(完整版)MATLAB中英文对照
matlab 汉字 二进制编码
matlab 汉字二进制编码MATLAB是一种广泛应用于科学和工程计算的编程语言和环境。
它提供了丰富的功能和工具,可以用于各种数值计算、数据分析、图像处理、算法开发和模拟实验等应用领域。
其中,汉字的处理问题一直是MATLAB用户关注的一个重要方面之一。
本文将介绍MATLAB中汉字的二进制编码方式及其应用。
在MATLAB中,汉字的二进制编码方式主要有两种:Unicode编码和GBK编码。
Unicode编码是一种国际化的标准字符编码,包含了全世界几乎所有的字符,包括汉字。
而GBK编码是中文信息处理的标准,它将汉字分成了不同的区,每个区有若干个位面,每个位面又包含了若干个码位,每个码位对应一个字符。
在MATLAB中,可以使用内置的函数将汉字转换为二进制编码。
下面是一个示例,展示了如何将汉字 "你好" 转换为二进制编码:```matlabstr = '你好';unicode = unicode2native(str, 'UTF-8');gbk = unicode2native(str, 'GBK');```在上述示例中,变量 `str` 是一个包含汉字的字符串,`unicode` 是将汉字转换为UTF-8编码的结果,`gbk` 是将汉字转换为GBK编码的结果。
可以通过查看变量的值来获取对应的二进制编码。
对于每种编码方式,都有对应的解码函数可以将二进制编码转换为汉字。
例如,将UTF-8编码转换为汉字的示例如下:```matlabunicode = [228 189 160 229 165 189]; % UTF-8编码str = native2unicode(unicode, 'UTF-8');disp(str);```在上述示例中,变量 `unicode` 是一个包含UTF-8编码的二进制数组,`str` 是将UTF-8编码转换为汉字的结果。
matlab中plot含义

matlab中plot含义(中英文版)In MATLAB, the `plot` function is used to create 2-D line plots of data.The basic syntax of the function is:```matlabplot(x, y)```Here, `x` and `y` are arrays or matrices representing the x-axis and y-axis data points, respectively.The `plot` function will connect these points with lines.在MATLAB 中,`plot` 函数用于创建二维线图数据。
该函数的基本语法是:```matlabplot(x, y)```这里,`x` 和`y` 是数组或矩阵,分别代表x 轴和y 轴的数据点。
`plot` 函数将这些点用线连接起来。
Additionally, the `plot` function allows for various options to customize the appearance of the plot.For example, you can add a title, labels for the axes, and even customize the line style, color, and marker symbol.此外,`plot` 函数允许各种选项来自定义图表的外观。
例如,您可以添加一个标题,为坐标轴添加标签,甚至可以自定义线条样式,颜色和标记符号。
另外,`plot` 函数还有一些其他功能,比如绘制散点图、条形图、饼图等。
例如,要绘制一个散点图,可以使用以下语法:```matlabscatter(x, y)```这里,`x` 和`y` 分别代表x 轴和y 轴的数据点,`scatter` 函数将在这些点上绘制小标记。
Matlab工具箱中英文对照
Matlab2010工具箱中英文对照matlab distributed computing server 分布式计算服务器simulink 仿真aerospace blockset 航天模块集aerospace toolbox 航天工具箱bioinformatics toolbox 生物信息学工具箱communications blockset 通信模块集communications toolbox 通信工具箱control system toolbox 控制系统工具箱curve fitting toolbox 曲线拟合工具箱data acquisition toolbox 数据采集工作箱database toolbox 数据库工作箱data feed toolbox 数据传送工具箱DO qualification kit 鉴定工具包Econometrics toolbox 计量经济学工具箱EDA simulator link 电子设计自动化模拟器连接Embedded IDE link 嵌入式集成电路设备连接Filter design HDL coder 滤波器设计HDL编码器Filter design toolbox 滤波器设计工具箱Financial derivatives toolbox 金融衍生工具箱Financial toolbox 财经工具箱Fixed-income toolbox 固定输入工具箱Fixed-point toolbox 定点工具箱Fuzzy logic toolbox 模糊逻辑工具箱Gauges blockset 仪表工具箱Global optimization toolbox全域最佳化IEC certification kit 组织认定工具包Image acquisition toolbox 图像采集工具箱Image processing toolbox 图像处理工具箱Instrument control toolbox仪器控制工具箱Mapping toolbox 地图工具箱Matlab builder EX excel的matlab生成器Matlab builder JA java的matlab生成器Matlab builder NE net的matlab生成器Matlab compiler matlab编译器Matlab report generator matlab报告生成器Model predictive control toolbox 模型预测控制工具箱Model –based calibration toolbox 模型校正工具箱Neural network toolbox 神经网络工具箱OPC toolbox OPC工具箱Optimization toolbox 优化工具箱Parallel computing toolbox 并行计算工具箱Partial differential equation toolbox 偏微分方程工具箱Real-time windows target 实时windows目标Real-time workshop embedded coder 实时工作空间内置编码器RF toolbox RF工具箱Robust control toolbox 鲁棒控制工具箱Signal processing blockset 型号处理模块集Signal processing toolbox 型号处理工具箱Simbiology 仿真生物Simdriveline 仿真驱动链接Simelectronics 仿真电子学Simevents 仿真事件Simhydraulic 仿真液压Simmechanics 仿真力学Simpowersystem 仿真动力系统SimRF 仿真RFSimscape 仿真场景Simulink 3D animation 3D动画仿真Simulink control design 控制设计仿真Simulink design optimization 设计优化仿真Simulink design verifier 设计校正仿真Simulink fixed point 定点仿真Simulink HDL coder HDL编码器仿真Simulink PLC coder PLC编码器仿真Simulink report generator 报告生成器仿真Simulink verification and validation 仿真检验与确认Spreadsheet link EX excel电子表格连接State flow 状态流State flow coder 状态流编码器Statistics toolbox 统计工具箱Symbolic math toolbox 符号数学工具箱System identification toolbox 系统识别工具箱System test 系统测试Target support package 目标支持工具包Vehicle network toolbox 运载网络工具箱Video and image processing blockset 视频和图像处理模块集Wavelet toolbox 小波工具箱xPC target xPC目标xPC target embedded option xPC目标嵌入选择。
matlab的常用指令及其含义
matlab的常用指令及其含义1、清除命令窗口clc2、清除变量clear3、清除figureclf4、生成一个图层figure()figure(1)figure('name','实例')gwin=figure('MenuBar','none','NumberTitle','off','Name','菜单创建演示','Position',[(rect(3)-N)/2,(rect(4)-N)/2,N,N],'Resize','off','Color','red');5、打印disp(a)fprintf('the value of pi is%6.2f\n',pi)6、字符串和数字转换str2num(123)num2str('123')7、取整函数floor(2.3)==2 %为向下取整ceil(2.3)==3 %为向上取整round(2.3)==2 %为取最接近的整数fix(-3.5)==-3 %为向0取整8、复数运算temp = complex(1,2) %构造函数,==2+5ireal(temp) == 1 %返回实部imag(temp)==5 %返回虚部abs(temp)==5.3852 %返回模conj(temp)==2-5i %返回共轭复数9、快速生成矩阵A=zeros(5) %5行5列的0矩阵B=ones(5) %5行5列的1矩阵A=zeros(m,n) %m行n列0矩阵B=ones(m,n) %m行n列1矩阵A=eye(5) %5行5列的单位矩阵B=rand(3,5) %3行5列的0~1之间的随机矩阵A=magic(5) %5行5列的魔方矩阵,注意这里行和列必须相同10、生成随机矩阵rand(1,5) %生成一个1行5列的矩阵,即行向量11、求最大值max12、数据库结果转矩阵data_mat = cell2mat(data_cell);data_cell是数据库返回的结果,data_mat是矩阵13、求转置矩阵a=[1; 2; 3];b=a.'; %点+单引号b->{1 2 3}14、打印时间disp(datestr(datetime('now')));15、将矩阵转化为列向量,即列矩阵B=A(:); %A是矩阵16、读取矩阵取前N行或N列A(1:2,:) %读取矩阵A的1~2行A(:,1:3) %读取矩阵A的1~3列17、矩阵运算(加、减、乘、除、点乘、点除等)(1)A+B; 表示矩阵A和矩阵B相加(各个元素对应相加);(2)A-B; 表示矩阵A和矩阵B相减(各个元素对应相减);(3)A*B; 表示矩阵A和矩阵B相乘;(4)A.*B; 表示矩阵A和矩阵B对应元素相乘(点乘);(5)A/B; 表示矩阵A与矩阵B相除法;(6)A./B; 表示矩阵A和矩阵B对应元素相除(点除);(7)A^B; 表示矩阵A的B次幂;(8)A.^B; 表示矩阵A的每个元素的B次幂18、获取数组的行数和列数[rows,colums]=size(cell_data); %cell_data是2行3列的数组,rows==2 colums==319、获取数组的指定行和指定列first = cell_data(1,:); %第一行所有列first = cell_data(:,1); %第一列所有行。
Matlab工具箱数学词汇英汉对照表
附录Ⅱ工具箱数学词汇英汉对照表Ⅱ.1 概率论与数理统计词汇英汉对照表Aabsolute value 绝对值accept 接受acceptable region 接受域additivity 可加性adjusted 调整的alternative hypothesis 对立假设analysis 分析analysis of covariance 协方差分析analysis of variance 方差分析arithmetic mean 算术平均值association 相关性assumption 假设assumption checking 假设检验availability 有效度average 均值Bbalanced 平衡的band 带宽bar chart 条形图beta-distribution 贝塔分布between groups 组间的bias 偏倚binomial distribution 二项分布binomial test 二项检验Ccalculate 计算case 个案category 类别center of gravity 重心central tendency 中心趋势chi-square distribution 卡方分布chi-square test 卡方检验classify 分类cluster analysis 聚类分析coefficient 系数coefficient of correlation 相关系数collinearity 共线性column 列compare 比较comparison 对照components 构成,分量compound 复合的confidence interval 置信区间consistency 一致性constant 常数continuous variable 连续变量control charts 控制图correlation 相关covariance 协方差covariance matrix 协方差矩阵critical point 临界点critical value 临界值crosstab 列联表cubic 三次的,立方的cubic term 三次项cumulative distribution function 累加分布函数curve estimation 曲线估计Ddata 数据default 默认的definition 定义deleted residual 剔除残差density function 密度函数dependent variable 因变量description 描述附录II 工具箱数学词汇英汉对照表·535·design of experiment 试验设计deviations 差异df.(degree of freedom) 自由度diagnostic 诊断dimension 维discrete variable 离散变量discriminant function 判别函数discriminatory analysis 判别分析distance 距离distribution 分布D-optimal design D-优化设计Eeaqual 相等effects of interaction 交互效应efficiency 有效性eigenvalue 特征值equal size 等含量equation 方程error 误差estimate 估计estimation of parameters 参数估计estimations 估计量evaluate 衡量exact value 精确值expectation 期望expected value 期望值exponential 指数的exponential distributon 指数分布extreme value 极值Ffactor 因素,因子factor analysis 因子分析factor score 因子得分factorial designs 析因设计factorial experiment 析因试验fit 拟合fitted line 拟合线fitted value 拟合值fixed model 固定模型fixed variable 固定变量fractional factorial design 部分析因设计frequency 频数F-test F检验full factorial design 完全析因设计function 函数Ggamma distribution 伽玛分布geometric mean 几何均值group 组Hharmomic mean 调和均值heterogeneity 不齐性histogram 直方图homogeneity 齐性homogeneity of variance 方差齐性hypothesis 假设hypothesis test 假设检验Iindependence 独立independent variable 自变量independent-samples 独立样本index 指数index of correlation 相关指数interaction 交互作用interclass correlation 组内相关interval estimate 区间估计intraclass correlation 组间相关inverse 倒数的iterate 迭代Kkernal 核Kolmogorov-Smirnov test柯尔莫哥洛夫-斯米诺夫检验kurtosis 峰度MATLAB 6.1与工程数学应用指南(下册)·536·Llarge sample problem 大样本问题layer 层least-significant difference 最小显著差数least-square estimation 最小二乘估计least-square method 最小二乘法level 水平level of significance 显著性水平leverage value 中心化杠杆值life 寿命life test 寿命试验likelihood function 似然函数likelihood ratio test 似然比检验linear 线性的linear estimator 线性估计linear model 线性模型linear regression 线性回归linear relation 线性关系linear term 线性项logarithmic 对数的logarithms 对数logistic 逻辑的lost function 损失函数Mmain effect 主效应matrix 矩阵maximum 最大值maximum likelihood estimation 极大似然估计mean squared deviation(MSD) 均方差mean sum of square 均方和measure 衡量media 中位数M-estimator M估计minimum 最小值missing values 缺失值mixed model 混合模型mode 众数model 模型Monte Carle method 蒙特卡罗法moving average 移动平均值multicollinearity 多元共线性multiple comparison 多重比较multiple correlation 多重相关multiple correlation coefficient 复相关系数multiple correlation coefficient 多元相关系数multiple regression analysis 多元回归分析multiple regression equation 多元回归方程multiple response 多响应multivariate analysis 多元分析Nnegative relationship 负相关nonadditively 不可加性nonlinear 非线性nonlinear regression 非线性回归noparametric tests 非参数检验normal distribution 正态分布null hypothesis 零假设number of cases 个案数Oone-sample 单样本one-tailed test 单侧检验one-way ANOVA 单向方差分析one-way classification 单向分类optimal 优化的optimum allocation 最优配制order 排序order statistics 次序统计量origin 原点orthogonal 正交的outliers 异常值Ppaired observations 成对观测数据paired-sample 成对样本parameter 参数parameter estimation 参数估计附录II 工具箱数学词汇英汉对照表·537·partial correlation 偏相关partial correlation coefficient 偏相关系数partial regression coefficient 偏回归系数percent 百分数percentiles 百分位数pie chart 饼图point estimate 点估计poisson distribution 泊松分布polynomial curve 多项式曲线polynomial regression 多项式回归polynomials 多项式positive relationship 正相关power 幂P-P plot P-P概率图predict 预测predicted value 预测值prediction intervals 预测区间principal component analysis 主成分分析proability 概率probability density function 概率密度函数probit analysis 概率分析proportion 比例Qqadratic 二次的Q-Q plot Q-Q概率图quadratic term 二次项quality control 质量控制quantitative 数量的,度量的quartiles 四分位数Rrandom 随机的random number 随机数random number 随机数random sampling 随机取样random seed 随机数种子random variable 随机变量randomization 随机化range 极差rank 秩rank correlation 秩相关rank statistic 秩统计量regression analysis 回归分析regression coefficient 回归系数regression line 回归线reject 拒绝rejection region 拒绝域relationship 关系reliability 可靠性repeated 重复的report 报告,报表residual 残差residual sum of squares 剩余平方和response 响应risk function 风险函数robustness 稳健性root mean square 标准差row 行run 游程run test 游程检验Ssample 样本sample size 样本容量sample space 样本空间sampling 取样sampling inspection 抽样检验scatter chart 散点图S-curve S形曲线separately 单独地sets 集合sign test 符号检验significance 显著性significance level 显著性水平significance testing 显著性检验significant 显著的,有效的significant digits 有效数字skewed distribution 偏态分布skewness 偏度MATLAB 6.1与工程数学应用指南(下册)·538·small sample problem 小样本问题smooth 平滑sort 排序soruces of variation 方差来源space 空间spread 扩展square 平方standard deviation 标准离差standard error of mean 均值的标准误差standardization 标准化standardize 标准化statistic 统计量statistical quality control 统计质量控制std. residual 标准残差stepwise regression analysis 逐步回归stimulus 刺激strong assumption 强假设stud. deleted residual 学生化剔除残差stud. residual 学生化残差subsamples 次级样本sufficient statistic 充分统计量sum 和sum of squares 平方和summary 概括,综述Ttable 表t-distribution t分布test 检验test criterion 检验判据test for linearity 线性检验test of goodness of fit 拟合优度检验test of homogeneity 齐性检验test of independence 独立性检验test rules 检验法则test statistics 检验统计量testing function 检验函数time series 时间序列tolerance limits 容许限total 总共,和transformation 转换treatment 处理trimmed mean 截尾均值true value 真值t-test t检验two-tailed test 双侧检验Uunbalanced 不平衡的unbiased estimation 无偏估计unbiasedness 无偏性uniform distribution 均匀分布Vvalue of estimator 估计值variable 变量variance 方差variance components 方差分量variance ratio 方差比various 不同的vector 向量Wweight 加权,权重weighted average 加权平均值within groups 组内的ZZ score Z分数附录II 工具箱数学词汇英汉对照表·539·Ⅱ.2 最优化方法词汇英汉对照表Aactive constraint 活动约束active set method 活动集法analytic gradient 解析梯度approximate 近似arbitrary 强制性的argument 变量attainment factor 达到因子Bbandwidth 带宽be equivalent to 等价于best-fit 最佳拟合bound 边界Ccoefficient 系数complex-value 复数值component 分量constant 常数constrained 有约束的constraint 约束constraint function 约束函数continuous 连续的converge 收敛cubic polynomial interpolation method三次多项式插值法curve-fitting 曲线拟合Ddata-fitting 数据拟合default 默认的,默认的define 定义diagonal 对角的direct search method 直接搜索法direction of search 搜索方向discontinuous 不连续Eeigenvalue 特征值empty matrix 空矩阵equality 等式exceeded 溢出的Ffeasible 可行的feasible solution 可行解finite-difference 有限差分first-order 一阶GGauss-Newton method 高斯-牛顿法goal attainment problem 目标达到问题gradient 梯度gradient method 梯度法Hhandle 句柄Hessian matrix 海色矩阵Iindependent variables 独立变量inequality 不等式infeasibility 不可行性infeasible 不可行的initial feasible solution 初始可行解initialize 初始化inverse 逆invoke 激活iteration 迭代iteration 迭代MATLAB 6.1与工程数学应用指南(下册)·540·JJacobian 雅可比矩阵LLagrange multiplier 拉格朗日乘子large-scale 大型的least square 最小二乘least squares sense 最小二乘意义上的Levenberg-Marquardt method列文伯格-马夸尔特法line search 一维搜索linear 线性的linear equality constraints 线性等式约束linear programming problem 线性规划问题local solution 局部解Mmedium-scale 中型的minimize 最小化mixed quadratic and cubic polynomial interpolation and extrapolation method混合二次、三次多项式内插、外插法multiobjective 多目标的Nnonlinear 非线性的norm 范数Oobjective function 目标函数observed data 测量数据optimization routine 优化过程optimize 优化optimizer 求解器over-determined system 超定系统Pparameter 参数partial derivatives 偏导数polynomial interpolation method多项式插值法Qquadratic 二次的quadratic interpolation method 二次内插法quadratic programming 二次规划Rreal-value 实数值residuals 残差robust 稳健的robustness 稳健性,鲁棒性Sscalar 标量semi-infinitely problem 半无限问题Sequential Quadratic Programming method序列二次规划法simplex search method 单纯形法solution 解sparse matrix 稀疏矩阵sparsity pattern 稀疏模式sparsity structure 稀疏结构starting point 初始点step length 步长subspace trust region method 子空间置信域法sum-of-squares 平方和symmetric matrix 对称矩阵Ttermination message 终止信息termination tolerance 终止容限the exit condition 退出条件the method of steepest descent 最速下降法transpose 转置Uunconstrained 无约束的under-determined system 负定系统附录II 工具箱数学词汇英汉对照表·541·Vvariable 变量vector 矢量Wweighting matrix 加权矩阵Ⅱ.3 样条词汇英汉对照表Aapproximation 逼近array 数组a spline in b-form/b-spline b样条a spline of polynomial piece /ppform spline分段多项式样条Bbivariate spline function 二元样条函数break/breaks 断点Ccoefficient/coefficients 系数cubic interpolation 三次插值/三次内插cubic polynomial 三次多项式cubic smoothing spline 三次平滑样条cubic spline 三次样条cubic spline interpolation三次样条插值/三次样条内插curve 曲线Ddegree of freedom 自由度dimension 维数Eend conditions 约束条件Iinput argument 输入参数interpolation 插值/内插interval 取值区间Kknot/knots 节点Lleast-squares approximation 最小二乘拟合Mmultiplicity 重次multivariate function 多元函数Ooptional argument 可选参数order 阶次output argument 输出参数Ppoint/points 数据点Rrational spline 有理样条rounding error 舍入误差(相对误差)Sscalar 标量sequence 数列(数组)spline 样条spline approximation 样条逼近/样条拟合spline function 样条函数spline curve 样条曲线spline interpolation 样条插值/样条内插spline surface 样条曲面smoothing spline 平滑样条MATLAB 6.1与工程数学应用指南(下册)·542·T tolerance 允许精度U univariate function 一元函数V vector 向量W weight/weights 权重Ⅱ.4 偏微分方程数值解词汇英汉对照表Aabsolute error 绝对误差absolute tolerance 绝对容限adaptive mesh 适应性网格Bboundary condition 边界条件Ccontour plot 等值线图converge 收敛coordinate 坐标系Ddecomposed 分解的decomposed geometry matrix 分解几何矩阵diagonal matrix 对角矩阵Dirichlet boundary conditionsDirichlet边界条件Eeigenvalue 特征值elliptic 椭圆形的error estimate 误差估计exact solution 精确解Ggeneralized Neumann boundary condition推广的Neumann边界条件geometry 几何形状geometry description matrix 几何描述矩阵geometry matrix 几何矩阵graphical user interface(GUI)图形用户界面Hhyperbolic 双曲线的Iinitial mesh 初始网格Jjiggle 微调LLagrange multipliers 拉格朗日乘子Laplace equation 拉普拉斯方程linear interpolation 线性插值loop 循环Mmachine precision 机器精度mixed boundary condition 混合边界条件NNeuman boundary condition Neuman边界条件node point 节点nonlinear solver 非线性求解器normal vector 法向量附录II 工具箱数学词汇英汉对照表·543·PParabolic 抛物线型的partial differential equation 偏微分方程plane strain 平面应变plane stress 平面应力Poisson's equation 泊松方程polygon 多边形positive definite 正定Qquality 质量Rrefined triangular mesh 加密的三角形网格relative tolerance 相对容限relative tolerance 相对容限residual 残差residual norm 残差范数Ssingular 奇异的sparce matrix 稀疏矩阵stiffness matrix 刚度矩阵subregion 子域Ttriangular mesh 三角形网格Uundetermined 未定的uniform refinement 均匀加密uniform triangle net 均匀三角形网络Wwave equation 波动方程。
simulink中英文对照表
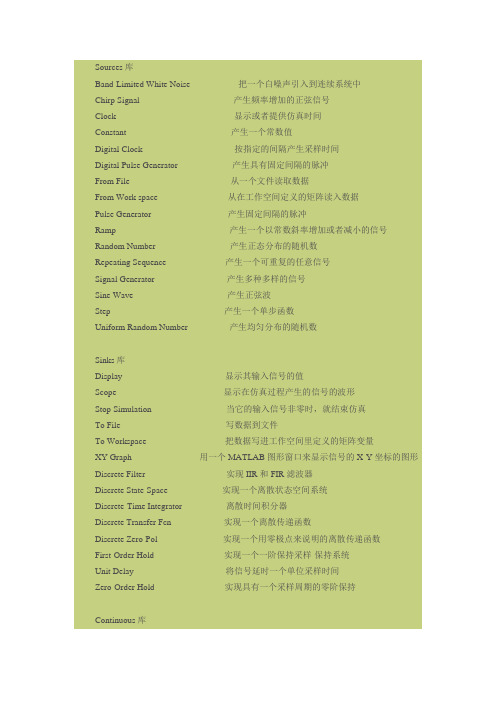
Sources库Band-Limited White Noise 把一个白噪声引入到连续系统中Chirp Signal 产生频率增加的正弦信号Clock 显示或者提供仿真时间Constant 产生一个常数值Digital Clock 按指定的间隔产生采样时间Digital Pulse Generator 产生具有固定间隔的脉冲From File 从一个文件读取数据From Work space 从在工作空间定义的矩阵读入数据Pulse Generator 产生固定间隔的脉冲Ramp 产生一个以常数斜率增加或者减小的信号Random Number 产生正态分布的随机数Repeating Sequence 产生一个可重复的任意信号Signal Generator 产生多种多样的信号Sine Wave 产生正弦波Step 产生一个单步函数Uniform Random Number 产生均匀分布的随机数Sinks库Display 显示其输入信号的值Scope 显示在仿真过程产生的信号的波形Stop Simulation 当它的输入信号非零时,就结束仿真To File 写数据到文件To Workspace 把数据写进工作空间里定义的矩阵变量XY Graph 用一个MATLAB图形窗口来显示信号的X-Y坐标的图形Discrete Filter 实现IIR和FIR滤波器Discrete State-Space 实现一个离散状态空间系统Discrete-Time Integrator 离散时间积分器Discrete Transfer Fcn 实现一个离散传递函数Discrete Zero-Pol 实现一个用零极点来说明的离散传递函数First-Order Hold 实现一个一阶保持采样-保持系统Unit Delay 将信号延时一个单位采样时间Zero-Order Hold 实现具有一个采样周期的零阶保持Continuous库Derivative 输出输入信号的微分Integrator 积分一个信号Memory 输出来自前一个时间步的模块输入State-Space 实现现行状态空间系统Transfer Fcn 实现现行传递系统Transport Delay 将输入延迟一给定的时间Variable Transport Delay 将输入延迟一可变的时间Zero-Pole 实现一个用零极点标明的传递函数Nonlinear库Abs 输出输入信号的绝对值Algebraic Constraint 将输入信号约束为零Combinatorial Logic 实现一个真值表Complex to Magnitude-Angle 输出一个复数输入信号的相角和模长Complex to Real-Imag 输出一个复数输入信号的实部和虚部Derivative 输出输入信号的时间微分Dot Product 进行点积Gain 将模块的输入信号乘上一个增益Logical Operator 在输入信号实施一个逻辑操作Magnitude-Angle to Complex 从模长和角度的输入输出一个复数信号Math Function 实现一个数学函数Matrix Gain 将输入乘上一个矩阵MinMax 输出输入信号的最小和最大值Product 输出模块的乘积或者是商Real-Imag to Complex 将输入信号作为是实部和虚部来乘复数信号输出Relational Operator 在输入上进行指定的关系运算Rounding Function 实现一个舍入函数Sign 显示输入信号的符号Slider Gain 按一条斜线来改变标量增益Sum 产生输入信号的和Trigonometric Function 实现一个三角函数Math库Fcn 将一个指定的表达式到输入信号Look-Up Table 实现输入的线性峰值匹配Look-Up Table (2-D) 实现两个信号的线性峰值匹配MATLAB Fcn 应用一个MATLAB函数或表达式到输入S-Function 访问S函数Function &Table库Backlash 对一个具有演示特性的系统进行建模Coulomb & Viscous Friction 刻画在零点的不连续性Dead Zone 提供一个零输出的区域Manual Switch 在两个信号间切换Quantizer 按指定的间隔离散化输入信号Rate Limiter 限制信号的改变速率Relay 在两个常数间切换输出Saturation 限制信号的持续时间Switch 在两个信号间切换Signal &Systems库Bus Selector 有选择的输出输入信号Configurable Subsystem 代表任何一个从指定的库中选择的模块Data Store Memory 定义一个共享的数据存储空间Data Store Read 从共享数据存储空间读数据Data Store Write 写数据到共享数据存储空间Data Type Conversion 将一个信号转换为另外一个数据类型Demux 将一个向量信号分解输出Enable 增加一个使能端到子系统中From 从一个Goto模块接收输入信号Goto 传递模块输入到From模块Goto Tag Visibility 定义一个Goto模块标记的可视视域Ground 将一个未连接的输入端接地Hit Crossing 检测过零点IC 设置一个信号的初始值Inport 为一个子系统建立一个输入端口或者建立一个外部输入端口Merge 将几个输入线合并为一个标量线Model Info 显示、修订控制模型信息Mux 将几个输入信号联合为一个向量信号Outport 为子系统建立一个输出端口,或者是建立一个外部输出端口Probe 输出输入信号的宽度、采样时间并且/或者信号类型Subsystem 表示在另一个系统之内的子系统Terminator 结束一个未连接的输出端口Trigger 增加一个出发端口到子系统Width 输出输入向量的宽度。
MATLAB2014a安装说明中英文转换
MATLAB®是一种用于数值计算、可视化及编程的高级语言和交互式环境。
使用MATLAB,可以分析数据,开发算法,创建模型和应用程序。
借助其语言、工具和内置数学函数,您可以探求多种方法,比电子表格或传统编程语言(如C/C++ 或Java™)更快地求取结果。
MATLAB 应用广泛,其中包括信号处理和通信、图像和视频处理、控制系统、测试和测量、计算金融学及计算生物学等众多应用领域。
在各行业和学术机构中,有一百多万工程师和科学家使用MATLAB 这一技术计算语言.【软件截图】Matlab R2014a【其他信息】新增功能概览R2014a ( 版本8.3) - 发行时间2014年3月7日MATLAB 产品系列MATLAB®:Raspberry Pi 和网络摄像头硬件支持包Optimization Toolbox™: 混合整数线性规划(MILP) 求解器Statistics Toolbox™: 使用每个主题的多个测量值反复测量数据建模Image Processing Toolbox™: 使用MATLAB Coder™ 为25 个函数生成C 代码,为5 个函数增加了GPU加速功能Econometrics Toolbox™: 状态空间模型、缺失数据情况下自校准的卡尔曼滤波器以及ARIMA/GARCH 模型性能增强Financial Instruments Toolbox™: 对偶曲线构建,用于计算信用敞口和敞口概况的函数,以及利率上限、利率下限和掉期期权的布莱克模型定价SimBiology®: 提供用于模型开发的模型估算和桌面增强的统一函数System Identification Toolbox™: 递归最小二乘估算器和在线模型参数估算模块MATLAB Production Server™:实现客户端与服务器之间的安全通讯以及动态请求创建Simulink 产品系列Simulink®: 用于定义和管理与模型关联的设计数据的数据字典Simulink: 用于算法分割和用于多核处理器及FPGA目标器件的单一模型工作流程Simulink:为LEGO MINDSTORMS EV3、Arduino Due 和Samsung Galaxy Android 设备提供内建支持Stateflow®: 在Stateflow 状态图中填写上下文相关的选项卡Simulink Real-Time™: 仪表板、高分辨率目标显示器和FlexRay 协议支持,以及合并了xPC Target™ 和xPC Target Embedded Option™ 的功能SimMechanics™: STEP 文件导入和接头的总约束力计算Simulink® Report Generator™: 用于在Simulink Web view视图中丰富显示内容的对象检查器和通知程序用于在MATLAB 和Simulink 中进行设计的系统工具箱(System Toolbox)Co mputer Vision System Toolbox™: 立体视觉和光学特性识别(OCR) 函数LTE System Toolbox™: 一款新产品,可用于LTE和LTE-Advanced无线通讯系统的物理层仿真代码生成和实现Embedded Coder®: 将AUTOSAR 工具的变更合并到Simulink 模型中Embedded Coder: ARM Cortex-A 使用Ne10 库优化了代码生成HDL Coder™: 支持枚举数据类型和时钟频率驱动的自动流水线操作HDL Verifier™: 使用JTAG对Altera®硬件进行FPGA在环仿真包含组件代码-----------------------------------------------------------------------------------------------MATLAB 版本: 8.3.0.532 (R2014a)MATLAB 许可证编号: 271828操作系统: Microsoft Windows 7 专业版Version 6.1 (Build 7601: Service Pack 1)Java 版本: Java 1.7.0_11-b21 with Oracle Corporation Java HotSpot(TM) 64-Bit Server VM mixed mode -----------------------------------------------------------------------------------------------MATLAB 版本8.3 (R2014a)Simulink 版本8.3 (R2014a)Aerospace Blockset 版本3.13 (R2014a)Aerospace Toolbox 版本2.13 (R2014a)Bioinformatics Toolbox 版本4.4 (R2014a)Communications System Toolbox 版本5.6 (R2014a)Computer Vision System Toolbox 版本6.0 (R2014a)Control System Toolbox 版本9.7 (R2014a)Curve Fitting Toolbox 版本3.4.1 (R2014a)DO Qualification Kit 版本2.3 (R2014a)DSP System Toolbox 版本8.6 (R2014a)Data Acquisition Toolbox 版本3.5 (R2014a)Database Toolbox 版本5.1 (R2014a)Datafeed Toolbox 版本4.7 (R2014a)Econometrics Toolbox 版本3.0 (R2014a)Embedded Coder 版本6.6 (R2014a)Filter Design HDL Coder 版本2.9.5 (R2014a) Financial Instruments Toolbox 版本1.3 (R2014a) Financial Toolbox 版本5.3 (R2014a)Fixed-Point Designer 版本4.2 (R2014a)Fuzzy Logic Toolbox 版本2.2.19 (R2014a)Global Optimization Toolbox 版本3.2.5 (R2014a) HDL Coder 版本3.4 (R2014a)HDL Verifier 版本4.4 (R2014a)IEC Certification Kit 版本3.3 (R2014a)Image Acquisition Toolbox 版本4.7 (R2014a)Image Processing Toolbox 版本9.0 (R2014a) Instrument Control Toolbox 版本3.5 (R2014a)LTE System Toolbox 版本1.1 (R2014a)MATLAB Builder EX 版本2.5 (R2014a)MATLAB Builder JA 版本2.3.1 (R2014a)MATLAB Builder NE 版本4.2.1 (R2014a)MATLAB Coder 版本2.6 (R2014a)MATLAB Compiler 版本5.1 (R2014a)MATLAB Report Generator 版本3.16 (R2014a) Mapping Toolbox 版本4.0.1 (R2014a)Model Predictive Control Toolbox 版本4.2 (R2014a) Model-Based Calibration Toolbox 版本4.7 (R2014a) Neural Network Toolbox 版本8.2 (R2014a)OPC Toolbox 版本3.3.1 (R2014a)Optimization Toolbox 版本7.0 (R2014a)Parallel Computing Toolbox 版本6.4 (R2014a) Partial Differential Equation Toolbox 版本1.4 (R2014a) Phased Array System Toolbox 版本2.2 (R2014a) Polyspace Bug Finder 版本1.1 (R2014a)Polyspace Code Prover 版本9.1 (R2014a)RF Toolbox 版本2.14 (R2014a)Real-Time Windows Target 版本4.4 (R2014a) Robust Control Toolbox 版本5.1 (R2014a)Signal Processing Toolbox 版本6.21 (R2014a) SimBiology 版本5.0 (R2014a)SimDriveline 版本2.6 (R2014a)SimElectronics 版本2.5 (R2014a)SimEvents 版本4.3.2 (R2014a)SimHydraulics 版本1.14 (R2014a)SimMechanics 版本4.4 (R2014a) SimPowerSystems 版本6.1 (R2014a)SimRF 版本4.2 (R2014a)Simscape 版本3.11 (R2014a)Simulink 3D Animation 版本7.1 (R2014a)Simulink Code Inspector 版本2.1 (R2014a)Simulink Coder 版本8.6 (R2014a)Simulink Control Design 版本4.0 (R2014a)Simulink Design Optimization 版本2.5 (R2014a)Simulink Design Verifier 版本2.6 (R2014a)Simulink PLC Coder 版本1.7 (R2014a)Simulink Real-Time 版本6.0 (R2014a)Simulink Report Generator 版本3.16 (R2014a)Simulink Verification and Validation 版本3.7 (R2014a) Spreadsheet Link EX 版本3.2.1 (R2014a)Stateflow 版本8.3 (R2014a)Statistics Toolbox 版本9.0 (R2014a)Symbolic Math Toolbox 版本6.0 (R2014a)System Identification Toolbox 版本9.0 (R2014a)SystemTest 版本2.6.7 (R2014a)Trading Toolbox 版本2.1 (R2014a)Vehicle Network Toolbox 版本2.2 (R2014a)Wavelet Toolbox 版本4.13 (R2014a)!mcc输出结果代码MCC Invoke MATLAB to C/C++ Compiler (Version 5.1).MCC [-options] fun [fun2 ...]Prepare fun.m for deployment outside of the MATLAB environment. Generate wrapper files in C or C++ and optionally build standalone binary files.Write any resulting files into the current directory, by default.For all targets except standalone, if more than one file is specified, a C or C++ interface is generated for each file.The only exception to this rule is when the file is specifiedwith a '-a' flag.If C or object files are specified, they are passed to MBUILD along with any generated C files.If conflicting options are presented to MCC, the rightmost conflictingoption is used.OPTIONS:a <filename> Add <filename> to the CTF archive. If the specified fileis an M, mex or p file, this function will not be exported in the resulting target.b Generate an MS Excel compatible formula function for thegiven list of MATLAB functions (requires MATLAB Builder EX). This option will be removed in a future release of MATLAB Builder for EX.B <filename>[:<arg>[,<arg>]] Specify bundle file. <filename> is a text file containing Compiler command line options. The Compiler behaves as if the "-B <filename>" were replaced by the contents of thebundle file. Newlines appearing in these files are allowed and are treated as whitespace. MathWorks provides options files for the following:ccom Used for building COM components on Windows(requires MATLAB Builder NE)cexcel Used for building Excel components on Windows(requires MATLAB Builder EX installed)cjava Used for building Java components (requiresMATLAB Builder JA installed)cpplib Used for building a C++ shared library.csharedlib Used for building a C shared library.dotnet Used for building .NET components on Windows(requires MATLAB Builder NE installed)C For stand-alone applications and shared libraries, generate a separate CTF archive. If this option is not specified, the CTF will be embedded within the stand-alone application or library.c C only. Generate C wrapper code. This is equivalent to "-T codegen" as the rightmost argument on the command line.d <directory> Output directory. All generated files will be put in<directory>.e Macro that generates a C Windows application on the Windows platform. On non-Windows platforms, it is the same as the macro -m. This isequivalent to the options "-W WinMain -T link:exe", which can be foundin the file <MATLAB>/toolbox/compiler/bundles/macro_option_e.f <filename> Override the default options file with the specifiedoptions file when calling MBUILD. This allows you to use differentANSI compilers. This option is a direct pass-through to the MBUILDscript. See "External Interfaces" documentation for moreinformation.g Debug. Include debugging symbol information.I <path> Include path. Add <path> to the list of paths to search forfiles. The MATLAB path is automatically included when runningfrom MATLAB. When running from DOS or the UNIX shell, theMATLAB Compiler includes the paths from pathdef.m in<matlabroot>/toolbox/local.l Create function library. This option is equivalent to -W lib-T link:lib. It generates library wrapper functions for each fileon the command line and calls your C compiler to build a sharedlibrary, which exports these functions. The library name is thecomponent name, which is either derived from the name of the firstfile on the command line or specified with the -n option.m Macro that generates a C stand-alone application. This isequivalent to the options "-W main -T link:exe", which can be foundin the file <MATLAB>/toolbox/compiler/bundles/macro_option_m.M "<string>" Pass <string> to the MBUILD script to build an executable. If -M is used multiple times, the rightmost occurrenceis used.N Clear path. Clear the compilation search path of all directoriesexcept the following core directories:<matlabroot>/toolbox/matlab<matlabroot>/toolbox/local<matlabroot>/toolbox/compiler<matlabroot>/toolbox/javabuilder for building Java components<matlabroot>/toolbox/dotnetbuilder for building .NET componentsIt also retains all subdirectories of the above list that appear onthe MATLAB path at compile time.o <outputfilename> Output name. Set the name of the final component and CTF archive to <outputfilename>. A suitable, possiblyplatform-dependent, extension is added to <outputfilename> (e.g.,".exe" for Windows stand-alone applications). The default outputfilename is the name of the first file (for stand-alone target)or the name specified with the -W option. See option W for more information.p <directory> Add <directory> to the compilation search path. Thisoption can only be used in conjunction with the -N option. Thisoption will add <directory> to the compilation search path in thesame order as in your MATLAB path. If directory is not an absolutepath, it is assumed to be under the current working directory. Therules for how these directories are included are* If <directory> is on the original MATLAB path, the <directory>and all its subdirectories that appear on the original path areadded to the compilation search path in the same order as itappears on MATLAB path.* If <directory> is not on the original MATLAB path, it is notincluded in the compilation. (You can use -I to add it.)If the same directory is added with both the -I and -p option (-N appearing before both the options), the directory will be added asper the rules of -p.R <option> Specify the run-time options for the MATLAB Common Runtime (MCR) usage:Supported MCR options are -nojvm, -nodisplay (UNIX ony) and -logfile.The -logfile option should always be followed by the name of the logfile.EXAMPLES:mcc -e -R '-logfile,bar.txt' -v foo.mmcc -m -R -nojvm -v foo.mmcc -m -R -nodisplay -v foo.mmcc -m -R -nojvm -R -nodisplay -v foo.mmcc -m -R '-nojvm,-nodisplay' foo.mmcc -m -R '-logfile,bar.txt,-nojvm,-nodisplay' -v foo.mS Create Singleton MCRCreate a singleton MCR when compiling a COM object. Eachinstance of the component uses the same MCR (requires MATLABBuilder NE).T <option> Specify target phase and type. The following table showsvalid <option> strings and their effects:codegen - Generate a C/C++ wrapper file.(This is the default -T setting.)compile:exe - Same as codegen, plus compile C/C++ files toobject form suitable for linking into astand-alone executable.compile:lib - Same as codegen, plus compile C/C++ files toobject form suitable for linking into a sharedlibrary/DLL.link:exe - Same as compile:exe, plus link object filesinto a stand-alone executable.link:lib - Same as compile:lib, plus link object filesinto a shared library/DLL.u Register the resulting COM component for the current user only on the development machine. It applies to Generic COM Component and Excel Add-in targets only.v Verbose. Show compilation steps.w list. List the warning strings that could be thrown by the MATLABCompiler during compilation. These <msgs> can be used with anotherform of the -w option to enable or disable the warnings or to throwthem as error messages.w <option>[:<msg>] Warnings. The possible options are "enable","disable", and "error". If "enable:<msg>" or "disable:<msg>" isspecified, enable or disable the warning associated with <msg>. If"error:<msg>" is specified, enable the warning associated with<msg> and treat any instances of that warning as an error. If the<option> but not ":<msg>" is specified, the Compiler applies theaction to all warning messages. For backward compatibility withprevious Compiler revisions, "-w" (with no option) is the same as"-w enable".W <option> Wrapper functions. Specify which type of wrapper fileshould be generated by the Compiler. <option> can be one of"main", "WinMain", "lib:<string>", "cpplib:<string>","com:<component-name>,<class-name>,<version>", or "none"(default). For the lib wrapper, <string> contains the name of theshared library to build.Y <license.dat file> Override the default license.dat file with thespecified argument.? Help. Display this help message.Command Line Option Available Only on Windows Platformswin32 Directs the execution of the 32-bit version of the MATLAB CompilerThe -win32 option is processed as a unitand does interfere with other option settings.EXAMPLES:Note: * Before using mcc, users should run 'mbuild -setup' from MATLAB andchoose a supported C/C++ compiler.* The executable generated with mcc can be run from the MATLAB commandwindow using the ! operator, e.g., !myfun.exeMake a stand-alone C executable for myfun.m:mcc -m myfunMake stand-alone C executable for myfun.m. Look formyfun.m in the directory /files/source, and put the resulting C filesand executable in the directory /files/target:mcc -m -I /files/source -d /files/target myfunMake a stand-alone C executable from myfun1.m and myfun2.m(using one mcc call):mcc -m myfun1 myfun2Make a C shared/dynamically linked library called "liba" from a0.m anda1.mmcc -W lib:liba -T link:lib a0 a1Make a CPP shared/dynamically linked library called "liba" from a0.mand a1.mmcc -W cpplib:liba -T link:lib a0 a1【安装说明】以下内容是为初次安装Matlab的新手提供,老手请直接跳过,或者可以参见serial文件夹中的Readme 文件。
电子信息工程专业课程翻译中英文对照表
Wireless Local Area Networks
计算机网络组网技术
Computer Network Con struct ion Tech no logy
现代通信网
Moder n Communi cati on Networks
计算机网络安全
Computer Networks Security
大学生职业生涯策划
(就业指导)
Career Pla nning (Guida nee of Employme nt )
专题学术讲座
Opti onal Course Lecture
科技文献写作
Sci-tech Docume nt Writi ng
专 业 平 台
课 群
高频电子线路
High-Freque ncy Electro nic Circuits
检测与转换技术
Signal Detect ion and Conversion Tech no logy
智能仪器
In tellige nt In strume nt Desig n
自动控制原理
Automatic Con trol Systems
计算机 网络工 程模块
无线传感器网络
Wireless Sen sor Networks
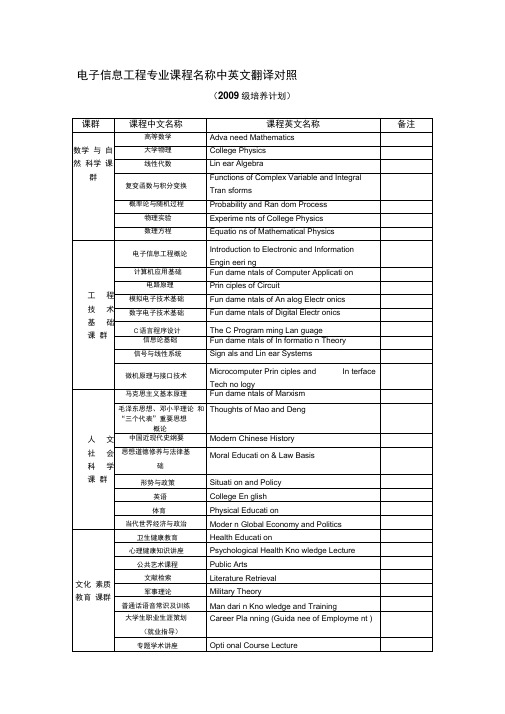
电子信息工程专业课程名称中英文翻译对照
(பைடு நூலகம்
课群
课程中文名称
课程英文名称
备注
数学 与 自然 科学 课群
高等数学
Adva need Mathematics
大学物理
College Physics
线性代数
Lin ear Algebra
复变函数与积分变换
matlab的基础用语含义

abs 绝对值, 模acos 反余弦acosh 反双曲余弦acot 反余切acoth 反双曲余切acsc 反余割acsch 反双曲余割all 所有元素均非零则为真alpha 透明控制angle 相角ans 最新表达式的运算结果any 有非零元则为真area 面域图asec 反正割asech 反双曲正割asin 反正弦asinh 反双曲正弦atan 反正切atan2 四象限反正切atanh 反双曲正切autumn 红、黄浓淡色axis 轴的刻度和表现B bbar 直方图binocdf 二项分布概率binopdf 二项分布累积概率binornd 产生二项分布随机数组blanks 空格符号bode 给出系统的对数频率曲线bone 蓝色调浓淡色阵box 坐标封闭开关break 终止最内循环brighten 控制色彩的明暗butter ButterWorth低通滤波器C ccaxis (伪)颜色轴刻度cd 设置当前工作目录cdf2rdf 复数对角型转换到实块对角型ceil 朝正无穷大方向取整cell 创建单元数组char 创建字符串数组或者将其他类型变量转化为字符串数组charfcn Maple函数Children 图形对象的子对象clabel 等高线标注class 判别数据类别clc 清除指令窗中显示内容clear 从内存中清除变量和函数clf 清除当前图形窗图形close 关闭图形窗collect 合并同类项Color 图形对象色彩属性colorbar 显示色条colorcube 三浓淡多彩交错色colordef 定义图形窗色彩colormap 设置色图comet 彗星状轨迹图comet3 三维彗星动态轨迹线图compass 射线图;主用于方向和速度cond 矩阵条件数conj 复数共轭continue 将控制转交给外层的for或while循环contour 等高线图contourf 填色等高线图conv 卷积和多项式相乘cool 青和品红浓淡色图copper 线性变化纯铜色调图corrcoef 相关系数cos 余弦cosh 双曲余弦cot 余切coth 双曲余切cov 协方差矩阵csc 余割csch 双曲余割cumsum 元素累计和cumtrapz 梯形法累计积分D ddblquad 二重(闭型)数值积分指令deconv 解卷和多项式相除del2 计算曲率demos 演示函数det 行列式的值diag 创建对角阵,抽取对角向量diff 求导数,差分和近似微分digits 控制符号数值的有效数字位数dir 列出目录清单dirac 单位冲激函数disp 显示矩阵和文字内容disttool 概率分布计算交互界面doc 列出指定工具包中所有函数名docsearch 进行多词条检索double 把符号常数转化为16位相对精度的浮点数值对象drawnow 刷新屏幕dsolve 求解符号常微分方程E eedit 矩阵编辑器,打开M文件Ei maple 指数积分eig 矩阵特征值和特征向量end 数组的最大下标,结束for,while,if 语句eps 浮点相对误差EraseMode 图形对象属性error 显示错误信息exit 关闭MATLABexp 指数expand 对指定项展开expm 矩阵指数eye 单位阵ezcontour 画等位线ezcontourf 画填色等位线ezmesh 画网线图ezmeshc 画带等位线的网线图ezplot 绘制符号表达式的二维图形ezplot3 画三维曲线ezpolar 画极坐标曲线ezsurf 画曲面图ezsurfc 画带等位线的曲面图F ffactor 进行因式或因子分解false 按指定大小创建全0逻辑数组feather 从X轴出发的复数向量图,羽毛图feval 函数宏指令fill 多边形填色图find 寻找非数单下标标识findsym 确认表达式中自由符号变量fix 朝零方向取整flag 红-白-蓝-黑交错色图fliplr 矩阵的左右翻转flipud 矩阵的上下翻转floor 朝负无穷大方向取整fminbnd 非线性函数在某区间中极小值fminsearch 单纯形法求多元函数极值点指令for (end) 按规定次数重复执行语句format 设置数据输出格式fourier Fourier变换fsolve 解非线性方程组的最简单格式function 函数文件头functions 观察函数句柄内涵function handle 函数句柄funfun 数值泛函函数和ODE解算器funm 计算一般矩阵函数fzero 单变量函数的零点G ggallery 产生测试矩阵gca 获得当前轴的柄gcf 获得当前图的柄general 通用指令get 获得图柄getframe 获得影片动画图象的帧ginput 用鼠标在图上获取数据global 定义全局变量gradient 梯度gray 线性灰度grid on/off 画坐标网格线H hheaviside 单位阶跃函数help 在线帮助指令helpbrowser 超文本文档帮助信息helpdesk 超文本文档帮助信息helpwin 打开在线帮助窗hidden 网线图消隐开关hist 统计频数直方图histfit 带拟曲线的统计频数直方图hold on/off 图形的保持horner 转换成嵌套形式hot 黑-红-黄-白交错色图hsv 饱和色彩图I ii, j 虚数单位if end 条件执行语句if-else-end 程序分支控制ifourier Fourier反变换ilaplace Laplace反变换imag 复数虚部image 图像impulse 给出系统的冲激响应ind2sub 据单下标换算出全下标inf 或Inf 无穷大inline 创建内联函数input 提示键盘输入int 计算积分int2str 整数转换为字符串inv 矩阵的逆invhilb Hilbert矩阵法求逆阵isa 判断指定变量类别ischar 若是字符串则为真isempty 若是空矩阵则为真isfinite 若是有限数则为真isglobal 若是全局变量则为真ishandle 是否图柄isinf 若是无穷大则为真isletter 串中是字母则为真islogical 若是逻辑数则为真isnan 若为非数则为真isnumeric 若是数值则为真isolate maple的特殊指令isprime 是否质数isreal 若是实数矩阵则为真isspace 串中是空格则为真iztrans Z反变换J jjacobian Jacobian 矩阵jet 变异HSV色图jordan Jordan分解K kkeyboard 键盘获得控制权L llaplace Laplace变换legend 形成图例说明length 确定数组长度light 灯光控制lighting 设置照明模式limit 求极限line 创建线对象LineStyle 图形线对象属性-线型LineWidth 图形属性-线宽linmod2 从SIMULINK模型得到系统的状态方程linspace 线性等分向量load 从磁盘调入数据变量Location 图形对象属性-位置log 自然对数log10 常用对数log2 以2为底的对数logical 将数值转化为逻辑值logspace 对数等分向量lookfor 关键词检索M mmagic 魔方阵maple 进入MAPLE工作空间计算Marker 图形对象属性-点形状MarkerEdge-Color 图形对象属性-点边界色彩MarkerFace-Color 图形对象属性-点域色彩MaekerSize 图形对象属性-点大小material 对象材质max 最大值md 创建目录mean 平均值mesh 三维网线图meshgrid 用于三维曲面的分格线坐标mfun 对MAPLE中若干经典特殊函数的数值计算mfunlist MAPLE经典特殊函数列表mhelp 查阅Maple中的库函数及其调用方法min 最小值minreal 状态方程最小实现mkdir 创建目录mod 模数求余more 命令窗口分页输出的控制开关movie 播放影片动画moviein 影片动画内存初始化mtaylor Taylor级数展开N nNaN或nan 非数nargin 函数输入量的个数nargout 函数输出量的个数ndims 数组的维数norm 矩阵或向量范数normcdf 正态分布累计概率normpdf 服从N分布的随机变量取值x的概率密度normrnd 产生服从N分布的随机数组notebook 创建或打开M-book文件null 零空间num2str 把数值转换为字符串numden 提取公因式O oode45 高阶法解微分方程ones 全1 数组optimsetorth 值空间P ppack 合并工作内存中的碎块pascal Pascal 矩阵path 控制MATLAB的搜索路径pathtool 修改搜索路径pause 暂停pcolor 用颜色反映数据的伪色图peaks 产生peaks图形数据pi 3.1415926535897….pie 饼形统计图pink 淡粉红色图阵plot 直角坐标下线性刻度曲线plot3 三维直角坐标曲线图plotyy 双纵坐标图polar 极坐标曲线图poly 特征多项式,由根创建多项式poly2sym 将多项式转换为符号多项式polyfit 多项式拟合polyval 求多项式的值polyvalm 求矩阵多项式的值pow2 2的幂pretty 习惯方式显示prism 光谱色图阵prod 元素积Q qquad 低阶法数值积分quadl 高阶法数值积分quit 退出MATLABquiver 二维箭头图;主用于场强、流向R rrand 均匀分布随机数组randn 正态分布随机数组random 产生各种分布随机数组randsrc 产生均布数组rank 秩real 复数实部realmax 最大浮点数realmin 最小正浮点数rem 求余数repmat 铺放模块数组reshape 矩阵变维residue 求部分分式表达return 返回roots 求多项式的根rose 频数扇形图;主用于统计rot90 矩阵逆时针旋转90度rotate 旋转指令round 四舍五入取整rref 转换为行阶梯形S ssave 把内存变量存入磁盘sec 正割sech 双曲正割set 设置图形对象属性shading 图形渲染模式shg 显示图形窗sign 函数符号,符号函数simple 运用各种指令化简符号表达式simplify 恒等式简化simulink 打开SIMULINK集成环境sin 正弦sinh 双曲正弦size 确定数组大小slice 切片图solve 求解代数方程组sphere 产生球面数据spinmap 颜色周期性变化操纵spring 青、黄浓淡色sqrt 平方根square 轴属性为方型ss 产生状态方程LTI对象stairs 阶梯形曲线图std 标准差stem 杆图stem3 三维离散杆图str2func 创建函数句柄(punct)strcmp 比较字符串String 图形对象属性-字符串subexpr 运用符号变量置换子表达式subplot 创建子图subs 通用置换指令sum 元素和summer 绿、黄浓淡色图阵surf 三维表面图surfc 带等高线的三维表面图switch-case 多个条件分支sym 产生符号对象syms 定义基本符号对象symsum 符号序列的求和T ttan 正切tanh 双曲正切taylor Taylor级数text 图形上文字标注tf 产生传递函数LTI对象tfdata 从对象中提取传递函数分子分母多项式系数tic 秒表起动title 图形名toc 秒表终止和显示trace 迹trapz 梯形数值积分true 按指定大小创建全1逻辑数组triplequad 三重(闭型)数值积分指令type 显示文件内容V vvar 求方差version MATLAB 版本view 设定3-D图形观测点vpa 给出数值型符号结果W wwhat 列出当前目录上的M、MAT、MEX文件which 确定指定文件所在的目录while end 不确定次数重复执行语句whitebg 图形底色控制who 列出工作内存中的变量名whos 列出工作内存中的变量细节winter 蓝、绿浓淡色X xxlabel X轴名标注xor 异或Y yYcolor 图形对象属性-纵轴颜色ylabel Y轴名标注Z zzeros 全零矩阵zlabel Z轴名标注zoom 二维图形的变焦放大ztrans Z变换Simulink模块Add 求和模块Breaker 开关Current Measurement 电流测量器Dc Voltage Source 直流电压源Discrete Filter 离散滤波器模块Gain 增益模块In1 输入端口模块Integrator 连续函数积分Out1 输出端口模块Parallel RLC Branch RLC并联支路PowerguiProduct 乘法器Random SourceScope 示波模块Series RLC Branch RLC串联支路Simulink SIMULINK基本库Sine Wave 正弦波输出Step 阶跃输出Transfer Fcn 传递函数模块Voltage Measurement 电压测量器一、MATLAB常用的基本数学函数abs(x):纯量的绝对值或向量的长度angle(z):复数z的相角(Phase angle)sqrt(x):开平方real(z):复数z的实部imag(z):复数z的虚部conj(z):复数z的共轭复数round(x):四舍五入至最近整数fix(x):无论正负,舍去小数至最近整数floor(x):地板函数,即舍去正小数至最近整数ceil(x):天花板函数,即加入正小数至最近整数rat(x):将实数x化为分数表示rats(x):将实数x化为多项分数展开sign(x):符号函数(Signum function)。
MATLAB的中英文翻译
MATLAB - The Language Of Technical ComputingMATLAB is a high-level language and interactive environment that enables you to perform computationally intensive tasks faster than with traditional programming languages such as C, C++, and Fortran. You can use MATLAB in a wide range of applications, including signal and image processing, communications, control design, test and measurement, financial modeling and analysis, and computational biology. Add-on toolboxes (collections of special-purpose MATLAB functions, available separately) extend the MATLAB environment to solve particular classes of problems in these application areas.MATLAB provides a number of features for documenting and sharing your work. You can integrate your MATLAB code with other languages and applications, and distribute your MATLAB algorithms and applications.MATLAB has key featuers as follows:(1)High-level language for technical computing (2)Development environment for managing code, files, and data (3)Interactive tools for iterative exploration, design, and problem solving 4)Mathematical functions for linear algebra, statistics, Fourier analysis, filtering, optimization, and numerical integration (5)2-D and 3-D graphics functions for visualizing data (6)Tools for building custom graphical user interfaces (7) Functions for integrating MATLAB based algorithms with external applications and languages, such as C, C++, Fortran, Java, COM, and Microsoft ExcelThe MATLAB language supports the vector and matrix operations that are fundamental to engineering and scientific problems. It enables fast development and execution. With the MATLAB language, you can program and develop algorithms faster than with traditional languages because you do not need to perform low-level administrative tasks, such as declaring variables, specifying data types, and allocating memory. In many cases, MATLAB eliminates the need for ‘for’ loops. As a result, one line of MATLAB code can often replace several lines of C or C++ code. At the same time, MATLAB provides all the features of a traditional programming language, including arithmetic operators, flow control, data structures, data types, object-oriented programming (OOP), and debugging features. MATLAB lets you execute commands or groups of commands one at a time, without compiling and linking, enabling you to quickly iterate to the optimal solution. For fast execution of heavy matrix and vector computations, MATLAB uses processor-optimized libraries. For general-purpose scalar computations, MATLAB generates machine-code instructions using its JIT (Just-In-Time) compilation technology. This technology, which is available on most platforms, provides execution speeds that rival those of traditional programming languages. MATLAB includes development tools that help you implement your algorithm efficiently. These include the following: MATLAB Editor - Provides standard editing and debugging features, such as setting breakpoints and single stepping. M-Lint Code Checker - Analyzes your code and recommends changes to improve its performance and maintainability. MATLAB Profiler - Records the time spentexecuting each line of code. Directory Reports- Scan all the files in a directory and report on code efficiency, file differences, file dependencies, and code coverage。
Matlab信号处理工具箱函数中英文对照

rceps 实时谱和最小相位重构
resample 任意倍数改变采样速率
specgram 频谱分析
upfirdn 利用fir滤波器转换采样频率
vco 电压控制振荡器
dpssclear 去除数据库Slepain序列
dpssdir 从数据库目录消去Slepain序列
dpssload 从数据库调入Slepain序列
dpsssave Slepain序列存入数据库
icceps 倒复时谱
interp 整数倍提高采样频率
medfilt1 一维中值滤波
modulate 通讯仿真调制
unwrap 相位角展开
zplane 零极点图
:handshake
线性系统变换
convmtx 卷积矩阵
latc2tf 格型滤波器转换为传递函数形式
poly2rc 多项式系数转换为反射系数
rc2poly 反射系数转换为多项式系数
residuez z-传递函数的部分分式展开
Matlab信号处理工具箱函数
波形产生和绘图
chirp 产生扫描频率余弦
diric 产生Dirichlet函数或周期Sinc函数
gauspuls 产生高斯调制正弦脉冲
pulstran 产生脉冲串
rectpuls 产生非周期矩形信号
sawtooth 产生锯齿波或三角波
sinc 产生sinc函数
fft 一维FFT
fft2 二维FFT
fftshift 函数fft和fft2输出的重新排列
hilbert 希尔伯特(Hilbert)变换
idct 离散余弦逆变换
matlab命令大全 (全面)解析
Matlab命令大全A aabs 绝对值、模、字符的ASCII码值acos 反余弦acosh 反双曲余弦acot 反余切acoth 反双曲余切acsc 反余割acsch 反双曲余割align 启动图形对象几何位置排列工具all 所有元素非零为真angle 相角ans 表达式计算结果的缺省变量名any 所有元素非全零为真area 面域图argnames 函数M文件宗量名asec 反正割asech 反双曲正割asin 反正弦asinh 反双曲正弦assignin 向变量赋值atan 反正切atan2 四象限反正切atanh 反双曲正切autumn 红黄调秋色图阵axes 创建轴对象的低层指令axis 控制轴刻度和风格的高层指令B bbar 二维直方图bar3 三维直方图bar3h 三维水平直方图barh 二维水平直方图base2dec X进制转换为十进制bin2dec 二进制转换为十进制blanks 创建空格串bone 蓝色调黑白色图阵box 框状坐标轴break while 或for 环中断指令brighten 亮度控制C ccapture (3版以前)捕获当前图形cart2pol 直角坐标变为极或柱坐标cart2sph 直角坐标变为球坐标cat 串接成高维数组caxis 色标尺刻度cd 指定当前目录cdedit 启动用户菜单、控件回调函数设计工具cdf2rdf 复数特征值对角阵转为实数块对角阵ceil 向正无穷取整cell 创建元胞数组cell2struct 元胞数组转换为构架数组celldisp 显示元胞数组内容cellplot 元胞数组内部结构图示char 把数值、符号、内联类转换为字符对象chi2cdf 分布累计概率函数chi2inv 分布逆累计概率函数chi2pdf 分布概率密度函数chi2rnd 分布随机数发生器chol Cholesky分解clabel 等位线标识cla 清除当前轴class 获知对象类别或创建对象clc 清除指令窗clear 清除内存变量和函数clf 清除图对象clock 时钟colorcube 三浓淡多彩交叉色图矩阵colordef 设置色彩缺省值colormap 色图colspace 列空间的基close 关闭指定窗口colperm 列排序置换向量comet 彗星状轨迹图comet3 三维彗星轨迹图compass 射线图compose 求复合函数cond (逆)条件数condeig 计算特征值、特征向量同时给出条件数condest 范-1条件数估计conj 复数共轭contour 等位线contourf 填色等位线contour3 三维等位线contourslice 四维切片等位线图conv 多项式乘、卷积cool 青紫调冷色图copper 古铜调色图cos 余弦cosh 双曲余弦cot 余切coth 双曲余切cplxpair 复数共轭成对排列csc 余割csch 双曲余割cumsum 元素累计和cumtrapz 累计梯形积分cylinder 创建圆柱D ddblquad 二重数值积分deal 分配宗量deblank 删去串尾部的空格符dec2base 十进制转换为X进制dec2bin 十进制转换为二进制dec2hex 十进制转换为十六进制deconv 多项式除、解卷delaunay Delaunay 三角剖分del2 离散Laplacian差分demo Matlab演示det 行列式diag 矩阵对角元素提取、创建对角阵diary Matlab指令窗文本内容记录diff 数值差分、符号微分digits 符号计算中设置符号数值的精度dir 目录列表disp 显示数组display 显示对象内容的重载函数dlinmod 离散系统的线性化模型dmperm 矩阵Dulmage-Mendelsohn 分解dos 执行DOS 指令并返回结果double 把其他类型对象转换为双精度数值drawnow 更新事件队列强迫Matlab刷新屏幕dsolve 符号计算解微分方程E eecho M文件被执行指令的显示edit 启动M文件编辑器eig 求特征值和特征向量eigs 求指定的几个特征值end 控制流FOR等结构体的结尾元素下标eps 浮点相对精度error 显示出错信息并中断执行errortrap 错误发生后程序是否继续执行的控制erf 误差函数erfc 误差补函数erfcx 刻度误差补函数erfinv 逆误差函数errorbar 带误差限的曲线图etreeplot 画消去树eval 串演算指令evalin 跨空间串演算指令exist 检查变量或函数是否已定义exit 退出Matlab环境exp 指数函数expand 符号计算中的展开操作expint 指数积分函数expm 常用矩阵指数函数expm1 Pade法求矩阵指数expm2 Taylor法求矩阵指数expm3 特征值分解法求矩阵指数eye 单位阵ezcontour 画等位线的简捷指令ezcontourf 画填色等位线的简捷指令ezgraph3 画表面图的通用简捷指令ezmesh 画网线图的简捷指令ezmeshc 画带等位线的网线图的简捷指令ezplot 画二维曲线的简捷指令ezplot3 画三维曲线的简捷指令ezpolar 画极坐标图的简捷指令ezsurf 画表面图的简捷指令ezsurfc 画带等位线的表面图的简捷指令F ffactor 符号计算的因式分解feather 羽毛图feedback 反馈连接feval 执行由串指定的函数fft 离散Fourier变换fft2 二维离散Fourier变换fftn 高维离散Fourier变换fftshift 直流分量对中的谱fieldnames 构架域名figure 创建图形窗fill3 三维多边形填色图find 寻找非零元素下标findobj 寻找具有指定属性的对象图柄findstr 寻找短串的起始字符下标findsym 机器确定内存中的符号变量finverse 符号计算中求反函数fix 向零取整flag 红白蓝黑交错色图阵fliplr 矩阵的左右翻转flipud 矩阵的上下翻转flipdim 矩阵沿指定维翻转floor 向负无穷取整flops 浮点运算次数flow Matlab提供的演示数据fmin 求单变量非线性函数极小值点(旧版)fminbnd 求单变量非线性函数极小值点fmins 单纯形法求多变量函数极小值点(旧版)fminunc 拟牛顿法求多变量函数极小值点fminsearch 单纯形法求多变量函数极小值点fnder 对样条函数求导fnint 利用样条函数求积分fnval 计算样条函数区间内任意一点的值fnplt 绘制样条函数图形fopen 打开外部文件for 构成for环用format 设置输出格式fourier Fourier 变换fplot 返函绘图指令fprintf 设置显示格式fread 从文件读二进制数据fsolve 求多元函数的零点full 把稀疏矩阵转换为非稀疏阵funm 计算一般矩阵函数funtool 函数计算器图形用户界面fzero 求单变量非线性函数的零点G ggamma 函数gammainc 不完全函数gammaln 函数的对数gca 获得当前轴句柄gcbo 获得正执行"回调"的对象句柄gcf 获得当前图对象句柄gco 获得当前对象句柄geomean 几何平均值get 获知对象属性getfield 获知构架数组的域getframe 获取影片的帧画面ginput 从图形窗获取数据global 定义全局变量gplot 依图论法则画图gradient 近似梯度gray 黑白灰度grid 画分格线griddata 规则化数据和曲面拟合gtext 由鼠标放置注释文字guide 启动图形用户界面交互设计工具H hharmmean 调和平均值help 在线帮助helpwin 交互式在线帮助helpdesk 打开超文本形式用户指南hex2dec 十六进制转换为十进制hex2num 十六进制转换为浮点数hidden 透视和消隐开关hilb Hilbert矩阵hist 频数计算或频数直方图histc 端点定位频数直方图histfit 带正态拟合的频数直方图hold 当前图上重画的切换开关horner 分解成嵌套形式hot 黑红黄白色图hsv 饱和色图I iif-else-elseif 条件分支结构ifft 离散Fourier反变换ifft2 二维离散Fourier反变换ifftn 高维离散Fourier反变换ifftshift 直流分量对中的谱的反操作ifourier Fourier反变换i, j 缺省的"虚单元"变量ilaplace Laplace反变换imag 复数虚部image 显示图象imagesc 显示亮度图象imfinfo 获取图形文件信息imread 从文件读取图象imwrite 把imwrite 把图象写成文件ind2sub 单下标转变为多下标inf 无穷大info MathWorks公司网点地址inline 构造内联函数对象inmem 列出内存中的函数名input 提示用户输入inputname 输入宗量名int 符号积分int2str 把整数数组转换为串数组interp1 一维插值interp2 二维插值interp3 三维插值interpn N维插值interpft 利用FFT插值intro Matlab自带的入门引导inv 求矩阵逆invhilb Hilbert矩阵的准确逆ipermute 广义反转置isa 检测是否给定类的对象ischar 若是字符串则为真isequal 若两数组相同则为真isempty 若是空阵则为真isfinite 若全部元素都有限则为真isfield 若是构架域则为真isglobal 若是全局变量则为真ishandle 若是图形句柄则为真ishold 若当前图形处于保留状态则为真isieee 若计算机执行IEEE规则则为真isinf 若是无穷数据则为真isletter 若是英文字母则为真islogical 若是逻辑数组则为真ismember 检查是否属于指定集isnan 若是非数则为真isnumeric 若是数值数组则为真isobject 若是对象则为真isprime 若是质数则为真isreal 若是实数则为真isspace 若是空格则为真issparse 若是稀疏矩阵则为真isstruct 若是构架则为真isstudent 若是Matlab学生版则为真iztrans 符号计算Z反变换J j , K kjacobian 符号计算中求Jacobian 矩阵jet 蓝头红尾饱和色jordan 符号计算中获得Jordan标准型keyboard 键盘获得控制权kron Kronecker乘法规则产生的数组L llaplace Laplace变换lasterr 显示最新出错信息lastwarn 显示最新警告信息leastsq 解非线性最小二乘问题(旧版)legend 图形图例lighting 照明模式line 创建线对象lines 采用plot 画线色linmod 获连续系统的线性化模型linmod2 获连续系统的线性化精良模型linspace 线性等分向量ln 矩阵自然对数load 从MAT文件读取变量log 自然对数log10 常用对数log2 底为2的对数loglog 双对数刻度图形logm 矩阵对数logspace 对数分度向量lookfor 按关键字搜索M文件lower 转换为小写字母lsqnonlin 解非线性最小二乘问题lu LU分解M mmad 平均绝对值偏差magic 魔方阵maple &nb, sp; 运作Maple格式指令mat2str 把数值数组转换成输入形态串数组material 材料反射模式max 找向量中最大元素mbuild 产生EXE文件编译环境的预设置指令mcc 创建MEX或EXE文件的编译指令mean 求向量元素的平均值median 求中位数menuedit 启动设计用户菜单的交互式编辑工具mesh 网线图meshz 垂帘网线图meshgrid 产生"格点"矩阵methods 获知对指定类定义的所有方法函数mex 产生MEX文件编译环境的预设置指令mfunlis 能被mfun计算的MAPLE经典函数列表mhelp 引出Maple的在线帮助min 找向量中最小元素mkdir 创建目录mkpp 逐段多项式数据的明晰化mod 模运算more 指令窗中内容的分页显示movie 放映影片动画moviein 影片帧画面的内存预置mtaylor 符号计算多变量Taylor级数展开N nndims 求数组维数NaN 非数(预定义)变量nargchk 输入宗量数验证nargin 函数输入宗量数nargout 函数输出宗量数ndgrid 产生高维格点矩阵newplot 准备新的缺省图、轴nextpow2 取最接近的较大2次幂nnz 矩阵的非零元素总数nonzeros 矩阵的非零元素norm 矩阵或向量范数normcdf 正态分布累计概率密度函数normest 估计矩阵2范数norminv 正态分布逆累计概率密度函数normpdf 正态分布概率密度函数normrnd 正态随机数发生器notebook 启动Matlab和Word的集成环境null 零空间num2str 把非整数数组转换为串numden 获取最小公分母和相应的分子表达式nzmax 指定存放非零元素所需内存O oode1 非Stiff 微分方程变步长解算器ode15s Stiff 微分方程变步长解算器ode23t 适度Stiff 微分方程解算器ode23tb Stiff 微分方程解算器ode45 非Stiff 微分方程变步长解算器odefile ODE 文件模板odeget 获知ODE 选项设置参数odephas2 ODE 输出函数的二维相平面图odephas3 ODE 输出函数的三维相空间图odeplot ODE 输出函数的时间轨迹图odeprint 在Matlab指令窗显示结果odeset 创建或改写ODE选项构架参数值ones 全1数组optimset 创建或改写优化泛函指令的选项参数值orient 设定图形的排放方式orth 值空间正交化P ppack 收集Matlab内存碎块扩大内存pagedlg 调出图形排版对话框patch 创建块对象path 设置Matlab搜索路径的指令pathtool 搜索路径管理器pause 暂停pcode 创建预解译P码文件pcolor 伪彩图peaks Matlab提供的典型三维曲面permute 广义转置pi (预定义变量)圆周率pie 二维饼图pie3 三维饼图pink 粉红色图矩阵pinv 伪逆plot 平面线图plot3 三维线图plotmatrix 矩阵的散点图plotyy 双纵坐标图poissinv 泊松分布逆累计概率分布函数poissrnd 泊松分布随机数发生器pol2cart 极或柱坐标变为直角坐标polar 极坐标图poly 矩阵的特征多项式、根集对应的多项式poly2str 以习惯方式显示多项式poly2sym 双精度多项式系数转变为向量符号多项式polyder 多项式导数polyfit 数据的多项式拟合polyval 计算多项式的值polyvalm 计算矩阵多项式pow2 2的幂ppval 计算分段多项式pretty 以习惯方式显示符号表达式print 打印图形或SIMULINK模型printsys 以习惯方式显示有理分式prism 光谱色图矩阵procread 向MAPLE输送计算程序profile 函数文件性能评估器propedit 图形对象属性编辑器pwd 显示当前工作目录Q qquad 低阶法计算数值积分quad8 高阶法计算数值积分(QUADL)quit 推出Matlab 环境quiver 二维方向箭头图quiver3 三维方向箭头图R rrand 产生均匀分布随机数randn 产生正态分布随机数randperm 随机置换向量range 样本极差rank 矩阵的秩rats 有理输出rcond 矩阵倒条件数估计real 复数的实部reallog 在实数域内计算自然对数realpow 在实数域内计算乘方realsqrt 在实数域内计算平方根realmax 最大正浮点数realmin 最小正浮点数rectangle 画"长方框"rem 求余数repmat 铺放模块数组reshape 改变数组维数、大小residue 部分分式展开return 返回ribbon 把二维曲线画成三维彩带图rmfield 删去构架的域roots 求多项式的根rose 数扇形图rot90 矩阵旋转90度rotate 指定的原点和方向旋转rotate3d 启动三维图形视角的交互设置功能round 向最近整数圆整rref 简化矩阵为梯形形式rsf2csf 实数块对角阵转为复数特征值对角阵rsums Riemann和S ssave 把内存变量保存为文件scatter3 三维散点图sec 正割sech 双曲正割semilogx X轴对数刻度坐标图semilogy Y轴对数刻度坐标图series 串联连接set 设置图形对象属性setfield 设置构架数组的域setstr 将ASCII码转换为字符的旧版指令sign 根据符号取值函数signum 符号计算中的符号取值函数sim 运行SIMULINK模型simget 获取SIMULINK模型设置的仿真参数simple 寻找最短形式的符号解simplify 符号计算中进行简化操作simset 对SIMULINK模型的仿真参数进行设置simulink 启动SIMULINK模块库浏览器sin 正弦sinh 双曲正弦size 矩阵的大小slice 立体切片图solve 求代数方程的符号解spalloc 为非零元素配置内存sparse 创建稀疏矩阵spconvert 把外部数据转换为稀疏矩阵spdiags 稀疏对角阵spfun 求非零元素的函数值sph2cart 球坐标变为直角坐标sphere 产生球面spinmap 色图彩色的周期变化spline 样条插值spones 用1置换非零元素sprandsym 稀疏随机对称阵sprank 结构秩spring 紫黄调春色图sprintf 把格式数据写成串spy 画稀疏结构图sqrt 平方根sqrtm 方根矩阵squeeze 删去大小为1的"孤维"sscanf 按指定格式读串stairs 阶梯图std 标准差step 阶跃响应指令str2double 串转换为双精度值str2mat 创建多行串数组str2num 串转换为数strcat 接成长串strcmp 串比较strjust 串对齐strmatch 搜索指定串strncmp 串中前若干字符比较strrep 串替换strtok 寻找第一间隔符前的内容struct 创建构架数组struct2cell 把构架转换为元胞数组strvcat 创建多行串数组sub2ind 多下标转换为单下标subexpr 通过子表达式重写符号对象subplot 创建子图subs 符号计算中的符号变量置换subspace 两子空间夹角sum 元素和summer 绿黄调夏色图superiorto 设定优先级surf 三维着色表面图surface 创建面对象surfc 带等位线的表面图surfl 带光照的三维表面图surfnorm 空间表面的法线svd 奇异值分解svds 求指定的若干奇异值switch-case-otherwise 多分支结构sym2poly 符号多项式转变为双精度多项式系数向量symmmd 对称最小度排序symrcm 反向Cuthill-McKee排序syms 创建多个符号对象T ttan 正切tanh 双曲正切taylortool 进行Taylor逼近分析的交互界面text 文字注释tf 创建传递函数对象tic 启动计时器title 图名toc 关闭计时器trapz 梯形法数值积分treelayout 展开树、林treeplot 画树图tril 下三角阵trim 求系统平衡点trimesh 不规则格点网线图trisurf 不规则格点表面图triu 上三角阵try-catch 控制流中的Try-catch结构type 显示M 文件U uuicontextmenu 创建现场菜单uicontrol 创建用户控件uimenu 创建用户菜单unmkpp 逐段多项式数据的反明晰化unwrap 自然态相角upper 转换为大写字母V vvar 方差varargin 变长度输入宗量varargout 变长度输出宗量vectorize 使串表达式或内联函数适于数组运算ver 版本信息的获取view 三维图形的视角控制voronoi Voronoi多边形vpa 任意精度(符号类)数值W wwarning 显示警告信息what 列出当前目录上的文件whatsnew 显示Matlab中Readme文件的内容which 确定函数、文件的位置while 控制流中的While环结构white 全白色图矩阵whitebg 指定轴的背景色who 列出内存中的变量名whos 列出内存中变量的详细信息winter 蓝绿调冬色图workspace 启动内存浏览器X x , Y y , Z zxlabel X轴名xor 或非逻辑yesinput 智能输入指令ylabel Y轴名zeros 全零数组zlabel Z轴名zoom 图形的变焦放大和缩小ztrans 符号计算Z变换MATLAB命令大全Prod 计算数组元素的连乘积。
对数正态分布的极大似然估计matlab
对数正态分布的极大似然估计matlab(中英文实用版)Task Title: Maximum Likelihood Estimation of Log-Normal Distribution in MATLABTask Title: 对数正态分布的极大似然估计MATLABIn this task, we aim to estimate the parameters of a log-normal distribution using the maximum likelihood estimation (MLE) method in MATLAB.The log-normal distribution is a continuous probability distribution of a random variable whose logarithm is normally distributed.It is characterized by two parameters: the mean (μ) and the variance (σ^2) of the logarithm.本任务中,我们使用最大似然估计(MLE)方法在MATLAB中对数正态分布的参数进行估计。
对数正态分布是一个连续概率分布,其定义为对数是正态分布的随机变量。
它由两个参数确定:对数的均值(μ)和对数的方差(σ^2)。
To perform the MLE in MATLAB, we first need to generate a dataset that follows a log-normal distribution.We can use the "logistic" function in MATLAB to generate random samples from a log-normal distribution.Let"s generate a dataset with 1000 observations having a mean of 0 and a variance of 1.在MATLAB中进行MLE之前,我们首先需要生成一个遵循对数正态分布的数据集。
课程库中英文对照

B0504040 B1002690 B1002810 C0504010 R0504010 C050401e C050401C F0502010 R0205420 C1201200 C1209580 B0306180 A0305440 R0305440 C1209250 C120925e C1501270 A1204010 C0405220 S1204510 B0402030 B1501500 A1501400 A1501430 B1501540 C1501190 A1501370 A1501410 C1501600 A1501380 C1501250 B1501490 C0101760 R0101010 R0101760 C1501300 B1501520 B0307080 C0307080 A1501420 C1501570 B1501470 C0208010 R0208010 B0207010 B0201210 B0208020
保险精算 保险精算 保险精算 保险人员上岗资格培训 保险人员上岗资格培训 保险人员上岗资格培训 保险学 保险学 保险学 保险学 保险学 保险学 保险学课程设计 保险学课程设计 保险营销 保险专业外语 报刊编辑学 比较司法制度 比较司法制度 毕业调研 毕业调研 毕业调研 毕业教育 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业论文 毕业设计
课程库
课程代码 C0500290 P1201170 P1201160 X1002490 A1002490 B1002490 B1002750 C1002490 C1009180 E994227e C0501100 C1002450 B1002720 C1009010 A1002600 B1002010 C1002010 C1002220 B0601420 B0102580 C0101370 R0101370 C1002460 C0503350 B1002340 B0405240 B0305020 C0305020 X0305020 A0501010 A0501080 C0501010 C0501080 F0501020 J0501010 S0706010 S0706011 S0706012 A0501090 C0601390 B0706210 C0706210 C0802110 B0800010 C0800010 课程中文名称 (C#) B/S软件开发基础 “两课”实践(二) “两课”实践(一) ACM程序设计 ACM程序设计 ACM程序设计 ACM程序设计 ACM程序设计 ACM程序设计 程序设计 C 程序设计 C#WinForm应用程序开发 C#程序设计 C#程序设计 C++程序设计 C++程序设计 C++程序设计 C++程序设计 C++与面向对象技术 CAD原理与应用 CAE软件及应用 CAE软件及应用 Cisco 网络设备互连初步 CISCO认证课程 CMM CMOS模拟集成电路设计 CRM系统原理 CRM系统原理 CRM系统原理 C语言程序设计 C语言程序设计 C语言程序设计 C语言程序设计 C语言程序设计 C语言程序设计 C语言程序设计实习 c语言程序设计实习1 c语言程序设计实习2 C语言课程设计 DCS与现场总线技术 Delphi 程序设计 Delphi 程序设计 DSP技术与应用 DSP芯片原理与应用 DSP芯片原理与应用
液位控制系统中英文对照外文翻译文献

液位控制系统中英⽂对照外⽂翻译⽂献中英⽂对照翻译The liquid level control system based ondde\matlab\simulinkProcess control is an important application field of automatic technology, it is to point to the level, temperature, flow control process variables, such as in metallurgy, machinery, chemical, electric power, etc can be widely used. Especially liquid level control technology in real life, played an important role in production, for example, the water supply, civil water tower if low water levels, can affect people's lives in water; Industrial enterprises with water, if the drainage water drainage or controlled properly or not, in relation to the workshop of condition; Boiler drum, if the control level boiler is too low, can make level boiler overheating, possible accident; Jing flow, liquid level control tower control accuracy and level of the craft can influence the quality of the products and the cost, etc. In these production field, are basically labor strength or the operation has certain risk nature of work, extremely prone to accidents caused by operating error, the losses, killing manufacturer. Visible, in actual production, liquid level control accuracy and control effects directly affect the factory production cost and economic benefit of safety coefficient. Even equipment So, in order to ensure safety, convenient operation, you have to research the development of a d v a n c e d l e v e l c o n t r o l m e t h o d s a n d s t r a t e g i e s.The graduation design topic is the liquid level control system based on dde\matlab\simulink\force control, Among them was controlled object for tank level, Communication mode for DDE communications , Matlab is mainly used in the simulation test ,And force control software used for modeling, This system mainly through combination of hardware and software device to achieve precise control of liquid level , In modern industry level control of important component, it influence upon production not allow to ignore, in order to ensure safety in production and the product quality and quantity, the level and perform effective control is very necessary, The following is a description of all aspects:⼀PID controllerA proportional–integral–derivative controller (PID controller) is a generic .control loop feedback mechanism widely used in industrial control systems.A PID controller attempts to correct the error between a measured process variable and a desired set point by calculating and then outputting a corrective action that can adjust the process accordingly.The PID controller calculation (algorithm) involves three separate parameters; the Proportional, the Integral and Derivative values. The Proportional value determines the reaction to the current error, the Integral determines the reaction based on the sum of recent errors and the Derivative determines the reaction to the rate at which the error has been changing. The weighted sum of these three actions is used to adjust the process via a control element such as the position of a control valve or the power supply of a heating element. By "tuning" the three constants in the PID controller algorithm the PID can provide control action designed for specific process requirements. The response of the controller can be described in terms of the responsiveness of the controller to an error, the degree to which the controller overshoots the set point and the degree of system oscillation. Note that the use of the PID algorithm for control does not guarantee optimal control of the system or system stability.Some applications may require using only one or two modes to provide the appropriate system control. This is achieved by setting the gain of undesired control outputs to zero. A PID controller will be called a PI, PD, P or I controller in the absence of the respective control actions. PI controllers are particularly common, since derivative action is very sensitive to measurement noise, and the absence of an integral value may prevent the system from reaching its target value due to the control action.1.Control loop basicsA familiar example of a control loop is the action taken to keep one's shower water at the ideal temperature, which typically involves the mixing of two process streams, cold and hot water. The person feels the water to estimate its temperature. Based on this measurement they perform a control action: use the cold water tap to adjust the process. The person would repeat this input-output control loop, adjusting the hot water flow until the process temperature stabilized at the desired value.Feeling the water temperature is taking a measurement of the process value or process variable (PV). The desired temperature is called the set point (SP). The output from the controller and input to the process (the tap position) is called the manipulated variable (MV). The difference between the measurement and the set point is the error (e), too hot or too cold and by how much. As a controller, one decides roughly how much to change the tap position (MV) after one determines the temperature (PV), and therefore the error. This first estimate is the equivalent of the proportional action of a PID controller. The integral action of a PID controller can be thought of as gradually adjusting the temperature when it is almost right.Derivative action can be thought of as noticing the water temperature is getting hotter or colder, and how fast, and taking that into account when deciding how to adjust the tap,Making a change that is too large when the error is small is equivalent to a high gain controller and will lead to overshoot. If the controller were to repeatedly make changes that were too large and repeatedly overshoot the target, this control loop would be termed unstable and the output would oscillate around the set point in either a constant, growing, or decaying sinusoid. A human would not do this because we are adaptive controllers, learning from the process history, but PID controllers do not have the ability to learn and must be set up correctly. Selecting the correct gains for effective control is known as tuning the controller.If a controller starts from a stable state at zero error (PV = SP), then further changes by the controller will be in response to changes in other measured or unmeasured inputs to the process that impact on the process, and hence on the PV. Variables that impact on the process other than the MV are known as disturbances and generally controllers are used to reject disturbances and/or implement set point changes. Changes in feed water temperature constitute a disturbance to the shower process.In theory, a controller can be used to control any process which has a measurable output (PV), a known ideal value for that output (SP) and an input to the process (MV) that will affect the relevant PV. Controllers are used in industry to regulate temperature, pressure, flow rate, chemical composition, speed and practically every other variable for which a measurement exists. Automobile cruise control is an example of a process which utilizes automated control.Due to their long history, simplicity, well grounded theory and simple setup and maintenance requirements, PID controllers are the controllers of choice for many ofthese applications.2.PID controller theoryNote: This section describes the ideal parallel or non-interacting form of the PID controller. For other forms please see the Section "Alternative notation and PID forms".The PID control scheme is named after its three correcting terms, whose sum constitutes the manipulated variable (MV). Hence:where Pout, Iout, and Dout are the contributions to the output from the PID controller from each of the three terms, as defined below.2.1. Proportional termThe proportional term makes a change to the output that is proportional to the current error value. The proportional response can be adjusted by multiplying the error by a constant Kp, called the proportional gain.The proportional term is given by:WherePout: Proportional outputKp: Proportional Gain, a tuning parametere: Error = SP ? PVt: Time or instantaneous time (the present)Change of response for varying KpA high proportional gain results in a large change in the output for a given change in the error. If the proportional gain is too high, the system can become unstable (See the section on Loop Tuning). In contrast, a small gain results in a small output response to a large input error, and a less responsive (or sensitive) controller. If the proportional gain is too low, the control action may be too small when responding to system disturbances.In the absence of disturbances, pure proportional control will not settle at its target value, but will retain a steady state error that is a function of the proportional gain and the process gain. Despite the steady-state offset, both tuning theory and industrial practice indicate that it is the proportional term that should contribute the bulk of the output change.2.2.Integral termThe contribution from the integral term is proportional to both the magnitude of the error and the duration of the error. Summing the instantaneous error over time (integrating the error) gives the accumulated offset that should have been corrected previously. The accumulated error is then multiplied by the integral gain and added to the controller output. The magnitude of the contribution of the integral term to the overall control action is determined by the integral gain, Ki.The integral term is given by:Iout: Integral outputKi: Integral Gain, a tuning parametere: Error = SP ? PVτ: Time in the past contributing to the integral responseThe integral term (when added to the proportional term) accelerates the movement of the process towards set point and eliminates the residual steady-state error that occurs with a proportional only controller. However, since the integral term is responding to accumulated errors from the past, it can cause the present value to overshoot the set point value (cross over the set point and then create a deviation in the other direction). For further notes regarding integral gain tuning and controller stability, see the section on loop tuning.2.3 Derivative termThe rate of change of the process error is calculated by determining the slope of the error over time (i.e. its first derivative with respect to time) and multiplying this rate of change by the derivative gain Kd. The magnitude of the contribution of the derivative term to the overall control action is termed the derivative gain, Kd.The derivative term is given by:Dout: Derivative outputKd: Derivative Gain, a tuning parametere: Error = SP ? PVt: Time or instantaneous time (the present)The derivative term slows the rate of change of the controller output and this effect is most noticeable close to the controller setpoint. Hence, derivative control isused to reduce the magnitude of the overshoot produced by the integral component and improve the combined controller-process stability. However, differentiation of a signal amplifies noise and thus this term in the controller is highly sensitive to noise in the error term, and can cause a process to become unstable if the noise and the derivative gain are sufficiently large.2.4 SummaryThe output from the three terms, the proportional, the integral and the derivative terms are summed to calculate the output of the PID controller. Defining u(t) as the controller output, the final form of the PID algorithm is:and the tuning parameters areKp: Proportional Gain - Larger Kp typically means faster response since thelarger the error, the larger the Proportional term compensation. An excessively large proportional gain will lead to process instability and oscillation.Ki: Integral Gain - Larger Ki implies steady state errors are eliminated quicker. The trade-off is larger overshoot: any negative error integrated during transient response must be integrated away by positive error before we reach steady state.Kd: Derivative Gain - Larger Kd decreases overshoot, but slows down transient response and may lead to instability due to signal noise amplification in the differentiation of the error.⼆Matlab IntroductionThe MATLAB? environment is well suited to rapid prototyping and application development. The interactive programming environment, built-in math functions, toolboxes, editing and debugging tools, and deployment options all contribute to reducing your overall development time.By using the built-in math functions and the many specialized functions contained within our toolboxes, MATLAB can significantly reduce the time it takes you to develop prototypes. In addition to integrated editing and debugging tools, MATLAB provides a performance profiler to help you further optimize your code when programming in MATLAB.Building applications around complex algorithms and graphics is easier than everwith the GUI builder, GUIDE. GUIDE was redesigned in MATLAB 6 to save you time. It offers all the drag and drop interface options you would expect, such as text boxes, radio buttons, check boxes, listboxes, sliders, pop-up menus, frames and more.When you're ready to deploy your application, the MathWorks offers a number of different options that allow you to either convert or interface your MATLAB application to other environments including C/C++ and the Web. MATLAB is the most productive development environment for creating scientific and engineering applications because it offers powerful tools for every step in the process to reduce your overall development time.MATLAB is a high-performance language for technical computing. It integrates computation, visualization, and programming in an easy-to-use environment where problems and solutions are expressed in familiar mathematical notation. Typical uses includeMath and computationAlgorithm developmentData acquisitionModeling, sim ulation, and prototypingData analysis, exploration, and visualizationScientific and engineering graphicsApplication development, including graphical user interface building三DDE IntroductionDynamic data exchange (DDE, Dynamic data exchange) is real-time exchange data between applications, it is the effective method between different applications to share data a agreement. DDE agreement is a kind of open, and language unrelated, based on protocol, it allows multiple applications to any human agreed format data exchange or command. It is application through Shared memory process of the communication between a form, also need not user intervention of good data exchange method.DDE applications can be divided into four types: client and server and client/server and the monitor. Conversation is a basic concept of DDE. DDE conversation happened in client applications and server application between. Customer is responsible for initializing and attendant session and control conversation flow, from the server application request data or services; The server applicationresponse client applications of data or service request. Client/server applications is both client applications and server application request, it can be and can provide information. Monitor application for debugging purposes. DDE applications can have multiple burst conversation, a service applications can also have multiple client applications, a client applications can to multiple requests data service applications, and an application can also act as client applications and services applications, when don't need the service application data or service, the customer will terminate session. DDE agreement must be synchronous control the news session, but in different application can switch between asynchronous session. DDE Application using the three layer identification system: Application name apply), theme name (from) and project name (Item). Application name (also called service name) is located at the top of the hierarchical structure, the service application registration for pointed out that particular DDE server application name, customer the application wants to establish session with the server application must be specified application name when this string marks; Name in every conversation topics is one and to identify logical data connection string, is the total classification, data it defines a server application conversation theme content, the server application can support one or more theme name; Project name identifies exchange unit of data string, furthermore confirm the conversation of detailed information, every theme name may have one or more project name.Example: for a database interface applications, will it supports database name as a theme name, and will all sorts of SQL commands as project name, because the server application can support one or more theme, and each theme name name may have one or more project name; So, when to change or reconstruct a conversation, just changing the subject name or project name can.四force control IntroductionForce control is Beijing SANWEI force control technology and "soft" control strategy software, real-time database and its management system, Web portal of tools and other products. These products are not isolated, and the force control is an application scale can free the system structure, the whole expansion force control system and its various products are made from some components procedures according to certain combinations and become. So this guide is not specifically targeted specific products separately describes the use of method, but the common use of all products introduced method. Force control configuration software is a can run on Windows 98/2000 / NT environment, and can run on Windows CE, DOS embedded environment control fu- nctions such as software modules. It USES function diagram way for users provide interface, possess and real-time database, graphical interface system and communication function.Force charged with monitoring configuration software is to the field production data acquisition and process control of specialized software, the biggest characteristic is to flexible "configuration mode" instead of programming approach to system integration, and it provides a good user interface and simple engineering development, as long as the realization method of software module of pre-settings simple "configuration", it can easily realization and complete monitoring layer each function, shorten the automation engineer system integration time, greatly improve the efficiency of integration.Force charged with monitoring configuration software is in the automatic control system monitoring layer level software platform, it can also and the domestic and foreign various industrial control network communication equipment manufacturer, it is ok with high reliable industrial controlling computer and network system integration, can achieve the purpose of the centralized management and monitoring, and can also be convenient to control layer and management for software and hardware to implement all the interface, with "third party" hardware and software systems for integration.The control strategy in the force control, an application in generator may have a lot of control strategy, but only one main strategy. The Lord, the Lord was first execution strategy calls. Other strategies strategy Strategy nested grade 4, namely for most 0 ~ 3 level, in this category 4, grade 3 0 level supreme, the lowest. Senior strategy can call low-level strategy, and low-level strategy can't call senior strategy. In addition to tier 3 most can have 127 strategy outside, other three grades maximum respectively are 255 strategy. Control strategy of by some basic function blocks, a function blocks represent an operation, algorithm or variables. Function blocks basic execution element is strategy, similar to an integrated circuit blocks, have several input and output, each input and output tube feet all have the only name.Force control control strategy is in control strategy, edited generated generators in automatic control strategy for strategies when inventory compiled, and check grammar mistakes, compile can also manually. Control strategy, and you can also call between if A strategy was B strategy calls, says A is B son strategy. A functional block can be repeated calls, each calls are automa- tically entitled to a name by. The executive order and function block in the position of screen on the upper left, position relevant function block, according to priority execution left after the first order under implementation.Force control control strategy of basic function blocks generator was divided into five categories: variable function blocks, mathematical operation function blocks, program control function blocks, logic function blocks function block and control algorithm.基于matlab\dde\simulink\⼒控的液位控制系统过程控制是⾃动技术的重要应⽤领域,它是指对液位、温度、流量等过程变量进⾏控制,在冶⾦、机械、化⼯、电⼒等⽅⾯得到了⼴泛应⽤。
matlab中英文翻译文献
附录英文原文Scene recognition for mine rescue robotlocalization based on visionAbstract:A new scene recognition system was presented based on fuzzy logic and hidden Markov model(HMM) that can be applied in mine rescue robot localization during emergencies. The system uses monocular camera to acquire omni-directional images of the mine environment where the robot locates. By adopting center-surround difference method, the salient local image regions are extracted from the images as natural landmarks. These landmarks are organized by using HMM to represent the scene where the robot is, and fuzzy logic strategy is used to match the scene and landmark. By this way, the localization problem, which is the scene recognition problem in the system, can be converted into the evaluation problem of HMM. The contributions of these skills make the system have the ability to deal with changes in scale, 2D rotation and viewpoint. The results of experiments also prove that the system has higher ratio of recognition and localization in both static and dynamic mine environments.Key words: robot location; scene recognition; salient image; matching strategy; fuzzy logic; hidden Markov model1 IntroductionSearch and rescue in disaster area in the domain of robot is a burgeoning and challenging subject[1]. Mine rescue robot was developed to enter mines during emergencies to locate possible escape routes for those trapped inside and determine whether it is safe for human to enter or not. Localization is a fundamental problem in this field. Localization methods based on camera can be mainly classified into geometric, topological or hybrid ones[2]. With its feasibility and effectiveness, scene recognition becomes one of the important technologies of topological localization.Currently most scene recognition methods are based on global image features and have two distinct stages: training offline and matching online.During the training stage, robot collects the images of the environment where it works and processes the images to extract global features that represent the scene. Some approaches were used to analyze the data-set of image directly and some primary features were found, such as the PCA method [3]. However, the PCA method is not effective in distinguishing the classes of features. Another type of approach uses appearance features including color, texture and edge density to represent the image. For example, ZHOU et al[4] used multidimensional histograms to describe global appearance features. This method is simple but sensitive to scale and illumination changes. In fact, all kinds of global image features are suffered from the change of environment.LOWE [5] presented a SIFT method that uses similarity invariant descriptors formed by characteristic scale and orientation at interest points to obtain the features. The features are invariant to image scaling, translation, rotation and partially invariant to illumination changes. But SIFT may generate 1 000 or more interest points, which may slow down the processor dramatically.During the matching stage, nearest neighbor strategy(NN) is widely adopted for its facility and intelligibility[6]. But it cannot capture the contribution of individual feature for scene recognition. In experiments, the NN is not good enough to express the similarity between two patterns. Furthermore, the selected features can not represent the scene thoroughly according to the state-of-art pattern recognition, which makes recognition not reliable[7].So in this work a new recognition system is presented, which is more reliable and effective if it is used in a complex mine environment. In this system, we improve the invariance by extracting salient local image regions as landmarks to replace the whole image to deal with large changes in scale, 2D rotation and viewpoint. And the number of interest points is reduced effectively, which makes the processing easier. Fuzzy recognition strategy is designed to recognize the landmarks in place of NN, which can strengthen the contribution of individual feature for scene recognition. Because of its partial information resuming ability, hidden Markov model is adopted to organize those landmarks, which can capture the structure or relationship among them. So scene recognition can be transformed to the evaluation problem of HMM, which makes recognition robust.2 Salient local image regions detectionResearches on biological vision system indicate that organism (like drosophila) often pays attention to certain special regions in the scene for their behavioral relevance or local image cues while observing surroundings [8]. These regions can be taken as natural landmarks to effectively represent and distinguish different environments. Inspired by those, we use center-surround difference method to detect salient regions in multi-scale image spaces. The opponencies of color and texture are computed to create the saliency map.Follow-up, sub-image centered at the salient position in S is taken as the landmark region. The size of the landmark region can be decided adaptively according to the changes of gradient orientation of the local image [11].Mobile robot navigation requires that natural landmarks should be detected stably when environments change to some extent. To validate the repeatability on landmark detection of our approach, we have done some experiments on the cases of scale, 2D rotation and viewpoint changes etc. Fig.1 shows that the door is detected for its saliency when viewpoint changes. More detailed analysis and results about scale and rotation can be found in our previous works[12].3 Scene recognition and localizationDifferent from other scene recognition systems, our system doesn’t need training offline. In other words, our scenes are not classified in advance. When robot wanders, scenes captured at intervals of fixed time are used to build the vertex of a topological map, which represents the place where robot locates. Although the map’s geometric layout is ignored by the localization system, it is useful for visualization and debugging[13] and beneficial to path planning. So localization means searching the best match of current scene on the map. In this paper hidden Markov model is used to organize the extracted landmarks from current scene and create the vertex of topological map for its partial information resuming ability.Resembled by panoramic vision system, robot looks around to get omni-images. FromFig.1 Experiment on viewpoint changeseach image, salient local regions are detected and formed to be a sequence, named as landmark sequence whose order is the same as the image sequence. Then a hidden Markov model is created based on the landmark sequence involving k salientlocal image regions, which is taken as the description of the place where the robot locates. In our system EVI-D70 camera has a view field of ±170°. Considering the overlap effect, we sample environment every 45° to get 8 images.Let the 8 images as hidden state Si (1≤i≤8), the created HMM can be illustrated by Fig.2. The parameters of HMM, aij and bjk, are achieved by learning, using Baulm-Welch algorithm[14]. The threshold of convergence is set as 0.001.As for the edge of topological map, we assign it with distance information between two vertices. The distances can be computed according to odometry readings.Fig.2 HMM of environmentTo locate itself on the topological map, robot must run its ‘eye’ on environment and extract a landmark sequence L1′ − Lk′ , then search the map for the best matched vertex (scene). Different from traditional probabilistic localization[15], in our system localization problem can be converted to the evaluation problem of HMM. The vertex with the greatest evaluation value, which must also be greater than a threshold, is taken as the best matched vertex, which indicates the most possible place where the robot is.4 Match strategy based on fuzzy logicOne of the key issues in image match problem is to choose the most effective features or descriptors to represent the original image. Due to robot movement, those extracted landmark regions will change at pixel level. So, the descriptors or features chosen should be invariant to some extent according to the changes of scale, rotation and viewpoint etc. In this paper, we use 4 features commonly adopted in the community that are briefly described as follows.GO: Gradient orientation. It has been proved that illumination and rotationchanges are likely to have less influence on it[5].ASM and ENT: Angular second moment and entropy, which are two texture descriptors.H: Hue, which is used to describe the fundamental information of the image.Another key issue in match problem is to choose a good match strategy or algorithm. Usually nearest neighbor strategy (NN) is used to measure the similarity between two patterns. But we have found in the experiments that NN can’t adequately exhibit the individual descriptor or feature’s contribution to similarity measurement. As indicated in Fig.4, the input image Fig.4(a) comes from different view of Fig.4(b). But the distance between Figs.4(a) and (b) computed by Jefferey divergence is larger than Fig.4(c).To solve the problem, we design a new match algorithm based on fuzzy logic for exhibiting the subtle changes of each features. The algorithm is described as below.And the landmark in the database whose fused similarity degree is higher than any others is taken as the best match. The match results of Figs.2(b) and (c) are demonstrated by Fig.3. As indicated, this method can measure the similarity effectively between two patterns.Fig.3 Similarity computed using fuzzy strategy5 Experiments and analysisThe localization system has been implemented on a mobile robot, which is built by our laboratory. The vision system is composed of a CCD camera and a frame-grabber IVC-4200. The resolution of image is set to be 400×320 and the sample frequency is set to be 10 frames/s. The computer system is composed of 1 GHz processor and 512 M memory, which is carried by the robot. Presently the robot works in indoor environments.Because HMM is adopted to represent and recognize the scene, our system has the ability to capture the discrimination about distribution of salient local image regions and distinguish similar scenes effectively. Table 1 shows the recognition result of static environments including 5 laneways and a silo. 10 scenes are selected from each environment and HMMs are created for each scene. Then 20 scenes are collected when the robot enters each environment subsequently to match the 60 HMMs above.In the table, “truth” means that the scene to be localized matches with the right scene (the evaluation value of HMM is 30% greater than the second high evaluation). “Uncertainty” means that the ev aluation value of HMM is greater than the second high evaluation under 10%. “Error match” means that the scene to be localized matches with the wrong scene. In the table, the ratio of error match is 0. But it is possible that the scene to be localized can’t match any scenes and new vertexes are created. Furthermore, the “ratio of truth” about silo is lower because salient cues are fewer in this kind of environment.In the period of automatic exploring, similar scenes can be combined. The process can be summarized as: when localization succeeds, the current landmark sequence is added to the accompanying observation sequence of the matched vertex un-repeatedly according to their orientation (including the angle of the image from which the salient local region and the heading of the robot come). The parameters of HMM are learned again.Compared with the approaches using appearance features of the whole image (Method 2, M2), our system (M1) uses local salient regions to localize and map, which makes it have more tolerance of scale, viewpoint changes caused by robot’smovement and higher ratio of recognition and fewer amount of vertices on the topological map. So, our system has better performance in dynamic environment. These can be seen in Table 2. Laneways 1, 2, 4, 5 are in operation where some miners are working, which puzzle the robot.6 Conclusions1) Salient local image features are extracted to replace the whole image to participate in recognition, which improve the tolerance of changes in scale, 2D rotation and viewpoint of environment image.2) Fuzzy logic is used to recognize the local image, and emphasize the individual feature’s contribution to recognition, which improves the reliability of landmarks.3) HMM is used to capture the structure or relationship of those local images, which converts the scene recognition problem into the evaluation problem of HMM.4) The results from the above experiments demonstrate that the mine rescue robot scene recognition system has higher ratio of recognition and localization.Future work will be focused on using HMM to deal with the uncertainty of localization.中文翻译基于视觉的矿井救援机器人场景识别摘要:基于模糊逻辑和隐马尔可夫模型(HMM),论文提出了一个新的场景识别系统,可应用于紧急情况下矿山救援机器人的定位。
matlab legend 中英文 公式
matlab legend 中英文公式IntroductionIn MATLAB, the legend function is used to create a legend for plots in a graphical user interface. The legend can display text, symbols, and mathematical expressions that explain the data being displayed on the plot. In this document, we will discuss how to create legends in MATLAB that include both English and Chinese text, as well as mathematical formulas.Creating a Legend with English TextTo create a legend with English text in MATLAB, you can use the legend function with a cell array of strings as input. For example, if you have two plots with labels "Data A" and "Data B", you can create a legend like this:```Matlabplot(1:10, rand(1, 10), 'b');hold on;plot(1:10, rand(1, 10), 'r');legend({'Data A', 'Data B'});```This will create a legend with the labels "Data A" and "Data B" corresponding to the two plots.Creating a Legend with Chinese TextTo create a legend with Chinese text in MATLAB, you need to set the character encoding to UTF-8 and use the correct font that supports Chinese characters. You can do this by setting the'Interpreter' property of the legend function to 'latex' and using LaTeX syntax to display Chinese characters. For example:```Matlab% Set character encoding to UTF-8set(0, 'defaultTextInterpreter', 'latex');% Create legend with Chinese textlegend({'数据A', '数据B'});```This will create a legend with the labels "数据A" and "数据B" displayed in Chinese characters.Creating a Legend with Mathematical FormulasTo create a legend with mathematical formulas in MATLAB, you can use LaTeX syntax to display the formulas. For example, ifyou have a plot with a curve described by the equation $y =x^2$, you can create a legend like this:```Matlabx = 0:0.1:10;y = x.^2;plot(x, y);legend({'$y = x^2$'}, 'Interpreter', 'latex');```This will create a legend with the mathematical formula $y = x^2$ displayed in the legend.ConclusionIn this document, we have discussed how to create legends in MATLAB that include both English and Chinese text, as well as mathematical formulas. By using the legend function along with the correct settings for character encoding and font, you can create informative and visually appealing legends for your plots in MATLAB.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MATLAB7.1中文翻译
MATLAB MATLAB 主程序模块
Simulink 动态仿真模块
Aerospace Blockset 航空模块集
Bioinformatics Toolbox 生物信息学工具箱
CDMA Reference Blockset CDMA 参考模块集
Communications Blockset 通信模块集
Communications Toolbox 通信工具箱
Control System Toolbox 控制系统工具箱
Curve Fitting Toolbox 曲线拟合工具箱
DSP Blockset 数字信号模块集
Data Acquisition Toolbox 数据采集工具箱
Database Toolbox 数据库工具箱
Datafeed Toolbox 数据反馈工具箱
Distributed Computing Toolbox 分布式计算工具箱
Dials and Gauges Blockset 刻度标尺模块集
Embedded Target for Motorola MPC 555 摩托罗拉MPC555 嵌入对象
Embedded Target for the TI C2000 DSP TI C2000 DSP嵌入对象
Embedded Target for TI 6000 DSP TI 6000数字信号处理嵌入对象
Embedded Target for Infineon C166 Microcontrollers Infineon C166 微控制器嵌入对象Embedded Target for Motorola? HC12 Motorola? HC12嵌入对象
Embedded Target for OSEK/VDX? OSEK/VDX?嵌入对象
Excel Link Excel 连接
Extended Symbolic Math 扩展符号数学库
Filter Design Toolbox 滤波器设计工具箱
Filter Design HDL Coder 滤波器设计硬件描述语言编码器
Financial Derivatives Toolbox 金融预测工具箱
Financial Time Series Toolbox 金融时间系列工具箱
Financial Toolbox 金融系统工具箱
Fixed-Income Toolbox 定点收益工具箱
Fixed-Point Blockset 定点模块集
Fuzzy Logic Toolbox 模糊逻辑工具箱
GARCH Toolbox GARCH 工具箱
Genetic Algorithm and Direct Search Toolbox 遗传算法和直接搜寻工具箱Gauges Blockset Gauges模块集
Image Processing Toolbox 图像处理工具箱
Image Acquisition Toolbox 图像调节工具箱
Instrument Control Toolbox 设备控制工具箱
LMI Control Toolbox LMI 控制工具箱
MATLAB Com Builder MATLAB COM 文件编辑器
MATLAB Compiler MATLAB 编译器
MATLAB Excel Builder MATLAB 外部编辑器
MATLAB Link for code composer studio MATLAB 与代码设计工作室的连接MATLAB Link for ModelSim MATLAB与ModelSim的连接
MATLAB Report Generator MATLAB 报告生成器
MATLAB Runtime Server MATLAB 运行时间服务器
MATLAB Webs Server MATLAB 支持Web 服务器
MATLAB? Distributed Computing Engine MATLAB? 分布式计算引擎Mapping Toolbox 地图工具箱
Model Predictive Control Toolbox 模型预测控制工具箱
Model-Based Calibration Toolbox 基于模型标准工具箱
Mu-Analysis and Synthesis Toolbox
MU 分析与合成工具箱
Neural Network Toolbox 神经网络工具箱
Nonlinear Control Design Blockset 非线性控制设计模块集
OPC Toolbox OPC工具箱
Optimization Toolbox 优化工具箱
Partial Differential Equation Toolbox 偏微分方程工具箱
Real-Time Windows Target 实时视窗对象
Real-Time Workshop 实时工作室
Real-Time Workshop Embedded Coder 实时工作室内嵌编码器Requirements Management Interface 需求管理界面
Robust Control Toolbox 强(鲁棒)控制工具箱
RF Toolbox RF工具箱
SB2SL(converts models to Simulink) 模型转换成Simulink工具
Signal Processing Toolbox 信号处理工具箱
Signal Processing Blockset 信号处理模块集
Sim Driveline SIM动力传动系统
Sim Mechanics SIM机械学
Sim Power Systems SIM电力系统
Simulink Performance ToolsSimulink 执行工具箱
Simulink Report Generator Simulink 报表生成器
Simulink Verification and Validation Simulink 核实与验证
Simulink Response Optimization Simulink响应优化
Simulink Parameter Estimation Simulink 参数估计
Simulink Fixed Point Simulink不动点
Simulink Control Design Simulink控制设计
Simulink Accelerator Simulink加速器
Spline Toolbox 样条工具箱
Stateflow 状态流
Stateflow Coder 状态流编码器
Statistics Toolbox 统计工具箱
Symbolic Math Toolbox 符号数学工具箱
System Identification Toolbox 系统识别工具箱
Virtual Reality Toolbox 虚拟现实工具箱
Video and Image Processing Blockset 视频和图像处理模块集Wavelet Toolbox 小波分析工具箱
xPC Target XPC对象
xPC Target Embedded Option XPC对象内嵌属性。