MATLABSIMULINK最常见问题
matlab学习资料:Simulink学习中的100个问答

matlab学习资料:Simulink学习中的100个问答1.命令行如何运行simulink外部模式build和start用sim()函数该函数的调用格式为:[t,x,y]=sim(f1,tspan,options,ut)其中f1为SIMULINK的模型名,tspan为仿真时间控制变量;参数options为模型控制参数;ut为外部输入向量。
2.请问matlab中的仿真模块,可以看到起源程序吗?那些基本模块是看不了源代码的,有很多模块是用subsystem组成的,你可以用look under mask(鼠标右键)看到里面是怎样用子模块搭接的,还有很多是由s函数写成的simulink的模块,这些直接edit sfunname(s函数的名字)就可以看到源代码3.请问:在simulink参数中设置的步长是50e-6,在系统中有一个simout模块向MA TLAB 中传递数据,但是希望以1e-3的步长获取数据,因该如何设计?在simout模块中直接设定仿真步长是不能运行的。
需要插入一个"zero order hold"模块,将该模块的采样时间设置为1e-03就可以了4.simulink中IGBT等电力元件都有个m极,是什么作用的?用于测量流过IGBT电流及其电压5.用simlink画的图,在示波器中显示,如何复制到word中告诉你一个办法,在加上示波器的地方加上to workspace,改为array,在主窗口中plot,直接抓过去也行吧。
Edit下有copy model选项6.simulink中的mask问题,请问如何封装,prompt,varible填啥,如何初始化prompt中,填写变量的提示,如:直线斜率variable中填写变量名.如:k-------------------------------------------------------------------------有关神经网络工具箱1.为什么当训练和仿真时,命令窗口会出现一堆warning?如:*WARNING* TRAINBPX is an obsolete function.Use NNT2FF and TRAIN to update and train your network.Type NNTW ARN OFF to suppress NNT warning messages.2.trainbpx,simuff这些命令应该怎么用?你用的神经网络不太适合你的matlab版本,有点过时了,对于BP网络,像用newff训练就没问题,建议你可买一本较新的神经网络参考书。
Simulink中的常见问题
仿真命令: sim ---仿真运行一个simulink模块 sldebug ---调试一个simulink模块 simset ---设置仿真参数 simget ---获取仿真参数线性化和整理命令: linmod ---从连续时间系统中获取线性模型(状态方程) linmod2 ---也是获取线性模型,采用高级方法 dinmod ---从离散时间系统中获取线性模型 trim ---为一个仿真系统寻找稳定的状态参数构建模型命令:open_system --打开已有的模型close_system --关闭打开的模型或模块new_system --创建一个新的空模型窗口load_system --加载已有的模型并使模型不可见 save_system --保存一个打开的模型 add_block --添加一个新的模块 add_line --添加一条线(两个模块之间的连线) delete_block --删除一个模块 delete_line --删除一根线find_system --查找一个模块hilite_system --使一个模块醒目显示replace_block --用一个新模块代替已有的模块set_param --为模型或模块设置参数get_param --获取模块或模型的参数add_param --为一个模型添加用户自定义的字符串参数delete_param --从一个模型中删除一个用户自定义的参数bdclose --关闭一个simulink窗口bdroot --根层次下的模块名字gcb --获取当前模块的名字 gcbh --获取当前模块的句柄 gcs --获取当前系统的名字getfullname --获取一个模块的完全路径名slupdate --将1.x的模块升级为3.x的模块addterms --为未连接的端口添加terminators模块boolean --将数值数组转化为布尔值slhelp --simulink的用户向导或者模块帮助封装命令:hasmask --检查已有模块是否封装 hasmaskdlg --检查已有模块是否有封装的对话框 hasmaskicon --检查已有模块是否有封装的图标 iconedit --使用ginput函数来设计模块图标 maskpopups --返回并改变封装模块的弹出菜单项 movemask --重建内置封装模块为封装的子模块诊断命令:sllastdiagnostic --上一次诊断信息sllasterror --上一次错误信息sllastwarning --上一次警告信息 sldiagnostics --为一个模型获取模块的数目和编译状态用sim()函数该函数的调用格式为:[t,x,y]=sim(f1,tspan,options,ut) 其中f1为SIMULINK的模型名,tspan为仿真时间控制变量;参数options为模型控制参数;ut 为外部输入向量。
simulink命令集及常见问题

simulink命令集(转载)仿真命令:sim ---仿真运行一个simulink模块sldebug ---调试一个simulink模块simset ---设置仿真参数simget ---获取仿真参数线性化和整理命令:linmod ---从连续时间系统中获取线性模型(状态方程)linmod2 ---也是获取线性模型,采用高级方法dinmod ---从离散时间系统中获取线性模型trim ---为一个仿真系统寻找稳定的状态参数构建模型命令:open_system --打开已有的模型close_system --关闭打开的模型或模块new_system --创建一个新的空模型窗口load_system --加载已有的模型并使模型不可见save_system --保存一个打开的模型add_block --添加一个新的模块add_line --添加一条线(两个模块之间的连线)delete_block --删除一个模块delete_line --删除一根线find_system --查找一个模块hilite_system --使一个模块醒目显示replace_block --用一个新模块代替已有的模块set_param --为模型或模块设置参数get_param --获取模块或模型的参数add_param --为一个模型添加用户自定义的字符串参数delete_param --从一个模型中删除一个用户自定义的参数bdclose --关闭一个simulink窗口bdroot --根层次下的模块名字gcb --获取当前模块的名字gcbh --获取当前模块的句柄gcs --获取当前系统的名字getfullname --获取一个模块的完全路径名slupdate --将1.x的模块升级为3.x的模块addterms --为未连接的端口添加terminators模块boolean --将数值数组转化为布尔值slhelp --simulink的用户向导或者模块帮助封装命令:hasmask --检查已有模块是否封装hasmaskdlg --检查已有模块是否有封装的对话框hasmaskicon --检查已有模块是否有封装的图标iconedit --使用ginput函数来设计模块图标maskpopups --返回并改变封装模块的弹出菜单项movemask --重建内置封装模块为封装的子模块诊断命令:sllastdiagnostic --上一次诊断信息sllasterror --上一次错误信息sllastwarning --上一次警告信息sldiagnostics --为一个模型获取模块的数目和编译状态硬拷贝和打印命令:frameedit --编辑打印画面print --将simulink系统打印成图片,或将图片保存为m文件printopt --打印机默认设置orient --设置纸张的方向-----------------------------------------------------------------------------附件包含好多simulink的例程,对于初学者和高手都需要的东西,大家多多支持作者:mikle 发表时间:2008-8-18 12:15:00第1楼模块名(Source library) 用途Band_Limited White Noise 把白噪声加到连续系统中Chip Signal 产生一个频率不断增大的正弦波Clock 显示和提供仿真时间Constant 产生一个常值Digital Clock 在规定的采样间隔产生仿真时间From File 从文件读取数据From Workspace 从工作面上定义的矩阵中读数据Pulse Generator 在固定的时间间隔产生脉冲Random Number 产生正态分布的随机数Repeating Sequence 产生规律重复的任意信号Signal Generator 产生各种不同的波形Sine Wave 产生一个正弦波Step Input 产生一个阶跃函数模块名(Sinks library) 用途Auto_Scale Graph Scope 在MA TLAB自动调整显示比例的图形窗口显示信号Graph Scope 在MA TLAB图形窗口显示信号Hit Crossing 在规定值附近增加仿真步数Scope 在仿真过程中显示信号Stop Simulation 当输入不为零时停止仿真To File 把数据输出到文件中To Workspace 把数据输出到工作面上定义的一个矩阵中XY Graph Scope 在MA TLAB图形窗口中显示信号的X—Y图模块名(Discrete library) 用途Discrete-Time Integrator 对一个信号进行离散积分Discrete-Time Limited Integrator 对一个信号进行离散有限积分Discrete State-Space 建立一个离散状态空间模型Discrete Transfer Fcn 建立一个离散传递函数Discrete Zero-Pole 以零极点形式建立一个离散传递函数Filter 建立IIR和FIR滤波器First-Order Hold 建立一阶采样保持器Unit Delay 对一个信号延迟一个采样周期Zero-Order Hold 建立一个采样周期的零阶保持器模块名(Linear library) 用途Derivative 对输入信号进行微分Gain 对输入信号乘上一个常数增益Inner Product 对输入信号进行点积Integrator 对输入信号进行积分Matrix Gain 对输入信号乘上一个矩阵增益Slider Gain 以滑动形式改变增益State-Space 建立一个线性状态空间模型Sum 对输入信号进行求和Transfer Fcn 建立一个线性传递函数Zero-Pole 以零极点形式建立一个传递函数模块名(Nonlinear library) 用途Abs 输出输入信号的绝对值Backlash 用放映的方式模仿一个系统的特性Combinatorial 建立一张真值表Coulombic Friction 在原点不连续而在原点以外具有线性增益Dead Zone 提供一个死区Fcn 对输入进行规定的表示Limited Integrator 在规定的范围内进行积分Logical Operator 对输入进行规定的逻辑运算Look-up Table 对输入进行分段的线性映射MA TLAB Fcn 定义一个函数对输入信号进行处理Memory 输出本模块上一步的输入值Product 对输入信号进行乘积运算Quantizer 对输入信号进行量化处理Rate Limiter 限制信号的变化速率Relational Operator 对输入进行一定的关系运算Relay 在两个值中轮流输出Reset Integrator 在仿真中对积分器进行重新初始化Saturation 对输入信号进行限幅Sign 符号函数Swith 在两个输入之间进行开关Transport Delay 对输入信号进行一定的延迟2-D Look-Up Table 对两个输入信号进行分段的线性映射V ariable Transport Delay 对输入信号进行不定量的延迟模块名(Connections library) 用途Demux 把向量信号分开输出Inport 给系统提供一个外部输出Mux 把几个信号合并成向量形式Outport 给系统规定一个输出Subsystem 表示一个系统在另外一个系统中作者:mikle 发表时间:2008-8-18 12:58:00第2楼simulink常见问题集锦:命令行如何运行simulink外部模式build和start用sim()函数该函数的调用格式为:[t,x,y]=sim(f1,tspan,options,ut)其中f1为SIMULINK的模型名,tspan为仿真时间控制变量;参数options为模型控制参数;ut为外部输入向量。
Simulink中的常见问题要点
仿真命令:sim ---仿真运行一个simulink模块sldebug ---调试一个simulink模块simset ---设置仿真参数simget ---获取仿真参数线性化和整理命令:linmod ---从连续时间系统中获取线性模型(状态方程) linmod2 ---也是获取线性模型,采用高级方法dinmod ---从离散时间系统中获取线性模型trim ---为一个仿真系统寻找稳定的状态参数构建模型命令:open_system --打开已有的模型close_system --关闭打开的模型或模块new_system --创建一个新的空模型窗口load_system --加载已有的模型并使模型不可见save_system --保存一个打开的模型add_block --添加一个新的模块add_line --添加一条线(两个模块之间的连线)delete_block --删除一个模块delete_line --删除一根线find_system --查找一个模块hilite_system --使一个模块醒目显示replace_block --用一个新模块代替已有的模块set_param --为模型或模块设置参数get_param --获取模块或模型的参数add_param --为一个模型添加用户自定义的字符串参数delete_param --从一个模型中删除一个用户自定义的参数bdclose --关闭一个simulink窗口bdroot --根层次下的模块名字gcb --获取当前模块的名字gcbh --获取当前模块的句柄gcs --获取当前系统的名字getfullname --获取一个模块的完全路径名slupdate --将1.x的模块升级为3.x的模块addterms --为未连接的端口添加terminators模块boolean --将数值数组转化为布尔值slhelp --simulink的用户向导或者模块帮助封装命令:hasmask --检查已有模块是否封装hasmaskdlg --检查已有模块是否有封装的对话框hasmaskicon --检查已有模块是否有封装的图标iconedit --使用ginput函数来设计模块图标maskpopups --返回并改变封装模块的弹出菜单项sllastdiagnostic --上一次诊断信息sllasterror --上一次错误信息sllastwarning --上一次警告信息sldiagnostics --为一个模型获取模块的数目和编译状态用sim()函数该函数的调用格式为:[t,x,y]=sim(f1,tspan,options,ut)其中f1为SIMULINK的模型名,tspan为仿真时间控制变量;参数options为模型控制参数;ut为外部输入向量。
matlab simulink中中电池并联电流分配
matlab simulink中中电池并联电流分配在Matlab Simulink中,电池并联电流分配是一种常见的问题。
当我们将多个电池并联连接时,电流会在这些电池之间分配。
这种分配取决于各个电池的内部电阻和电压。
在Simulink中,我们可以使用电路模型来模拟这个过程,并计算出每个电池的电流分配情况。
首先,我们需要创建一个Simulink模型来表示电池的并联连接。
我们可以使用Simulink库中的电源模块来表示电池,并使用连接线将它们连接在一起。
为了简化模型,我们可以假设所有的电池具有相同的内部电阻和电压。
接下来,我们需要设置每个电池的内部电阻和电压。
在Simulink中,我们可以使用参数设置模块来设置这些参数。
通过调整这些参数的值,我们可以模拟不同的电池配置和工作条件。
然后,我们需要添加一个电流测量模块来测量每个电池的电流。
在Simulink中,我们可以使用示波器模块来进行测量。
将示波器模块连接到每个电池的正极和负极之间,就可以测量到每个电池的电流值。
在模拟运行之前,我们需要设置模拟参数。
在Simulink中,我们可以设置模拟时间、步长和其他参数。
通过调整这些参数的值,我们可以获得更准确的模拟结果。
当一切准备就绪后,我们可以开始运行模拟。
在Simulink中,我们可以点击“运行”按钮来启动模拟。
模拟过程会根据设置的参数进行运行,并计算出每个电池的电流分配情况。
在模拟完成后,我们可以查看结果。
在Simulink中,我们可以使用示波器模块来显示每个电池的电流曲线。
通过观察这些曲线,我们可以了解到每个电池的电流分配情况。
总结起来,Matlab Simulink提供了一种方便的方法来模拟并联电池的电流分配。
通过创建一个Simulink模型,并设置适当的参数,我们可以计算出每个电池的电流分配情况,并观察到结果。
这对于设计和优化并联电池系统非常有帮助。
希望这篇文章对你有所帮助!。
simulink问题
simulink问题命令⾏如何运⾏simulink外部模式build和start⽤sim()函数该函数的调⽤格式为:[t,x,y]=sim(f1,tspan,options,ut)其中f1为SIMULINK的模型名,tspan为仿真时间控制变量;参数options 为模型控制参数;ut为外部输⼊向量。
--------------------------------------------------------------------------------请问matlab中的仿真模块,可以看到起源程序吗?那些基本模块是看不了源代码的,有很多模块是⽤subsystem组成的,你可以⽤look under mask(⿏标右键)看到⾥⾯是怎样⽤⼦模块搭接的,还有很多是由s函数写成的simulink的模块,这些直接edit sfunname(s函数的名字) 就可以看到源代码--------------------------------------------------------------------------------请问:在simulink参数中设置的步长是50e-6,在系统中有⼀个simout模块向MATLAB中传递数据,但是希望以1e-3的步长获取数据,因该如何设计?在simout 模块中直接设定仿真步长是不能运⾏的。
需要插⼊⼀个"zero order hold"模块,将该模块的采样时间设置为1e-03就可以了。
--------------------------------------------------------------------------------simulink中IGBT等电⼒元件都有个m极,是什么作⽤的?⽤于测量流过IGBT电流及其电压--------------------------------------------------------------------------------⽤simlink画的图,在⽰波器中显⽰,如何复制到word中告诉你⼀个办法,在加上⽰波器的地⽅加上to workspace改为array在主窗⼝中plot直接抓过去也⾏吧。
simulink小问题锦集

simulink命令集、小问题集锦仿真命令:sim ---仿真运行一个simulink模块sldebug ---调试一个simulink模块simset ---设置仿真参数simget ---获取仿真参数线性化和整理命令:linmod ---从连续时间系统中获取线性模型(状态方程) linmod2 ---也是获取线性模型,采用高级方法dinmod ---从离散时间系统中获取线性模型trim ---为一个仿真系统寻找稳定的状态参数构建模型命令:open_system --打开已有的模型close_system --关闭打开的模型或模块new_system --创建一个新的空模型窗口load_system --加载已有的模型并使模型不可见save_system --保存一个打开的模型add_block --添加一个新的模块add_line --添加一条线(两个模块之间的连线)delete_block --删除一个模块delete_line --删除一根线find_system --查找一个模块hilite_system --使一个模块醒目显示replace_block --用一个新模块代替已有的模块set_param --为模型或模块设置参数get_param --获取模块或模型的参数add_param --为一个模型添加用户自定义的字符串参数delete_param --从一个模型中删除一个用户自定义的参数bdclose --关闭一个simulink窗口bdroot --根层次下的模块名字gcb --获取当前模块的名字gcbh --获取当前模块的句柄gcs --获取当前系统的名字getfullname --获取一个模块的完全路径名slupdate --将1.x的模块升级为3.x的模块addterms --为未连接的端口添加terminators模块boolean --将数值数组转化为布尔值slhelp --simulink的用户向导或者模块帮助封装命令:hasmask --检查已有模块是否封装hasmaskdlg --检查已有模块是否有封装的对话框hasmaskicon --检查已有模块是否有封装的图标iconedit --使用ginput函数来设计模块图标maskpopups --返回并改变封装模块的弹出菜单项movemask --重建内置封装模块为封装的子模块诊断命令:sllastdiagnostic --上一次诊断信息sllasterror --上一次错误信息sllastwarning --上一次警告信息sldiagnostics --为一个模型获取模块的数目和编译状态硬拷贝和打印命令:frameedit --编辑打印画面print --将simulink系统打印成图片,或将图片保存为m文件printopt --打印机默认设置orient --设置纸张的方向命令行如何运行simulink外部模式build和start用sim()函数该函数的调用格式为:[t,x,y]=sim(f1,tspan,options,ut)其中f1为SIMULINK的模型名,tspan为仿真时间控制变量;参数options为模型控制参数;ut为外部输入向量。
simulink的若干小问题总结
1.回调函数的设置a.整个模型的回调函数设置:File->Model properties(模型属性)->callback页中可设置整个模型的回调函数(通常可将一些初始化数据写成m脚本文件,然后在初始化回调函数中调用此m文件,完成初始化,免得每次运行模型前都要RUN m文件)b.单个模块回调函数的设置右击模块->Block properties(模块属性)callback页中可设置单个模块的回调函数2.数据点限制问题a.Scope(示波器)示波器默认的显示点数是5000,超过5000个点时,只会显示后5000个点;修改方法:示波器属性->Data history页->将limit data points to last前面的对勾去掉;b.out模块out模块输出数据到工作空间时,默认的点数是1000,超过1000点时只输出后1000点,修改方法:Simulation菜单->Configuration Paraments对话框->Data Import/Export页->limit data points to last前面的对勾去掉;使用simout模块就不存在这个问题。
(当需要将数据输出作谱分析时,应使用simout模块,这样才有恒定的采样时间)3.矩阵的相关操作a.矩阵乘除法乘法模块和除法模块默认的是点除,改成矩阵除法的方法,双击模块弹出属性对话框->Main页Multiplication项改为Matrix(*)同理,增益模块也可改为矩阵乘,有四个选项(其中K为增益矩阵,u为信号矩阵):K.*u,K*u,u*K,K*u(u为向量)b.矩阵的连接在simulink->Math Operation->Matrix Connection(矩阵组合模块);可以完成矩阵组合工作,一般不用mux来完成,因为其拼接的方式不好定义。
c.恒值向量当在恒值里输入一恒值行向量时,要将属性中的Interpret vector parameters as 1-D(1维的意思)前的对勾去掉。
simulink model error

simulink model error怎么解决Simulink 中的模型错误可能有多种原因,以下是一些常见的Simulink 模型错误及其解决方法:1. 模型未完全加载:-解决方法:确保你的模型完全加载。
重新打开模型或者使用`File -> Save` 保存模型,然后重新加载。
2. 模型参数错误:-解决方法:检查模型参数设置,确保它们符合你的系统要求。
特别是检查Solver 配置和模型配置参数。
3. 模型拓扑错误:-解决方法:检查模型的连接,确保信号和模块之间的连接正确。
使用"Check Model" 或"Model Advisor" 来检查拓扑错误。
4. 非法或缺失的块:-解决方法:检查模型中的所有块,确保它们都是有效的且没有缺失。
5. 仿真时间过短或过长:-解决方法:调整仿真时间,确保它在合理的范围内。
检查Solver 设置中的仿真时间参数。
6. 变量未定义:-解决方法:检查模型中的变量,确保它们在使用之前被正确定义。
在MATLAB 命令行中尝试运行模型中使用的变量,确保它们没有语法错误。
7. MATLAB 版本兼容性:-解决方法:检查Simulink 模型的兼容性,确保你使用的MATLAB 和Simulink 版本是兼容的。
有时,升级到最新版本可以解决兼容性问题。
8. 缺失的工具箱:-解决方法:如果你的模型使用了特定的工具箱,确保这些工具箱已经安装且许可证有效。
9. 打开模型时的路径问题:-解决方法:如果模型文件移动了位置,确保MATLAB 的当前工作路径正确,并且模型可以正确找到。
10. 使用Model Advisor 进行检查:-解决方法:在Simulink 中使用"Model Advisor" 工具,该工具可以帮助你检查模型并提供解决方案。
如果以上方法仍未解决问题,可以查看MATLAB 命令行中的错误消息以获取更详细的信息,或者在MathWorks 的支持社区中咨询其他用户的经验。
MATLAB Simulink:常见语法错误

MATLAB Simulink:常见语法错误
1、Index must be a positive integer or logical.MATLAB索引从1开始,索引是正整数,当使用负数或小数即报该错误
2、Undefined function or variable “B”.
使用的变量或函数未定义,可能是未定义,也可能是定义了但前后变量名或函数名不统一
3、Inner matrix dimensions must agree.
矩阵运算要满足其运算法则
4、Function definitions are not permitted at the prompt or in scripts.
不能在命令窗口或脚本文件中定义自定义函数
5、Index out of bounds because numel(A)=5.
索引超出维度,比如对五维向量索引到7
6、In an assignment A(I) = B, the number of elements in B and I must be the same.
赋值时等号左右两侧的维度或元素数需保持一致
7、Expression or statement is incorrect--possibly unbalanced (, {, or [.
左右括号数不等,即表达式不完整
8、Too many input arguments.
使用函数,输入的参数过多。
simulink命令集及常见问题

simulin k命令集(转载)仿真命令:sim ---仿真运行一个s imulin k模块sldebug---调试一个sim ulink模块simset---设置仿真参数simget---获取仿真参数线性化和整理命令:linmod---从连续时间系统中获取线性模型(状态方程) linmod2---也是获取线性模型,采用高级方法dinmod---从离散时间系统中获取线性模型trim ---为一个仿真系统寻找稳定的状态参数构建模型命令:open_sy stem --打开已有的模型close_s ystem--关闭打开的模型或模块new_sys tem --创建一个新的空模型窗口load_sy stem --加载已有的模型并使模型不可见save_sy stem --保存一个打开的模型add_blo ck --添加一个新的模块add_lin e --添加一条线(两个模块之间的连线)delete_block--删除一个模块delete_line --删除一根线find_sy stem --查找一个模块hilite_system --使一个模块醒目显示replace_block --用一个新模块代替已有的模块set_par am --为模型或模块设置参数get_par am --获取模块或模型的参数add_par am --为一个模型添加用户自定义的字符串参数 delete_param--从一个模型中删除一个用户自定义的参数 bdclose--关闭一个sim ulink窗口bdroot--根层次下的模块名字gcb --获取当前模块的名字gcbh --获取当前模块的句柄gcs --获取当前系统的名字getfull name --获取一个模块的完全路径名slupdat e --将1.x的模块升级为3.x的模块addterm s --为未连接的端口添加term inator s模块boolean--将数值数组转化为布尔值slhelp--simulin k的用户向导或者模块帮助封装命令:hasmask--检查已有模块是否封装hasmask dlg --检查已有模块是否有封装的对话框hasmask icon --检查已有模块是否有封装的图标iconedi t --使用ginpu t函数来设计模块图标maskpop ups --返回并改变封装模块的弹出菜单项movemas k --重建内置封装模块为封装的子模块诊断命令:sllastd iagnos tic --上一次诊断信息sllaste rror --上一次错误信息sllastw arning--上一次警告信息sldiagn ostics--为一个模型获取模块的数目和编译状态硬拷贝和打印命令:frameed it --编辑打印画面print --将simuli nk系统打印成图片,或将图片保存为m文件 printop t --打印机默认设置orient--设置纸张的方向-----------------------------------------------------------------------------附件包含好多s imulin k的例程,对于初学者和高手都需要的东西,大家多多支持作者:mikle 发表时间:2008-8-18 12:15:00第1楼模块名 (Sourcelibrary) 用途Band_Li mitedWhite Noise 把白噪声加到连续系统中Chip Signal产生一个频率不断增大的正弦波Clock 显示和提供仿真时间Constan t 产生一个常值Digital Clock 在规定的采样间隔产生仿真时间From File 从文件读取数据From Workspa ce 从工作面上定义的矩阵中读数据Pulse Generat or 在固定的时间间隔产生脉冲RandomNumber产生正态分布的随机数Repeati ng Sequenc e 产生规律重复的任意信号SignalGenerat or 产生各种不同的波形Sine Wave 产生一个正弦波Step Input 产生一个阶跃函数模块名 (Sinks library) 用途Auto_Sc ale Graph Scope 在MATLAB自动调整显示比例的图形窗口显示信号Graph Scope 在MATLAB图形窗口显示信号Hit Crossin g 在规定值附近增加仿真步数Scope 在仿真过程中显示信号Stop Simulat ion 当输入不为零时停止仿真To File 把数据输出到文件中To Workspa ce 把数据输出到工作面上定义的一个矩阵中XY Graph Scope 在MATLAB图形窗口中显示信号的X—Y图模块名 (Discret e library) 用途Discret e-Time Integra tor 对一个信号进行离散积分Discret e-Time Limited Integra tor 对一个信号进行离散有限积分Discret e State-Space 建立一个离散状态空间模型Discret e Transfe r Fcn 建立一个离散传递函数Discret e Zero-Pole 以零极点形式建立一个离散传递函数Filter建立IIR和F IR滤波器First-Order Hold 建立一阶采样保持器Unit Delay 对一个信号延迟一个采样周期Zero-Order Hold 建立一个采样周期的零阶保持器模块名 (Linearlibrary) 用途Derivat ive 对输入信号进行微分Gain 对输入信号乘上一个常数增益Inner Product对输入信号进行点积Integra tor 对输入信号进行积分MatrixGain 对输入信号乘上一个矩阵增益SliderGain 以滑动形式改变增益State-Space 建立一个线性状态空间模型Sum 对输入信号进行求和Transfe r Fcn 建立一个线性传递函数Zero-Pole 以零极点形式建立一个传递函数模块名 (Nonline ar library) 用途Abs 输出输入信号的绝对值Backlas h 用放映的方式模仿一个系统的特性Combina torial建立一张真值表Coulomb ic Frictio n 在原点不连续而在原点以外具有线性增益Dead Zone 提供一个死区Fcn 对输入进行规定的表示Limited Integra tor 在规定的范围内进行积分Logical Operato r 对输入进行规定的逻辑运算Look-up Table 对输入进行分段的线性映射MATLABFcn 定义一个函数对输入信号进行处理Memory输出本模块上一步的输入值Product对输入信号进行乘积运算Quantiz er 对输入信号进行量化处理Rate Limiter限制信号的变化速率Relatio nal Operato r 对输入进行一定的关系运算Relay 在两个值中轮流输出Reset Integra tor 在仿真中对积分器进行重新初始化Saturat ion 对输入信号进行限幅Sign 符号函数Swith 在两个输入之间进行开关Transpo rt Delay 对输入信号进行一定的延迟2-D Look-Up Table 对两个输入信号进行分段的线性映射Variabl e Transpo rt Delay 对输入信号进行不定量的延迟模块名 (Connect ions library) 用途Demux 把向量信号分开输出Inport给系统提供一个外部输出Mux 把几个信号合并成向量形式Outport给系统规定一个输出Subsyst em 表示一个系统在另外一个系统中作者:mikle 发表时间:2008-8-18 12:58:00第2楼simulin k常见问题集锦:命令行如何运行simuli nk外部模式build和start用sim()函数该函数的调用格式为:[t,x,y]=sim(f1,tspan,options,ut)其中f1为SI MULINK的模型名,tspan为仿真时间控制变量;参数optio ns为模型控制参数;ut为外部输入向量。
Simulink 问题集锦

Simulink 问题集锦1 用simlink画的图,在示波器中显示,如何复制到word中告诉你一个办法,在加上示波器的地方加上to workspace改为array在主窗口中plot直接抓过去也行吧。
Edit下有copy model选项2 simulink中的mask问题请问如何封装prompt,varible填啥如何初始化prompt中,填写变量的提示,如:直线斜率variable中填写变量名.如:k3 一个关于simulink仿真的问题根据4个输出a1、a2、a3、a4判断,输出最大的ai所对应的数。
这样一个过程不用s函数能不能实现阿?我用了if else语句,但是无法把不同时刻的不同输出值汇总成串行数据流输出。
用mux将各路信号构造成向量信号,再用matlab fcn下的max对之进行操作即可4 请教:怎样能查到仿真块的程序?simulink自带的模块如果不是mask的就查不了5 为什么用SUMULINK里to file模块中的数据传不到M文件?需要设置什么?是写入.mat中的。
用load命令读入到workspace。
6 MATLAB里得NOTBOOK是做什么用的?MATLAB与WORD的连接,只要在命令窗口中输入:notebook -setup 按照提示就可完成设置7 如何把编好的s-function加到simulink中去。
将S-FUNCTION模块拖到SIMULINK下,将模块名与S-FUNCTION一致,M文件不要求编译,C文件要编译8 仿真示波器中的黑色背景能否处理?想处理示波器的背景一般是想得到图片,最好把数据存到工作空间中,用plot绘图,这样的灵活性会更大9 请问如何用simulink进行变参数系统仿真?就是说,仿真参数会随输出的值不同而发生变化,不再是个常数;而且对于输出(阶跃函数为输入)的每一点都要进行判断,如在某一范围内就计算并调整参数,如在另一范围内就重新计算并调整参数。
matlabsimulink中的执行顺序问题
matlabsimulink中的执⾏顺序问题
关于在simulink中开发⼀些硬件环境模型,有时候会碰到⼀些模块的执⾏先后顺序问题。
⽐如说在⼀个通过UDP发送指令命令给客户端,要求发送的指令有先后的时间顺序,只有在前⼀条命令发送完以后,才可以进⾏下⼀条的命令发送。
这时候会有⼀个问题,simulink是⼀个图形化的开发平台,他不像C、C++、JAVA那样是代码开发,它的模型开发过程中,没有⼀个执⾏的先后过程。
在同⼀个模型下,所有在同⼀级的模块都默认是同时执⾏的(当然,执⾏过程中,由于运算的快慢,有的模块会抢先执⾏)。
在代码开发程序执⾏过程中,总是按照源⽂件⽂本的先后顺序,从上到下执⾏代码,即代码源程序是默认时间执⾏顺序的。
那么,为了能够在simulink中顺序执⾏模块,我有两种思路:
第⼀种:根据模块的优先级顺序执⾏
在simulink中,每个模块都可以为其分配⼀个优先级,该优先级是⼀个从0开始的整数,优先级越低,其会先执⾏。
这样可以保证执⾏顺序。
做法:在要分配执⾏优先级的模块上,右键单击,选择block property,在priority(优先级)中填写定义的优先级值。
注意:该优先级只在存在优先级值的模块之间发挥作⽤,对于没有优先级值的模块,不能保证有优先级值的模块运⾏⼀定⽐没有优先级值的模块快。
第⼆种:为每⼀个模块设置⼀个使能开关,只有当达到预定的值的时候,才让指定模块使能
可以利⽤变量分配模块,分配⼀个变量,专门⽤来指定哪⼀个模块执⾏。
当⼀个模块执⾏完后,让该变量加1,达到下⼀个使能预定值,以进⾏下⼀个的指定模块运⾏,并同时禁⽤其他模块。
simulink有关问题解答
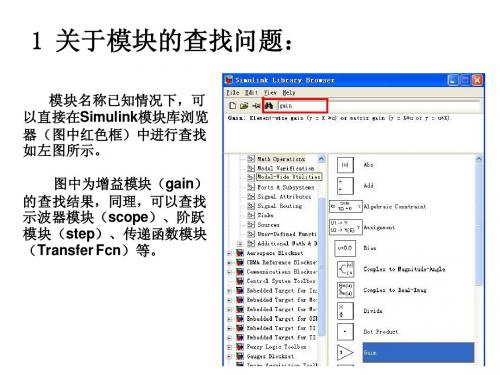
1 关于模块的查找问题:
模块名称已知情况下,可 以直接在Simulink模块库浏览 器(图中红色框)中进行查找 如左图所示。 图中为增益模块(gain) 的查找结果,同理,可以查找 示波器模块(scope)、阶跃 模块(step)、传递函数模块 (Transfer Fcn)等。
运行仿真模型
举例:例子中仿真时间设置为“100s”较合适,为画图方便, 产生数据数为100+1=101个(0s产生一个点),运行仿真模 型。
在运行完仿真模型后,回到Matlab的Workspace窗口, 能看到变量pid123,此变量为101个Y轴数据点,画成一个曲 线图还需要101个时间点做为X轴的点(x、y轴的点数要相等)。 在命令行中输入:>> T=0:1:100; 此时,在工作空间中多了一个变量T, 正好101个点,如右图。
2 关于Simulink模块翻转问题:
模块未经翻转的模型图
模块翻转后的模型图
模块翻转步骤
模块翻转步骤为:右键点击需翻转模块 Format Flip Block。
3 关于Simulink示波器显示范围问题:
曲线幅度超过显示范围
经调整的示波器显示曲线
左图中的曲线超过了显示画面范围,通过按右图中红 色框内的按钮“自动尺度”来进行调整,调整结果如右图 所示。
6 如何用Plot命令画示波器曲线:
(1) 导出示波器数据
如上图导出示波器数据需要用到“to workspace”模块, 如何查找此模块见问题1,连接方式如图中黄色模块。
simulink面试常见问题

simulink面试常见问题
在Simulink面试中,面试官可能会问到以下一些常见问题:
1. 能否简述一下Simulink的主要功能和优点?
2. 能否解释一下Simulink中的模块和连接方式?
3. 如何使用Simulink进行模型建立和仿真?
4. 在Simulink中如何处理噪声数据?
5. 能否举一个你曾经使用Simulink解决过的具体问题?
6. 在使用Simulink进行模型建立和仿真时,如何进行优化和调试?
7. 你如何评估Simulink模型的性能?
8. 如果需要与其他软件或硬件进行集成,你会如何使用Simulink进行实现?
9. 在处理复杂模型或大规模数据时,你通常会使用哪些技术和工具来提高效率和准确性?
10. 你如何保证Simulink模型的正确性和可靠性?。
simulink 解答

MATLAB Simulink中的积分环节在运行过程中怎么清零?程序的方式也可以,要实现的功能是积分值达到一定值后,将积分值清零,重新开始积分? 不多说,直接上图。
积分值100,清理值5。
很简单,你只要在积分器设置里面做两项工作,第一,把“External reset”选成rising,积分器会打开一个端口,这个端口就是用来接收外部清零的条件的;第二把“show state port”打开,这个端口其实输出的就是积分值,但是它只能用于积分的清零,不能作为输出;积分器会出现两个新的端口,一个输出state port,一个输入external reset。
举例说,如果自变量我们取t,初条件是积分值为0.清零条件是积分值达到50,这样我们就从state port里引出来一条线和50做减法,然后输出线连到积分器的输入端,这个过程意思就是设定积分到50的时候就清零,表达式为1/2 * t^2 - 50 之所以最初把外部重设条件设为rising 是因为一开始t=0时,表达式为-50,随着t的增长,当t=10的时候,整个表达式由负变正,相当于上升过零。
这样运行仿真你就看到积分结果不停地到0就重置。
如果仿真时间设的很长,则可能后来就发散了,这样你可以变换一下求解器,选个不同的比如ode15s,收敛的比较好~ 具体为啥我现在也不知道~~希望对你有帮助一、代数环的问题在数字计算中,输入信号决定输出信号,同时输出信号也决定输入信号,由于数字计算的时序性,导致没有输出信号无法计算输入信号,没有输入信号又反过来无法计算输出信号,形成一个死锁(deadlo ck)或死循环,这就是代数环。
如下图1所示,就是一个简单的代数环的例子。
图1、一个简单的代数环的例子二、代数环产生的条件简单地说,代数环其实就是一个输入信号包含输出信号,同时输出信号也包含输入信号的特殊反馈回路。
在simulink中,这是由于直通模块(无延时的模块)的原因造成的,simulink中大部分的模块都是直通模块,因此很容易形成代数环。
simulink中has a syntax error

simulink中has a syntax error摘要:1.Simulink简介2.Simulink中的语法错误3.语法错误的解决方法正文:Simulink是一种基于MATLAB的图形化仿真环境,广泛应用于建模、仿真和分析动态系统。
它提供了丰富的图形化组件,使得用户可以直观地搭建和修改系统模型。
然而,在使用Simulink时,可能会遇到语法错误,导致模型无法正常运行。
本文将简要介绍Simulink中的语法错误,并提供相应的解决方法。
首先,我们需要了解Simulink中的语法错误。
语法错误通常是由于代码编写不规范或不符合Simulink的语法要求而导致的。
这些错误可能包括拼写错误、缺少括号、引号或不正确的语法结构等。
语法错误通常会在模型编译时被捕捉到,并给出相应的错误提示。
要解决语法错误,我们需要仔细阅读错误提示,理解错误原因,并相应地修改代码。
要解决Simulink中的语法错误,可以尝试以下方法:1.仔细阅读错误提示:错误提示通常会指出具体的错误位置和错误原因,这将有助于我们快速定位问题。
2.检查代码规范:确保代码遵循Simulink的语法规范,例如正确使用括号、引号等。
此外,确保所有变量和函数名都正确拼写。
3.逐步排除问题:如果无法立即找到错误原因,可以尝试逐步排除问题。
首先,可以尝试删除部分代码,逐步缩小问题范围,以便更容易地找到错误。
4.参考示例模型:如果仍然无法解决问题,可以参考Simulink自带的示例模型,了解正确的代码编写方式。
5.寻求帮助:如果尝试了以上方法仍然无法解决问题,可以考虑寻求帮助。
这可以包括查阅相关文档、在线论坛或联系Simulink技术支持。
总之,在使用Simulink时,遇到语法错误是正常现象。
要解决这些问题,我们需要仔细阅读错误提示,检查代码规范,并逐步排除问题。
如果仍然无法解决,可以寻求帮助。
simulink小问题集锦

SIMULINK小问题集锦二(转帖)(2009-12-02 20:29:22)转载标签:教育如何在SIMULINK中实现u=u/max(u)没法实现,因为u在仿真前没有,无从建立最大值----------------------------------------------------------------------如何在SIMULINK中取出状态变量?可以存入文件,然后导入.---------------------------------------------------------------------请问如何用simulink进行变参数系统仿真?就是说,仿真参数会随输出的值不同而发生变化,不再是个常数;而且对于输出(阶跃函数为输入)的每一点都要进行判断,如在某一范围内就计算并调整参数,如在另一范围内就重新计算并调整参数。
系统为多输入的比较负载的传度函数,能告诉我如何仿真吗?谢谢!用离散的仿真形式,各环节都用变量或者函数实现参数时变的线性五阶系统在MATLAB中应该怎样仿真?(用mdl文件可以做?还是用S 函数?或者离散形式做成m文件仿真?)其中参数的变化规律是已知的,哪位高人帮我解决一下这个问题,深表感谢可以自己用simulink模块搭建,不一定非得用s函数,参考一下传递函数的状态方程实现内容,可以选择一组积分器,再搭建模型------------------------------------------------------------------------在matlab中,用M文件的形式编写了S-function,请问怎么把他变成自己的仿真模块, 其中有什么注意事项.只需用S-function模块,打开它并在其中设置上你编写的S-function模块的函数名和参数,就可以直接使用了-------------------------------------------------------------------------本人在用simulink仿真某电机控制系统时,需要一整流桥模型input:ua,ub ucoutput:ia,ib,ic简单的二极管模型,很难传递数据,因此本人编程M函数并通过。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 在变步长算法中,步长大小与信号变化快慢反向 相关。 • 容许误差限的作用是控制计算精度。当误差超过 容许误差限时会自动修正步长。在迭代的每一步 (不妨设是第i次迭代),程序都会将计算出来的值 与期望值相见得出一个误差e(i),若e(i)满足: e(i)<=max(相对容许误差限*|y(i)|, 绝对容许误差 限),则表明第i次迭代是正确的,否则,程序会自 动将步长减小,再来验证上述不等式是否成立。 重复上述过程,直到上述不等式成立为止。
• Initial step size(初始步长参数):一般建议使用“auto” 默认值即可。 仿真精度的定义(对于变步长模式) Relative tolerance(相对误差):它是指误差相对于状态 的值,是一个百分比,缺省值为1e-3,表示状态的计算值 要精确到0.1%。 Absolute tolerance(绝对误差):表示误差值的门限, 或者是说在状态值为零的情况下,可以接受的误差。如果 它被设成了auto,那么simulink为每一个状态设置初始绝 对误差为1e-6。 •
•
•
五、关于两种信号
• Simulink 和PSB 两种信号,前者的连线代 表着信号流的方向,后者则仅代表电气上 的连接 • 两种模块连接时必须要进行信号的转换, 可用电压测量模块和受控电流源模块来实 现两种信号之间的转换。
六、示波器多曲线识别
• Displaying Multiple Signals with the Scope Block • When displaying a vector or matrix signal on the same axis, the Scope block assigns colors to each signal element, in this order: • 示波器中的显示顺序 • Yellow • Magenta紫红,洋红色 • Cyan蓝绿,青色 • Red • Green • Dark Blue
七、Scope背景色设置
• 在matlab命令窗口运行下面两条命令: • set(0,'ShowHiddenHandles','on'); set(gcf,'menubar','figure'); • 之后scope会出现相应的菜单,然后edit>figure property,即可修改scope背景色 • 需要点击axis,然后修改colors • 对于scope中输出曲线的颜色,直接在 scope相应的曲线,即会弹出其属性设置窗, 从而设置曲线颜色。
多步法;Adams算法;高低 精度均可到 10-3~10-6 计算时间比 ode45 短
ode23t ode15s ode23s
适度刚性 采用梯形算法 刚性 刚性 多步法;Gear’s 反向数值微 分;精度中等 单步法;2 阶Rosebrock 算 法;低精度 梯形算法;低精度
适度刚性情形 若 ode45 失效时,可 尝试使用 当精度较低时,计算 时间比 ode15s 短 当精度较低时,计算 时间比ode15s短
• 当求解类型是”Variable-step”时,有以下选项: • 1”Max step size”——最大步长,若为auto,则最大 步长位(Stop time-Start time)/50。 • 2”Min step size”——最小步长。 • 3”Initial step size”——初始步长。 • 4”Relative tolerance”——设置相对容许误差限。 • 5”Absolute tolerance”——设置绝对容许误差限。
电力电子
三、关于求解器(solver)
• 一个适当算法的选择,可以有效的缩短仿 真时间和提供仿真的精度。
求解器
ode45
ODE类 型
非方法; 大部分场合的首选方 累计截断误差为 (△x)3 法
ode23
ode113
非刚性
非刚性
单步法;2,3 阶 R-K 方法; 使用于精度较低的情 累计截断误差为 (△x)3 形
生活中
宇航技术
• 宇航飞行器自动控制系统一般包含两个相 互作用但效应速度相差十分悬殊的子系统 • 一个是控制飞行器质心运动的系统,当飞 行器速度较大时,质心运动惯性较大,因 而相对来说变化缓慢; • 另一个是控制飞行器运动姿态的系统,由 于惯性小,相对来说变化很快,因而整个 系统就是一个刚性系统。
八、建模与结果输出
• • 元件的布局尽量合理、美观、整齐 一定要养成符合实际电路实验时,搭建电路的 习惯,先完成主电路,再连接测量元件。测量 电流和电压的元件,以及示波器等虚拟设备, 不要当成电路的一部分。 模型拷贝:edit>copy mode to clipboard,和输 出波形拷贝的方法。当然均可以采用屏幕打印 (printscreen)的方式。 波形输出
一、Simulink的工作原理
• 我们在Simulink中连线的过程实际上是定义 微分(差分)方程(组)的过程。而仿真 则是求微分(差分)方程(组)数值解的 过程。
二、关于刚性问题(stiff)
什么是刚性问题? 在用微分方程描述的一个变化过程中,若往往又包含 着多个相互作用但变化速度相差十分悬殊的子过程, 这样一类过程就认为具有 “刚性”。描述这类过程的 微分方程初值问题称为“刚性问题”。
ode23tb 刚性
• 如果模型全部是离散的,则对于变步长和 定步长,解法都采用discrete方式。 • ode45和ode23实际上都是采用RungeKutta法,而ode23达到同样的精度时要比 ode45步长小。 • ode23s和ode15s可以解Stiff方程。 • ode113是变阶的Adams法,可以多步预报 校正。
• continuous和discrete两种状态的主要差别 在于他们取值的时间问题,既在continuous 中,理论是无间隔 时间,计算机的做法可 能是很短时间内更新一次值,而discrete则 是很长时间更新一次值,这个很短和很长 的概念是他两相对来说的。 • 离散系统采用差分方程表示,和前一时刻 的状态有关,所以必须知道先前状态连续 系统采用微分方程描述 。
四、关于仿真参数配置
• 仿真时间 • 仿真时间:注意这里的时间概念与真实的 时间并不一样,只是计算机仿真中对时间 的一种表示,比如10秒的仿真时间,如果 采样步长定为0.1,则需要执行100步,若 把步长减小,则采样点数增加,那么实际 的执行时间就会增加。
• “Type”:设置微分(差分)方程求解类 型,”Variable-step”表示采用变步长算 法。”Fixed-step”表示采用定步长算法。