51单片机一个按键控制2个灯产生四种状态
51单片机二极管发光程序

51单片机二极管发光程序
51单片机(STC89C52)可以通过控制IO口来驱动二极管发光。
下面我将为你提供一个简单的例子,演示如何在51单片机上使用C
语言编写程序来控制二极管发光。
首先,我们需要连接一个二极管到单片机的IO口上。
假设我们
将二极管连接到P1口的第0个引脚上。
然后,我们可以使用C语言编写如下的程序来让这个二极管发光:
c.
#include <reg52.h> // 包含51单片机的寄存器定义文件。
void main() {。
P1 = 0xFE; // 将P1口的第0个引脚拉低,使二极管发光。
while(1) {。
// 这里可以添加你需要的其他操作。
}。
}。
在这个简单的例子中,我们使用了reg52.h头文件来包含51单
片机的寄存器定义。
然后在main函数中,我们将P1口的第0个引
脚拉低,使二极管发光。
接着使用一个无限循环来让程序持续执行。
需要注意的是,具体的连接方式和引脚的控制可能会根据具体
的硬件电路设计而有所不同。
在实际的项目中,你可能需要根据具
体的硬件连接情况和需求来编写相应的程序。
另外,如果你需要实现更复杂的功能,比如控制二极管的闪烁、呼吸灯效果等,你可能需要使用定时器中断、PWM控制等技术来实现。
这需要更深入的学习和了解51单片机的相关知识。
希望这个简
单的例子能够帮助你入门。
51单片机定时器的使用和详细讲解__特别是定时器2

2021/10/10
1
章节概述 很棒
8.1 概述 8.2 定时器T0和T1的结构 8.3 定时器工作模式 8.4 定时器T2
2021/10/10
2
8.1 概述
定时器是单片机的重要功能模块之一,在检测、 控制领域有广泛应用。
定时器常用作定时时钟,以实现定时检测、定 时响应、定时控制,并且可用于产生ms宽的 脉冲信号,驱动步进电机
在工作模式T 2中,(2定5 时-X 器6) 的T定c时y时间由下式确定:
只有T0可工 作于此模式
2021/10/10
21
模式2的结构图如图8-6所示。
8位加法 计数器
2021/10/10
图8-6 方式2结构图
初值寄 存器
22
4.工作模式3 当T0M(T1M)=11时定时器设定为工作模式3,只有定
Tcy
2021/10/10
8
2.模式寄存器(TMOD)
TMOD用来选择定时器0、1的工作模式,低4位 用于定时器0,高4位用于定时器1,其组成如图 8-2所示。
T1
T0
00:模式0
方式 01:模式1 方式
选择
10:模式2 11:模式3
选择
2021/10/10
图8-2 模式寄存器组成
9
3.控制寄存器(TCON)
18
2.工作模式1 T0M(T1M)=01时定时器设定为工作模式1,此时
定时器0(定时器1)被设置为16位定时器。此时 TH0、TL0都是8位加法计数器。其他与工作方式0 相同。 定时器的定时时间
T(65-5X)3T 6cy
计数初始值
计数 2n 初 -定值 时时 (此 间 n 处 1)6 Tcy
单片机2线4灯原理
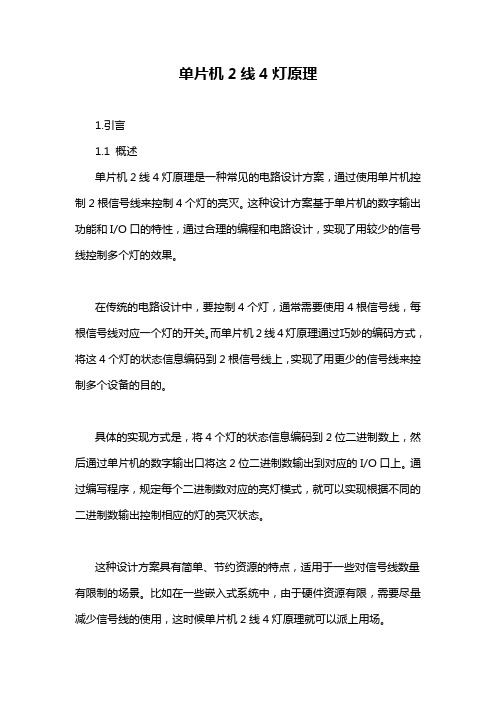
单片机2线4灯原理1.引言1.1 概述单片机2线4灯原理是一种常见的电路设计方案,通过使用单片机控制2根信号线来控制4个灯的亮灭。
这种设计方案基于单片机的数字输出功能和I/O口的特性,通过合理的编程和电路设计,实现了用较少的信号线控制多个灯的效果。
在传统的电路设计中,要控制4个灯,通常需要使用4根信号线,每根信号线对应一个灯的开关。
而单片机2线4灯原理通过巧妙的编码方式,将这4个灯的状态信息编码到2根信号线上,实现了用更少的信号线来控制多个设备的目的。
具体的实现方式是,将4个灯的状态信息编码到2位二进制数上,然后通过单片机的数字输出口将这2位二进制数输出到对应的I/O口上。
通过编写程序,规定每个二进制数对应的亮灯模式,就可以实现根据不同的二进制数输出控制相应的灯的亮灭状态。
这种设计方案具有简单、节约资源的特点,适用于一些对信号线数量有限制的场景。
比如在一些嵌入式系统中,由于硬件资源有限,需要尽量减少信号线的使用,这时候单片机2线4灯原理就可以派上用场。
总之,单片机2线4灯原理是一种常见的电路设计方案,通过巧妙的编码方式和单片机的控制能力,实现了用较少的信号线控制多个灯的效果,具有简单、节约资源的特点,适用于一些对信号线数量有限制的场景。
1.2 文章结构:本文总共分为三个部分,分别是引言、正文和结论。
引言部分主要介绍了本文的背景和意义,概述了单片机2线4灯原理的主要内容,并提出了本文的目的。
正文部分主要分为两个小节,分别是单片机介绍和2线4灯原理。
在单片机介绍部分,将详细介绍单片机的定义、特点和应用领域。
在2线4灯原理部分,将深入解析2线4灯电路的工作原理和设计要点,包括引脚连接、电流分配和灯光控制等方面的内容。
结论部分将对本文进行总结并展望未来的发展方向。
在总结部分,将回顾本文涉及的主要观点和实验结果,强调2线4灯原理的重要性和应用前景。
在展望部分,将探讨可能的改进措施和研究方向,以促进该原理在实际应用中的发展和应用范围的扩大。
单片机课后习题答案

第一章计算机基础知识1-1微型计算机主要由哪几部分组成?各部分有何功能?答:一台微型计算机由中央处理单元(CPU)、存储器、I/O接口及I/O设备等组成,相互之间通过三组总线(Bus):即地址总线AB、数据总线DB和控制总线CB来连接。
CPU由运算器和控制器组成,运算器能够完成各种算术运算和逻辑运算操作,控制器用于控制计算机进行各种操作。
存储器是计算机系统中的“记忆”装置,其功能是存放程序和数据。
按其功能可分为RAM和ROM。
输入/输出(I/O)接口是CPU与外部设备进行信息交换的部件。
总线是将CPU、存储器和I/O接口等相对独立的功能部件连接起来,并传送信息的公共通道。
1-3什么叫单片机?其主要由哪几部分组成?答:单片机是指把CPU、RAM、ROM、定时器/计数器以及I/O接口电路等主要部件集成在一块半导体芯片上的微型计算机。
1-4在各种系列的单片机中,片内ROM的配置有几种形式?用户应根据什么原则来选用?答:单片机片内ROM的配置状态可分四种:(1)片内掩膜(Mask)ROM型单片机(如8051),适合于定型大批量应用产品的生产;(2)片内EPROM型单片机(如8751),适合于研制产品样机;(3)片内无ROM型单片机(如8031),需外接EPROM,单片机扩展灵活,适用于研制新产品;(4)EEPROM(或FlashROM)型单片机(如89C51),内部程序存储器电可擦除,使用更方便。
1-5写出下列各数的另两种数制的表达形式(二、十、十六进制)1100010100111001000111100100100111111101101100111011011101011119862H200394E47H585249H162363F6CH291D14955D71-6写出下列各数的BCD参与:59:01011001,1996:0001100110010110,4859.2:0100100001011001.0010389.41:001110001001.01000001第二章MCS-51单片机的硬件结构2-1 8052单片机片内包含哪些主要逻辑功能部件?答:8052单片机片内包括:①8位中央处理器CPU一个②片内振荡器及时钟电路③256B数据存储器RAM。
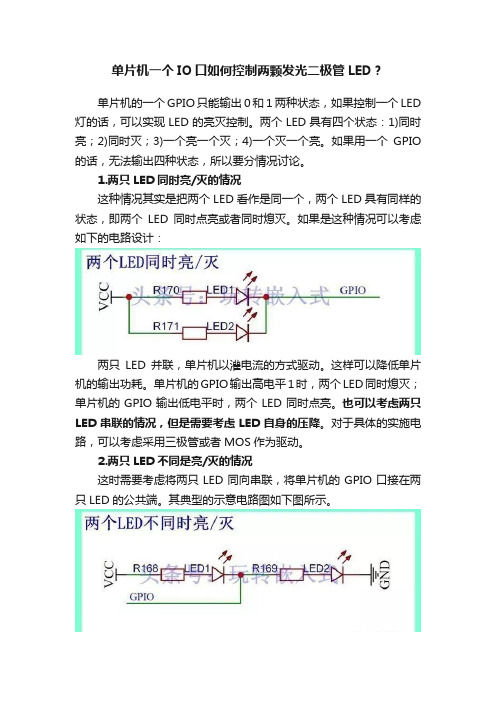
单片机一个IO口如何控制两颗发光二极管LED?
单片机一个IO口如何控制两颗发光二极管LED?
单片机的一个GPIO只能输出0和1两种状态,如果控制一个LED 灯的话,可以实现LED的亮灭控制。
两个LED具有四个状态:1)同时亮;2)同时灭;3)一个亮一个灭;4)一个灭一个亮。
如果用一个GPIO 的话,无法输出四种状态,所以要分情况讨论。
1.两只LED同时亮/灭的情况
这种情况其实是把两个LED看作是同一个,两个LED具有同样的状态,即两个LED同时点亮或者同时熄灭。
如果是这种情况可以考虑如下的电路设计:
两只LED并联,单片机以灌电流的方式驱动。
这样可以降低单片机的输出功耗。
单片机的GPIO输出高电平1时,两个LED同时熄灭;单片机的GPIO输出低电平时,两个LED同时点亮。
也可以考虑两只LED串联的情况,但是需要考虑LED自身的压降。
对于具体的实施电路,可以考虑采用三极管或者MOS作为驱动。
2.两只LED不同是亮/灭的情况
这时需要考虑将两只LED同向串联,将单片机的GPIO口接在两只LED的公共端。
其典型的示意电路图如下图所示。
两只LED同向串联后串在电源电路中,单片机的GPIO控制两个LED的公共端。
当单片机输出高电平1时LED1熄灭,而LED2被点亮(拉电流的方式);当单片机输出低电平0时LED1被点亮(灌电流的方式),而LED2熄灭。
这种情况时需要考虑电阻的选型,也可以使用三极管或者MOS管作为驱动。
51单片机填空题
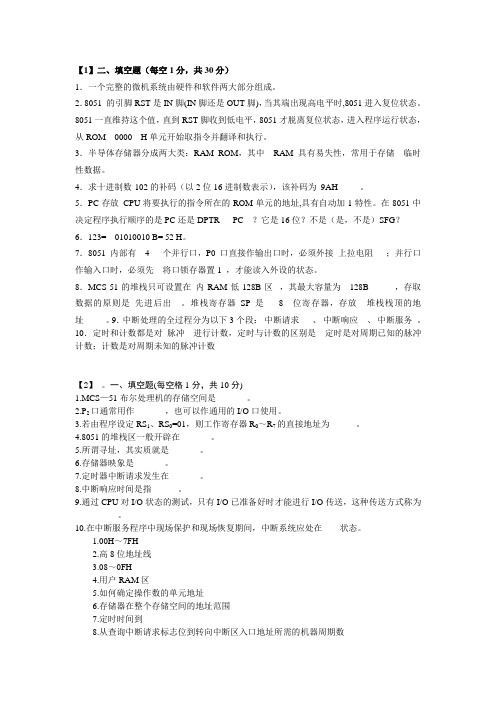
【1】二、填空题(每空1分,共30分)1.一个完整的微机系统由硬件和软件两大部分组成。
2.8051 的引脚RST是IN脚(IN脚还是OUT脚),当其端出现高电平时,8051进入复位状态。
8051一直维持这个值,直到RST脚收到低电平,8051才脱离复位状态,进入程序运行状态,从ROM 0000 H单元开始取指令并翻译和执行。
3.半导体存储器分成两大类:RAM ROM,其中RAM 具有易失性,常用于存储临时性数据。
4.求十进制数-102的补码(以2位16进制数表示),该补码为9AH 。
5.PC存放_CPU将要执行的指令所在的ROM单元的地址,具有自动加1特性。
在8051中决定程序执行顺序的是PC还是DPTR PC ?它是16位?不是(是,不是)SFG?6.123= 01010010 B= 52 H。
7.8051内部有 4 个并行口,P0口直接作输出口时,必须外接上拉电阻;并行口作输入口时,必须先将口锁存器置1 ,才能读入外设的状态。
8.MCS-51的堆栈只可设置在内RAM低128B区,其最大容量为128B ,存取数据的原则是先进后出。
堆栈寄存器SP是8 位寄存器,存放堆栈栈顶的地址。
9.中断处理的全过程分为以下3个段:中断请求、中断响应、中断服务。
10.定时和计数都是对脉冲进行计数,定时与计数的区别是定时是对周期已知的脉冲计数;计数是对周期未知的脉冲计数【2】。
一、填空题(每空格1分,共10分)1.MCS—51布尔处理机的存储空间是_______。
2.P2口通常用作_______,也可以作通用的I/O口使用。
3.若由程序设定RS1、RS0=01,则工作寄存器R0~R7的直接地址为______。
4.8051的堆栈区一般开辟在_______。
5.所谓寻址,其实质就是_______。
6.存储器映象是_______。
7.定时器中断请求发生在_______。
8.中断响应时间是指______。
9.通过CPU对I/O状态的测试,只有I/O已准备好时才能进行I/O传送,这种传送方式称为_______。
第六章 MCS-51单片机内部定时器
6.3.1 模式0及应用
在这种模式下,16位寄存器只用了13位。 其中,TL0的高3位未用,TH0占8位。当 TL0的低5位溢出时,向TH0进位。当TH0 溢出时,向中断标志位TF0进位,并申请中 断。 因此,可通过查询TF0 是否置位或考 察中断是否发生来判断定时器/计数器0的 操作完成与否。
(2)计算1ms定时T0的初值:
机器周期为(1/fOSC)×12=[1/(12×106)]×12=1μs, 设T0的 计数初值为X,则 (213-X)×1×10-6=1×10-3ms
X=213-1×10-3/(1×10) -6 =8192-1000=7192D=1110000011000
高8位: E0H 低5位: 18H
fosc=12MHz, 采用查询方式。
解:方波周期 T=1/100Hz=0.01s=10ms 用T1定时5ms 计数初值 X为: X=216-12×5×103/12=60536=EC78H 程序如下:
MOV TMOD, #10H ;T1模式1,定时方式
SETB TR1 LOOP:MOV TH1,#0ECH
例:晶振为12MHZ ,则计数周期为
T=12/(12*106)Hz =1微秒
最短的定时 周期
计数器工作方式:
当定时器/计数器为计数工作方式时,通过
引脚T0和T1对外部信号计数,外部脉冲的下降
沿触发计数
在每个机器周期的
采样过程:
S5P2期间采样引脚
当输入脉冲信号从1到0的负跳变时,计数器就 自动加1。 由于检测一个由1到0的跳变需要两 个机器周期,所以 计数的最高频率为振荡频 率的1/24。为了确保给定电平在变化前至少被 采样一次,外部计数脉冲的高低电平均需保持 一个机器周期以上。(占空比没有限制)
51单片机按键控制花样灯.

51单片机按键控制花样灯时间:2012-09-10 13:50:11 来源:51hei 作者:/***************************************************** 本程序实现用按键控制花样灯。
** 当K1按下时,灯从0xfe向左跑一遍;** 当K2按下时,LED灯从0x7f向右跑一遍到了0xfe右跑回到起始位置;** 当K3键按下时,LED灯从0xfe开始作流水灯形式运行一次,然后再流回来。
* * 当K4键按下时,LED灯先亮前四个,接着再转向亮后四个。
** 当K5键按下时,结束任意正在进行的程序,使LED灯全部熄灭。
*******************************************************/*************************************************连接方法:P0接独立按键JP5;P2接LED灯接口JP1 ************************************************************/#include <reg52.h> //头文件,函数声明#include <intrins.h>//定义按键所在位sbit K1=P0^0;sbit K2=P0^1;sbit K3=P0^2;sbit K4=P0^3;sbit K5=P0^4;unsigned char led;unsigned char j;void delayms(unsigned char ms) // 1ms标准延时{while(ms--){for(j=0;j<110;j++); //还是无法设置比较标准的延时,如1S等;所以应该用定时器延时才最准确}}void main(){ //P2=led;unsigned int i;while(1){/********************************************** 当K1按下时,灯从0xfe向左跑一遍; **********************************************/if(K1==0)delayms(10); //消除键盘抖动if(K1==0){led=0xfe;for(i=0;i<7;i++) //i可以去8的倍数,表示本电路执行多少次{//led=0x7f; // P端口的初定义要在循环外面,不然会使效果错乱P2=led; //由于这里已经初设一个灯,所以for里面要加上这一个delayms(100); //起初这里设置500MS,使按键每按一下灯彩走一个,不能达到要求。
51单片机特殊功能寄存器

51单片机特殊功能寄存器一、中断控制寄存器IE功能解释:1、EA:中断总开关,如果它等于0,则所有中断不允许。
2、X:无效位;3、ET2:定时器2中断允许;4、ES:串行口中断允许;5、ET1:定时器1中断允许;6、EX1:外部中断1中断允许;7、ET0:定时器0中断允许;8、EX0:外部中断0中断允许;二、中断标志及外部中断方式选择寄存器TCON功能解释1、TF1:定时器/计数器1(T1)的溢出中断标志。
当T1从初值开始加1计数到计数满,产生溢出时,由硬件使TF1置“1”,直到CPU响应中断时有硬件复位;2、TR1:T1的运行控制位,该位置1或清0用来实现启东计数或停止计数;3、TF0:定时器/计数器0(T0)的溢出标志位,其作用同TF1;4、TR0:T0的运行控制位,该位置1或清0用来实现启东计数或停止计数;5、IE1:外部中断1中断请求标志位,如果IT1 = 1,则外部中断1引脚P3.1上的电平有1变0时,IE1由硬件置位,外部中断1请求中断。
在CPU响应该中断时由硬件清0;6、IT1:外部中断源1触发方式控制位,边沿/电平触发模式。
7、IE0:外部中断0中断请求标志位,功能同IE1;8、IT0:外部中断源0触发方式控制位,边沿/电平触发模式。
三、定时器方式控制寄存器TMOD高4位(D7-D4)用于定时器1,低四位(D3-D0)用于定时器0;1、Gate:定时器/计数器运行控制位,用来确定外部中断请求引脚(INT0,INT1)是否参与T0或T1的操作控制。
当Gate=0时,只要定时器控制寄存器TCON中的TR0(或TR1)被置1时,T0(或T1)被允许开始计数;当Gate=1时,不仅要TCON中的TR0或TR1置位,还需要P3口的P3.2或P3.3引脚为高电平,才允许计数;2、C/T:定时器方式或计数器方式选择位。
C/T = 1时,为计数器方式;C/T = 0时为定时器模式。
3、M1,M0:定时器四种工作方式选择位:4、四、UART控制寄存器SCON功能解释:1、SMO,SM1:串行口操作方式选择位,两个选择位对应四种状态。
51单片机填空题
【1】二、填空题(每空1分,共30分)1.一个完整的微机系统由硬件和软件两大部分组成。
2.8051 的引脚RST是IN脚(IN脚还是OUT脚),当其端出现高电平时,8051进入复位状态。
8051一直维持这个值,直到RST脚收到低电平,8051才脱离复位状态,进入程序运行状态,从ROM 0000 H单元开始取指令并翻译和执行。
3.半导体存储器分成两大类:RAM ROM,其中RAM 具有易失性,常用于存储临时性数据。
4.求十进制数-102的补码(以2位16进制数表示),该补码为9AH 。
5.PC存放_CPU将要执行的指令所在的ROM单元的地址,具有自动加1特性。
在8051中决定程序执行顺序的是PC还是DPTR PC ?它是16位?不是(是,不是)SFG?6.123= 01010010 B= 52 H。
7.8051内部有 4 个并行口,P0口直接作输出口时,必须外接上拉电阻;并行口作输入口时,必须先将口锁存器置1 ,才能读入外设的状态。
8.MCS-51的堆栈只可设置在内RAM低128B区,其最大容量为128B ,存取数据的原则是先进后出。
堆栈寄存器SP是8 位寄存器,存放堆栈栈顶的地址。
9.中断处理的全过程分为以下3个段:中断请求、中断响应、中断服务。
10.定时和计数都是对脉冲进行计数,定时与计数的区别是定时是对周期已知的脉冲计数;计数是对周期未知的脉冲计数【2】。
一、填空题(每空格1分,共10分)1.MCS—51布尔处理机的存储空间是_______。
2.P2口通常用作_______,也可以作通用的I/O口使用。
3.若由程序设定RS1、RS0=01,则工作寄存器R0~R7的直接地址为______。
4.8051的堆栈区一般开辟在_______。
5.所谓寻址,其实质就是_______。
6.存储器映象是_______。
7.定时器中断请求发生在_______。
8.中断响应时间是指______。
9.通过CPU对I/O状态的测试,只有I/O已准备好时才能进行I/O传送,这种传送方式称为_______。
51单片机多段数码管显示原理
51单片机多段数码管显示原理1.引言多段数码管是一种常见的显示装置,由多个发光二极管(LED)组成。
51单片机是一种常用的微控制器,广泛应用于各种嵌入式系统和电子设备中。
本文将介绍51单片机如何控制多段数码管进行显示。
2.多段数码管基本原理多段数码管由7个LED组成,分别是a、b、c、d、e、f、g。
通过控制这些LED的亮灭和组合,可以显示0至9的数字,以及一些字母和特殊字符。
对于通常的7段数码管,通过组合控制LED的亮灭状态,即可实现各种数字的显示。
比如要显示数字0,需要同时点亮a、b、c、d、e、f这六个LED,而其他数字则只需点亮其中的一部分。
3.控制多段数码管的硬件连接为了控制多段数码管,我们需要先对其进行硬件连接。
每个LED需要连接到51单片机的一个IO口上,通过控制IO口的高低电平来控制LED的亮灭。
当控制端口输出高电平时,LED会发出光亮,反之则不亮。
4.使用共阳极数码管和共阴极数码管数码管分为共阳极数码管和共阴极数码管两种类型。
它们的区别在于LED的极性不同。
共阳极数码管的正极连接到VCC,通过拉低对应的IO口来点亮LED;共阴极数码管的负极连接到GND,通过拉高对应的IO口来点亮LED。
5.控制多段数码管的原理在51单片机中,通过控制IO口的输出值,可以控制多段数码管的亮灭。
当需要显示某个数字时,需要按照相应的真值表,控制对应的IO口输出高低电平。
下面是一个示例:数字亮灭情况真值表0 abcdef 11111101 bc 01100002 abdeg 11011013 abcdg 11110014 bcfg 01100115 acdfg 10110116 acdefg 10111117 abc 11100008 abcdefg 11111119 abcfg 1111011通过查表可以得出一个数字所对应的亮灭情况,然后将对应的IO 口配置为输出模式,并设置相应的输出值(高或低电平)即可实现对多段数码管的控制。
51单片机IO端口的四种输入输出模式

51单片机I O端口的四种输入输出模式-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN51单片机IO端口的四种输入输出模式 (by wuleisly)单片机I O口的使用对所有单片机玩家来说都是“家常便饭”,但是你真的了解I O口吗你真的能按你的需要配置I O口吗一、准双向口输出准双向口输出类型可用作输出和输入功能而不需重新配置口线输出状态。
这是因为当口线输出为1时驱动能力很弱,允许外部装置将其拉低。
当引脚输出为低时,它的驱动能力很强,可吸收相当大的电流。
(准双向口有3个上拉晶体管适应不同的需要)准双向口读外部状态前,要先锁存为‘1’,才可读到外部正确的状态.二、强推挽输出推挽输出配置的下拉结构与开漏输出以及准双向口的下拉结构相同,但当锁存器为1时提供持续的强上拉。
推挽模式一般用于需要更大驱动电流的情况。
三、仅为输入(高阻)输入口带有一个施密特触发输入以及一个干扰抑制电路。
四、开漏输出配置(若外加上拉电阻,也可读)当口线锁存器为0时,开漏输出关闭所有上拉晶体管。
当作为一个逻辑输出时,这种配置方式必须有外部上拉,一般通过电阻外接到V c c。
如果外部有上拉电阻,开漏的I/O口还可读外部状态,即此时被配置为开漏模式的I/O口还可作为输入I/O口。
这种方式的下拉与准双向口相同。
开漏端口带有一个施密特触发输入以及一个干扰抑制电路。
关于I/O口应用注意事项:1.有些是I/O口由低变高读外部状态时,读不对,实际没有损坏,软件处理一下即可。
因为1T的8051单片机速度太快了,软件执行由低变高指令后立即读外部状态,此时由于实际输出还没有变高,就有可能读不对,正确的方法是在软件设置由低变高后加1到2个空操作指令延时,再读就对了.有些实际没有损坏,加上拉电阻就OK了有些是外围接的是N P N三极管,没有加上拉电阻,其实基极串多大电阻,I/O口就应该上拉多大的电阻,或者将该I/O口设置为强推挽输出.2.驱动LE D发光二极管没有加限流电阻,建议加1K以上的限流电阻,至少也要加470欧姆以上做行列矩阵按键扫描电路时,实际工作时没有加限流电阻,实际工作时可能出现2个I/O口均输出为低,并且在按键按下时,短接在一起,我们知道一个C M O S电路的2个输出脚不应该直接短接在一起,按键扫描电路中,此时一个口为了读另外一个口的状态,必须先置高才能读另外一个口的状态,而8051单片机的弱上拉口在由0变为1时,会有2时钟的强推挽高输出电流输出到另外一个输出为低的I/O口,就有可能造成I/O口损坏.建议在其中的一侧加1K限流电阻,或者在软件处理上,不要出现按键两端的I/O口同时为低.一种典型三极管控制电路:如果用弱上拉控制,建议加上拉电阻R1~10K),如果不加上拉电阻R1~10K),建议R2的值在15K以上,或用强推挽输出。
单片机原理和应用课后习题参考答案解析1~6章
《单片机原理及应用》习题答案第一章计算机基础知识1-1 微型计算机主要由哪几部分组成?各部分有何功能?答:一台微型计算机由中央处理单元(CPU)、存储器、I/O接口及I/O设备等组成,相互之间通过三组总线(Bus):即地址总线AB、数据总线DB和控制总线CB来连接。
CPU由运算器和控制器组成,运算器能够完成各种算术运算和逻辑运算操作,控制器用于控制计算机进行各种操作。
存储器是计算机系统中的“记忆”装置,其功能是存放程序和数据。
按其功能可分为RAM和ROM。
输入/输出(I/O)接口是CPU与外部设备进行信息交换的部件。
总线是将CPU、存储器和I/O接口等相对独立的功能部件连接起来,并传送信息的公共通道。
1-3 什么叫单片机?其主要由哪几部分组成?答:单片机(Single Chip Microcomputer)是指把CPU、RAM、ROM、定时器/计数器以及I/O接口电路等主要部件集成在一块半导体芯片上的微型计算机。
1-4 在各种系列的单片机中,片内ROM的配置有几种形式?用户应根据什么原则来选用?答:单片机片内ROM的配置状态可分四种:(1)片内掩膜(Mask)ROM型单片机(如8051),适合于定型大批量应用产品的生产;(2)片内EPROM型单片机(如8751),适合于研制产品样机;(3)片内无ROM型单片机(如8031),需外接EPROM,单片机扩展灵活,适用于研制新产品;(4)EEPROM(或Flash ROM)型单片机(如89C51),内部程序存储器电可擦除,使用更方便。
1-5 写出下列各数的另两种数制的表达形式(二、十、十六进制)1-6 写出下列各数的BCD参与:59:01011001,1996:0001100110010110,4859.2:0100100001011001.0010389.41:001110001001.01000001第二章 MCS-51单片机的硬件结构2-1 8052单片机片内包含哪些主要逻辑功能部件?答:8052单片机片内包括:①8位中央处理器CPU一个②片内振荡器及时钟电路③256B数据存储器RAM。
单片机原理及应用总结归纳课后习题参考答案1~6章

精心整理《单片机原理及应用》习题答案第一章计算机基础知识1-1 微型计算机主要由哪几部分组成?各部分有何功能?答:一台微型计算机由中央处理单元(CPU)、存储器、I/O接口及I/O设备等组成,相互之间通过三组总线(Bus):即地址总线AB、数据总线DB和控制总线CB来连接。
CPU由运算器和控制器组成,运算器能够完成各种算术运算和逻辑运算操作,控制器用于控制和ROM。
I/O1-6 写出下列各数的BCD参与:59:01011001,1996:0001100110010110,4859.2:0100100001011001.0010389.41:001110001001.01000001第二章 MCS-51单片机的硬件结构2-1 8052单片机片内包含哪些主要逻辑功能部件?答:8052单片机片内包括:①8位中央处理器CPU一个②片内振荡器及时钟电路③256B数据存储器RAM。
④8KB片内程序存储空间ROM⑤21个特殊功能寄存器SFR⑥4个8位并行I/O端口(32条线)⑦1个可编程全双工串行口⑧可寻址64KB的外部程序存储空间和外部数据存储空间⑨3个16位的定时器/计数器⑩6个中断源、2个优先级嵌套中断结构2-2 8052答:⑴8052的存储器分为6个编址空间:①片内ROM的容量为8KB,其地址为②可扩展片外ROM的容量为64KB,其地址为片内RAM的容量为256B,其地址为00H~FFH RAM低区,④另128B为片内RAM高区,其地址空间为⑤可扩展片外RAM的容量为64KB,其地址为⑥特殊功能寄存器SFR的空间为128B26BCPU第31脚EA接高电平时, CPU将从片内程序存储器0000H1FFFH时,会自动转向片外程ROM的0000H单元开始执行。
CPU,低区128B地址空间00H~7FH中地址为00H~1FH 这32表示,通过工作寄存器指令进行访问。
片内RAM 中的16个单元共128位中的每一位又可单独00H`7FH;对片内高区128B寻址只能用CPU通过指令MOVX访问片外数据存储器。
采用调用51自带的左移右移函数实现彩灯闪烁控制论

采用调用51自带的左移右移函数实现彩灯闪烁控制论彩灯闪烁控制,也称为跑马灯,是一种常见的照明应用。
在这个项目中,我们将使用51单片机的左移和右移函数来实现彩灯的跑马灯效果。
首先,我们需要知道51单片机的左移和右移操作。
在51单片机中,左移操作符<<表示将一些数的二进制表示向左移动n位,右边用0填充。
右移操作符>>表示将一些数的二进制表示向右移动n位,左边用符号位填充。
这两个操作都是逻辑操作,不会改变数的符号。
接下来,我们可以使用51单片机的GPIO口来控制彩灯的亮和暗。
假设我们使用8个LED灯,那么我们就需要8个GPIO口来控制每个LED的亮灭。
以下是利用左移和右移函数实现彩灯闪烁控制的基本步骤:1.设置51单片机的GPIO口为输出模式,用于控制LED灯。
2.初始化闪烁控制变量和计数器变量。
3.使用一个循环来不断更新LED灯的状态。
4.在循环中,通过调用左移和右移函数,根据计数器变量的值来更新LED灯的状态。
5.控制LED灯的亮和暗,可以使用51单片机的GPIO口的高电平和低电平来实现。
6.根据需要,可以调整闪烁速度和亮灭的模式。
下面是一个简单的示例程序:```c#include <reg51.h>sbit led1 = P1^0; // 假设P1口连接第一个LED灯sbit led2 = P1^1; // 假设P1口连接第二个LED灯//...//假设P1口连接第八个LED灯void delay(unsigned int count)unsigned int i, j;for(i = 0; i < count; i++)for(j = 0; j < 120; j++);void maiunsigned int count = 0;//初始化GPIO口led1 = 0;led2 = 0;//...//初始化其它LED灯while(1)//更新LED灯的状态led1 = count & 0x01;led2 = count & 0x02;//...//更新其它LED灯的状态//控制LED灯的亮和暗delay(1000); // 控制闪烁速度led1 = 0;led2 = 0;//...//控制其它LED灯的亮和暗//更新计数器变量count = (count << 1) , (count >> 7); // 控制左移和右移的位数和方向}```以上示例程序只是一个简单的跑马灯实现,具体的实现方式和效果可以根据实际需求进行调整。
MCS51单片机基础知识

MCS-51单片机的基本结构XTAL1XTAL2VCC VSSMCS-51单片机的基本结构:1、微处理器CPU :为8位的CPU ,且内含一个1位CPU (布尔处理器),不仅可以处理字节数据,还可以进行位变量的处理。
2、内部数据存储器(RAM ):128字节片内RAM 。
(8052系列为256字节)3、内部程序存储器(ROM/EPROM/):8031无此器件,8051为4KROM ,8751为4KEPROM 。
4、定时器/计数器:内含2个16位定时/计数器,具有四种工作方式。
5、串行口:1个全双工的串行口,具有四种工作方式。
6、中断控制系统:具有5个中断源,2级中断优先权。
7、P0、P1、P2、P3:为4个并行8位I/O 口。
8、特殊功能寄存器(SFR ):共有21个,用于对片内各功能模块进行管理、控制、监视。
实际上是一些控制寄存器和状态寄存器,是一个特殊功能的RAM 区。
12346758910111213144039383735343633323130292827P1.0P1.1P1.4P1.3P1.2P1.5RST/VPD P1.7P1.6RXD P3.0TXD P3.1T0 P3.4T1 P3.5Vcc P0.0P0.3P0.2P0.1P0.4P0.6P0.5P0.7P2.7PSEN P2.6EA/VPP ALE/PROG 151617181920WR P3.6RD P3.7XTAL1XTAL2VSS262524232121P2.5P2.1P2.2P2.0P2.4P2.3INTO P3.2INT1 P3.389C511、电源、时钟电路VCC(40脚)—+5V电源VSS(20脚)—地XTAL1(19脚)—芯片内部振荡电路(单级反相放大器)输入端。
XTAL2(18脚)—芯片内部振荡电路(单级反相放大器)输出端。
MCS-51的时钟可由内部方式或外部方式产生。
1)内时钟方式利用芯片内部的振荡电路,在XTAL1、XTAL2的引脚上外接定时元件,内部振荡器便能产生自激振荡,用示波器便可以观察到XTAL2输入的正弦波,定时元件可以采用石英晶体和电容组成的并联谐振电路,连接方法如图2.2(a)所示。
单个按键控制4个LED 实验报告(带程序)
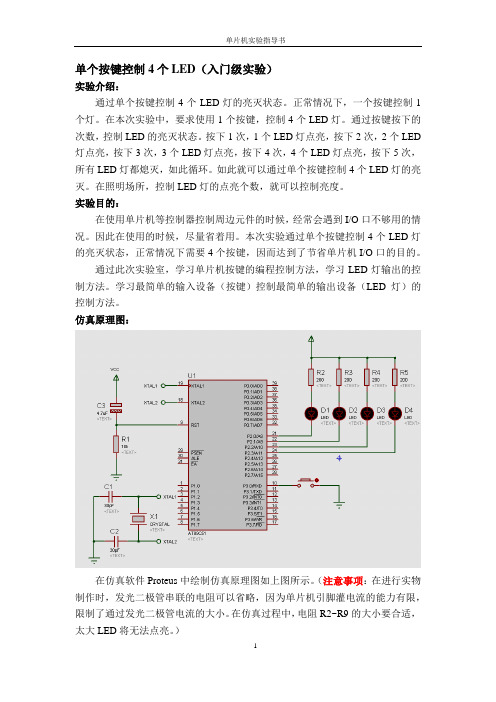
单个按键控制4个LED(入门级实验)实验介绍:通过单个按键控制4个LED灯的亮灭状态。
正常情况下,一个按键控制1个灯。
在本次实验中,要求使用1个按键,控制4个LED灯。
通过按键按下的次数,控制LED的亮灭状态。
按下1次,1个LED灯点亮,按下2次,2个LED 灯点亮,按下3次,3个LED灯点亮,按下4次,4个LED灯点亮,按下5次,所有LED灯都熄灭,如此循环。
如此就可以通过单个按键控制4个LED灯的亮灭。
在照明场所,控制LED灯的点亮个数,就可以控制亮度。
实验目的:在使用单片机等控制器控制周边元件的时候,经常会遇到I/O口不够用的情况。
因此在使用的时候,尽量省着用。
本次实验通过单个按键控制4个LED灯的亮灭状态,正常情况下需要4个按键,因而达到了节省单片机I/O口的目的。
通过此次实验室,学习单片机按键的编程控制方法,学习LED灯输出的控制方法。
学习最简单的输入设备(按键)控制最简单的输出设备(LED灯)的控制方法。
仿真原理图:在仿真软件Proteus中绘制仿真原理图如上图所示。
(注意事项:在进行实物制作时,发光二极管串联的电阻可以省略,因为单片机引脚灌电流的能力有限,限制了通过发光二极管电流的大小。
在仿真过程中,电阻R2~R9的大小要合适,太大LED将无法点亮。
)编程思路:当单片机上电后,所有的I/O口默认高电平,因而四个发光二极管在单片机上电后,都为熄灭状态。
此时,我们按下按键后,就可以调节各个发光二极管的亮灭状态。
当按一次按钮,将P2口的状态进行左移一位,同时将P2的最低位清零,就可以达到按一次按钮后,LED灯多亮一个。
如,当前只有P2口控制的最低位连接的LED点亮,当我们按一次按键,单片机首先将P2的状态循环左移一位,则刚才的最低位变为次低位,也就是倒数第二位点亮,同时将P2口的最低位清零,也就是倒数第一位连接的LED灯点亮,即按一次按钮后,倒数第一位和倒数第二位灯点亮。
其他状态与上述过程类似,这里不再赘述。
C8051F410实现两个LED灯闪烁【定时器1+查询方式】
#include <C8051F410.h> // SFR declarations//-----------------------------------------------------------------------------// Global V ariables//-----------------------------------------------------------------------------sbit LED = P0^5; // LED='1' means ON//-----------------------------------------------------------------------------// Function Prototypes//-----------------------------------------------------------------------------void Port_Init (void); // Port initialization routine void Timer0_Init (void); // Timer0 initialization routinevoid PCA_Init(){PCA0CPM0 = 0x42;PCA0CPH0 = 0xB3;}void Port_IO_Init(){// P0.0 - Skipped, Open-Drain, Digital// P0.1 - Skipped, Open-Drain, Digital// P0.2 - Skipped, Open-Drain, Digital// P0.3 - Skipped, Open-Drain, Digital// P0.4 - CEX0 (PCA), Open-Drain, Digital// P0.5 - Unassigned, Open-Drain, Digital// P0.6 - Unassigned, Open-Drain, Digital// P0.7 - Unassigned, Open-Drain, Digital// P1.0 - Unassigned, Open-Drain, Digital// P1.1 - Unassigned, Open-Drain, Digital// P1.2 - Unassigned, Open-Drain, Digital// P1.3 - Unassigned, Open-Drain, Digital// P1.4 - Unassigned, Open-Drain, Digital// P1.5 - Unassigned, Open-Drain, Digital// P1.6 - Unassigned, Open-Drain, Digital// P1.7 - Unassigned, Open-Drain, Digital// P2.0 - Unassigned, Open-Drain, Digital// P2.1 - Unassigned, Open-Drain, Digital// P2.2 - Unassigned, Open-Drain, Digital// P2.3 - Unassigned, Open-Drain, Digital// P2.4 - Unassigned, Open-Drain, Digital// P2.5 - Unassigned, Open-Drain, Digital// P2.6 - Unassigned, Open-Drain, Digital// P2.7 - Unassigned, Open-Drain, DigitalP0SKIP = 0x0F;XBR1 = 0x41;}void Init_Device(void){PCA_Init();Port_IO_Init();}//-----------------------------------------------------------------------------// main() Routine//-----------------------------------------------------------------------------void main (void){ static int n=0;PCA0MD &= ~0x40; // Clear watchdog timer enableInit_Device();OSCICN |= 0x04; // Force Internal Osc. 1:8 prescalerwhile ((OSCICN & 0x40 ) == 0); // Wait until stableTimer0_Init (); // Initialize the Timer0Port_Init (); // Init Portswhile (1) // Loop forever{if (TF0==1){n++;TL0 =0x23;TH0 = 0xce; // Init the Timer1 register // Toggle the LEDTF0 = 0;}if(n==10){LED = ~LED;n=0;}}}//-----------------------------------------------------------------------------// Initialization Subroutines//-----------------------------------------------------------------------------//-----------------------------------------------------------------------------// Port_Init//-----------------------------------------------------------------------------//// Return V alue : None// Parameters : None//// This function configures the crossbar and GPIO ports.//// Pinout://// P2.1 -> LED//// all other port pins unused////-----------------------------------------------------------------------------void Port_Init (void){XBR1 = 0x40; // Enable crossbarP2MDOUT = 0x02; // Set LED to push-pull }//-----------------------------------------------------------------------------// Timer0_Init//-----------------------------------------------------------------------------void Timer0_Init(void){TMOD = 0x01; // Timer0 uses SYSCLK/12TL0 = 0x23;TH0 = 0xCE; // Init the Timer1 register TR0=1;ET0 = 1; // Timer0 interrupt enabled}//-----------------------------------------------------------------------------// End Of File//-----------------------------------------------------------------------------//-----------------------------------------------------------------------------// F41x_Timer2_16bitReloadTimer.c//-----------------------------------------------------------------------------// Copyright 2006 Silicon Laboratories, Inc.// //// Program Description://// This program presents an example of use of the Timer2 of the C8051F41x's in// 16-bit reload counter/timer mode. It uses the 'F41xDK as HW platform.//// The timer reload registers are initialized with a certain value so that// the timer counts from that value up to FFFFh and when it overflows an// interrupt is generated and the timer is automatically reloaded.// In this interrupt the ISR toggles the LED.//// Pinout://// P2.1 -> LED//// all other port pins unused//// How To Test://// 1) Open the F41x_Timer2_16bitReloadTimer.c file in the Silicon Labs IDE.// 2) If a change in the interrupt period is required, change the value of// LED_TOGGLE_RA TE.// 3) Compile and download the code.// 4) V erify the LED pins of J5 are populated on the 'F41x TB.// 5) Run the code.// 6) Check that the LED is blinking////// FID: 41X000044// Target: C8051F41x// Tool chain: KEIL C51 7.20 / KEIL EV AL C51// Command Line: None//// Release 1.0// -Initial Revision (CG)// -08 Mar 2006////-----------------------------------------------------------------------------// Includes//-----------------------------------------------------------------------------#include <C8051F410.h> // SFR declarations//-----------------------------------------------------------------------------// Global Constants//-----------------------------------------------------------------------------#define SYSCLK 24500000/8 // SYSCLK in Hz (24.5 MHz internal// oscillator / 8)// the internal oscillator has a// tolerance of +/- 2%#define TIMER_PRESCALER 12 // Based on Timer2 CKCON and TMR2CN// settings#define LED_TOGGLE_RA TE 50 // LED toggle rate in milliseconds// if LED_TOGGLE_RA TE = 1, the LED will// be on for 1 millisecond and off for// 1 millisecond// There are SYSCLK/TIMER_PRESCALER timer ticks per second, so// SYSCLK/TIMER_PRESCALER/1000 timer ticks per millisecond.#define TIMER_TICKS_PER_MS SYSCLK/TIMER_PRESCALER/1000// Note: LED_TOGGLE_RA TE*TIMER_TICKS_PER_MS should not exceed 65535 (0xFFFF) // for the 16-bit timer#define AUX1 TIMER_TICKS_PER_MS*LED_TOGGLE_RA TE#define AUX2 -AUX1#define TIMER2_RELOAD AUX2 // Reload value for Timer2sbit LED = P0^5; // LED='1' means ON//-----------------------------------------------------------------------------// Function Prototypes//-----------------------------------------------------------------------------void Port_Init (void); // Port initialization routine void Timer2_Init (void); // Timer2 initialization routine//-----------------------------------------------------------------------------// Global V ariables//-----------------------------------------------------------------------------sfr16 TMR2RL = 0xCA; // Timer2 Reload Register sfr16 TMR2 = 0xCC; // Timer2 Register//-----------------------------------------------------------------------------// main() Routine//-----------------------------------------------------------------------------void PCA_Init(){PCA0CPM0 = 0x42;PCA0CPH0 = 0xB3;}void Port_IO_Init(){// P0.0 - Skipped, Open-Drain, Digital// P0.1 - Skipped, Open-Drain, Digital// P0.2 - Skipped, Open-Drain, Digital// P0.3 - Skipped, Open-Drain, Digital// P0.4 - CEX0 (PCA), Open-Drain, Digital// P0.5 - Unassigned, Open-Drain, Digital// P0.6 - Unassigned, Open-Drain, Digital// P0.7 - Unassigned, Open-Drain, Digital// P1.0 - Unassigned, Open-Drain, Digital// P1.1 - Unassigned, Open-Drain, Digital// P1.2 - Unassigned, Open-Drain, Digital// P1.3 - Unassigned, Open-Drain, Digital// P1.4 - Unassigned, Open-Drain, Digital// P1.5 - Unassigned, Open-Drain, Digital// P1.6 - Unassigned, Open-Drain, Digital// P1.7 - Unassigned, Open-Drain, Digital// P2.0 - Unassigned, Open-Drain, Digital// P2.1 - Unassigned, Open-Drain, Digital// P2.2 - Unassigned, Open-Drain, Digital// P2.3 - Unassigned, Open-Drain, Digital// P2.4 - Unassigned, Open-Drain, Digital// P2.5 - Unassigned, Open-Drain, Digital// P2.6 - Unassigned, Open-Drain, Digital// P2.7 - Unassigned, Open-Drain, DigitalP0SKIP = 0x0F;XBR1 = 0x41;}void Init_Device(void){PCA_Init();Port_IO_Init();}void main (void){PCA0MD &= ~0x40; // Clear watchdog timer enable Init_Device();OSCICN |= 0x04; // Force Internal Osc. 1:8 prescaler while ((OSCICN & 0x40 ) == 0); // Wait until stableTimer2_Init (); // Initialize the Timer2Port_Init (); // Init PortsEA = 1; // Enable global interruptswhile (1); // Loop forever}//-----------------------------------------------------------------------------// Initialization Subroutines//-----------------------------------------------------------------------------//-----------------------------------------------------------------------------// Port_Init//-----------------------------------------------------------------------------//// Return V alue : None// Parameters : None//// This function configures the crossbar and GPIO ports.//// Pinout://// P2.1 -> LED//// all other port pins unused////-----------------------------------------------------------------------------void Port_Init (void){XBR1 = 0x40; // Enable crossbarP2MDOUT = 0x02; // Set LED to push-pull}//-----------------------------------------------------------------------------// Timer2_Init//-----------------------------------------------------------------------------//// Return V alue : None// Parameters : None//// This function configures Timer2 as a 16-bit reload timer, interrupt enabled.// Using the SYSCLK at 16MHz/8 with a 1:12 prescaler.//// Note: The Timer2 uses a 1:12 prescaler. If this setting changes, the// TIMER_PRESCALER constant must also be changed.//-----------------------------------------------------------------------------void Timer2_Init(void){CKCON &= ~0x60; // Timer2 uses SYSCLK/12TMR2CN &= ~0x01;// TMR2RL = TIMER2_RELOAD; // Reload value to be used in Timer2 TMR2RL=-12760;TMR2 = TMR2RL; // Init the Timer2 registerTMR2CN = 0x04; // Enable Timer2 in auto-reload mode ET2 = 1; // Timer2 interrupt enabled}//-----------------------------------------------------------------------------// Interrupt Service Routines//-----------------------------------------------------------------------------//----------------------------------------------------------------------------- // Timer2_ISR//----------------------------------------------------------------------------- //// Here we process the Timer2 interrupt and toggle the LED////----------------------------------------------------------------------------- void Timer2_ISR (void) interrupt 5{ static int i=0;i++;if(i==10){LED = ~LED;i=0;} // Toggle the LEDTF2H = 0; // Reset Interrupt}//----------------------------------------------------------------------------- // End Of File//-----------------------------------------------------------------------------。