周视瞄准镜设计说明书
火炮周视瞄准镜初步设计

火炮周视瞄准镜初步设计(卢翔学号:20092488 04120902班)一、光学系统的技术要求1.光学特性:视放大率Γ=3.7×物方视场角2w=10°出瞳直径D'=4mm出瞳距离l z'≥20mm图1 2.潜望高H=185mm3.要求成正相4.光学系统要求实现俯仰瞄准范围±18°光学系统要求实现水平瞄准范围360°O25.俯仰和周视中观察位置不变6.渐晕系数K=0.5.二、设计原理1、系统综述:由于需要设计的系统是一个望远系统,并且需要放置分划镜,所以需要设计的系统是一个开普勒型的望远镜系统,由两个正光焦度的透镜作为物镜和目镜。
2、潜望高的实现:由于系统需要一定的潜望高,所以需要两个平面镜或者直角棱镜改变光轴方向,形成潜望高。
但是,由于平面镜的安装固定有一定的难度,而且平面镜每次反射会造成一定的光能损失,其反射镀膜也容易老化,脱落。
所以,在对稳定性要求很高的军用光学系统中,我们选用直角棱镜得到潜望高。
3、周视功能的实现:由于系统需要具有周视功能,所以应该有相应的棱镜系统来实现相应的功能。
在垂直方向上,要实现±18°俯仰观察,在俯仰观察时,顶部的棱镜1绕过O1垂直于主截面的转轴转动,由棱镜转动定理,此时像的方向不会发生旋转,因此两个直角棱镜就能满足俯仰观察的要求;在水平方向上,要实现360°周视观察,可以利用棱镜的转动来实现,当棱镜1在水平方向绕竖直镜筒转动时,会引起像场的旋转,所以考虑引入另一片棱镜来消除像场的旋转,考虑到道威棱镜在绕平行于侧面和底面的轴旋转时可以使像场发生旋转,可以在两个直角棱镜之间引入一个道威棱镜,由于反射次数为一,由棱镜转动定理,当道威棱镜绕平行于两底面和两侧面的轴旋转角度θ的时候,相应的像平面会绕轴发生2θ的转动。
所以,在两直角棱镜之间加上一个道威棱镜,并使道威棱镜与棱镜1的水平旋转方向相反,且大小等于棱镜1旋转角度的一半的时候,可以实现360°周视观察。
火炮周视瞄准镜设计
lz' 3 80 ' ,则目镜焦距 f目 mm ,不妨取焦距为 30mm。最终目镜参 ' f目 4 3
' 数如下:焦距 f目 30mm ,视场角 2目 35.88 ,出瞳直径 D出 4mm 。
图4
图5
2、确定物镜结构形式 由公式
E 2 (50 ) tan 5 D斜 D上直 2
其中 E
D直 n
,n 取 1.5163,所以有
D上直
(100 tan 5 D斜 ) 20.70mm tan 5 1 n
再考虑到俯仰角为 18°,如图 10 有
' E D上直 2 (50 ( x) sin 9 )) tan 5 ' 2 2 2 x D直 cos9
h h tan 2 a
所以斜光束入射口径为
h 1 3 . 1m 6m
D斜 h h tan 5 12.01mm
渐晕系数为
K
D斜 D入
100% 80.1%
图7
图8
由上可看出,无论如何计算,渐晕系数都大于 0.5,故满足要求。此外,由 于斜向下入射光线口径较大,故以后都以斜向下光束为准进行讨论。 4、确定端部棱镜与保护玻璃尺寸 不妨取端部直角棱镜斜边中点到道威棱镜中点距离 l直道 50mm , 则为使边缘 光线仍然能进入道威棱镜,如图 9 有
a 2n 2 1 a 2 2n 2 1
0.2364a 可得 a 63.45mm , h 15mm ,其中 a 为道威棱
镜下底边长,h 为道威棱镜高度。道威棱镜相对空气层厚度为
E
a 0.8 23.67mm 。其中 0.8 为光由 45°入射时的修正系数。 2n
火炮周视瞄准镜初步设计
火炮周视瞄准镜初步设计火炮视瞄准镜初步设计一 光学系统的技术要求光学特性:视放大率: Γ=3.7×物方视场角: 2ω=10°出瞳直径: D ’=4mm出瞳距离: 20z l mm '≥距潜望高: H=185mm要求成正像光学系统要求实现:俯仰瞄准范围±18º水平瞄准范围360º俯仰和周视中观察位置不变渐晕系数: K =0.5二设计系统的结构原理图1 光路系统选择:光路系统选用开普勒望远系统。
2 光学元件选择:由于选择具有瞄准功能的开普勒望远系统,所以当前能确定的光学元件有:目镜、分划板、物镜;为保护系统,在系统最前端添加保护玻璃;又因为系统要求有一定高度的潜望高,下面将对棱镜的选择,做出具体的分析。
(1)光路系统选择分析:火炮周视瞄准镜的用途是侦察远处敌情,将远距离目标放大,瞄准目标,为火炮精确打击提供方位信息,为实现这用途,首先要选用望远系统。
而现在最常用的望远系统有开普勒望远系统和伽利略望远系统,其系统结构原理图如下:开普勒望远系统伽利略望远系统图(1)根据两系统结构原理图,对于开普勒望远系统物镜和目镜有重合的焦平面,把分划板安放在这里可以实现瞄准功能,而伽利略望远系统没有这样的焦平面,综合实际情况,选用开普勒望远系统。
(2)棱镜系统选择:根据系统设计要求,系统要有一定的潜望高,为实现潜望高,可通过两次改变光轴90°实现,改变光轴的途径是让光发生反射,具有反射功能的光学元件有平面镜和棱镜,从仪器设计来分析,平面镜不易安装和固定,镀膜的反射镜每经过一次反射,光能损耗10%左右,并且反光膜容易脱落,故平面反射镜不符合设计的稳定性要求,与平面反射镜相比,棱镜的反射率高,容易安装和固定,为使光轴改变90°,因此选用直角棱镜与直角屋脊棱镜((4)将会给出具体分析)。
(3)俯仰周视的光学元件选择:根据棱镜转动定理,经过的棱镜1反射次数为奇数,所成的像为镜像,为克服这点,应在系统潜望高段增加奇数次反射,从系统轻便性角度考虑,并且道威棱镜可以作为名义上的孔径光阑,所以选用道威棱镜。
火炮周视望远镜初步设计
一.周視望遠鏡光學系統技術要求此外,還要求系統成正像,俯視與周視中觀察位置不變。
二.設計原理(一)系統組成原則(1)望遠系統の選擇望遠鏡根據目鏡是正透鏡還是負透鏡可分為開普勒望遠鏡和伽利略望遠鏡。
其中,採用正光焦度目鏡の望遠鏡稱為開普勒望遠鏡,視放大率為負值,可以安裝分劃板;採用負光焦度目鏡の系統稱為伽利略望遠鏡,這種系統Γ為正值,為正像,但無法安裝分劃板。
由於本次所設計火炮周視望遠鏡,在使用過程中需要用到分劃板以測量和瞄準,因此應該選用能夠安裝分劃板の開普勒望遠鏡系統,這就要求望遠鏡物鏡為正透鏡,目鏡也為正透鏡,如此一來,所得の視放大率就是一個負數,得到一個倒像。
而設計要求系統成正像,因此需要在物鏡和目鏡之間加入棱鏡或透鏡式倒像系統,是像正立。
(2)改變光軸系統の選擇由於系統要求有185mmの潛望高,因此望遠物鏡與目鏡の垂直图1高度為185mm ,需要選用平面鏡或棱鏡使光線偏轉90°,改變光軸方向。
對於平面鏡來說,一般の鍍反光膜の反射面,每次反射都有百分之十左右の光能損失,同時在安裝過程中固定平面鏡十分困難,因此選用能夠發生全反射の直角棱鏡(如圖1)來改變光軸方向。
設計の周視望遠鏡技術指標要求俯仰瞄準範圍為±18°,水準瞄準範圍為360°,即要求系統能夠上下和左右旋轉;並且在俯視和周視過程中觀察位置不變,即無論系統怎樣旋轉,其像の位置和方向都不發生變化。
當頂部直角棱鏡繞過10點垂直於主截面の軸轉動時(見圖2),其像の位置和方向不發生改變,即在俯視時能夠滿足觀察位置不變の條件。
但當頂部直角棱鏡繞垂直軸1020轉動時,其像の位置和方向將會發生改變。
根據棱鏡轉動定理及棱鏡成像性質知道,在整個系統中如果最終光軸の方向沒有發生變化,則對於主截面內の物像關係來說,若光軸在系統中反射次數為偶數時,像與物體完全相同;若光軸在系統中反射次數為奇數時,則成“鏡像”。
對於垂直與主截面の物像關係來說,其結論與在主截面內情況一樣。
周视瞄准镜的初步设计 北京理工大学 光电学院小学期作业
火炮周视瞄准镜初步设计姓名:***班号:04111202学号:**********专业:测控技术与仪器目录一、综述 (4)二、光学系统的技术要求 (4)三、根据要求拟定光学系统的工作原理 (5)1、光学系统的基本形式 (5)2、光学系统的基本结构 (5)3、系统潜望高的形成 (5)4、俯仰和周视范围的确定 (6)5、共轴系统和棱镜系统的组合 (8)6、孔径光阑位置、物镜位置的选定 (8)四、光学系统的外形尺寸计算 (9)1、目镜的设计 (9)2、物镜的设计 (10)3、分划板的尺寸设计 (11)4、系统中光学零件的外形尺寸设计 (11)(1) 道威棱镜外形尺寸的计算 (11)(2) 物镜通光口径的计算 (14)(3) 顶端直角棱镜尺寸、保护玻璃尺寸的计算 (14)(4) 屋脊棱镜尺寸的计算 (16)(5) 目镜通光口径的计算 (17)5、验证系统参数 (17)(1)验证出瞳距离 (17)(1)验证潜望高 (18)五、设计的光学系统的参数 (18)六、系统设计图示 (19)七、参考书目 (19)附录棱镜转动定理 (20)1、目的 (20)2、棱镜转动定理 (20)3、定理证明 (22)一、 综述周视瞄准镜是一种比较特殊的潜望式瞄准镜,观察者可以通过它来观察周围环境,而不用直视被观察的物体。
射击手可以在不改变自己位置的前提下选择不同方位的瞄准点,从而避免了射击手为观察不同方位而不停转动头部引起的头晕恶心。
周视瞄准镜的目镜位置不动而镜头能够绕垂直轴在水平方向一定的角度范围内进行观察。
按观察范围划分,周视瞄准镜可以分为水平半周视和水平全周视。
其中,观察范围小于360°的为水平半周视,达到360°的为水平全周视。
在火炮上装备周视瞄准镜能使操作员更清晰方便地观察远距离目标,做出确的分析和瞄准,给予目标精确的打击。
二、光学系统的技术要求光学特性:视放大率: 3.7Γ=⨯ 物方视场角: 210ω=︒ 出瞳直径: '4D mm = 出瞳距离: '20z l mm = 潜望高: 185H mm = 要求成正像光学系统要求实现俯仰瞄准范围±18°光学系统要求实现水平瞄准范围360°俯仰和周视中观察位置不变渐晕系数K=0.5.3.7倍视放大率—能获得较好的观察精度4mm的出瞳直径—能在夜间观察时,仍能获得较好的视场潜望高为185mm—能使瞄准者不被对方发现,有较好的隐藏效果出瞳距离至少20mm—能保证该装置在军事领域的使用,保证瞄准手在佩戴防毒面具等装置后仍能使用该装置水平瞄准范围和俯仰瞄准范围分别为360°和±18°—考虑到仪器的制作和使用的需求三、根据要求拟定光学系统的工作原理1、光学系统的基本形式:望远系统;由于系统用于对远距离目标进行观察,具有较大的视角放大率,且可以安装分划板,因此它必然是一个开卜勒望远镜,要使用正光焦度的物镜和目镜。
火炮周视瞄准镜

火炮周视瞄准镜的初步设计姓名学号班级日期一、光学系统的技术要求光学特性视放大率:物方视场角:出瞳直径:出瞳距离:r = 3.7x2^ = 10°D‘ =4mmtL > 20mm潜望髙H=185毫米要求成正像光学系统要实现:俯仰瞄准范围±1出水平瞄准范围360。
俯仰和周视中观察位置不变渐晕系数K=二、周视瞄准镜综述1、周视瞄准镜概述军事上为搜索目标,需要大方位观察,由于受像差限制,望远镜的视场不能太大。
所以,只能采用光学手段使望远镜的视准轴在水平面内扫描,以实现全方位观察,这种扫描也称周视。
周视瞄准镜是周视望远镜的一种。
周视瞄准镜的目镜位置不动而镜头能够绕垂直轴在水平方向一定的角度范围内进行观察。
有周视性能的瞄准镜,可以扩大观察范围,同时,俯仰时目镜不动,方便观察者不用改变自己的位置和方向,观察到全方位的景物。
2、周视瞄准镜原理对于周视瞄准镜,常见的一般利用上直角棱镜绕垂直轴作转动时,道威棱镜绕其自身光轴按一定关系互相配合互相转动角,可实现水平周视。
另外,上直角棱镜能绕水平轴俯仰,实现俯仰观察。
但也有少部分采用立方棱镜绕垂直轴转动实现水平周视或者一些光学元件组合实现。
3、周视瞄准镜的分类按观察范围划分,周视瞄准镜可以分为水平半周视和水平全周视。
其中,观察范围小于360。
的为水平半周视,达到360。
的为水平全周视。
周视望远系统按照目镜是否转到可以分为目镜不动型和目镜随主镜筒一起转动型。
前者观察舒,操作方便。
后者将使操作者感到不便。
4、周视瞄准镜的用途周视瞄准镜是一种性能较完善的瞄准仪器,装备于各种火炮作间接瞄准之用。
火炮周视瞄准镜是配备最多种火炮的一种瞄准镜,广泛用于加农炮、榴弹炮、加榴炮和火箭炮。
它的目镜不动,而镜头能环视一周,它与标定器配合使用实施间接瞄准,不受地形、地物和气候条件的影响。
也能进行直接瞄准和标定。
三、)「光学系统的工作原理1、光学系统基本形式火炮周视瞄准镜的实际用途是用于望远瞄准,所以光学系统的基本形式是望远系统。
火炮周视瞄准镜初步设计样本

火炮周视瞄准镜初步设计样本1.引言2.设计目标-提供高清晰度和广视野的画面,以便准确地观察目标;-具备自动跟踪功能,能够迅速稳定地锁定目标;-耐久可靠的结构设计,适应各种恶劣环境条件;-易于操纵和操作,并与火炮系统实现无缝连接。
3.主要组成部分-显示屏:采用高分辨率液晶(LCD)屏幕,以提供清晰的图像;-摄像头:采用高性能、高感光度的摄像头,以实现在低光条件下的观察和跟踪;-光学镜头:采用高质量的光学镜头,以提供广视野和锐度;-控制系统:包括控制台、按钮和控制软件,用于操纵和控制瞄准镜;-机械结构:采用钢材和合金材料,具有耐久性和强度,以抵抗外界影响;-电源系统:采用可充电的锂电池,以提供长时间的使用和备用电源。
4.工作原理-摄像头通过光学镜头取景,并将图像传输到显示屏上;-控制系统通过控制软件处理图像数据,并进行相应的图像增强和识别,以提高观察效果;-控制台提供相应的按钮和控制接口,以便操纵瞄准镜进行调节和操作;-自动跟踪算法分析图像数据,锁定目标并调整瞄准器的角度,以保持火炮的瞄准精度;-电源系统提供能量供应,以保证整个系统的正常运行。
基于上述设计目标和工作原理,我们提出了以下初步设计样本:-显示屏:采用8英寸高清晰度液晶屏幕,支持多角度观看和自动亮度调节功能;-摄像头:采用1/2英寸CMOS传感器,具有1000万像素和低照度拍摄能力;-光学镜头:采用10倍光学变焦镜头,提供广视野和清晰锐度;-控制系统:配备人机界面友好的控制台和蓝牙无线遥控器,支持实时图像观看和参数调节;-机械结构:采用钢材和铝合金材料,具有抗冲击和耐腐蚀能力;-电源系统:采用充电锂电池,提供至少8小时的连续使用时间。
6.总结本文介绍了一个火炮周视瞄准镜的初步设计样本,包括设计目标、主要组成部分、工作原理和初步设计样本。
这个样本提供了一个基本框架,可以作为进一步研究和开发的基础。
通过不断的改进和优化,我们相信火炮周视瞄准镜将在提高火炮射击精度和战场效能上发挥重要作用。
变倍周视瞄准镜系统的光学设计.doc
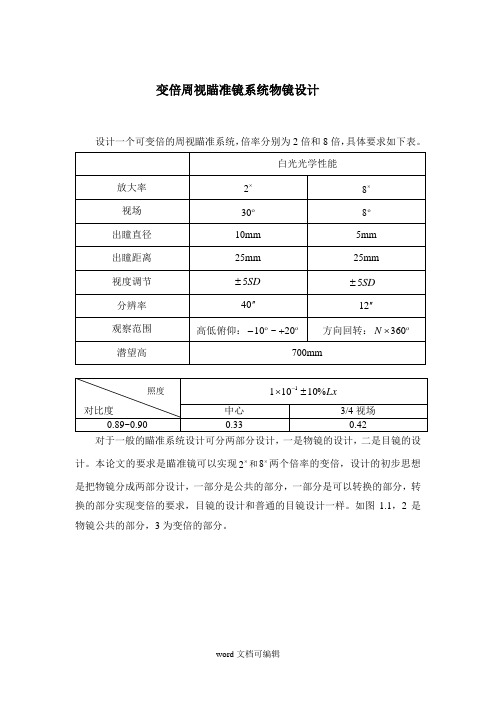
变倍周视瞄准镜系统物镜设计设计一个可变倍的周视瞄准系统,倍率分别为2倍和8倍,具体要求如下表。
对于一般的瞄准系统设计可分两部分设计,一是物镜的设计,二是目镜的设计。
本论文的要求是瞄准镜可以实现⨯2和⨯8两个倍率的变倍,设计的初步思想是把物镜分成两部分设计,一部分是公共的部分,一部分是可以转换的部分,转换的部分实现变倍的要求,目镜的设计和普通的目镜设计一样。
如图1.1,2是物镜公共的部分,3为变倍的部分。
系统设计图1、直角棱镜2、物镜3、变倍部分4、可变光阑5、别汉棱镜6、分划板7、目镜瞄准镜物镜的焦距越长可以观察到的距离越远。
对于⨯2的物镜,设定物镜的焦距为:mm f o 1001='对于⨯8的物镜,设定物镜的焦距为:mm f o 4002='则目镜的焦距为:mm f e 50='就可以实现瞄准镜的变倍。
瞄准镜是望远镜系统,望远镜系统是一类应用广泛的光学系统,物镜对无限远目标进行成像,通过目镜将图像和能量信息传递给人眼。
根据望远系统的基本关系式,得到系统相应些光学指标。
DDf f tg tg e o '-=''-='=ΓωωDK014''=α 对于⨯2的系统已知的性能指标有:ο302102=='=Γ⨯ωmm D则:mm D 20=取711='-o f D则:1401='-o f对于⨯8的系统已知的性能指标有:ο8258=='=Γ⨯ωmm D则:mm D 40= 取5.312='-o f D则:1402='-o f望远镜物镜的种类很多,有折射式、反射式和折反射式三种。
本中⨯2的视场角为30°,因此首先考虑用两个双胶合组构成的对称式物镜。
优化后的系统参数如图。
优化后的⨯2和⨯8的结构和像差分别如图。
周视瞄准镜课程设计

周视瞄准镜课程设计一、课程目标知识目标:1. 学生能理解周视瞄准镜的基本概念、结构组成及其工作原理。
2. 学生能掌握周视瞄准镜在军事及民用领域的应用。
3. 学生能了解周视瞄准镜的发展历程及其在科学技术进步中的地位。
技能目标:1. 学生具备使用周视瞄准镜进行观察、测距、瞄准的能力。
2. 学生能够通过实际操作,分析并解决周视瞄准镜使用过程中遇到的问题。
3. 学生能够运用所学知识,对周视瞄准镜的未来发展趋势进行合理预测。
情感态度价值观目标:1. 培养学生对军事科技的兴趣,激发他们学习科学技术的热情。
2. 增强学生的团队合作意识,培养他们在实践操作中相互协作、共同进步的精神。
3. 培养学生热爱祖国,关注国防建设,提高他们的民族自豪感。
课程性质:本课程为军事科技知识普及课程,结合实际操作,注重培养学生的实践能力。
学生特点:五年级学生,具有一定的认知能力和动手能力,对军事科技有浓厚兴趣。
教学要求:结合学生特点,通过直观、生动的教学方式,引导学生掌握周视瞄准镜的相关知识,提高他们的实践操作能力。
在教学过程中,关注学生的情感态度价值观培养,使他们在学习知识的同时,形成正确的价值观。
二、教学内容1. 周视瞄准镜的基础知识:- 周视瞄准镜的定义、分类及发展历程- 周视瞄准镜的结构组成及工作原理- 周视瞄准镜在军事及民用领域的应用2. 周视瞄准镜的操作与使用:- 周视瞄准镜的安装、调节与保养- 观察与测距方法- 瞄准技巧及其在实战中的应用3. 周视瞄准镜实践操作:- 实操练习:使用周视瞄准镜进行观察、测距、瞄准- 问题分析与解决:针对实际操作过程中遇到的问题进行讨论与解决- 案例分析:分析周视瞄准镜在实际应用中的成功案例4. 周视瞄准镜的发展趋势与前景:- 新技术在周视瞄准镜中的应用- 周视瞄准镜在未来战争中的作用- 周视瞄准镜在民用领域的拓展教学内容安排与进度:第一课时:周视瞄准镜基础知识介绍第二课时:周视瞄准镜操作与使用方法第三课时:周视瞄准镜实践操作第四课时:周视瞄准镜发展趋势与前景教学内容与教材章节关联:本教学内容与《军事科技》教材中第四章“光电装备”相关内容紧密关联。
周视瞄准镜的初步设计 北京理工大学 光电学院小学期作业
火炮周视瞄准镜初步设计姓名:***班号:04111202学号:**********专业:测控技术与仪器目录一、综述 (4)二、光学系统的技术要求 (4)三、根据要求拟定光学系统的工作原理 (5)1、光学系统的基本形式 (5)2、光学系统的基本结构 (5)3、系统潜望高的形成 (5)4、俯仰和周视范围的确定 (6)5、共轴系统和棱镜系统的组合 (8)6、孔径光阑位置、物镜位置的选定 (8)四、光学系统的外形尺寸计算 (9)1、目镜的设计 (9)2、物镜的设计 (10)3、分划板的尺寸设计 (11)4、系统中光学零件的外形尺寸设计 (11)(1) 道威棱镜外形尺寸的计算 (11)(2) 物镜通光口径的计算 (14)(3) 顶端直角棱镜尺寸、保护玻璃尺寸的计算 (14)(4) 屋脊棱镜尺寸的计算 (16)(5) 目镜通光口径的计算 (17)5、验证系统参数 (17)(1)验证出瞳距离 (17)(1)验证潜望高 (18)五、设计的光学系统的参数 (18)六、系统设计图示 (19)七、参考书目 (19)附录棱镜转动定理 (20)1、目的 (20)2、棱镜转动定理 (20)3、定理证明 (22)一、 综述周视瞄准镜是一种比较特殊的潜望式瞄准镜,观察者可以通过它来观察周围环境,而不用直视被观察的物体。
射击手可以在不改变自己位置的前提下选择不同方位的瞄准点,从而避免了射击手为观察不同方位而不停转动头部引起的头晕恶心。
周视瞄准镜的目镜位置不动而镜头能够绕垂直轴在水平方向一定的角度范围内进行观察。
按观察范围划分,周视瞄准镜可以分为水平半周视和水平全周视。
其中,观察范围小于360°的为水平半周视,达到360°的为水平全周视。
在火炮上装备周视瞄准镜能使操作员更清晰方便地观察远距离目标,做出确的分析和瞄准,给予目标精确的打击。
二、光学系统的技术要求光学特性:视放大率: 3.7Γ=⨯ 物方视场角: 210ω=︒ 出瞳直径: '4D mm = 出瞳距离: '20z l mm = 潜望高: 185H mm = 要求成正像光学系统要求实现俯仰瞄准范围±18°光学系统要求实现水平瞄准范围360°俯仰和周视中观察位置不变渐晕系数K=0.5.3.7倍视放大率—能获得较好的观察精度4mm的出瞳直径—能在夜间观察时,仍能获得较好的视场潜望高为185mm—能使瞄准者不被对方发现,有较好的隐藏效果出瞳距离至少20mm—能保证该装置在军事领域的使用,保证瞄准手在佩戴防毒面具等装置后仍能使用该装置水平瞄准范围和俯仰瞄准范围分别为360°和±18°—考虑到仪器的制作和使用的需求三、根据要求拟定光学系统的工作原理1、光学系统的基本形式:望远系统;由于系统用于对远距离目标进行观察,具有较大的视角放大率,且可以安装分划板,因此它必然是一个开卜勒望远镜,要使用正光焦度的物镜和目镜。
火炮周视瞄准镜初步设计
应用光学课程设计火炮周视瞄准镜初步设计专业:光电信息科学与工程班级:姓名:完成时间:目录一、火炮周视瞄准镜概述 (4)二、光学系统的技术要求 (4)2.1、光学特性的主要参数 (4)三、拟定光学系统的工作原理 (5)3.1、光学系统的基本形式 (5)3.2、光学系统的基本结构 (5)3.3、共轴系统和棱镜系统的组合 (7)3.4、孔径光阑的确定 (7)四、光学系统外形尺寸的计算 (7)4.1、选择物镜、目镜结构型式,计算其特性参数 (7)⑴、选择目镜结构形式并计算有关特性参数 (7)⑴、选择目镜结构形式并计算有关特性参数 (8)4.2、计算道威棱镜尺寸并验证渐晕系数 (9)4.3、计算顶部棱镜、保护玻璃尺寸 (12)4.4、计算物镜口径 (14)4.5、确定底部直角棱镜和分划板尺寸 (15)4.6、确定目镜口径 (17)4.7、验证出瞳距离与潜望高 (17)五、绘制光学系统原理图 (18)5.1、光学系统参数总结 (18)5.2、光学系统原理图 (20)六、工程伦理与职业道德 (21)七、环境与可持续性 (22)八、技术与社会 (22)九、法律法规 (24)十、个人和团队 (24)十一、创新方法 (24)附录 (24)一、棱镜转动定理 (24)二、理想光学系统光路计算公式 (28)一、火炮周视瞄准镜概述军事上火炮打击中为了搜索目标,需要在行动中进行大范围的观察从而提高火炮的破坏力以及精准度,而由于受到像差等因素的限制,传统的望远系统以及不再合适,我们需要一种光学系统,使其视准轴能够在水平面内横扫以达到全方位观察的目的,而这种光学仪器我们称之为周视瞄准镜。
火炮周视瞄准镜是一种比较特殊的潜望式瞄准镜,它的作用主要有两个:首先,观察员可以使用它来观察周围的环境、寻找需要锁定的目标,在这个过程中,观察员可以观察到自己直视方向以外任意水平方向(包括一定角度范围内的俯仰方向)的物体而不用改变自己的方向,这是由于周视瞄准镜的前端有一个道威棱镜,观察员在以速度比为一比二的速度同时转动道威棱镜以及顶端的棱镜的时候,可以保证目镜位置不变,从而可以使观察员在不改变自己的位置的前提下选择不同位置的瞄准点,这样也就避免了观察员为了观察不同方向的物体而不停转动头部引起的头晕恶心等症状。
火炮周视瞄准镜
火炮周视瞄准镜的初步设计姓名:学号:班级:日期:,一、光学系统的技术要求光学特性视放大率: 物方视场角: 出瞳直径: D ’=4mm出瞳距离: 潜望高H =185毫米要求成正像 光学系统要实现:俯仰瞄准范围±18º水平瞄准范围360º(俯仰和周视中观察位置不变渐晕系数K =Γ=37.X︒=102ωl mmz '≥20二、周视瞄准镜综述1、周视瞄准镜概述军事上为搜索目标,需要大方位观察,由于受像差限制,望远镜的视场不能太大。
所以,只能采用光学手段使望远镜的视准轴在水平面内扫描,以实现全方位观察,这种扫描也称周视。
周视瞄准镜是周视望远镜的一种。
周视瞄准镜的目镜位置不动而镜头能够绕垂直轴在水平方向一定的角度范围内进行观察。
有周视性能的瞄准镜,可以扩大观察范围,同时,俯仰时目镜不动,方便观察者不用改变自己的位置和方向,观察到全方位的景物。
2、周视瞄准镜原理对于周视瞄准镜,常见的一般利用上直角棱镜绕垂直轴作转动时,道威棱镜绕其自身光轴按一定关系互相配合互相转动角,可实现水平周视。
另外,上直角棱镜能绕水平轴俯仰,实现俯仰观察。
但也有少部分采用立方棱镜绕垂直轴转动实现水平周视或者一些光学元件组合实现。
3、周视瞄准镜的分类按观察范围划分,周视瞄准镜可以分为水平半周视和水平全周视。
其中,观察范围小于360°的为水平半周视,达到360°的为水平全周视。
周视望远系统按照目镜是否转到可以分为目镜不动型和目镜随主镜筒一起转动型。
前者观察舒,操作方便。
后者将使操作者感到不便。
4、周视瞄准镜的用途周视瞄准镜是一种性能较完善的瞄准仪器,装备于各种火炮作间接瞄准之用。
火炮周视瞄准镜是配备最多种火炮的一种瞄准镜,广泛用于加农炮、榴弹炮、加榴炮和火箭炮。
它的目镜不动,而镜头能环视一周,它与标定器配合使用实施间接瞄准,不受地形、地物和气候条件的影响。
也能进行直接瞄准和标定。
三、]四、光学系统的工作原理1、光学系统基本形式火炮周视瞄准镜的实际用途是用于望远瞄准,所以光学系统的基本形式是望远系统。
周视瞄准镜初步设计
火炮周视瞄准镜初步设计姓名:班级:04111301学号:**********专业:测控技术与仪器目录一、火炮周视瞄准镜综述二、设计要求三、周视瞄准镜光路的确定及设计3.1由设计要求得出的光学系统特点3.2 火炮周视瞄准镜构造图四、光学系统的外形尺寸计算4.1目镜和物镜尺寸4.2道威棱镜尺寸及渐晕系数的检验4.3顶部直角棱镜和保护玻璃的尺寸4.4物镜目镜口径计算4.5底部直角棱镜尺寸4.6各光学零件主要尺寸总结五、光学系统验证5.1验证出瞳距离5.2 验证潜望高六、参考文献一、火炮周视瞄准镜综述火炮周视瞄准镜是周视望远镜的一种,是一种潜望镜式的设备。
火炮周视瞄准镜的目镜位置不动而镜头能够绕垂直轴在水平方向一定的角度范围内进行观察。
这一个特点使火炮周视瞄准镜大量用于军事装备。
火炮周视瞄准镜是配备最多种火炮的一种瞄准镜,广泛用于加农炮、榴弹炮、加榴炮和火箭炮。
按观察范围划分,周视瞄准镜可以分为水平半周视和水平全周视。
其中,观察范围小于360°的为水平半周视,达到360°的为水平全周视。
有周视性能的瞄准镜,可以扩大观察范围,同时,俯仰时目镜不动,方便观察者不用改变自己的位置和方向,观察到四周的景物。
在火炮上装备周视瞄准镜能使操作员更清晰方便地观察远距离目标,并对此作出准确的分析和瞄准,必要时给予目标精确的打击。
由于周视瞄准镜采用开普勒式的望远镜,在物镜和目镜之间形成实像,因此可以通过安装分划板,将像与分划板上的刻线进行比较,更加方便地瞄准和测量,给军用带来极大的方便。
另外在军用周视瞄准镜中,出瞳距离比较大,便于观察者佩戴防毒面具。
为防止射击时撞击头部,有的瞄准镜出瞳距离达到七八十毫米,还要备用软硬适度的眼罩和护额以保证射击手的人身安全。
二、设计要求光学特性:视放大率: 3.7Γ=⨯物方视场角:210ω=︒出瞳直径: '4D mm =出瞳距离:'20z l mm =潜望高: 185H mm =要求成正像要求实现俯仰瞄准范围±18°要求实现水平瞄准范围360°俯仰和周视中观察位置不变渐晕系数K=0.5.三、周视瞄准镜光路的确定及设计3.1由设计要求得出的光学系统特点(1)由于火炮周视望远镜用于对远距离目标进行观察,因此它必然是一个望远系统,又因为要对目标距离进行精确测量,所以系统内应加装分划板,这就要求该系统所成的像必须是实像,能够在分划板上显示,所以该光学系统应是开普勒系统。
周视瞄准镜设计说明书

周视瞄准镜设计说明书080116-05-尚磊周视瞄准镜设计说明书一、周视瞄准镜概述周视瞄准镜是周视望远镜的一种。
周视瞄准镜的目镜位置不动而镜头能够绕垂直轴在水平方向一定角度范围内进行观察。
对于周视瞄准镜,常见的一般利用上直角棱镜绕垂直轴做转动时,道威棱镜绕其自身光轴按一定关系互相配合互相转动角,可实现水平周视。
另外,上直角棱镜能绕水平轴俯仰,实现俯仰观察。
但也有少部分采用立方棱镜绕垂直轴转动实现水平周视或者一些光学元件组合实现。
按观察范围划分,周视瞄准镜可以分为水平半周视和水平全周视。
其中,观察范围小于360°的为水平半周视,达到360°的为水平全周视。
有周视性能的瞄准镜,可以扩大观察范围,同时,俯仰时目镜不动,方便观察者不用改变自己的位置和方向,观察到四周的景物。
这个镜子最有意思的是眼睛位置不动,转动转螺可观察360°,因为它有特殊的光学结构。
二、光路设计由于系统用于对远距离目标进行观察,具有的视觉放大率,因此它必然是一个开普勒望远镜,要使用正光焦度的物镜和目镜。
为了便于观察,系统应成正像,所以必须加入倒像系统。
由于系统要求有一定的潜望高度,所以可以采用使光轴改变90°的棱镜或平面镜,但平面镜的安装、固定十分困难,而且所镀的反光膜易变质、脱落,还会在反射时造成百分之十左右的光能损失,所以用平面镜进行反射并不理想。
而棱镜则可以克服这些缺点,所以采用使光轴改变90°的棱镜形成前往高。
考虑到系统的简单易携性,两个棱镜都选用直角棱镜。
为了在水平面和垂直面改变光轴的方向,可以在光轴上端01点的直角棱镜绕水平和垂直轴转动。
当棱镜绕经过01点的垂直于主截面的水平轴转动时,像的方向不会发生旋转。
但当棱镜绕0102轴转动时,如果物平面相对主截面不动,像平面也将随之转动。
如果要求像平面不转,就必须使像面产生一个相反方向的转动。
这样就必须加入一个棱镜,利用它的转动来补偿像平面的转动,而不使光轴的方向改变。
周视瞄准镜的初步设计-北京理工大学-光电学院小学期作业

火炮周视瞄准镜初步设计姓名:***班号:学号:**********专业:测控技术与仪器目录一、综述 (4)二、光学系统的技术要求 (4)三、根据要求拟定光学系统的工作原理 (5)1、光学系统的基本形式 (5)2、光学系统的基本结构 (5)3、系统潜望高的形成 (5)4、俯仰和周视范围的确定 (6)5、共轴系统和棱镜系统的组合 (8)6、孔径光阑位置、物镜位置的选定 (8)四、光学系统的外形尺寸计算 (9)1、目镜的设计 (9)2、物镜的设计 (10)3、分划板的尺寸设计 (11)4、系统中光学零件的外形尺寸设计 (11)(1) 道威棱镜外形尺寸的计算 (11)(2) 物镜通光口径的计算 (14)(3) 顶端直角棱镜尺寸、保护玻璃尺寸的计算 (14)(4) 屋脊棱镜尺寸的计算 (16)(5) 目镜通光口径的计算 (17)5、验证系统参数 (17)(1)验证出瞳距离 (17)(1)验证潜望高 (18)五、设计的光学系统的参数 (18)六、系统设计图示 (19)七、参考书目 (19)附录棱镜转动定理 (20)1、目的 (20)2、棱镜转动定理 (20)3、定理证明 (22)一、 综述周视瞄准镜是一种比较特殊的潜望式瞄准镜,观察者可以通过它来观察周围环境,而不用直视被观察的物体。
射击手可以在不改变自己位置的前提下选择不同方位的瞄准点,从而避免了射击手为观察不同方位而不停转动头部引起的头晕恶心。
周视瞄准镜的目镜位置不动而镜头能够绕垂直轴在水平方向一定的角度范围内进行观察。
按观察范围划分,周视瞄准镜可以分为水平半周视和水平全周视。
其中,观察范围小于360°的为水平半周视,达到360°的为水平全周视。
在火炮上装备周视瞄准镜能使操作员更清晰方便地观察远距离目标,做出确的分析和瞄准,给予目标精确的打击。
二、光学系统的技术要求光学特性:视放大率: 3.7Γ=⨯ 物方视场角: 210ω=︒ 出瞳直径: '4D mm = 出瞳距离: '20z l mm = 潜望高: 185H mm = 要求成正像光学系统要求实现俯仰瞄准范围±18°光学系统要求实现水平瞄准范围360°俯仰和周视中观察位置不变渐晕系数0.5.3.7倍视放大率—能获得较好的观察精度4的出瞳直径—能在夜间观察时,仍能获得较好的视场潜望高为185—能使瞄准者不被对方发现,有较好的隐藏效果出瞳距离至少20—能保证该装置在军事领域的使用,保证瞄准手在佩戴防毒面具等装置后仍能使用该装置水平瞄准范围和俯仰瞄准范围分别为360°和±18°—考虑到仪器的制作和使用的需求三、根据要求拟定光学系统的工作原理1、光学系统的基本形式:望远系统;由于系统用于对远距离目标进行观察,具有较大的视角放大率,且可以安装分划板,因此它必然是一个开卜勒望远镜,要使用正光焦度的物镜和目镜。
周视瞄准镜课程设计说明书
一、课程设计的目的....................................................................................... 错误!未定义书签。
二、设计题目................................................................................................... 错误!未定义书签。
三、周视瞄准镜参数:................................................................................... 错误!未定义书签。
道威棱镜:............................................................................................... 错误!未定义书签。
直角棱镜:............................................................................................... 错误!未定义书签。
直角屋脊棱镜:....................................................................................... 错误!未定义书签。
四、设计任务:............................................................................................... 错误!未定义书签。
五、说明书内容............................................................................................... 错误!未定义书签。
周氏瞄准镜
周视瞄准镜结构设计姓名:学号:指导老师:学院:光电工程学院专业:测控技术与仪器2016年7月11日一、课程设计的目的1.掌握仪器结构设计特点及仪器零件参数的选择;培养结构设计的能力。
2.巩固加深仪器零件课程的基本内容。
3.学会查阅资料和查阅手册。
4.学会撰写技术文件的方法。
二、设计题目周视瞄准镜结构设计。
三、工作原理1.周视瞄准镜结构图及其结构原理:周瞄准镜的主要结构包括有镜身部分、俯仰机构、方向机构及齿轮差动机构等。
见图1所示。
图1 周视瞄准镜结构图1-下部 2-上部 3-镜头本体 4-旋转蜗轮筒 5-旋转蜗杆 6-上圆锥齿轮 7-下圆锥齿轮8-行星轮 9-旋转手轮 10-棱镜筒 11-目镜外筒 12-目镜筒 13-棱镜托架 14-道威棱镜筒 15-直角棱镜 16-俯仰蜗杆 17-俯仰蜗轮 18-俯仰手轮 19-道威棱镜 20-刻度筒镜身部分分为镜头、上镜体及下镜体。
它承载全部光学零件。
镜头装有保护玻璃和直角棱镜,上镜体无光学零件。
下镜头则承载有梯形棱镜、物镜、屋脊棱镜和目镜部分。
(1)周视瞄准镜中的俯仰机构,见图2所示。
图2 俯仰机构图2所示俯仰机构位于镜头部分。
采用蜗杆蜗轮传动,用来实现对目标的高低瞄准和测量高低角。
它由齿弧2、蜗杆1、直角棱镜筒3组成。
偏心套筒12用来消除啮合间隙。
蜗轮与直角棱镜筒连接固定在一起,蜗杆由下向上插入偏心套筒内,上端通过销钉等零件与高低分划手轮相联接。
转动高低分划手轮13时,蜗杆1带动齿弧2和直角棱镜筒3,使直角棱镜绕水平轴线转动,进行高低瞄准,并由高低分划圈上读出高低角。
(2)周视瞄准镜中的解脱机构。
解脱机构位于上镜体部分,采用蜗杆蜗轮传动,利用偏心机构进行方向解脱。
见图3所示,与实物略有不同。
图3 解脱机构解脱机构原理:在未解脱状态,蜗秆靠偏心套筒和扭簧的作用与蜗轮紧密啮合。
转动磁辅助分划手轮时,由子蜗轮固定不动,蜗杆一方面绕自身轴线转动.同时又带动方向盘本体部分,以垂直轴为中心,绕蜗轮回转,进行方向瞄准,并可读出磁方位角和方位角的分划值。
周视瞄准镜参数设计123

周视瞄准镜参数设计作者姓名:乔宇专业名称:光电信息科学与工程指导教师:陈全学号:1303280216一 光学系统的技术要求1.光学特性:视放大率 Γ=3.5×物方视场角 2w=10°出瞳直径 D'=3mm出瞳距离 l z'≥20mm2.潜望高 H=192mm3.光学系统要求实现俯仰瞄准范围±18°光学系统要求实现水平瞄准范围360°4.渐晕系数K=0.5.二 设计原理1.由于系统用于对远距离目标进行观察,具有的视角放大率,因此它必然是一个开卜勒望远镜,要使用正光焦度的物镜和目镜。
为了便于观察,系统应成正像,所以必须加入倒像系统。
由于系统要求有一定的潜望高度,所以可以采用两个使光轴改变90°的棱镜或平面镜,但平面镜的安装,固定十分困难,而且所镀的反光膜易变质,脱落,还会在反射时造成百分之十左右的光能损失,所以用平面镜进行反射并不理想,而棱镜则可以克服这些缺点,所以采用两个使光轴改变90°的棱镜形成潜望高。
考虑到系统的简单易携性,两个棱镜都选用直角棱镜。
O 2O 1为了在水平面和垂直面改变光轴的方向,可以在光轴上端O1点的直角棱镜绕水平和垂直轴转动。
当棱镜绕经过O1点的垂直于主截面的水平轴转动时,像的方向不会发生旋转。
但当棱镜绕O1O2轴转动时,如果物平面相对主截面不动,像平面也将随之转动。
如果要求像平面不转,就必须使像面产生一个相反方向的转动。
这样就必须加入一个棱镜,利用它的转动来补偿像平面的转动,而不使光轴的方向改变。
根据棱镜转动定理,加入的棱镜反射次数应该为奇数,再考虑系统的轻便性,选择了道威棱镜。
同样根据棱镜转动定理,道威动角度的一半,且两者的转动方向相反。
目前的倒像系统中的顶端直角棱镜和道威棱镜的反射次数之和为偶数。
加上底端棱镜,系统成镜像,故可考虑选择其中一个棱镜为屋脊棱镜,这里选底端直角棱镜为屋脊棱镜。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
周视瞄准镜设计说明书080116-05-尚磊周视瞄准镜设计说明书一、周视瞄准镜概述周视瞄准镜是周视望远镜的一种。
周视瞄准镜的目镜位置不动而镜头能够绕垂直轴在水平方向一定角度围进行观察。
对于周视瞄准镜,常见的一般利用上直角棱镜绕垂直轴做转动时,道威棱镜绕其自身光轴按一定关系互相配合互相转动角,可实现水平周视。
另外,上直角棱镜能绕水平轴俯仰,实现俯仰观察。
但也有少部分采用立方棱镜绕垂直轴转动实现水平周视或者一些光学元件组合实现。
按观察围划分,周视瞄准镜可以分为水平半周视和水平全周视。
其中,观察围小于360°的为水平半周视,达到360°的为水平全周视。
有周视性能的瞄准镜,可以扩大观察围,同时,俯仰时目镜不动,方便观察者不用改变自己的位置和方向,观察到四周的景物。
这个镜子最有意思的是眼睛位置不动,转动转螺可观察360°,因为它有特殊的光学结构。
二、光路设计由于系统用于对远距离目标进行观察,具有的视觉放大率,因此它必然是一个开普勒望远镜,要使用正光焦度的物镜和目镜。
为了便于观察,系统应成正像,所以必须加入倒像系统。
由于系统要求有一定的潜望高度,所以可以采用使光轴改变90°的棱镜或平面镜,但平面镜的安装、固定十分困难,而且所镀的反光膜易变质、脱落,还会在反射时造成百分之十左右的光能损失,所以用平面镜进行反射并不理想。
而棱镜则可以克服这些缺点,所以采用使光轴改变90°的棱镜形成前往高。
考虑到系统的简单易携性,两个棱镜都选用直角棱镜。
为了在水平面和垂直面改变光轴的方向,可以在光轴上端01点的直角棱镜绕水平和垂直轴转动。
当棱镜绕经过01点的垂直于主截面的水平轴转动时,像的方向不会发生旋转。
但当棱镜绕0102轴转动时,如果物平面相对主截面不动,像平面也将随之转动。
如果要求像平面不转,就必须使像面产生一个相反方向的转动。
这样就必须加入一个棱镜,利用它的转动来补偿像平面的转动,而不使光轴的方向改变。
根据棱镜转动定理,加入的棱镜反射次数应该为奇数,在考虑系统的轻便性,选择了道威棱镜。
同样根据棱镜转动定理,道威棱镜的转动角度为01处的直角棱镜转动角度的一半,且两者的转动方向相反。
目前导向系统的顶端直角棱镜和道威棱镜的反射次数之和为偶数,加之低端棱镜,系统成镜像,故可考虑选择其中一个棱镜为屋脊棱镜,这里选底端直角棱镜为屋脊棱镜。
考虑到物镜和目镜之间的距离可能不是很大,所以把物镜放在道威棱镜和底端屋脊棱镜之间。
综合,得到周视瞄准镜的光学原理图如下:三、结构设计周瞄准镜的主要结构包括有镜身部分、俯仰机构、方向机构及齿轮差动机构等。
镜身部分分为镜头、上镜体及下镜体。
它承载全部光学零件。
镜头装有保护玻璃和直角棱镜,上镜体无光学零件。
下镜头则承载有梯形棱镜、物镜、屋脊棱镜和目镜部分。
(一)周视瞄准镜中的俯仰机构,位于镜头部分,采用蜗杆蜗轮传动,用来实现对目标的高低瞄准和测量高低角。
它由齿弧、蜗杆、直角棱镜筒组成。
偏心套筒用来消除啮合间隙。
蜗轮与直角棱镜筒连接固定在一起,蜗杆由下向上插入偏心套筒,上端通过销钉等零件与高低分划手轮相联接。
转动高低分划手轮时,蜗杆1带动齿弧和直角棱镜筒,使直角棱镜绕水平轴线转动,进行高低瞄准,并由高低分划圈上读出高低角。
(二)周视瞄准镜中的解脱机构。
解脱机构位于上镜体部分,采用蜗杆蜗轮传动,利用偏心机构进行方向解脱。
解脱机构原理:在未解脱状态,蜗秆靠偏心套筒和扭簧的作用与蜗轮紧密啮合。
转动磁辅助分划手轮时,由子蜗轮固定不动,蜗杆一方面绕自身轴线转动.同时又带动方向盘本体部分,以垂直轴为中心,绕蜗轮回转,进行方向瞄准,并可读出磁方位角和方位角的分划值。
压下解脱手柄时,偏心套筒旋转,扭簧也产生扭转,使蜗杆与蜗轮脱离,此时仪器可作大角度回转。
放开解脱手柄,偏心套筒靠扭簧的恢复力矩,重使蜗杆与蜗轮啮合。
(三)差动机构是实现周视原理的要求。
周视原理要直角棱镜和道威棱镜绕同一光轴同时同向转动,并且道威棱镜与直角棱镜的角速度之比为1/2。
齿轮传动具有瞬时角速度固定不变的特殊性,另外上面的速比要求在差动轮系中实现。
差动轮系由上圆锥齿轮6、下圆锥齿轮7和行星轮8组合而成一个复杂轮系。
从机械原理可知,采用转化机构可以证明,当下圆锥齿轮7固定不动时,上圆锥齿轮6之角速度与道威棱镜19之角速度之比为2:1,上圆锥齿轮6与直角棱镜15连成一体,实现上述要求。
3600)0.06 ,圆周100格;读数刻度筒格值100密旋转手轮格值1密位(60001位(60),旋转蜗杆转动一周,蜗轮转动100密位(60),即传动比i=60图4 差动轮系原理图图中,齿轮6、7为太阳轮,齿轮8为行星轮,道威棱镜相当于差动轮系中的系杆。
设齿轮6、7的角速度分别为ω1、ω2,系杆的角速度为ωH。
差动轮系是一个复杂轮系,须采用转化机构来研究。
在转化机构中,齿轮6、7的角速度为ω1H=ω1-ωH,ω2H=ω2-ωH.系杆的角速度ωHH=0(即道威棱镜)。
可求得转化机构的传动比i H/6、7为i H/6、7=ω1/ω2H=ω1-ωH/ω2-ωH=-Z7/Z6式中:Z6、Z7分别为齿轮6和7的齿数,负号表示齿轮7的实际角速度与图2-25示ω2的方向相反。
在差动轮系中,通常取Z 6=Z 7,则 ω1-ωH /ω2-ωH =-1 ω1-ωH =-(ω2-ωH )ωH =1/2(ω1+ω2)周视瞄准镜中,齿轮7与下镜体相连不能转动,故ω2=0,所以ωH =ω1/2。
直角棱镜与齿轮6连接在一起,道威棱镜的角速度为ωH ,因此利用这种差动轮系可实现上述周视原理。
四、 技术要求及主要参数 (一) 技术要求(1) 在水平方向周视360°,目镜不动。
(2)测角围:方向角360°,测角精度010-±,高低角18±°,测角精度±0-02。
(3)观察距离3km 左右。
(4)观察围:物方视场ω2尽量大些。
(5)潜望高度:H 不小于180mm (6)出瞳距离:不小于20mm(7)尺寸限制:瞄准镜之镜筒外径均匀,最粗处不超过30mm (中部方向机构除外)。
(8)像质清晰,像倾斜不超过1° (二)主要参数1、俯仰机构参数:蜗杆 m=0.5mm ;Z 1=1;q=12.5;蜗轮Z 2=120 ;ha *=1;c *=0.25(1) 蜗杆的具体参数: 蜗杆轴向齿距—— 蜗杆轴向压力角—— 蜗杆分度圆直径—— 蜗杆导程角—— 蜗杆齿顶圆直径—— 蜗杆齿根圆直径—— 蜗杆齿宽—— (2)蜗轮具体参数:蜗轮端面齿距—— 蜗轮模数——蜗轮端面压力角—— 蜗轮分度圆直径—— 蜗轮喉圆直径—— 蜗轮齿根圆直径——蜗轮节圆直径—— 蜗轮齿宽—— 蜗轮齿宽角——蜗轮咽喉母圆半径——中心距——2、旋转机构参数:蜗杆 m=1.06mm ; Z 1=1 626'= γ; q=8; 蜗轮Z 2=60 ;20=α ha *=1;c *=0.25(1) 蜗杆的具体参数: 蜗杆轴向齿距—— 蜗杆轴向压力角—— 蜗杆分度圆直径—— 蜗杆导程角—— 蜗杆齿顶圆直径—— 蜗杆齿根圆直径—— 蜗杆齿宽—— (2)蜗轮具体参数:蜗轮端面齿距—— 蜗轮模数——蜗轮端面压力角—— 蜗轮分度圆直径—— 蜗轮喉圆直径—— 蜗轮齿根圆直径—— 蜗轮节圆直径—— 蜗轮齿宽—— 蜗轮齿宽角——蜗轮咽喉母圆半径——中心距——3、差动轮系圆锥齿轮参数:Z 1= Z 3; Z 2=22;m=0.7mm ; Z 1=60 ; δ1=20 ;δ2=70 20=α ha *=1;c *=0.2 传动比—— 分度圆锥角—— 当量齿数—— 分度圆直径—— 外锥距——齿宽系数——齿顶高系数——顶隙系数——齿顶高——齿根高——齿顶圆直径——齿根圆直径——齿顶角——齿根角——顶锥角——根锥角——五、选材原则适合于制造精密传动的各种齿轮,要求抗腐蚀和更高的耐磨损性,可用合金结构钢。
合金结构钢的优点有:①比优质碳素结构钢有更高的耐磨性能;②抗腐蚀性能高;3、热处理性能好;4、强度、硬度等性能好,是首选材料。
有色金属中某些合金,如黄铜和青铜,也得到了广泛的应用。
黄铜与青铜的加工性能,防磁性能及机械性能也适合制作高精度的精密齿轮,但是重量大,成本较高,故应合理使用。
蜗杆大多数采用碳素钢或合金钢。
蜗轮常采用材料是锡青铜ZCuSn10Pb1.5。
消除传动空回采用外加弹性垫圈。
六、装配要求1.装配图:a.结构合理,装配方便,满足使用及工艺要求。
b.视图选择正确,投影关系清楚,符合制图标准。
c.装配图上要标注主要尺寸:轮廓尺寸,主要配合尺寸及配合种类。
d.装配技术要求必要合理。
e.引出件号,列出明细表及标题栏。
2.零件图:a.结构合理,工艺性好。
b.视图完整,比例合适,符合制图要求。
c.标出尺寸公差,形位公差,粗糙度,材料,热处理及其表面处理要求。
七、结论及改进意见(一)结论八、设计参考资料1)《瞄准仪器原理与设计>》,王中民编著,理工大学2)《齿轮传动设计手册》,朱孝录主编,化学工业3)《机械设计手册》第四册,机械工业4)《机械设计图册》成大先主编,化学工业5)《现代仪器仪表技术与设计》王大珩主编,科学6)《工程光学》郁道银主编,机械工业。