plc之间以太网通信
PLCEthernet通信通讯资料

PLC Ethenet通讯一、总则:提高设备互联互通,自我诊断修复能力。
二、设备互联标准2.1 设备控制器选用要求PLC必须带有以太网接口,支持TCP/IP协议,网速10M/100M自适应。
2.1.1 制造商选择范围PLC: 三菱,型号可选FX3GE; FX3UC+FX3U-ENET-ADP; FX3U+FX3U-CNV-BD+FX3U-ENET-ADP; FX5系列; Q03; Q04; Q06; Q12带有以太网接口的PLC。
嵌入式控制器:BACKHOFF。
型号CX90x0或CX50x0系列。
2.1.2通讯协议三菱PLC FX3系列用MC协议。
三菱FX5和Q PLC用SLMP协议。
BACKHOFF嵌入式控制器用ADS协议。
2.1.3控制系统布局与布线。
一个系统(机器)只有一个主控PLC或嵌入式主控制器。
当系统多个机柜时,只有一个机柜装主控制器,其它机柜只能装分布式I/O模块或从站模块。
分布式I/O模块或从站模块仅用于读取本机台传感器信号及控制本机台执行机构。
严禁跨机柜接传感器和执行机构控制线。
分布式I/O模块和主控制器之间用总线通讯方式,以方便机台的拆分和组装。
2.1.3.1 三菱PLC系统Q系列:此系列属于中大型PLC,最大点数可达4096点,可用于多机柜(最多支持7个)分布式控制系统中。
系统结构如下图1所示。
注意:扩展电线总长不要超过13.2米。
图1 三菱Q系列PLC控制系统结构FX系列:此系列属于小型PLC 。
FX3GA、FX3GC、FX3GE控制规模128点,使用CC-link远程I/O可达256点。
FX3U及FX3UC控制规模256点,使用CC-link远程I/O可达384点。
FX系列PLC用于单机柜或双机柜设备中,不得用于三机柜及以上的设备中。
跨机柜的控制线必须是接线线端子台电缆线或CC-LINK总线。
I/O线不得跨机柜串接。
FX3GA、FX3GC必须加装FX3U-CNV-BD转换模块和FX3U-ENET-ADP以太网模块,才能接MES.IQ-F系列:此系列控制规模256点,使用CC-link远程I/O可达512点。
plc和以太网通讯协议
竭诚为您提供优质文档/双击可除plc和以太网通讯协议篇一:西门子s7-1200与s7-300plc的以太网tcp及isoontcp通信1.概述1.1s7-1200的pRoFinet通信口s7-1200cpu本体上集成了一个pRoFinet通信口,支持以太网和基于tcp/ip的通信标准。
使用这个通信口可以实现s7-1200cpu与编程设备的通信,与hmi触摸屏的通信,以及与其它cpu之间的通信。
这个pRoFinet物理接口是支持10/100mb/s的Rj45口,支持电缆交叉自适应,因此一个标准的或是交叉的以太网线都可以用于这个接口。
1.2s7-1200支持的协议和最大的连接资源s7-1200cpu的pRoFinet通信口支持以下通信协议及服务tcpisoontcp(RcF1006)s7通信(服务器端)通信口所支持的最大通信连接数s7-1200cpupRoFinet通信口所支持的最大通信连接数如下:3个连接用于hmi(触摸屏)与cpu的通信1个连接用于编程设备(pg)与cpu的通信8个连接用于openie(tcp,isoontcp)的编程通信,使用t-block指令来实现3个连接用于s7通信的服务器端连接,可以实现与s7-200,s7-300以及s7-400的以太网s7通信s7-1200cpu可以同时支持以上15个通信连接,这些连接数是固定不变的,不能自定义。
tcp (transportconnectionprotocol)tcp是由RFc793描述的标准协议,可以在通信对象间建立稳定、安全的服务连接。
如果数据用tcp协议来传输,传输的形式是数据流,没有传输长度及信息帧的起始、结束信息。
在以数据流的方式传输时接收方不知道一条信息的结束和下一条信息的开始。
因此,发送方必须确定信息的结构让接收方能够识别。
在多数情况下tcp应用了ip(internetprotocol),也就是“tcp/ip协议”,它位于iso-osi参考模型的第四层。
S7-300之间的以太网通信
S7-300PLC之间的工业以太网通信在生产现场,用户还会遇到S7-300的PLC组成小型的局域网实现互相通信的情况。
为了解决这个问题,我们先采用2台CPU 315-2PN/DP通过建立S7连接来说明两台S7-300PLC 的工业以太网的组网技术。
1.西门子工业以太网通信方式简介工业以太网的通信主要利用第二层(ISO)和第四层(TCP)的协议。
以下是西门子以太网的几种通信方式。
(1)ISOTransport (ISO传输协议)ISO传输协议支持基于ISO的发送和接收,使得设备在工业以太网上的通信非常容易,该服务支持大数据量的数据传输(最大8KB)。
ISO数据接收有通信方确认,通过功能块可以看到确认信息。
用于SIMA TIC S5和SIMATIC S7的工业以太网连接。
(2)ISO-on-TCPISO-on-TCP支持第四层TCP/IP协议的开放数据通信。
用于支持SIMA TIC S7和PC以及非西门子支持的TCP/IP以太网系统。
ISO-on-TCP符合TCP/IP,但相对于标准的TCP/IP,还附加了RFC 1006协议,RFC 1006是一个标准协议,该协议描述了如何将ISO映射到TCP 上去。
(3)UDPUDP(User Datagram Protocol, 用户数据报协议),属于第四层协议,提供了S5兼容通信协议,适用于简单的、交叉网络的数据传输,没有数据确认报文,不检测数据传输的正确性。
UDP支持基于UDP的发送和接收,使得设备(例如PC或非西门子公司设备)在工业以太网上的通信非常容易。
该协议支持较大数据量的数据传输(最大2KB),数据可以通过工业以太网上或TCP/IP网络(拨号网络或因特网)传输。
通过UDP,SIMATIC S7 通过建立UDP连接,提供了发送/接收通信功能,与TCP不同,UDP实际上并没有在通信双方建立一个固定的连接。
(4)TCP/IPTCP/IP 中传输控制协议,支持第四层TCP/IP协议的开放数据通信。
工业网络通信及组态技术--S7-1200与S7-300之间的以太网通信

图4-29 添加连接
图4-30 建立 S7 连接
“S7_Connection_1”为建立的连接,选中连接,在属性的“General”条目中定义连接对方 S7-1200PN 口的IP地 址,如下图4-31所示;
图4-31 定义连接对方的 IP 地址
定义通讯双方的 TSAP 号,如图4-32所示;连接 ID 号,如图4-33所示。 注意:S7-1200预留给S7连接两个TSAP地址:03.01和03.00
图4-22 建立 S7 连接
图4-23 定义连接对方的 IP 地址
定义通讯双方的 TSAP 号,如图4-24所示;连接 ID 号,如图4-25所示;注意:S7-300 预留给 S7 连接 TSAP 地址:03.02;如果通信伙伴是 S7-400 ,则要根据 CPU 槽位来决定 TSAP 地址,例如: CPU400 在 3 号槽,则 TSAP 地址为 03.03。
任务描述
(2)当S7-300作为客户端,S7-1200作为服务器,需在客户端单边 组态连接和编程,而作为服务器端的S7-1200只需准备好通信的数据 以及V4.0版本以上CPU需要激活连接机制。所完成的通信任务: ① S7-300 CPU 读取 S7-1200 CPU中 DB1 的数据到 S7-300 的 DB3 中。 ② S7-300 CPU 将本地 DB4 中的数据写到 S7-1200 CPU中 DB2 中。
图4-24 定义通讯双方的 TSAP 号 配置完网络连接,如图4-26所示,编译保存并下载。
图4-25 连接 ID 号 图4-26 通讯连接状态
(3)软件编程
在OB1中,从“Instruction” >“Communication” >“S7 Communication”下,调用 Get、Put 通信指令,创建接收和 发送数据块 DB3 和 DB4,定义成 101个字节的数组,程序调用如下图4-27所示。
S7-300 与 S7-200 SMART 以太网通讯
1.1硬件组态
1.1.1新建项目
首先单击新建项目,名称和存储位置可以自己选择和更改,然后点击确认。如图3所示。
图3新建项目
1.1.2建立SMATC 300站点。
块
S7-400
块
S7-300
描述
简要描述
SFB 14
FB 14
读数据
单边编程读访问。
SFB 15
FB 15
写数据
单边编程读访问。
表1
图1调用通信项目功能块
图2调用通信系统功能块
要通过S7-300/400 CPU的集成PROFINET接口实现S7通信,需要在硬件组态中建立连
接。
1、硬件及网络组态
CPU采用1个314-2PN/DP,1个S7-200 SMART PLC使用以太网进行通信。
连接伙伴选择(未指定),站点(未指定),连接类型选择S7连接。然后点击应用进入S7连接属性设置窗口。如图23所示。
(英文版选择(选择Unspecified站点,选择通讯协议S7 connection,点击Apply))
图23插入新连接
本地连接端点选择,勾选建立主动连接,块参数设置,自定义本地ID,默认是1,连接路径栏不用修改,伙伴栏在[Industrial Etherent(工业以太网)]栏键入SMART S7-200 SMART的IP地址。然后点击地址详细信息,
(英文版选择点击Address Details,再弹出来的对话框设置Partner的Slot为1,如图8所示。点击OK即可关闭该对话框)
图25修改伙伴插槽号
plc与pLC网口通讯
plc与pLC网口通讯近年来,随着工业自动化的快速发展,PLC(可编程逻辑控制器)成为了现代工业中不可或缺的设备。
PLC通过控制输入输出模块,实现对工业生产过程的控制和监控。
而PLC网口通讯,则是将多个PLC设备通过网络连接,实现信息的共享和协同工作。
本文就PLC与PLC网口通讯的相关内容进行深入的探讨。
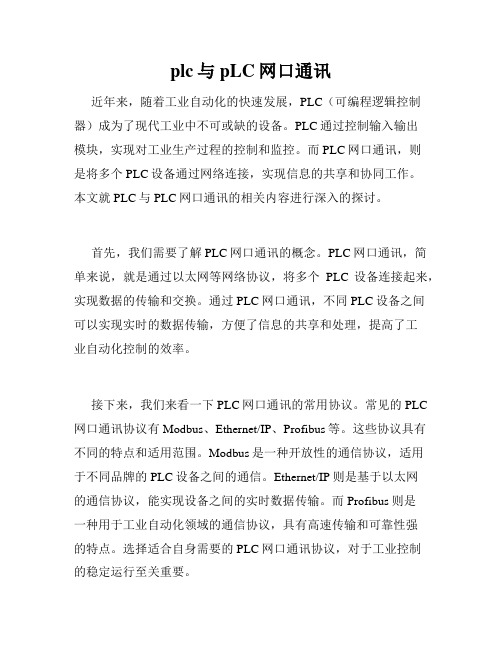
首先,我们需要了解PLC网口通讯的概念。
PLC网口通讯,简单来说,就是通过以太网等网络协议,将多个PLC设备连接起来,实现数据的传输和交换。
通过PLC网口通讯,不同PLC设备之间可以实现实时的数据传输,方便了信息的共享和处理,提高了工业自动化控制的效率。
接下来,我们来看一下PLC网口通讯的常用协议。
常见的PLC 网口通讯协议有Modbus、Ethernet/IP、Profibus等。
这些协议具有不同的特点和适用范围。
Modbus是一种开放性的通信协议,适用于不同品牌的PLC设备之间的通信。
Ethernet/IP则是基于以太网的通信协议,能实现设备之间的实时数据传输。
而Profibus则是一种用于工业自动化领域的通信协议,具有高速传输和可靠性强的特点。
选择适合自身需要的PLC网口通讯协议,对于工业控制的稳定运行至关重要。
除了协议选择,PLC网口通讯的配置也是非常重要的。
在进行PLC网口通讯时,我们需要为每个PLC设备配置独立的IP地址,确保设备之间能够正常交换数据。
同时,要确保网络的稳定性和安全性,防止数据丢失和非法入侵。
此外,PLC网口通讯的性能也需要进行测试和优化,以确保通讯的稳定和可靠。
笔者在实际工作中遇到过一个案例,让我们更加深入了解PLC 网口通讯的重要性。
某工业企业使用PLC控制多台设备运行,实现生产过程的自动化。
但是由于PLC之间没有进行网口通讯,每次出现异常时都需要人工干预,导致生产效率低下。
为了解决这个问题,我们进行了PLC网口通讯的配置和优化。
通过将多台PLC设备连接到网络上,实现了实时的数据共享和远程监控。
plc网口通讯有哪几种

plc网口通讯有哪几种PLC(Programmable Logic Controller)是一种常用于工业自动化控制系统的设备。
在PLC中,网口通讯是一种常见且重要的通讯方式。
本文将介绍PLC网口通讯的几种常见形式和原理。
1. 以太网通讯以太网通讯是最常见的PLC网口通讯方式之一。
它利用Ethernet技术,通过TCP/IP协议实现数据的传输和通信。
以太网通讯具有传输速度快、稳定可靠的特点,能够满足大规模工控网络通讯的需求。
它广泛应用于工业领域,如生产线控制、数据采集与监控等方面。
2. 串口通讯串口通讯是一种经典的PLC通讯方式,常用于早期的PLC设备。
串口通讯包括RS-232、RS-422和RS-485等标准。
其中,RS-485在工业环境中应用较多,具有抗干扰能力强的特点。
串口通讯速度相对较慢,但适用于简单的数据传输和控制任务。
3. CAN总线通讯CAN(Controller Area Network)总线通讯是一种常用于工业自动化和汽车电子领域的通讯方式。
它具有高可靠性、实时性强和抗干扰能力强的特点。
在PLC中,CAN总线通讯可用于实现分布式控制系统,将多个PLC设备连接在一起,实现数据交换和协同控制。
4. 无线通讯随着无线技术的快速发展,无线通讯在工业自动化领域也得到了广泛的应用。
在PLC中,无线通讯可以通过Wi-Fi、蓝牙、Zigbee等技术实现。
无线通讯可以克服布线困难和距离限制,适用于某些需要移动性和灵活性的应用场景。
5. 工业以太网通讯工业以太网通讯是一种专门用于工业环境的以太网方案。
它基于IEEE 802.3和TCP/UDP协议,提供了对实时性、可靠性和安全性的支持。
工业以太网通讯可满足工控网络的高要求,如实时数据采集、远程监控和精确控制等。
总结:PLC网口通讯的几种常见形式包括以太网通讯、串口通讯、CAN总线通讯、无线通讯和工业以太网通讯。
这些通讯方式各有特点,适用于不同的应用场景。
plc通讯 以太网口
plc通讯以太网口当谈到自动化控制系统时,不得不提到PLC(可编程逻辑控制器)。
作为广泛应用于工业领域的控制设备,PLC的通讯方式起着至关重要的作用。
其中,PLC通讯以太网口被广泛应用,为自动化系统的数据传输提供了高效、可靠的解决方案。
PLC通讯以太网口,简称以太网通讯口,是指在PLC设备上提供的用于连接以太网的接口。
以太网是一种常用的局域网通信协议,基于TCP/IP协议,具有广域网连接能力。
因此,PLC通讯以太网口可以实现与其他设备或系统的高速通讯。
首先,PLC通讯以太网口具备较高的传输速率。
传统的PLC通讯方式如串口、并口等传输速率有限,难以满足如今工业自动化控制系统对高效、即时通讯的需求。
而以太网通讯口的出现,极大提高了PLC与其他设备间的通讯速率。
这使得实时控制变得更加可行,大大降低了数据传输的延迟时间。
其次,PLC通讯以太网口具备较高的稳定性和可靠性。
以太网是一种非常成熟、可靠的通信协议,具备较强的抗干扰能力。
相比于传统的PLC通讯方式,以太网通讯口能够更好地抵御噪声、干扰等外部因素对通讯信号的影响。
这保证了数据传输的稳定性,提高了自动化控制系统的可靠性。
此外,PLC通讯以太网口还具备良好的可扩展性。
现代工业自动化控制系统通常涉及多个设备、多个系统的互联互通。
以太网通讯接口提供了更灵活、可扩展的解决方案。
通过以太网通讯,PLC可以与不同厂家、不同型号的设备进行高效通讯,实现多设备联动控制。
这为工业自动化的集成化发展提供了有力的支持。
在实际应用中,PLC通讯以太网口具有广泛的适用性。
不仅可以与各类工业设备进行通讯,如伺服驱动器、温度传感器等,还可与上位机、数据采集系统进行连接,实现对生产数据的实时监测和分析。
特别值得一提的是,PLC通讯以太网口还支持远程监控和远程操作。
工程师可以通过互联网连接到PLC设备,实时监视设备状态、调整参数,从而实现对设备的远程管理。
然而,与众多的优点相比,PLC通讯以太网口也存在一些挑战和需求。
以太网口与plc通讯是什么协议
以太网口与plc通讯是什么协议在现代工业控制系统中,以太网口与PLC通讯起到了至关重要的作用。
以太网口是一种用于连接网络的物理接口,而PLC (Programmable Logic Controller)是一种可编程逻辑控制器,用于实现工业自动化控制。
那么,以太网口与PLC通讯是通过什么协议来实现的呢?要了解以太网口与PLC通讯的协议,我们首先需要了解两个重要的概念:TCP/IP和OPC。
TCP/IP是传输控制协议/因特网协议(Transmission Control Protocol/Internet Protocol)的简称,它是网络通讯的基础协议。
而OPC则是开放连接性(OLE for Process Control)的简称,是一种用于从不同供应商的硬件设备中获取数据的标准接口。
在以太网口与PLC通讯中,TCP/IP协议扮演着重要的角色。
TCP/IP协议是一种基于分组交换网络的协议,它将数据分割成若干个数据包进行传输,确保数据的可靠传输。
TCP/IP协议提供了一种可靠的数据传输机制,保证了PLC与其他设备之间的通讯的一致性和可靠性。
OPC协议则是建立在TCP/IP协议之上的一种应用层协议。
它定义了一套规范,用于实现不同供应商的PLC之间以及PLC与其他设备之间的数据交换。
通过OPC协议,PLC可以与其他设备进行数据共享和通讯,实现设备之间的无缝连接。
除了TCP/IP和OPC协议之外,以太网口与PLC通讯还可以使用其他协议,如MODBUS、EtherCAT等。
MODBUS是一种用于实现工业自动化通讯的协议,常见于PLC和其他设备之间的通讯。
EtherCAT是一种高性能、实时性强的通讯协议,主要用于工业自动化领域。
不同的协议有不同的特点和适用范围。
选择合适的协议取决于具体的应用场景和需求。
比如,在需要高效、实时的工业自动化控制系统中,可以选择使用EtherCAT协议来实现以太网口与PLC 的通讯。
S7-1200PLC之间TCP通信实例步骤

西门子S7-1200 PLC与PLC之间以太网通信操作心得
1.软件组态:新建两个CPU,在组态界面的网络视图手绘连接两个PLC 的以太网口,如下:
2.在两个CPU以太网口的属性中设置IP地址,设置同一网段,方便调试;
3.在PLC_1程序块中添加一个背景数据块,新建接收数组跟发送数组,以方便存放接收或发送数据,例程如下:
4.在PLC_1主程序中添加一个“通过以太网发送数据”的指令块(发送使能REQ以下案例是通过5HZ的频率触发),并点击属性编辑,编辑好属性后CONNET自动产生,将背景数据块的填入DATA位置,LEN 是数据长度,如下:
4.发送指令的属性编辑如下(连接数据可以直接点击新建,系统自动产生对应的数据指针,其余可以采用默认参数)
5.在PLC_1主程序中添加一个“通过以太网接收数据”的指令块,并点击属性编辑,块参数编辑同上,如下:
6.发送指令的属性编辑同上发送块的属性编辑;
7.以同样的编辑方式编辑PLC_2;
8.在程序段中操作发送数组数据内容,使用接收数组数据内容,只要硬件连接正常,PLC_1与PLC_2可通过对应的数组交换数据。
基于FINS协议的计算机与PLC以太网通信

基于FINS协议的计算机与PLC以太网通信计算机与PLC以太网通信基于FINS协议近年来,计算机与PLC(可编程逻辑控制器)之间的通信变得越来越重要,特别是在工业自动化控制领域。
为了实现高效且可靠的通信,基于FINS(Factory Interface Network Service)协议的计算机与PLC以太网通信逐渐流行起来。
本文将探讨基于FINS协议的计算机与PLC以太网通信的原理、特点以及应用。
一、基于FINS协议的计算机与PLC以太网通信原理基于FINS协议的计算机与PLC以太网通信的原理主要包括以下几个方面:1. 网络连接:首先,计算机和PLC之间需要通过以太网进行连接。
计算机通过以太网与PLC通信模块相连,确保双方能够互相传输数据。
2. FINS协议:FINS协议是由欧姆龙公司开发的一种通信协议,用于实现计算机与PLC之间的数据交互。
该协议支持多种通信方式,例如TCP/IP、UDP等,具有较高的可靠性和灵活性。
3. 数据传输:计算机和PLC之间的数据传输主要通过FINS协议进行。
计算机可以向PLC发送指令,PLC接收指令后执行相应的控制逻辑,并将结果返回给计算机。
另外,计算机还可以获取PLC的实时状态信息,用于监控和调试。
二、基于FINS协议的计算机与PLC以太网通信特点基于FINS协议的计算机与PLC以太网通信具有以下几个特点:1. 高效可靠:FINS协议采用底层的以太网通信方式,具有较高的传输速率和可靠性。
这意味着计算机可以实时地与PLC进行通信,确保控制指令的准确执行。
2. 灵活性强:FINS协议支持多种通信方式,使得计算机与PLC之间的通信更加灵活。
无论是在局域网还是互联网环境下,都可以通过FINS协议实现数据交互,满足不同需求的应用场景。
3. 扩展性好:基于FINS协议的计算机与PLC以太网通信支持多点连接,即一个计算机可以同时连接多个PLC。
这种扩展性的设计可以满足复杂控制系统中多个PLC的通信需求。
S7-300 与 S7-200 SMART 以太网通讯

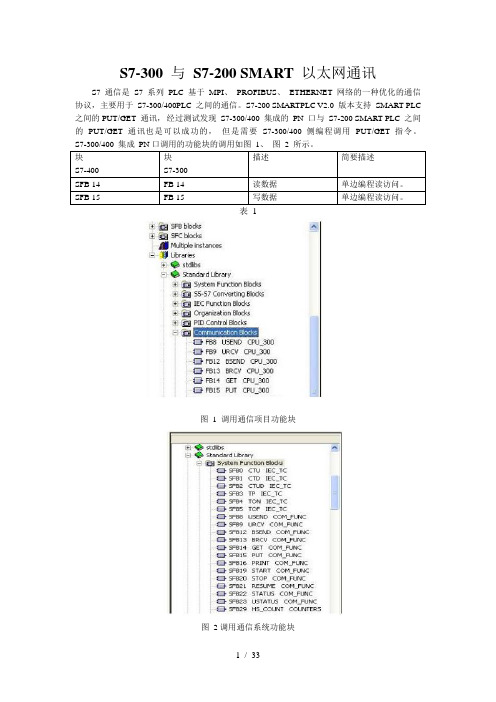
S7-300 与S7-200 SMART 以太网通讯S7 通信是S7 系列PLC 基于MPI、PROFIBUS、ETHERNET 网络的一种优化的通信协议,主要用于S7—300/400PLC 之间的通信。
S7—200 SMARTPLC V2.0 版本支持SMART PLC 之间的PUT/GET 通讯,经过测试发现S7-300/400 集成的PN 口与S7-200 SMART PLC 之间的PUT/GET通讯也是可以成功的,但是需要S7—300/400 侧编程调用PUT/GET 指令. S7-300/400 集成PN口调用的功能块的调用如图1、图2 所示。
块S7-400 块S7-300描述简要描述SFB 14 FB 14 读数据单边编程读访问。
SFB 15 FB 15 写数据单边编程读访问。
表 1图 1 调用通信项目功能块图2调用通信系统功能块要通过S7-300/400 CPU 的集成PROFINET 接口实现S7 通信,需要在硬件组态中建立连接。
1、硬件及网络组态CPU 采用1 个314-2PN/DP,1 个S7-200 SMART PLC 使用以太网进行通信.在STEP7 中创建一个新项目,项目名称为S7-300-SMART。
插入 1 个S7—300 站, 在硬件组态中插入CPU 314-2 PN/DP。
如图3-10 所示。
1.1硬件组态1.1。
1 新建项目首先单击新建项目,名称和存储位置可以自己选择和更改,然后点击确认。
如图 3 所示。
图3新建项目1.1.2 建立SMATC 300站点。
首先在导航窗口空白处(或者选择项目)右键选择插入对象,再选择SMA TC 300站点。
如图4 所示图4 创建SMATC 300站点1。
1.3硬件配置双击右窗口硬件进入硬件配置窗口.具体配置如图5-19所示。
注意:硬件组态的硬件参数必须要和实际的硬件参数相同,否则PLC不能正常工作.出现异常报警.图5 进入硬件配置窗口图6 硬件配置窗口图7选择机架注:(可以右击选择添加或者直接双击进行添加)以下的硬件配置将不予说明。
plc网口通讯方式
plc网口通讯方式近年来,随着工业自动化的快速发展,PLC(Programmable Logic Controller,可编程逻辑控制器)作为一种重要的控制设备,被广泛应用于工业生产中。
而PLC网口通讯方式作为PLC与其他设备进行数据传输的重要手段,也备受瞩目。
本文将探讨几种常见的PLC网口通讯方式。
一、以太网通讯(Ethernet Communication)以太网通讯是目前最常见、最普遍应用的PLC网口通讯方式之一。
PLC通过以太网接口与其他设备(如电脑、HMI、传感器等)进行数据传输。
以太网通讯具有传输速度快、网络拓扑结构多样化等特点,适用于大规模工业自动化控制系统。
二、Modbus通讯Modbus通讯是一种基于串行通信协议的PLC网口通讯方式。
Modbus通讯多用于小规模、简单的工控系统中,其通讯方式简单直接、易于实现和维护。
Modbus通讯协议具有主从架构和数据传送的可靠性,是一种常见的PLC网口通讯方式。
三、Profinet通讯Profinet通讯是一种基于以太网的PLC网口通讯方式。
与以太网通讯相比,Profinet通讯更具实时性和可靠性,适用于一些对数据传输时间要求较高的工控系统。
Profinet通讯还支持分布式控制和故障诊断等功能,提高了系统的稳定性和可用性。
四、CAN通讯CAN通讯是一种主要应用于车辆和机械领域的PLC网口通讯方式。
CAN通讯具有高可靠性、抗干扰能力强等特点,适用于在恶劣环境中使用。
CAN通讯一般采用总线结构,可以实现多个设备之间的数据传输和通信。
五、DeviceNet通讯DeviceNet通讯是一种基于CAN总线的PLC网口通讯方式。
DeviceNet通讯主要用于传感器和执行器等外围设备与PLC之间的数据传输。
DeviceNet通讯具有简化布线、降低成本等优点,适用于小规模工控系统。
六、Profibus通讯Profibus通讯是一种用于PLC网口通讯的开放性通讯协议。
以太网口与plc通讯

以太网口与plc通讯现如今,在工业控制系统中,以太网口与PLC通讯已经成为了一种主流的通信方式。
这种通讯方式的使用,不仅提高了工业自动化系统的可靠性和稳定性,还为企业带来了诸多好处。
本文将探讨以太网口与PLC通讯的原理、应用和未来发展。
一、以太网口与PLC通讯的原理以太网口与PLC通讯是通过以太网协议进行数据传输的方式。
以太网协议是一种开放、通用和标准化的网络协议,它基于TCP/IP协议栈,可以在局域网内实现数据的传输和共享。
而PLC (可编程逻辑控制器)是一种专用的数字计算机,用于控制工业自动化过程。
通过以太网口与PLC通讯,可以实现PLC与其他设备之间的数据交互与共享。
在以太网口与PLC通讯中,常用的通讯方式有两种:基于无线局域网(WLAN)和基于有线局域网(LAN)。
基于WLAN的通讯方式主要使用WiFi技术,可以实现无线的数据传输。
这种方式适用于远距离或信号传输难度较大的环境。
而基于LAN的通讯方式则使用以太网线进行数据传输,适用于距离相对较近、信号传输稳定的环境。
二、以太网口与PLC通讯的应用以太网口与PLC通讯广泛应用于各种工业控制系统中。
其中,常见的应用领域包括工厂自动化、智能建筑、物联网等。
以太网口与PLC通讯的应用,使得工业设备之间的数据交互更加方便快捷。
比如,在工厂自动化系统中,通过以太网口与PLC通讯,可以实现对各种设备的监控和控制。
工人可以通过远程的终端设备,对生产线上的设备进行实时监控和远程控制,提高了工作效率和生产质量。
此外,以太网口与PLC通讯还可以实现设备之间的数据共享和集中管理。
通过搭建一个统一的网络平台,不同的设备可以实现数据的互联互通。
这样,工程师可以通过集中的管理平台,对各个设备的数据进行收集和分析,实时监测设备的状态和运行状况。
三、以太网口与PLC通讯的未来发展随着工业自动化的不断发展,以太网口与PLC通讯在未来的应用前景更加广阔。
首先,以太网口与PLC通讯正在向更高速、更稳定的通讯方式发展。
plc以太网自由口通讯
plc以太网自由口通讯PLC(可编程逻辑控制器)是一种广泛应用于自动化控制系统的设备,而以太网自由口通讯则是在PLC领域中引起了广泛关注的新技术。
本文将以PLC以太网自由口通讯为主题,探讨其背后的原理、优势以及应用前景。
PLC以太网自由口通讯,简称PLC-Ethernet Free Port Communication,是指通过以太网接口实现PLC之间的通讯,从而在自动化控制系统中实现数据的共享和交互。
与传统的PLC通讯方式相比,以太网自由口通讯具有更高的传输速率、更大的数据容量以及更强的稳定性。
其基本原理是通过将PLC设备连接至以太网,然后利用TCP/IP协议实现数据传输和通讯。
首先,PLC以太网自由口通讯具有更高的传输速率。
传统的PLC通讯方式通常采用串行通讯,而以太网自由口通讯则实现了并行通讯,大大提高了数据传输的速度。
这使得在实际应用中,PLC之间的数据交互更加高效,可以实现更高精度的控制和更快速的响应。
其次,PLC以太网自由口通讯有更大的数据容量。
传统的PLC 通讯方式限制了数据的传输量和类型,而以太网自由口通讯可以实现大容量数据的传输。
这对于复杂的自动化系统而言尤为重要,例如工业生产线中的大量传感器数据需要实时传输和处理,以太网自由口通讯可以胜任这一任务。
此外,PLC以太网自由口通讯还具备更强的稳定性。
以太网作为现代网络通讯的基础设施之一,具有高度稳定和可靠性。
通过将PLC设备接入以太网,实现PLC之间的通讯,可以避免由于传统PLC通讯方式中存在的电磁干扰、距离限制等问题所导致的通讯中断和数据丢失。
这对于要求高可靠性的自动化系统尤为重要,如汽车制造、航空航天等领域。
PLC以太网自由口通讯已经在许多领域得到了广泛的应用。
在工业控制领域,PLC以太网自由口通讯可以实现生产线上各个PLC设备之间的信息交换和协同工作,提高生产效率和质量。
在建筑自动化领域,PLC以太网自由口通讯可以实现楼宇对各个设备的集中控制和管理,提高能源利用效率和生活舒适度。
S7-300之间的以太网通信
S7-300PLC之间的工业以太网通信在生产现场,用户还会遇到S7-300的PLC组成小型的局域网实现互相通信的情况。
为了解决这个问题,我们先采用2台CPU 315-2PN/DP通过建立S7连接来说明两台S7-300PLC 的工业以太网的组网技术。
1.西门子工业以太网通信方式简介工业以太网的通信主要利用第二层(ISO)和第四层(TCP)的协议。
以下是西门子以太网的几种通信方式。
(1)ISOTransport (ISO传输协议)ISO传输协议支持基于ISO的发送和接收,使得设备在工业以太网上的通信非常容易,该服务支持大数据量的数据传输(最大8KB)。
ISO数据接收有通信方确认,通过功能块可以看到确认信息。
用于SIMA TIC S5和SIMATIC S7的工业以太网连接。
(2)ISO-on-TCPISO-on-TCP支持第四层TCP/IP协议的开放数据通信。
用于支持SIMA TIC S7和PC以及非西门子支持的TCP/IP以太网系统。
ISO-on-TCP符合TCP/IP,但相对于标准的TCP/IP,还附加了RFC 1006协议,RFC 1006是一个标准协议,该协议描述了如何将ISO映射到TCP 上去。
(3)UDPUDP(User Datagram Protocol, 用户数据报协议),属于第四层协议,提供了S5兼容通信协议,适用于简单的、交叉网络的数据传输,没有数据确认报文,不检测数据传输的正确性。
UDP支持基于UDP的发送和接收,使得设备(例如PC或非西门子公司设备)在工业以太网上的通信非常容易。
该协议支持较大数据量的数据传输(最大2KB),数据可以通过工业以太网上或TCP/IP网络(拨号网络或因特网)传输。
通过UDP,SIMATIC S7 通过建立UDP连接,提供了发送/接收通信功能,与TCP不同,UDP实际上并没有在通信双方建立一个固定的连接。
(4)TCP/IPTCP/IP 中传输控制协议,支持第四层TCP/IP协议的开放数据通信。
以太网通讯方案
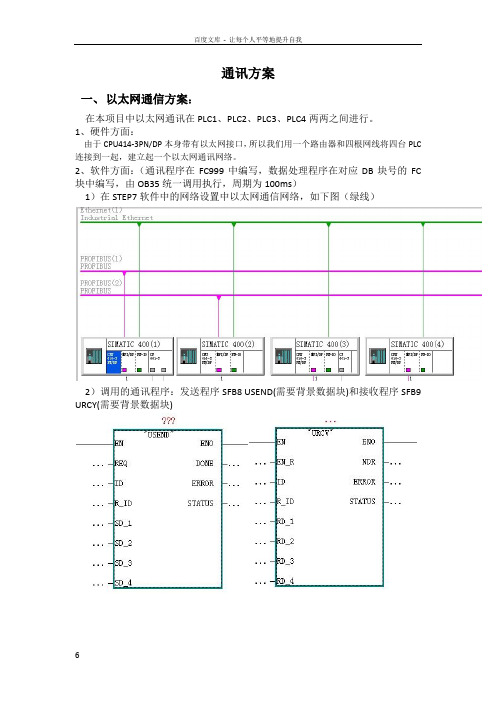
通讯方案一、以太网通信方案:在本项目中以太网通讯在PLC1、PLC2、PLC3、PLC4两两之间进行。
1、硬件方面:由于CPU414-3PN/DP本身带有以太网接口,所以我们用一个路由器和四根网线将四台PLC 连接到一起,建立起一个以太网通讯网络。
2、软件方面:(通讯程序在FC999中编写,数据处理程序在对应DB块号的FC 块中编写,由OB35统一调用执行,周期为100ms)1)在STEP7软件中的网络设置中以太网通信网络,如下图(绿线)2)调用的通讯程序:发送程序SFB8 USEND(需要背景数据块)和接收程序SFB9 URCY(需要背景数据块)PLC1为SAND PLC2为REC时,PLC1的ID为1,PLC2的ID为1PLC1为SAND PLC3为REC时,PLC1的ID为2,PLC3的ID为1PLC1为SAND PLC4为REC时,PLC1的ID为3,PLC4的ID为1PLC2为SAND PLC1为REC时,PLC2的ID为1,PLC1的ID为1PLC2为SAND PLC3为REC时,PLC2的ID为2,PLC3的ID为3PLC2为SAND PLC4为REC时,PLC2的ID为3,PLC4的ID为3PLC3为SAND PLC1为REC时,PLC3的ID为1,PLC1的ID为2PLC3为SAND PLC2为REC时,PLC3的ID为3,PLC2的ID为2PLC3为SAND PLC4为REC时,PLC3的ID为2,PLC4的ID为2PLC4为SAND PLC1为REC时,PLC4的ID为1,PLC1的ID为3PLC4为SAND PLC2为REC时,PLC4的ID为3,PLC2的ID为3PLC4为SAND PLC3为REC时,PLC4的ID为2,PLC3的ID为24)在STEP7中对应的发送/接收的数据块PLC1向PLC2发送的数据存储在PLC1的DB112中,PLC2接收PLC1的数据存储在PLC2的DB112中(模拟量给DB50/DB52,数字量变为M***.*)PLC1向PLC3发送的数据存储在PLC1的DB113中,PLC3接收PLC1的数据存储在PLC3的DB113中(模拟量给DB50/DB52,数字量变为M***.*)PLC1向PLC4发送的数据存储在PLC1的DB114中,PLC4接收PLC1的数据存储在PLC4的DB114中(模拟量给DB50/DB52,数字量变为M***.*)PLC2向PLC1发送的数据存储在PLC2的DB121中,PLC1接收PLC2的数据存储在PLC1的DB121中(模拟量给DB50/DB52,数字量变为M***.*)PLC2向PLC3发送的数据存储在PLC2的DB123中,PLC3接收PLC2的数据存储在PLC3的DB123中(模拟量给DB50/DB52,数字量变为M***.*)PLC2向PLC4发送的数据存储在PLC2的DB124中,PLC4接收PLC2的数据存储在PLC4的DB124中(模拟量给DB50/DB52,数字量变为M***.*)PLC3向PLC1发送的数据存储在PLC3的DB131中,PLC1接收PLC3的数据存储在PLC1的DB131中(模拟量给DB50/DB52,数字量变为M***.*)PLC3向PLC2发送的数据存储在PLC3的DB132中,PLC2接收PLC3的数据存储在PLC2的DB132中(模拟量给DB50/DB52,数字量变为M***.*)PLC3向PLC4发送的数据存储在PLC3的DB134中,PLC4接收PLC3的数据存储在PLC4的DB134中(模拟量给DB50/DB52,数字量变为M***.*)PLC4向PLC1发送的数据存储在PLC4的DB141中,PLC1接收PLC4的数据存储在PLC4的DB141中(模拟量给DB50/DB52,数字量变为M***.*)PLC4向PLC2发送的数据存储在PLC4的DB142中,PLC2接收PLC4的数据存储在PLC2的DB142中(模拟量给DB50/DB52,数字量变为M***.*)PLC4向PLC3发送的数据存储在PLC4的DB143中,PLC3接收PLC4的数据存储在PLC3的DB143中(模拟量给DB50/DB52,数字量变为M***.*)注:需要传送的数据要到现场进行核对二、MODBUS通信方案在本项目中MODBUS通讯采用RS-485为通信电缆,由PLC1(PLC2)与DCS 和传动(GE)分别进行通讯,PLC3(PLC4)与DCS进行通讯。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
表1图1图2要通过S7-PNCPU的集成PROFINET接口实现S7通信,需要在硬件组态中建立连接。
2.硬件及网络组态CPU采用两个315-2PN/DP,使用以太网进行通信。
在STEP7中创建一个新项目,项目名称为PNS7。
插入两个S7-300站,在硬件组态中,分别插入CPU315-2PN/DP。
如图3所示。
图3新建以太网,打开“NetPro”设置网络参数,选中CPU,在连接列表中建立新的连接。
如图4所示。
图4然后双击该连接,设置连接属性。
在“General”属性中块参数ID=1,这个参数即是下面程序中的参数“ID”。
在SIMATIC315PN-1中激活“Establishanactiveconnection”,作为Client端,SIMATIC315PN-2作为Server端。
3.软件编程3.1.无确认数据交换SFB/FB8"USEND"向类型为“URCV”的远程伙伴SFB/FB发送数据。
执行发送过程而不需要和SFB/FB伙伴进行协调。
也就是说,在进行数据传送时不需要伙伴SFB/FB进行确认。
S7-300:在REQ的上升沿处发送数据。
在REQ的每个上升沿处传送参数R_ID、ID和SD_1。
在每个作业结束之后,可以给R_ID、ID和SD_1参数分配新数值。
S7-400:在控制输入REQ的上升沿处发送数据。
通过参数SD_1到SD_4来指向要发送的数据,但并非都需要用到所有四个发送参数。
然而,必须确保参数SD_1到SD_4/SD_1和RD_1到RD_4/RD_1(在相应通讯伙伴SFB/FB"URCV"上)所定义的区域在以下几个方面保持一致:?编号?长度?数据类型参数R_ID必须在两个SFB中完全相同。
如果传送成功完成,则通过状态参数DONE来表示,此时其逻辑数值为1。
SFB/FB9"URCV"从类型为“USEND”的远程伙伴SFB/FB中异步接收数据,并把接收到的数据复制到组态的接收区域内。
当程序块准备好接收数据时,EN_R输入处的逻辑值为1。
可以通过EN_R=0来取消一个已激活的作业。
S7-300:在EN_R的每个上升沿处应用参数R_ID、ID和RD_1。
在每个作业结束之后,可以给R_ID、ID和RD_1参数分配新数值。
S7-400:通过参数RD_1到RD_4来指向接收数据区。
必须确保参数RD_i/RD_1和SD_i/SD_1(在相应通讯伙伴SFB/FB"USEND"上)所定义的区域在以下几个方面保持一致:??编号?长度?数据类型。
通过NDR状态参数逻辑数值为1来指示已经成功完成复制处理过程。
参数R_ID必须在两个SFB/FB上完全相同。
打开SIMATIC315PN-1的OB1,在OB1中依次调用FB8,FB9如图5、图6所示:图5程序中的参数说明见表2表2FB8参数说明图6程序中的参数说明见表3表3FB9参数说明同样,在SIMATIC315PN-2的OB1中,调用FB8/FB9。
通信双方的“R_ID”均设为0。
将SIMATIC315PN-1的MB100-MB109赋值B#16#02,在SIMATIC315PN-2中,将FB9的“EN_R”置1,然后在SIMATIC315PN-1中,将FB8中“REQ”设置上升沿信号,此时SIMATIC315PN-2的MB110-MB119接收到B#16#02。
如图7所示。
图7同理,将SIMATIC315PN-2的MB100-MB109赋值为B#16#03,SIMATIC315PN-1的MB110-MB119接收到B#16#03。
如图8所示。
图83.2.确认数据交换SFB/FB12"BSEND"向类型为“BRCV”的远程伙伴SFB/FB发送数据。
通过这种类型的数据传送,更多的数据可以在通讯伙伴之间传输,超过任何其它用于组态的S7连接的通讯SFB/FB所能传输的数据量,通过集成PN口的S7-400和S7-300是65534字节。
要发送的数据区是分段的。
各个分段单独发送给通讯伙伴。
通讯伙伴在接收到最后一个分段时对此分段进行确认,该过程与相应SFB/FB"BRCV"的调用无关。
在调用块之后,当在控制输入REQ上有上升沿时,发送作业被激活。
发送用户存储区中的数据与处理用户程序是异步执行的。
由SD_1指定起始地址和要发送数据的最大长度。
可以通过LEN来确定数据域的作业指定长度。
在这种情况下,LEN 替换SD_1的长度区域。
参数R_ID必须在相应的两个SFB/FB上完全相同。
如果在控制输入R处有上升沿,则当前数据传送将被取消。
如果传送成功完成,则通过将状态参数DONE的数值设置为1来进行指示。
如果状态参数DONE 或ERROR的数值为1,则在前一个发送处理结束之前,不能处理新的发送作业。
SFB/FB13"BRCV"接收来自类型为“BSEND”的远程伙伴SFB/FB的数据。
在收到每个数据段后,向伙伴SFB/FB发送一个确认帧,同时更新LEN参数。
在块调用完毕,并且在控制输入EN_R数值为1之后,块准备接收数据。
可以通过EN_R=0来取消一个已激活的作业。
由RD_1指定起始地址和接收区的最大长度。
由LEN指示已接收数据域的长度。
从用户存储区中接收数据与处理用户程序是异步执行的。
参数R_ID必须在相应的两个SFB/FB上完全相同。
通过状态参数NDR的数值为1来指示所有数据段的无错接收。
接收到的数据保持不变,直到通过EN_R=1来重新调用SFB/FB13为止。
如果在数据的异步接收期间调用块,则将引发一个警告,该警告通过STATUS参数输出;如果当控制输入EN_R数值为0时进行调用,则接收将被终止,并且SFB/FB将返回到它的初始状态。
打开SIMATIC315PN-1的OB1,在OB1中依次调用FB12,FB13如图9、图10所示:图9程序中的参数说明见表4表4FB12参数说明图10程序中的参数说明见表5表5FB13参数说明同样,在SIMATIC315PN-2的OB1中,调用FB12/FB13。
通信双方的R_ID设为0,LEN设为10,将SIMATIC315PN-1的MB120-MB129赋值B#16#04,在SIMATIC315PN-2中,将FB13的“EN_R”置1,然后在SIMATIC315PN-1中,将FB12中“REQ”设置上升沿信号,此时SIMATIC315PN-2的MB130-MB139接收到B#16#04。
如图11所示。
图11同理,将SIMATIC315PN-2的MB120-MB129赋值为B#16#05,SIMATIC315PN-1的MB130-MB139接收到B#16#05。
如图12所示。
图123.3.单边访问可以通过SFB/FB14"GET",从远程CPU中读取数据。
S7-300:在REQ的上升沿处读取数据。
在REQ的每个上升沿处传送参数ID、ADDR_1和RD_1。
在每个作业结束之后,可以分配新数值给ID、ADDR_1和RD_1参数。
S7-400:在控制输入REQ的上升沿处启动SFB。
在此过程中,将要读取的区域的相关指针(ADDR_i)发送到伙伴CPU。
远程伙伴返回此数据。
在下一个SFB/FB调用处,已接收的数据被复制到组态的接收区(RD_i)中。
必须要确保通过参数ADDR_i和RD_i定义的区域在长度和数据类型方面要相互匹配。
通过状态参数NDR数值为1来指示此作业已完成。
只有在前一个作业已经完成之后,才能重新激活读作业。
远程CPU 可以处于RUN或STOP工作状态。
如果正在读取数据时发生访问故障,或如果数据类型检查过程中出错,则出错和警告信息将通过ERROR和STATUS输出表示。
通过使用SFB/FB15"PUT",可以将数据写入到远程CPU。
S7-300:在REQ的上升沿处发送数据。
在REQ的每个上升沿处传送参数ID、ADDR_1和SD_1。
在每个作业结束之后,可以给ID、ADDR_1和SD_1参数分配新数值。
S7-400:在控制输入REQ的上升沿处启动SFB。
在此过程中,将指向要写入数据的区域(ADDR_i)的指针和数据(SD_i)发送到伙伴CPU。
远程伙伴将所需要的数据保存在随数据一起提供的地址下面,并返回一个执行确认。
必须要确保通过参数ADDR_i和SD_i定义的区域在编号、长度和数据类型方面相互匹配。
如果没有产生任何错误,则在下一个SFB/FB调用时,通过状态参数DONE来指示,其数值为1。
只有在最后一个作业完成之后,才能再次激活写作业。
远程CPU可以处于RUN或STOP模式。
如果正在写入数据时发生访问故障,或如果执行检查过程中出错,则出错和警告信息将通过ERROR和STATUS输出表示。
打开SIMATIC315PN-1的OB1,在OB1中依次调用FB14,FB15如图13、图14所示:图13表6FB14参数说明图14表7FB15参数说明同样,在SIMATIC315PN-2的OB1中,调用FB14/FB15。
将SIMATIC315PN-2的MB140-MB149赋值B#16#06,在SIMATIC315PN-1中,将FB14的“REQ”置上升沿信号,此时SIMATIC315PN-1的MB150-MB159接收到B#16#06。
如图15所示。
图15将SIMATIC315PN-1的MB140-MB149赋值B#16#08,在SIMATIC315PN-2中,将FB14的“REQ”置上升沿信号,此时SIMATIC315PN-2的MB150-MB159接收到B#16#08。
如图16所示。
图16将SIMATIC315PN-1的MB170-MB179赋值B#16#07,将FB15的“REQ”置上升沿信号,此时SIMATIC315PN-2的MB160-MB169接收到B#16#07。
如图17所示。
图17将SIMATIC315PN-2的MB170-MB179赋值B#16#11,将FB15的“REQ”置上升沿信号,此时SIMATIC315PN-1的MB160-MB169接收到B#16#11。
如图18所示。
图184.常见问题?两个S7-300PNCPU之间建立S7连接可有哪些通信方式?答:可以有确认连接、非确认连接、单边通信?使用FB8/9时,数据已发送,程序块没有错误显示,但是没收到任何数据?答:发送区与接收缓冲区长度不一致。
?使用FB12/13时,发送区与接收缓冲区长度是否必须一致?答:发送区的大小只要不超过接收缓冲区就可以。
?FB12发送数据时,发送数据的长度由哪个参数决定?答:发送长度由LEN决定。
但发送数据的起始地址和最大长度由SD_1决定。