U s sin U c cos U 2 KU m sin t sin KU m cost cos
2) 鉴幅型工作方式 给定子的正、余弦绕组分别通以同频率、同相位,但幅值分别按正 弦、余弦规律变化的交流励磁电压,即
Us= Um sinαsinωt Uc= Um cosαsinωt Um sinα、Um cosα分别为励磁电压的幅值 式中:α-给定电气转角。
当转子正转时,由于Us、Uc 的共同作用,经叠加,在转子上的感应电压为
根据励磁绕组中励磁方式的不 鉴相型工作方式 给滑尺的正弦励磁绕组和余弦励磁绕组分别通以频率相同、幅值
相同,但相位差为π/2的励磁电压,即
Us= Um sinωt Uc= Umsin(ωt+ π/2)=Um cosωt
励磁信号将在空间产生一个以ω为频率移动的行波。磁场切割定尺 绕组,并在定尺绕组中感应出电势,该电势随着定尺与滑尺相对位置 的不同而产生超前或滞后的相位差θ。按照叠加原理可以直接求出感应 电势
U2= KUmcos(α-θ)sinωt 同理,转子反转时,可得
(4-8)
U2=KUmcos(α+θ)sinωt
(4-9)
式(4-8)、(4-9)中,kUmcos(α-θ)、 kUmcos(α+θ)为感应电压的幅值。
由式式(4-8)、(4-9)可以看出,转子感应电压的幅值随转子的偏转角θ而变化,
感应同步器的工作原理
感应同步器的工作原理
感应同步器的工作原理基于感应电流的产生和磁场的作用。
当感应同步器靠近或移动到一个磁场中时,磁场会产生感应电流,然后感应电流会在感应同步器中产生一定的电流。
这种电流可以用来控制其他设备的运行,如电动机的转速等。
感应同步器通常由线圈和一个磁场生成器组成。
磁场生成器产生磁场,而线圈则位于磁场中。
当磁场生成器产生磁场时,线圈中的电流会发生变化,从而产生感应电流。
感应电流的大小和方向取决于磁场的强度和方向以及线圈的特性。
感应同步器利用感应电流的产生来实现同步。
当感应同步器靠近一个旋转的磁场时,感应电流的大小和方向会随着磁场的变化而变化。
这样,感应同步器中的电流也会随之变化。
通过测量感应同步器中的电流变化,可以确定旋转磁场的速度和方向。
感应同步器常用于测量旋转部件的转速和方向,如发电机和传动装置。
它们也可以用于控制电动机的转速和方向。
通过感应同步器,可以实现系统的同步运行,提高效率并确保设备正常运行。
总体而言,感应同步器的工作原理是基于感应电流的产生和磁场的作用,通过测量感应电流的变化来实现同步运行和控制。
3.16.4同步感应器

2)鉴幅式 在鉴幅型系统中,激磁电压是频率、相位相同, 在鉴幅型系统中,激磁电压是频率、相位相同,幅值不 成正余弦关系)的交变电压: 同(分别与位移相位角θ1成正余弦关系)的交变电压: Us= -Um Sinθ1Sinωt Uc = Um Cosθ1Sinωt 正弦绕组单独供电时 Us= Um Sinθ1Sinωt Uc = 0 当滑尺移动时,定尺上的感应电压U 随滑尺移动距离x 当滑尺移动时,定尺上的感应电压U0随滑尺移动距离x 相应的位移角θ 而变化。 (相应的位移角θ)而变化。设滑尺正弦绕组与定尺绕 组重合时x=0( θ=0),若滑尺从x=0开始移动 ),若滑尺从 开始移动, 组重合时x=0(即θ=0),若滑尺从x=0开始移动,则 在定尺上的感应电压为 U/0=KUmSinθ1SinωtCosθ inωtC
1)鉴相式: )鉴相式: 在这种工作方式下,给滑尺的 绕组和 绕组和cos绕组 在这种工作方式下,给滑尺的sin绕组和 绕组 分别通上幅值、频率相同而相位差为900的交流 分别通上幅值、频率相同而相位差为 电压: 电压:
Us= Um sinωt Uc = Um cosωt
励磁信号将在空间产生一个以ω频率移动的行波。 励磁信号将在空间产生一个以ω频率移动的行波。 磁场切割定尺导片,并在其中感应出电动势,该电动 磁场切割定尺导片,并在其中感应出电动势, 势随着定尺与滑尺位置的不同而产生超前或滞后的相位 差θ。 。
若在滑尺的余弦绕组中通以交流励磁电压, 若在滑尺的余弦绕组中通以交流励磁电压,也能得出定 尺绕组感应电压与两尺相对位移的关系曲线, 尺绕组感应电压与两尺相对位移的关系曲线,它们之间为 正弦函数关系(图中 图中OP)。 正弦函数关系 图中 。 若滑尺上的正、余弦绕组同时励磁, 若滑尺上的正、余弦绕组同时励磁,就可以分辨出感应 电压值所对应的唯一确定的位移。 电压值所对应的唯一确定的位移。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
感应同步器工作原理
感应同步器的工作原理是通过感应电磁场来驱动同步器的同步装置。
当感应同步器与感应电源连接时,电磁场由感应电源产生,并通过感应器的线圈或电枢产生极化电流。
极化电流的方向和电磁场的方向相一致,从而产生一个力矩效应,使同步器的转子与感应器的转子同步运动。
具体来说,在感应同步器的转子上,有一个磁场固定子和一个感应器转子。
感应器转子的线圈被连接到感应电源上,形成感应电磁场。
感应电磁场的变化会导致线圈中产生电流,进而产生一种力矩,推动转子运动。
当感应同步器与外部旋转装置相连时,外部旋转装置会带动感应同步器的转子旋转。
当外部旋转装置的转速改变时,感应同步器的转速也随之改变。
感应同步器的工作原理可以用Lenz定律解释。
根据Lenz定律,感应电流所产生的磁场方向与引起感应电流的变化方向相反,从而导致转子产生的力矩与外部旋转装置的转动方向相反。
总而言之,感应同步器的工作原理是通过感应电磁场来驱动同步装置,使转子与外部旋转装置保持同步运动。