GPS控制网技术总结
GPS控制网建立中的若干技术问题
GPS控制网建立中的若干技术问题探讨摘要:随着电子技术的发展,测绘科学由传统的作业方式逐步转换成现代技术的广泛应用,特别是近代卫星技术的发展,给测绘科学中的控制测量带来划时代的革命,由传统的三角网作业方式,转换为现代全球定位系统,gps因其不可比拟的技术优势,迅速成为国内外测绘者的新宠,更成为各级工程控制网建立的主要方式。
关键词:gps控制网,粗差探测,图形强度,高程拟合中图分类号:f407.63 文献标识码:a 文章编号:1、 gps相对定位的概述gps相对定位,顾名思义,它测量的位置是相对于某一已知点的位置,而不是在wgs—84坐标系中的绝对位置。
这就是说,它精确测定出两点间的坐标分量(△x,△y,△z)和边长(b)。
这样,如果一点的绝对坐标已知,则根据这点的已知坐标计算出另一点的精确坐标。
在gps相对定位中,至少要应用两台精密测地型gps接收机。
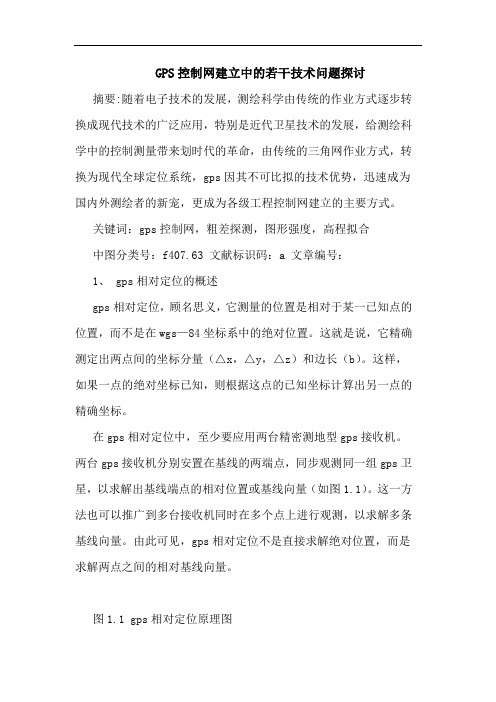
两台gps接收机分别安置在基线的两端点,同步观测同一组gps卫星,以求解出基线端点的相对位置或基线向量(如图1.1)。
这一方法也可以推广到多台接收机同时在多个点上进行观测,以求解多条基线向量。
由此可见,gps相对定位不是直接求解绝对位置,而是求解两点之间的相对基线向量。
图1.1 gps相对定位原理图2 、图古日格gps控制网建立2.1图古日格gps平面控制网建立过程简介测区位于内蒙古自治区乌拉特中旗政府驻地海流图镇方位310°直距103km处。
地理坐标:东经:107°33′25″-107°45′18″北纬:42°9′17″-42°10′51″2.1.1平面控制网的准备工作本次d级gps控制网测量投入美国ashtech gps接收机六台套(其中双频接收机四台套,单频接收机二台套)。
观测前gps接收机进行一般检视和通电检验,并检验基座圆水准气泡和光学对中器是否正确;检验天线高量尺是否完好,尺长精度是否正确。
对GPS控制网建立中的若干技术问题分析
对GPS控制网建立中的若干技术问题分析摘要:随着电子技术的发展,测绘科学由传统的作业方式逐步转换成现代技术的广泛应用,特别是近代卫星技术的发展,给测绘科学中的控制测量带来划时代的革命,由传统的三角网作业方式,转换为现代全球定位系统,gps因其不可比拟的技术优势,迅速成为国内外测绘者的新宠,更成为各级工程控制网建立的主要方式,本文以内蒙古图古日格金矿为例,对gps控制网建立中的若干技术问题展开讨论。
关键词:gps控制网;粗差探测;图形强度;高程拟合中图分类号:p228.4文献标识码:a文章编号:1.gps相对定位的概述gps相对定位,顾名思义,它测量的位置是相对于某一已知点的位置,而不是在wgs—84坐标系中的绝对位置。
这就是说,它精确测定出两点间的坐标分量(△x,△y,△z)和边长(b)。
这样,如果一点的绝对坐标已知,则根据这点的已知坐标计算出另一点的精确坐标。
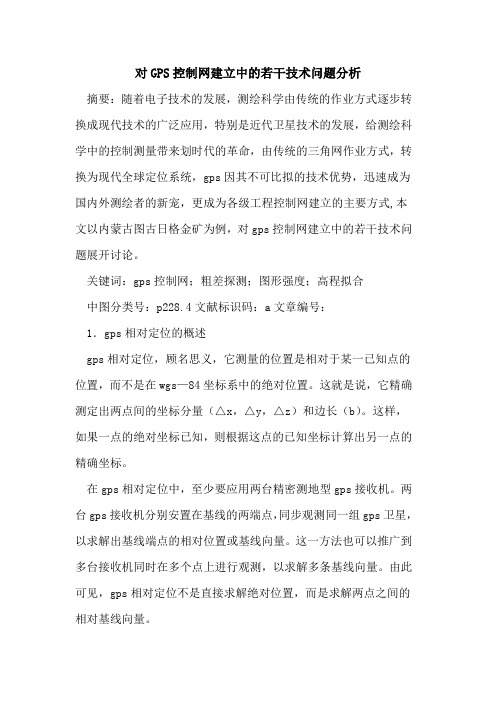
在gps相对定位中,至少要应用两台精密测地型gps接收机。
两台gps接收机分别安置在基线的两端点,同步观测同一组gps卫星,以求解出基线端点的相对位置或基线向量。
这一方法也可以推广到多台接收机同时在多个点上进行观测,以求解多条基线向量。
由此可见,gps相对定位不是直接求解绝对位置,而是求解两点之间的相对基线向量。
2.图古日格gps控制网建立测区位于内蒙古自治区乌拉特中旗政府驻地海流图镇方位310°直距103km处。
地理坐标:东经:107°33′25″-107°45′18″北纬:42°9′17″-42°10′51″。
2.1平面控制网的准备工作本次d级gps控制网测量投入美国attach gps接收机六台套(其中双频接收机四台套,单频接收机二台套)。
观测前gps接收机进行一般检视和通电检验,并检验基座圆水准气泡和光学对中器是否正确;检验天线高量尺是否完好,尺长精度是否正确。
2.2 gps平面控制网布设、选点与埋石控制网的布设完全按gpsd级网的要求开展,选点要求:点位牢固便于操作便于保存、对空通视、回避强电干扰、回避多路径反射源、交通便利,共布设22个点。
GPS在城市控制网中的应用

测
、
况 当然 不能称为是在一个统一 的l 一维坐标 系中的实际三维 坐 标, 被迫无奈 , 城市建设者和技术 人员 也就 只能满 足于二维 的
平 面坐 标 系 。随 着虚 拟 技 术 和 空 间技 术 的不 断 飞 跃 发 展 , 今 如
现 代城 市的控制网最好也 同时具有 能够符合客 观空间实 际的 精确 三维地心坐标 。 这将是城市进行精密测量技术 的一个主流 趋势和发展前景。 20 在 0 3年 , 国家的测绘部 门己面 向全 国提供 了以 G S 0 0网为坐标框架 的三维地 心坐标 , 因如此 , P20 正 在现 代城市控制 网革新和改建上 , 就应当全面的考虑在城市建设精 确的三维地心坐标系 , 使之能与 国家的现代化建设保持一致的 步伐 , 并能够 与国际技术接轨。 在城市控制 网的实际运用上 , 精 确的建立城市三维地心坐标框架能有力地 推动 G S在实时动 P 态定位技术(T ) 的快速 发展和高效普 及 , 在实 际运 作 中 R K上 并 有力地促进城市地区的地理信息基础建设。
中 的运 用 以及 空 间 大 地 网 的方 法 和理 论 的 时 间研 究 。 些 新 技 这
②要以框架 网为布设依托 , 将城市控制 网的点位原则上 布
设于交通相对便利 的地方 。 ③水准 网与 G S网的相互结合运 用 ,在地区 内均匀 的布 P 设一定密度的 G S网f P 其点距离平地应 为 7i— O m, k l k 而山地标 n 准应 为 1k ~ 0 m左 右) 0m 2k ,并 且能够用 二等水 准进行 联测 高
体 实现 。
关键词 : 城市控制网 ;P 控制测量; GS 布设原理
中图分类号 : 2 84 P 2 . 文献标识码 : B 文章编号 :0 7 7 5 (0 )2 0 — 1 1 0 — 3 92 1 0 — 1 4 0 2 9
GPS卫星导航定位技术与方法知识点总结
知识点总结的不容易一页一页总结的,用积分来换吧!第一章全球定位系统概论全球导航卫星系统GNSS目前包括全球定位系统GPS、俄罗斯的格罗纳斯系统GLONASS。
中国的北斗卫星定位系统COMPASS以及欧洲联盟正在建设的伽利略系统GALILEO GPS利用卫星发射无线电信号进行导航定位,具有全球、全天候、高精度、快速实时的三维导航、定位、测速和授时功能。
GPS主要由GPS(GPS卫星星座)空间部分、地面监控部分、用户接受处理部分组成,GPS地面监控部分有分布在全球的若干个跟踪站组成的监控系统组成,跟踪站被分为主控站、监控站和注入站。
GPS用户部分有GPS接收机、数据处理软件及相应的用户设备(如计算机气象仪)组成。
GPS实施计划共分三个阶段:第一阶段为方案论证和初步设计阶段。
从1973年到1979年,共发射了4颗试验卫星。
研制了地面接收机及建立地面跟踪网。
第二阶段为全面研制和试验阶段。
从1979年到1984年,又陆续发射了7颗试验卫星,研制了各种用途接收机。
实验表明,GPS定位精度远远超过设计标准。
第三阶段为实用组网阶段。
1989年2月4日,第一颗GPS工作卫星发射成功,宣告了GPS系统进入了工程建设阶段,这种工作卫星称为Block Ⅱ和BlockⅡA型卫星。
这两组卫星差别是:Block Ⅱ只能存储14天用的导航电文(每天更新三次);而BlockⅡA卫星能存储180天用的导航电文,确保在特殊情况下使用GPS卫星。
实用的GPS网即(21颗工作卫星+3颗备用卫星)GPS星座已建立,今后将根据计划更换失效的卫星。
GPS的特点:定位精度高、观测时间短、测站无需通视、可提供三维坐标、操作简便、全天候作业。
功能多,应用广GPS卫星信号包括测距码信号(即P码和C/A码信号)、导航电文(或称D码,即数据码信号)和载波信号。
GPS卫星的导航电文主要包括:卫星星历、时钟改正参数、电离层时延改正参数、遥测码,以及由C/A码确定P 码信号时的交接码等参数。
GPS控制网与常规控制网的精度比较
GPS控制网与常规控制网的精度比较摘要:本文从布网方案、控制网的等级、限差与级差的计算方法、精度四个方面对常规控制网和gps控制网进行了比较,得出了如下结论:gps布网原则与常规测量不同,即并非逐级发展、层层控制;e级gps点的点位精度高于四等导线,高程精度完全可以代替四等水准。
并通过壁青测区的实测例子验证了该结论。
关键词:常规控制网、gps控制网、精度建立常规控制网必须遵循一系列原理与原则,建立gps控制网页必须遵循一系列的原理和原则,但两者概念是有区别的,不能混为一谈,以免形成误导。
1.关于布网方案的问题gps布网方案有四种:①人们熟悉的最经典的布网原则:“由整体到局部、先控制后碎部”,也就是说,有高级到低级,逐级发展,层层控制。
②有同等精度到同等精度,以已建控制网为基础,按照需要,进行扩充,对新扩充的控制网,通过序贯平差,使新扩充的控制网与原有控制网在精度上保持一致,也就是控制网等级相同。
③越级布网,即在二等网的,可以直接布设四等网。
④在低级网的基础上可以布设高级网。
例如:在长隧道的两端,仅有四等网点,由于隧道较长,按照精度要求,需要布设三等网,此时,可以采取一系列特殊措施,在四等网的基础上,布设三等网。
这在理论上和实际上都实行得通的,在网的原理上十一大突破。
2.关于常规控制网与gps控制网有无对应关系的问题常规控制网分为一、二、三、四、五(5”小三角)五个等级。
gps控制网分为abcde五级,有人认为它们之间存在着一、一对应关系,这是一种误解。
常规控制网称一、二、三、四、五等控制,而gps控制网分为a、b、c、d、e级控制,一个称“等”,一个称“级”,从名称上就有区别了。
常规控制网等级之间的关系是一层层控制的关系,即高等级控制低等级,彼此不是平行的关系。
而gps控制网等级之间,不存在一级控制一级的关系,彼此时独立的,是一种平行关系。
常规大地测量的坐标是一级靠一级,其精度是一级比一级差,距起始点(坚强点)越远的点(最弱点),其精度越低,误差分布是不均匀的。
广州市GPS控制网的设计特色和技术要点
北 京 坐 标 系 、 9 0年 西 安 坐 标 系 、 GS 8 18 W 一 4坐 标 系 、 州 独 立 广 坐 标 系 等 成 果 在 w GS 8 一 4系 中进 行 三 维 平 差 , 坐 标 系 则 各 利 用 统 一 的 三维 平 差 结 果 作 为 输 入 量 , 别 进 行 二 维 平 差 。 分 对 于地方 坐 标 系则 分别 用平 差 法 和转 换法 求 出两套 成果 。 5 为 了 求 得 GP ) S点 的 高 程 , 设 了 一 个 路 线 总 长 约 为 布 4 0k 的 四 等 水 准 网 , 匀 联 测 了 3 0 m 均 5个 不 同 等 级 的 GP S网 点 。 通 过 巧 妙 地 设 计 联 测 路 线 和 联 测 点 , 高 程 拟 合 求 得 的 使 网 中 GP S点 的 拟 合 高 程 具 有 较 高 的 精 度 。经 过 实 地 检 测 , 全
意见 , 将 国标 征求 意见 稿 中 的要求 写入 了技 术设计 书 。 并 2 )分 级 布 设 , 级 加 密 , 约 资 金 由 于 采 用 GP 逐 节 S布 网 , 相 互 等 级 间 的 精 度 差 异 比 较 小 , 对 于 高 级 点 的 误 差 比 常 规 相
测 量 要 小 得 多 , 度 损 失 小 , 资 金 的 投 入 则 比 一 次 布 网 要 精 而
广 州 市 GP S控 制 网 由 GP — GP — GP — S C、 S D、 S E 3个 等 级 的 GP S网 组 成 GP — 级 网 主 要 是 作 为 首 级 控 制 的 骨 架 , SC 起 到 发 展 下 级 网 的 作 用 ; S D 级 网 是 加 密 网 , 全 测 区 均 匀 GP — 在 布设 ; SE级 网则 主要 是为 城市 地 形 、 籍 、 程测 量 提供 GP — 地 工 控制 起算 , 便 于下 级发 展 和与 其 他测量 手 段联 测 。 并
GPS控制网的技术设计探讨

C ≤ 1 0
≤6
E ≤1 0
≤ 1 0
匮定 差 a( ) 是 u
比倒 谩 差幕 敛 b (pL p l  ̄
≤1 0
≤2 0
因 素 ,以 期 在 满 足 要 求的 前 提 条 件 下 ,取 得最佳效益 。 ( ) 设 计 的 基 本 原 则 一 l、G P S 网一 般应 采用 由独立 观测 边 构成 的 闭合 图 形 。 例 如 三 角形 、多 边形 或 附 和 线 路 ,以 构 成 检核 条件 ,提 高 网 的可
盛
维普资讯
昌圈 里
GP S控制 网的技术 设计探讨
文0 李芳芳 赵新华 ( 南省地质 测绘 总院 河 南郑州) 河 摘 要 : 本 文 结 合 多 来 的 工 作 实 践 ,
也可 以包含 一些 附和 路线 ,G PS 网 中不允 由地 面 的 电 磁 波测 距 边 确 定 ,或 由 两个 以
上 的起 算点 之间 的距离 确定 ,也 可以 由 主 要 对 GPS 控 制 网技 术 设 计 的 一 般 原 则 和 许 存 在 支 线 。 GPS基 线 向量的 距离确 定 。 图形 设 计 的有 关 问题 进 行 了认真 研 究 。 具 ( ) G P S 测 量 的 精 度 标 准 三 ( )G P S 点 的高 程 五 有 一 定 的 借 鉴意 义。 G PS测 量 的精度 标准 通常 用 网中相邻 为 了得 到 G P 点的正 常高 ,应使 一定 S 关键 词 : s;控 制 网 ;技 术设 计 ;图 G P 点 之 间 的 距 离 中 误 差 表 示 ,其 形式 为 : 数 量的 G PS点 与水准 点重 合 ,或 者对部 分 形 设 计 丽 引言 式 中: o 一距离 中误差 ( i ) 一 G P S 点 联测 水 准 。 为 了便 于 进行 水 准联 一 i n ;a n 测 ,且 便于进行 GPS观测 ,提高 GPS作业 GP S是英文 Na iain S tlt m— vg t ael e Ti o i 固定 误差 ( i nm ) b一 一 比例 误差 系数 l 效 率 ,G 点一 般应 设 在 交 通便 利 的地 PS i g a d Ra g n / o a o iin n y — n n n i g Glb lP st i g S s— o ( Pi ) d一一 相邻 点的距 离 ( i 。 P n l k n) t m 的字 头缩写词 NAVS e TAR/ S的简 GP 2 0 年 实施的 “ 01 全球 定位系统 ( S 方 。 GP ) 三 ,GP s控制 网的 图形设 计 称 。它 的 含 义是 :利 用导 航 卫 星 进 行 测 时 测量 规范 ”将 GPS的测量 精度 分为 AA ~
GPS控制网平差总结报告

GPS控制网平差总结报告GPS控制网是指由一组GPS基准站组成的网络,用于测量和控制大范围区域内的GPS定位精度。
GPS控制网平差是对GPS观测数据进行处理和分析,得到每个GPS站点的坐标和高程的过程。
该报告对GPS控制网平差的基本原理、流程以及常用的算法进行了总结。
报告首先介绍了GPS控制网平差的基本原理。
GPS观测数据包括卫星观测值和接收机历元数据,可以通过基线解算得到不同站点之间的相对位置关系。
基于这些相对位置关系,可以通过平差方法计算出每个站点的绝对坐标和高程。
报告还列举了常用的GPS控制网平差算法。
最常用的算法包括最小二乘法、加权最小二乘法和区域平差法。
最小二乘法通过最小化观测值与模型预测值之间的残差来求解平差参数。
加权最小二乘法则考虑观测数据的权重,将不同类型的数据进行加权处理。
区域平差法则将整个控制网分成若干个区域,分别进行平差计算,再通过闭合差控制各个区域之间的一致性。
最后,报告总结了GPS控制网平差的应用和挑战。
GPS控制网平差在地理测量、地质灾害监测和测绘工程等领域具有重要应用价值。
然而,由于GPS观测数据本身存在误差和不确定性,平差算法和数据处理过程中需要考虑到这些因素,以提高平差结果的准确性和可靠性。
综上所述,GPS控制网平差是一种重要的测量和控制技术,可以用于获取大范围区域内的GPS定位精度。
通过了解GPS控制网平差的基本原理、流程和常用算法,可以更好地应用该技术解决实际问题。
然而,在实际应用中仍然需要不断改进算法和数据处理方法,以提高平差结果的精度和可靠性。
GPS控制实习实验报告

GPS控制实习实验报告一、实习目的本次 GPS 控制实习实验的主要目的是让我们熟悉 GPS 测量的基本原理和操作流程,掌握 GPS 接收机的使用方法,以及学会如何处理和分析 GPS 测量数据,从而提高我们在测绘工程领域的实践能力和解决实际问题的能力。
二、实习原理GPS(Global Positioning System)即全球定位系统,是一种基于卫星导航的定位技术。
它通过接收至少四颗卫星的信号,来确定接收机所在的位置、速度和时间等信息。
GPS 测量的基本原理是利用卫星信号的传播时间来计算接收机与卫星之间的距离,然后通过多个卫星的距离测量值以及卫星的位置信息,采用空间后方交会的方法来解算出接收机的位置坐标。
三、实习仪器与设备本次实习使用的主要仪器设备包括:_____牌 GPS 接收机若干台、三脚架、对中杆、数据传输线以及配套的处理软件等。
四、实习内容与步骤1、外业观测选点:根据测量任务和现场环境,选择视野开阔、周围无高大障碍物、远离强电磁干扰源的地点作为 GPS 控制点。
相邻控制点之间应保持良好的通视条件,便于后续测量工作的开展。
架设仪器:将 GPS 接收机安装在三脚架或对中杆上,确保仪器平稳、对中、整平。
打开接收机电源,设置好相关参数,如观测时段长度、采样间隔、卫星高度角等。
观测:按照预定的观测计划,同时开启多台接收机进行同步观测。
观测过程中,应注意观察接收机的工作状态,确保数据采集的连续性和完整性。
2、内业数据处理数据传输:将外业观测得到的数据通过数据传输线导入计算机中。
数据预处理:使用配套的处理软件对导入的数据进行预处理,包括检查数据质量、剔除异常观测值、修复周跳等。
基线解算:选择合适的基线解算模式和参数,对观测数据进行基线解算。
解算完成后,检查基线的质量,如基线长度、方差比、中误差等,确保基线结果符合精度要求。
网平差:以已知控制点为起算数据,对整个 GPS 控制网进行无约束平差和约束平差。
浅谈GPS控制网在测量中的若干技术方法和流程

( )为确保 数据 安全 ,每 天 的观测 数据 应及 时 6
( )编 制测 站环 视 图 ,将 测站 地平 高度 角 大于 传 输 至微 机 存 盘保 存 。每 天测 站 的 点名 、 点 号 、仪 3
1。 0 的主 要 障碍物 一 一标 出 ,以便作 业 时顾及 障碍 物 器 高 、天线 高 的输 入应准 确 无误 。 对卫 星信 号 的影 响 ;
存 的地方 , 以及便 于 接 收 设备 安 置 和观 测 操 作 的地
方。
( )在测 站上 ,天线 要严 格整 平对 中,天线 固 3 定标志 大 致朝 北 ,天 线高测 量 方法应 满足 规范 要求 ,
( )点位应 选在 视野 开 阔 的地 点 。城 市 内优先 天 线应 与 周 围物 体 相 隔 5 以上 ,必要 时可 偏心观 2 m 设 点 地址 可 考 虑 为 公 园 、停车 场 、稳 固 的建 筑 物楼 测 ,精度 必 须符 合规 范 的要求 , 天线 高量 取测 前 、测 顶 和高 地 ,高度 角 l 。 5 以上 的天空 不应 有 障碍物 ,以 后 各分 三个 互 为 10 的位 置精 确量 取 ,中数 的互差 2。 免 阻挡 卫星 信 号接 收 。 不 得超 过 3 rl 用平 均值 ,读 数精 确到 lm 。此 I ,采 l f I m
( )全 网的 同步 观测 时 间均应 安排 在每 天 的最 1 佳 观测 时段 ,每 时段最 少跟 踪 4颗 卫星 ,精 度 因子 P O 均 小于 6 0 D P值 . ,卫星 高度 角大 于等 于 l 。 观 测 5,
选 点 的科 学与 否 ,是影 响 G S外 业观 测质 量和 时段数 应 大于 等于 2。 P G S网精 度 的重要 因素 。 点 的最主 要 原则 是 既满足 P 选 ( )每 时段 观 测 时间应 严格执 行 规范要 求 ,其 2
GPS控制网质量控制分析

C
l 0
5
1 20 /1 0 00
D
1 0
l 0
l 0 口口 /8 0
E
1 0
2 0Leabharlann l4 0 0 / 50 一
级
1 0
2 0
120 0 / 00
避稍 髓上 氍 B糍
静遁# 薯
英
二 级
1 5
2 0
1 00 /10 0
、
( ) 编 写 技 术 设 计 书 三 根 据 测 量 任 务需 要 , 收 集测 区范 围既 有 的测 量 资 料 、 有关 地 形 图、 交通 图 、测 区 总 体 建 设 规 划 和 近 期 发 展规 划 等 资 料 , 而 后进 行资 料 分 析研 究 ,必 要 时进 行 实 地 勘 察 ,按 照 最 优 化 原 则 进 行 室 内 图 上 设 计 。同 时 ,根 据控 制 网的 精 度设 计要 求 编 写 技 术 设 计 书 ,其 内容 主 要 包 括 : 项 目来 源 : 介绍 项 目的 来 源 、性 质 。
测 区 概 况 : 介 绍 测 区 的 地 理 位 置 、 气 候 、人 文 、经 济 发展 状 况 、交 通 条件 、通
讯 条件 等 。 工 程 概 况 : 介 绍 工 程 目 的 、 作 用 、 要
CH 8 6 0l 95
中华 人 民共 和 国测 绘 行 业标 准 测 绘 产 品 检 查 验 收 规 定 CH l 0 9 02 5 二 、专 业 技 术 设 计 ( )等级 划分 。 一 根据 全球 定位 系统 ( G P S)测 量规 范 》和 全球 定位 系统 城 市测量 技 术规 程 中规 定的城 市各级 G PS控制 网相邻 点问平 均距 离 ,要求 在城 市 G PS 控 制 网布设 时 , 其 相邻 点 问平 均 距离 应 符 合表 l要 求 。 同 时 , 允 许 相 邻 点 的 最 小 距 离 可 为 平 均 距 离 的 l /3 ~l/2, 最 大 距 离 可 为 平 均 距 离 的 2~3倍 。考 虑 到南方 地 区丘陵 山地 地形 复杂 ,因此 ,在 南方地 区布设 C级 GPS控 制 网 时 ,其 平 均边 长 限 制 可根 据 实 际情 况 适 当放 宽 到 2 0~2 km , 同 时 规 定 边 长 超 5 过 2 km 的 同步环 应增测一 个时段 ,以 确 5 保 GPS 测 量 数 据 的 质 量 。 表 l 城市各级 GP : S控制网 平均边长 ( 位 :km ) 单
D级GPS控制测量专业技术总结
D级GPS控制测量专业技术总结编写单位:编写者:年月日审核意见:审核者:年月日桂林市七星区GPS 控制测量技术总结一、测区概况七星区位于桂林市的东南部,北至迭彩区,南至 穿山公园,西至象山区,东至桂林环城公路。
测区内平均高程为海拔150米。
测区房屋较多,通视不是很好。
但测区平坦,交通便利,便利了测绘工作的开展。
测区控制范围大致位于东经110°17' 49" - 110°19' 57",北纬25°15' 50" - 25°18' 00" 之间。
二、作业依据和已有测绘资料1、《GPS 与数字化测图实习指导书》2、本次实习《技术设计书》3.中华人民共和国建设部标准《全球定位系统城市测量技术规程》。
4.国家测绘局颁布的《全球定位系统(GPS )测量规范》(CH2001-92)。
城市各级GPS 控制网平均边长 表1(单位:km )等级 C D E 一级 二级 平均距离 10~15 5~10 2~51 〈1城市各级GPS 控制网最弱边相对中误差 表2等级 固定误差a比例误差b最弱边相对中误差C 10 5 1/120000D 10 10 1/80000E 10 20 1/45000 一级 10 20 1/20000 二级 15201/10000表3:级别相邻点基线分量中误差 相邻点间平均距离 /km 水平分量 /mm 垂直分量 /mmB5 10 50 C 10 20 20 D 20 40 5 E20 40 3三、坐标系的选择中央子午线精度为111°,测区投影分带为6°带的第19带,3°带的第38带。
GPS网的无约束平差平面坐标系统选用WGS-84坐标系,高程采用85黄海国家高程基准。
横轴加常数500000m。
GPS的约束平差选择桂林本地的自建坐标系统和无大地水准模型的椭球,卫星星历采用广播星历。
GPS控制网的布设及分析

GPS控制网的布设及分析摘要:通过对岳口镇地籍调查中gps控制测量的实例的分析,对数据进行系统的整理和对比,得出了重要结论:在d级gps工程网中,观测时间越长,基线和点位精度越高,但当所延长的测量时间段内影响基线解算的误差因素较大时,基线精度反而可能会降低。
1、引言2、控制网的布网方式及原则2.1控制网的布网方式(1)跟踪站式,(2)会战式,(3)多基准站式,(4)同步图形扩展式,(5)星形布网方式。
2.2控制网的布设原则(1)效率优先原则:在进行gps 网的设计时,应采用效率指标来衡量设计方案的效率,以及在采用布网方案作业中所需要的时间、消耗等问题。
(2)高精度性原则:gps 控制网的高精度性是工程测量的基石,也是其最明显的优势之一。
在布设时,要做到高精度性原则:先确定gps 网的网形,再根据gps 网的网形,得到gps 网的设计矩阵b,从而得到gps 网的协因数阵q,由此做到gps 控制网的高精度性原则。
(3)可靠性原则:可靠性原则是gps 控制网布设的重要原则之一。
在进行实际gps 网的设计时,一般采用一种反映gps 网可靠性的数量指标,以达到改善网的质量的目的。
(4)低经费性原则:gps 的布设是一项重要的前期工程,应着重考虑实现较低的经费支出和较高的测量效果的问题。
经费的多少取决于网中点的总数和重复设站率。
3、实例岳口镇实测的gps网共有9个点,用3台trimble 5700接收机进行观测,共观测了8个时段,每个时段长度为60min。
该网的最长边为6788m,最短边为1911m,平均边长为3797m。
gps外业实施方案制定时,主要考虑两个方面,一是技术方面,二是测区环境方面。
技术方面决定了控制网的精度,测区环境方面决定了控制网的作业时间长度、进度和经费。
分一下几个步骤实施:(1)进行技术设计:在大比例尺地形上进行设计,因为控制测量的任务就是布设作为图根控制依据的测图控制网,以保证地形图的精度和各幅地形图之间的准确拼接。
GPS控制网平差总结材料报告材料
西南林业大学《全球卫星定位系统原理》GPS控制网平差实习(2012级)题目静态GPS控制网平差总结报告学院土木工程学院专业测绘工程学号20120456023学生姓名施向文任课教师朱毅西南林业大学土木工程学院测绘工程系2015年07月12 日目录1 实习目的 (1)2 实习任务 (1)3 数据处理依据 (1)4 精度要求 (1)5 已有成果数据 (1)6 数据处理过程 (2)6.1创建作业及数据导入 (2)6.2基线预处理 (2)6.2.1静态基线处理设置 (2)6.2.2处理基线 (3)6.2.3搜索闭合环 (3)6.3设置坐标系 (3)6.4网平差 (3)6.5高程内外符合精度检验 (4)6.5.1内符合精度 (4)6.5.2外符合精度 (4)7 数据处理成果 (4)7.1二维平面坐标平差 (4)7.1.1 平差参数 (4)7.1.2 平面坐标 (5)7.2高程拟合 (8)7.2.1 平差参数 (8)7.2.2 外符合精度 (8)7.2.3内符合精度 (9)8 质量简评 (12)9 总结 (12)静态GPS网平差总结报告1 实习目的通过对静态GPS控制网的数据处理,从实践中加深对理论知识的理解。
通过本次实习还可以熟悉GPS数据处理软件,现在的数据处理基本用软件处理,使用软件也是必备的一个技能。
2 实习任务本次实习的任务:(1)静态GPS外业数据基线预处理,预处理基线的方差比应尽量调整在99.9,处理后搜索闭合环要基本合格。
(2)选择/建立坐标系,建立昆明87坐标系。
(3)输入已知点并进行网平差,检测内外符合精度。
(4)撰写数据处理总结报告。
3 数据处理依据依据《卫星定位城市测量技术规范CJJ/T 73—2010》备案号J990—20104 精度要求二维平差中误差1cm高程拟合中误差2cm高程内符合中误差3cm高程外符合中误差5cm5 已有成果数据(1)静态GPS外业数据成果(RINEX)(2)已知点的三维坐标,坐标成果见下表表1 已知控制点坐标点号X(m)Y(m)H(m)TSB 670004.152 899913.8943 1009.044DJYK 652213.658 898844.48 1375.791H127 655917.673 909706.419 1108.928IV01 670404.9398 901947.6586 1315.4534IV02 667931.4052 900542.1124 1005.1517IV03 668521.1755 899377.7047 1151.3336IV04 666437.0717 902176.1222 982.3909IV05 664666.8748 900615.7946 1066.561IV06 665733.8472 899464.8511 1317.1118IV07 667009.0735 900121.3268 1097.8123IV08 665263.708 897821.5395 1450.8807IV09 663985.2496 898502.3019 1482.0786IV10 666699.5746 897145.7693 1323.7646 数据处理过程数据处理使用中海达HDS2003数据处理软件包6.1创建作业及数据导入新建项目包括项目基本信息和项目属性。
gps测量实训总结

gps测量实训总结
在GPS测量实训中,我学到了许多关于全球定位系统的知识和技能,并且在
实践中取得了一定的成果。
以下是我对这次实训的总结和体会。
首先,GPS测量实训让我对全球定位系统有了更深入的了解。
在实训中,我学
会了如何使用GPS设备进行测量,包括设置测量参数、选择测量点、记录数据等。
我还学习了如何对采集到的数据进行处理和分析,以获取准确的测量结果。
通过实际操作,我对GPS的工作原理和测量方法有了更清晰的认识,这对我今后的工作
和学习都将有很大帮助。
其次,实训中我还学会了团队合作和沟通的重要性。
在实训中,我们需要分工
合作,共同完成测量任务。
在这个过程中,我学会了如何与同伴进行有效的沟通和协作,以达到更好的测量效果。
团队合作不仅提高了工作效率,也增强了我们之间的信任和友谊,这对我们今后的工作和生活都是非常重要的。
最后,通过这次实训,我也发现了自己的不足之处。
在测量过程中,我遇到了
一些问题和困难,比如测量精度不够高、数据处理出现错误等。
这让我意识到自己在GPS测量方面还有很大的提升空间,需要更加努力学习和实践,不断提高自己
的技能水平。
总的来说,这次GPS测量实训让我收获颇丰。
我不仅学到了专业知识和技能,还锻炼了团队合作和沟通能力,同时也发现了自己的不足之处。
我相信这些经验和收获将对我的未来发展产生积极的影响,我会继续努力学习和提升自己,为将来的工作做好准备。
兰州交通大学gps实习总结
兰州交通大学gps实习总结兰州交通大学gps实习总结GPS测量技术总结一、实习目的GPS静态测量本次GPS静态观测实习的目的是巩固、扩大和加深我们从课堂上所学理论知识,获得测量工作的初步经验和基本技能,着重培养我们的独立工作能力,进一步熟练掌握测量仪器的操作技能,提高运用理论及计算能力,并对GPS静态观测全过程有一个全面和系统的认识。
熟悉GPS静态相对定位原理、Sounth、Trimble、ashtech三种GPS接收机的使用掌握GPS网的网形设计。
熟悉GPS静态测量的步骤。
学会南方测绘Gps数据处理软件的简单使用。
1.1实习安排准备好理论知识,掌握控制测量的技术要求,以及仪器的使用规范及过程,协调好分组的搭配。
仪器调度表(略)第二组组长:孙瑞第二组组员:张凯郑聪旺郭高孙前亮赵勇智王力赵宝铎陈建玺赵亚强田斌1.2实习任务以各个班为单位建立测量实习队,10人一组(第三组为11人),分3组。
每组领取GPS一套(包括主机、脚架、基座、连接线等)、记录板一块、对讲机、记录表。
根据中华人民共和国测绘行业标准《全球定位系统城市测量技术规程》和石桥子经济开发区的具体情况,建立E级GPS网。
E级GPS网的精度要求如下表:级别固定误差(mm)平均边长(km)比例误差系数(mm)E≤100.2~5≤20每小组利用各组领取到的接收机对两个控制点进行观测,观测时段为一小时,观测2个时段。
1.3测量规范1、《全球定位系统(GPS)测量规范》(GB/T18314-202*)。
2、《全球定位系统城市测量技术规范》(CJJ73-97)。
3、CH1002-95《测绘产品检查验收规定》。
4、CH1003-95《测绘产品质量评定标准》。
1.4测区概况本测区为本校九教东西方向的荒地,那里有许多施工剩下的土堆地形复杂1.5GPS网的布设GPS网设计的出发点是在保证质量的前提下,尽可能地提高效率,努力降低成本。
因此,在进行GPS的设计和测量时,既不能脱离实际的应用需求,盲目地最求不必要的高精度和高可靠性;也不能为追求高效率和低成本,而放弃对质量的要求。
浅谈GPS控制网的技术设计
级 别 A A A 30 o B , 0 C 1 0~l 5 D 5一l 0 E 0 2— . 5
平 均 距 离 l0 Oo
G S测量规范和规 程通 常都是 针对一 般情况 制定 ,所 P 以在特殊情况下 ,测量单位仍需按照测量任务书或测量合同 中的技术要求单独进行技术设计 。例如在大坝变形观测 中,
要】 主要 阐述 了在 G S控制 网测 量 中, P 如何进行控制 网的技 术设计 。介 绍了 G S控制 网技术设 P
计的一般原则、 基准设计和网形设计 , 以及技 术设计 的注意事项。 【 关键词 】 G S 控 制网; 技术设计 ; 基准设计 ; 网形设计 P; 【 中图分类号】 P 2. 2 84
维普资讯
浅 谈 G S控制 网 的技 术设 计 P
.
沙 尚典 乔建 林 , ,
(.西南交 通大 学土木 工程学 院 , t 1 N3成都 603 ;.江 苏博学 建设工 程有限 公 司 , l 10 12 江苏南 京 200 ) 100
【 摘
量 规 程 及 细则 。 ]
1 2 技 术 设 计 的 一般 原 则 .
固定 误 差 ( mm)
≤: 3 ≤: 5 ≤: 8 ≤l 0 ≤l 0 ≤l O
比 例误 差 ( p pm)
40 01 ≤0 l ≤l ≤5 ≤l 0 ≤2 O
[ 收稿 日期 ]20 0 0 7— 4—3 O
展的需要 ,还可 以根据 具体 情况 扩展 G S控 制 网的功 能。 P
如有 的城 市 和 矿 区 G S网既 可 以 为 工 程 建设 服 务 ,又 可 以 P 作 为 变形 监 测 网。
铁法矿区GPS平面控制网改造技术分析
原 铁 法 矿 区 控 制 网是 二 十 世 纪 八 十 年 代 建 立 的 ,到 目前 ,原 网大 部分 点遭 到 了破坏 ,致使 矿 区 各 项测量 工作 难 已开 展 ,威 胁 到 煤 矿安 全 生 产 ,需
1 项 目概 况
1 1 矿 区控 制 网 控 制 范 围 .
尽 快对该 网进 行改 造 与完善 ,由 于该 网控 制 规模 较
技术 具有精 度 高 、效 率 快 、全 天候 作 业 等优 点 ,可
以快 速 、高精度 的完 成控 制 网 的改 造 工作 。本文 依 据铁 法矿 区控 制 网现 状 。分析 了控 制 网改 造 的必 要 性 及应 用 G S技 术改 造控 制 网的优 势 。提 出了改 造 P 控 制 网的方 案 、原 则 。应用 G S技术 实现 了控 制 网 P
在原 控 制 网 中 ,所 建 的钢 标 有 3 8座 破 坏 、丢 失 ,破 坏 率 达 8 % ;标 石 破 坏 率 达 3 . % 。从 控 8 17 制 网的整 个 网形 看 ,破 坏 的 点 都 是 网 中 的 如 今 矿 区 生产 规 模 的扩 大 及
大 ,采用 常规 方法周 期 长 、耗 资 大 。G S卫 星 定位 P
铁 法矿 区控 制 网测 区范 围 内有 铁 煤集 团七 对 生 产矿 井 ,位 于 东 经 13 3 7 一13 4 5 、北 纬 2 。 10 ” 2 。 15 ” 4 。O3 ” 4 。32 ” 2 2 9 一 2 3 O 之间 。改 造后 的铁法 矿 区平 面 控制 网 ,以原 铁 法矿 区三 等平 面控 制 网 为框 架 ,根 据采 煤沉 陷情 况及 采煤 规 划部 署 。除利 用 原点 位 重 新 埋设 点外 ,再根 据各个 矿 井 需要 ,在 范 围 内布 设 四等点 。整 网控制 面积 约 3 0k 0 m 。 12 原控 制 网概况 . 1 2 1 原控 制 网精 度情 况 . .
E级GPS控制测量技术总结
※分类号:教材新校区控制点测量E级GPS控制测量技术总结编写单位名称:11 土管01班第三组2013年1 月6 日编号:01密级:秘密、测区概况本次实习要求通过GPS定位测量综合训练,掌握布设GPS控制网的方法,培养自身的测量能力,熟悉GPS技术。
能使用GPS 进行静态数据的采集并且数据处理,可以完整的整理出坐标数据。
本次实习的范围为江西应用技术职业学院黄金校区,先布设E级GPS控制网,在测区内布设了5个GPS空制点,再进行GPS控制测量。
黄金校区地势平坦,视野开阔,是一个基本无干扰的测区,所以此次实习较为简单。
二、作业依据1、CH 2001-92《全球定位系统(GPS测量规范》2 、CJJ 73-97 《全球定位系统城市测量技术规程》3 、CH 1002-95《测绘产品检查验收规定》4 、CH 1003-95《测绘产品质量评定标准》5 、CJJ 8-85 《城市测量规范》三、坐标系的选择和已有资料利用情况本次实习采用1980西安坐标系,高程系采用1985年国家高程基准。
此次测量任务利用分布在第三食堂和校门口两个已知点,经过对这两点的分析可知,这两点的坐标系统与此次测量所用坐标系统相同,点位保存完整,精度及等级也能达到本次测量要求,无需进行换带计算。
只需将此已知数据引入测区即可。
四、作业流程1 、仪器设备和软件GPS空制测量采用3台中海达双频GPS接受机(标称精度5mm+1pmmD, D以Km计),为双頻接收机,其静态相对定位精度为:静态基线±( 5mm +1ppm)D高程±( 10mm+2ppm)D中海达GPS测量系统配备有星历预报软件(可预报30天内测区各测点一天24 小时的卫星分布状况及健康状况)、solution 后处理解算软件(包含数据传输、基线向量处理、GPS网平差软件、多种GPS数据格式转换等功能),完全能满足GPS空制测量数据处理的要求。
2、E级GPS网的设计和观测(1)GPS布网充分利用GPS测量的优点,实测GPS空制点5个,其中已知点2 个,未知点3 个,组成最小同步环3 个,多边形异步环3 个(计算选取)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPS平面控制网技术总结班级:测绘工程091班姓名:李天赐学号:200903227学校:兰州交通大学目录GPS平面控制网技术总结 (2)1 概况 (2)1.1测区已有控制资料及利用情况 (2)1.2 坐标系统和高程系统 (2)2 GPS控制网的布设 (2)2.1 GPS控制网的布设方案及要求 (3)2.2 选点、埋石 (3)2.3 GPS网的主要指标 (3)3 GPS外业数据采集 (3)3.1所用仪器 (3)3.2 仪器检验 (3)3.3 GPS测量作业的基本技术要求 (4)3.4 作业过程 (4)4 GPS基线向量的解算及检核 (4)4.1 GPS基线向量的解算 (4)4.2 精度统计 (5)5 GPS网的平差处理 (5)5.1 无约束平差 (5)5.2 约束平差 (5)6. 结论 (5)7 提交资料 (6)8 体会 (6)GPS平面控制网技术总结1 概况GPS卫星定位技术是一项多功能、高效、快速、省时和高精度的定位技术,已在国内外测量界得到推广和应用,特别在城市控制测量、工程测量和地籍测量中得到广泛应用。
为了满足我院测绘工程专业学生教学实习和学院建设的需要,在兰州交通大学校园内建立了D级GPS控制网。
该控制网使用3台Unistrong双频GPS接受机进行外业观测。
本控制网利用以前埋设的控制点,由学生完成选点、网的技术设计、外业观测、数据处理工作,前后历时7天,于2011年12月16日前完成全部工作。
1.1测区已有控制资料及利用情况(1)已收集到的地形图资料有校园示意图。
(2)控制点资料。
测区内已经搜集到的控制点资料有:地方独立坐标系下的GPS D级点2个。
其坐标数据如表1所示:表1 已知点坐标和高程1.2 坐标系统和高程系统测区位于高斯3度投影带第34带,中央子午线经度为102°。
平面坐标系采用地方独立坐标系,投影面为参考椭球体;高程系统采用1985国家高程基准。
2 GPS控制网的布设2.1 GPS控制网的布设方案及要求(1)以D级GPS控制网作为首级控制,本GPS控制网以同步环为基本单元,采用边连接的方式布网,将2个已知点和2个待定点连接成如下网形:(网型附后)(2)D级GPS控制网的最长边为294.603m,最短边为136.848m,平均边长为225.976m。
图形结构较好。
本网共布设4个点,其中2个已知点为兰州交通大学地方独立坐标系下的D级GPS点,2个未知点为D级GPS点。
(3)GPS控制网中联测了2个地方独立坐标系下的D级GPS点,以便将GPS定位结果转换至地面坐标系时作为起算数据。
2.2 选点、埋石在测区范围内共布设了12个控制点,选择其中4个点作为D级GPS点,在点位选择上主要考虑点位分布合理,密度均匀,而且便于直接使用。
根据GPS测量规范要求,首先充分利用原有控制点点位标石;其次点位应选在视野开阔、点位周围高度角大于15度以上天空无障碍物(如树林、高楼、水塔及高程建筑物等)的地方;无强烈反射无线电波的金属或其它障碍物或大范围水面,点位远离强功率电台、电视发射塔、微波中继站、高压变电所等要求。
因此,我们将4个GPS点布设在校园内人行道、交叉路口上等合适的地方,每个点位均做到稳固可靠,便于到达,使用方便,可长期保存。
各点均已埋设标石,各GPS 点位见网图和点之记。
2.3 GPS 网的主要指标E 级网共设计9个测点,其中已知点2个,新建GPS 点7个。
共设计6个时段,设站1次的有2个,设站2次的有5个,设站3次的有2个,重复设站次数为2,大于《规范》规定的≥1.6的要求。
网型结构的主要指标见表2。
表2 D 级GPS 控制网的网型结构的主要指标3 GPS 外业数据采集 3.1所用仪器 使用3台高精度的测量型静态中3台Unistrong 双频GPS 接收机以静态定位方式进行同步观测。
该机具有12个通道、测量相量为L1载波相位,其内存为64MB ,采样间隔设为15秒,标称精度5mm+1pmm·D,D 以Km 计为单位。
3.2 仪器检验3.2.1 GPS 接收机的检视总点数基 线 总 数独立 基线总数 必 要 基线总数 多 余观测数 复 测基线数 同步环个 数 观 测时段数 4 18 4 333 33一次设站点数 二次设站点数三次设站点 数边长/km最长边 最短边 平均边长2220.294 0.1368 0.2259仪器在使用前,按规程规定的项目,分别按一般检视和实地检验进行了全面检验。
3.2.2 一般检视(1)接收机及天线型号应正确,主机与配件齐全;(2)接收机及天线外观应良好,各部件及附件完好;(3)设备使用手册及后处理软件手册及软盘齐全。
3.2.3 通电检验(1)各信号灯工作正常;(2)按键和显示系统正常;(3)接收机锁定卫星时间快慢,接收机信号强弱及信号失锁情况正常。
3.2.4 实测检验在GPS接收机完成了一般检视和通电检验后,又进行了实测检验,经计算符合要求。
3.2.5 用于天线基座的光学对点器在作业过中进行了经常性检验,以确保对中的准确性。
3.3 GPS测量作业的基本技术要求GPS测量作业的基本技术要求如表3所示。
表3 基本技术要求3.4 作业过程3.4.1观测前准备(1)每天出发前检测电池容量是否充足,并携带备用干电池。
仪器及其附件应携带齐全。
(2)作业前应检测接收机内存是否充足。
3.4.2 天线安置:严格对中、整平,对中误差小于2mm。
外业记录包括:测量员、点名、点号、观测日期、观测起止时间、天线高等基本要素。
3.4.3 观测:同步观测健康卫星数≥4,卫星高度角≥15°,数据采样率为15秒,观测时段长度根据观测精度指示灯的要求确定,当边长≤10公里时,观测精度指示灯闪两下即可,点位几何PDOP图形强度因子≤6。
3.4.4 量取仪器高:测前测后分别在个3个方向(每个方向间的夹角为120度)量取仪器高,互差小于3mm。
取其中数作为测前测后的仪器高,然后取测前测后的平均值作为最终结果。
3.4.5测站间联系测站间用对讲机联系,同时开机,接收机开始记录数据后,作业员要经常观察卫星个数、记录情况、电池电量和精度指示灯等,只有各测站精度指示灯都亮并符合要求后;才能结束观测,但时间不能少于60分钟。
4 GPS基线向量的解算及检核4.1 GPS基线向量的解算GPS基线向量的计算采用Spectra Precision Survey Office随机软件进行基线解算和数据处理。
对当天采集的数据在当天晚上及时地传输到计算机中,并检查外业记录和输入点号、点名、测前和测后的天线高度是否有误。
对同步环、异步环(独立边构成的闭合环)、闭合差及复测基线进行检查,以便发现不合格的成果,发现超限时应分析查明原因,根据情况决定淘汰、重测或补测措施。
该网各条基线均符合精度要求。
4.1.1基线解算中的起算点坐标为宿迁地方独立坐标系下的GPS D级点。
4.1.2本网采用符合要求的双差固定解作为基线解算的最终结果。
4.1.3基线解算内容包括解求当天时段的所有同步基线,并进行同步环检验工作,以检验外业数据的正确性和可靠性,并进行不同时段间基线的比较,包括异步环检验和复测基线的比较,以检验不同时段间外业数据的一致性,以便检验出基线观测数据中是否存在粗差。
4.1.4同一时段观测值基线处理中,数据的剔除率为10%,《规范》规定其值宜小于10%,D级网共观测基线18条,实际参加平差的为14条。
4.2 精度统计全网基线解算后,计算出同步环、异步环和复测基线闭合差及其限差。
4.2.1同步环闭合差D级网共生成52个同步环,各环闭合差4.2.2异步环闭合差4 .2.3复测基线闭合差由以上统计数据知,兰州交通大学GPS测量控制网外业观测数据质量较好。
5 GPS网的平差处理5.1 无约束平差为全面考察GPS网的内部符合精度,首先进行无约束平差,以符合各项质量检验要求的独立基线组成的闭合图形和三维基线向量及其相应的方差协方差阵作为观测信息,进行GPS网的无约束平差。
经无约束平差检验,没有明显粗差。
5.2 约束平差5.2.1 起算点的选取由于宿迁地方独立坐标系下2个已知点精度较高,故D级网选取这2个已知点作为起算点,作为强制约束的固定值,也可作为加权观测值统一进行二维约束平差。
网中2个待定点的坐标和高程已知,平差得到的点的坐标可以与之比较。
平差计算采用随机软件完成。
选取独立基线构成GPS网,进行网的二维约束平差计算。
5.2.2二维约束平差后的统计结果二维约束平差后的统计结果如下:D级网的点位精度由上表可知:D级网的点位精度较好。
6. 结论(1)第五小组GPS网从点位普查、选点、埋石、外业数据采集到数据处理历时2天,其效率是常规方法难以达到的。
(2)学院D级GPS网平均边长为225.976m,进行二维约束平差后,其最大点位中误差为1.8mm,其最弱边相对中误差为1/115165,满足D级网的精度要求。
7 提交资料(1)技术总结。
(2)GPS网布设图。
(3)GPS外业观测记录(测量手簿)。
(4)GPS基线解算成果。
(5)学院GPS网的地方坐标系坐标成果。
8 体会在这次实习中,我们学到了不少东西,每次实习都会让我们知道很多书本学不到的知识,让我们跟多了解实践中应该怎么做,如何做,遇到困难如何解决,如何可以做的更好,如何可以更方便快捷的完成任务,我这次制作的是国家D级GPS,我更全面的了解了GPS控制网的制作过程,在实习的过程中,也养成了小组分工和合作的精神,良好的团队精神可以有很大的效率的提高,以及工作的愉悦,可以让人更好的完成任务的质量。
通过这次学习,我们学到了很多知识,合作交流的知识和熟悉了GPS的运用。
特别是遇到困难时,解决问题的精神GPS网略图基线处理报告观测开始到解类型水平精度(m)垂直精度(m)大地方位角椭球距离(m)高度(m)GPS4 --- GPS1(B34)GPS1 GPS4 固定0.004 0.005 303°17'21"218.249 1.448 GPS4 --- GPS1(B32)GPS1 GPS4 固定0.040 0.045 303°17'05"218.229 1.400 GPS3 --- GPS1(B28)GPS1 GPS3 固定0.010 0.013 329°10'26"294.515 3.630 GPS3 --- GPS1(B24)GPS1 GPS3 固定0.011 0.014 329°10'26"294.513 3.631 GPS3 --- GPS1(B36)GPS1 GPS3 固定0.004 0.005 329°10'28"294.509 3.647 GPS2 --- GPS1 GPS1 GPS2 固定0.010 0.013 11°58'53" 242.893 6.087验收概要GPS点派生用于计算点的测量数据:GPS2 精度置信水平:95%GPS矢量平均矢量限差(m) 最大平均水平限差:0.050 最大平均垂直限差:0.080GPS4 → GPS2水平精度(m) 垂直精度(m) 长度(m) DX(m) DY(m) DZ(m) GPS2 --> GPS4 (PV33) 0.004 m 0.007 m 261.087 m 210.695 m 119.081 m -97.946 m GPS3 → GPS2长度(m) DX(m) DY(m) DZ(m) 平均: 201.987 m -198.254 m -37.081 m -10.916 mσ: 0.000 m 0.000 m 0.000 m残差水平(m) 垂直(m) 3D(m) DX(m) DY(m) DZ(m) GPS3 --> GPS2 (PV31) 0.000 m 0.000 m 0.000 m 0.000 m 0.000 m 0.000 m GPS3 --> GPS2 (PV26) 0.000 m 0.000 m 0.000 m 0.000 m 0.000 m 0.000 m GPS3 --> GPS2 (PV27) 0.000 m 0.000 m 0.000 m 0.000 m 0.000 m 0.000 m GPS3 --> GPS2 (PV30) 0.000 m 0.000 m 0.000 m 0.000 m 0.000 m 0.000 m 数据水平精度(m) 垂直精度(m) 长度(m) DX(m) DY(m) DZ(m) GPS3 --> GPS2 (PV31) 0.010 m 0.014 m 201.987 m -198.254 m -37.081 m -10.916 m GPS3 --> GPS2 (PV26) 0.010 m 0.014 m 201.987 m -198.254 m -37.081 m -10.916 m GPS3 --> GPS2 (PV27) 0.010 m 0.014 m 201.987 m -198.254 m -37.081 m -10.916 m GPS3 --> GPS2 (PV30) 0.010 m 0.014 m 201.987 m -198.254 m -37.081 m -10.916 mGPS1 → GPS2长度(m) DX(m) DY(m) DZ(m) 平均: 243.029 m -16.939 m -143.254 m 195.587 mσ: 0.004 m 0.010 m 0.011 m残差水平(m) 垂直(m) 3D(m) DX(m) DY(m) DZ(m) GPS1 --> GPS2 (PV23) 0.005 m 0.009 m 0.011 m -0.003 m -0.009 m -0.004 m GPS1 --> GPS2 (PV22) 0.007 m 0.005 m 0.009 m 0.007 m -0.006 m 0.001 m GPS1 --> GPS2 (PV19) 0.018 m 0.035 m 0.040 m 0.011 m 0.030 m 0.023 m数据水平精度(m) 垂直精度(m) 长度(m) DX(m) DY(m) DZ(m) GPS1 --> GPS2 (PV23) 0.010 m 0.013 m 243.027 m -16.936 m -143.245 m 195.591 m GPS1 --> GPS2 (PV22) 0.022 m 0.028 m 243.025 m -16.945 m -143.248 m 195.586 m GPS1 --> GPS2 (PV19) 0.023 m 0.032 m 243.029 m -16.950 m -143.284 m 195.564 m坐标来源东距(m) 北距(m) 高程(m) 高度(m) 已平差(全局)0.213 m-0.683 m1492.813 m 1492.813 m全局(GPS23420.11O) 0.000 m 0.000 m 1494.193 m 1494.193 m全局(GPS23421.11O) 0.000 m 0.000 m 1494.193 m 1494.193 m全局(GPS23423.11O) 0.211 m -0.683 m 1492.804 m 1492.804 m点合成坐标:GPS1东距北距高程高度-50.220 m-238.286 m1486.723 m 1486.723 m 数据用来计算状态D东(m) D北(m) 距离(水平)(m) D高程(m) D高度(m) 已平差(全局)NEeh 启用0.000 m0.000 m0.000 m0.000 m 0.000 mGPS2 → GPS1启用-0.003 m0.000 m0.003 m-0.012 m -0.012 mGPS3 → GPS1启用0.000 m-0.002 m0.002 m0.000 m 0.000 mGPS4 → GPS1启用0.002 m0.001 m0.002 m0.002 m 0.002 m 全局(GPS13420.11O) 启用0.003 m -0.092 m 0.092 m -3.224 m -3.224 m 全局(GPS13423.11O) 启用 3.627 m -6.694 m 7.613 m -15.215 m -15.215 m 全局(GPS13422.11O) 启用0.126 m -1.806 m 1.810 m -5.421 m -5.421 m 全局(GPS13421.11O) 启用0.003 m -0.093 m 0.093 m -3.224 m -3.224 m 用于计算点的测量数据:GPS1精度置信水平:95%GPS矢量平均矢量限差(m) 最大平均水平限差:0.050 最大平均垂直限差:0.080GPS2 → GPS1长度(m) DX(m) DY(m) DZ(m)平均: 243.029 m 16.939 m 143.254 m -195.587mσ: 0.004 m 0.010 m 0.011 m 残差水平(m) 垂直(m) 3D(m) DX(m) DY(m) DZ(m) GPS1 --> GPS2 (PV23) 0.005 m 0.009 m 0.011 m 0.003 m 0.009 m 0.004 m GPS1 --> GPS2 (PV22) 0.007 m 0.005 m 0.009 m -0.007 m 0.006 m -0.001 m GPS1 --> GPS2 (PV19) 0.018 m 0.035 m 0.040 m -0.011 m -0.030 m -0.023 m数据水平精度(m)垂直精度(m)长度(m) DX(m) DY(m) DZ(m)GPS1 --> GPS2 (PV23) 0.010 m 0.013 m 243.027 m -16.936 m -143.245 m 195.591 m GPS1 --> GPS2 (PV22) 0.022 m 0.028 m 243.025 m -16.945 m -143.248 m 195.586 m GPS1 --> GPS2 (PV19) 0.023 m 0.032 m 243.029 m -16.950 m -143.284 m 195.564 mGPS3 → GPS1长度(m) DX(m) DY(m) DZ(m)平均: 294.602 m -181.311m106.153 m-206.515mσ: 0.002 m 0.004 m 0.003 m 残差水平(m) 垂直(m) 3D(m) DX(m) DY(m) DZ(m) GPS1 --> GPS3 (PV28) 0.005 m 0.012 m 0.013 m 0.006 m -0.010 m -0.005 m GPS1 --> GPS3 (PV24) 0.003 m 0.010 m 0.010 m 0.004 m -0.008 m -0.004 m GPS1 --> GPS3 (PV36) 0.002 m 0.005 m 0.006 m -0.003 m 0.004 m 0.002 m 数据水平精(m) 垂直(m) 长度(m) DX(m) DY(m) DZ(m) GPS1 --> GPS3 (PV28) 0.010 m 0.013 m 294.606 m 181.317 m -106.163 m 206.510 m GPS1 --> GPS3 (PV24) 0.011 m 0.014 m 294.604 m 181.315 m -106.161 m 206.510 m GPS1 --> GPS3 (PV36) 0.004 m 0.005 m 294.600 m 181.308 m -106.149 m 206.517 m GPS4 → GPS1长度(m) DX(m) DY(m) DZ(m)平均: 218.305 m -193.744m24.169 m -97.653 mσ: 0.002 m 0.004 m 0.003 m 残差水平(m) 垂直(m) 3D(m) DX(m) DY(m) DZ(m) GPS1 --> GPS4 (PV34) 0.000 m 0.000 m 0.000 m 0.000 m 0.000 m 0.000 m GPS1 --> GPS4 (PV32) 0.026 m 0.048 m 0.055 m -0.002 m -0.025 m -0.049 m数据水平精度(m)垂直精度(m)长度(m) DX(m) DY(m) DZ(m)GPS1 --> GPS4 (PV34) 0.004 m 0.005 m 218.305 m 193.744 m -24.169 m 97.653 m GPS1 --> GPS4 (PV32) 0.040 m 0.045 m 218.284 m 193.743 m -24.194 m 97.604 m坐标来源东距(m) 北距(m) 高程(m) 高度(m)已平差(全局)-50.220m-238.286 m1486.723m1486.723m全局(GPS13420.11O) -50.222 m -238.194 m 1489.947m1489.947 m全局(GPS13423.11O) -53.846 m -231.592 m 1501.939m1501.939 m全局(GPS13422.11O) -50.346 m -236.480 m 1492.145m1492.145 m全局(GPS13421.11O) -50.222 m -238.193 m 1489.947m1489.947 m点合成坐标:GPS3东距北距高程高度-201.134 m14.621 m1490.365 m 1490.365 m数据用来计算状态D东(m) D北(m) 距离(水平)(m) D高程(m) D高度(m) 已平差(全局)NEeh 启用0.000 m0.000 m0.000 m0.000 m 0.000 mGPS2 → GPS3启用-0.003 m-0.002 m0.004 m0.013 m 0.013 m GPS4 → GPS3启用0.005 m0.005 m0.007 m-0.013 m -0.013 m GPS1 → GPS3启用0.000 m0.002 m0.002 m0.000 m 0.000 m全局(GPS33420.11O) 启用0.196 m 0.224 m 0.297 m -2.881 m -2.881 m 全局(GPS33421.11O) 启用0.196 m 0.224 m 0.297 m -2.881 m -2.881 m 全局(GPS33422.11O) 启用-0.009 m -1.995 m 1.995 m -6.656 m -6.656 m点合成坐标:GPS4东距北距高程高度-232.657 m-118.497 m1488.169 m 1488.169 m 数据用来计算状态D东(m) D北(m) 距离(水平)(m) D高程(m) D高度(m) 已平差(全局)NEeh 启用0.000 m0.000 m0.000 m0.000 m 0.000 mGP S3 → GPS4启用-0.005 m-0.005 m0.007 m0.013 m 0.013 m GPS2 → GPS4启用0.006 m0.004 m0.008 m-0.001 m -0.001 m GPS1 → GPS4启用-0.002 m-0.001 m0.002 m-0.002 m -0.002 m全局(GPS43423.11O) 启用-0.500 m 0.379 m 0.628 m -2.449 m -2.449 m 全局(GPS43422.11O) 启用0.106 m -1.062 m 1.067 m -8.730 m -8.730 m日期:2011-12-29 20:12:12工程:C:\Documents andSettings\Administrator\桌面\1.vceSpectra PrecisionSurvey Office GPS基线矢量列表精度置信水平: 95%矢量ID 起始点ID 终点ID 解类型开始时间持续时间水平精度(m) 垂直精度(m) 椭球距离(m) PV34 GPS1 GPS4 固定2011-12-8 14:36:30 01:08:45 0.004 0.005 218.249平差GPS观测协方差项平差网格坐标GPS网的地方坐标系坐标成果平差大地坐标。