GPS基本原理 Trimble 天宝 RTK
天宝4800GPSrtk工作原理
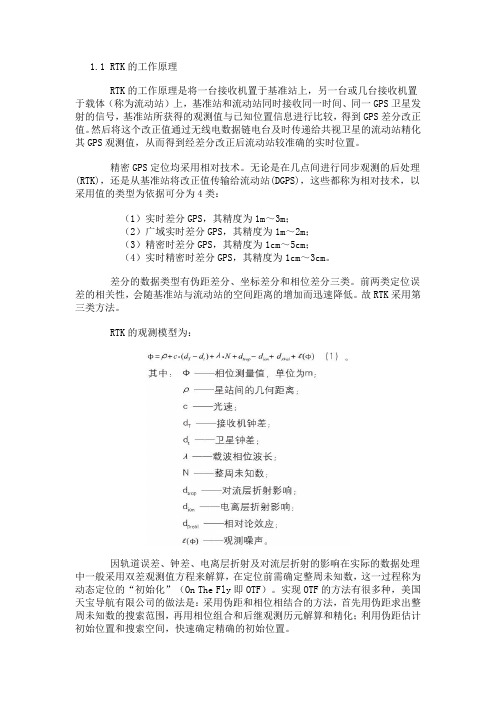
RTK的工作原理是将一台接收机置于基准站上,另一台或几台接收机置于载体(称为流动站)上,基准站和流动站同时接收同一时间、同一GPS卫星发射的信号,基准站所获得的观测值与已知位置信息进行比较,得到GPS差分改正值。
然后将这个改正值通过无线电数据链电台及时传递给共视卫星的流动站精化其GPS观测值,从而得到经差分改正后流动站较准确的实时位置。
精密GPS定位均采用相对技术。
无论是在几点间进行同步观测的后处理(RTK),还是从基准站将改正值传输给流动站(DGPS),这些都称为相对技术,以采用值的类型为依据可分为4类:(1)实时差分GPS,其精度为1m~3m;(2)广域实时差分GPS,其精度为1m~2m;(3)精密时差分GPS,其精度为1cm~5cm;(4)实时精密时差分GPS,其精度为1cm~3cm。
差分的数据类型有伪距差分、坐标差分和相位差分三类。
前两类定位误差的相关性,会随基准站与流动站的空间距离的增加而迅速降低。
故RTK采用第三类方法。
RTK的观测模型为:因轨道误差、钟差、电离层折射及对流层折射的影响在实际的数据处理中一般采用双差观测值方程来解算,在定位前需确定整周未知数,这一过程称为动态定位的“初始化”(On The Fly即OTF)。
实现OTF的方法有很多种,美国天宝导航有限公司的做法是:采用伪距和相位相结合的方法,首先用伪距求出整周未知数的搜索范围,再用相位组合和后继观测历元解算和精化;利用伪距估计初始位置和搜索空间,快速确定精确的初始位置。
我们以美国天宝导航有限公司生产的4800GPS双频接收机为例介绍RTK系统组成。
天宝RTK系统由两部分组成,如图1所示。
图1 天宝RTK系统组成二、RTK系统基准站的组成和作用RTK系统基准站由基准站GPS接收机及卫星接收天线、无线电数据链电台及发射天线、直流电源等组成,如图2所示。
RTK系统基准站的作用是求出GPS实时相位差分改正值,然后将改正值通过数传电台及时传递给流动站以精化其GPS观测值,进而得到更为精确的实时位置信息。
rtk的工作原理
rtk的工作原理RTK技术是一种用于精确测量和定位的方法,通过运用了卫星导航系统(例如GPS系统)和地面基站的组合,可以提供更精确的定位结果。
RTK的工作原理如下:1. GPS基本原理:GPS系统由一组卫星组成,这些卫星分布在地球的轨道上。
每颗卫星都发射出由精确时间标记的无线信号,接收器可以通过测量信号传播时间和卫星位置来计算自身的位置。
2. 单点定位:在传统GPS测量中,接收器可以通过衡量与至少4颗卫星的信号传播时间来确定一个大致的位置,这被称为单点定位。
然而,由于信号传输中可能发生的误差和干扰,这种方法精度有限。
3. RTK原理:RTK主要通过差分测量来提高定位精度。
差分测量是指将接收器所接收到的卫星信号和基站测量到的同一组卫星信号进行比对,从而消除信号传输误差。
4. 基站和移动接收器:RTK系统需要至少一个基站和一个移动接收器。
基站是一个已知准确位置的GPS接收器,它将接收到的卫星信号和测量数据传输到移动接收器上。
5. 相位差分测量:在RTK系统中,移动接收器通过测量接收到的卫星信号与基站接收到的信号之间的相位差异来计算定位误差。
这些相位差异与信号传输路径上的误差相关联。
6. 快速更新:RTK系统通过快速地更新相位差分测量结果来实现实时的定位,通常在每秒更新多次。
这样,移动接收器可以准确地确定自身的位置。
7. 解决模糊度:由于信号传输路径上可能存在多个相位差异,移动接收器需要解决这些模糊度。
通过使用先验信息和数学算法,RTK系统可以解决这些模糊度,并且提供更加精确的定位结果。
综上所述,RTK技术通过差分测量和相位差异的计算,能够提供更加精确的定位结果。
它的工作原理基于GPS系统和基站的组合,通过实时更新和解决模糊度,实现了高精度的定位。
阐述GPS—RTK技术的原理
阐述GPS—RTK技术的原理一、前言随着科学技术的迅猛前进,各种技术应用于道路工程建设,实现了道路工程建设的现代化和科学化。
道路工程建设的施工工期较短,工程内容复杂繁多,道路线形更是复杂多变,导致道路工程的测量困难重重。
GPS-RTK技术是现代化测量技术的一种手段,利用这种技术很好的打破了传统测量方法的局限性,并且融合了长线程测量、高精确度测量等特点,满足道路工程建设现代化要求,给道路工程建设注入新鲜活力,在未来道路工程发展中的优势不可限量。
二、GPS-RTK技术的基本原理及优点1、GPS-RTK技术的基本原理GPS是全球定位系统的英文首字母缩写,技术原理是利用卫星上的无线电发射台和无线电测距,前者形成一个卫星导航定位提醒,后者交会确定卫星空间(一般三颗以上),最后将某个物体的位置精准确定。
RKT测量技术即为动态定位系统,基本组成一个基准站和多个流动站,主要借助无线电数据传输,基准点选取点位精度相对较高的首级控制点(处在地势较高处,视野开阔,GPS卫星连续不断变化的位置,然后通过基准站为坐标、载波观测数据还有伪距观测值等借助无线电数据传输链来更好的将信息发送给每个流动站),流动站上设置接收器(参考站),便可以连续的对卫星进行动态监测,通过无线点传输设备对受基准站数据进行定位,再链接上计算机,从计算机显示器中便可以看到该流动站的具体测量精度和精度三维图。
GPS-RTK技术(GPS-real time kinematic)也就是实时动态GPS测量技术,测量依据主要是载波相位方法,同时结合载波相位测量和数据传输技术,十分适用于这种实时差分GPS测量技术,具有明显的作用,是GPS 测量技术发展中的重要技术突破之一,其研究意义和价值不言而喻。
2、RTK测量技术在道路工程测量中的优点首先,测量作业效率可以得到有效提高,通常情况下,常见的地形地势下,借助于高质量的RTK设站,附近4 km半径内的测量工作可以一次性完成,传统竣工测量需要的控制点数以及仪器搬运次数可以得到有效减少,并且一名工作人员就可以完成全部的测量工作,只需要几秒钟就可以获得坐标,那么就有较快的测量工作速度,测量的劳动强度可以得到较大程度的降低,进而实现测量效率得到提高的目的。
GPS定位基本原理

GPS定位基本原理GPS(全球定位系统)是一种利用地球上的卫星网络进行定位的技术。
它能够提供高精度的位置信息,并广泛应用于导航、地图、车辆追踪等领域。
本文将介绍GPS定位的基本原理。
一、GPS系统概述GPS系统由一组卫星、地面控制站和接收设备组成。
现代化的GPS 系统通常由24颗工作卫星和3颗备用卫星组成,这些卫星分布在地球低轨道上。
地面控制站负责维护卫星轨道和时间同步,并向卫星发送指令。
二、GPS定位原理GPS定位的基本原理是通过测量卫星与接收设备之间的信号传播时间来计算准确的位置。
GPS接收设备内置有多个接收天线,用于接收来自卫星的导航信号。
1. 三角测量原理GPS定位利用了三角测量原理。
当接收设备接收到至少4颗以上的卫星信号后,就可以通过测量信号传输时间来计算卫星与接收设备之间的距离。
接收设备根据这些距离信息,利用三角测量原理计算出自身的准确位置。
2. 卫星钟同步GPS定位还需要考虑卫星和接收设备之间的时间同步问题。
卫星内置高精度的原子钟用于发送导航信号,并提供时间信息。
接收设备通过测量信号传播的时间差,校正卫星和自身设备之间的时间差,以确保定位的准确性。
3. 误差校正GPS定位还需要考虑各种误差对定位结果的影响,并进行相应的校正。
常见的误差包括大气延迟、钟差误差和多径效应等。
大气延迟是由于卫星信号穿过大气层而引起的延迟;钟差误差是卫星和接收设备内部时钟不完全同步所导致的误差;多径效应则是由于信号在传播过程中被建筑物、地形等物体反射而引起的误差。
通过采用差分定位、精密码和半载波技术等手段,可以对这些误差进行校正,提高定位的准确性。
4. 差分定位技术差分定位是一种通过参考站和接收站之间的距离差异进行差分计算来提高定位精度的技术。
参考站会测量准确的位置,并将数据通过无线电信号传输给接收设备进行差分计算。
差分定位可以有效降低多种误差的影响,提高定位的准确性。
三、GPS定位的应用GPS定位技术已广泛应用于各个领域。
天宝(Trimble)静态培训教程

地坐标)通过某种数学变换映射到平面上,这种变换又称为投影变换。投影 变换的方法有很多,如 UTM 投影、Lambuda 投影等,在我国采用的是高斯-克 吕格投影,也称为高斯投影。 (2) GPS 测量中常用的坐标系统 ①WGS-84 坐标系
② 卫星星历误差:卫星星历是 GPS 卫星定位中的重要数据。卫星星历是由地面 监控站跟踪监测 GPS 卫星测定的。由于地面监控站测试的误差以及卫星在空 中运行受到多种摄动力影响,地面监测站难以充分可靠地测定这些作用力的 影响,使得测定的卫星轨道会有误差。
5
③ 卫星钟差:卫星钟差是 GPS 卫星上所安装的原子钟的钟面时与 GPS 标准时间 之间会有偏差和漂移,并且随着时间的推移而发生变化。而 GPS 定位所需要 的观测量都是以精密测时为依据,卫星钟差会对伪码测距和载波相位测量产 生误差。当卫星钟差总量达到 1ms 时,产生的等效距离误差可达 300KM
卫星的轨道参数、卫星钟改正数和其它一些系统参数。用户一般 需要利用此导航信息来计算某一时刻 GPS 卫星在地球轨道上的位 置,导航信息也被称为广播星历。
4、GPS 误差
利用 GPS 定位时,GPS 卫星播发的信号受各种因素影响,使得测量结果 产生误差,精度下降。影响 GPS 定位精度的因素可分为下列几个方面:
(3) 精确的时间 ①GPS 工作卫星都安设有 4 台原子钟,一般是两台铷原子钟和两台铯原子钟。 ②GPS 接收机则装一个普通的石英钟,用接收 4 个卫星来消除时钟误差。 ③卫星和接收机的时钟都正确(无误差),那么 4 个卫星的测量结果应穿过同
9
一个点。 ④若卫星和接收机时钟存在误差时,测量结果无法相交于一个点时,接收机的处
Trimble自动驾驶系统的工作原理
Trimble自动驾驶系统的工作原理Trimble自动驾驶系统的组成及工作原理Trimble的autopilot自动导航驾驶系统通过高精度的GPS+GLONASS卫星定位系统,通过控制拖拉机的转向液压系统,使拖拉机按照设定的路线(直线或曲线)自动行驶,不需驾驶员操作方向盘。
在保证农机直线行驶的同时,结合线之间的偏差可以控制在2.5厘米以内,充分解决拖拉机作业过程中重叠或遗漏的问题,降低生产成本,提高土地利用效率。
Trimble自动驾驶系统的组成Trimble自动驾驶系统主要可分为两部分:RTK基站部分和拖拉机车载部分。
RTK基站部分主要包括:AG432接收机:接收卫星信号,并实时输出高精度的CMR+差分数据到服务器。
服务器;通过Internet网络接受通信模块的通讯请求,建立连接后实时向通信模块输出高精度的CMR+差分数据。
拖拉机车载部分主要包括;天线:接收卫星信号。
通信模块:接收服务器输出的高精度差分信号。
EZ-GUIDE500:实时处理天线接收到的卫星信号和通信模块接收到的差分信号,解算出±2.5厘米的高精度坐标,并将高精度坐标数据传输给NAV2 控制器。
方向传感器:实时感应拖拉机的转向方向和转向角度的大小。
液压阀:实时接收NAV2 控制器发出的控制信号,并将控制信号转换为液压油信号,实时控制液压油的流量和流向,从而控制拖拉机的转向。
NAV2 控制器:实时接收方向传感器的转向信号和光靶的位置信号,依据自身独有的T3补偿技术,向液压阀发出拖拉机的实时转向命令。
Trimble 自动驾驶系统的工作原理在EZ-GUIDE500上设定拖拉机的行走路线,设置导航模式(直线或者曲线)。
EZ-GUIDE500实时接收RTK 基站差分数据和卫星信号,实现厘米级别的RTK 卫星定位,实时向控制器发送精确的定位信息。
方向传感器实时向控制器发送车轮的运动方向。
NV A2控制器根据卫星定位的坐标及车轮的转动情况,实时向液压控制阀发送指令,通过控制液压系统油量的流量和流向,控制车辆的行驶,确保车辆按照预先设定的路线行驶。
rtk基本工作原理

rtk基本工作原理RTK基本工作原理RTK(Real-Time Kinematic)全称实时差分全站仪,是一种高精度的测量技术,可以用于测量和定位。
它是利用GPS(全球定位系统)卫星信号进行测量和定位的一种方法。
RTK技术通过对接收到的GPS信号进行差分处理,提高了测量的精度和实时性。
RTK的基本工作原理如下:1. GPS信号接收:RTK系统首先通过天线接收到GPS卫星发射的信号。
GPS卫星在空间中分布,通过接收多颗卫星发射的信号,可以确定接收器所在位置的坐标。
2. 载波相位观测:接收到GPS信号后,RTK系统会对信号进行载波相位观测。
这是一种测量方法,通过测量信号的相位变化来计算接收器到卫星的距离。
3. 差分处理:RTK系统中通常会配备两个接收器,一个称为基准站,另一个称为移动站。
基准站通过接收GPS信号并进行载波相位观测,得到高精度的位置信息;移动站也进行相同的观测。
4. 数据传输:基准站将观测到的载波相位数据传输给移动站。
这种数据传输可以通过无线电波或者互联网进行。
5. 相位差分计算:移动站接收到基准站传输的数据后,将其与自身观测到的载波相位数据进行比较,计算出两个观测站之间的相位差分。
6. 定位计算:通过测量两个站点之间的相位差分,RTK系统可以计算出移动站相对于基准站的精确位置。
7. 实时更新:RTK系统会持续进行测量和计算,实时更新移动站的位置信息。
这样,移动站就可以实时获取到高精度的定位结果。
RTK技术的优势在于其高精度和实时性。
相比传统的GPS测量方法,RTK技术能够提供更加准确的测量结果,并且可以实时获得位置信息。
这使得RTK在土地测量、建筑工程、导航和无人驾驶等领域得到广泛应用。
需要注意的是,RTK技术的精度和可靠性受到多种因素的影响,如大气条件、周围环境、接收器性能等。
在使用RTK技术进行测量时,需要根据具体情况进行合理的设置和校正,以保证测量结果的准确性。
RTK基本工作原理是通过接收GPS信号、载波相位观测、差分处理、数据传输、相位差分计算和定位计算等步骤来实现高精度的测量和定位。
GPS导航定位技术的基本原理与使用方法

GPS导航定位技术的基本原理与使用方法GPS(全球定位系统)导航定位技术已经在我们的生活中得到广泛应用。
不论是出门旅行还是日常工作中,我们都离不开GPS导航。
它准确快捷的定位系统为我们提供了丰富的导航信息,使我们的出行更加便利。
那么,GPS导航的基本原理是什么呢?我们又该如何使用呢?本文将详细介绍GPS导航定位技术的基本原理和使用方法。
首先,我们来了解GPS导航定位技术的基本原理。
GPS系统由一组卫星和接收器组成。
这些卫星围绕地球轨道上空运行,将信号发送到地面接收器。
接收器接收到至少3颗卫星发出的信号后,通过计算信号的传播时间来确定自身位置。
由于每颗卫星都具有精确的时钟,接收器能够根据不同卫星信号的到达时间来计算距离,并进行三角定位,确定位置。
GPS导航定位技术的使用方法也十分简单。
我们只需要一个支持GPS导航的设备,如手机、汽车导航仪或手持导航仪。
打开设备上的GPS功能,它会搜索到附近的卫星信号。
一旦接收到卫星信号,设备将开始计算并显示所在位置的经纬度坐标。
我们可以根据设备上的导航界面,输入目的地的地址或坐标,GPS导航系统将自动规划最佳路线,并提供语音或图形导航指引。
在导航过程中,我们可以看到当前位置、目的地距离、到达时间等实时信息,以及道路交通状况等辅助信息。
除了基本的导航功能,GPS导航定位技术还有许多实用的功能。
其中之一是追踪功能。
通过设备上的追踪功能,我们可以实时跟踪和记录我们的行程。
无论是徒步旅行、骑车运动还是驾车出行,我们都可以通过设备记录下行进路径和速度等信息,方便我们回顾和分享。
另外,GPS导航还可以为我们提供附近的兴趣点信息,如餐厅、加油站、银行等,方便我们在陌生的地方找到需要的服务。
这些附加功能为GPS导航系统增添了更多的实用性和乐趣。
尽管GPS导航定位技术给我们的生活带来了便利,但它也有一些局限性。
首先,GPS导航需要接收到至少3颗卫星信号才能准确定位,所以在一些高楼大厦密集的城市或山区峡谷等信号较弱的地方,GPS导航的精度可能会下降。
GPSRTK定位技术的原理与应用
GPSRTK定位技术的原理与应用导语:随着科技的不断发展,全球定位系统(GPS)在各行各业中的应用越来越广泛。
而GPSRTK定位技术则是在实时动态环境下提供高精度测量的一种重要手段。
本文将探讨GPSRTK定位技术的原理与应用,并分析其在建筑、农业、测绘和地理信息等领域中的优势。
一、原理解析GPSRTK定位技术是Real Time Kinematic的缩写,即实时动态差分定位技术。
核心原理是通过将基准站的精密测量结果与流动设备测量结果进行相对比较,从而实现高精度的定位。
其主要依赖于以下关键技术:1.卫星信号接收:在GPSRTK定位技术中,首要任务是获取卫星信号。
接收器需要同时接收4颗或更多的卫星信号,并利用这些信号进行计算。
2.基准站:GPSRTK系统需要设置一个基准站,基准站的位置应该已知且稳定。
基准站用于接收卫星信号,并通过测量其到达时间差来确定信号的传播速度和卫星位置。
3.流动设备:流动设备是需要进行定位的目标,它通过接收卫星信号来测量自身的位置。
4.差分实时定位:GPSRTK定位技术中的差分就是通过将基准站的准确经纬度等信息与流动设备的测量结果进行比较来消除误差。
这样,即使是在精确度较低的设备上,也能够实现高精度的定位。
二、应用场景GPSRTK定位技术在多个行业中都有广泛的应用,下面将重点介绍其在建筑、农业、测绘和地理信息等领域中的应用。
1.建筑领域:在建筑领域中,GPSRTK定位技术可以用于土地测量和建筑物定位。
通过在基准站上测量经纬度等数据,并与流动设备进行差分运算,可以实现高精度的建筑物定位。
这对于大型建筑工程的位置控制和土地规划非常重要。
2.农业领域:在农业领域中,GPSRTK定位技术可以用于土地测量、种植管理和农机作业。
农民可以利用该技术准确测量农田的大小和形状,从而更好地规划作物的种植。
此外,通过将GPSRTK技术与农机结合,农民可以精确控制农机的行驶路径,提高耕作效率。
3.测绘领域:在测绘领域中,GPSRTK定位技术为制图师提供了高精度的地理信息。
GPS_RTK测量方式及其原理

GPS_RTK测量方式及其原理GPS_RTK(Real-Time Kinematic)是一种实时动态定位技术,它通过接收卫星信号,同时使用基准站和移动站的数据进行数据处理,从而实现高精度的测量结果。
GPS_RTK在土地测量、建筑施工和导航等领域应用广泛。
1.单站RTK测量:单站RTK测量是指只使用一个移动站,通过与基准站接收的GPS信号进行差分处理,从而得到高精度测量结果。
这种方式适用于需要实时获取位置信息的应用场景,如导航和车辆跟踪等。
单站RTK测量的原理是基于GPS系统的差分定位技术。
移动站接收到的卫星信号与基准站接收到的卫星信号之间存在误差,这些误差包括卫星轨道误差、大气延迟和钟差等。
通过基准站和移动站之间的无线通信,基准站将接收到的卫星信号数据经过差分处理后发送给移动站,移动站利用这些差分数据对自身接收到的卫星信号数据进行修正,进而得到高精度的测量结果。
2.无站RTK测量:无站RTK测量是指利用多个移动站和一个或多个基准站同时进行测量,从而实现相对静态或时变的高精度定位。
无站RTK测量适用于需要精确掌握多个测点的相对位置关系的应用场景,如地形测量和建筑施工。
无站RTK测量的原理是通过多个移动站和一个或多个基准站之间的差分定位技术。
基准站接收到的卫星信号数据经过差分处理后发送给所有的移动站,移动站利用这些差分数据进行位置计算,从而得到相对静态或时变的高精度定位结果。
移动站之间可以通过无线通信交换差分数据,提高整个测量系统的灵活性和可靠性。
3.网络RTK测量:网络RTK测量是指利用一个或多个基准站和一个或多个移动站进行测量,通过互联网连接不同位置的基准站和移动站,实现高精度定位和数据传输。
网络RTK测量适用于需要在大范围内进行测量的应用场景,如道路巡航和城市规划等。
网络RTK测量的原理是基于无线通信和互联网技术,将不同位置的基准站和移动站进行连接。
基准站接收到的卫星信号数据经过差分处理后发送给互联网上的服务器,移动站通过互联网连接到服务器,接收服务器发送的差分数据进行定位计算,从而实现高精度测量。
gps基本工作原理

gps基本工作原理
GPS全称为全球定位系统(Global Positioning System),是一
种基于卫星导航的定位技术。
它利用一组分布在地球轨道中的人造卫星,通过接收到卫星发射的无线电信号来确定接收器的准确位置和时间信息。
GPS的基本工作原理是三角定位,它依靠接收来自至少四颗
卫星的信号,并将这些信号与接收器内部的精确时钟进行比较,从而计算出接收器与每颗卫星之间的距离。
通过测量多颗卫星的距离,并利用三角测量原理,就能确定接收器的准确位置。
具体的工作原理如下:首先,GPS接收器接收到至少四颗卫
星发射的信号,这些信号包含着卫星的精确时间信息。
接收器内部的精确时钟会记录接收到信号的时间差,以及每个卫星的位置信息。
然后,接收器通过将信号的时间差与卫星位置信息结合起来,利用三角测量原理计算出接收器与每个卫星之间的距离。
这些距离是以卫星为中心的球体上的测量值。
最后,GPS接收器使用所测量出的多个卫星距离信息,通过
三角测量原理计算出接收器的准确位置。
通过同时测量至少四颗卫星的距离,可以准确计算出接收器的经度、纬度和海拔高度。
需要注意的是,GPS的工作原理基于信号的传播速度,因此
接收器与卫星的直线距离不是由GPS直接测量得到的,而是
通过测量信号的传播时间与速度进行计算得来。
总的来说,GPS利用卫星信号进行三角定位,通过测量接收器与多颗卫星之间的距离,从而确定接收器的准确位置和时间信息。
这个基本工作原理使得GPS成为了现代导航、定位和导航服务等领域中不可或缺的技术。
CORS介绍天宝GPS单基站天宝VRS网络RTK
CORS技术简介连续运行参考站系统(Continuous Operational Reference System,简称CORS系统)可以定义为一个或若干个固定的、连续运行的GPS/GNSS参考站,利用现代计算机、数据通信和互联网(LAN/WAN)技术组成的网络,实时地向不同类型、不同需求、不同层次的用户提供经过检验的不同类型的GPS观测值(载波相位,伪距),各种改正数、状态信息,以及其他有关GPS服务项目的系统。
它是目前GPS测量技术发展的一个方向,是网络RTK技术和GPS 主板技术的发展的产物,它的产生弥补了一些传统的RTK的不足,促进了GPS在测量和其他领域的应用。
CORS技术在用途上可以分成单基站CORS、多基站CORS和网络CORS。
一、单基站CORS和多基站CORS单基站CORS:就是只有一个连续运行站。
类似于一加一或一加多的RTK,只不过基准站由一个连续运行的基站代替,基站同时又是一个服务器,通过软件实时查看卫星状态、存储静态数据、实时向Internet发送差分信息以及监控移动站作业情况。
移动站通过GPRS\CDMA 网络通讯和基站服务器通讯。
多基站CORS:就是分布在一定区域内的多个单基站联合作业,基站与基站之间的距离不超过50公里,他们都将数据发送到一个服务器。
流动站作业时,只要发送它的位置信息到服务器,系统自动计算流动站与各个基站之间的距离,将距离近的基站差分数据发送给流动站。
这样就确保了流动站在多基站CORS覆盖区域移动作业时,系统总能够提供离距流动站最近的基站差分数据已达到最佳的测量精度间。
单基站CORS和多基站CORS解决了传统RTK作业中①用户需要架设本地的参考站,且架设参考站时含有潜在的粗差②没有数据完整性的监控③需要人员留守看护基准站,生产效率低④通讯不便⑤电源供给不便等问题1.1、单基站CORS作业原理基准站连续不间断的观测GPS的卫星信号获取该地区和该时间段的“局域精密星历”及其他改正参数,按照用户要求把静态数据打包存储并把基准站的卫星信息送往服务器上Eagle软件的指定位置。
Trimble自动驾驶系统的工作原理
Trimble自动驾驶系统的工作原理Trimble自动驾驶系统的组成及工作原理Trimble的autopilot自动导航驾驶系统通过高精度的GPS+GLONASS卫星定位系统,通过控制拖拉机的转向液压系统,使拖拉机按照设定的路线(直线或曲线)自动行驶,不需驾驶员操作方向盘。
在保证农机直线行驶的同时,结合线之间的偏差可以控制在2.5厘米以内,充分解决拖拉机作业过程中重叠或遗漏的问题,降低生产成本,提高土地利用效率。
Trimble自动驾驶系统的组成Trimble自动驾驶系统主要可分为两部分:RTK基站部分和拖拉机车载部分。
RTK基站部分主要包括:AG432接收机:接收卫星信号,并实时输出高精度的CMR+差分数据到服务器。
服务器;通过Internet网络接受通信模块的通讯请求,建立连接后实时向通信模块输出高精度的CMR+差分数据。
拖拉机车载部分主要包括;天线:接收卫星信号。
通信模块:接收服务器输出的高精度差分信号。
EZ-GUIDE500:实时处理天线接收到的卫星信号和通信模块接收到的差分信号,解算出±2.5厘米的高精度坐标,并将高精度坐标数据传输给NAV2 控制器。
方向传感器:实时感应拖拉机的转向方向和转向角度的大小。
液压阀:实时接收NAV2 控制器发出的控制信号,并将控制信号转换为液压油信号,实时控制液压油的流量和流向,从而控制拖拉机的转向。
NAV2 控制器:实时接收方向传感器的转向信号和光靶的位置信号,依据自身独有的T3补偿技术,向液压阀发出拖拉机的实时转向命令。
Trimble 自动驾驶系统的工作原理在EZ-GUIDE500上设定拖拉机的行走路线,设置导航模式(直线或者曲线)。
EZ-GUIDE500实时接收RTK 基站差分数据和卫星信号,实现厘米级别的RTK 卫星定位,实时向控制器发送精确的定位信息。
方向传感器实时向控制器发送车轮的运动方向。
NV A2控制器根据卫星定位的坐标及车轮的转动情况,实时向液压控制阀发送指令,通过控制液压系统油量的流量和流向,控制车辆的行驶,确保车辆按照预先设定的路线行驶。
天宝GPS-RTK接收机使用说明
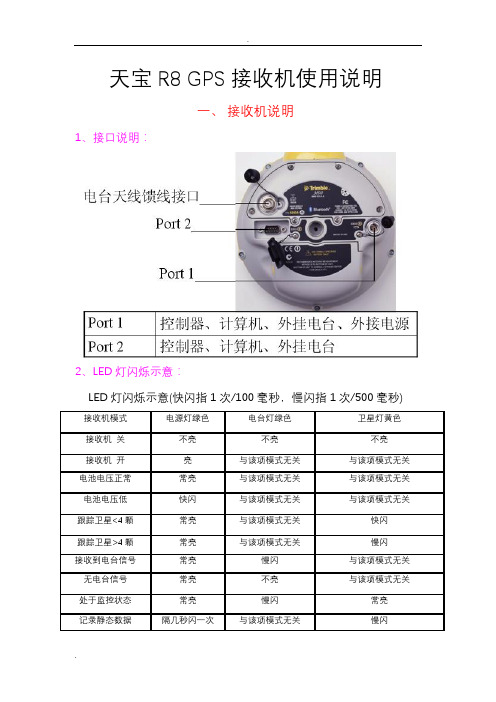
天宝R8 GPS接收机使用说明一、接收机说明1、接口说明:2、LED灯闪烁示意:LED灯闪烁示意(快闪指1次/100毫秒,慢闪指1次/500毫秒)3、按钮说明二、配置蓝牙(TSC2手簿)1 配置蓝牙(TSC2手簿)在下面的图形界面选择Menu-Buletooth Settings:(也可以进入start-)此界面的选项解释:此界面的选项解释:Turn on Buletooth:打开蓝牙功能Make this device discoverable to other devices:使这个设备可以被别的设备发现,意思是通过蓝牙搜索,别的设备也可以搜索到本设备。
不选择则禁止了此设备被搜到,但可以搜索别的蓝牙设备。
本例以搜索蓝牙手机为例说明搜索匹配过程,请首先打开手机的蓝牙接收功能,再打开手机的GPRS 连接功能(均手机上操作)。
选择Devices 标签:可以看到里面已经搜索到的其它设备,如果想新建蓝牙匹配设备,点击New Partnership…搜索到以后会出现此列表框里。
(搜索过程中必须打开手机的可接收蓝牙搜索功能!)选择搜索到的新设备,例如搜索到的手机为T68,名称显示出来了,点击Next提示输入验证码,以进行匹配,输入例如8888 四个数字此时手机上会提示输入识别码,也输入8888 四个数字,确定如果是搜索Trimble 设备,不需要密码验证,如果搜索手机等蓝牙设备,需要先后在手簿和手机输入相同的验证密码,并且在手机上加手簿为匹配装置。
最后点击OK 接受并且关闭窗口。
手机上会提示把搜索设备(这里指的是TSC2 手簿)接受或者添加到匹配单等信息,选择添加到匹配单(不同手机提示可能不一样)匹配完毕,点击OK,退出匹配界面。
3、设置与仪器连接点配置-控制器-蓝牙选择接收机S/N号三、任务及坐标系统1.控制器开机按下键盘绿色键(为开/关机键):其首先进入WINCE界面,在桌面上运行Survey Controller 程序,进入Survery Controller 主菜单2.建立任务(此步基准站与流动站都需做)在主菜单中选择“文件”进入子菜单,显示如下:以建新任务为例,点击新建任务,显示如下图所示:若是龙泉区内的一般工程,直接打开龙泉坝区文件\山区文件,点击“任务”-“新建任务”,输入任务名称如:20121212LC,点击接受即可。
GPS_RTK测量方式及其原理
GPS_RTK测量方式及其原理GPS作为一项现代空间定位技术已被广泛应用在越来越多的行业领域,取代的是传统和常规的光学或电子测量仪器。
而从20世纪80年代以后,GPS卫星导航定位技术实现了与现代通信技术完美地结合,可以说是现代空间定位技术走出了具有革命意义的突破,从而更进一步拓展了GPS空间定位技术的应用范围与作用。
以GPS-RTK测量为例,主要分析GPS-RTK的测量方式及其原理,对于指导实际工作有一定的意义。
1、GPS-RTK测量的工作原理全球卫星定位系统(GlobalPositioning System,简称“GPS”)是美国在20世纪70年代就开始研制,并主要希望用于军事部门的新一代卫星导航与定位系统,经历20年和耗资200多亿美元,分为三个阶段研发,于1994年底全面完成初建并被陆续投入使用。
全球卫星定位系统是基于空间无线电波传输的卫星导航定位系统,其系统具有全能性、全球性、全天候、连续性和即时性的精密三维导航及空间定位功能,同时拥有良好地抗干扰性和信息保密性。
因此,全球卫星空间定位技术被率先在大地测量、工程测量、航空摄影测量和海洋测量和城市测量等测绘领域普及应用,同时逐步外延至军事、交通、通信、资源和管理等领域展开了大力研究并拓展应用。
全球卫星空间定位技术的定位功能是依仗测量中的距离交会定点工作原理予以实现。
如果假设在待测点Q处设置一部GPS接收机,而在某一时刻tk同时可以接收到三颗(或三颗以上)卫星S1、S2、S3所发送的电波信号。
然后通过后期数据处理与计算,可以求解得到该时刻该GPS接收机天线中心(测站点)至空间卫星的距离ρ1、ρ2、ρ3。
根据空间卫星星历可以查询到该时刻三颗卫星的空间三维坐标(Xj,Yj,Zj),j=1,2,3,从而由公式求解得出Q点的空间三维坐标(X,Y,Z),完成初步测量,最后由修正得到结果。
GPS-RTK测量技术是以载波相位观测量作为基础的实时差分GPS定位测量技术,它能够实时获得待测站点在指定空间坐标系中的三维坐标,精确度可以达到厘米级。
GPS基本原理_Trimble_天宝_RTK
二、GPS 发展历史
1、导航发展历史 • 天文导航 • 无线电导航系统 ●罗兰-C(Loran-C) ●奥米茄( Omega ) ●多普勒(Doppler)系统 • 卫星定位系统 ●NNSS 子午仪系统 ●GPS
2、TRANSIT 子午导航卫星系统 • 64 年投入使用,系统由 6 颗卫星组成,轨道倾角 90 度,间隔 1.5 小时定位一次,观 测 8 分钟,二维位置精度优于 40 米。 • 采用多普勒卫星定位 • 每天至多 16 小时工作时 • 观测 3 天才达亚米级精度 - 涵盖全球 - 经度/纬度/高度 应用: 潜艇,船舶导航;大地测量,石油物探,地球监测,高精度授时等领域。 3、GPS 建设过程 GPS 实施计划共分三个阶段: 第一阶段为方案论证和初步设计阶段。从 1973 年到 1979 年,共发射了 4 颗试验卫星。 研制了地面接收机及建立地面跟踪网。 第二阶段为全面研制和试验阶段。从 1979 年到 1984 年,又陆续发射了 7 颗试验卫星, 研制了各种用途接收机。实验表明,GPS 定位精度远远超过设计标准。 第三阶段为实用组网阶段。1989 年 2 月 4 日第一颗 GPS 工作卫星发射成功,表明 GPS 系统进入工程建设阶段。1993 年底实用的 GPS 网即(21+3)GPS 星座已经建成,之后根据 计划更换失效的卫星。 4、GPS 的未来-GPS 现代化 从 2000 年 5 月 2 日起,停止实施“SA”政策,使 GPS 非授权用户稳定在 30M 的单点定 位精度。 增加 L2C(PRN17、PRN32) 。 在 GPS 新型工作卫星 Block II F 上增设第三频率 L5(1176.45MHz)形成 L1、L2、L5 三频 信号共同工作。 BLOCK Ⅲ的发射,GPS III 计划除了继承 GPS 更新计划外,重点是放弃现有 24 颗中高轨 道(MEO)卫星星座方案,采用全新的 33 颗 HEO+GEO 卫星星座(HEO 为高椭圆倾角轨 道, GEO 为在赤道上空的静止卫星) , 除采用更稳定的频标和提高信号可靠性等措施外, GPS III 卫星将采用新的 M 码以增强保密和抗干扰功能。GPSIII 预计在 2015~2020 年投 入运行,计划将对军用平台提供 25 年的卫星导航服务 5、GLONASS 系统 GLONASS 是 Global Navigation Satellite System(全球导航卫星系统)的字头缩写,是前苏联 从 80 年代初开始建设的与美国 GPS 系统相类似的卫星定位系统,也由卫星星座、地面监测 控制站和用户设备三部分组成。现在由俄罗斯空间局管理。 GLONASS 系统的卫星星座由 24 颗卫星组成,均匀分布在 3 个近圆形的轨道平面上,每 个轨道面 8 颗卫星,轨道高度 19100 公里,运行周期 11 小时 15 分,轨道倾角 64.8°。 与美国的 GPS 系统不同的是 GLONASS 系统采用频分多址(FDMA)方式,根据载波频率来 区分不同卫星(GPS 是码分多址(CDMA) ,根据调制码来区分卫星) 。每颗 GLONASS 卫星发 播的两种载波的频率分别为 L1=1,602+0.5625k(MHz)和 L2=1,246+0.4375k(MHz), 其中 k=1~24 为每颗卫星的频率编号。 GLONASS 卫星的载波上也调制了两种伪随机噪声码:S 码和 P 码。 GLONASS 系统从理论上有 24 颗卫星,但由于卫星使用寿命和资金紧张等问题,实际上
Trimble GPS原理培训教材
北京54坐标系
1954年北京坐标系是我国目前广泛采用的大地测量坐标系。 该坐标系源自于原苏联采用过的1942年普尔科夫坐标系。 建国前,我国没有统一的大地坐标系统,建国初期,在苏联 专家的建议下,我国根据当时的具体情况,建立起了全国统 一的1954年北京坐标系。该坐标系采用的参考椭球是克拉索 夫斯基椭球,该椭球的参数为:
各个载波上的加载信号
L2C码
未来的L5载波
4、GPS误差
利用GPS定位时,GPS卫星播发的信号受各种因素影响,使得 测量结果产生误差,精度下降。影响GPS定位精度的因素可分 为下列几个方面: a)与GPS卫星有关的因素 b)与信号传播途径有关的因素 c)与接收机本身有关的因素 d)其他方面的因素
GPS的空间部分由24颗GPS工作卫星所组成,这些GPS 工作卫星共同组成了GPS卫星星座,其中21颗为用于导航的 卫星,3颗为活动备用卫星。这24颗卫星分布在6个倾角为 55°,高度约为20000公里的高空轨道上绕地球运行。卫星的 运行周期约为12恒星时。完整的工作卫星星座保证在全球各 地可以随时观测到4-8颗高度角为15°以上的卫星,若高度角在 5°则可达到12颗卫星。每颗GPS工作卫星都发出用于导航定 位的信号。GPS用户正是利用这些信号来进行工作。
3、GPS信号
卫星信息包括三种信号分量:载波、测距码和数据码。 载波采用两个频率发送:fL1=1575.42MHz,fL2=1227.6MHz。 测距码分为粗码C/A码和精码,分别提供给民间用户和军方用 户,都采用伪随机码。 数据码的内容包括遥测码、转换码和三个数据块,数据块中 含标志码、卫星时钟改正系数、卫星星历以及其他卫星的概 略情况等。
c)与接收机本身有关的因素
①接收机钟差: 接收机石英钟与卫星的原子钟钟面时间的误差。 ②接收机天线相位中心偏差: GPS接收机天线的标称相位中心 与其真实的相位中心之间的差异。 ③接收机软件和硬件造成的误差:在进行GPS定位时,定位结 果还会受到诸如处理与控制软件和硬件等的影响。
关于天宝R8-RTK及VRS测量简明教程
一、RTK〔Real - time kinematic〕实时动态差分法。
RTK定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并到达厘米级精度。
在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。
流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果。
只要能保持四颗以上卫星相位观测值的跟踪和必要的几何图形,那么流动站可随时给出厘米级定位结果。
二、VRS( Virtua Reference Station )技术原理该项技术〔网络RTK作业模式〕是由美国的天宝公司研制。
首先在一定区域内架设一定数量的基准站,基站接收卫星信号,然后将信息传送至信息处理中心,移动站先将接收机的位置信息发送到数据处理中心,数据处理中心会根据移动站的位置,选择附近几个位置比较好的基准站信息,“虚拟〞出一个参考站,然后,将虚拟出的参考站改正数据播发给移动站,这个虚拟参考站的位置通常是在移动站周围5千米范围内,但是实际情况中,一般是几米之内,通过这项技术所获得的数据误差就减小了很多。
RTK测量1、Trimble R8 RTK测量、新建任务或者翻开已存在任务新建任务:在主菜单中选择“文件〞进入子菜单,显示如下:以建新任务为例,点击新建任务,显示输入任务名称:选择坐标系统对于坐标系统的选择,一般选“无投影/无基准〞,然后做点校正。
翻开任务:在主菜单中选择“文件〞进入子菜单,选择翻开任务即可翻开之前存在的工程任务。
2、配置基准站及流动站〔假设非首次配置可跳过此步骤〕此方法为使得手簿搜索添加蓝牙设备〔如电台或者蓝牙设备〕。
翻开主界面,选择配置→蓝牙,进入蓝牙配置列表,点击配置→进入手簿蓝牙配置→根据需要勾选选项,切换标签至devices.点击New Partnership搜索蓝牙设备。
浅谈Trimble_RTK_GPS中的点校正
浅谈Trimble RTK GPS 中的点校正【摘要】在RTK 测量中GPS 接收机获取WGS84坐标,通过定义的坐标系统将WGS84坐标转换为测量所需要的当地地方坐标,但是通常当地的地方坐标系统的投影和基准转换参数并不知道,为了使WGS84坐标转换为当地的地方坐标,需通过点校正的方式求出坐标系统的转换参数。
【关键词】GPS ;RTK ;点校正;Trimble一、概述GPS (Global Positioning System )即全球定位系统,是由美国建立的一个卫星导航定位系统,利用该系统,用户可以在全球范围内实现全天候、连续、实时的三维导航定位和测速;另外,利用该系统,用户还能够进行高精度的时间传递和高精度的精密定位。
测量的基本任务就是确定物体在空间中的位置。
而对空间位置的描述则是建立在某一个特定的空间框架上的。
所谓空间框架就是我们常说的坐标系统。
一个完整的坐标系统是由坐标系和基准两方面要素所构成的。
坐标系指的是描述空间位置的表达形式,而基准指的是指为确定点在空间中的位置而采用的地球椭球或参考椭球的几何参数和物理参数,及其在空间的定位、定向方式,以及在描述空间位置时所采用的单位长度的定义。
在GPS 测量中,经常要进行坐标系变换与基准变换。
所谓坐标系变换就是在不同的坐标表示形式间进行变换,基准变换是指在不同的参考基准间进行变换。
不同坐标系统的转换本质上是不同基准间的转换,不同基准间的转换方法有很多,其中,最为常用的有三参数转换法、七参数转换法。
三参数指三个平移参数,七参数指三个平移参数、三个旋转参数和一个尺度参数。
二、GPS 测量中常用的坐标系统1.WGS-84坐标系统WGS-84坐标系是目前GPS 所采用的坐标系统,GPS 所发布的星历参数就是基于此坐标系统的。
WGS-84坐标系统的全称是World Geodical System-84(世界大地坐标系-84),它是一个地心地固坐标系统。
WGS-84坐标系的坐标原点位于地球的质心,Z 轴指向BIH1984.0定义的协议地球极方向,X 轴指向BIH1984.0的启始子午面和赤道的交点,Y 轴与X 轴和Z 轴构成右手系。
最新GPS定位及RTK原理
G P S定位及R T K原理------------------------------------------作者xxxx------------------------------------------日期xxxxGPS定位全球定位系统GPS(Global Positioning System)是美国陆海空三军联合研制的卫星导航系统,具有全球性、全天候、连续性、实时性导航定位和定时功能,能为各类用户提供精密的三维坐标、速度和时间。
它由空间部分(GPS卫星星座)、地面控制部分(地面监控系统)、用户设备部分(GPS信号接收机)三个部分组成。
在GPS观测中,我们测出卫星到接收机的距离,利用三维坐标中的距离公式,利用3颗卫星,就可以组成3个方程式,解出观测点的位置(X,Y,Z)三个未知数。
考虑到卫星时钟与接收机时钟之间的误差,实际上有4个未知数,X、Y、Z和钟差,因此,需要引入第四颗卫星,形成四个方程式进行求解,从而可以确定某一观测点的空间位置,精确算出该点的经纬度和高程。
单点导航定位与相对测地定位是GPS应用的两个方面;对常规测量而言相对测地定位是主要的应用方式。
相对测地定位是利用L1和L2载波相位观测值实现高精度测量,其原理是采用载波相位测量局域差分法:在接收机之间求一次差,在接收机和卫星观测历元之间求二次差,通过两次差分计算解算出待定基线的长度;求解整周模糊度是其关键技术,根据算法模型,设计了静态、快速静态以及RTK等作业模式。
静态作业模式主要用于地壳变形观测、国家大地测量、大坝变形观测等高精度测量;快速静态测量以其高效的作业效率与厘米级精度广泛应用于一般的工程测量;而RTK测量以其快速实时,厘米级精度等特点广泛应用于数据采集(如碎部测量)与工程放样中。
RTK技术代表着GPS相对测地定位应用的主流。
RTK的原理RTK是以载波相位观测量为根据的实时差分GPS测量,它能够实时地提供测站点在指定坐标系中的厘米级精度的三维定位结果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、GPS 发展历史
1、导航发展历史 • 天文导航 • 无线电导航系统 ●罗兰-C(Loran-C) ●奥米茄( Omega ) ●多普勒(Doppler)系统 • 卫星定位系统 ●NNSS 子午仪系统 ●GPS
2、TRANSIT 子午导航卫星系统 • 1964 年投入使用,系统由 6 颗卫星组成,轨道倾角 90 度,间隔 1.5 小时定位一次,观 测 8 分钟,二维位置精度优于 40 米。 • 采用多普勒卫星定位 • 每天至多 16 小时工作时 • 观测 3 天才达亚米级精度 - 涵盖全球 - 经度/纬度/高度 应用: 潜艇,船舶导航;大地测量,石油物探,地球监测,高精度授时等领域。 3、GPS 建设过程 GPS 实施计划共分三个阶段: 第一阶段为方案论证和初步设计阶段。从 1973 年到 1979 年,共发射了 4 颗试验卫星。 研制了地面接收机及建立地面跟踪网。 第二阶段为全面研制和试验阶段。从 1979 年到 1984 年,又陆续发射了 7 颗试验卫星, 研制了各种用途接收机。实验表明,GPS 定位精度远远超过设计标准。 第三阶段为实用组网阶段。1989 年 2 月 4 日第一颗 GPS 工作卫星发射成功,表明 GPS 系统进入工程建设阶段。1993 年底实用的 GPS 网即(21+3)GPS 星座已经建成,之后根据 计划更换失效的卫星。 4、GPS 的未来-GPS 现代化 从 2000 年 5 月 2 日起,停止实施“SA”政策,使 GPS 非授权用户稳定在 30M 的单点定 位精度。 增加 L2C(PRN17、PRN32) 。 在 GPS 新型工作卫星 Block II F 上增设第三频率 L5(1176.45MHz)形成 L1、L2、L5 三频 信号共同工作。 BLOCK Ⅲ的发射,GPS III 计划除了继承 GPS 更新计划外,重点是放弃现有 24 颗中高轨 道(MEO)卫星星座方案,采用全新的 33 颗 HEO+GEO 卫星星座(HEO 为高椭圆倾角轨 道, GEO 为在赤道上空的静止卫星) , 除采用更稳定的频标和提高信号可靠性等措施外, GPS III 卫星将采用新的 M 码以增强保密和抗干扰功能。GPSIII 预计在 2015~2020 年投 入运行,计划将对军用平台提供 25 年的卫星导航服务 5、GLONASS 系统 GLONASS 是 Global Navigation Satellite System(全球导航卫星系统)的字头缩写,是前苏联 从 80 年代初开始建设的与美国 GPS 系统相类似的卫星定位系统,也由卫星星座、地面监测 控制站和用户设备三部分组成。现在由俄罗斯空间局管理。 GLONASS 系统的卫星星座由 24 颗卫星组成,均匀分布在 3 个近圆形的轨道平面上,每 个轨道面 8 颗卫星,轨道高度 19100 公里,运行周期 11 小时 15 分,轨道倾角 64.8°。 与美国的 GPS 系统不同的是 GLONASS 系统采用频分多址(FDMA)方式,根据载波频率来 区分不同卫星(GPS 是码分多址(CDMA) ,根据调制码来区分卫星) 。每颗 GLONASS 卫星发 播的两种载波的频率分别为 L1=1,602+0.5625k(MHz)和 L2=1,246+0.4375k(MHz), 其中 k=1~24 为每颗卫星的频率编号。 GLONASS 卫星的载波上也调制了两种伪随机噪声码:S 码和 P 码。 GLONASS 系统从理论上有 24 颗卫星,但由于卫星使用寿命和资金紧张等问题,实际上
三、GPS 系统组成
GPS 系统的组成 GPS 由三个独立的部分组成: 1、空间部分:30 颗卫星。 2、地面控制系统:1 个主控站,3 个注入站,5 个监测站。 3、用户设备部分:接收 GPS 卫星发射信号,以获得必要的导航和定位信息,经数据 处理,完成导航和定位工作。GPS 接收机硬件一般由主机、天线和电源组成。 1、空间部分-GPS 星座 1)系统组成 • GPS 的空间部分是由 24 颗 GPS 工作卫星所组成的。 • 24 颗卫星分布在 6 个倾角为 55°的近圆轨道上绕地球运行,轨道间交角 60°。卫星 距地面 20200km。 • 卫星的运行周期约为 12 恒星时,人们每天提前 4 分钟见到同一颗卫星。
• 目前可用的卫星通常有 30 颗之多。 • 20200km 轨道高度(地面高度) • 11h58m(恒星时)轨道周期 • 5 个多小时出现在地平线以上(每颗星) 2)GPS 卫星的作用 • 向用户连续不断地发送导航定位信号,并用导航电文报告自己的位置以及其它在轨 卫星的位置 • 接收地面注入站发送到卫星的导航电文和其它信息,并通过 GPS 信号发送给用户 • 接收地面主控站发送到卫星的调度指令。 2、地面控制系统 • GPS 的控制部分由分布在全球的由若干个跟踪站所组成。分为主控站、监控站和注 入站。主控站位于美国克罗拉多 Colorado 的法尔孔 Falcon 空军基地。它的作用是 根据各监控站根据 GPS 的观测数据,计算出卫星的星历和卫星钟的改正参数等,并 将这些数据通过注入站注入到卫星中去。同时它还对卫星进行控制,向卫星发布指 令,当工作卫星出现故障时调度备用卫星替代失效的工作卫星工作。主控站也具有 监控站的功能。 • 监控站有五个。除了主控站外其它四个分别位于夏威夷 (Hawaii) 、 阿松森群岛 (Ascencion)、 迭哥伽西亚(Diego Garcia)、 卡瓦加兰(Kwajalein)。 监控站的作用是接 收卫星信号、监测卫星的工作状态。 • 注入站有三个。分别位于阿松森群岛、 迭哥伽西亚、卡瓦加兰。 注入站的作用是 将主控站计算出的卫星星历和卫星钟的改正数等注入到卫星中去。
目前只有 17 颗。 GLONASS 系统单点定位精度水平方向为 16m,垂直方向为 25m。
6、Galileo(加俐略)系统 2002 年 3 月 26 日,欧盟 15 个成员国的交通部长在布鲁塞尔决定开始启动伽利略卫星 导航定位系统计划。 该计划基于如下三点考虑:①政治和军事上。目前的 GPS 系统在全世界各个领域的广 泛应用,使得各国在技术、市场、军事等方面对美国有过多依赖,欧盟要想独立成为多边世 界的一极,实现欧洲自主防务,必须打破这种依赖;②技术上。欧盟意识到卫星导航在未来 的应用会更加广泛而普及, 然而目前这种技术由美国和俄罗斯的军方控制, 要想在巨大的市 场中为欧洲的高科技产业界创造机会, 为他们进入这一市场提供了关键技术的平台必须打破 技术垄断,而作为一项基础设施,首先要建立一套卫星导航系统;③安全上。由军方控制的 GPS 和 GLONASS 系统,一般用户只能获得定位服务,信号的安全性和连续性都是没有保证 的,一旦信号错误或者信号被关闭,对用户造成的影响是难以估计的,有的甚至危及生命安 全。 Galileo 系统并不是重复 GPS 或者是 GLONASS 系统,它由民间组织控制,保证服务的连 续性和完好性;系统本身提供了比“定位”更多的服务,侧重于导航,卫星的覆盖度更高, 定位精度更高(更好的星座设计) ,提供系统完备性参数和系统错误警告等信息;和 GPS、 GLONASS 系统兼容,为用户提供多样的服务。 系统组成: • ①卫星星座:由 3 个独立的圆形轨道,30 颗 GNSS 卫星组成(27 颗工作卫星,3 颗 备用卫星) 。卫星的轨道倾角 i =56°;卫星的公转周期 T=14h23m14S 恒星时;轨道 高度 H=23616km 。 • ②地面系统:在欧洲建立 2 个控制中心;在全球构建监控网。