汽车理论习题Matlab程序
汽车理论课后题matlab程序
n=600:1:4000; r=; i0=; eff=; f=;m=3880; g=; G=m*g; CdA=; a=; hg=; L=;Iw1=; Iw2=; Iw=Iw1+Iw2; If=;Ttq=+*n/*(n/1000).^2+*(n/1000).^*(n/1000).^4;%驱动力行驶阻力平衡图for ig=[,,,,]Ua=*r*n/ig/i0;Ft=Ttq*ig*i0*eff/r;plot(Ua,Ft);hold on;endFf=G*f;ua=0::max(Ua);Fw=CdA*ua.^2/;plot(ua,(Ff+Fw)); title('驱动力-行驶阻力平衡图');xlabel('Ua/(km/h)');ylabel('Ft/N');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw') [x,y]=ginput(1); disp('汽车的最高车速');disp(x);disp('km/h');%最大爬坡度及最大爬坡度时的附着率Ua=*r*n/i0;Ft=Ttq**i0*eff/r;Fw=CdA*Ua.^2/;i=tan(asin((Ft-(Ff+Fw))/G));disp('汽车的最大爬坡度');disp(max(i));C=max(i)/(a/L+hg/L*max(i));disp('克服最大爬坡度时的附着率');disp(C);%加速度倒数曲线figure;for ig=[,,,,]Ua=*r*n/ig/i0;q=1+Iw/(m*r^2)+If*ig^2*i0^2*eff/(m*r^2);Ft=Ttq*ig*i0*eff/r;Fw=CdA*Ua.^2/;as=(Ft-(Ff+Fw))/q/m;plot(Ua,1./as);hold on;endaxis([0 98 0 10]);title('行驶加速度倒数曲线');xlabel('Ua/(km/h)');ylabel('1/a');gtext('1/a1'),gtext('1/a2'),gtext('1/a3'),gtext('1/a4'),gtext('1/a5'); %加速时间曲线u(1)=*r*600/i0/;dt=;w=1;t(1)=0;ig=;while(u(w)<n(w)=u(w)*ig*i0/r;Ttq(w)=+*n(w)/*(n(w)/1000)^2+*(n(w)/1000)^*(n(w)/1000)^4;Ft(w)=Ttq(w)*ig*i0*eff/r;Ff=G*f;Fw(w)=CdA*u(w)^2/;q=1+Iw/(m*r^2)+If*ig^2*i0^2*eff/(m*r^2);a(w)=*(Ft(w)-(Ff+Fw(w)))/q/m;u(w+1)=u(w)+a(w)*dt;if(u(w+1)>=*4000*r/i0)ig=;endif(u(w+1)>=*4000*r/i0) ig=; endif(u(w+1)>=*4000*r/i0) ig=; endt(w+1)=(w+1)*dt; w=w+1; endfigure;plot(t,u);axis([0 60 0 100]);title('2挡原地起步加速时间曲线');xlabel('时间t/s'),ylabel('车速u/(km/h)');[x1,y1]=ginput(1);disp('加速到70km/h 的时间');disp(x1);0204060801001202000400060008000100001200014000驱动力-行驶阻力平衡图Ua/(km/h)F t /N102030405060708090012345678910行驶加速度倒数曲线Ua/(km/h)1/a10203040506001020304050607080901002挡原地起步加速时间曲线时间t/s车速u /(k m /h)Iw1=; Iw2=; Iw=Iw1+Iw2; If=; m=1600; g=;G=m*g; Ttqmax=140; i1=; i0=; eff=; r=; hg=; b=; L=; q=1+Iw/(m*r^2)+If*i1^2*i0^2*eff/(m*r^2); Ft=Ttqmax*i1*i0*eff/r;a=Ft/q/m;q=a/g;C1=q/(b/L-hg/L*q);if(C1>disp('发动机转矩不能充分发挥');elsedisp('发动机转矩能够充分发挥');endb=(q/+hg/L*q)*L;disp('调整后的b值');disp(b);disp('调整后的前轴负荷率'),disp(b/L);Iw=; If=; m=2152; g=; r=; eff=; i4=1; i0=;amax=; Ua=50/; CdA=;q=1+Iw/(m*r^2);f=q*g;disp('汽车在该路面上的滚动阻力系数');disp(f);q=1+Iw/(m*r^2)+If*i4^2*i0^2*eff/(m*r^2);D4max=f+q*amax/g;disp('最大动力因数');disp(D4max);Fw=CdA*Ua^2/;D1max=(D4max*G+Fw)*i1/i4/G;imax=tan(asin((D1max-f*sqrt(1-D1max^2+f^2))/(1+f^2))); disp('最大爬坡度'),disp(imax);n=600:1:4000; r=; i0=; eff=; f=;CdA=;m=3880; g=; G=m*g;Ttq=+*n/*(n/1000).^2+*(n/1000).^*(n/1000).^4;for ig=[,,,,]Ua=*r*n/ig/i0;Pe=Ttq.*n/9550;plot(Ua,Pe);hold on;endUa=0::max(Ua);Pf=G*f*Ua/3600;Pw=CdA*Ua.^3/76140;plot(Ua,(Pf+Pw)/eff);title('汽车的功率平衡图'),xlabel('Ua/(km/h)'),ylabel('P/kw');%等速百公里燃油消耗n1=[815,1207,1614,2012,2603,3006,3403,3804];b0=[,,,,,,,];b1=[,,,,,,,] ;b2=[,,,,,,,];b3=[,,,,,,,];b4=[,,,,,,,];B0=spline(n1,b0,n); B1=spline(n1,b1,n); B2=spline(n1,b2,n); B3=spline(n1,b3,n); B4=spline(n1,b4,n);deng=7;figure;for ig=[,]Ua=*r*n/ig/i0;Pf=G*f*Ua/3600;Pw=CdA*Ua.^3/76140;P=(Pf+Pw)/eff;b=B0+B1.*P+B2.*P.^2+B3.*P.^3+B4.*P.^4; Q=P.*b./*Ua*deng); plot(Ua,Q); hold on; endaxis([0 100 12 28]);title('最高挡与次高挡等速百公里油耗曲线'),xlabel('Ua/(km/h)'),ylabel('百公里油耗Qs/(L/100km)');204060801001200102030405060708090100汽车的功率平衡图Ua/(km/h)P /k w020406080100121416182022242628最高挡与次高挡等速百公里油耗曲线Ua/(km/h)百公里油耗Q s /(L /100k m )beta=; L=; a1=; b1=L-a1; hg1=; a2=; b2=L-a2; hg2=;g=; z=0::1;faif1=beta*z./(1/L*(b1+z*hg1)); fair1=(1-beta)*z./(1/L*(a1-z*hg1)); faif2=beta*z./(1/L*(b2+z*hg2)); fair2=(1-beta)*z./(1/L*(a2-z*hg2));plot(z,faif1,'r',z,fair1,'g',z,faif2,'b',z,fair2,'k'); fai=0::1;Ef1=(b1/L)./(beta-fai*hg1/L); Er1=(a1/L)./((1-beta)+fai*hg1/L); Ef2=(b2/L)./(beta-fai*hg2/L); Er2=(a2/L)./((1-beta)+fai*hg2/L); figure;plot(fai,Ef1,'r',fai,Er1,'g',fai,Ef2,'b',fai,Er2,'k');axis([0 1 0 1]);fai=;Er1=(a1/L)/((1-beta)+fai*hg1/L);Er2=(a2/L)/((1-beta)+fai*hg2/L);abmax1=fai*Er1*g;abmax2=fai*Er2*g;t21=; t22=; u0=30;s1=1/*(t21+t22/2)*u0+u0^2/abmax1;s2=1/*(t21+t22/2)*u0+u0^2/abmax2;disp('空载时的制动距离'),disp(s1);disp('满载时的制动距离'),disp(s2);%前部管路损坏时制动距离z1=a1*fai/(L+fai*hg1); z2=a2*fai/(L+fai*hg2); abmax1=z1*g; abmax2=z2*g;s1=1/*(t21+t22/2)*u0+u0^2/abmax1;s2=1/*(t21+t22/2)*u0+u0^2/abmax2;disp('前部管路损坏时空载制动距离');disp(s1); disp('前部管路损坏时满载制动距离');disp(s2); %后部管路损坏时的制动距离z1=b1*fai/(L-fai*hg1);z2=b2*fai/(L-fai*hg2); abmax1=z1*g; abmax2=z2*g;s1=1/*(t21+t22/2)*u0+u0^2/abmax1;s2=1/*(t21+t22/2)*u0+u0^2/abmax2;disp('后部管路损坏时空载制动距离');disp(s1); disp('后部管路损坏时满载制动距离');disp(s2);hg=; b=; L=; beta=; fai=; g=;fai0=(L*beta-b)/hg;if(fai<fai0)disp('前轮先抱死,制动效率为'); E=(b/L)/(beta-fai*hg/L);elsedisp('后轮先抱死,制动效率为'); E=(a/L)/((1-beta)+fai*hg/L);enddisp('最大制动减速度'),disp(E*fai*g);disp('a)、b)、c)的双回路制动系统制动系增益都为G');disp('1回路失效时,a)、b)、c)的制动系增益分别为,,');disp('1回路失效时,a)、b)、c)的制动系增益分别为,,');disp('a)中1回路失效时最大制动强度');zmax1=a*fai/(L+fai*hg)disp('a)中1回路失效时制动效率');disp(zmax1/fai)disp('a)中1回路失效时最大制动减速度');abmax1=zmax1*gdisp('a)中2回路失效时最大制动强度');zmax2=a*fai/(L+fai*hg)disp('a)中1回路失效时制动效率');disp(zmax1/fai)disp('a)中2回路失效时最大制动减速度');abmax2=zmax2*gdisp('b)或c)中1或2回路失效时最大制动强度');z=fai*b/(2*L*beta-fai*hg)disp('b)或c)中1或2回路失效时最大制动减速度');abmax=z*gdisp('b)或c)中1或2回路失效时制动效率');disp(z/fai)disp('双回路系统a制动系增益最大,一个回路失效时的最大制动减速度也比b、c大,所以其性能较优')disp('b和c制动系增益相同,两者在一个回路失效时的制动效率相同。
汽车理论课后作业matlab编程详解(带注释)

汽车理论课后作业matlab编程详解(带注释)1.3matlab程序:(1)%驱动⼒-⾏驶阻⼒平衡图%货车相关参数。
m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.000.793];y=0.85;r=0.367;f=0.013;CdA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;n=600:10:4000;%发动机转数转换成汽车⾏驶速度。
ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;%计算各档位驱动⼒。
Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.84 45*(n/1000).^4;Ft1=Tq*ig(1)*i0*y/r;Ft2=Tq*ig(2)*i0*y/r;Ft3=Tq*ig(3)*i0*y/r;Ft4=Tq*ig(4)*i0*y/r;Ft5=Tq*ig(5)*i0*y/r;%计算⾏驶阻⼒。
Fz1=m*g*f+2.77*ua1.^2/21.15;Fz2=m*g*f+2.77*ua2.^2/21.15;Fz3=m*g*f+2.77*ua3.^2/21.15;Fz4=m*g*f+2.77*ua4.^2/21.15;Fz5=m*g*f+2.77*ua5.^2/21.15;%驱动⼒-⾏驶阻⼒平衡图。
title('驱动⼒-⾏驶阻⼒平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');legend('Ft1','Ft2','Ft3','Ft4','Ft5','Ff+Fw')%求最⾼车速。
汽车理论习题答案及MATLAB编程
汽车理论课后习题答案(部分题目)教材:汽车理论(第5版)清华大学余志生主编机械工业出版社出版本文档包含习题答案:第一章:1.1 1.2 1.7 1.8第二章:2.2 2.3 2.4第三章第四章:4.1 4.2 4.3 4.5第五章:5.1 5.8 5.10 5.11 5.12 5.14 5.17第六章:6.1~6.5其中第三章 4.3 5.11 6.2 6.4 6.5所要求的MATLAB编程见本作者另一百度文库文档。
获取方法:点击左上角本作者的昵称,进入本作者的文库,《汽车理论课后习题答案—附MATLAB编程》第三章:解:(完整解题含MATLAB编程见另一文件)根据“货车最高车速为100km/h左右”,为满足五种主减速器与两种变速器匹配后车速均能达到100km/h,参照表中发动机转速,可选3006r/min、3403r/min、3804r/min三种。
结合万有特性图,考虑到动力性与燃油经济性的统一,选择转速3403r/min进行计算。
由于本人能力有限,暂难以完成EPA循环工况下的燃油消耗量计算,故以“货车采用最高档、90%负荷率工况下”的等速百公里油耗代替表示燃油经济性。
取汽油密度为0.7kg/L。
燃油经济性以等速百公里油耗Qs(L/100km)表示;动力性以2挡起步加速行驶至96.6km/h车速所用时间t(s)表示。
下面运用MATLAB编程实现计算和绘图,编程(m文件)列于最后,运行结果(4挡)如下:t=48.4235t=46.3511t=41.5557t=33.3796t=30.556490%负荷Pe=55.5647Qs4=25.103126.365628.307829.958730.7356图1加速度倒数-速度曲线图2燃油经济性-加速时间曲线由此可得出:主减速器传动比越大,动力性越好,燃油经济性越差。
与4挡变速器相比,采用5挡变速器时动力性和燃油经济性有所提高和改善。
(完整解题含MATLAB 编程见另一文件)图1图25.8某种汽车的质心位置、轴距和前后轮胎的型号已定。
汽车理论课后习题MATLAB编程-武汉理工版
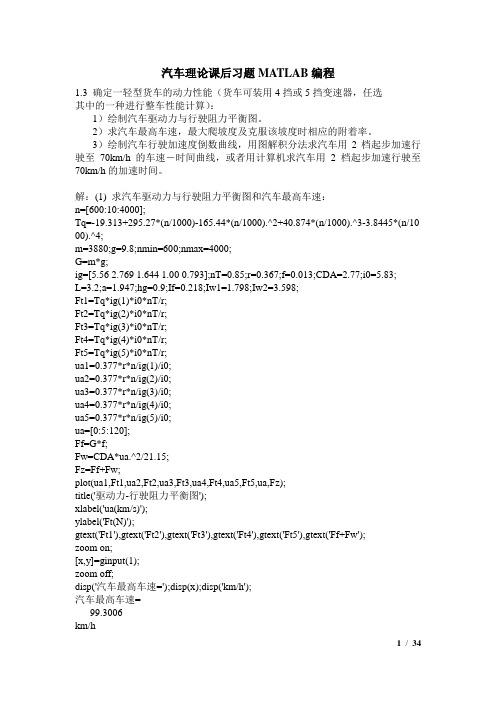
汽车理论课后习题MATLAB编程1.3 确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间。
解:(1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua.^2/21.15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw');zoom on;[x,y]=ginput(1);zoom off;disp('汽车最高车速=');disp(x);disp('km/h');汽车最高车速=99.3006km/h(2)求汽车最大爬坡度程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;Ff=G*f;Fw1=CDA*ua1.^2/21.15;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100*tan(asin(max(Fi1/G)));disp('汽车最大爬坡度=');disp(imax);disp('%');汽车最大爬坡度=35.2197%(3)求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Fw1=CDA*ua1.^2/21.15;Fw2=CDA*ua2.^2/21.15;Fw3=CDA*ua3.^2/21.15;Fw4=CDA*ua4.^2/21.15;Fw5=CDA*ua5.^2/21.15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*r^2)+(If*ig(1)^2*i0^2*nT)/(m*r^2);deta2=1+(Iw1+Iw2)/(m*r^2)+(If*ig(2)^2*i0^2*nT)/(m*r^2);deta3=1+(Iw1+Iw2)/(m*r^2)+(If*ig(3)^2*i0^2*nT)/(m*r^2);deta4=1+(Iw1+Iw2)/(m*r^2)+(If*ig(4)^2*i0^2*nT)/(m*r^2);deta5=1+(Iw1+Iw2)/(m*r^2)+(If*ig(5)^2*i0^2*nT)/(m*r^2);a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([0 99 0 10]);title('汽车的加速度倒数曲线');xlabel('ua(km/h)');ylabel('1/a');gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5');a=max(a1);af=asin(max(Ft1-Ff-Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp('假设后轮驱动,最大爬坡度相应的附着率=');disp(C);假设后轮驱动,最大爬坡度相应的附着率=0.4219(4) >>clearnT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8;G=m*g; ig=[5.56 2.769 1.644 1.00 0.793];nmin=600;nmax=4000;u1=0.377*r*nmin./ig/i0;u2=0.377*r*nmax./ig/i0;deta=0*ig;for i=1:5deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nT)/(m*r^2);endua=[6:0.01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(ig(4)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(ig(5)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([0 80 0 100]);title('汽车2档原地起步换挡加速时间曲线');xlabel('时间t(s)');ylabel('速度ua(km/h)');>> ginputans =25.8223 70.073725.7467 70.0737所以汽车2档原地起步换挡加速行驶至70km/h的加速时间约为25.8s2.7已知货车装用汽油发动机的负荷特性与万有特性。
汽车理论习题-matlab
《汽车理论》习题一、确定一轻型货车的动力性能。
1)绘制汽车驱动力与行驶阻力平衡图;2)求汽车最高车速与最大爬坡度;3)绘制汽车行驶加速度倒数曲线;用计算机求汽车用Ⅱ档起步加速行驶至70km/h所需的加速时间。
已知数据略。
(参见《汽车理论》习题第一章第3题)解题程序如下:用Matlab语言m1=2000; m2=1800; mz=3880;g=9.81; r=0.367; CdA=2.77; f=0.013; nT=0.85;ig=[5.56 2.769 1.644 1.00 0.793]; i0=5.83;If=0.218; Iw1=1.798; Iw2=3.598; #输入已知参数Iw=2*Iw1+4*Iw2;for i=1:69n(i)=(i+11)*50;Ttq(i)=-19.313+295.27*(n(i)/1000)-165.44*(n(i)/1000)^2+40.874*(n(i)/1000)^3-3.8445*(n(i)/1000)^4;end #从600~4000rpm油拟合公式计算发动机转距for j=1:5for i=1:69Ft(i,j)=Ttq(i)*ig(j)*i0*nT/r;ua(i,j)=0.377*r*n(i)/(ig(j)*i0);Fz(i,j)=CdA*ua(i,j)^2/21.15+mz*g*f;endend #计算各档位下的驱动力和行驶阻力plot(ua,Ft,ua,Fz)title('汽车驱动力与行驶阻力平衡图');xlabel('ua(km/h)');ylabel('Ft(N)'); #作汽车驱动力与行驶阻力平衡图for k=1:175n1(k)=3300+k*0.1;Ttq(k)=-19.313+295.27*(n1(k)/1000)-165.44*(n1(k)/1000)^2+40.874*(n1(k)/1000)^33.8445*(n1(k)/1000)^4;Ft(k)=Ttq(k)*ig(5)*i0*nT/r;ua(k)=0.377*r*n1(k)/(ig(5)*i0);Fz(k)=CdA*ua(k)^2/21.15+mz*g*f;E(k)=abs((Ft(k)-Fz(k)));end #从3300rpm开始以0.1rpm为步长搜索直到找到for k=1:175 #驱动力与行驶阻力之差绝对值最小点(Ⅴ档处)if(E(k)==min(E)) #通过其他检验程序可估计出该点大致位置(3310rpm附近)disp('汽车最高车速=');disp(ua(k));disp('km/h');end #输出结果endfor p=1:150 #从2000rpm开始以0.5为步长搜索找驱动力n2(p)=2000+p*0.5; #与行驶阻力之差最大点(Ⅰ档处)Ttq(p)=-19.313+295.27*(n2(p)/1000)-165.44*(n2(p)/1000)^2+40.874*(n2(p)/1000) ^3-3.8445*(n2(p)/1000)^4;Ft(p)=Ttq(p)*ig(1)*i0*nT/r;ua(p)=0.377*r*n2(p)/(ig(1)*i0);Fz(p)=CdA*ua(p)^2/21.15+mz*g*f;af(p)=asin((Ft(p)-Fz(p))/(mz*g));end #通过其他检验程序可估计出该点大致位置(2000rpm附近)for p=1:150if(af(p)==max(af))i=tan(af(p));disp('汽车最大爬坡度=');disp(i);endendfor i=1:69 #开始计算绘制加速度倒数曲线所需数据n(i)=(i+11)*50;Ttq(i)=-19.313+295.27*(n(i)/1000)-165.44*(n(i)/1000)^2+40.874*(n(i)/1000)^3-3.8445*(n(i)/1000)^4;endfor j=1:5for i=1:69deta=1+Iw/(mz*r^2)+If*ig(j)^2*i0^2*nT/(mz*r^2);ua(i,j)=0.377*r*n(i)/(ig(j)*i0);a(i,j)=(Ttq(i)*ig(j)*i0*nT/r-CdA*ua(i,j)^2/21.15-mz*g*f)/(deta*mz);if(a(i,j)<=0)a(i,j)=a(i-1,j);endif(a(i,j)>0.05) #剔除加速度值小于0.05的数据b1(i,j)=a(i,j);u1(i,j)=ua(i,j);elseb1(i,j)=a(i-1,j);u1(i,j)=ua(i-1,j);endb(i,j)=1/b1(i,j);endendx1=u1(:,1);y1=b(:,1);x2=u1(:,2);y2=b(:,2);x3=u1(:,3);y3=b(:,3);x4=u1(:,4);y4=b(:,4);x5=u1(:,5);y5=b(:,5);plot(x1,y1,x2,y2,x3,y3,x4,y4,x5,y5);title('加速度倒数曲线');axis([0 120 0 30]);xlabel('ua(km/h)');ylabel('1/aj'); #作加速度倒数曲线for i=1:69 #从作出的加速度倒数曲线知,各档之间无交点A=ua(i,3)-ua(69,2); #因此换档时刻按低档最高转速对应的车速计if (A<1&A>0)j=i;endB=ua(i,4)-ua(69,3);if(B<2&B>0)k=i;endif(ua(i,4)<=70)m=i;endend #以上是计算三个换档时刻t=ua(1,2)*b(1,2); #开始计算加速时间,这里是以二档起步得到的原始时间for p1=2:69t1(p1)=(ua(p1,2)-ua(p1-1,2))*(b(p1,2)+b(p1-1,2))*0.5;t=t+t1(p1);end #为减小计算误差,采用梯形算法累加,以下均是for p2=j:69t2(p2)=(ua(p2,3)-ua(p2-1,3))*(b(p2,3)+b(p2-1,3))*0.5;t=t+t2(p2);endfor p3=k:mt3(p3)=(ua(p3,4)-ua(p3-1,4))*(b(p3,4)+b(p3-1,4))*0.5;t=t+t3(p3);endt=t+(ua(j,3)-ua(69,2))*b(69,2)+(ua(k,4)-ua(69,3))*b(69,3)+(70-ua(m,4))*b(m,4); #加上了换档处未计算的那部分时间tz=t/3.6; #换算单位disp('加速时间=');disp(tz);disp('s'); #输出计算结果计算结果及图形:汽车最高车速=99.0679km/h汽车最大爬坡度=0.3518加速时间=29.0585s二、计算与绘制题1 中货车的1)汽车功率平衡图;2)最高档与次高档的等速百公里油耗曲线。
汽车理论课后习题Matlab程序-2
2000kg1800kg3880kg0.367mn =0.85f=0.013CDA=2.77m 2i0=5.83If=0.218kg ?m 2Iw1 =1.798kg ?m 21.3确定一轻型货车的动力性能(货车可装用 4挡或5挡变速器,任选 其中的一种进行整车性能计算):1 )绘制汽车驱动力与行驶阻力平衡图。
2 )求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用 2档起步加速行 驶至70km/h 的车速一时间曲线,或者用计算机求汽车用 2档起步加速行驶至 70km/h 的加速时间。
轻型货车的有关数据:汽油发动机使用外特性的Tq-n 曲线的拟合公式为 T q19.313 295.27(-^) 165.44(-^ )240.874(-^)33.8445(-^)4q1000 1000 1000 1000式中,Tq 为发动机转矩(N?m ) ;n 为发动机转速(r/min )。
发动机的最低转速 n min =600r/min,最高转速n max =4000r/min 。
装载质量 整车整备质量 总质量 车轮半径 传动系机械效率 滚动阻力系数空气阻力系数X 迎风面积 主减速器传动比飞轮转动惯量二前轮转动惯量四后轮转动惯量a=1.974mhg=0.9mI w2=3.598kg ?m 2变速器传动比ig (数据如下表)轴距 L=3.2m质心至前轴距离(满载) 质心高(满载)解:Matlab 程序:(1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速程序: n=[600:10:4000];Tq=-19.313+295.27*( n/1000)-165.44*(门/1000)八2+40.874*(门/1000)八3-3 .8445*( n/1000).A4;m=3880;g=9.8; nmi n=600; nm ax=4000; G=m*g;ig=[5.56 2.769 1.644 1.000.793]; nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;lf=0.218;lw1= 1.798;Iw2=3.598; Ft 仁 Tq*ig(1)*i0* nT/r; Ft2=Tq*ig(2)*i0* nT/r;Ft3=Tq*ig(3)*i0* nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua.A2/21.15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title(' 驱动力 -行驶阻力平衡图 ');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff +Fw'); zoom on;[x,y]=ginput(1);zoom off;disp(' 汽车最高车速 =');disp(x);disp('km/h'); 汽车最高车速 =99.30061.00km/h(2) 求汽车最大爬坡度程序: n=[600:10:4000];Tq=-19.313+295.27*( n/1000)-165.44*(门/1000)八2+40.874*(门/1000)八3-3.8445*( n/1000).A4;m=3880;g=9.8; nmi n=600; nm ax=4000; G=m*g; ig=[5.562.7691.6440.793]; nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;lf=0.218;lw1= 1.798;Iw2=3.598; Ft 仁 Tq*ig(1)*i0* nT/r;ua1=0.377*r*n/ig(1)/i0;Ff=G*f;Fw仁CDA*ua"2/21.15;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100*tan(asin(max(Fi1/G)));disp(' 汽车最大爬坡度 =');disp(imax);disp('%');汽车最大爬坡度 =35.2197%(3) 求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19.313+295.27*( n/1000)-165.44*(门/1000)八2+40.874*(门/1000)八3-3 .8445*(门/1000)八4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;1.00ig=[5.56 2.769 1.6440.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Fw仁CDA*ua"2/21.15;Fw2=CDA*ua2.A2/21.15;Fw3=CDA*ua3.A2/21.15;Fw4=CDA*ua4.A2/21.15;Fw5=CDA*ua5.A2/21.15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*rA2)+(If*ig(1)A2*i0A2*nT)/(m*rA2); deta2=1+(Iw1+Iw2)/(m*rA2)+(If*ig(2)A2*i0A2*nT)/(m*rA2); deta3=1+(Iw1+Iw2)/(m*rA2)+(If*ig(3)A2*i0A2*nT)/(m*rA2); deta4=1+(Iw1+Iw2)/(m*rA2)+(If*ig(4)A2*i0A2*nT)/(m*rA2);deta5=1+(Iw1+Iw2)/(m*rA2)+(If*ig(5)A2*i0A2*nT)/(m*rA2);a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([0 99 0 10]);title(' 汽车的加速度倒数曲线 ');xlabel('ua(km/h)');ylabel('1/a');gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext(' 1/a5');a=max(a1);af=asin(max(Ft1-Ff-Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp(' 假设后轮驱动,最大爬坡度相应的附着率 =');disp(C);假设后轮驱动,最大爬坡度相应的附着率 =0.4219(4) >>clearnT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;lf=0.218;lw1=1.798;lw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8;G=m*g; ig=[5.56 2.769 1.644 1.00 0.793]; nmin=600;nm ax=4000; u1=0.377*r* nmin ./ig/i0;u2=0.377*r* nm ax./ig/i0;deta=0*ig;for i=1:5deta(i)=1+(Iw1+Iw2)/(m*r A2)+(If*(ig(i))A2*i0A2* nT)/(m*r A2);end ua=[6:0.01:99];N=le ngth(ua); n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.A2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0.377;Tq=-19.313+295.27*( n/1000)-165.44*( n/1000F2+40.874*( n/1000F3-3. 8445* (n/1000)A4;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)A2+40.874*(n/1000)A3-3. 8445*(n/1000)A4;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(ig(4)*i0/r)/0.377;Tq=-19.313+295.27*( n/1000)-165.44*( n/1000F2+40.874*( n/1000F3-3. 8445* (n/1000)A4;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(ig(5)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)A2+40.874*(n/1000)A3-3.8445*(n/1000)A4;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([0 80 0 100]);title(' 汽车2档原地起步换挡加速时间曲线 ');xlabel('时间t (s)');ylabel('速度ua (km/h )');>> ginput ans =25.8223 70.073725.7467 70.0737所以汽车2档原地起步换挡加速行驶至70km/h的加速时间约为25.8s2.7已知货车装用汽油发动机的负荷特性与万有特性。
汽车理论课后习题答案及MATLAB编程
汽车理论课后习题答案—附MATLAB编程教材:汽车理论(第5版)清华大学余志生主编机械工业出版社出版本文档包含第三章 4.3 5.11 6.2 6.4 6.5所要求的MATLAB编程其它习题答案:第一章:1.1 1.2 1.7 1.8第二章:2.2 2.3 2.4第三章第四章:4.1 4.2 4.3 4.5第五章:5.1 5.8 5.10 5.11 5.12 5.14 5.17第六章:6.1~6.5见本作者另一百度文库文档。
获取方法:点击左上角本作者的昵称,进入本作者的文库,《汽车理论课后习题答案(含MATLAB编程)》第三章:m=3880;%总质量g=9.8;%重力加速度r=0.367;%车轮半径eta_t=0.85;%传动系机械效率f=0.013;%滚动阻力系数CDA=2.77;%空气阻力系数*迎风面积i0=[5.175.435.836.176.33];%主减速器传动比If=0.218;%飞轮转动惯量Iw1=1.798;Iw2=3.598;%两前轮/四后轮转动惯量Iw=Iw1+Iw2;ig4=[6.09 3.091.711];%4挡变速器传动比ig5=[5.56 2.7691.64410.793];%5挡变速器传动比n=600:1:4000;%发动机转速Tq=-19.313+295.27*n/1000-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;%4挡发动机for i=1:5Ft1=Tq*ig4(1)*i0(i)/r;%各档对应转速下的驱动力Ft2=Tq*ig4(2)*i0(i)/r;Ft3=Tq*ig4(3)*i0(i)/r;Ft4=Tq*ig4(4)*i0(i)/r;u1=0.377*r*n/(i0(i)*ig4(1));%各档对应转速下的车速u2=0.377*r*n/(i0(i)*ig4(2));u3=0.377*r*n/(i0(i)*ig4(3));u4=0.377*r*n/(i0(i)*ig4(4));F1=m*g*f+CDA*u1.^2/21.15;%各档对应转速下的行驶阻力F2=m*g*f+CDA*u2.^2/21.15;F3=m*g*f+CDA*u3.^2/21.15;F4=m*g*f+CDA*u4.^2/21.15;delta1=1+(Iw+If.*ig4(1).^2.*i0(i).^2.*eta_t)./(m.*r.^2);%汽车旋转质量换算系数delta2=1+(Iw+If.*ig4(2).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta3=1+(Iw+If.*ig4(3).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta4=1+(Iw+If.*ig4(4).^2.*i0(i).^2.*eta_t)./(m.*r.^2);a1=(Ft1-F1)/(delta1*m);%加速度a2=(Ft2-F2)/(delta2*m);a3=(Ft3-F3)/(delta3*m);a4=(Ft4-F4)/(delta4*m);b1=1./a1;%加速度倒数b2=1./a2;b3=1./a3;b4=1./a4;figure(1)subplot(2,3,i)plot(u1,b1,u2,b2,u3,b3,u4,b4);title('加速度倒数-速度曲线');xlabel('u')ylabel('1/a')gtext('1/a1')gtext('1/a2')gtext('1/a3')gtext('1/a4')gtext(['i0='num2str(i0(i))]);%计算采用2挡起步加速至96.6km/h的原地起步加速时间u1min=min(u1);u1max=max(u1);u2min=u1max;u2min=min(u2);u2max=max(u2);u3min=u2max;u3max=max(u3);u4min=u3max;u4max=96.6;x1=[];x2=[];x3=[];x4=[];y=3401;for j=1:3401if u3(j)<=u3minx1=[j];endendq1=max(x1);ua3=u3(q1:y);a3=b3(q1:y);for k=1:3401if u4(k)<=u4minx2=[k];elseif u4(k)<=u4maxx3=[k];endendq2=max(x2);q3=max(x3);ua4=u4(q2:q3);a4=b4(q2:q3);s2=trapz(b2,u2);%二挡运行时间s3=trapz(ua3,a3);%三挡运行时间s4=trapz(ua4,a4);%四挡运行时间s=[s2s3s4];t=sum(s)*1000/3600;%总时间disp('t=');disp(t);gtext(['t='num2str(t)'s']);Pe1=Ft1.*u1./3600;%各档对应转速下的功率Pe2=Ft2.*u2./3600;Pe3=Ft3.*u3./3600;Pe4=Ft4.*u4./3600;endPemax=max([max(Pe1)max(Pe2)max(Pe3)max(Pe4)]);%发动机最大功率disp('90%负荷');Pe=0.9*Pemax%90%负荷rou=0.7;Ua=0.377*r*3401./(i0.*ig4(4));B=[1233.9-84.4782.9788-0.0474490.00028230];%负荷特性曲线拟合公式系数,对应n=3403r/min for i=1:5b=B*[1Pe Pe^2Pe^3Pe^4]';%根据拟合公式计算比油耗Qs4(i)=Pe.*b./(1.02.*Ua(i).*rou.*g);%百公里油耗量enddisp('Qs4=');disp(Qs4);tt=[48.423546.351141.555733.379630.5564];figure(2)plot(Qs4,tt,'*')hold onxi=25:0.001:31;pp=interp1(Qs4,tt,xi,'cubic');plot(xi,pp)title('燃油经济性-加速时间曲线');xlabel('燃油经济性--等速百公里油耗(L/100km)');ylabel('动力性--原地起步加速时间(s)');gtext('5.17')gtext('5.43')gtext('5.83')gtext('6.17')gtext('6.33')%5挡发动机for i=1:5Ft1=Tq*ig5(1)*i0(i)/r;%各档对应转速下的驱动力Ft2=Tq*ig5(2)*i0(i)/r;Ft3=Tq*ig5(3)*i0(i)/r;Ft4=Tq*ig5(4)*i0(i)/r;Ft5=Tq*ig5(5)*i0(i)/r;u1=0.377*r*n/(i0(i)*ig5(1));%各档对应转速下的车速u2=0.377*r*n/(i0(i)*ig5(2));u3=0.377*r*n/(i0(i)*ig5(3));u4=0.377*r*n/(i0(i)*ig5(4));u5=0.377*r*n/(i0(i)*ig5(5));F1=m*g*f+CDA*u1.^2/21.15;%各档对应转速下的行驶阻力F2=m*g*f+CDA*u2.^2/21.15;F3=m*g*f+CDA*u3.^2/21.15;F4=m*g*f+CDA*u4.^2/21.15;F5=m*g*f+CDA*u5.^2/21.15;delta1=1+(Iw+If.*ig5(1).^2.*i0(i).^2.*eta_t)./(m.*r.^2);%汽车旋转质量换算系数delta2=1+(Iw+If.*ig5(2).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta3=1+(Iw+If.*ig5(3).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta4=1+(Iw+If.*ig5(4).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta5=1+(Iw+If.*ig5(5).^2.*i0(i).^2.*eta_t)./(m.*r.^2);a1=(Ft1-F1)/(delta1*m);%加速度a2=(Ft2-F2)/(delta2*m);a3=(Ft3-F3)/(delta3*m);a4=(Ft4-F4)/(delta4*m);a5=(Ft5-F5)/(delta5*m);b1=1./a1;%加速度倒数b2=1./a2;b3=1./a3;b4=1./a4;b5=1./a5;figure(3)subplot(2,3,i)plot(u1,b1,u2,b2,u3,b3,u4,b4,u5,b5);title('加速度倒数-速度曲线');xlabel('u')ylabel('1/a')gtext('1/a1')gtext('1/a2')gtext('1/a3')gtext('1/a4')gtext('1/a5')gtext(['i0='num2str(i0(i))]);%计算采用2挡起步加速至96.6km/h的原地起步加速时间u1min=min(u1);u1max=max(u1);u2min=u1max;u2min=min(u2);u2max=max(u2);u3min=u2max;u3max=max(u3);u4min=u3max;u4max=max(u4);u5min=u4max;u5max=96.6;x1=[];x2=[];x3=[];x4=[];x5=[];y=3401;for j=1:3401if u3(j)<=u3minx1=[j];endendq1=max(x1);ua3=u3(q1:y);a3=b3(q1:y);for k=1:3401if u4(k)<=u4minx2=[k];endendq2=max(x2);ua4=u4(q2:y);a4=b4(q2:y);for l=1:3401if u5(l)<=u5minx3=[l];elseif u5(l)<=u5maxx4=[l];endendq2=max(x2);q3=max(x3);q4=max(x4);ua5=u5(q3:q4);a5=b5(q3:q4);s2=trapz(b2,u2);%二挡运行时间s3=trapz(ua3,a3);%三挡运行时间s4=trapz(ua4,a4);%四挡运行时间s5=trapz(ua5,a5);%五挡运行时间s=[s2s3s4s5];t=sum(s)*1000/3600;%总时间disp('t=');disp(t);gtext(['t='num2str(t)'s']);Pe1=Ft1.*u1./3600;%各档对应转速下的功率Pe2=Ft2.*u2./3600;Pe3=Ft3.*u3./3600;Pe4=Ft4.*u4./3600;Pe5=Ft5.*u5./3600;endPemax=max([max(Pe1)max(Pe2)max(Pe3)max(Pe4)max(Pe4)]);%发动机最大功率disp('90%负荷');Pe=0.9*Pemax%90%负荷rou=0.7;Ua=0.377*r*3401./(i0.*ig4(4));B=[1233.9-84.4782.9788-0.0474490.00028230];%负荷特性曲线拟合公式系数,对应n=3403r/min for i=1:5b=B*[1Pe Pe^2Pe^3Pe^4]';%根据拟合公式计算比油耗Qs5(i)=Pe.*b./(1.02.*Ua(i).*rou.*g);%百公里油耗量enddisp('Qs5=');disp(Qs5);tt=[93.973058.283444.678445.366744.9793];figure(2)plot(Qs5,tt,'*')hold onxi=30:0.001:100;pp=interp1(Qs5,tt,xi,'cubic');plot(xi,pp)%title('燃油经济性-加速时间曲线');%xlabel('燃油经济性--等速百公里油耗(L/100km)');%ylabel('动力性--原地起步加速时间(s)');gtext('5.17')gtext('5.43')gtext('5.83')gtext('6.17')gtext('6.33')运行结果:t=48.4235t=46.3511t=41.5557t=33.3796t=30.556490%负荷Pe=55.5647Qs4=25.103126.365628.307829.958730.7356图1加速度倒数-速度曲线图2燃油经济性-加速时间曲线4.3%空载(no load)—1;满载(full load)—2m1=4080;m2=9290;hg1=0.845;hg2=1.170;L=3.950;a1=2.100;a2=2.950;b1=L-a1;b2=L-a2;beta=0.38;%利用附着系数与制动强度的关系曲线z=0:0.01:1;phi_f1=L*beta.*z./(b1+z*hg1);%前轮利用附着系数(空载)phi_r1=L*(1-beta).*z./(a1-z*hg1);%空载时后轮利用附着系数(空载)phi_f2=L*beta.*z./(b2+z*hg2);%前轮利用附着系数(满载)phi_r2=L*(1-beta).*z./(a2-z*hg2);%后轮利用附着系数(满载)phi=z;%最理想情况figure(1);plot(z,phi_f1,'g--',z,phi_f2,'g-',z,phi_r1,'b--',z,phi_r2,'b-',z,phi,'k-'); axis([0,1,0,1]);grid on;box off;axis square;title('利用附着系数与制动强度的关系曲线');xlabel('制动强度z/g');ylabel('利用附着系数{\phi}');%ECE法规要求界限hold on;z1=0.2:0.01:0.8;z2=0.15:0.01:0.3;z3=0.3:0.01:1;phi1=(z1+0.07)/0.85;phi2=z2-0.08;phi3=z2+0.08;phi4=(z3-0.02)/0.74;plot(z1,phi1,'r-.',z2,phi2,'r-.',z2,phi3,'r-.',z3,phi4,'r-.'); legend('{\phi}_{f}(空载)','{\phi}_{f}(满载)','{\phi}_{r}(空载)',...'{\phi}_{r}(满载)','{\phi}=z','ECE法规要求界限');legend('Location','northwest');%制动效率曲线Ef1=z./phi_f1*100;Er1=z./phi_r1*100;Ef2=z./phi_f2*100;Er2=z./phi_r2*100;figure(2);plot(phi_f1,Ef1,'k',phi_r1,Er1,'k',phi_f2,Ef2,'b',phi_r2,Er2,'b'); axis([0,1,0,100]);grid on;box off;axis square;title('制动效率曲线');xlabel('附着系数{\phi}');ylabel('制动效率(%)');text(0.25,90,'E_f');text(0.6,88,'满载');text(0.8,90,'E_r');text(0.7,65,'空载');text(0.72,72,'E_r');程序运行结果如下:图1图2 5.11L=3.048;K=0.0024;i=20;ua=0:0.01:120;f=1/L.*(1./(3.6./ua+K.*ua./3.6));syms uF(u)=(1/L.*(1./(1./u+K.*u)))./i;plot(ua,f,'b-');xlabel('u_a(km/h)');ylabel('\omega_r/\delta)_s');F(22.35)运行结果:ans=0.1667386094155036.2f=0.1:0.1:100;Gq1=5.12*10^(-5)./f.^2;Gq2=2.02*10^(-3).*f./f;Gq3=7.98*10^(-2).*f.^2;figure(1);loglog(f,Gq1,'b-');box off;axis square;title('位移功率谱密度'); xlabel('f/Hz');ylabel('G_q(f)/(m^2s)');figure(2);loglog(f,Gq2,'b-');box off;axis square;title('速度功率谱密度'); xlabel('f/Hz');ylabel('G_q_''(f)/(m^2/s)');figure(3);loglog(f,Gq3,'b-');box off;axis square;title('加速度功率谱密度'); xlabel('f/Hz');ylabel('G_q_''_''(f)/(m^2/s^3)');运行结果如下:6.4f1=0.1:0.01:1;f2=1:0.01:10;G1=0.010106.*f1.^2;G2=0.010106.*f2./f2;loglog(f1,G1,'b-');hold onloglog(f2,G2,'b-');title('车身加速度的功率谱密度'); xlabel('f/Hz');ylabel('G_z_''_''(f)/m^-^1'); axis([0.1,10,0.0001,0.1]);运行结果如下:6.51.计算说明1)①幅频特性()122222114z q λζλγ⎡⎤-+⎢=⎢⎥∆⎣⎦,其中0ωλω=,()2222222111141λλγζλγλμμ⎡⎤⎡⎤⎛⎫⎛⎫∆=-+--+-⎢⎥⎢⎥ ⎪ ⎪⎝⎭⎝⎭⎣⎦⎣⎦;()12222222211414z z ζλλζλ⎡⎤+⎢=⎢⎥-+⎣⎦;()1222222221414s s s s s p z ζλλζλ⎡⎤+⎢=⎢⎥-+⎣⎦,其中s s ωλω=;②均方根谱()()221~j 2z q H f f ωππ=;()()222~j 2z qH f f ωππ== ;()()2221~1j 2p qz z H f f z qωππ== ;③其他值()0.5360q q G f df σ⎡⎤=⎢⎥⎣⎦⎰ ,()0.536110z z G f df σ⎡⎤=⎢⎥⎣⎦⎰ ,()0.536220z z G f df σ⎡⎤=⎢⎥⎣⎦⎰ ,()0.5360a a G f df σ⎡⎤=⎢⎥⎣⎦⎰()()()()()()13622w 012222412.5362202412.5d 12.5 0.5d d 1d d 4a a a a a a W f G f f f G f f G f f G f f G f f f ⎡⎤=⎢⎥⎣⎦⎡⎤⎛⎫⎛⎫=+++⎢⎥ ⎪ ⎪⎝⎭⎢⎥⎝⎭⎣⎦⎰⎰⎰⎰⎰其中,()()()()()0.5 0.52 2441 412.512.512.536f f f W f f f f <<⎧⎪⎪<<⎪=⎨<<⎪⎪<<⎪⎩()aw w 020lg L a =2)见1)中计算式3)()()()22004q q q G f G G n n uωπ== ()()()1122363622d ~00d d dd f q q f q f H f G f f G f f q σ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎰⎰ ,其中122d 12f q f γλπ⎡⎤=⎢⎥∆⎣⎦ ()()()1122363622d //~00d d dd F Gq q F G q F H f G f f G f f Gq σ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎰⎰ ,其中122222d 1412F f Gq g λζλμπγ⎡⎤⎛⎫-+⎢⎥⎪+⎢⎥⎝⎭=⎢⎥∆⎢⎥⎢⎥⎣⎦其余见1)中计算式2.程序清单1)f0=1.5;zeta=0.25;gamma=9;mu=10;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega0=2*pi*f0;omega_s=2*pi*fs;lambda=omega./omega0;lambda_s=omega./omega_s;%计算并绘制幅频特性delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;p_z2=((1+(2*zeta_s.*lambda_s).^2)./((1-lambda_s.^2).^2+(2*zeta_s.*...lambda_s).^2)).^0.5;figure(1)loglog(f,z1_q,'b-',0:0.1:100,(0:0.1:100)./(0:0.1:100),'g-');axis([0.1,100,0.1,10]);grid on ;title('z_1~q 的幅频特性');xlabel('激振频率f/Hz');ylabel('$$|\frac{z_1}{q}|$$','Interpreter','latex');gtext('0:1');figure(2)loglog(f,z2_z1,'b-',0:0.1:1,(0:0.1:1)./(0:0.1:1),'g-',1:0.1:100,1./...(1:0.1:100),'g-');axis([0.1,100,0.01,10]);grid on;title('z_2~z_1的幅频特性');xlabel('激振频率f/Hz');ylabel('$$|\frac{z_2}{z_1}|$$','Interpreter','latex'); gtext('0:1');gtext('-1:1');figure(3)loglog(f,p_z2,'b-');axis([0.1,100,0.01,10]);grid on;title('p~z_2的幅频特性');xlabel('激振频率f/Hz');ylabel('$$|\frac{p}{z_2}|$$','Interpreter','latex');%计算并绘制均方根谱sqrt_Gq=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u);sqrt_Gz1=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z1_q;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sqrt_Ga=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*p_z2.*z2_z1.*z1_q; figure(4)loglog(f,sqrt_Gz1,'b-');grid on;title('车轮位移均方根谱');xlabel('激振频率f/Hz');ylabel('$\sqrt{G_{z''''1}(f)}$','Interpreter','latex'); figure(5)loglog(f,sqrt_Gz2,'b-');grid on;title('车身位移均方根谱');xlabel('激振频率f/Hz');ylabel('$\sqrt{G_{z''''2}(f)}$','Interpreter','latex'); figure(6)loglog(f,sqrt_Ga,'b-');grid on;title('传至人体的位移均方根谱');xlabel('激振频率f/Hz');ylabel('$\sqrt{G_a(f)}$','Interpreter','latex');%计算其它值sigma_q=sqrt(trapz(f,sqrt_Gq.^2));%路面不平度加速度均方根值sigma_z1=sqrt(trapz(f,sqrt_Gz1.^2));%车轮加速度均方根值sigma_z2=sqrt(trapz(f,sqrt_Gz2.^2));%车身加速度均方根值sigma_a=sqrt(trapz(f,sqrt_Ga.^2));%传至人体的加速度均方根值for i=1:Nif f(i)<=2W(i)=0.5;elseif f(i)<=4W(i)=f(i)/4;elseif f(i)<=12.5W(i)=1;elseW(i)=12.5/f(i);endendaw=sqrt(trapz(f,W.^2.*sqrt_Ga.^2));%加权加速度均方根值a0=10^(-6);Law=20*log10(aw/a0);%加权振级format shortdisp('路面不平度加速度均方根值=');disp(sigma_q);disp('车轮加速度均方根值=');disp(sigma_z1);disp('车身加速度均方根值=');disp(sigma_z2);disp('传至人体的加速度均方根值=');disp(sigma_a);disp('加权加速度均方根值=');disp(aw);disp('加权振级=');disp(Law);2)%随fs变化f0=1.5;zeta=0.25;gamma=9;mu=10;fs=1.5:0.01:6;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega0=2*pi*f0;lambda=omega./omega0;for i=1:length(fs)omega_s=2*pi.*fs(i);lambda_s=omega./omega_s;delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;p_z2=((1+(2*zeta_s.*lambda_s).^2)./((1-lambda_s.^2).^2+(2*zeta_s.*...lambda_s).^2)).^0.5;sqrt_Gq=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u);sqrt_Gz1=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z1_q;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sqrt_Ga=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*p_z2.*z2_z1.*z1_q;for j=1:Nif f(j)<=2W(j)=0.5;elseif f(j)<=4W(j)=f(j)/4;elseif f(j)<=12.5W(j)=1;elseW(j)=12.5/f(j);endendaw(i)=sqrt(trapz(f,W.^2.*sqrt_Ga.^2));enda0=10^(-6);Law=20*log10(aw/a0);figure(1)plot(fs,aw);grid ontitle('a_w随f_s的变化曲线');xlabel('f_s/Hz');ylabel('a_w/m·s^-^2');figure(2)plot(fs,Law);grid ontitle('L_aw随f_s的变化曲线');xlabel('f_s/Hz');ylabel('L_a_w/dB');%随zeta_s变化f0=1.5;zeta=0.25;gamma=9;mu=10;fs=3;zeta_ss=0.125:0.001:0.5;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega0=2*pi*f0;omega_s=2*pi.*fs;lambda=omega./omega0;lambda_s=omega./omega_s;for i=1:length(zeta_ss)zeta_s=zeta_ss(i);delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;p_z2=((1+(2*zeta_s.*lambda_s).^2)./((1-lambda_s.^2).^2+(2*zeta_s.*...lambda_s).^2)).^0.5;sqrt_Gq=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u);sqrt_Gz1=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z1_q;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sqrt_Ga=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*p_z2.*z2_z1.*z1_q;for j=1:Nif f(j)<=2W(j)=0.5;elseif f(j)<=4W(j)=f(j)/4;elseif f(j)<=12.5W(j)=1;elseW(j)=12.5/f(j);endendaw(i)=sqrt(trapz(f,W.^2.*sqrt_Ga.^2));enda0=10^(-6);Law=20*log10(aw/a0);figure(1)plot(zeta_ss,aw);grid ontitle('a_w随\zeta_s的变化曲线');xlabel('\zeta_s');ylabel('a_w/m·s^-^2');figure(2)plot(zeta_ss,Law);grid ontitle('L_aw随\zeta_s的变化曲线');xlabel('\zeta_s');ylabel('L_a_w/dB');3)%随f0变化f0=0.25:0.01:3;zeta=0.25;gamma=9;mu=10;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega_s=2*pi*fs;lambda_s=omega./omega_s;Gq_f=4*pi^2*Gq_n0*n0^2*u;g=9.8;for i=1:length(f0)omega0=2*pi*f0(i);lambda=omega./omega0;delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sigma_z2(i)=sqrt(trapz(f,sqrt_Gz2.^2));fd_q=gamma*lambda.^2./(2*pi.*f).*(1./delta).^0.5;sigma_fd(i)=sqrt(trapz(f,Gq_f.*fd_q.^2));Fd_Gq=2*pi.*f.*gamma./g.*(((lambda.^2./(1+mu)-1).^2+4*zeta.^2*lambda.^2)..../delta).^0.5;sigma_FdG(i)=sqrt(trapz(f,Gq_f.*Fd_Gq.^2));endm=find(f0==1.5);sgm_z2=sigma_z2(m);sgm_fd=sigma_fd(m);sgm_FdG=sigma_FdG(m);sm_z2=20*log10(sigma_z2/sgm_z2);sm_fd=20*log10(sigma_fd/sgm_fd);sm_FdG=20*log10(sigma_FdG/sgm_FdG);plot(f0,sm_z2,f0,sm_fd,f0,sm_FdG);axis([0.25,3,-25,10]);grid on;title('各响应量均方根值随f_0变化的曲线');xlabel('f_0/Hz');ylabel('\sigma_z_''_''_2,\sigma_f_d,\sigma_F_d_/_G/dB'); legend('\sigma_z_''_''_2','\sigma_f_d','\sigma_F_d_/_G');legend('Location','southeast');%随zeta变化f0=1.5;zeta0=0.125:0.001:0.5;gamma=9;mu=10;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega_s=2*pi*fs;omega0=2*pi*f0;lambda_s=omega./omega_s;lambda=omega./omega0;Gq_f=4*pi^2*Gq_n0*n0^2*u;g=9.8;for i=1:length(zeta0)zeta=zeta0(i);delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sigma_z2(i)=sqrt(trapz(f,sqrt_Gz2.^2));fd_q=gamma*lambda.^2./(2*pi.*f).*(1./delta).^0.5;sigma_fd(i)=sqrt(trapz(f,Gq_f.*fd_q.^2));Fd_Gq=2*pi.*f.*gamma./g.*(((lambda.^2./(1+mu)-1).^2+4*zeta.^2*lambda.^2)..../delta).^0.5;sigma_FdG(i)=sqrt(trapz(f,Gq_f.*Fd_Gq.^2));endm=find(zeta0==0.25);sgm_z2=sigma_z2(m);sgm_fd=sigma_fd(m);sgm_FdG=sigma_FdG(m);sm_z2=20*log10(sigma_z2/sgm_z2);sm_fd=20*log10(sigma_fd/sgm_fd);sm_FdG=20*log10(sigma_FdG/sgm_FdG);plot(zeta0,sm_z2,zeta0,sm_fd,zeta0,sm_FdG);axis([0.125,0.5,-4,4]);grid on;title('各响应量均方根值随\zeta变化的曲线');xlabel('\zeta');ylabel('\sigma_z_''_''_2,\sigma_f_d,\sigma_F_d_/_G/dB'); legend('\sigma_z_''_''_2','\sigma_f_d','\sigma_F_d_/_G');%随gamma变化f0=1.5;zeta=0.25;gamma0=4.5:0.1:18;mu=10;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega_s=2*pi*fs;omega0=2*pi*f0;lambda_s=omega./omega_s;lambda=omega./omega0;Gq_f=4*pi^2*Gq_n0*n0^2*u;g=9.8;for i=1:length(gamma0)gamma=gamma0(i);delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sigma_z2(i)=sqrt(trapz(f,sqrt_Gz2.^2));fd_q=gamma*lambda.^2./(2*pi.*f).*(1./delta).^0.5;sigma_fd(i)=sqrt(trapz(f,Gq_f.*fd_q.^2));Fd_Gq=2*pi.*f.*gamma./g.*(((lambda.^2./(1+mu)-1).^2+4*zeta.^2*lambda.^2)..../delta).^0.5;sigma_FdG(i)=sqrt(trapz(f,Gq_f.*Fd_Gq.^2));endm=find(gamma0==9);sgm_z2=sigma_z2(m);sgm_fd=sigma_fd(m);sgm_FdG=sigma_FdG(m);sm_z2=20*log10(sigma_z2/sgm_z2);sm_fd=20*log10(sigma_fd/sgm_fd);sm_FdG=20*log10(sigma_FdG/sgm_FdG);plot(gamma0,sm_z2,gamma0,sm_fd,gamma0,sm_FdG);axis([4.5,18,-6,6]);grid on;title('各响应量均方根值随\gamma变化的曲线');xlabel('\gamma');ylabel('\sigma_z_''_''_2,\sigma_f_d,\sigma_F_d_/_G/dB'); legend('\sigma_z_''_''_2','\sigma_f_d','\sigma_F_d_/_G');legend('Location','southeast');%随mu变化f0=1.5;zeta=0.25;gamma=9;mu0=5:0.1:20;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega_s=2*pi*fs;omega0=2*pi*f0;lambda_s=omega./omega_s;lambda=omega./omega0;Gq_f=4*pi^2*Gq_n0*n0^2*u;g=9.8;for i=1:length(mu0)mu=mu0(i);delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sigma_z2(i)=sqrt(trapz(f,sqrt_Gz2.^2));fd_q=gamma*lambda.^2./(2*pi.*f).*(1./delta).^0.5;sigma_fd(i)=sqrt(trapz(f,Gq_f.*fd_q.^2));Fd_Gq=2*pi.*f.*gamma./g.*(((lambda.^2./(1+mu)-1).^2+4*zeta.^2*lambda.^2)..../delta).^0.5;sigma_FdG(i)=sqrt(trapz(f,Gq_f.*Fd_Gq.^2));endm=find(mu0==10);sgm_z2=sigma_z2(m);sgm_fd=sigma_fd(m);sgm_FdG=sigma_FdG(m);sm_z2=20*log10(sigma_z2/sgm_z2);sm_fd=20*log10(sigma_fd/sgm_fd);sm_FdG=20*log10(sigma_FdG/sgm_FdG);plot(mu0,sm_z2,mu0,sm_fd,mu0,sm_FdG);axis([5,20,-2,2]);grid on;title('各响应量均方根值随\mu变化的曲线');xlabel('\mu');ylabel('\sigma_z_''_''_2,\sigma_f_d,\sigma_F_d_/_G/dB');legend('\sigma_z_''_''_2','\sigma_f_d','\sigma_F_d_/_G');3.结果分析1)路面不平度加速度均方根值=0.3523车轮加速度均方根值=0.2391车身加速度均方根值=0.0168传至人体的加速度均方根值=0.0161加权加速度均方根值=0.0100加权振级=80.0287分析:根据课本中表6-2,a w=0.0100<0.315,L aw=80.0287<110,故乘客没有不舒适。
汽车理论课后习题MATLAB编程-武汉理工版
汽车理论课后习题MATLAB编程1.3 确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间。
解:(1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua.^2/21.15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw');zoom on;[x,y]=ginput(1);zoom off;disp('汽车最高车速=');disp(x);disp('km/h');汽车最高车速=99.3006km/h(2)求汽车最大爬坡度程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;Ff=G*f;Fw1=CDA*ua1.^2/21.15;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100*tan(asin(max(Fi1/G)));disp('汽车最大爬坡度=');disp(imax);disp('%');汽车最大爬坡度=35.2197%(3)求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Fw1=CDA*ua1.^2/21.15;Fw2=CDA*ua2.^2/21.15;Fw3=CDA*ua3.^2/21.15;Fw4=CDA*ua4.^2/21.15;Fw5=CDA*ua5.^2/21.15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*r^2)+(If*ig(1)^2*i0^2*nT)/(m*r^2);deta2=1+(Iw1+Iw2)/(m*r^2)+(If*ig(2)^2*i0^2*nT)/(m*r^2);deta3=1+(Iw1+Iw2)/(m*r^2)+(If*ig(3)^2*i0^2*nT)/(m*r^2);deta4=1+(Iw1+Iw2)/(m*r^2)+(If*ig(4)^2*i0^2*nT)/(m*r^2);deta5=1+(Iw1+Iw2)/(m*r^2)+(If*ig(5)^2*i0^2*nT)/(m*r^2);a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([0 99 0 10]);title('汽车的加速度倒数曲线');xlabel('ua(km/h)');ylabel('1/a');gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5');a=max(a1);af=asin(max(Ft1-Ff-Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp('假设后轮驱动,最大爬坡度相应的附着率=');disp(C);假设后轮驱动,最大爬坡度相应的附着率=0.4219(4) >>clearnT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8;G=m*g; ig=[5.56 2.769 1.644 1.00 0.793];nmin=600;nmax=4000;u1=0.377*r*nmin./ig/i0;u2=0.377*r*nmax./ig/i0;deta=0*ig;for i=1:5deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nT)/(m*r^2);endua=[6:0.01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(ig(4)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(ig(5)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([0 80 0 100]);title('汽车2档原地起步换挡加速时间曲线');xlabel('时间t(s)');ylabel('速度ua(km/h)');>> ginputans =25.8223 70.073725.7467 70.0737所以汽车2档原地起步换挡加速行驶至70km/h的加速时间约为25.8s2.7已知货车装用汽油发动机的负荷特性与万有特性。
汽车理论课后习题matlab程序文件
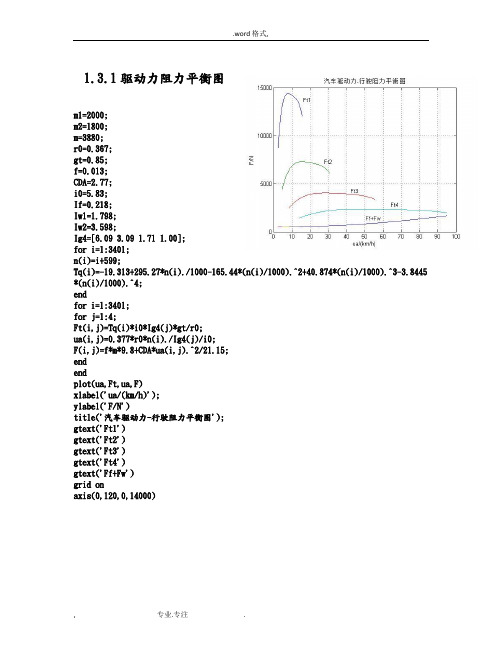
1.3.1驱动力阻力平衡图m1=2000;m2=1800;m=3880;r0=0.367;gt=0.85;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;Ig4=[6.09 3.09 1.71 1.00];for i=1:3401;n(i)=i+599;Tq(i)=-19.313+295.27*n(i)./1000-165.44*(n(i)/1000).^2+40.874*(n(i)/1000).^3-3.8445 *(n(i)/1000).^4;endfor i=1:3401;for j=1:4;Ft(i,j)=Tq(i)*i0*Ig4(j)*gt/r0;ua(i,j)=0.377*r0*n(i)./Ig4(j)/i0;F(i,j)=f*m*9.8+CDA*ua(i,j).^2/21.15;endendplot(ua,Ft,ua,F)xlabel('ua/(km/h)');ylabel('F/N')title('汽车驱动力-行驶阻力平衡图');gtext('Ft1')gtext('Ft2')gtext('Ft3')gtext('Ft4')gtext('Ff+Fw')grid onaxis(0,120,0,14000)1.3.3加速度倒数曲线m1=2000;m2=1800;m=3880;r0=0.367;gt=0.85;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;Ig4=[6.09 3.09 1.71 1.00];q=1.128;for i=1:3401;n(i)=i+599;Tq(i)=-19.313+295.27*n(i)./1000-165.44*(n(i)/1000).^2+40.874*(n(i)/1000).^3-3.8445 *(n(i)/1000).^4;endfor i=1:3401;for j=1:4;Ft(i,j)=Tq(i)*i0*Ig4(j)*gt/r0;ua(i,j)=0.377*r0*n(i)./Ig4(j)/i0;F(i,j)=f*m*9.8+CDA*ua(i,j).^2/21.15;b(i,j)=q*m/(Ft(i,j)-0.131*ua(i,j)^2-9.8*m*f);%加速度倒数%endendplot(ua,b);xlabel('ua/(km/h)');ylabel('1/a/(s^2/m)');title('加速度倒数曲线')gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');grid on;axis([0,50,0,5])2.7功率平衡曲线m1=2000;m2=1800;m=3880;r0=0.367;gt=0.85;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;Ig4=[6.09 3.09 1.71 1.00];for i=1:3401;n(i)=i+599;Tq(i)=-19.313+295.27*n(i)/1000-165.44*(n(i)/1000)^2+40.874*(n(i)/1000)^3-3.8445*(n (i)/1000)^4;endfor i=1:3401;for j=1:4;Ft(i,j)=Tq(i)*i0*Ig4(j)*gt/r0;ua(i,j)=0.377*r0*n(i)./(Ig4(j)*i0);Pe(i,j)=Ft(i,j)*ua(i,j)/3600;%Pe EXPRESSION%c(i,j)=7.647*ua(i,j)/1000+3.638*ua(i,j)^3/100000;%(Pf+Pw)/gt EXPRESSION%end;end;plot(ua,Pe,ua,c);xlabel('ua/(km/h)');ylabel('Pe/kW');title('功率平衡图');gtext('Pe1');gtext('Pe2');gtext('Pe3');gtext('Pe4');gtext('P阻力');grid on;axis([0,90,0,20]);最高档等速百公里油耗曲线i0=5.83;r=0.367;t=0.85;m=3880;G=38024;f=0.013;CdA=2.77;pg=7.12;ig3=1.71;ig4=1;n=[815 1207 1614 2012 2603 3006 3403 3804];B0=[1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7];B1=[-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291] ;B2=[72.379 36.657 14.524 7.0035 4.4763 2.8593 2.9788 0.71113];B3=[-5.8629 -2.0553 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215];B4=[0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230 -0.000038568];ua=(0.377*r*n)/(ig4*i0);Tq=-19.313+295.27*n/1000-165.44*((n/1000).^2)+40.874*((n/1000).^3)-3.8445*((n/1000 ).^4);P=(1/t)*(G*f*ua/3600+CdA*ua.^3/76140);b=B0+B1.*P+B2.*P.^2+B3.*P.^3+B4.*P.^4;Qs=P.*b./(1.02*ua*pg);b=polyfit(ua,Qs,3);ua4=8:1:100;f=polyval(b,ua4);figure;plot(ua,Qs,'ko',ua4,f,'LineWidth',2);title('汽车最高档等速百公里油耗曲线');xlabel('ua/(km/h)');ylabel('Qs/[1/L(100km)]');次高档等速百公里油耗曲线i0=5.83;r=0.367;t=0.85;m=3880;G=38024;f=0.013;CdA=2.77;pg=7.12;ig3=1.71;ig4=1;n=[815 1207 1614 2012 2603 3006 3403 3804];B0=[1326.8 1354.7 1284.4 1122.9 1141.0 1051.2 1233.9 1129.7];B1=[-416.46 -303.98 -189.75 -121.59 -98.893 -73.714 -84.478 -45.291] ;B2=[72.379 36.657 14.524 7.0035 4.4763 2.8593 2.9788 0.71113];B3=[-5.8629 -2.0553 -0.51184 -0.18517 -0.091077 -0.05138 -0.047449 -0.00075215];B4=[0.17768 0.043072 0.0068164 0.0018555 0.00068906 0.00035032 0.00028230 -0.000038568];ua=(0.377*r*n)/(ig3*i0);Tq=-19.313+295.27*n/1000-165.44*((n/1000).^2)+40.874*((n/1000).^3)-3.8445*((n/1000 ).^4);P=(1/t)*(G*f*ua/3600+CdA*ua.^3/76140);b=B0+B1.*P+B2.*P.^2+B3.*P.^3+B4.*P.^4;Qs=P.*b./(1.02*ua*pg);b=polyfit(ua,Qs,3);ua4=8:1:55;f=polyval(b,ua4);figure;plot(ua,Qs,'ko',ua4,f,'LineWidth',2);title('汽车次高档等速百公里油耗曲线'); xlabel('ua/(km/h)');ylabel('Qs/[1/L(100km)]');。
汽车理论习题Matlab程序

确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h 的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间。
轻型货车的有关数据:汽油发动机使用外特性的Tq-n曲线的拟合公式为式中,Tq为发动机转矩(N?m);n为发动机转速(r/min)。
发动机的最低转速nmin =600r/min,最高转速nmax=4000r/min。
装载质量 2000kg整车整备质量 1800kg总质量 3880kg车轮半径 0.367m传动系机械效率ηt=0.85滚动阻力系数f=0.013空气阻力系数×迎风面积C D A=2.77m2主减速器传动比i0=5.83飞轮转动惯量 I f=0.218kg?m2二前轮转动惯量I w1=1.798kg?m2四后轮转动惯量I w2=3.598kg?m2变速器传动比 ig(数据如下表)轴距 L=3.2m质心至前轴距离(满载) a=1.974m质心高(满载) hg=0.9m解:Matlab程序:(1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/100 0).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua.^2/21.15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw' );zoom on;[x,y]=ginput(1);zoom off;disp('汽车最高车速=');disp(x);disp('km/h');汽车最高车速=99.3006km/h(2)求汽车最大爬坡度程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;Ff=G*f;Fw1=CDA*ua1.^2/21.15;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100*tan(asin(max(Fi1/G)));disp('汽车最大爬坡度=');disp(imax);disp('%');汽车最大爬坡度=35.2197%(3)求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/100 0).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Fw1=CDA*ua1.^2/21.15;Fw2=CDA*ua2.^2/21.15;Fw3=CDA*ua3.^2/21.15;Fw4=CDA*ua4.^2/21.15;Fw5=CDA*ua5.^2/21.15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*r^2)+(If*ig(1)^2*i0^2*nT)/(m*r^2); deta2=1+(Iw1+Iw2)/(m*r^2)+(If*ig(2)^2*i0^2*nT)/(m*r^2); deta3=1+(Iw1+Iw2)/(m*r^2)+(If*ig(3)^2*i0^2*nT)/(m*r^2); deta4=1+(Iw1+Iw2)/(m*r^2)+(If*ig(4)^2*i0^2*nT)/(m*r^2); deta5=1+(Iw1+Iw2)/(m*r^2)+(If*ig(5)^2*i0^2*nT)/(m*r^2); a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([0 99 0 10]);title('汽车的加速度倒数曲线');xlabel('ua(km/h)');ylabel('1/a');gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5'); a=max(a1);af=asin(max(Ft1-Ff-Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp('假设后轮驱动,最大爬坡度相应的附着率=');disp(C);假设后轮驱动,最大爬坡度相应的附着率=0.4219(4) >>clearnT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8; G=m*g; ig=[5.56 2.769 1.644 1.00 0.793];nmin=600;nmax=4000;u1=0.377*r*nmin./ig/i0;u2=0.377*r*nmax./ig/i0;deta=0*ig;for i=1:5deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nT)/(m*r^2);endua=[6:0.01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000) ^4;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000) ^4;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(ig(4)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000) ^4;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(ig(5)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i)); delta(i)=0.01*inv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([0 80 0 100]);title('汽车2档原地起步换挡加速时间曲线'); xlabel('时间t(s)');ylabel('速度ua(km/h)');>> ginputans =25.8223 70.073725.7467 70.0737所以汽车2档原地起步换挡加速行驶至70km/h 的加速时间约为25.8s2.7已知货车装用汽油发动机的负荷特性与万有特性。
汽车理论习题Maab程序
确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h 的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间。
轻型货车的有关数据:汽油发动机使用外特性的Tq-n曲线的拟合公式为式中,Tq为发动机转矩(N?m);n为发动机转速(r/min)。
发动机的最低转速nmin =600r/min,最高转速nmax=4000r/min。
装载质量 2000kg整车整备质量 1800kg总质量 3880kg车轮半径 0.367m传动系机械效率ηt=0.85滚动阻力系数f=0.013空气阻力系数×迎风面积C D A=2.77m2主减速器传动比i0=5.83飞轮转动惯量 I f=0.218kg?m2二前轮转动惯量I w1=1.798kg?m2四后轮转动惯量I w2=3.598kg?m2变速器传动比 ig(数据如下表)轴距 L=3.2m质心至前轴距离(满载) a=1.974m质心高(满载) hg=0.9m解:Matlab程序:(1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/100 0).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua.^2/21.15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw' );zoom on;[x,y]=ginput(1);zoom off;disp('汽车最高车速=');disp(x);disp('km/h');汽车最高车速=99.3006km/h(2)求汽车最大爬坡度程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;Ff=G*f;Fw1=CDA*ua1.^2/21.15;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100*tan(asin(max(Fi1/G)));disp('汽车最大爬坡度=');disp(imax);disp('%');汽车最大爬坡度=35.2197%(3)求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/100 0).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Fw1=CDA*ua1.^2/21.15;Fw2=CDA*ua2.^2/21.15;Fw3=CDA*ua3.^2/21.15;Fw4=CDA*ua4.^2/21.15;Fw5=CDA*ua5.^2/21.15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*r^2)+(If*ig(1)^2*i0^2*nT)/(m*r^2); deta2=1+(Iw1+Iw2)/(m*r^2)+(If*ig(2)^2*i0^2*nT)/(m*r^2); deta3=1+(Iw1+Iw2)/(m*r^2)+(If*ig(3)^2*i0^2*nT)/(m*r^2); deta4=1+(Iw1+Iw2)/(m*r^2)+(If*ig(4)^2*i0^2*nT)/(m*r^2); deta5=1+(Iw1+Iw2)/(m*r^2)+(If*ig(5)^2*i0^2*nT)/(m*r^2); a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([0 99 0 10]);title('汽车的加速度倒数曲线');xlabel('ua(km/h)');ylabel('1/a');gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5'); a=max(a1);af=asin(max(Ft1-Ff-Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp('假设后轮驱动,最大爬坡度相应的附着率=');disp(C);假设后轮驱动,最大爬坡度相应的附着率=0.4219(4) >>clearnT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8; G=m*g; ig=[5.56 2.769 1.644 1.00 0.793];nmin=600;nmax=4000;u1=0.377*r*nmin./ig/i0;u2=0.377*r*nmax./ig/i0;deta=0*ig;for i=1:5deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nT)/(m*r^2);endua=[6:0.01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000) ^4;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000) ^4;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(ig(4)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000) ^4;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(ig(5)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i)); delta(i)=0.01*inv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([0 80 0 100]);title('汽车2档原地起步换挡加速时间曲线'); xlabel('时间t(s)');ylabel('速度ua(km/h)');>> ginputans =25.8223 70.073725.7467 70.0737所以汽车2档原地起步换挡加速行驶至70km/h 的加速时间约为25.8s2.7已知货车装用汽油发动机的负荷特性与万有特性。
汽车理论课后习题答案及MATLAB编程
汽车理论课后习题答案—附MATLAB编程教材:汽车理论(第5版)清华大学余志生主编机械工业出版社出版本文档包含第三章 4.3 5.11 6.2 6.4 6.5所要求的MATLAB编程其它习题答案:第一章:1.1 1.2 1.7 1.8第二章:2.2 2.3 2.4第三章第四章:4.1 4.2 4.3 4.5第五章:5.1 5.8 5.10 5.11 5.12 5.14 5.17第六章:6.1~6.5见本作者另一百度文库文档。
获取方法:点击左上角本作者的昵称,进入本作者的文库,《汽车理论课后习题答案(含MATLAB编程)》第三章:m=3880;%总质量g=9.8;%重力加速度r=0.367;%车轮半径eta_t=0.85;%传动系机械效率f=0.013;%滚动阻力系数CDA=2.77;%空气阻力系数*迎风面积i0=[5.175.435.836.176.33];%主减速器传动比If=0.218;%飞轮转动惯量Iw1=1.798;Iw2=3.598;%两前轮/四后轮转动惯量Iw=Iw1+Iw2;ig4=[6.09 3.091.711];%4挡变速器传动比ig5=[5.56 2.7691.64410.793];%5挡变速器传动比n=600:1:4000;%发动机转速Tq=-19.313+295.27*n/1000-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;%4挡发动机for i=1:5Ft1=Tq*ig4(1)*i0(i)/r;%各档对应转速下的驱动力Ft2=Tq*ig4(2)*i0(i)/r;Ft3=Tq*ig4(3)*i0(i)/r;Ft4=Tq*ig4(4)*i0(i)/r;u1=0.377*r*n/(i0(i)*ig4(1));%各档对应转速下的车速u2=0.377*r*n/(i0(i)*ig4(2));u3=0.377*r*n/(i0(i)*ig4(3));u4=0.377*r*n/(i0(i)*ig4(4));F1=m*g*f+CDA*u1.^2/21.15;%各档对应转速下的行驶阻力F2=m*g*f+CDA*u2.^2/21.15;F3=m*g*f+CDA*u3.^2/21.15;F4=m*g*f+CDA*u4.^2/21.15;delta1=1+(Iw+If.*ig4(1).^2.*i0(i).^2.*eta_t)./(m.*r.^2);%汽车旋转质量换算系数delta2=1+(Iw+If.*ig4(2).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta3=1+(Iw+If.*ig4(3).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta4=1+(Iw+If.*ig4(4).^2.*i0(i).^2.*eta_t)./(m.*r.^2);a1=(Ft1-F1)/(delta1*m);%加速度a2=(Ft2-F2)/(delta2*m);a3=(Ft3-F3)/(delta3*m);a4=(Ft4-F4)/(delta4*m);b1=1./a1;%加速度倒数b2=1./a2;b3=1./a3;b4=1./a4;figure(1)subplot(2,3,i)plot(u1,b1,u2,b2,u3,b3,u4,b4);title('加速度倒数-速度曲线');xlabel('u')ylabel('1/a')gtext('1/a1')gtext('1/a2')gtext('1/a3')gtext('1/a4')gtext(['i0='num2str(i0(i))]);%计算采用2挡起步加速至96.6km/h的原地起步加速时间u1min=min(u1);u1max=max(u1);u2min=u1max;u2min=min(u2);u2max=max(u2);u3min=u2max;u3max=max(u3);u4min=u3max;u4max=96.6;x1=[];x2=[];x3=[];x4=[];y=3401;for j=1:3401if u3(j)<=u3minx1=[j];endendq1=max(x1);ua3=u3(q1:y);a3=b3(q1:y);for k=1:3401if u4(k)<=u4minx2=[k];elseif u4(k)<=u4maxx3=[k];endendq2=max(x2);q3=max(x3);ua4=u4(q2:q3);a4=b4(q2:q3);s2=trapz(b2,u2);%二挡运行时间s3=trapz(ua3,a3);%三挡运行时间s4=trapz(ua4,a4);%四挡运行时间s=[s2s3s4];t=sum(s)*1000/3600;%总时间disp('t=');disp(t);gtext(['t='num2str(t)'s']);Pe1=Ft1.*u1./3600;%各档对应转速下的功率Pe2=Ft2.*u2./3600;Pe3=Ft3.*u3./3600;Pe4=Ft4.*u4./3600;endPemax=max([max(Pe1)max(Pe2)max(Pe3)max(Pe4)]);%发动机最大功率disp('90%负荷');Pe=0.9*Pemax%90%负荷rou=0.7;Ua=0.377*r*3401./(i0.*ig4(4));B=[1233.9-84.4782.9788-0.0474490.00028230];%负荷特性曲线拟合公式系数,对应n=3403r/min for i=1:5b=B*[1Pe Pe^2Pe^3Pe^4]';%根据拟合公式计算比油耗Qs4(i)=Pe.*b./(1.02.*Ua(i).*rou.*g);%百公里油耗量enddisp('Qs4=');disp(Qs4);tt=[48.423546.351141.555733.379630.5564];figure(2)plot(Qs4,tt,'*')hold onxi=25:0.001:31;pp=interp1(Qs4,tt,xi,'cubic');plot(xi,pp)title('燃油经济性-加速时间曲线');xlabel('燃油经济性--等速百公里油耗(L/100km)');ylabel('动力性--原地起步加速时间(s)');gtext('5.17')gtext('5.43')gtext('5.83')gtext('6.17')gtext('6.33')%5挡发动机for i=1:5Ft1=Tq*ig5(1)*i0(i)/r;%各档对应转速下的驱动力Ft2=Tq*ig5(2)*i0(i)/r;Ft3=Tq*ig5(3)*i0(i)/r;Ft4=Tq*ig5(4)*i0(i)/r;Ft5=Tq*ig5(5)*i0(i)/r;u1=0.377*r*n/(i0(i)*ig5(1));%各档对应转速下的车速u2=0.377*r*n/(i0(i)*ig5(2));u3=0.377*r*n/(i0(i)*ig5(3));u4=0.377*r*n/(i0(i)*ig5(4));u5=0.377*r*n/(i0(i)*ig5(5));F1=m*g*f+CDA*u1.^2/21.15;%各档对应转速下的行驶阻力F2=m*g*f+CDA*u2.^2/21.15;F3=m*g*f+CDA*u3.^2/21.15;F4=m*g*f+CDA*u4.^2/21.15;F5=m*g*f+CDA*u5.^2/21.15;delta1=1+(Iw+If.*ig5(1).^2.*i0(i).^2.*eta_t)./(m.*r.^2);%汽车旋转质量换算系数delta2=1+(Iw+If.*ig5(2).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta3=1+(Iw+If.*ig5(3).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta4=1+(Iw+If.*ig5(4).^2.*i0(i).^2.*eta_t)./(m.*r.^2);delta5=1+(Iw+If.*ig5(5).^2.*i0(i).^2.*eta_t)./(m.*r.^2);a1=(Ft1-F1)/(delta1*m);%加速度a2=(Ft2-F2)/(delta2*m);a3=(Ft3-F3)/(delta3*m);a4=(Ft4-F4)/(delta4*m);a5=(Ft5-F5)/(delta5*m);b1=1./a1;%加速度倒数b2=1./a2;b3=1./a3;b4=1./a4;b5=1./a5;figure(3)subplot(2,3,i)plot(u1,b1,u2,b2,u3,b3,u4,b4,u5,b5);title('加速度倒数-速度曲线');xlabel('u')ylabel('1/a')gtext('1/a1')gtext('1/a2')gtext('1/a3')gtext('1/a4')gtext('1/a5')gtext(['i0='num2str(i0(i))]);%计算采用2挡起步加速至96.6km/h的原地起步加速时间u1min=min(u1);u1max=max(u1);u2min=u1max;u2min=min(u2);u2max=max(u2);u3min=u2max;u3max=max(u3);u4min=u3max;u4max=max(u4);u5min=u4max;u5max=96.6;x1=[];x2=[];x3=[];x4=[];x5=[];y=3401;for j=1:3401if u3(j)<=u3minx1=[j];endendq1=max(x1);ua3=u3(q1:y);a3=b3(q1:y);for k=1:3401if u4(k)<=u4minx2=[k];endendq2=max(x2);ua4=u4(q2:y);a4=b4(q2:y);for l=1:3401if u5(l)<=u5minx3=[l];elseif u5(l)<=u5maxx4=[l];endendq2=max(x2);q3=max(x3);q4=max(x4);ua5=u5(q3:q4);a5=b5(q3:q4);s2=trapz(b2,u2);%二挡运行时间s3=trapz(ua3,a3);%三挡运行时间s4=trapz(ua4,a4);%四挡运行时间s5=trapz(ua5,a5);%五挡运行时间s=[s2s3s4s5];t=sum(s)*1000/3600;%总时间disp('t=');disp(t);gtext(['t='num2str(t)'s']);Pe1=Ft1.*u1./3600;%各档对应转速下的功率Pe2=Ft2.*u2./3600;Pe3=Ft3.*u3./3600;Pe4=Ft4.*u4./3600;Pe5=Ft5.*u5./3600;endPemax=max([max(Pe1)max(Pe2)max(Pe3)max(Pe4)max(Pe4)]);%发动机最大功率disp('90%负荷');Pe=0.9*Pemax%90%负荷rou=0.7;Ua=0.377*r*3401./(i0.*ig4(4));B=[1233.9-84.4782.9788-0.0474490.00028230];%负荷特性曲线拟合公式系数,对应n=3403r/min for i=1:5b=B*[1Pe Pe^2Pe^3Pe^4]';%根据拟合公式计算比油耗Qs5(i)=Pe.*b./(1.02.*Ua(i).*rou.*g);%百公里油耗量enddisp('Qs5=');disp(Qs5);tt=[93.973058.283444.678445.366744.9793];figure(2)plot(Qs5,tt,'*')hold onxi=30:0.001:100;pp=interp1(Qs5,tt,xi,'cubic');plot(xi,pp)%title('燃油经济性-加速时间曲线');%xlabel('燃油经济性--等速百公里油耗(L/100km)');%ylabel('动力性--原地起步加速时间(s)');gtext('5.17')gtext('5.43')gtext('5.83')gtext('6.17')gtext('6.33')运行结果:t=48.4235t=46.3511t=41.5557t=33.3796t=30.556490%负荷Pe=55.5647Qs4=25.103126.365628.307829.958730.7356图1加速度倒数-速度曲线图2燃油经济性-加速时间曲线4.3%空载(no load)—1;满载(full load)—2m1=4080;m2=9290;hg1=0.845;hg2=1.170;L=3.950;a1=2.100;a2=2.950;b1=L-a1;b2=L-a2;beta=0.38;%利用附着系数与制动强度的关系曲线z=0:0.01:1;phi_f1=L*beta.*z./(b1+z*hg1);%前轮利用附着系数(空载)phi_r1=L*(1-beta).*z./(a1-z*hg1);%空载时后轮利用附着系数(空载)phi_f2=L*beta.*z./(b2+z*hg2);%前轮利用附着系数(满载)phi_r2=L*(1-beta).*z./(a2-z*hg2);%后轮利用附着系数(满载)phi=z;%最理想情况figure(1);plot(z,phi_f1,'g--',z,phi_f2,'g-',z,phi_r1,'b--',z,phi_r2,'b-',z,phi,'k-'); axis([0,1,0,1]);grid on;box off;axis square;title('利用附着系数与制动强度的关系曲线');xlabel('制动强度z/g');ylabel('利用附着系数{\phi}');%ECE法规要求界限hold on;z1=0.2:0.01:0.8;z2=0.15:0.01:0.3;z3=0.3:0.01:1;phi1=(z1+0.07)/0.85;phi2=z2-0.08;phi3=z2+0.08;phi4=(z3-0.02)/0.74;plot(z1,phi1,'r-.',z2,phi2,'r-.',z2,phi3,'r-.',z3,phi4,'r-.'); legend('{\phi}_{f}(空载)','{\phi}_{f}(满载)','{\phi}_{r}(空载)',...'{\phi}_{r}(满载)','{\phi}=z','ECE法规要求界限');legend('Location','northwest');%制动效率曲线Ef1=z./phi_f1*100;Er1=z./phi_r1*100;Ef2=z./phi_f2*100;Er2=z./phi_r2*100;figure(2);plot(phi_f1,Ef1,'k',phi_r1,Er1,'k',phi_f2,Ef2,'b',phi_r2,Er2,'b'); axis([0,1,0,100]);grid on;box off;axis square;title('制动效率曲线');xlabel('附着系数{\phi}');ylabel('制动效率(%)');text(0.25,90,'E_f');text(0.6,88,'满载');text(0.8,90,'E_r');text(0.7,65,'空载');text(0.72,72,'E_r');程序运行结果如下:图1图2 5.11L=3.048;K=0.0024;i=20;ua=0:0.01:120;f=1/L.*(1./(3.6./ua+K.*ua./3.6));syms uF(u)=(1/L.*(1./(1./u+K.*u)))./i;plot(ua,f,'b-');xlabel('u_a(km/h)');ylabel('\omega_r/\delta)_s');F(22.35)运行结果:ans=0.1667386094155036.2f=0.1:0.1:100;Gq1=5.12*10^(-5)./f.^2;Gq2=2.02*10^(-3).*f./f;Gq3=7.98*10^(-2).*f.^2;figure(1);loglog(f,Gq1,'b-');box off;axis square;title('位移功率谱密度'); xlabel('f/Hz');ylabel('G_q(f)/(m^2s)');figure(2);loglog(f,Gq2,'b-');box off;axis square;title('速度功率谱密度'); xlabel('f/Hz');ylabel('G_q_''(f)/(m^2/s)');figure(3);loglog(f,Gq3,'b-');box off;axis square;title('加速度功率谱密度'); xlabel('f/Hz');ylabel('G_q_''_''(f)/(m^2/s^3)');运行结果如下:6.4f1=0.1:0.01:1;f2=1:0.01:10;G1=0.010106.*f1.^2;G2=0.010106.*f2./f2;loglog(f1,G1,'b-');hold onloglog(f2,G2,'b-');title('车身加速度的功率谱密度'); xlabel('f/Hz');ylabel('G_z_''_''(f)/m^-^1'); axis([0.1,10,0.0001,0.1]);运行结果如下:6.51.计算说明1)①幅频特性()122222114z q λζλγ⎡⎤-+⎢=⎢⎥∆⎣⎦,其中0ωλω=,()2222222111141λλγζλγλμμ⎡⎤⎡⎤⎛⎫⎛⎫∆=-+--+-⎢⎥⎢⎥ ⎪ ⎪⎝⎭⎝⎭⎣⎦⎣⎦;()12222222211414z z ζλλζλ⎡⎤+⎢=⎢⎥-+⎣⎦;()1222222221414s s s s s p z ζλλζλ⎡⎤+⎢=⎢⎥-+⎣⎦,其中s s ωλω=;②均方根谱()()221~j 2z q H f f ωππ=;()()222~j 2z qH f f ωππ== ;()()2221~1j 2p qz z H f f z qωππ== ;③其他值()0.5360q q G f df σ⎡⎤=⎢⎥⎣⎦⎰ ,()0.536110z z G f df σ⎡⎤=⎢⎥⎣⎦⎰ ,()0.536220z z G f df σ⎡⎤=⎢⎥⎣⎦⎰ ,()0.5360a a G f df σ⎡⎤=⎢⎥⎣⎦⎰()()()()()()13622w 012222412.5362202412.5d 12.5 0.5d d 1d d 4a a a a a a W f G f f f G f f G f f G f f G f f f ⎡⎤=⎢⎥⎣⎦⎡⎤⎛⎫⎛⎫=+++⎢⎥ ⎪ ⎪⎝⎭⎢⎥⎝⎭⎣⎦⎰⎰⎰⎰⎰其中,()()()()()0.5 0.52 2441 412.512.512.536f f f W f f f f <<⎧⎪⎪<<⎪=⎨<<⎪⎪<<⎪⎩()aw w 020lg L a =2)见1)中计算式3)()()()22004q q q G f G G n n uωπ== ()()()1122363622d ~00d d dd f q q f q f H f G f f G f f q σ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎰⎰ ,其中122d 12f q f γλπ⎡⎤=⎢⎥∆⎣⎦ ()()()1122363622d //~00d d dd F Gq q F G q F H f G f f G f f Gq σ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎰⎰ ,其中122222d 1412F f Gq g λζλμπγ⎡⎤⎛⎫-+⎢⎥⎪+⎢⎥⎝⎭=⎢⎥∆⎢⎥⎢⎥⎣⎦其余见1)中计算式2.程序清单1)f0=1.5;zeta=0.25;gamma=9;mu=10;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega0=2*pi*f0;omega_s=2*pi*fs;lambda=omega./omega0;lambda_s=omega./omega_s;%计算并绘制幅频特性delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;p_z2=((1+(2*zeta_s.*lambda_s).^2)./((1-lambda_s.^2).^2+(2*zeta_s.*...lambda_s).^2)).^0.5;figure(1)loglog(f,z1_q,'b-',0:0.1:100,(0:0.1:100)./(0:0.1:100),'g-');axis([0.1,100,0.1,10]);grid on ;title('z_1~q 的幅频特性');xlabel('激振频率f/Hz');ylabel('$$|\frac{z_1}{q}|$$','Interpreter','latex');gtext('0:1');figure(2)loglog(f,z2_z1,'b-',0:0.1:1,(0:0.1:1)./(0:0.1:1),'g-',1:0.1:100,1./...(1:0.1:100),'g-');axis([0.1,100,0.01,10]);grid on;title('z_2~z_1的幅频特性');xlabel('激振频率f/Hz');ylabel('$$|\frac{z_2}{z_1}|$$','Interpreter','latex'); gtext('0:1');gtext('-1:1');figure(3)loglog(f,p_z2,'b-');axis([0.1,100,0.01,10]);grid on;title('p~z_2的幅频特性');xlabel('激振频率f/Hz');ylabel('$$|\frac{p}{z_2}|$$','Interpreter','latex');%计算并绘制均方根谱sqrt_Gq=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u);sqrt_Gz1=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z1_q;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sqrt_Ga=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*p_z2.*z2_z1.*z1_q; figure(4)loglog(f,sqrt_Gz1,'b-');grid on;title('车轮位移均方根谱');xlabel('激振频率f/Hz');ylabel('$\sqrt{G_{z''''1}(f)}$','Interpreter','latex'); figure(5)loglog(f,sqrt_Gz2,'b-');grid on;title('车身位移均方根谱');xlabel('激振频率f/Hz');ylabel('$\sqrt{G_{z''''2}(f)}$','Interpreter','latex'); figure(6)loglog(f,sqrt_Ga,'b-');grid on;title('传至人体的位移均方根谱');xlabel('激振频率f/Hz');ylabel('$\sqrt{G_a(f)}$','Interpreter','latex');%计算其它值sigma_q=sqrt(trapz(f,sqrt_Gq.^2));%路面不平度加速度均方根值sigma_z1=sqrt(trapz(f,sqrt_Gz1.^2));%车轮加速度均方根值sigma_z2=sqrt(trapz(f,sqrt_Gz2.^2));%车身加速度均方根值sigma_a=sqrt(trapz(f,sqrt_Ga.^2));%传至人体的加速度均方根值for i=1:Nif f(i)<=2W(i)=0.5;elseif f(i)<=4W(i)=f(i)/4;elseif f(i)<=12.5W(i)=1;elseW(i)=12.5/f(i);endendaw=sqrt(trapz(f,W.^2.*sqrt_Ga.^2));%加权加速度均方根值a0=10^(-6);Law=20*log10(aw/a0);%加权振级format shortdisp('路面不平度加速度均方根值=');disp(sigma_q);disp('车轮加速度均方根值=');disp(sigma_z1);disp('车身加速度均方根值=');disp(sigma_z2);disp('传至人体的加速度均方根值=');disp(sigma_a);disp('加权加速度均方根值=');disp(aw);disp('加权振级=');disp(Law);2)%随fs变化f0=1.5;zeta=0.25;gamma=9;mu=10;fs=1.5:0.01:6;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega0=2*pi*f0;lambda=omega./omega0;for i=1:length(fs)omega_s=2*pi.*fs(i);lambda_s=omega./omega_s;delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;p_z2=((1+(2*zeta_s.*lambda_s).^2)./((1-lambda_s.^2).^2+(2*zeta_s.*...lambda_s).^2)).^0.5;sqrt_Gq=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u);sqrt_Gz1=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z1_q;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sqrt_Ga=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*p_z2.*z2_z1.*z1_q;for j=1:Nif f(j)<=2W(j)=0.5;elseif f(j)<=4W(j)=f(j)/4;elseif f(j)<=12.5W(j)=1;elseW(j)=12.5/f(j);endendaw(i)=sqrt(trapz(f,W.^2.*sqrt_Ga.^2));enda0=10^(-6);Law=20*log10(aw/a0);figure(1)plot(fs,aw);grid ontitle('a_w随f_s的变化曲线');xlabel('f_s/Hz');ylabel('a_w/m·s^-^2');figure(2)plot(fs,Law);grid ontitle('L_aw随f_s的变化曲线');xlabel('f_s/Hz');ylabel('L_a_w/dB');%随zeta_s变化f0=1.5;zeta=0.25;gamma=9;mu=10;fs=3;zeta_ss=0.125:0.001:0.5;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega0=2*pi*f0;omega_s=2*pi.*fs;lambda=omega./omega0;lambda_s=omega./omega_s;for i=1:length(zeta_ss)zeta_s=zeta_ss(i);delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;p_z2=((1+(2*zeta_s.*lambda_s).^2)./((1-lambda_s.^2).^2+(2*zeta_s.*...lambda_s).^2)).^0.5;sqrt_Gq=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u);sqrt_Gz1=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z1_q;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sqrt_Ga=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*p_z2.*z2_z1.*z1_q;for j=1:Nif f(j)<=2W(j)=0.5;elseif f(j)<=4W(j)=f(j)/4;elseif f(j)<=12.5W(j)=1;elseW(j)=12.5/f(j);endendaw(i)=sqrt(trapz(f,W.^2.*sqrt_Ga.^2));enda0=10^(-6);Law=20*log10(aw/a0);figure(1)plot(zeta_ss,aw);grid ontitle('a_w随\zeta_s的变化曲线');xlabel('\zeta_s');ylabel('a_w/m·s^-^2');figure(2)plot(zeta_ss,Law);grid ontitle('L_aw随\zeta_s的变化曲线');xlabel('\zeta_s');ylabel('L_a_w/dB');3)%随f0变化f0=0.25:0.01:3;zeta=0.25;gamma=9;mu=10;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega_s=2*pi*fs;lambda_s=omega./omega_s;Gq_f=4*pi^2*Gq_n0*n0^2*u;g=9.8;for i=1:length(f0)omega0=2*pi*f0(i);lambda=omega./omega0;delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sigma_z2(i)=sqrt(trapz(f,sqrt_Gz2.^2));fd_q=gamma*lambda.^2./(2*pi.*f).*(1./delta).^0.5;sigma_fd(i)=sqrt(trapz(f,Gq_f.*fd_q.^2));Fd_Gq=2*pi.*f.*gamma./g.*(((lambda.^2./(1+mu)-1).^2+4*zeta.^2*lambda.^2)..../delta).^0.5;sigma_FdG(i)=sqrt(trapz(f,Gq_f.*Fd_Gq.^2));endm=find(f0==1.5);sgm_z2=sigma_z2(m);sgm_fd=sigma_fd(m);sgm_FdG=sigma_FdG(m);sm_z2=20*log10(sigma_z2/sgm_z2);sm_fd=20*log10(sigma_fd/sgm_fd);sm_FdG=20*log10(sigma_FdG/sgm_FdG);plot(f0,sm_z2,f0,sm_fd,f0,sm_FdG);axis([0.25,3,-25,10]);grid on;title('各响应量均方根值随f_0变化的曲线');xlabel('f_0/Hz');ylabel('\sigma_z_''_''_2,\sigma_f_d,\sigma_F_d_/_G/dB'); legend('\sigma_z_''_''_2','\sigma_f_d','\sigma_F_d_/_G');legend('Location','southeast');%随zeta变化f0=1.5;zeta0=0.125:0.001:0.5;gamma=9;mu=10;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega_s=2*pi*fs;omega0=2*pi*f0;lambda_s=omega./omega_s;lambda=omega./omega0;Gq_f=4*pi^2*Gq_n0*n0^2*u;g=9.8;for i=1:length(zeta0)zeta=zeta0(i);delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sigma_z2(i)=sqrt(trapz(f,sqrt_Gz2.^2));fd_q=gamma*lambda.^2./(2*pi.*f).*(1./delta).^0.5;sigma_fd(i)=sqrt(trapz(f,Gq_f.*fd_q.^2));Fd_Gq=2*pi.*f.*gamma./g.*(((lambda.^2./(1+mu)-1).^2+4*zeta.^2*lambda.^2)..../delta).^0.5;sigma_FdG(i)=sqrt(trapz(f,Gq_f.*Fd_Gq.^2));endm=find(zeta0==0.25);sgm_z2=sigma_z2(m);sgm_fd=sigma_fd(m);sgm_FdG=sigma_FdG(m);sm_z2=20*log10(sigma_z2/sgm_z2);sm_fd=20*log10(sigma_fd/sgm_fd);sm_FdG=20*log10(sigma_FdG/sgm_FdG);plot(zeta0,sm_z2,zeta0,sm_fd,zeta0,sm_FdG);axis([0.125,0.5,-4,4]);grid on;title('各响应量均方根值随\zeta变化的曲线');xlabel('\zeta');ylabel('\sigma_z_''_''_2,\sigma_f_d,\sigma_F_d_/_G/dB'); legend('\sigma_z_''_''_2','\sigma_f_d','\sigma_F_d_/_G');%随gamma变化f0=1.5;zeta=0.25;gamma0=4.5:0.1:18;mu=10;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega_s=2*pi*fs;omega0=2*pi*f0;lambda_s=omega./omega_s;lambda=omega./omega0;Gq_f=4*pi^2*Gq_n0*n0^2*u;g=9.8;for i=1:length(gamma0)gamma=gamma0(i);delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sigma_z2(i)=sqrt(trapz(f,sqrt_Gz2.^2));fd_q=gamma*lambda.^2./(2*pi.*f).*(1./delta).^0.5;sigma_fd(i)=sqrt(trapz(f,Gq_f.*fd_q.^2));Fd_Gq=2*pi.*f.*gamma./g.*(((lambda.^2./(1+mu)-1).^2+4*zeta.^2*lambda.^2)..../delta).^0.5;sigma_FdG(i)=sqrt(trapz(f,Gq_f.*Fd_Gq.^2));endm=find(gamma0==9);sgm_z2=sigma_z2(m);sgm_fd=sigma_fd(m);sgm_FdG=sigma_FdG(m);sm_z2=20*log10(sigma_z2/sgm_z2);sm_fd=20*log10(sigma_fd/sgm_fd);sm_FdG=20*log10(sigma_FdG/sgm_FdG);plot(gamma0,sm_z2,gamma0,sm_fd,gamma0,sm_FdG);axis([4.5,18,-6,6]);grid on;title('各响应量均方根值随\gamma变化的曲线');xlabel('\gamma');ylabel('\sigma_z_''_''_2,\sigma_f_d,\sigma_F_d_/_G/dB'); legend('\sigma_z_''_''_2','\sigma_f_d','\sigma_F_d_/_G');legend('Location','southeast');%随mu变化f0=1.5;zeta=0.25;gamma=9;mu0=5:0.1:20;fs=3;zeta_s=0.25;u=20;Gq_n0=2.56*10^(-8);n0=0.1;delta_f=0.2;N=180;f=delta_f*[1:N];omega=2*pi*f;omega_s=2*pi*fs;omega0=2*pi*f0;lambda_s=omega./omega_s;lambda=omega./omega0;Gq_f=4*pi^2*Gq_n0*n0^2*u;g=9.8;for i=1:length(mu0)mu=mu0(i);delta=((1-lambda.^2).*(1+gamma-1./mu.*lambda.^2)-1).^2+4*zeta^2.*lambda.^...2.*(gamma-(1./mu+1).*lambda.^2).^2;z1_q=gamma.*(((1-lambda.^2).^2+4*zeta.^2.*lambda.^2)./delta).^0.5;z2_z1=((1+4*zeta.^2.*lambda.^2)./((1-lambda.^2).^2+4*zeta.^2.*lambda.^2))....^0.5;sqrt_Gz2=4*pi^2.*f.*sqrt(Gq_n0*n0^2*u).*z2_z1.*z1_q;sigma_z2(i)=sqrt(trapz(f,sqrt_Gz2.^2));fd_q=gamma*lambda.^2./(2*pi.*f).*(1./delta).^0.5;sigma_fd(i)=sqrt(trapz(f,Gq_f.*fd_q.^2));Fd_Gq=2*pi.*f.*gamma./g.*(((lambda.^2./(1+mu)-1).^2+4*zeta.^2*lambda.^2)..../delta).^0.5;sigma_FdG(i)=sqrt(trapz(f,Gq_f.*Fd_Gq.^2));endm=find(mu0==10);sgm_z2=sigma_z2(m);sgm_fd=sigma_fd(m);sgm_FdG=sigma_FdG(m);sm_z2=20*log10(sigma_z2/sgm_z2);sm_fd=20*log10(sigma_fd/sgm_fd);sm_FdG=20*log10(sigma_FdG/sgm_FdG);plot(mu0,sm_z2,mu0,sm_fd,mu0,sm_FdG);axis([5,20,-2,2]);grid on;title('各响应量均方根值随\mu变化的曲线');xlabel('\mu');ylabel('\sigma_z_''_''_2,\sigma_f_d,\sigma_F_d_/_G/dB');legend('\sigma_z_''_''_2','\sigma_f_d','\sigma_F_d_/_G');3.结果分析1)路面不平度加速度均方根值=0.3523车轮加速度均方根值=0.2391车身加速度均方根值=0.0168传至人体的加速度均方根值=0.0161加权加速度均方根值=0.0100加权振级=80.0287分析:根据课本中表6-2,a w=0.0100<0.315,L aw=80.0287<110,故乘客没有不舒适。
汽车理论习题Matlab程序
1、3确定一轻型货车得动力性能(货车可装用4挡或5挡变速器,任选其中得一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应得附着率.3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h得车速—时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h得加速时间。
轻型货车得有关数据:汽油发动机使用外特性得Tq-n曲线得拟合公式为式中,Tq为发动机转矩(N•m);n为发动机转速(r/min)。
发动机得最低转速n min=600r/min,最高转速n max=4000r/min。
装载质量2000kg整车整备质量1800kg总质量3880kg车轮半径0、367m传动系机械效率ηt=0、85滚动阻力系数f=0、013空气阻力系数×迎风面积C DA=2、77m2主减速器传动比i0=5、83飞轮转动惯量If=0、218kg•m2二前轮转动惯量Iw1=1、798kg•m2四后轮转动惯量I w2=3、598kg•m 2变速器传动比ig(数据如下表)轴距L=3、2m质心至前轴距离(满载)a=1、974m质心高(满载)hg=0、9m解:Matlab程序:(1) 求汽车驱动力与行驶阻力平衡图与汽车最高车速程序:n=[600:10:4000];Tq=-19、313+295、27*(n/1000)-165、44*(n/1000)、^2+40、874*(n/1000)、^3-3、8445*(n/1000)、^4;m=3880;g=9、8;nmin=600;nmax=4000;G=m*g;ig=[5、56 2、769 1、644 1、00 0、793];nT=0、85;r=0、367;f=0、013;CDA=2、77;i0=5、83;L=3、2;a=1、947;hg=0、9;If=0、218;Iw1=1、798;Iw2=3、598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0、377*r*n/ig(1)/i0;ua2=0、377*r*n/ig(2)/i0;ua3=0、377*r*n/ig(3)/i0;ua4=0、377*r*n/ig(4)/i0;ua5=0、377*r*n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua、^2/21、15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext(’Ft2'),gtext(’Ft3'),gtext('Ft4'),gtext('Ft5'),gtext(’Ff+Fw’);zoomon;[x,y]=ginput(1);zoom off;disp('汽车最高车速=’);disp(x);disp(’km/h’);汽车最高车速=99、3006km/h(2)求汽车最大爬坡度程序:n=[600:10:4000];Tq=—19、313+295、27*(n/1000)—165、44*(n/1000)、^2+40、874*(n/1000)、^3-3、8445*(n/1000)、^4;m=3880;g=9、8;nmin=600;nmax=4000;G=m*g;ig=[5、562、7691、6441、00 0、793];nT=0、85;r=0、367;f=0、013;CDA=2、77;i0=5、83;L=3、2;a=1、947;hg=0、9;If=0、218;Iw1=1、798;Iw2=3、598;Ft1=Tq*ig(1)*i0*nT/r;ua1=0、377*r*n/ig(1)/i0;Ff=G*f;Fw1=CDA*ua1、^2/21、15;Fz1=Ff+Fw1;Fi1=Ft1—Fz1;Zoomon;imax=100*tan(asin(max(Fi1/G)));disp('汽车最大爬坡度=’);disp(imax);disp(’%’);汽车最大爬坡度=35、2197%(3)求最大爬坡度相应得附着率与求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19、313+295、27*(n/1000)-165、44*(n/1000)、^2+40、874*(n/1000)、^3-3、8445*(n/1000)、^4;m=3880;g=9、8;nmin=600;nmax=4000;G=m*g;ig=[5、56 2、7691、644 1、00 0、793];nT=0、85;r=0、367;f=0、013;CDA=2、77;i0=5、83;L=3、2;a=1、947;hg=0、9;If=0、218;Iw1=1、798;Iw2=3、598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0、377*r*n/ig(1)/i0;ua2=0、377*r*n/ig(2)/i0;ua3=0、377*r*n/ig(3)/i0;ua4=0、377*r*n/ig(4)/i0;ua5=0、377*r*n/ig(5)/i0;Fw1=CDA*ua1、^2/21、15;Fw2=CDA*ua2、^2/21、15;Fw3=CDA*ua3、^2/21、15;Fw4=CDA*ua4、^2/21、15;Fw5=CDA*ua5、^2/21、15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*r^2)+(If*ig(1)^2*i0^2*nT)/(m*r^2); deta2=1+(Iw1+Iw2)/(m*r^2)+(If*ig(2)^2*i0^2*nT)/(m*r^2);deta3=1+(Iw1+Iw2)/(m*r^2)+(If*ig(3)^2*i0^2*nT)/(m*r^2); deta4=1+(Iw1+Iw2)/(m*r^2)+(If*ig(4)^2*i0^2*nT)/(m*r^2);deta5=1+(Iw1+Iw2)/(m*r^2)+(If*ig(5)^2*i0^2*nT)/(m*r^2);a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1、/a1;a2=(Ft2-Ff—Fw2)/(deta2*m);ad2=1、/a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1、/a3;a4=(Ft4-Ff—Fw4)/(deta4*m);ad4=1、/a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1、/a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([099 010]);title('汽车得加速度倒数曲线');xlabel('ua(km/h)’);ylabel('1/a');gtext('1/a1');gtext('1/a2’);gtext(’1/a3');gtext('1/a4');gtext('1/a5');a=max(a1);af=asin(max(Ft1—Ff—Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp(’假设后轮驱动,最大爬坡度相应得附着率=');disp(C);假设后轮驱动,最大爬坡度相应得附着率=0、4219(4) >>clearnT=0、85;r=0、367;f=0、013;CDA=2、77;i0=5、83;If=0、218;Iw1=1、798;Iw2=3、598;L=3、2;a=1、947;hg=0、9;m=3880;g=9、8;G=m*g;ig=[5、56 2、7691、644 1、00 0、793];nmin=600;nmax=4000;u1=0、377*r*nmin、/ig/i0;u2=0、377*r*nmax、/ig/i0;deta=0*ig;fori=1:5deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nT)/(m*r^2);endua=[6:0、01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;d elta=0*ua;Ff=G*f;Fw=CDA*ua、^2/21、15;for i=1:Nk=i;ifua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0、377;Tq=-19、313+295、27*(n/1000)-165、44*(n/1000)^2+40、874*(n/1000)^3—3、8445*(n/1000)^4;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff—Fw(i));delta(i)=0、01*inv_a(i)/3、6;elseifua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0、377;Tq=—19、313+295、27*(n/1000)—165、44*(n/1000)^2+40、874*(n/1000)^3-3、8445*(n/1000)^4;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft—Ff-Fw(i));delta(i)=0、01*inv_a(i)/3、6;elseif ua(i)〈=u2(4)n=ua(i)*(ig(4)*i0/r)/0、377;Tq=—19、313+295、27*(n/1000)—165、44*(n/1000)^2+40、874*(n/1000)^3-3、8445*(n/1000)^4;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0、01*inv_a(i)/3、6;elsen=ua(i)*(ig(5)*i0/r)/0、377;Tq=-19、313+295、27*(n/1000)-165、44*(n/1000)^2+40、874*(n/1000)^3-3、8445*(n/1000)^4;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff—Fw(i));delta(i)=0、01*inv_a(i)/3、6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([080 0100]);title('汽车2档原地起步换挡加速时间曲线’);xlabel(’时间t(s)’);ylabel(’速度ua(km/h)');>〉ginputans =25、8223 70、073725、746770、0737所以汽车2档原地起步换挡加速行驶至70km/h得加速时间约为25、8s2、7已知货车装用汽油发动机得负荷特性与万有特性。
[交通运输]汽车理论课后习题Matlab程序
![[交通运输]汽车理论课后习题Matlab程序](https://img.taocdn.com/s3/m/6f84f31d50e2524de4187e64.png)
1.3 确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选 其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h 的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h 的加速时间。
轻型货车的有关数据:汽油发动机使用外特性的Tq-n 曲线的拟合公式为23419.313295.27()165.44()40.874() 3.8445()1000100010001000q n n n n T =-+-+- 式中,Tq 为发动机转矩(N •m );n 为发动机转速(r/min )。
发动机的最低转速n min =600r/min,最高转速n max =4000r/min 。
装载质量 2000kg整车整备质量 1800kg总质量 3880kg车轮半径 0.367m传动系机械效率 ηt =0.85滚动阻力系数 f =0.013空气阻力系数×迎风面积 C D A =2.77m 2主减速器传动比 i 0=5.83飞轮转动惯量 I f =0.218kg•m 2二前轮转动惯量 I w1=1.798kg•m 2四后轮转动惯量 I w2=3.598kg•m 2质心至前轴距离(满载) a=1.974m质心高(满载) hg=0.9m解:Matlab 程序:(1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua.^2/21.15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw'); zoom on;[x,y]=ginput(1);zoom off;disp('汽车最高车速=');disp(x);disp('km/h');汽车最高车速=99.3006km/h(2)求汽车最大爬坡度程序:n=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;Ff=G*f;Fw1=CDA*ua1.^2/21.15;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100*tan(asin(max(Fi1/G)));disp('汽车最大爬坡度=');disp(imax);disp('%');汽车最大爬坡度=35.2197%(3)求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/10 00).^4;m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598;Ft1=Tq*ig(1)*i0*nT/r;Ft2=Tq*ig(2)*i0*nT/r;Ft3=Tq*ig(3)*i0*nT/r;Ft4=Tq*ig(4)*i0*nT/r;Ft5=Tq*ig(5)*i0*nT/r;ua1=0.377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0.377*r*n/ig(5)/i0;Fw1=CDA*ua1.^2/21.15;Fw2=CDA*ua2.^2/21.15;Fw3=CDA*ua3.^2/21.15;Fw4=CDA*ua4.^2/21.15;Fw5=CDA*ua5.^2/21.15;Ff=G*f;deta1=1+(Iw1+Iw2)/(m*r^2)+(If*ig(1)^2*i0^2*nT)/(m*r^2); deta2=1+(Iw1+Iw2)/(m*r^2)+(If*ig(2)^2*i0^2*nT)/(m*r^2); deta3=1+(Iw1+Iw2)/(m*r^2)+(If*ig(3)^2*i0^2*nT)/(m*r^2); deta4=1+(Iw1+Iw2)/(m*r^2)+(If*ig(4)^2*i0^2*nT)/(m*r^2); deta5=1+(Iw1+Iw2)/(m*r^2)+(If*ig(5)^2*i0^2*nT)/(m*r^2); a1=(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([0 99 0 10]);title('汽车的加速度倒数曲线');xlabel('ua(km/h)');ylabel('1/a');gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5'); a=max(a1);af=asin(max(Ft1-Ff-Fw1)/G);C=tan(af)/(a/L+hg*tan(af)/L);disp('假设后轮驱动,最大爬坡度相应的附着率=');disp(C);假设后轮驱动,最大爬坡度相应的附着率=0.4219(4) >>clearnT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;If=0.218;Iw1=1.798;Iw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8;G=m*g; ig=[5.56 2.769 1.644 1.00 0.793];nmin=600;nmax=4000;u1=0.377*r*nmin./ig/i0;u2=0.377*r*nmax./ig/i0;deta=0*ig;for i=1:5deta(i)=1+(Iw1+Iw2)/(m*r^2)+(If*(ig(i))^2*i0^2*nT)/(m*r^2);endua=[6:0.01:99];N=length(ua);n=0;Tq=0;Ft=0;inv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.^2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig(2)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(2)*i0*nT/r;inv_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(3)*i0*nT/r;inv_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elseif ua(i)<=u2(4)n=ua(i)*(ig(4)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/100 0)^4;Ft=Tq*ig(4)*i0*nT/r;inv_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;elsen=ua(i)*(ig(5)*i0/r)/0.377;Tq=-19.313+295.27*(n/1000)-165.44*(n/1000)^2+40.874*(n/1000)^3-3.8445*(n/1000)^4;Ft=Tq*ig(5)*i0*nT/r;inv_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*inv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);endplot(t,ua);axis([0 80 0 100]);title('汽车2档原地起步换挡加速时间曲线');xlabel('时间t (s )');ylabel('速度ua (km/h )');>> ginputans =25.8223 70.073725.7467 70.0737所以汽车2档原地起步换挡加速行驶至70km/h 的加速时间约为25.8s2.7已知货车装用汽油发动机的负荷特性与万有特性。
汽车理论课后作业matlab编程详解(带注释)【范本模板】

1。
3matlab程序:(1)%驱动力—行驶阻力平衡图%货车相关参数.m=3880;g=9.8;nmin=600;nmax=4000;G=m*g;ig=[5。
56 2。
769 1.644 1。
00 0.793];y=0。
85;r=0。
367;f=0。
013;CdA=2。
77;i0=5。
83;L=3。
2;a=1。
947;hg=0。
9;If=0.218;Iw1=1.798;Iw2=3.598;n=600:10:4000;%发动机转数转换成汽车行驶速度。
ua1=0。
377*r*n/ig(1)/i0;ua2=0.377*r*n/ig(2)/i0;ua3=0.377*r*n/ig(3)/i0;ua4=0.377*r*n/ig(4)/i0;ua5=0。
377*r*n/ig(5)/i0;%计算各档位驱动力。
Tq=-19。
313+295.27*(n/1000)-165.44*(n/1000)。
^2+40。
874*(n/1000)。
^3—3.8445*(n/1000).^4;Ft1=Tq*ig(1)*i0*y/r;Ft2=Tq*ig(2)*i0*y/r;Ft3=Tq*ig(3)*i0*y/r;Ft4=Tq*ig(4)*i0*y/r;Ft5=Tq*ig(5)*i0*y/r;%计算行驶阻力。
Fz1=m*g*f+2.77*ua1.^2/21。
15;Fz2=m*g*f+2.77*ua2。
^2/21。
15;Fz3=m*g*f+2.77*ua3.^2/21。
15;Fz4=m*g*f+2。
77*ua4.^2/21。
15;Fz5=m*g*f+2。
77*ua5.^2/21.15;%驱动力—行驶阻力平衡图.plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua1,Fz1,’k',ua2,Fz2,’k’,ua3,Fz3,'k',ua4,Fz4,'k',ua5,Fz5,'k');title(’驱动力-行驶阻力平衡图');xlabel(’ua(km/s)’);ylabel('Ft(N)’);legend(’Ft1’,’Ft2','Ft3','Ft4’,’Ft5’,’Ff+Fw')%求最高车速。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.3确定一轻型货车的动力性能(货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算):1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率。
3)绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速一时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间。
轻型货车的有关数据:汽油发动机使用外特性的Tq-n曲线的拟合公式为一19.313 295.27(金)一165・44(金)2 4°.874侖)3一3・8445式中,Tq为发动机转矩(N?m);n为发动机转速(r/min )。
发动机的最低转速n min=600r/min,最咼转速r max=4000r/min。
装载质量2000kg整车整备质量1800kg总质量3880kg车轮半径0.367m传动系机械效率n=0.85滚动阻力系数f=0.013空气阻力系数X迎风面积C D A=2.77m2主减速器传动比i0=5.83飞轮转动惯量 2|f=0.218kg?m一前轮转动惯量I w1=1.798kg?m四后轮转动惯量I w2=3.598kg?m变速器传动比ig(数据如下表)轴距L=3.2m质心至前轴距离(满载)a=1.974m 质心高(满载)hg=0.9m解:Matlab程序:(1)求汽车驱动力与行驶阻力平衡图和汽车最高车速程序:n=[600:10:4000];Tq=-19.313+295.27*( n/1000)-165.44*(门/1000)八2+40.874*(门/1000)八3- 3.8445*( n/1000).A4;m=3880;g=9.8; nmi n=600; nm ax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;lf=0.218;lw1= 1.798;lw2=3.598;Ft仁Tq*ig(1)*i0* nT/r;Ft2=Tq*ig(2)*i0* nT/r;Ft3=Tq*ig(3)*i0* nT/r;Ft4=Tq*ig(4)*i0* nT/r;Ft5=Tq*ig(5)*i0* nT/r;ua1=0.377*r* n/ig(1)/i0;ua2=0.377*r* n/ig(2)/i0;ua3=0.377*r* n/ig(3)/i0; ua4=0.377*r* n/ig(4)/i0;ua5=0.377*r* n/ig(5)/i0;ua=[0:5:120];Ff=G*f;Fw=CDA*ua.A2/21.15;Fz=Ff+Fw;plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz);title('驱动力-行驶阻力平衡图');xlabel('ua(km/s)');ylabel('Ft(N)');gtext('Ft1'),gtext('Ft2'),gtext('Ft3'),gtext('Ft4'),gtext('Ft5'),gtext('Ff+Fw'); zoom on; [x,y]=gi nput(1);zoom off;disp(汽车最高车速=');disp(x);disp('km/h');汽车最高车速=99.3006km/h(2)求汽车最大爬坡度程序:n=[600:10:4000];Tq=-19.313+295.27*( n/1000)-165.44*(门/1000)八2+40.874*(门/1000)八3- 3.8445*( n/1000).A4;m=3880;g=9.8; nmi n=600; nm ax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;lf=0.218;lw1= 1.798;lw2=3.598;Ft仁Tq*ig(1)*i0* nT/r;ua1=0.377*r* n/ig(1)/i0;Ff=G*f;Fw仁CDA*ua"2/21.15;Fz仁Ff+Fw1;Fi1= Ft1-Fz1;Zoom on;imax=100*ta n(asi n(max(Fi1/G)));disp(汽车最大爬坡度=');disp(imax);disp('%');汽车最大爬坡度=35.2197%(3)求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=[600:10:4000];Tq=-19.313+295.27*( n/1000)-165.44*(门/1000)八2+40.874*(门/1000)八3-3.8445*( n/1000).A4;m=3880;g=9.8; nmi n=600; nm ax=4000;G=m*g;ig=[5.56 2.769 1.644 1.00 0.793];nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;L=3.2;a=1.947;hg=0.9;lf=0.218;lw1= 1.798;Iw2=3.598;Ft仁Tq*ig(1)*i0* nT/r;Ft2=Tq*ig(2)*i0* nT/r;Ft3=Tq*ig(3)*i0* nT/r;Ft4=Tq*ig(4)*i0* nT/r;Ft5=Tq*ig(5)*iO* nT/r;ua1=0.377*r* n/ig(1)/iO;ua2=0.377*r* n/ig(2)/iO;ua3=0.377*r* n/ig(3)/iO;ua4=0.377*r* n/ig(4)/i0;ua5=0.377*r* n/ig(5)/i0;Fw1=CDA*ua1.A2/21.15;Fw2=CDA*ua2.A2/21.15;Fw3=CDA*ua3.A2/21.15;Fw4=CDA*ua4.A2/21.15;Fw5=CDA*ua5.A2/21.15;Ff=G*f;deta1=1+(lw1+lw2)/(m*rA2)+(lf*ig⑴八2*心八2* nT)/(m*「A2); deta2=1+(lw1+lw2)/(m*rA2)+(lf*ig (2)八2诃2* nT)/(m*「A2); deta3=1+(lw1+lw2)/(m*rA2)+(lf*ig(3)A2*i0A2* nT)/(m*「A2);deta4=1+(lw1+lw2)/(m*rA2)+(lf*ig ⑷八2*心八2* nT)/(m*「A2);deta5=1+(lw1+lw2)/(m*rA2)+(lf*ig(5)A2*i0A2* nT)/(m*「A2);a仁(Ft1-Ff-Fw1)/(deta1*m);ad1=1./a1;a2=(Ft2-Ff-Fw2)/(deta2*m);ad2=1./a2;a3=(Ft3-Ff-Fw3)/(deta3*m);ad3=1./a3;a4=(Ft4-Ff-Fw4)/(deta4*m);ad4=1./a4;a5=(Ft5-Ff-Fw5)/(deta5*m);ad5=1./a5;Plot(ua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5);axis([O 99 010]);title('汽车的加速度倒数曲线');xlabel('ua(km/h)');ylabel('1/a');gtext('1/a1');gtext('1/a2');gtext('1/a3');gtext('1/a4');gtext('1/a5'); a=max(a1);af=asi n(max(Ft1-Ff-Fw1)/G);C=ta n(af)/(a/ L+hg*ta n(af)/L);disp(假设后轮驱动,最大爬坡度相应的附着率=');disp(C);假设后轮驱动,最大爬坡度相应的附着率=0.4219(4) >>clear nT=0.85;r=0.367;f=0.013;CDA=2.77;i0=5.83;lf=0.218;Iw1= 1.798;lw2=3.598;L=3.2;a=1.947;hg=0.9;m=3880;g=9.8;G=m*g; ig=[5.56 2.7691.6441.00 0.793];nmin=600;nm ax=4000;u1=0.377*r* nmin ./ig/i0;u2=0.377*r* nm ax./ig/i0;deta=0*ig;for i=1:5deta(i)=1+(Iw1+Iw2)/(m*r A2)+(If*(ig(i))A2*i0A2* nT)/(m*r A2);endua=[6:0.01:99];N=le ngth(ua); n=0;Tq=0;Ft=0;i nv_a=0*ua;delta=0*ua;Ff=G*f;Fw=CDA*ua.A2/21.15;for i=1:Nk=i;if ua(i)<=u2(2)n=ua(i)*(ig (2)*i0/r)/0.377;Tq=-19.313+295.27*( n/1000)-165.44*( n/1000F2+40.874*( n/1000F3- 3.8445*( n/1000)A4;Ft=Tq*ig(2)*i0* nT/r;in v_a(i)=(deta(2)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*i nv_a(i)/3.6;elseif ua(i)<=u2 (3)n=ua(i)*(ig(3)*i0/r)/0.377;Tq=-19.313+295.27*( n/1000)-165.44*( n/1000F2+40.874*( n/1000F3- 3.8445*( n/1000)A4;Ft=Tq*ig(3)*i0* nT/r;in v_a(i)=(deta(3)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*i nv_a(i)/3.6;elseif ua(i)<=u2 (4)n=ua(i)*(ig ⑷ *i0/r)/0.377;Tq=-19.313+295.27*( n/1000)-165.44*( n/1000F2+40.874*( n/1000F3- 3.8445*( n/1000)A4;Ft=Tq*ig(4)*i0* nT/r;in v_a(i)=(deta(4)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*i nv_a(i)/3.6;elsen=ua(i)*(ig (5)*i0/r)/0.377;Tq=-19.313+295.27*( n/1000)-165.44*( n/1000F2+40.874*( n/1000F3- 3.8445*( n/1000)A4;Ft=Tq*ig(5)*i0* nT/r;in v_a(i)=(deta(5)*m)/(Ft-Ff-Fw(i));delta(i)=0.01*i nv_a(i)/3.6;enda=delta(1:k);t(i)=sum(a);end plot(t,ua);axis([O 80 0100]);title('汽车2档原地起步换挡加速时间曲线');xlabel('时间t (s)');ylabel('速度ua( km/h)');>> gin putans=25.8223 70.073725.7467 70.0737所以汽车2档原地起步换挡加速行驶至70km/h的加速时间约为25.8s2.7已知货车装用汽油发动机的负荷特性与万有特性。