高速摄像中的亚像素处理技术
opencv 亚像素 算法
亚像素算法亚像素算法的基本思路就是将一个像素再分为更小的单位。
也就是说1个像素的灰度值分为256级。
所以,以这类系统为例,进行亚像素计算就要把像素分为255个小单位。
或许,可以这样来理解“亚像素算法”。
一个像素的灰度值从0到255,0是纯黑,255是纯白。
不妨把像素想像成是一个由255个小像素所组成的集合。
而每个小像素都是一个独立的小镜子,那就是说一个像素里面有255个小镜子。
灰度值则可以看作反光的小镜子数量:0表示255个小镜子全都没有反光;255表示255个镜子一起反光。
上面讲到的所设定的临界灰度值100,则可表示255个镜子中有100个在反光,另外155个镜子没有反光。
现在,回到上面的测量例子中来。
如何算亚像素值呢?非常简单,亚像素值(白色部分)=该像素灰度值/256;亚像素值(黑色部分)=1-亚像素值(白色部分)。
另外,除了这种计算方法,还有其他几种计算亚像素值的方法:(1)亚像素值(白色部分)=(该像素灰度值×(临界灰度值/256))/256 亚像素值(黑色部分)=1-亚像素值(白色部分)(2)亚像素值(白色部分)=后像素值/ (前像素值+后像素值)亚像素值(黑色部分)=1-亚像素值(白色部分)(3)亚像素值(白色部分)=(像素值-前像素值)/ (后像素值-前像素值)亚像素值(黑色部分)=1-亚像素值(白色部分)以上就是亚像素算法的基本原理。
在结束这个算法讨论之前,有两点必须注意:一是在实际情况下,大家不可能看到像素的一半是黑色另一半是白色,这只是为了方便大家理解所画出来的,而真实的情况是一个像素就只是一小块灰色,没有明暗的分别。
明暗的区别只能在像素与像素间显现出来;二是在描述亚像素的基本算法时,所说“小镜子”的概念完全是为了方便大家理解,比纯数学语言表达更为易懂。
亚像素英文名:Sub Pixel 定义:面阵摄像机的成像面以像素为最小单位。
例如某CMOS摄像芯片,其像素间距为5.2微米。
亚像素细分梯度法

亚像素细分梯度法
亚像素细分梯度法(Subpixel refinement gradient method)是一种用于提高数字图像分辨率的技术。
在传统图像处理中,像素是图像的最小单位,而亚像素是对像素的进一步细分。
亚像素细分梯度法利用图像中像素之间的灰度变化信息,通过插值和优化算法来计算出亚像素级别的图像信息。
它通过对像素的位置和灰度进行微小调整,从而实现对图像的细化操作,从而提高图像的分辨率。
亚像素细分梯度法通常包括以下步骤:
1. 计算像素的梯度:通过计算像素周围相邻像素的灰度差异,得到像素的梯度信息。
2. 初始化亚像素位置:通过插值方法(如双线性插值)估计亚像素位置的初始值。
3. 优化亚像素位置:采用优化算法(如梯度下降法)迭代计算亚像素的最优位置,使得像素的梯度最小化。
4. 重复步骤2和3,直到达到收敛条件。
5. 输出亚像素图像:将得到的亚像素位置和灰度信息进行插值操作,生成亚像素级别的图像。
亚像素细分梯度法可以广泛应用于图像超分辨率重建、图像插值、运动估计等领域。
它能够在保持图像中细节信息的提高图像的清晰度和分辨率。
亚像素级点定位及边缘定位算法

亚像素级点定位及边缘定位算法亚像素级点定位及边缘定位算法是在图像处理领域中用于准确定位图像中的点及边缘的算法。
亚像素级定位是针对像素级定位的扩展,能够提供更高精度的定位结果,可以用于诸如图像匹配、目标跟踪等任务。
而边缘定位算法则是用于检测图像中的边缘特征。
1.亚像素插值法:亚像素插值法通过对像素值进行插值计算,来获得更精准的点坐标。
最常见的亚像素插值方法是双线性插值法和双三次插值法。
双线性插值法通过对图像中四个最近的像素进行线性插值来得到亚像素级的点位置。
而双三次插值法则是在四个最近的像素的基础上,通过对像素值进行三次插值来获得更高精度的点坐标。
2.亚像素匹配法:亚像素匹配法是通过匹配目标的特征点来实现亚像素级点定位。
常见的亚像素匹配算法包括亚像素级角点匹配和亚像素级互相关匹配。
亚像素级角点匹配通过对图像中的角点进行亚像素级匹配来得到目标点的亚像素级位置。
亚像素级互相关匹配则是通过计算图像中两个目标区域的互相关性来获得亚像素级位置。
边缘定位算法则是通过分析图像中的灰度变化来检测图像中的边缘特征。
常见的边缘定位算法包括Sobel算子、Canny算子等。
1. Sobel算子:Sobel算子是一种基于图像灰度一阶导数的边缘检测算法。
它通过计算图像灰度值在水平和垂直方向上的变化来检测图像中的边缘。
Sobel算子通过将图像卷积与特定的模板来实现边缘检测,其中模板包含了对灰度变化敏感的权重。
2. Canny算子:Canny算子是一种基于图像灰度二阶导数的边缘检测算法。
与Sobel算子相比,Canny算子对噪声有很强的抑制能力,并能够提供更准确的边缘定位结果。
Canny算子通过计算图像的梯度幅值和方向来检测边缘,在筛选和连接边缘点时能够基于边缘强度和连接性进行优化。
综上所述,亚像素级点定位及边缘定位算法能够提供更高精度的定位结果,可应用于各种图像处理任务中。
这些算法通过插值、匹配、边缘检测等方法来实现图像点和边缘的精确定位。
高速摄像的原理

高速摄像的原理
高速摄像是一种利用高帧率摄像机记录和呈现高速运动或快速变化的现象的技术。
其原理主要包括以下几个方面:
1. 高帧率摄像机:高速摄像所使用的摄像机具有较高的帧率,即每秒记录的图像数量。
传统的摄像机通常以每秒25或30帧的速度拍摄,但高速摄像机的帧率可以高达几千帧或甚至更高。
这样可以捕捉到微秒甚至纳秒级别的高速运动。
2. 快速光闪光:为了在极短的时间内记录清晰的图像,高速摄像通常伴随着快速光闪光源的使用。
快速光闪光可以在非常短的时间内发出强光,使被拍摄的对象在极短的时间内被照亮,从而减少运动模糊。
3. 快速曝光时间:高速摄像机具有可调节的曝光时间,以确保在快速运动过程中每一帧都能够采集到足够的光线。
快速曝光时间可以避免由于高速运动而导致的模糊或失真现象,使得图像更加清晰。
4. 快速图像传输和储存:高速摄像机通常配备了高速数据传输和存储设备,以便能够快速记录和保存高帧率的图像序列。
这些设备可以帮助用户快速获取和分析所需的图像数据。
总的来说,高速摄像的原理是通过高帧率摄像机、快速光闪光源、可调节的曝光时间以及高速数据传输和存储设备等组成的系统,能够捕捉和记录高速运动或快速变化的现象。
这种技术被广泛应用于科学研究、工程测试、医学诊断等领域。
什么是工业相机亚像素

面阵摄像机的成像面以像素为最小单位。
例如某CMOS摄像芯片,其像素间距为5.2微米。
摄像机拍摄时,将物理世界中连续的图像进行了离散化处理。
到成像面上每一个像素点只代表其附近的颜色。
至于“附近”到什么程度?就很困难解释。
两个像素之间有5.2微米的距离,在宏观上可以看作是连在一起的。
但是在微观上,它们之间还有无限的更小的东西存在。
这个更小的东西我们称它为“亚像素”。
实际上“亚像素”应该是存在的,只是硬件上没有个细微的传感器把它检测出来。
于是软件上把它近似地计算出来。
一般用分辨率这个名词来描述CCD芯片上的行列数。
实际上,CCD芯片是一个抽样器件,它的最大抽样率由抽样定律决定,即抽样率必须高于奈奎斯特频率的2倍。
抽样理论在一维时间信号中得到了广泛的使用,但并没有被完全的应用到CCD芯片的信号采样中。
能够通过亚像素算术来提高CCD芯片的抽样率,理论就是把一个像素看作是由亚像素组成的子图像。
通常,我们能够处理亚分辨率为10×10亚像素的图像。
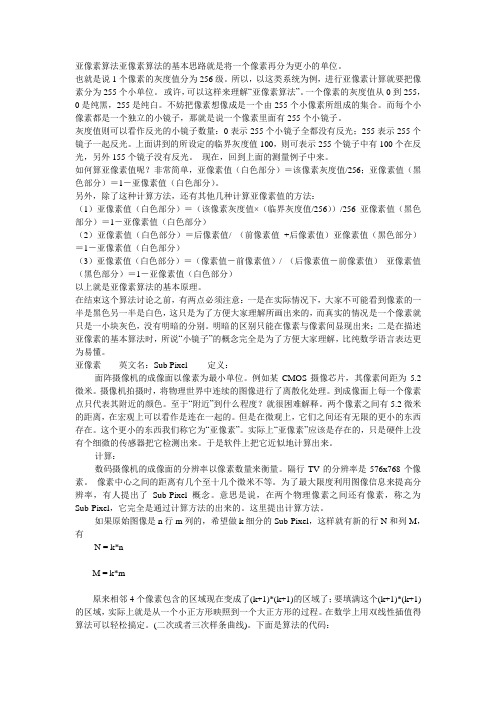
一个典型的例子就是决定一个斑点的重心(如下图a所示)。
由于积分特性,原始像素位置误差与其本身输出相同。
假设一个灰度级的一维图像如图 b所示,如果灰度值的转折点刚好出现在像素的边缘,那么容易确切得知道轮廓点的位置。
但实际的转折点可能不在一个理想的级别,我们不能够准确的知道芯片上转折点剪切像素的位置。
另外更重要的,模糊的灰度级允许灰度级差值,因此我们就能够决定亚像素的位置作为灰度级的功能。
不管怎样,只有将CCD芯片内的模拟图像尽可能精确地描绘在图像处理单元的内存中,亚像素算法才能是精确的。
有关亚像素的解释(左图为a、右图为b)。
高速摄像机原理

高速摄像机原理
高速摄像机是一种能够以极高的速度拍摄影像的设备,其原理基于快速曝光和快速读取图像的技术。
在正常的摄像机中,图像是通过逐行曝光的方式获取的。
即摄像机从图像的顶部开始,逐渐扫描至底部。
然而,高速摄像机采用了全局快速曝光的原理。
这意味着在一个非常短的时间内,整个图像都会被曝光。
这种特殊的曝光方式使得高速摄像机能够在非常短的时间内拍摄到快速运动物体的细节。
高速摄像机还采用了快速读取图像的技术。
普通摄像机的帧率通常为每秒25到30帧,而高速摄像机可以达到每秒几千甚至几万帧的帧率。
为实现这一高帧率,高速摄像机使用了先进的传感器和处理器。
传感器能够迅速读取图像信号,并将其传输给处理器进行处理。
处理器能够有效地对图像进行压缩和存储,以确保摄像机能够持续拍摄高质量的影像。
高速摄像机在科学研究、工程测量、运动分析等领域有着广泛的应用。
它可以捕捉到肉眼无法察觉的微小细节和快速变化,为科学家和研究人员提供了宝贵的研究工具。
同时,在工程领域,高速摄像机可以用于检测和分析机械部件的运动状态,帮助工程师改进产品的设计。
总之,高速摄像机利用快速曝光和快速读取图像的原理,能够以极高的帧率捕捉到快速运动的细节。
它在科学研究和工程应用中发挥着重要的作用。
PIV技术简介
PIV(微粒成像速度测量技术)简介39051414 孙飞介绍:PIV是一种测量平面上不同位置瞬时气流速度的技术。
工作原理很简单,在流场中布撒大量反光的示踪粒子,然后用平面光去照射测量平面上的微粒,同时用相机采取两个曝光位置对平面照相。
两次照相应该在短的时间间隔内进行,可以将同一个粒子进行两次照射,这两次照射可以作为一个图的两个不同角度,也可以算作两个图的不同角度,他的工作原理是根据自动关联技术而来的,它的结果并不是很清楚,所以在使用这样的技术时,气流只能在一个方向流动,所以利用两个图的技术应用的更加广泛,下文就是关于这项技术的简介。
测量技术:为了对流场进行拍照,需要在流场中布撒反光微粒。
微粒的大小应能随流场流动并反射足够的光。
总体来说PIV技术相较LDV(激光多普勒测速)技术需要更大密度的反光粒子。
比较好的是经验法则是每个待测速度向量上有10个微粒。
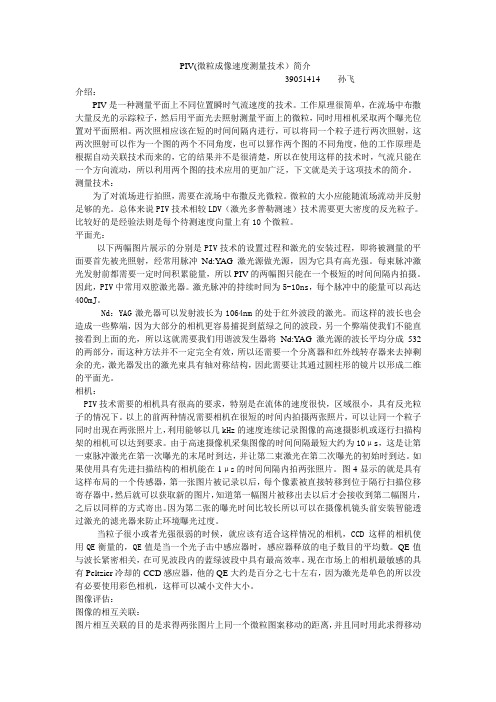
平面光:以下两幅图片展示的分别是PIV技术的设置过程和激光的安装过程,即将被测量的平面要首先被光照射,经常用脉冲Nd:Y AG激光源做光源,因为它具有高光强。
每束脉冲激光发射前都需要一定时间积累能量,所以PIV的两幅图只能在一个极短的时间间隔内拍摄。
因此,PIV中常用双腔激光器。
激光脉冲的持续时间为5-10ns,每个脉冲中的能量可以高达400mJ。
Nd:YAG激光器可以发射波长为1064nm的处于红外波段的激光。
而这样的波长也会造成一些弊端,因为大部分的相机更容易捕捉到蓝绿之间的波段,另一个弊端使我们不能直接看到上面的光,所以这就需要我们用谐波发生器将Nd:Y AG激光源的波长平均分成532的两部分,而这种方法并不一定完全有效,所以还需要一个分离器和红外线转存器来去掉剩余的光,激光器发出的激光束具有轴对称结构,因此需要让其通过圆柱形的镜片以形成二维的平面光。
相机:PIV技术需要的相机具有很高的要求,特别是在流体的速度很快,区域很小,具有反光粒子的情况下。
亚像素算法原理

亚像素算法原理亚像素算法是一种用于图像处理中的技术,旨在提高图像的精度和清晰度。
它通过对图像进行插值,将原本离散的像素点转换为更精细的子像素点,从而实现对图像的细节增强和边缘锐化。
亚像素算法的原理主要包括两个方面:插值和重采样。
插值是亚像素算法的核心。
在传统的图像处理中,像素点是离散的,它们的位置只能在整数坐标上。
而亚像素算法通过插值的方式,在像素点之间进行计算,得到更为精确的坐标位置。
常用的插值方法包括双线性插值、双三次插值等。
这些插值方法可以根据像素点周围的颜色信息,估算出子像素点的颜色值。
重采样是亚像素算法的另一个关键步骤。
插值只是将像素点的位置进行了微调,但并没有改变图像的分辨率。
而重采样则是在插值的基础上,将图像的分辨率进行提升。
通过重复插值的过程,可以将原本一个像素点的区域细分为多个子像素点,从而增加图像的细节和清晰度。
亚像素算法的应用广泛,特别是在数字相机、图像放大、图像重建等领域。
在数字相机中,由于像素的数量有限,拍摄的图像往往会存在一定的模糊度。
而亚像素算法可以通过插值和重采样,提高图像的清晰度,使细节更加清晰可见。
在图像放大和重建中,亚像素算法可以通过对图像进行插值和重采样,恢复图像的细节和清晰度,使放大后的图像更加清晰锐利。
除了上述应用外,亚像素算法还可以用于图像配准、图像拼接和图像去噪等领域。
在图像配准中,亚像素算法可以通过对图像进行插值和重采样,将多个图像的坐标对齐,实现图像的准确对比和匹配。
在图像拼接中,亚像素算法可以通过插值和重采样,将多个图像的细节进行融合,实现图像的平滑过渡和无缝拼接。
在图像去噪中,亚像素算法可以通过插值和重采样,对图像中的噪声进行滤波处理,去除图像中的噪点和干扰,提高图像的质量和清晰度。
亚像素算法是一种用于图像处理中的技术,通过插值和重采样,提高图像的精度和清晰度。
它广泛应用于数字相机、图像放大、图像重建、图像配准、图像拼接和图像去噪等领域。
亚像素算法的原理简单明了,但能够带来显著的效果改善,是图像处理领域中不可或缺的重要技术之一。
亚像素精度的方法
亚像素精度的方法1.超分辨率重建:这是一种通过算法在低分辨率图像基础上重建高分辨率图像的方法。
常见的超分辨率重建方法包括插值、图像锚定、基于统计模型的方法等。
超分辨率重建可以利用图像的局部特征和统计模型,从而在亚像素级别上提供更高的分辨率。
2.亚像素运动估计:这是一种通过检测和测量图像中物体的亚像素级别运动,从而达到提高图像分辨率的目的。
亚像素运动估计可以借助于相关性检测、优化算法等方法,通过对图像序列进行分析,精确地计算物体的位置和运动。
这种方法在视频压缩、运动跟踪等领域有广泛的应用。
3.超分辨率成像:这是一种通过在成像过程中利用亚像素精度的技术,来提高图像的分辨率。
传统的光学成像系统通常受限于传感器的像素大小,而超分辨率成像则通过对物体图像进行多次成像、像素位移等方法,从而实现亚像素级别的图像重建。
超分辨率成像技术可以在医疗、航空、军事等领域中提高图像诊断和监测的精度。
4.图像去模糊:亚像素级别的图像模糊是指由于成像设备或者物体运动等原因导致图像中物体边缘模糊不清的现象。
图像去模糊技术可以通过分析图像的模糊程度和方向,从而对图像进行修复和增强。
常见的图像去模糊方法包括盲复原、基于微分方程的方法等,这些方法可以在像素级别进行图像恢复和处理。
总结起来,亚像素精度的方法包括超分辨率重建、亚像素运动估计、超分辨率成像和图像去模糊等。
这些方法可以通过算法和优化技术,从而在像素级别上提高图像分辨率和准确度。
亚像素精度的方法在图像处理、医学影像、视频压缩等领域有着广泛的应用,为提高图像质量和信息的可用性提供了有效的手段。
一种改进的亚像素边缘检测方法_唐坚刚

中图分类号: TP391. 41
文献标识码: A
一种改进的亚像素边缘检测方法
1, 3 唐坚刚 ,林 1 新 ,任 1 琳 ,李
春
2
( 1. 上海理工大学光电信息与计算机工程学院,上海 200093 ; 2. 上海理工大学能源与动力工程学院,上海 200093 ; 3. 上海医疗器械高等专科学校图文信息中心,上海 200093 )
2
2. 1
Zernike 矩亚像素边缘检测
Zernike 矩定义 y) 的 n 阶 m 次 Zernike 矩为: 离散图像 f( x, Z nm = f( x, y) V * θ) ∑ ∑ nm ( ρ , x y
另外三次 B 样条函数的局部时频性能足以保证大 多数 的 实 际 应 用, 并且 B 样条有很好的紧支性 质
2
0. 0000
0. 0000
- 2. 000 2. 0000
0. 0000
0. 0000
1. 2 ψ
( 1)
小波多尺度边缘检测原理 y) 为二维平滑函数, 设 θ( x , 定义两个小波函数 ( x, y) 和 ψ ψ ψ
( 1) ( 2)
( x, y) , y) θ ( x , x
( x, y) = -
收稿日期: 2013 - 07 - 12 基金项目: 国家自然科学基金( 51176129 / E060703 ) 研究方向为数字图像 男, 副 教 授, 作者 简 介: 唐 坚 刚 ( 1962 - ) , 处理。
。 拟合法, 能
— 1 —
善但是 仍 然 较 粗, 因 而 边 缘 定 位 精 度 较 低。 文 献 [ 6 - 7] 将 Zernike 算法本身加以完善, 分别提高卷 9 × 9, 积的模版至 7 × 7 , 能实现较高边缘的定位。 7] 另外文献[ 利用 Sobel 算子与 Zernike 矩算子结合 进行亚像素精度定位, 用 Sobel 算子先进行粗定位, 再用 Zernike 进行细分, 能较好地检测图像边缘, 但 由于采用了 Sobel 算子, 对噪声比较敏感。 本文在分析传统的 Zernike 算法的基础上, 提出 用 B 样条小波变换的多尺度边缘检测结合 Zernike 矩算子的方法进行亚像素边缘检测 。另外考虑到在 判断边缘时需要人工反复调节选择阈值 。影响效率 及检测精度的问题, 文中在边缘判据的时候结合最 大类熵阈值分割法, 使得检测过程中更方便, 效率 更高。
亚像素级边缘检测技术
摘要边缘指的是图像中像素值有突变的地方。
边缘检测是图像处理的重要的一部分。
边缘往往携带着一幅图像的大部分信息。
在分析对比已有边缘检测算法的基础上,设计了两种边缘检测方法。
第一种方法先用Sobel算子粗定位,然后用三次样条插值函数对灰度图像进行插值,使目标达到亚像素级,对插值后的灰度图像,利用最大类间方差确定阈值,实现亚像素级的边缘检测。
另一种方法是根据灰度矩算子在目标成像前后的矩不变特性,利用Tabatabai等人提出的前三阶灰度矩,实现了亚像素边缘检测。
通过实验对算法有效性和检测精度进行了研究和验证,给出了工件的实测尺寸对比结果。
实验表明,基于灰度矩的亚像素边缘检测算法和基于Sobel算子的亚像素级边缘检测法比传统的边缘检测算子具有更高的定位精度。
关键词:亚像素级边缘检测;基于插值法的边缘检测;灰度矩ABSTRACTEdge refers to the value of the pixel in the image mutations. Edge detection is an important part of image processing. The edges tend to carry most of the information of an image. In this paper, the design two edge detection methods, the first method first used Sobel operator rough location, and then grayscale image interpolation, cubic spline interpolation function so that the target to achieve sub-pixel level grayscale images after interpolation, the use of the maximum variance between the threshold is determined to achieve sub-pixel edge detection. Another method is the gray moment operator in the moments before and after the target imaging invariant Tabatabai, who proposed the first three gray moment, to achieve sub-pixel edge detection, through experiments the effectiveness of the algorithm and testing the accuracy of research and validation, given the comparison of measured dimensions of the workpiece. The experiments show that, based on gray-scale operator sub-pixel edge detection algorithm has a higher positioning and accuracy than the traditional operator to meet the image target to achieve sub-pixel edge detection.Key words:Sub-pixel edge detection;Edge Detection based interpolation;Gray Moment;目录第1章绪论 (1)1.1 课题研究背景及意义 (1)1.2边缘检测的研究历史和发展趋势 (2)1.3 论文研究内容,解决问题和章节安排 (4)第2章经典边缘检测算子 (6)2.1 数字图像的基本概念 (6)2.1.1 图像数字化 (6)2.2Sobel算子 (7)2.3 Prewitt算子 (9)2.4 LoG算子 (10)2.5实验结果及分析 (10)第3章基于SOBEL算子的亚像素级边缘检测 (12)3.1 Sobel算子改进算法 (12)3.2 三次样条插值 (13)3.3 最大类间方差法(Ostu) (14)3.4 算法实现 (16)3.5 实验结果 (17)3.6 实验结果分析 (18)3.7 本章小结 (19)第4章基于灰度矩的亚像素算法 (20)4.1 灰度矩算子 (20)4.2 灰度矩边缘检测算法 (21)4.2.1 灰度值h1和h2的计算 (21)4.2.2 边缘位置 的确定 (23)4.2.3 边缘方向 (24)4.2.4 边缘的判断条件 (24)4.2.5模板效应 (25)4.2.6 算法实现 (26)4.3 实验结果及分析 (27)4.4 本章小结 (30)结论 (32)参考文献 (33)致谢···································································错误!未定义书签。
超高速摄像机的光学原理

超高速摄像机的光学原理
超高速摄像机是一种能够拍摄高速运动物体的摄影设备,它能够以很高的帧率进行拍摄,从而捕捉到细微的运动细节。
其光学原理主要包括快门、透镜系统和传感器。
快门:超高速摄像机使用的快门与普通摄像机的快门相似,但工作速度更快。
快门是一个可以打开和关闭的光学装置,在摄像时打开的时间非常短暂,通常为几微秒甚至更短。
通过这种方式,摄像机可以在非常短的时间内捕捉到高速运动的物体。
透镜系统:超高速摄像机使用的透镜系统通常与普通摄像机相似,它的主要作用是将被摄物体的光线聚焦在传感器上。
然而,为了拍摄高速运动的物体,透镜系统通常需要具有更大的光圈,以便进入更多的光线。
传感器:超高速摄像机的传感器是其最重要的部件,它接收经过透镜系统聚焦后的光线,并将其转化为电信号。
传感器的帧率决定了摄像机拍摄的速度,通常是以每秒帧数(fps)来衡量。
超高速摄像机的传感器通常具有非常高的帧率,能够以数万甚至数十万fps的速度进行拍摄。
除了这些基本的光学原理,超高速摄像机还可能使用其他技术来增强其性能,如全局快门技术、多个传感器阵列等。
这些技术的目的是提高拍摄的速度和分辨率,
以便捕捉到更多的细节。
粒子图像测速互相关中亚像素位移定位的改进方法

粒子图像测速互相关中亚像素位移定位的改进方法第一章:引言- 研究背景- 研究意义- 文章结构第二章:粒子图像测速(Particle Image Velocimetry, PIV)简介- PIV原理- PIV系统构建- PIV数据处理第三章:互相关算法及其存在的问题- 互相关算法原理- 亚像素位移定位问题- 互相关算法存在的问题第四章:改进的互相关算法- 基于插值的亚像素位移定位方法- 基于重叠区域的滑动窗口互相关算法- 比较分析改进算法与传统算法第五章:实验与分析- 实验流程- 实验结果分析- 结论与展望第六章:结论- 文章主要贡献- 可能存在的局限性- 进一步研究的建议第一章:引言研究背景:随着精密制造技术和精密测量技术的不断发展,实验测量技术得到了广泛的应用。
粒子图像测速(PIV)技术是一种常用的非接触式测量流场速度的方法。
PIV技术通过先对流场内的流体进行标记,然后利用两个不同时间间隔内的流场图像进行对比,最终得到流场速度场分布。
然而,由于PIV技术采用的是像素级别的图像采集和处理方法,因此在像素级别上存在位置测量误差,这使得精度受到了限制。
研究意义:为了提高PIV技术的精度和准确性,在PIV技术的研究中,亚像素位移定位技术是一个重要的挑战。
互相关算法是一种广泛应用的位移测量方法,被广泛应用于PIV算法的亚像素位移定位中。
然而,传统的互相关算法存在着一些问题,例如:由于互相关算法是基于像素级别的方法,因此在像素尺度上无法进行亚像素位移测量,这限制了PIV技术的精度和准确性。
因此,本文将探讨基于插值的亚像素位移定位方法和基于重叠区域的滑动窗口互相关算法,以提高PIV技术的测量精度和准确性。
文章结构:本文将包括五个章节:第一章:引言,主要介绍了PIV技术及其测量精度的限制,以及本文研究的意义和阐述了文章的结构。
第二章:将介绍PIV技术的基本原理、系统构建、数据处理等方面的知识。
第三章:将介绍互相关算法及其存在的问题,包括亚像素位移定位问题等。
亚像素原理
亚像素原理
亚像素(Subpixel)是指像素内部的微小单元,它们是构成像素的基本组成部分,也是显示设备和摄像头等数字影像设备的重要组成部分。
亚像素原理是指利用亚像素技术来提高图像的分辨率和显示效果的原理。
在数字影像处理和显示领域,亚像素原理具有重要的应用价值和意义。
亚像素原理的基本原理是利用RGB(红绿蓝)三种基本颜色的亚像素单元来组合形成像素,通过对亚像素的精细控制和调节,可以实现更加细腻和真实的图像显示效果。
在传统的显示设备中,每个像素只包含一个RGB颜色单元,而在利用亚像素原理的显示设备中,每个像素包含了三个亚像素单元,分别对应红、绿、蓝三种颜色,通过对这三种颜色的亚像素进行精细的控制,可以实现更高的分辨率和更真实的色彩表现。
利用亚像素原理可以有效提高显示设备的分辨率和清晰度,使得图像显示更加细腻和真实。
在高清电视、手机屏幕、摄像头等数字影像设备中,亚像素原理被广泛应用,可以有效提高图像的质量和显示效果。
通过对亚像素的精细控制,可以实现更加清晰的图像细节和更真实的色彩表现,使得用户可以获得更好的视觉体验。
除了提高图像的分辨率和显示效果,亚像素原理还可以应用于抗锯齿和平滑处理。
通过对亚像素的微小调节,可以减少锯齿状的边缘和图像的颗粒感,使得图像更加平滑和自然。
这对于数字影像处理和图像显示具有重要的意义,可以提高图像的质量和真实感。
总的来说,亚像素原理是利用亚像素技术来提高图像的分辨率和显示效果的原理。
通过对亚像素的精细控制和调节,可以实现更加细腻和真实的图像显示效果,提高图像的清晰度和真实感。
亚像素原理在数字影像处理和显示领域具有重要的应用价值,可以为用户带来更好的视觉体验。
高速摄像头拍照原理

高速摄像头拍照原理
高速摄像头利用高频率的图像采集和处理技术来实现高速拍照。
其工作原理主要包括以下几个步骤:
1. 光学系统:摄像头使用高质量的镜头来收集周围的光线。
光线经过透镜后会在成像传感器上形成一个倒置的、实际大小的图像。
2. 成像传感器:摄像头通常采用CMOS或CCD两种类型的成
像传感器,用于将光学图像转换成电信号。
这些传感器由一系列光电二极管组成,它们可以感知被收集的光的强度。
3. 图像采集:成像传感器会将场景中的光信号转换成电子信号。
在高速摄像头中,传感器可以以非常高的帧率进行图像采集,通常可以达到每秒数千到数十万帧以上的速度。
4. 快门控制:高速摄像头通常配备快门装置,可控制曝光时间。
快门会在每一帧图像采集完成后关闭,防止被曝光的物体模糊。
5. 图像处理:采集到的图像经过电信号转换后,进一步经过图像处理电路对图像进行增强、去噪等操作。
这些电路可根据具体应用需求进行优化。
6. 数据传输与存储:处理后的图像通过数据总线传输到计算机或存储设备中。
高速摄像头通常配备高速数据接口,以确保快速、稳定的数据传输。
总之,高速摄像头通过精确控制的光学系统、高帧率的图像采集、快门控制和高速数据传输等技术,实现了对高速运动物体的准确捕捉和记录。
这为许多领域的研究和应用提供了强大的工具。
亚像素精度的方法
亚像素精度的方法亚像素精度是指在图像处理中,能够以更高的分辨率对图像进行处理和分析的能力。
在传统的像素级别的图像处理中,每个像素的位置被抽象为一个离散的坐标点,这会导致一些信息的丢失和模糊。
而亚像素精度的方法则通过对图像进行更加精细的处理,能够在像素级别之间的空间进行更加精确的插值和估计,从而提高图像处理的精度和结果的准确性。
1. 亚像素重定位(Sub-pixel registration):亚像素重定位是一种用于图像对齐和配准的技术,目的是通过对图像进行微小的平移、旋转和缩放操作,使得图像在像素级别更加准确地重叠在一起。
常见的亚像素重定位方法包括基于互相关的算法、基于金字塔的算法等。
这些算法通过对图像进行插值和优化,能够在子像素级别对图像进行对齐和配准,提高准确性。
2. 亚像素插值(Sub-pixel interpolation):亚像素插值是一种常见的图像处理方法,用于在像素级别之间对图像进行插值。
常见的亚像素插值方法包括双线性插值、双三次插值、Lanczos插值等。
这些插值方法通过对像素周围的邻近像素进行加权平均,可以获得更精确的图像信息,减少图像处理过程中的模糊和失真。
3. 亚像素定位(Sub-pixel localization):亚像素定位是一种用于图像中物体位置估计的方法,能够对物体在像素级别上的位置进行更加精确的估计。
常见的亚像素定位方法包括模板匹配法、特征提取法、优化方法等。
这些方法通过对图像中的特征和模式进行分析和处理,可以在亚像素级别上对物体的位置进行定位,提高定位精度。
亚像素计算是一种对图像进行更加准确的计算和分析的方法。
常见的亚像素计算方法包括亚像素边缘检测、亚像素角点检测、亚像素轮廓提取等。
这些方法通过对图像中的局部信息进行更加精细的分析,可以获得更准确的计算结果和图像特征。
亚像素精度的方法在图像处理中发挥着重要的作用,能够提高图像处理结果的准确性和可靠性。
通过亚像素精度的方法,可以对图像进行更加细致的处理和分析,应用于诸如机器视觉、医学图像分析、遥感图像处理等领域,能够获得更高的图像质量和更准确的图像分析结果。
速度影像原理

速度影像原理速度影像是一种通过计算物体或者流体在不同时刻的位移来获得速度信息的技术。
在速度影像中,我们通过捕获连续的图像序列来观察物体在不同时间点的位置变化。
通过计算每个像素点在不同帧之间的位移,我们可以得到物体在空间中的速度分布图像。
为了实现速度影像,我们需要使用高速摄像机来捕捉高帧率的图像序列。
一般情况下,摄像机的帧率远高于人眼所能感知到的帧率,以确保捕捉到物体在短时间内的微小位移。
首先,我们需要对图像序列进行预处理,以消除摄像机自身的运动造成的影响。
这可以通过使用参考帧和非线性配准算法来实现。
参考帧是指图像序列中的一帧,我们将其他帧与该帧进行比较,从而得到每个像素点的位移。
然后,我们需要对序列中的每个像素点进行位移计算。
在速度影像中常用的计算方法有相关法和基于亚像素的光流法。
相关法通过计算两个图像之间的亮度相关性来得到位移信息。
而光流法则通过分析相邻帧之间的亮度变化来估计位移。
最后,我们可以将得到的位移信息转换为速度分布图像。
通过对位移场进行插值和滤波,我们可以得到平滑的速度图像。
这样,我们就可以观察到物体在特定时间段内的速度变化情况。
速度影像在许多领域有着广泛的应用。
例如,在流体力学中,我们可以通过速度影像来观察流体的运动变化,从而研究流体的流动性质。
在生物医学中,速度影像可以用于观察血液流动、心脏跳动等生物体内的运动情况。
综上所述,速度影像是一种通过计算位移来获得速度信息的技术。
通过观察物体在不同时刻的位置变化,我们可以获得物体在空间中的速度分布图像。
通过预处理、位移计算和转换,最终得到平滑的速度图像。
速度影像在许多领域有着广泛的应用,对于研究物体运动的行为和特性具有重要意义。
PIV亚像素匹配精度及粒子大小和浓度的影响
第39卷第1期2021年1月海洋科学进展A D V A N C E S I N MA R I N E S C I E N C EV o l .39 N o .1J a n u a r y,2021研究论文P I V 亚像素匹配精度及粒子大小和浓度的影响李 超1,2,3,蒋暑民1,2,3,马洪余1,2,3,戴德君1,2,3*,黄传江1,2,3(1.自然资源部第一海洋研究所,山东青岛266061;2.青岛海洋科学与技术试点国家实验室区域海洋动力学与数值模拟功能实验室,山东青岛266237;3.自然资源部海洋环境科学与数值模拟重点实验室,山东青岛266061)收稿日期:2019-09-21资助项目:国家重点研发计划项目 两洋一海 区域超高分辨率多圈层耦合短期数值预报系统研制(2017Y F C 1404000);中央级公益性科研院所基本科研业务费专项资金 束星北青年学者人才项目(2018S 03);国家自然科学基金项目 卷波破碎致湍流混合的实验室实验研究(41376036)作者简介:李 超(1993 ),男,硕士研究生,主要从事海洋关键过程科学实验与分析方面研究.E -m a i l :l i c a h o 1@f i o .o r g.c n *通信作者:戴德君(1973 ),男,博士,研究员,主要从事海洋内波与混合方面研究.E -m a i l :d j d a i @f i o .o r g.c n (李 燕 编辑)摘 要:利用计算机仿真粒子图像精确控制仿真粒子亚像素位移,讨论不同窗口下二次多项式曲面拟合法与基于梯度亚像素位移算法的匹配精度㊂针对粒子均匀移动的理想情况,发现二次多项式曲面拟合法的匹配精度随匹配窗口的增大而提高,而基于梯度亚像素位移算法的匹配精度几乎不随匹配窗口的增大而改变,两种算法匹配精度均在0.1个像素内㊂分析存在理想涡旋的粒子图像发现:二次多项式曲面拟合法的匹配精度约为0.2个像素,基于梯度亚像素位移算法的匹配精度约为0.05个像素㊂以二次多项式曲面拟合法为例,探讨了粒子大小和浓度对测量结果的影响,发现匹配窗口越大,最合适的粒子浓度范围就越大,这与不同匹配窗口包含的粒子图像灰度值信息量不同有关㊂在粒子大小方面,不同匹配窗口下,粒子直径为3个像素时误差均较小,表明P I V 实际使用时,选择大小为3个像素的粒子为宜㊂将2种亚像素匹配算法应用到水槽实验获取的P I V 影像分析中,均能得到较好的效果㊂关键词:亚像素匹配精度;二次多项式曲面拟合法;基于梯度的亚像素位移算法;仿真粒子直径与浓度中图分类号:O 35 文献标识码:A 文章编号:1671-6647(2021)01-0009-11d o i :10.3969/j.i s s n .1671-6647.2021.01.002引用格式:L IC ,J I A N GS M ,MA H Y ,e t a l .S u b p i x e l d i s p l a c e m e n tm a t c h i n g a c c u r a c y ofP I Va n d t h e e f f e c t s o f pa r t i c l e s i z e a n d c o n c e n t r a t i o n [J ].A d v a n c e i nM a r i n e S c i e n c e ,2021,39(1):9-19.李超,蒋暑民,马洪余,等.P I V 亚像素匹配精度及粒子大小和浓度的影响[J ].海洋科学进展,2021,39(1):9-19.激光粒子图像测速技术(P a r t i c l e I m a g eV e l o c i m e t r y,P I V )是采用高速C C D 相机㊁激光器等设备对流场进行成像,再通过对相邻两幅流场图像加以互相关分析获取测量区域的流速和流向的方法[1]㊂相较于传统的单点测量方法,P I V 技术具有多点同时测量㊁非接触测量㊁瞬时性和高分辨率等优点㊂因此,自20世纪80年代P I V 技术被A d r i a n 等学者提出以后迅速发展[2-5],并被应用在多个方面,如燃烧的火焰场㊁内燃机㊁微血管㊁飞机机翼复杂的外形流动以及火炮发射口流场测量等㊂在应用P I V 过程中,首先,需要向待测流场中均匀散播示踪粒子,这些粒子应具备如下特性:反光性良好㊁跟随性良好㊁不改变流体性质,各个示踪粒子之间互不影响等[6-8];然后,利用脉冲激光或连续激光片光源照亮待测量的流场区域,高速C C D 相机摄取激光面上的粒子分布,在极短的时间内记录粒子图像帧序列;最后,选定合适的窗口针对粒子图像序列进行互相关分析和亚像素算法分析,计算得出2帧图像中相对应的粒子位移的大小和方向,从而获得测量区域的瞬时速度场[9-10]㊂在这个过程中,图像匹配是整个测量过程中的关键技术之一,示踪粒子直径的大小和粒子的浓度对整个测量结果也起着至关重要的作用[11]㊂10 海 洋 科 学 进 展39卷相邻图像的相关分析或图像匹配是P I V 技术获取流场信息的关键,对原始图像的相关分析[12-13]通常分为2步:1)通过相关搜索匹配获得整像素位移,2)在整像素位移基础上进行亚像素的位移匹配㊂整像素位移很容易获得,但在实际流场中,所选匹配区域的位移值一般不会恰好为像素的整数倍,所以整像素的位移精度在实际应用中远远不够[14]㊂为了提高P I V 的测量精度,通常采取3种方法:1)提高高速C C D 相机的分辨率,但是由于当前相机技术限制,C C D 相机的分辨率有限,很多时候并不能满足需求;2)提高摄像系统的放大倍数,但放大倍数的增加意味着可测量面积的减小;3)采用亚像素位移匹配算法,亚像素位移算法在高精度P I V 测量中具有重要的意义[15-16]㊂本文比较了二次多项式曲面拟合法和基于梯度的亚像素位移匹配算法,给出2种算法的匹配精度和各自的特点,并进一步评估了匹配窗口的大小㊁示踪粒子的直径和粒子的浓度对测量精度的影响㊂相关结果对于合理使用P I V 技术开展实验和测量结果误差分析具有一定的参考价值㊂1 数据与方法1.1 计算机仿真粒子图像为了比较不同的亚像素定位算法精度且找到合适的粒子大小和粒子浓度,必须采用能够精确控制位移的粒子图像㊂本文采用Z h o u 和G o o d s o n [17]提出的算法,利用计算机产生随机分布的高斯光斑来模拟粒子的分布,并精确控制粒子的移动距离㊂仿真粒子图像的生成函数可表示为I 1(x ,y )=ðsk =1I 0e x p -(x -x k )2+(y -y k )2a 2éëêêùûúú,(1)I 2(x ,y )=ðsk =1I 0e x p -[x -(x k +әu )]2+[y -(y k +әv )]2a 2{},(2)式中:x ,y 为仿真粒子图像每个像素灰度值所对应的位置;I 1,I 2分别是原始仿真粒子图像和精确移动后的仿真粒子图像灰度值;әu ,әv 为原始图像仿真粒子移动的位移分量;s 为仿真粒子的数目;I 0为仿真粒子的中心光强;x k ,y k 为仿真粒子在原始图像中的中心位置;a 为仿真粒子的直径㊂利用式(1)㊁式(2)生成2幅仿真粒子图像,如图1所示:其中,仿真粒子图像大小为128像素ˑ128像素;仿真粒子数目为300个,中心光强为255,直径为4个像素㊂图1a 为原始仿真粒子图像,图1b 是在图1a 基础上所有粒子向右移动1.5个像素后的仿真图像,即әu =1.5且әv =0的情况㊂图1 仿真粒子图像F i g .1 P a r t i c l e i m a g e s s i m u l a t e db y c o m pu t e r 1.2 亚像素位移匹配算法1.2.1 互相关匹配算法获取整像素位移亚像素位移的获取首先通过互相关匹配获得整像素位移,然后再基于整像素匹配结果进行亚像素匹配㊂1期李 超,等:P I V 亚像素匹配精度及粒子大小和浓度的影响11互相关匹配需要2幅粒子图像,在前一时刻粒子图像中选取匹配窗口f (x ,y ),在后一时刻粒子图像中选取同样大小的匹配窗口g (i ,j )进行匹配,其中相关系数最大的窗口位置即可视为2帧照片的整像素位移量㊂本文整像素位移的获取采用W i l l e r t 和G h a r i b [18]在1991年提出的相关函数:R (i ,j )=ðmx =1ðny =1f (x ,y )㊃g (x +i ,y +j )ðmx =1ðny =1f (x ,y )㊃ðmx =1ðny =1g (x +i ,y +i ),(3)式中,R (i ,j )为相关系数;(x ,y )为前一时刻匹配窗口内灰度值对应位置坐标;i ,j 为后一时刻匹配窗口相对于前一时刻窗口的整像素移动位置,一般选择窗口大小为32像素ˑ32像素或64像素ˑ64像素;通过上述相关函数获取整像素位移之后,需要进一步通过亚像素位移匹配算法来提高测量精度㊂本文比较了曲面拟合法和基于梯度的亚像素位移算法㊂1.2.2 曲面拟合法实际计算中常用的曲面拟合法为二次多项式曲面拟合,拟合的参量为获取整像素位移时计算得到的相关系数㊂二次多项式曲面拟合法需要先选定拟合窗口,通常选取拟合窗口为3ˑ3,即根据整像素位移结果及其周围相近8个点的相关系数组成3ˑ3的相关系数矩阵,利用二次多项式拟合为连续曲面,找出此曲面的极值点所对应的位置即为最佳匹配结果㊂二次多项式的解析方程为C =k 1x 2+k 2y 2+k 3x +k 4y +k 5x y +k 6,(4)式中,C 为曲面拟合相关系数,(x ,y )为以整像素位移匹配结果为中心点建立坐标系中的坐标点,用最小二乘法求解待定系数k i ,进而可求得极大值点,该极大值点对应位置即曲面拟合法获得的亚像素精度的位移值㊂1.2.3 基于梯度的亚像素位移算法鉴于在P I V 测量过程中,粒子位移量不大,假设位移前后同一点的灰度值相同,则:f (x ,y )=g (x +әx +x 0,y +әy +y 0),(5)式中,f (x ,y )和g (x ,y )分别为前一时刻和后一时刻所对应的匹配窗口内的灰度值;әx ,әy 为整像素位移值;x 0和y 0为亚像素位移值㊂将式(5)进行一阶泰勒展开并舍去高阶小量,可得:f (x ,y )-g (x +әx ,y +әy )=x 0∂g (x +әx ,y +әy )∂x +y 0∂g (x +әx ,y +әy )∂y,(6)假设匹配窗口m ˑm 内各个像素点的位移都相等,就有m ˑm 个式(6),再利用最小二乘法可以推导出:x 0y 0éëêêùûúú=ðð(∂g ∂x )2ðð∂g ∂x ∂g ∂y ðð∂g ∂x ∂g ∂yðð(∂g ∂y )2éëêêêêêùûúúúúú-1㊃ðð(f -g )∂g ∂x ðð(f -g )∂g ∂y éëêêêêêùûúúúúú,(7)式中,∂g ∂x ,∂g ∂y 为后一时刻所对应匹配窗口的一阶灰度梯度㊂从式(7)中可以看出,求得亚像素位移值x 0,y 0的关键是计算出灰度梯度∂g ∂x 和∂g ∂y的值㊂本文采用计算结果比较精确和稳定的B a r r o n 算子计算灰度梯度,B a r r o n 算子[19]可以写为∂g (x ,y )∂x =112g (x -2,y )-812g (x -1,y )+812g (x +1,y )-112g (x +2,y )∂g (x ,y )∂y=112g (x ,y -2)-812g (x ,y -1)+812g (x ,y +1)-112g (x ,y +2)ìîíïïïï,(8)求得亚像素位移值x 0和y 0并结合整像素位移即可获得精度较高的位移值㊂12海洋科学进展39卷2结果与分析2.1曲面拟合法与基于梯度亚像素位移算法精度对比前文介绍了曲面拟合法和基于梯度亚像素位移算法,下面将对这2种亚像素算法的匹配精度和特征进行对比㊂首先针对粒子均匀移动的理想情况进行分析,所谓均匀移动指的是图像中的所有粒子移动大小和方向完全一致㊂利用的仿真粒子图像大小为128像素ˑ128像素,仿真粒子数目为1000个,仿真粒子直径为3个像素㊂图像互相关匹配时的匹配窗口大小为32像素ˑ32像素㊂图像互相关匹配前进行简单的滤波,并不会影响仿真粒子的直径大小㊂图2给出了二次多项式曲面拟合法与基于梯度亚像素位移算法的匹配精度及特征㊂注:图b,d中黑色线为平均位移误差,红色线为对应的标准差图2二次多项式曲面拟合法与基于梯度亚像素位移算法得到的亚像素匹配结果及误差对比F i g.2 S u b p i x e l d i s p l a c e m e n t s a n de r r o r sb y u s i n gq u a d r a t i c p o l y n o m i a l s u r f a c e f i t t i n g a n ds u b p i x e l d i s p l a c e m e n t a l g o r i t h mb a s e do n g r a yg r a d i e n t图2a和图2b为使用二次多项式曲面拟合法得到的结果,图2c和图2d为使用基于梯度的亚像素位移算法得到的结果㊂针对选定的真实位移量,通过选取不同的图像对和在前一时刻图像中选取不同窗口位置,在下一时刻图像中进行匹配,获得多个匹配结果,进而进行误差分析㊂图2为针对每个选定的真实位移量, 100次匹配实验结果:二次多项式曲面拟合法整像素位移时的误差较小,约为0.02个像素,而在非整像素位移时误差比较大(图2a),且平均误差值随着粒子真实位移的改变呈现出周期性的变化(图2b),但均在0.08个像素内;基于梯度亚像素位移算法在整像素时的误差为0,所有误差也在0.08个像素左右(图2c,图2d)㊂多次匹配实验结果的平均绝对误差分析(表1)可以看出:二次多项式曲面拟合法和基于梯度亚像素位移算法在相同匹配窗口时x方向和y方向的匹配精度差别不大㊂二次多项式曲面拟合法的计算精度随匹1期李 超,等:P I V 亚像素匹配精度及粒子大小和浓度的影响13配窗口的增大而提高,基于梯度亚像素位移算法在不同匹配窗口下的平均绝对误差大致相同㊂在匹配窗口为16像素ˑ16像素时,基于梯度亚像素位移算法的匹配精度要优于二次多项式曲面拟合法的匹配精度;匹配窗口为32像素ˑ32像素时,2种算法的匹配精度大致相同;匹配窗口为64像素ˑ64像素时,二次多项式曲面拟合法要优于基于梯度亚像素位移算法㊂表1 不同窗口大小下两种亚像素匹配平均绝对误差比较T a b l e 1 M e a na b s o l u t e e r r o r s o f s u b p i x e l d i s p l a c e m e n t sb y u s i n gq u a d r a t i c p o l y n o m i a l s u r f a c e f i t t i n g an d s u b p i x e l d i s p l a c e m e n t a l g o r i t h mb a s e do n g r a ygr a d i e n t f o r d i f f e r e n tw i n d o ws i z e s 窗口大小二次多项式曲面拟合法基于梯度亚像素位移算法x/像素y/像素x/像素y/像素16像素ˑ16像素0.06260.07630.02250.029032像素ˑ32像素0.02840.01790.02490.028464像素ˑ64像素0.00840.00720.02810.02722.2粒子浓度对测量结果的影响注:黑色线为平均位移误差,红色线为对应的标准差图3 亚像素匹配误差随仿真粒子浓度变化图(16像素ˑ16像素)F i g .3 V a r i a t i o no f s u b p i x e l d i s pl a c e m e n t e r r o r s w i t h p a r t i c l e c o n c e n t r a t i o n (16p i x e l s ˑ16p i x e l s)在P I V 测量流体过程中需要向流体中撒播示踪粒子,粒子浓度对P I V 的测量精度有着十分重要的影响㊂利用准确控制仿真粒子图像的位移和不断改变生成粒子的数目,可以找到合适的粒子浓度范围,对实际实验过程中的P I V 测量有一定的指导意义㊂图3给出了采用二次多项式曲面拟合法时不同粒子浓度对匹配精度的影响,采用的仿真粒子图像大小为128像素ˑ128像素,仿真粒子直径为3个像素,仿真粒子真实位移为向右和向上分别移动1.5个像素㊂选择合适的匹配窗口大小,通过选取不同的图像对和在前一时刻图像中选取不同窗口位置,在下一时刻图像中进行匹配,获得100个匹配结果,进而统计得到误差分析结果㊂图3给出了匹配窗口为16像素ˑ16像素时,匹配误差随仿真粒子浓度的变化,这里粒子浓度指仿真粒子个数与仿真粒子图像总像素值的比值㊂从图中可以看出:匹配窗口为16像素ˑ16像素时,粒子浓度0.04~0.36最为合适㊂改变匹配窗口大小后,最合适的仿真粒子浓度区间也发生改变,匹配窗口为32像素ˑ32像素时,最合适的粒子浓度区间为0.008~0.440,匹配窗口为64像素ˑ64像素时,最合适的粒子浓度区间为0.002~0.530㊂也就是说,匹配窗口越大,其包含的灰度值信息越多,最合适的粒子浓度范围也越大,建议在实际实验时,同时考虑所研究科学问题对流场空间分辨率的要求(匹配窗口的大小)和实验经济性,选择合适的粒子浓度㊂需要说明的是,这里所指的粒子浓度是仿真粒子个数与仿真粒子图像总像素值的比值㊂在利用计算机生成仿真图像时,设置了避免粒子重合的算法,但也只是保证仿真粒子中心位置不会重合,导致在生成的仿真图像中,会不可避免的产生粒子边缘重合现象㊂因而本文给出的结果对于实验中所14 海 洋 科 学 进 展39卷需的最低粒子浓度具有一定的指导意义㊂2.3 粒子直径对测量结果的影响P I V 是一种非接触式测量技术,粒子的选择对测量结果有比较大的影响,首先粒子的密度必须与所测量流体的密度接近,这样选取的示踪粒子才能具有较好的跟随性,能很好地反映流场信息,粒子直径大小对测量精度也有很大的影响㊂我们利用精确控制仿真粒子的大小并采用二次多项式曲面拟合法来分析测量误差的变化,进而确定适合的粒子大小㊂仿真粒子图像大小为128像素ˑ128像素,仿真粒子的数目为1000个,对应的粒子浓度为0.061,仿真粒子位移为向右和向上分别移动1.5个像素㊂通过选取不同的图像对和在前一时刻图像中选取不同窗口位置,在下一时刻图像中进行匹配,获得100个匹配结果,进而统计得到误差㊂注:黑色线为平均位移误差,红色线为对应的标准差图4 不同匹配窗口下亚像素匹配误差随粒子直径变化图F i g .4 V a r i a t i o no f s u b p i x e l d i s p l a c e m e n t e r r o r s w i t h p a r t i c l e d i a m e t e r f o r d i f f e r e n tw i n d o ws i z e s图4给出了不同匹配窗口下不同粒子直径时的误差大小㊂在匹配窗口为16像素ˑ16像素时,粒子直径为2个像素和3个像素时误差较小,其中粒子直径为3个像素时误差最小㊂当匹配窗口为32像素ˑ32像素时,粒子直径合适的范围为3~5个像素,在粒子直径为3个像素时误差最小,其误差值在0.02个像素内㊂当匹配窗口变为64像素ˑ64像素时,粒子直径合适的范围为3~6个像素,粒子直径在5个像素时匹配精度最佳,其中粒子直径为3,4,5个像素时的误差值在0.02个像素内㊂总之,随着匹配窗口的增大,粒子直径合适的范围也在扩大㊂从整体来看,在这3种匹配窗口下,粒子直径为3个像素时的匹配误差均可接受㊂一般来讲,粒子直径越小,其跟随性越好,尤其是在测量湍流流场条件下,对粒子的跟随性的要求更高㊂3 理想涡旋流场下的误差分析前文在亚像素匹配精度分析时均采用粒子均匀移动的图像,匹配窗口内部位移相同,其运动方式较为简单,而在P I V 的现实应用中很少会出现这种理想流动情况㊂因此,采用存在理想涡旋的粒子图像,分析其亚像素匹配误差更具有实际应用价值,下面对这种复杂的流场情况进行分析㊂仿真粒子图像大小为256像素ˑ256像素,仿真粒子数目为3500个,对应的粒子浓度为0.053,仿真粒子直径为3个像素,仿真粒子的位移采用线性增加的方法,即距离旋涡中心越远,粒子的位移越大且方向垂直于旋涡中心指向该点的矢量㊂粒子图像互相关匹配时的匹配窗口大小为16像素ˑ16像素,图5为二次多项式曲面拟合法与基于梯度亚像素位移算法得到的粒子影像及反演涡旋流场图,可以看出二者的差别不大,都能很好的表征涡旋的流场情况㊂图6给出了使用二次多项式曲面拟合法和基于梯度亚像素位移算法得到误差分析结果,由图6可见:使用基于梯度亚像素位移算法得到的误差比使用二次多项式曲面拟合法得到的误差要小,使用二次多项式曲1期李超,等:P I V亚像素匹配精度及粒子大小和浓度的影响15面拟合法的匹配误差基本稳定在0.2个像素以内,使用基于梯度亚像素位移算法得到的误差基本在0.05个像素以内㊂在粒子沿直线运动时,且匹配窗口为16像素ˑ16像素情况下,基于梯度亚像素位移算法匹配精度高于二次多项式曲面拟合法㊂在复杂的流动状态下,匹配窗口内部存在粒子的相对位移时,基于梯度亚像素位移算法的匹配精度也明显优于二次多项式曲面拟合法㊂图5二次多项式曲面拟合法与基于梯度亚像素位移算法得到的涡旋流场F i g.5 P a r t i c l e i m a g e a n d t h e v o r t e x f l o wf i e l do b t a i n e db y u s i n gq u a d r a t i c p o l y n o m i a l s u r f a c e f i t t i n g a n ds u b p i x e l d i s p l a c e m e n t a l g o r i t h mb a s e do n g r a yg r a d i e n t图6二次多项式曲面拟合法与基于梯度亚像素位移算法得到的误差对比F i g.6 E r r o r sb y u s i n gq u a d r a t i c p o l y n o m i a l s u r f a c e f i t t i n g a n d s u b p i x e l d i s p l a c e m e n ta l g o r i t h mb a s e do n g r a yg r a d i e n t f o r t h e i d e a l i z e dv o r t e x f l o w16 海 洋 科 学 进 展39卷4 P I V 在水槽实验中的应用2012年自然资源部第一海洋研究所建设了风-浪-流多功能实验水槽,水槽长45.0m ,宽1.0m ,高1.8m ,实验时水深一般设为1.2m ,为实现平稳出流,水槽两端各设增压腔一个㊂利用该水槽开展了波湍相互作用等实验研究㊂图7为风-浪-流多功能实验水槽玻璃段的示意图(玻璃段长32.4m ),造波机安装在水槽的首端,消波板安装在水槽尾部㊂在开展波-湍相互作用实验时,利用格栅振动产生湍流,采用P I V 和A D V(A c o u s t i cD o p p l e rV e l o c i m e t r y )测量水体速度,激光片光源平行于水槽,振动格栅位于测量区域的下方[20]㊂图7 风-浪-流多功能实验水槽玻璃段示意图F i g .7 S c h e m a t i c d i a gr a mo fw i n d -w a v e -f l o w m u l t i f u n c t i o n a l t a nk 图8 水槽格栅振动产生湍流实验P I V 粒子影像及反演流场F i g .8 P a r t i c l e i m a g e a n d t h e f l o wf i e l do f g r i d -ge n e r a t e d t u r b u l e n c e i nw a v e t a n k 图8给出的是格栅在水面以下26~31c m处上下振动(频率为3H z ,振幅为5c m )时垂直采样得到的P I V 影像㊂P I V 测量时,以激光脉冲作为光源,采用高速C C D 相机记录粒子图像,每两帧粒子图像之间的时间间隔为5m s ,采样频率为14.5H z ,即每两对粒子图像之间时间间隔为0.069s ,粒子图像分辨率为1192像素ˑ1600像素,对应的物理空间约为9.5c mˑ12.8c m ,P I V 影像的上端距水面约为4c m ㊂以其中一对粒子图像为例进行分析,对所选择的两帧粒子图像进行简单的滤波后识别出粒子直径的平均大小为2.96个像素,粒子直径不是整数,主要原因在于所用的示踪粒子在原始物理形态上就难以保证大小均匀,另外在利用图像识别粒子大小时,采用先识别每个粒子的面积,再假设每个粒子为圆形计算得出的粒子直径大小㊂P I V 影像中粒子个数约为10600个,对应粒子浓度为0.0056㊂互相关匹配窗口选取64像素ˑ64像素,利用二次多项式曲面拟合法和基于梯度亚像素位移算法进行亚像素匹配,结果如图8所示㊂2种算法反演得到的速度场除了个别点有差别之外,大部分区域都几乎一致㊂我们选取了格栅振动试验中测得的200对1期李超,等:P I V亚像素匹配精度及粒子大小和浓度的影响17连续的粒子图像,比较了2种算法所得速度场㊂图9给出了某一点(距水面14.720c m,距测量区域左侧4.576c m)2种亚像素算法所得速度的对比图,u为水平方向流速,v为垂直方向流速㊂互相关匹配窗口为64像素ˑ64像素,两种亚像素算法所得流速变化趋势与量值基本一致,在使用合适的粒子大小和浓度时,2种亚像素算法均能得到较好的结果㊂图9二次多项式曲面拟合法与基于梯度亚像素位移算法得到的速度对比F i g.9 C o m p a r i s o n s o f v e l o c i t i e s o b t a i n e db y u s i n gq u a d r a t i c p o l y n o m i a l s u r f a c e f i t t i n g a n ds u b p i x e l d i s p l a c e m e n t a l g o r i t h mb a s e do n g r a yg r a d i e n t5结论本研究利用计算机仿真P I V粒子图像,通过精确控制粒子位移,讨论了不同匹配窗口下二次多项式曲面拟合法与基于梯度亚像素位移算法的匹配精度;进一步讨论了粒子浓度和直径大小对P I V测量结果的影响,给出了合适的粒子浓度范围和最佳的粒子直径大小;进而分析了理想旋涡流场下2种亚像素算法的误差,最后将2种算法应用到实际水槽实验P I V影像分析中㊂具体结论如下:1)比较了二次多项式曲面拟合法与基于梯度亚像素位移算法2种方法,给出了不同窗口下二者的匹配精度㊂针对粒子均匀移动的理想情况,在相同匹配窗口时,x方向和y方向的匹配精度差别不大㊂二次多项式曲面拟合法匹配精度随着匹配窗口的增大而提高,基于梯度亚像素位移算法匹配精度几乎不随窗口变化,但两种亚像素算法的匹配精度均在0.1个像素内㊂2)匹配窗口为16像素ˑ16像素时,最合适的粒子浓度区间为0.040~0.360;匹配窗口为32像素ˑ32像素时,最合适的粒子浓度区间为0.008~0.440;匹配窗口为64像素ˑ64像素时,最合适的粒子浓度区间为0.002~0.530㊂匹配窗口越大,最合适的粒子浓度范围越大㊂在不同的匹配窗口下,粒子直径为3个像素时的误差均较小,为保证粒子跟随性,建议在P I V实际使用过程中,选择直径为3个像素的粒子为宜㊂3)针对理想旋涡的粒子图像,利用基于梯度亚像素位移算法得到的误差比利用二次多项式曲面拟合法得到的误差要小,二次多项式曲面拟合法的匹配误差基本稳定在0.2个像素内,而基于梯度亚像素位移算法18海洋科学进展39卷得到的误差基本在0.05个像素以内㊂参考文献(R e f e r e n c e s):[1] A D R I A N RJ.T w e n t yy e a r s o f p a r t i c l e i m a g e v e l o c i m e t r y[J].E x p e r i m e n t s i nF l u i d s,2005,39(2):159-169.[2] C U IH.R e s e a r c ho n2DP I Vo f l i q u i d[D].D a l i a n:D a l i a nU n i v e r s i t y o fT e c h n o l o g y,2006.崔恒.流体二维图像测速技术的研究[D].大连:大连理工大学,2006.[3] T A N G Q,S H E NGX.P r o g r e s s i nw h o l e f i e l dm e a s u r i n g t e c h n i q u e s f o r f l u i d v e l o c i t y[J].A d v a n c e s i nM e c h a n i c s,1997,27(1):106-121.康琦,申功炘.全场测速技术进展[J].力学进展,1997,27(1):106-121.[4] L I N D K E N R,R O S S I M,G R O S S E S,e ta l.M i c r o-p a r t i c l e i m a g ev e l o c i m e t r y(m i c r o P I V):r e c e n td e v e l o p m e n t s,a p p l i c a t i o n s,a n dg u i d e l i n e s[J].L a bo naC h i p,2009,9(17):2551-2618.[5] A D R I A N RJ.S c a t t e r i n gp a r t i c l e c h a r a c t e r i s t i c s a n d t h e i r e f f e c t o n p u l s e d l a s e rm e a s u r e m e n t s o f f l u i d f l o w:s p e c k l e v e l o c i m e t r y v s p a r t i-c l e i m a g e v e l o c i m e t r y[J].A p p l i e dO p t i c s,1984,23(11):1690-1691.[6] S C A R A N OF,O U D H E U S D E NB W V.P l a n a r v e l o c i t y m e a s u r e m e n t s o f a t w o-d i m e n s i o n a l c o m p r e s s i b l ew a k e[J].E x p e r i m e n t s i nF l u-i d s,2003,34(3):430-441.[7] Y A NJ,Y A N G XL,D E N G W Q,e t a l.A n a l y s i s o n f o l l o w i n g o f t r a c e r p a r t i c l e s[J].T r a n s a c t i o n s o f t h eC h i n e s e S o c i e t y o fA g r i c u l t u r a lM a c h i n e r y,2005,36(6):54-56.严敬,杨小林,邓万权,等.示踪粒子跟随性讨论[J].农业机械学报,2005,36(6):54-56.[8] M I R S E P A S S IA,R A N K I N DD.P a r t i c l e i m a g e v e l o c i m e t r y i nv i s c o e l a s t i c f l u i d s a n d p a r t i c l e i n t e r a c t i o n e f f e c t s[J].E x p e r i m e n t s i nF l u-i d s,2014,55(1):1-7.[9] L O N G XJ.P a r t i c l e i m a g e v e l o c i m e t r y i n v e s t i g a t i o nw a v e i n f l u m e[D].T i a n j i n:T i a n j i nU n i v e r s i t y,2009.龙晓警.粒子图像测速(P I V)技术在水槽波浪中的研究[D].天津:天津大学,2009.[10] M E L L I N G A.T r a c e r p a r t i c l e sa n ds e e d i n g f o r p a r t i c l e i m a g ev e l o c i m e t r y[J].M e a s u r e m e n tS c i e n c ea n d T e c h n o l o g y,1997,8(12):1406-1416.[11] L U YJ,D O N GSP.A p a r t i c l e i m a g e v e l o c e m e n t r y s y s t e mf o r t w od i m e n s i o n a lm e a s u r e m e n t[J].J o u r n a l o fE x p e r i m e n t a lM e c h a n i c s,2001,16(3):338-346.陆耀军,董守平.二维粒子图像测速系统的研制[J].实验力学,2001,16(3):338-346.[12] P E T E R S W H.D i g i t a l i m a g i n g t e c h n i q u e i ne x p e r i m e n t a l s t r e s s a n a l y s i s[J].O p t i c a l E n g i n e e r i n g,1982,21(3):427-431.[13]S U T T O N M A,M C N E I LSR,H E L MJD,e t a l.A d v a n c e s i nt w o-d i m e n s i o n a l a n dt h r e e-d i m e n s i o n a l c o m p u t e rv i s i o n[J].T o p i c s i nA p p l i e dP h y s i c s,2000,77(1):323-372.[14] P A NB,X I E H M,X U BQ,e t a l.D e v e l o p m e n t o f s u b p i x e l d i s p l a c e m e n t s r e g i s t r a t i o na l g o r i t h m s i nd i g i t a l i m a g e c o r r e l a t i o n[J].A d-v a n c e s i n M e c h a n i c s,2005,35(3):345-352.潘兵,谢惠民,续伯钦,等.数字图像相关中的亚像素位移定位算法进展[J].力学进展, 2005,35(3):345-352.[15]S T A N I S L A S M,O K AMO T O K,KÄH L E R CJ.M a i n r e s u l t s o f t h e f i r s t i n t e r n a t i o n a l P I Vc h a l l e n g e[J].J o u r n a l o f I n f e c t i o u sD i s e a s e s,2003,123(3):297-300.[16]S T A N I S L A S M,O K AMO T O K,KÄH L E RCJ,e t a l.M a i n r e s u l t s o f t h e s e c o n d i n t e r n a t i o n a l P I Vc h a l l e n g e[J].E x p e r i m e n t s i nF l u-i d s,2005,39(2):170-191.[17] Z HO U P,G O O D S O N K E.S u b p i x e ld i s p l a c e m e n ta n dd e f o r m a t i o n g r a d i e n t m e a s u r e m e n tu s i n g d i g i t a l i m a g e/s p e c k l ec o r r e l a t i o n(D I S C)[J].O p t i c a l E n g i n e e r i n g,2001,40(8):1613-1620.[18] W I L L E R TCE,G H A R I B M.D i g i t a l p a r t i c l e i m g e v e l o c i m e t r y[J].E x p e r i m e n t s i nF l u i d s,1991,10(4):181-193.[19] H O R E NBKP,S C HU N C KBG.D e t e r m i n i n g o p t i c a l f l o w[J].A r t i f i c i a l I n t e l l i g e n c e,1980,17(1-3):185-203.[20] MA H Y,D A IDJ,Q I A OFL,e t a l.A ne x p e r i m e n t a l s t u d y o nc h a r a c t e r i s t i c so f t u r b u l e n c e g e n e r a t e db y o s c i l l a t i n gg r i d s i naw a v et a n k[J].H a i y a n g X u e b a o,2017,39(12):12-19.马洪余,戴德君,乔方利,等.波浪水槽中振动格栅湍流特征的实验研究[J].海洋学报,2017,39(12):12-19.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高速摄影测量学的原理非常简单,但要求有较高的精度时,却困难重重。
显而易见,光心到像面的距离,即焦距与实物距离相比可相差成千上万倍。
即摄影系统参数及像面特征点位置的任何误差都可能被放大成千上万倍。
真可谓“失之毫厘,差之千里”。
早期测量结果,例如用测角器测量摄影系统的角度,可使其测量结果失去意义。
利用数字图像处理技术来提高摄影系统对图像提取的精度,具有非常重要的意义,是整个精密摄影测量的关键。
图像系统的像素点数决定了该图像的空间分辨率,要提高分辨率,需要提高系统的像素点数,例如从512×512提高到1024×1024甚至到2048×2048,但是这种提高硬件像素点的成本代价是非常昂贵的,常令人难以接受。
近年来许多学者提出来用软件的方法,提高图像的空间分辨率,即亚像素精度技术。
利用这种技术,可将图像空间处理分辨率提高十倍甚至百倍,从而大大地提高了图像处理精度。
当要提取的特征对象在图像上不是一个孤立的像素点,而是具有一个小区域时,利用特征对象各点之间是有一定的联系,具有一定特征的前提,对该特征对象各点的灰度进行插值或拟合,或求对象的轮廓的形心,或求对象的灰度重心。
对这种过程做浮点计算,就可以达到亚像素精度。
通常,可达到0.2~0.5个亚像素精度。
数字图像是对原始的模拟信号图像进行遵循某种规范的抽样而得到的。
通常的分析仅利用了抽样点信息,如亮点、暗点、亮暗交替的边缘点等,对于抽样点之间的信息却无法利用。
因此一般认为数字图像处理系统的分辨率和精确度非常高为一个像素。
当然,由于抽样间隔(像素宽)决定了系统空间分辨率,数字图像的分辨率非常高只能达到一个像素。
可是定位精度和分辨率不是一回事,由于目标特征变化的连续性,可以借助某些数学工具———即亚像素处理方法,实现用抽样点信息来表达非抽样点信息,因此定位精度有可能高于像素单位。
若已知对象的特征分布,取典型的特征分布为一模板,用此模板对搜索区域做相关滤波,然后对相关系数做拟合,然后求出相关系数的值点,即为特征对象的位置。
此方法可达到0.01~0.1个亚像素精度。
利用一个与待测目标灰度分布相近的算子,对目标点附近图像进行相关滤
波,并对运算结果作二次曲面拟合,以该曲面的极值点作为目标点。
相关滤波处理能够有效地突出目标特征点。
例如,图(a)、(b)所示的十字丝目标相当模糊,而经过图(C)的十字丝模板相关滤波后,可形成明显的十字丝中心特征点图(d)。
图(a)图(b)
图(C)十字丝的相关滤波图(d)经滤波的十字丝中心特征点。