PMAC卡简介教程文件
PMAC卡简介
1.PMAC卡-简介和预备知识PMAC卡是功能非常强大的运动控制卡,但是网上PMAC的教程很少,仅有的几个教程还是官网培训教程,罗列概念和记流水账,最不喜欢这样的教程。
自己学习PMAC卡的时候走了许多弯路,刚好找完工作就写一下PMAC的相关教程,看完整个系列的教程,相信对于PMAC的使用是没有问题的,主要分为以下几个模块:1.简介和预备知识2.PMAC硬件3.PMAC下位机编程4.PMAC上位机编程PMAC简介PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价格不菲,但是使用及其方便,功能也极其强大,怎么强大自己去搜啦,这是官网链接。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、 Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样的,这里我使用的是Turbo PMAC1控制卡。
在国内PMAC有多家代理,笔者固定联系的是苏州均信,维修的话有北京泰道公司,北京泰道公司的官方QQ群号为190220668 ,在群里面可以提问,有各路大神和官方人员解答疑问,群共享里面也有许多资料供学习。
运动控制基础“工欲善其事,必先利其器”,在本文中还是先说一下运动控制相关理论,这里只是一些基本概念,深入了解还是要自行查看相关资料。
定义:在复杂条件下将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置控制、速度控制、加速度(转矩)的控制。
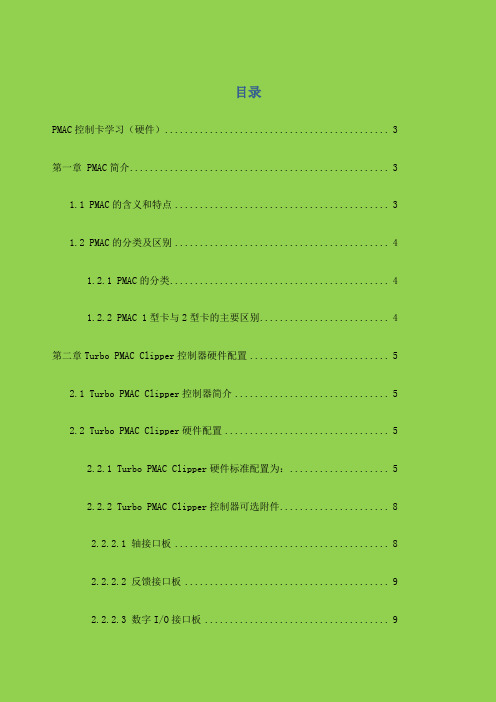
最简单的运动控制系统我们考虑一个最简单的控制卡-驱动器-电机反馈运动控制系统控制器:根据要求的参考输入信号(如位移、速度、力等),产生相应的控制信号,这里对应PMAC控制卡。
执行机构:根据运动控制器发出的控制信号,产生操作量,作用在被控对象上,带动被控对象产生相应的运动。
运动控制中执行机构通常由电机及其驱动器组成的,其中驱动器提供电机功率,使得电机做旋转或直线运动。
被控对象:将被操纵的机器设备称为被控对象。
PMAC培训教程中文版经典教程PPT
SELECTABLE-FREQUENCY CLOCK INPUTS
ENCODER SAMPLE
SERVO
PHASE DAC/ADC
160 PIN PLCC PACKAGE
A B C
A
B
4
C
ENCODER
INPUTS
A B C
A B C
ENCODER 1 ENCODER 2 ENCODER 3 ENCODER 4
10
POSITION INCREMENT REGISTER
ADDER
PHASE CLOCK
FIVE INPUTS "C" CHANNEL 4 FLAGS
A B ENCODER INPUT 30MHz MAX. (EDGE RATE)
SERVO CLOCK
ENCODER CLOCK 10 MHz DEFAULT
3 STATUS
16 CONTROLS
PMAC 1 CUSTOM GATE ARRAY (DSP GATE) ENCODER FUNCTIONS
(BRAD\ENCODER)
11
PMAC 可以做的工作
执行运动程序
PMAC 在某一时间执行一个运动, 并执行有关运动的 所有计算 PMAC 总是提前混合即将执行的运动
J1
J2
J3
J4
J5
J6
J7
J8
*JRS422 Option 9L Opto Isolated RS422 Daisy Chain PMAC’s
区别 外形 总线形势
4
Turbo PMAC 产品
TURBO PMAC1 PC TURBO PMAC1 VME TURBO PMAC2 PC TURBO PMAC2 VME TURBO PMAC2 PC Ultralite TURBO PMAC2 VME Ultralite UMAC PACK SYSTEM
pmac第一、二、三章 用户指导
第一章用户指导PMAC综述Deltu Tau Data System公司的可编程多轴运动控制卡Ⅱ型(PMAC2),是一个高性能伺服运动控制器,通过数字信号处理器(DSP),以及灵活的高级语言最多可控制八轴同时运动。
PMAC2给多轴控制器提供前所未有的性价比,Motorola的DSP56002是PMAC2的CPU,处理所有八轴的计算。
PMAC2有六种类型的板卡,PMAC2 – PC,PMAC2 – PC ultralit,PMAC2 – Lite,PMAC2 – VME,PMAC2 – VME ultralite和MINI PMAC2,这些卡在外型,总线接口形式和I / O端口的性能方面彼此各不相同。
所有这些形式的卡都有相同的在板固件,所以PMAC20的固件程序可以在其它任何形式的板卡运动。
任何形式的PMAC2型板既可以脱机运行,又可以通过串行或总线接口用一台主机来控制它运行。
适应能力作为一种具有广泛用途的控制器,PMAC2能用于各种各样的设备,从那些精密到小于百万分之一英寸的精密仪器到那些需要数百千瓦或马力的大型设备,它的多种用途包括机器人、机床、木工机械、装配线、食品加工、印刷、包装、物料装卸、摄像机控制、自动焊接、硅片加工,激光切割以及许多其他运动控制。
为一个任务的配置PMAC2可以通过硬件设置的选择(通过选件和备件),参数的设置和运动及PLC程序的编写,从而实现一种特殊用途。
每一个PMAC2固件能够控制八个轴。
这八个轴可以相互联致力以完成一个复杂的运动。
每一个轴也可以分别在各自坐标系中独立运动,从而得到八个完独立的运动。
或者在它们之间组合的形式。
PMAC2的CPU与轴的通信是通过特殊设计的门阵列ICs(作为DSPGATE而提到的)来实现,每一个ICs能够控制四个模拟输出通道,四个作为输入的编码器,和四个来自附件的模拟驱动输入,一个PMAC2可以运用一到四个门阵列ICs,从而规定硬件的配置总数,以便统计输入和输出的数量和类型,最多可以有16块PMAC2卡完全同步级链在一起使用,控制总128根轴。
PMAC速成参考手册

第一章 PMAC简介 (4)第一节关于本手册 (5)第二节 PMAC简单介绍 (6)第三节 PMAC型号 (7)1.3.1 PMAC-PCI (9)1.3.2 PMAC-PCI-Lite (10)1.3.3 Mini PMAC PCI (11)1.3.4 PMAC2-PCI (12)1.3.5 PMAC2-PCI-Lite (13)1.3.6 PMAC2A-PC104 (14)第四节 PMAC(1)连接端子描述 (16)第五节 PMAC(2)连接端子描述 (18)第六节 PMAC工作设定 (20)1.6.1 硬件设定 (20)1.6.2 软件设定 (20)1.6.3 PMAC设定 (21)第七节 PMAC工作应答 (22)1.7.1 单信号I/O (22)1.7.2 换相更新 (23)1.7.3 伺服环更新 (23)Mailbox处理 (24)1.7.4 -VME1.7.5 实时中断应答 (24)1.7.6 后台应答 (25)1.7.7 观察与检测 (25)第二章软件工具 (27)第一节配置PEWIN32 PRO组件 (28)2.1.1 保存与重置PMAC参数 (30)2.1.2 使用POSITION、TEMINAL等窗口 (31)2.1.3 察看电机、坐标系、全局状态 (33)2.1.4 上载、下载程序 (33)2.1.5 使用备份功能 (34)2.1.6 指导式I、M、P、Q变量用法 (35)第二节快速使用PMAC Plot PRO (36)第三节快速使用PMAC Tuning PRO 整定PID (38)第三章安装与配置PMAC (42)第一节跳线设定 (43)第二节串口连接 (44)第三节与上位机连接 (44)3.3.1 安装驱动与上位机识别 (45)3.3.2 复位PMAC (53)第四节连接端子8D、8P、8S、8E (54)第五节电源指定 (59)3.5.1 数字量支持 (59)3.5.2 模拟量支持 (59)3.5.3 标志开关支持 (59)第六节行程限位、回零开关 (60)3.6.1 关闭行程限位功能 (60)3.6.2 行程限位开关形式 (60)3.6.3 回零开关 (61)3.6.4 检查标志输入 (62)第七节电机控制信号连接 (63)3.7.1 编码器信号连接 (63)3.7.2 检查编码器输入 (63)3.7.3 检查DAC输出(1型卡) (63)3.7.4 检查PFM输出(2型卡) (64)3.7.5 电机使能信号(AENAx/DIRx) (64)3.7.6 电机报警(FaulTx) (65)3.7.7 通用I/O (65)3.7.8 常用设定 (70)第四章 PMAC指令与应用 (75)第一节在线指令 (76)第二节缓冲区(编程)指令 (77)第三节特色 (78)4.3.1 I变量 (78)4.3.2 P变量 (78)4.3.3 Q变量 (78)4.3.4 M变量 (79)4.3.5 队列处理 (79)4.3.6 运算方法 (80)4.3.7 功能简介 (80)4.3.8 比较功能 (80)4.3.9 用户自定义伺服算法 (80)第四节内存地址表 (81)第五节程序缓冲区 (81)第六节编码器转换表 (81)第七节 PMAC位置寄存器 (81)第八节回零运动 (81)第九节 Command、Send等增强指令 (82)第五章电机编程 (83)第一节 PMAC运动程序 (84)第二节笛卡儿坐标系 (85)5.2.1 轴的定义 (85)5.2.2 轴定义的扩展与描述 (85)第三节编写运动程序 (87)第四节执行运动程序 (89)第五节子程序或者辅助程序 (90)5.5.1 子程序/子例程变量交换 (90)5.5.2 G、M、T、D代码(标准机床代码) (90)第六节混合运动/加速度模式: (92)第七节圆弧查补 (94)运动 (95)第八节 Splined运动 (96)第九节 PVT-Mode第十节其他扩展特色运动 (97)5.10.1 旋转缓冲区 (97)5.10.2 内部时基控制 (97)5.10.3 外部时基控制(电子凸轮) (97)5.10.4 位置跟随(电子齿轮) (98)5.10.5 刀具半径补偿 (98)5.10.6 同步M变量调用 (99)5.10.7 多块PMAC同步 (100)5.10.8 轴转置矩阵 (100)5.10.9 位置捕捉或者位置比较 (100)5.10.10 会学习的运动程序 (100)第六章 PLC编程 (101)第一节关于PLC程序 (102)第二节 PLC程序结构 (102)第三节计算功能 (102)第四节有条件的计算 (103)第五节 While循环 (103)第六节 Command、Send等增强指令 (103)第七节计时器 (104)第八节编译PLC程序 (104)第七章注意的问题 (105)附页1: PMAC错误代码列表 (106)附页2: PMAC I变量功能列表 (107)附页3:在线指令列表 (108)附页4: PMAC编程指令列表 (109)附页5:电机常用M变量定义 (110)附页7:常见电机接线连接 (111)附页8: PMAC附件与选项 (112)第一章 PMAC简介第一节关于本手册本手册是为第一次使用PMAC 运动控制器的客户准备的,PMAC卡具有易学易用、编程简单、程序集成化程度高等特点,是许多开发人员的首选开发工具。
MC多轴运动控制卡学习硬件
目录PMAC控制卡学习(硬件) (3)第一章 PMAC简介 (3)1.1 PMAC的含义和特点 (3)1.2 PMAC的分类及区别 (4)1.2.1 PMAC的分类 (4)1.2.2 PMAC 1型卡与2型卡的主要区别 (4)第二章Turbo PMAC Clipper控制器硬件配置 (5)2.1 Turbo PMAC Clipper控制器简介 (5)2.2 Turbo PMAC Clipper硬件配置 (5)2.2.1 Turbo PMAC Clipper硬件标准配置为: (5)2.2.2 Turbo PMAC Clipper控制器可选附件 (8)2.2.2.1 轴接口板 (8)2.2.2.2 反馈接口板 (9)2.2.2.3 数字I/O接口板 (9)第三章 Turbo PMAC Clipper设备连接 (9)3.1 板卡安装 (9)3.2 控制卡供电 (10)3.2.1 数字电源供电 (10)3.2.2 DAC(数字/模拟转换)输出电路供电 (10)3.2.3 标志位供电 (10)3.3 限位及回零开关 (10)3.3.1 限位类型 (11)3.3.2 回零开关 (11)3.4电机信号连接 (11)3.4.1增量式编码器连接 (11)3.4.2 DAC 输出信号 (12)3.4.3 脉冲&方向(步进)驱动 (12)3.4.4 放大器使能信号(AENAn/DIRn) (13)3.4.5 放大器错误信号(FAULT-) (13)3.4.6 可选模拟量输入 (13)3.4.7 位置比较输出 (14)3.4.8 串行接口(JRS232) (14)3.5 设备连接示例 (14)3.6 接口及指示灯定义 (16)3.7 跳线定义 (19)3.8 Turbo PMAC Clipper端口布置及控制结构图 (23)附件 (26)1.接口各针脚定义 (26)2. 电路板尺寸及孔位置 (35)PMAC控制卡学习(硬件)第一章 PMAC简介1.1 PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
PMAC教材

PMAC教材1.PMAC控制卡及泰道公司简介1.1PMAC控制卡PMAC是可编程多轴控制器(Programmable Multi-Axis Controller)的简称,是美国泰道(Delta Tau Data Systems, Inc )公司⽣产的功能强⼤的运动控制器,PMAC是⽬前世界上功能最强的运动控制器,同时也是当前开放式数控系统控制器的突出代表1.2泰道公司介绍泰道公司拥有三⼗多年丰富的运动控制经验,是⾸屈⼀指的创新型、⾼性能机器控制专家,拥有全球数百万轴的惊⼈控制能⼒;⾃从上世纪90年代初推出第⼀款基于DSP的8轴的PMAC产品,每三年左右便会推出⼀款新的产品,如今最新的第七代产品Power PMAC(基于Power PC)已达到惊⼈的256轴的控制能⼒。
1.3应⽤范围由于其灵活的结构和开放性的编程接⼝,PMAC有着⾮常⼴泛的从最简单的到最复杂的应⽤,如半导体制造、航空、通⽤⾃动化、机器⼈控制、半导体⽣产线⾃动化、各类数控机床、医药设备、各种测量和定位机具、包装⽣产流⽔线⾃动化等等。
以下是在⼀些公司中1.4PMAC特性PMAC是⼀台具有独⽴内存、独⽴运算操作能⼒的计算机,采⽤泰道独有的实时内核(基于DSP的卡)或实时Linux操作系统(基于Power PC的卡)通过存储在⾃⼰内部的程序进⾏单独的操作;它还是⼀台实时的、多任务的计算机,能⾃动对任务进⾏优先等级判别,先执⾏优先级⾼的任务。
PMAC既可以独⽴⼯作亦可按主机的命令进⾏⼯作,它和主机的通讯可以通过串⾏⼝也可以通过总线进⾏,通过总线通讯时,还可以将中断信号引⼊主机,从⽽实现⾮常灵活有效的控制系统。
PMAC可以通过灵活的类似Basic的⾼级语⾔(Power PMAC还可以⽤C语⾔)控制多轴运动,提供了运动控制、可编程逻辑控制、同主机交互等基本功能;并具有各种现场总线和多种反馈装置接⼝。
PMAC的最⼤特点是开放性。
允许⽤户根据⾃⼰的⽤途使⽤内部寄存器。
PMAC软件的介绍
PMAC软件的介绍一、前言为了让公司员工以及客户能在近短的时间内掌握PMAC卡的基本应用,能简单操作PMAC卡,特编写次培训教材,希望大家提出宝贵的修改意见。
一、PMAC卡软件总的介绍I)、PMAC的软件分类●PMAC的编程、调试软件(PEWIN32 PRO);●PMAC的上位开发的动态库软件(PCOM32 PRO);●PMAC的人机开发软件(PMAC HMI);●简易设置PMAC2A-PC/1104卡的软件(EZ PMAC2A PC104 SETUP);●简易设置QMAC卡的软件(EZ QMAC);●PMAC的数控软件(PMAC NC);II)、PMAC的软件说明A、PEWIN32 PRO的组成;PEWIN32 PRO是一个编程、调试等组合软件,包括以下软件组件:1.PEWIN32 PRO-----主要是编程、调试的软件;2.PMAC Plot Pro-----是进行数据采集功能的软件,它可以监测电机运动参数,如指令/实际速度、指令/实际位置和M变量等;3.PMAC Tuning Pro----是调试电机特性的软件即调电机的PID;4.P1 Setup32 Pro--------是逐步配置PMAC1型卡的设置软件;5.P2 Setup32 Pro--------是逐步配置PMAC2型卡的设置软件;6.Tubro Setup32 Pro--------是逐步配置Tubro PMAC1/2型卡的设置软件;7.UMAC Config Pro-------是用来检测UMAC硬件配置的软件;B、主要软件的安装和使用说明安装PEWIN32 PRO的主要步骤●安装PEWIN32 PRO和组合软件包●安装Service Pack4.0(补丁4.0)●安装ISA/COM(串口)/ Ethernet(以太网)的通讯驱动PEWIN32 PRO 安装的操作系统可以是:●Windows 98●Windows ME●Windows 2000●Windows XP电脑硬件配置要求:●CPU是400MH奔II以上●硬盘至少40MB的空间●通讯接口要有USB、COM(串口)、ISA/PCI●显示器至少是256色800 X 600的分辨率的VGA安装PEWIN32 PRO和组合软件包的步骤:(例:在Windows XP安装)1、打开PEWIN32 PR的文件夹双击安装图标Install 1弹出安装画面如下:2、单击PEWIN32 Pro ,弹出安装画面;3、输入软件的系列号,单击OK,弹出安装画面;4、单击Next,弹出安装画面;5、单击Yes,弹出安装画面;6、单击Browse选择安装目录,在单击Next弹出安装画面;7、单击Next弹出安装画面;8、单击Next弹出安装画面;9、单击Finish,即安装完PEWIN32 PRO软件;10、如果要继续安装PEWIN32 PRO软件下其他的软件包(有:PMAC Plot Pro,PMAC Tuning Pro,P1 Setup32 Pro,P2 Setup32 Pro,Tubro Setup32 Pro,UMAC Config Pro),可以在第一步中重新选择相应的软件,再逐步向下安装软件即可(注:所有软件的序列号相同);11、重新启动计算机;安装Service Pack4.0(补丁4.0)1、打开Service Pack4.0的文件夹;2、双击Prosp40, 弹出P rosp40.exe窗口在单击Unzip将文件解压到c:\deltatau下;3、弹出成功解压窗口,单击确定;4、打开c:\deltatau\Disk1,双击Setup5、弹出安装向导窗口,单击Next;6、弹出安装向导窗口,单击Next;7、弹出安装向导窗口,单击Next;8、弹出安装向导窗口,单击Finish完成并重新启动计算机;如何安装ISA/COM(串口)/ Ethernet(以太网)的通讯驱动;PMAC 卡有几种通讯方式●COM n(串口)通讯●ISA 总线通讯●PCI 总线通讯●USB 通讯●Ethernet(以太网)通讯注:对于USB 通讯和PCI 总线通讯方式,因为它是即插即用的上电后计算机自动找到相应的驱动,不需要安装(USB只需要在第一次使用时按照提示安装一遍即可);而对于COM n(串口)通讯、ISA 总线通讯和Ethernet(以太网)通讯方式它们都不是即插即用,在通讯之前要安装相应的驱动才可以通讯;A、安装ISA/COM(串口)通讯驱动(例:在Windows XP安装);1、单击开始/设置/控制面板;2、弹出控制面板画面,双击添加硬件;3、弹出添加硬件向导画面,单击下一步;4、弹出添加硬件向导画面,单击下一步;5、弹出添加硬件向导画面,单击添加新的硬件设备然后单击下一步;6、弹出添加硬件向导画面,单击从手动列表选择然后单击下一步;7、弹出添加硬件向导画面,单击显示所有设备然后单击下一步;8、弹出添加硬件向导画面,从厂商中选择Delta Tau Data System然后从型号中选择PMAC ISA Motion Controller或PMAC Serial Port Motion Controller 最后单击下一步;9、弹出添加硬件向导画面,单击下一步;10、弹出添加硬件向导画面,单击完成;注:第一次安装时,会弹出一个窗口要用户找驱动的安装目录;Windows 98/ME/XP: c:\windows\system32\driversWindows 2000: c:\winnt\system32\drivers11、弹出系统设置改变画面,单击是重新启动计算机完成COM(串口)通讯驱动的安装;对于ISA通讯驱动安装还要设置资源地址;12、单击我的电脑右键/属性;13、弹出系统属性画面,选择硬件再单击设备管理器;14、弹出设备管理器属性画面,选择Motion Controllers/PMAC ISA Motion Controller再双击,;15、弹出PMAC ISA Motion Controller属性窗口选择资源标签,将使用自动设置的复选框去掉,最后双击输入/输出范围;16、弹出输入/输出范围窗口,用上下箭头调整值为0210-021F在单击确定;17、退回到PMAC ISA Motion Controller属性窗口,单击确定;18、弹出正在创建强制性配置窗口,单击是(Y);19、退回到设备管理器窗口,将设备管理器窗口关闭;20、退回到属性窗口,单击确定完成ISA资源地址设置;21、重新启动计算机;B、安装Ethernet(以太网)的通讯驱动(例:在Windows XP安装);。
PMAC 技术培训(高级)

EEPROM or Flash不被激 活的寄存器
RAM, DSP, ASIC’s上的激 复位、初始化 活的寄存器
工作寄存器
PMAC 主机 读 写
PMAC复位方式 1. 重新上电 2. INIT/信号低/高 3. $$$ 指令 NEW IDEAS IN MOTION
6
PMAC 程序和缓冲区存储
带后备电池 主存储器 [PMAC1]
0.7
1.5 2
PMAC2-VME***
PMAC2-PC Ultralite*** PMAC2-VME Ultralite
VME
ISA VME
0
0
1
1
* 所有型号均有2路附加通道 ** RS422 with Option 9L *** Available with Turbo CPU
NEW IDEAS IN MOTION
TAXI Optical TAXI
MACRO
RAM ROM
FLASH
ENC PWM
ENCODER A/B QUAD
PWM +/- 10 V.
CPU
JEXP
MACRO
Optical
CPU
NO RAM OR FLASH
DAC I/O
TAXI
RJ45
TAXI
96 I/O
基板 + 2 背板
PMAC2 Ultralite 板卡 ! 1) 板卡接口只有 MACRO & I/O 接口 2) 保留了 PMAC2 的基板功能,用MACRO STATION控制8轴。 3) PC & VME 格式 4) TURBO 版本的 PMAC ULTRALITE 能控制 32 轴
串行 通讯 接口
PMAC多轴运动控制卡
BUS COMMUNICATIONS
INTERFACE
INPUT/ OUTPUT BUFFERS
Option 2
BUS PORT
Option 1
DSP GATE1 INPUT/ OUTPUT
BUFFERS
PMAC 系统应用
A
B
4
C
ENCODER
INPUTS
A B C
A B C
ENCODER 1 ENCODER 2 ENCODER 3 ENCODER 4
ENCODER CONTROL
(GATE-ARY)
24-BIT DATA BUS
FLAG CONTROL
DAC SHIFT REGISTERS (4)
DSP-GATE
ADC SHIFT REGISTERS (4)
DSP GATE1 4-Channel SERVO ASIC
EXPANSION MACHINE PORT 4 MACHINE PORT 3 MACHINE PORT 2 MACHINE PORT 1
FLASH 512Kx8 FIRMWARE & USER BACKUP
DPRAM 8Kx16 INTERFACE
常规管理 跟随误差限制 硬件超程限制 软件超程限制 放大器报警
在每个PLC扫描之间, PMAC 执行上述任务保证自身的正常更新,如果这 些功能不能在最小的频率内检测,卡上的看门狗将报警.
同上位机通讯 PMAC 可以与上位机实时通讯 如果指令是违法的, 他将报告给上位机
任务优先级 任务优先级保证卡的工作效率和安全 优先级是固定的,但是他们的频率时可以由用户控制的
INPUT FLAGS
OUTPUT FLAGS
PMAC培训教程中文版(经典教程)
区别 外观 总线接口 使用的I/O端口
3
PMAC2 产品
PMAC2 PC Mini PMAC2 PMAC2 PC Ultralite PMAC2-Lite PMAC2 VME PMAC2 VME Ultralite
所有产品
作为独立的控制器运行
PMAC1 LAYOUT
15
JTHMB ACC34x 32in/32 out multiplexed IO ACC16 Thumbwheel ACC27 8in/8out dedicated IO ACC8Dopt7 Resolver Input ACC8Dopt9 Yaskawa Input ACC35 Driver for ACC 34x PMAC NC Control Panels
3
E23
E22
3 E27
E26 3
E90
E88
E85 E87
J8
E75 E74
E73 E72
E71
E66 E92 E91 E65
E53 E51 E48 E44 E40
JEQU Outputs from position compare
JEXP ACC-24 PMAC Extension Card ACC-29 MLDT ACC-14 Parallel I/O Option 2 DP RAM ACC-49 Sanyo Absolute Encoder
JMACRO ACC42 MACRO Interface for PMAC2
JANA Option12 8-16 Channel 12-bit ADC
JOPTO ACC21A, 40-pin IDC to 50-pin OPTO22 32-bit Input/Output 40-pin IDC
PMAC入门教程-让电机动起来介绍
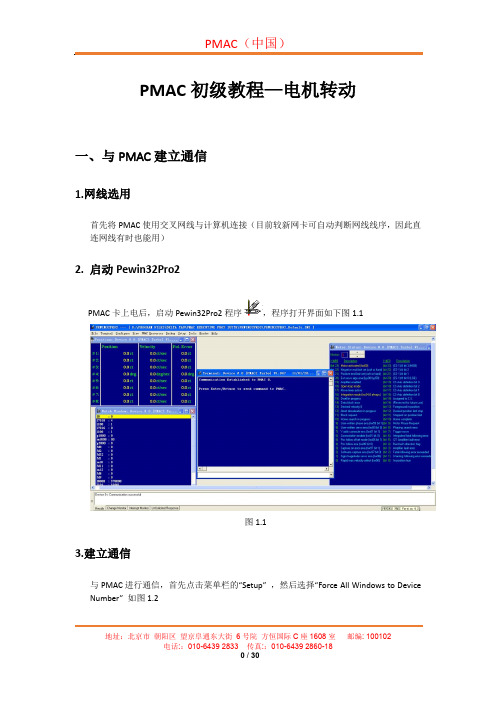
图 2.4
3.激活电机
接下来我们看一下,Ixx00,当 Ixx00=1 激活 xx 号电机,这里我使用的#1 号电机,所以 我们在“Terminal”窗口键入“I100=1”回车。我们赋值 0 或者 1 观察一下“Motor Status” 中 4 所指的电机状态的变化AC(中国)
图 1.2 之后弹出如下窗口,单击“Insert”,如图 1.3
图 1.3
图 1.4 然后在弹出窗口,如图 1.4 中,点击“New”,然后在弹出的窗口中选择“Ethernet(ETH)” (以太网连接),然后点击 OK。
图 1.5 之后弹出窗口如图 1.5,在 “IP Address”中填入 192.6.94.5 (PMAC 出厂配置为此 IP), 然后点击 “Network Test”,如果测试通过,点击 “OK”,之后弹出下图 1.6,选择 1 所指的 IP 地址,点击 “OK”。
接下来我们看一下 Ixx02。Ixx02 电机 XX 指令输出地址(XX 表示第几号电机,如#1 电 机为 1)。每个电机有三个输出寄存器 A、B、C,决定 PMAC 输出的指令类型。使用 A、B、C 中的哪一个寄存器,是由 Ixx02 决定的。例如:Turbo PMAC2 卡的#1 号电机$078002 是输出 A 寄存器地址;$078003 是输出 B 寄存器地址;$078004 是输出 C 寄存器地址(其他电机或者卡 的地址请查阅软件手册)。
PMAC多轴运动控制卡学习硬件.doc
实用标准文案目录PMAC控制卡学习(硬件) (2)第一章 PMAC简介 (2)1.1 PMAC 的含义和特点 (2)1.2 PMAC 的分类及区别 (2)1.2.1 PMAC 的分类 (2)1.2.2 PMAC 1 型卡与 2 型卡的主要区别 (2)第二章 Turbo PMAC Clipper 控制器硬件配置 . (3)2.1 Turbo PMAC Clipper 控制器简介 (3)2.2 Turbo PMAC Clipper 硬件配置 (3)2.2.1 Turbo PMAC Clipper 硬件标准配置为: (3)2.2.2 Turbo PMAC Clipper 控制器可选附件 (6)2.2.2.1 轴接口板. (6)2.2.2.2 反馈接口板 . (7)2.2.2.3 数字 I/O 接口板 . (7)第三章 Turbo PMAC Clipper 设备连接 (7)3.1 板卡安装 . (7)3.2 控制卡供电. (7)3.2.1 数字电源供电. (7)3.2.2 DAC (数字 / 模拟转换)输出电路供电 (8)3.2.3 标志位供电 . (8)3.3 限位及回零开关 . (8)3.3.1 限位类型 . (8)3.3.2 回零开关 . (8)3.4 电机信号连接 (9)3.4.1 增量式编码器连接 (9)3.4.2 DAC 输出信号 . (9)3.4.3 脉冲 &方向(步进)驱动 . (10)3.4.4 放大器使能信号 (AENAn/DIRn) . (10)3.4.5 放大器错误信号 (FAULT-) . (10)3.4.6 可选模拟量输入 . (11)3.4.7 位置比较输出. (11)3.4.8 串行接口 (JRS232) . (11)3.5 设备连接示例 . (12)3.6 接口及指示灯定义 . (13)3.7 跳线定义 . (15)3.8 Turbo PMAC Clipper 端口布置及控制结构图 (19)21 附件 .......................................................................1. 接口各针脚定义 (21)2. 电路板尺寸及孔位置. (30)PMAC控制卡学习(硬件)第一章 PMAC简介1.1 PMAC 的含义和特点1.PMAC的含义:PMAC是 program multiple axis controller可编程的多轴运动控制卡。
PMAC多轴运动控制卡学习硬件

P M A C多轴运动控制卡学习硬件公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]目录PMAC控制卡学习(硬件)第一章 PMAC简介PMAC的含义和特点1.PMAC的含义:PMAC是program multiple axis controller 可编程的多轴运动控制卡。
的特点:PMAC卡是美国Delta Tau公司九十年代推出的多功能运动控制器,能够提供运动轴控制,PLC控制和数据采集等多种功能。
PMAC的分类及区别PMAC的分类1. PMAC卡按控制电机的来分:有1型卡和2型卡。
1型卡控制信号为±10V模拟量,主要用速度方式控制伺服电。
2型卡输出PWM数字量信号,可直接变为PULSE+DIR信号,来控制步进电机和位置控制方式的伺服电机。
2. PMAC卡按控制轴数来分:有2轴卡(MINI PMAC PCI),4轴卡(PMAC PCI Lite,PMAC2 PCI Lite, PMAC2A-PC/104及Clipper),8轴卡:(PMAC-PCI,PMAC2-PCI,PMAC2A-PC/104及Clipper),32轴卡:(TURBO PMAC和TURBO PMAC2)。
3. PMAC卡按通讯总线形式分:有ISA总线,PCI总线,PCI04总线,网口和VME总线。
PMAC各种轴数的1型和2型卡,都有上述的计算机总线方式供选择。
PMAC除上述形式外,还可以提供集成的系统级产品.有:UMAC,IMAC400,IMAC800 ,IMAC flexADVANTAGE400 ,ADVANTAGE900等。
PMAC 1型卡与2型卡的主要区别PMAC 1PMAC2 CPU时钟(缺省)20MHZ40MHZ控制信号形式DAC模拟量PWM数字量双端口RAM选项只有8轴卡不在板在板在板I/O点数16IN 16OUT32IN/OUT +8IN 8 OUT常用接线板ACC8D ACCP ACC8F ACC8S ACC8E 第二章Turbo PMAC Clipper控制器硬件配置Turbo PMAC Clipper控制器简介Turbo PMAC Clipper控制器(Turbo PMAC2 Eth-Lite) 是一款具备全部Turbo PMAC 特征的,用于对成本极端敏感的应用的多轴运动控制器。
PMAC入门教程-让电机动起来

下面举一些 PID 调整的例子
图 6.1
地址:北京市 朝阳区 望京阜通东大街 6 号院 方恒国际 C 座 1608 室 电话::010-6439 2833 传真::010-6439 2860-18 7 / 30
邮编: 100102
PMAC(中国)
图 6.2 如图 6.2,第一种超调,应当减小 Kp,增加 Kd;第二种相应延迟,可能是阻尼太大,或 者比例增益太小,增加 Kp 或者减小 Kd;第三种,位置偏移,增加 Ki 和 Kp;第四种,机 械或者驱动器的限制,可以尝试增加 Kp。
2、打开 PMAC Tuning Pro2
3、一般第一步是看系统的开环特性
地址:北京市 朝阳区 望京阜通东大街 6 号院 方恒国际 C 座 1608 室 电话::010-6439 2833 传真::010-6439 2860-18 10 / 30
邮编: 100102
PMAC(中国)
看开环特性是否正确:指令和反馈是否方向一致,
邮编: 100102
2.设置电机输出指令
PMAC(中国)
对于普通带有驱动的电机,电机控制指令一般分为两种,模拟指令与脉冲加方向指令。 例如安川∑-Ⅴ系列伺服驱动,当驱动设定在“速度控制(模拟量电压指令时)”电机的 转速与转向,取决于模拟量的电压及电压方向,如图 2.2,同时请注意接线,分为差分 信号与单极性型号两种,接线有区别。∑-Ⅴ系列驱动器接线式单极性信号。
图 5.3 如果出现以下,如图 5.4 所示,说明电机编码器反馈设置不对,电机运动与指令方向完 全相反。此设置可以在 I7mn0 中调整,对于#1 号轴是 i7010。I7mn6 的设置如图 5.5,具体 可以参见软件手册。
地址:北京市 朝阳区 望京阜通东大街 6 号院 方恒国际 C 座 1608 室 电话::010-6439 2833 传真::010-6439 2860-18 6 / 30
简介pmac运动控制卡
简介pmac运动控制卡
PMAC运动控制卡内部使用了一片Motorola DSP 56003数字信号处理芯片,它的速度、分辨率、带宽等指标远优于一般的运动控制卡。
伺服控制包
括PID加Notch和速度、加速度前馈控制,其伺服周期单轴可达60μs,二轴
联动为110μs。
产品的种类可从二轴联动到三十二轴联动。
甚至连接
MACRO现场总线的高速环网,直接进行生产线的联动控制。
与同类产品相比,PMAC运动控制卡的特性给系统集成者和最终用户提供了更大的柔性。
它允许同一控制软件在三种不同总线(PC-XT和AT,VME,STD)上运行,由此提供了多平台的支持特性。
并且每轴可以分别配置成不同的伺服类型和
多种反馈类型。
PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价
格不菲,但是使用及其方便,功能也极其强大。
PMAC于东控制卡它能够对
存储在内部的程序进行单独运算,执行运动程序、PLC程序进行伺服环更新,并以100Mb/s以太网口与主计算机进行通讯。
其速度、分辨率、带宽、伺服
控制精度等指标远远优于一般的控制器,具有位置比较脉冲输出和D/A输出,并且能够接收编码器的反馈信号,可以控制步进、交直流伺服、直线电机、
液压伺服等各类电机,可以接收多种检测元件的反馈功能,并且允许用户使
用VC++、C、C++、VB、Delphi等多种语言开发程序,极大地方便了用户。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样。
PMAC_技术培训(初级)

机器接口 1
SRAM 128 k x 24 Active Memory
CPU 24-Bit 20/40/60/ 80 MHz DSP 56002
Watchdog 定时器
串行 通讯 接口
“DSPGATE” 4-Channel 伺服电路
“DSPGATE” 4-Channel 伺服电路
光隔 16-bit DACs
24-B IT DATA BUS 16-B IT ADD RESS BUS
C LO C K M U X C O N TR O L
A C C E S S O R YB O A R D
6 Lines
6P W MO utputs per channel for Digital A m ps and PulsE & D irection O utputs for Stepper M otor
E-MOTION
PMAC多轴运动控制卡
PMAC 反馈性能
z z
ACC- 8D option 9
– 接收安川绝对编码器反馈
ACC-28A, ACC-28B , ACC-36, or PMAC2 Option12
– 接收线性电压信号, 电位机反馈信号 – 接收其他类型的电压传感器信号
z
ACC- 29 (PMAC2内置):
NEW IDEAS IN MOTION
E-MOTION
PMAC多轴运动控制卡
Machine I/O
Amplifier
A BC A B C interface
PMAC
Motor
Enc. Halls
Software Interface
E-MOTION
z z z z
最新PMAC运动控制卡培训资料

执行 PLC 程序
在处理器允许的时间内尽可能快的扫描后台PLC PLC用在任何与运动程序异步的任务场合
DELTA TAU
Data Systems, Inc.
PMAC 任务优先级
单字符输入/输出
高
每个字符占用200纳秒,最高优先级保证PMAC在字符操作时不会失
去主机的控制
换相更新
缺省时无刷电机换相周期110微秒(换相操作占用3微秒 ),占用PMAC 运算能力的3%
伺服环更新
计算新的指令位置,读入新的实际位置,差值计算输出,缺省的伺服更 新时间442微秒(更新操作占用30~60微秒),占用PMAC运算能力7%
PWM
PWMABOT
Va
n
PWMBTOPn PWM PWMBBOT
n
PWMCTOPn PWM
PWMCBOT n DC BUS -
Vb
Motor
Vc
Encoder
换相算法 Encoder
DAC1 DAC2
AGnd
换相算法
ia measured
ib mEenacsoudreerd Feedback
DELTA TAU
PMAC 看门狗计时器 DELTA TAU
Data Systems, Inc.
(中级)
实时中断,置位W.D
后台任务经常没有事件, 因此停止更新计时器.
NOES Y
读 W.D 寄存器
W.D寄存器 > 0
E YES WS.DY.
寄存器递减计数
PMAC 算法确保 看门狗 检测25HZ 时钟信号.使得前后台任务稳定进行.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
P M A C卡简介1.PMAC卡-简介和预备知识PMAC卡是功能非常强大的运动控制卡,但是网上PMAC的教程很少,仅有的几个教程还是官网培训教程,罗列概念和记流水账,最不喜欢这样的教程。
自己学习PMAC卡的时候走了许多弯路,刚好找完工作就写一下PMAC的相关教程,看完整个系列的教程,相信对于PMAC的使用是没有问题的,主要分为以下几个模块:1.简介和预备知识2.PMAC硬件3.PMAC下位机编程4.PMAC上位机编程PMAC简介PMAC基本上算是自动控制行业中功能最强大的运动控制卡了,虽然价格不菲,但是使用及其方便,功能也极其强大,怎么强大自己去搜啦,这是官网链接。
PMAC是一系列控制卡的简称,常用的有PMAC1、PMAC2、Turbo PMAC1、 Turbo PMAC2、UMAC、Clipper等,基本功能和使用方法是一样的,这里我使用的是Turbo PMAC1控制卡。
在国内PMAC有多家代理,笔者固定联系的是苏州均信,维修的话有北京泰道公司,北京泰道公司的官方QQ群号为190220668 ,在群里面可以提问,有各路大神和官方人员解答疑问,群共享里面也有许多资料供学习。
运动控制基础“工欲善其事,必先利其器”,在本文中还是先说一下运动控制相关理论,这里只是一些基本概念,深入了解还是要自行查看相关资料。
定义:在复杂条件下将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置控制、速度控制、加速度(转矩)的控制。
最简单的运动控制系统我们考虑一个最简单的控制卡-驱动器-电机反馈运动控制系统控制器:根据要求的参考输入信号(如位移、速度、力等),产生相应的控制信号,这里对应PMAC控制卡。
执行机构:根据运动控制器发出的控制信号,产生操作量,作用在被控对象上,带动被控对象产生相应的运动。
运动控制中执行机构通常由电机及其驱动器组成的,其中驱动器提供电机功率,使得电机做旋转或直线运动。
被控对象:将被操纵的机器设备称为被控对象。
这里对应常用旋转电机运动模组或直线电机模组。
传感器(反馈检测装置):对被控对象的过程实际信号(如实际位移、实际速度、实际力等)进行检测、转换为电信号,经整形、放大提供给控制器,从而对被控对象构成闭环负反馈控制。
常用的传感器有光电编码器、光栅尺、测速发电机和张力/压力控制器等。
如上图,可以看到运动控制系统有反馈检测装置,就拿这里的运动控制系统来说,不使用反馈控制的运动控制系统就叫开环系统,反馈控制的是通过编码器采集的信号来反馈的运动控制系统就叫半闭环控制系统(因为此时的被控对象的信号是间接的方式得到的),反馈控制的是通过光栅尺采集的信号来反馈的运动控制系统就叫全闭环控制系统。
三环控制关于三环控制,有一篇比较通俗的文章(原文链接),这里截取一段,稍作修改如下:运动伺服一般都是三环控制系统,从内到外依次是电流环、速度环、位置环,这三环一起构成一个完整的运动控制系统。
1、电流环:电流环的输入是速度环PID 调节后的输出,我们称为“电流环给定”,然后电流环的这个给定和“电流环的反馈”值进行比较后的差值在电流环内做PID 调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的。
2、速度环:速度环的输入就是位置环PID 调节后的输出以及位置设定的前馈值,我们称为“速度设定”,这个“速度设定”和“速度环反馈”值进行比较后的差值在速度环做PID 调节后输出就是上面讲到的“电流环的给定”。
速度环的反馈来自于编码器(光栅尺)的反馈后的值经过“速度运算器”得到的。
3、位置环:位置环的输入就是外部的脉冲(如在控制卡中输入的待运动位置指令),外部的脉冲经过平滑滤波处理和电子齿轮计算后作为“位置环的设定”,设定和来自编码器反馈的脉冲信号经过偏差计数器的计算后的数值在经过位置环的PID 调节后输出和位置给定的前馈信号的合值就构成了上面讲的速度环的给定。
位置环的反馈也来自于编码器(光栅尺)。
在上图中,我标出了三环控制和运动控制系统基本组成的对应关系,可以看到三环控制是把控制器、执行结构、被控对象和反馈检测细化了,上图中是一种常用的伺服电机驱动模式——速度控制模式(即电机驱动器包括速度环和电流环),其他的伺服电机驱动模式包括位置控制模式、力矩控制模式等等。
还需要注意的是在每一环的控制中,我们引入了PID控制的概念。
PID控制PID是在工业控制中经典的控制算法,现在仍然被普遍的采用。
当我们知道被控对象目标控制值,和当前被控对象实际测量值,那么就可以计算出实际控制差值,这就是反馈,那么拿到这个反馈要如何处理得到输出信号给被控对象使得被控对象的实际测量值越来越接近目标控制值呢?这时候就要有一种计算输出信号的算法,这里就该PID工作了。
PID详细名称为:比例-积分-微分控制方式,是一种误差控制算法,综合作用可以使系统更加准确稳定的达到控制的期望。
关于PID算法的原理和调节策略通俗讲解参见这篇文章。
如果想深入研究,参见这篇文章,英文好的好的话也可以参见wiki。
在使用PMAC完成运动控制的时候,调整PID是必不可少的一个环节,一定要对PID原理有基本了解和知道PID的调节步骤。
2.PMAC硬件-一个运动控制系统的实例运动控制系统的构成有很多方式,你可以使用嵌入式系统、专用运动控制PLC、工控机+运动控制卡、专用数控装置等等。
PMAC控制一般采用的都是工控机+运动控制卡(IPC)的方式,这样有搭建系统比较灵活,可扩展性强等优点。
下面是一个完整的PMAC运动控制系统硬件组成和接线及信号传输示意图。
整个运动控制系统按信号流通顺序,由PC->PMAC卡->PMAC卡转接板->电机驱动器->电机(编码器)->运动模组(限位传感器)构成。
图中红色线为信号传输示意图。
对于一个控制系统来说,都有驱动电路和控制电路两路电。
图中,驱动电路主要用于给驱动器供电,处理后输出电机驱动电以供电机正常工作,这里不同的驱动器要求不一样(220V或380V),这里为了简单使用220V。
图中,控制电路主要控制整个系统:1.交流接触器控制主驱动回路的通断(可采用直流接触器24V或交流接触器220V,这里用220V)2.电机驱动器控制电路供电(不同的驱动器要求不一样,直流24V或交流220V,这里为了简单使用220V)3.转接板供电(转接板是将PMAC的信号分流,可使用官方转接板或自行设计的转接板,220V变压后输出15V给转接板供电)4.图中的限位传感器供电,220V变压后输出24V给转接板供电。
(这里只是示意,实际中信号线和供电线都是从转接板走线)下图是更加形象的说明整个系统的构成:图中的正负限位起保护作用,零限位用于编码器+滚阻丝杠模组回零时找到原点(因为编码器一般是增量编码器、不知道自己的当前位置),如果是光栅尺反馈也可以使用标记原点来回零。
注意图中的运动模组,这里使用的是伺服电机+编码器+滚珠丝杠模组,构成半闭环系统,也可以使用直线电机+光栅尺(或伺服电机+编码器+滚珠丝杠模组+光栅尺)构成全闭环系统。
如果是滚珠丝杠模组,需要了解导程这个概念,即丝杠转动一周模组前进的距离,常见导程为10mm,20mm。
如果是使用光栅尺作反馈,需要了解光栅尺分辨率这个概念。
光栅尺的分辨率,是指光栅尺可读取并输出的最小长度变化,对应的参数有:每毫米光栅刻线数、脉冲数、细分等。
目前国内光栅尺分辨率一般有5μm、1μm、0.5μm、0.2μm、0.1μm。
以每毫米50线光栅为例,经过4细分,就能得到很简单的5μm的分辨率,至于高分辨率的光栅尺,就必须采用电子细分技术。
再说整个模组的定位精度和重复定位精度,简单来说定位精度就是在一次定位测量中运动测量结果和实际目标指令距离的偏差范围,重复定位精度就是在多次定位测量中运动测量结果相互之间的偏差范围。
整个模组的定位精度和重复定位精度是我们在设计一个运动控制系统时必须考虑的因素,这个受诸多因素的影响,必须认真考虑。
如光学部分、机械部分、电气部分等等。
这里有个常见的问题需要强调,整个模组的定位精度和重复定位精度是由实际测量元件和运动元件决定的,如果只是提高编码器、光栅尺等测量元件的精度,对于运动部分(电机、模组)的精度不够,那么整个模组的定位精度和重复定位精度依旧提不上去,举个最简单的例子,现在在100mm处,想运动到100.1mm处,光栅尺、编码器的精度可精确到0.1um,但是电机+模组精度有限,一个脉冲就跑了1mm,那么无论如何也是不能够跑到100.1mm处的啦。
经常有人说我的测量精度是够的,为什么不能够到精确运动啊,这个很可能和你的运动部分有关系。
3.PMAC硬件-组成和接口及安装拿到一块PMAC卡,首先我们要看一下他的硬件组成(DSP)和提供的各种接口(I/O、串口等),然后就开始做准备工作(设置跳线),最后是安装(插槽PCI和转接板)。
硬件组成和接口PMAC是基于Motorola DSP的伺服控制卡,不同型号的PMAC可控制的最大轴通道个数不一样,DSP型号也不一样。
有专门的伺服芯片来完成编码器反馈计算等工作,PMAC中最容易坏的地方就是这组芯片,实际部署时要做好接地保护和高压保护,一定不要热插拔。
我所在实验室用的是Turbo PMAC PCI1,我也是用这个做示例,其他的诸如UMAC、Clipper等系列应该差不多,请自行研究。
如下图标出了常用接口:JEXP是安装扩展板卡的扩展口,如常见的增加通道个数(默认为8个通道)的卡等等,这是官网的扩展卡选配链接。
JMACH1和JMACH2分别是对应1-4轴及5-8轴的控制信号输出通道,一般和转接板相连。
JOPTO是8路输出和8路输入通道口,一般的IO信号输出输出使用它。
PMAC有各种和上位机(PC)相连的方式,这里采用PCI接口,不同的型号还有VME、USB等方式。
其他接口概不详述,请查阅手册。
准备工作在上图中,我标出了跳线的位置,图中包括两种:使用跳线帽(红色)跳线和未跳线。
跳线就相当于我们使用的软件设置选项一样,通过设置不同的跳线来配置不同的硬件功能,这是根据使用需求决定的,一般默认跳线是满足通用需求的。
常用跳线如下:1.供电跳线一般采用默认如下:E85、E87、E88选择OFF,E89 跳线选择ONE90跳线选择1-2E100跳线选择1-22.电机控制跳线E17A、E17B、E17C、E17D跳线选择OFF(控制伺服电机选择OFF,控制音圈电机/直线电机选择ON)3.中断跳线中断是下位机(PMAC)向上位机通信的机制,这里我们需要通过跳线配置中断触发的通道和变量。
查阅硬件手册E54-E65用于设置中断,这里手册有点不清楚,我来解释一下,比如对于E54:可知默认没有跳线,一旦找到跳线,使用跳线帽连接,允许通过EQU8通道来向上位机发送中断请求以完成向上通信,这个中断级别为IR7,级别越高,越先被响应,PMAC用户可使用的有IR5、IR6、IR7三个中断级别,IR1-IR4应该是被PMAC自身保留采用。