嵌入式作业题答案
嵌入式习题答案(DOC)

6.用汇编语言编写程序,求1到50的累加和。
答:
1
32
R50x40003005
R00
R11
LOOP
BLOOP
R001
R111
R150
R0,[R5]
B.
7.请说明汇编语句R2,[R04]和R2,[R04]!的区别。
答:状态:处理器执行32位的字对齐的指令;状态:处理器执行16位的半字对齐的指令。
指令集和指令集均有切换处理器状态的指令。
从状态转换到状态:
R0, 1
R0
8.处理器有哪些工作模式?哪些是特权模式?哪些是异常模式?
答:体系结构支持7种工作模式(),分别为用户模式()、快中断模式()、中断模式()、管理模式()、数据访问终止模式()、系统模式()、及未定义指令中止模式()。除去用户模式外的其他6种处理器工作模式称为特权模式()。除去用户模式和系统模式以外的5种处理器工作模式称为异常模式()
答:第2个操作数的三种形式如下。立即数,例如:R00x0000F200;寄存器方式,例如:R1,R1,R2;寄存器移位方式,例如:R112 R3。
3.请分别写出调用子程序、子程序返回所使用的指令,并简述所用指令的工作过程。
答:用指令调用子程序。指令先将下一条指令的地址拷贝到R14(即)连接寄存器中,然后跳转到指定地址运行指令。子程序返回的指令是:,。
答:8[R0+4]2;R0不变
32[R0+4]=R2;R00+4
32[]表示存储器的存储单元中存放的32位字数据,16[]表示存储器的存储单元中存放的16位半字数据,8[]表示存储器的存储单元中存放的8位字节数据
嵌入式试题及答案
嵌入式试题及答案一、单项选择题(每题2分,共20分)1. 嵌入式系统是指:A. 具有特定功能的计算机系统B. 只运行单一任务的计算机系统C. 可以运行多个操作系统的计算机系统D. 以上都不是2. 下列哪项不是嵌入式系统的典型特征?A. 实时性B. 可扩展性C. 资源受限D. 专用性3. 嵌入式系统中,通常使用哪种类型的处理器?A. 通用处理器B. 精简指令集处理器(RISC)C. 复杂指令集处理器(CISC)D. 以上都是4. 在嵌入式系统中,操作系统的作用是什么?A. 管理计算机硬件资源B. 提供用户界面C. 执行所有程序D. 以上都不是5. 以下哪个不是嵌入式操作系统?A. LinuxB. WindowsC. VxWorksD. QNX6. 嵌入式系统的硬件设计通常需要考虑哪些因素?A. 成本B. 功耗C. 尺寸D. 所有以上7. 以下哪个是嵌入式系统的通信接口?A. USBB. HDMIC. VGAD. 所有以上8. 嵌入式系统中的中断处理机制主要用于:A. 程序调试B. 系统启动C. 任务调度D. 错误检测9. 以下哪个不是嵌入式系统的应用领域?A. 工业控制B. 消费电子C. 桌面计算D. 汽车电子10. 嵌入式系统的开发流程通常包括哪些阶段?A. 需求分析B. 系统设计C. 编码与测试D. 所有以上答案:1. A2. B3. B4. A5. B6. D7. D8. C9. C10. D二、多项选择题(每题3分,共15分)11. 嵌入式系统设计时需要考虑的非功能性需求包括:A. 性能B. 可靠性C. 安全性D. 可维护性12. 以下哪些是嵌入式系统开发中的编程语言?A. CB. C++C. JavaD. Python13. 在嵌入式系统中,哪些因素会影响系统的功耗?A. 处理器的运行频率B. 内存的使用量C. 外设的使用D. 所有以上14. 嵌入式系统的软件架构通常包括:A. 硬件抽象层B. 操作系统内核C. 设备驱动程序D. 应用程序15. 以下哪些是嵌入式系统的调试工具?A. 逻辑分析仪B. 仿真器C. 调试器D. 编译器答案:11. ABCD12. ABC13. D14. ABCD15. ABC三、简答题(每题5分,共10分)16. 简述嵌入式系统的实时性要求。
嵌入式系统考试试题及答案

嵌入式系统考试试题及答案一、选择题1、嵌入式系统是指哪些设备?A.智能手机B.平板电脑C.个人电脑D.所有电子设备答案:D.所有电子设备解释:嵌入式系统是指嵌入在其它设备中的小型计算机系统,它们通常具有特定的功能和用途,例如控制机械、电子设备等。
因此,所有电子设备都可以看作是嵌入式系统的一种。
2、嵌入式系统的主要特点是什么?A.体积小B.功耗低C.处理能力强D.以上都是答案:D.以上都是解释:嵌入式系统通常具有体积小、功耗低、处理能力强等特点,这些特点使得它们能够适应各种不同的应用场景。
3、下面哪个不是嵌入式系统的应用?A.手机语音助手B.智能家居控制C.汽车发动机控制D.超级计算机答案:D.超级计算机解释:超级计算机是一种大型计算机系统,主要用于科学计算、数据分析等高性能计算领域,与嵌入式系统的应用场景不同。
4、嵌入式系统开发需要哪些技能?A.硬件设计B.软件编程C.系统集成D.以上都是答案:D.以上都是解释:嵌入式系统开发需要具备硬件设计、软件编程和系统集成等技能,因为嵌入式系统需要与具体的硬件设备进行交互,同时需要进行软件编程来实现特定的功能。
5、下面哪个是嵌入式系统开发的主要语言?A. C语言B. C++语言C. Java语言D. Python语言答案:A. C语言解释:C语言是嵌入式系统开发的主要语言之一,因为它具有高效的性能和直接访问硬件的能力,适合用于编写嵌入式系统的底层代码。
嵌入式系统是现代电子技术中非常重要的一部分,它们广泛用于各种领域,如工业控制、智能家居、医疗设备等。
因此,学习嵌入式系统的知识对于电子工程专业的学生来说是非常重要的。
在这里,我们提供了一些嵌入式系统期末考试的题目和答案,以帮助学生们更好地理解嵌入式系统的基本概念和原理。
解释:嵌入式系统通常具有小型化、快速化和智能化的特点,而巨型化并不是嵌入式系统的特点。
解释:嵌入式系统通常使用低级编程语言,如C语言和汇编语言,而Python语言通常用于高级编程和脚本编写,并不是嵌入式系统常用的编程语言。
嵌入式练习题附部分答案
选择题1.W3C制定了同步多媒体集成语言规范,称为____规范。
A. XMLB. SMILC. VRMLD. SGML##2.________完全把系统软件和硬件部分隔离开来,从而大大提高了系统的可移植性。
A. 硬件抽象层B. 驱动映射层C. 硬件交互层D. 中间层##A3.在C语言中,设有数组定义:char array[]="China"; 则数据array 所占用的空间为______。
A. 4个字节B. 5个字节C. 6个字节D. 7个字节##C4.对某一寄存器某几位清零,可用一条指令_______来实现。
A. ANDB. ORC. NOTD. AOR##A5.实时操作系统(RTOS)内核与应用程序之间的接口称为________。
A. 输入/输出接口B. 文件系统C. APID. 图形用户接口##C6.在操作系统中,Spooling技术是用一类物理设备模拟另一类物理设备的技术,实现这种技术的功能模块称做____。
A. 可林斯系统B. 斯普林系统C. 图灵机系统D. 虚拟存储系统##7.文件系统的主要功能是______。
A. 实现对文件按名称存取B. 实现虚拟存储器C. 提高外村的读写速度D. 用于保护系统文档##8.在CPU和物理内存之间进行地址转换时,________将地址从虚拟(逻辑)地址空间映射到物理地址空间。
A. TCBB. MMUC. CacheD. DMA##9.以下叙述中,不符合RISC指令系统特点的是______。
A. 指令长度固定,指令种类少B. 寻址方式种类丰富,指令功能尽量增强C. 设置大量通用寄存器,访问存储器指令简单D. 选取使用频率较高的一些简单指令##10.在操作系统中,除赋初值外,对信号量仅能操作的两种原语是____。
A. 存操作、取操作B. 读操作、写操作C. P操作、V操作D. 输入操作、输出操作11.在面向对象系统中,用______关系表示一个较大的“整体”包含一个或多个较小“部分”的类。
嵌入式试题及部分答案
下面哪种操作系统不属于商用操作系统( B )。
A. windows xpB. LinuxC. VxWorksD. WinCE下面哪点不是嵌入式操作系统的特点。
( C )A. 内核精简B. 专用性强C. 功能强大D. 高实时性下面哪种不属于嵌入式系统的调试方法。
( D )A. 模拟调试B. 软件调试C. BDM/JTAG调试D. 单独调试在嵌入式ARM处理器中,下面哪种中断方式优先级最高。
( A )A. ResetB. 数据中止C. FIQD. IRQNAND FLASH和NOR FLASH的区别正确的是。
( D )A. NOR的读速度比NAND稍慢一些B. NAND的写入速度比NOR慢很多C. NAND的擦除速度远比NOR的慢D.大多数写入操作需要先进行擦除操作下面哪种嵌入式操作系统很少用在手机上。
( D )A. SymbianB. linuxC. Win CED. VxWorks0X17&0X11的运算结果是。
( A )A.0X01 B.0X11C.0X17D.0X07以下哪种方式不属于文件系统的格式。
( B )A.FATB.DOSC.NTFSD.E XT系统响应时间和作业吞吐量是衡量计算机系统性能的重要指标。
对于一个持续处理业务的系统而言,( B )表明其性能越好。
A.响应时间越短,作业吞吐量越小B.响应时间越短,作业吞吐量越大C.响应时间越长,作业吞吐量越大D.响应时间不会影响作业吞吐量下面关于计算机存储原理说法错误的是( B )。
A. 存储器由大量可以存储二进制数据的存储单元组成B. 数据总线从存储器中获取数据的过程称为写操作C. 程序执行时,读取指令是指计算机自动从存储器中取出一条指令D. 虚拟存储技术缓解主存容量小的矛盾下面关于操作系统的叙述不正确的是()。
A. 操作系统管理系统全部硬件资源、软件资源和数据资源B. 操作系统是最靠近硬件的一层应用软件C. 操作系统是用户与计算机的接口D. 操作系统是程序与数据的集合虚拟存储器的作用是允许程序直接访问比内存更大的地址空间,它通常使用( B )作为它的一个主要组成部分。
嵌入式系统试题及答案
嵌入式系统试题及答案一、单项选择题(每题2分,共20分)1. 嵌入式系统的特点是()。
A. 体积小、成本低、功能强B. 体积大、成本高、功能弱C. 体积小、成本低、功能弱D. 体积大、成本高、功能强答案:A2. 以下哪个不是嵌入式系统的组成部分?()A. 嵌入式微处理器B. 嵌入式操作系统C. 通用操作系统D. 嵌入式软件答案:C3. 嵌入式系统通常用于()。
A. 个人计算机B. 服务器C. 家用电器D. 网络设备答案:C4. 在嵌入式系统中,以下哪个不是常用的编程语言?()A. C语言B. C++C. JavaD. Python答案:D5. 嵌入式系统的开发流程不包括以下哪个步骤?()A. 需求分析B. 系统设计C. 系统测试D. 系统销售答案:D6. 以下哪个是嵌入式系统的硬件平台?()A. 单片机B. 个人电脑C. 服务器D. 工作站答案:A7. 嵌入式系统的实时性要求通常()。
A. 非常高B. 一般C. 非常低D. 可有可无答案:A8. 以下哪个不是嵌入式系统的开发工具?()A. 编译器B. 调试器C. 编辑器D. 游戏机答案:D9. 嵌入式系统通常不用于以下哪个领域?()A. 汽车电子B. 移动通信C. 航空航天D. 办公自动化答案:D10. 以下哪个是嵌入式系统的软件平台?()A. 操作系统B. 数据库系统C. 网络服务器D. 办公软件答案:A二、多项选择题(每题3分,共15分)1. 嵌入式系统的开发需要考虑以下哪些因素?()A. 系统稳定性B. 系统安全性C. 系统可扩展性D. 系统成本答案:ABCD2. 嵌入式系统的硬件设计通常包括以下哪些部分?()A. 微处理器B. 存储器C. 电源管理D. 显示设备答案:ABCD3. 嵌入式系统的软件设计通常包括以下哪些部分?()A. 操作系统B. 应用程序C. 驱动程序D. 用户界面答案:ABCD4. 以下哪些是嵌入式系统的开发工具?()A. 交叉编译器B. 版本控制系统C. 性能分析工具D. 游戏机答案:ABC5. 嵌入式系统在以下哪些领域有广泛应用?()A. 工业控制B. 消费电子C. 医疗设备D. 办公自动化答案:ABC三、判断题(每题2分,共10分)1. 嵌入式系统与通用计算机系统没有区别。
嵌入式练习题附部分答案

B.协作图
C.类图
D.状态图
35.RS-232(串行通信总线的电气特性要求总线信号采用
A.正逻辑
B.负逻辑
C.高电平
D.低电平
##
36.编译程序对高级语言进行编译时,需要该程序的地址空间中为变
量指定地址,这种地址成为。
A.逻辑地址
B.物理地址
C.接口地址
D.线性地址
##
37.的做法不利于嵌入式应用软件的移植。
存在的整体/部分形式的关联关系。
A.依赖关系
B.聚合关系
C.泛化关系
D.实现关系
##
27.下面不是操作系统中调度程序所采用的调度算法。
A.先来先服务(FCFS)
B.先进先出(FIFO)
C.时间片轮转调度
D.优先级调度
##
28执行C程序代码int a=1,b=0,c=0;int d=(++a)*(c=1);后,a,b,c,d的 值分别为。
C.形参变量所占用的内存单元位于堆中
D.如果形参是数组名,则传递的是每个数组元素的值
56.以下关于硬件抽象层的论述,不合适的是(
A.采用硬件抽象层可以大大提高系统的移植性
B.采用硬件抽象层可以大大提高系统的运行效率
C.采用硬件抽象层可以缩短系统的测试周期
D.采用硬件抽象层有助于提高系统的可靠性
##B
B.提供描述文件抽象的程序接口
C.文件存储在磁盘或其他不易失的存储介质上
41.在过程式程序设计(①)、数据抽象程序设计(②)、面向对象程
序设计(③)、泛型(通用)程序设计(④)中,C++语言支持
A.①
B.②③
C.③④
嵌入式系统开发测试题(含答案)

嵌入式系统开发测试题(含答案)一、单选题(共100题,每题1分,共100分)1、Make预置了一些内部宏,其中$@表示A、以上都不是B、没有扩展名的当前目标文件C、当前目标文件最近更新的文件名正确答案:A2、关于U-Boot,下列说法错误的是()A、支持的处理器有ARM、MNPSB、是遵循GPL条款的开放源码项目C、支持的操作系统有LINUX、QNX正确答案:A3、Makefile是()A、调试器B、编辑器C、项目管理器正确答案:C4、C语言文件预处理生成哪个后缀的文件A、iB、SC、o正确答案:A5、直接编译进内核,又称()。
A、下载文件B、静态连接C、动态连接正确答案:B6、实时在线仿真是一种用于替代目标上()的设备A、CPUB、GPUC、NOU正确答案:A7、GDB软件是()。
A、调试器B、编译器C、文本编辑器正确答案:A8、嵌入式系统设计的重要特点是()多样化A、技术B、应用C、操作正确答案:A9、ARM的工作模式有?A、非特权模式和特权模式B、特权模式C、非特权模式正确答案:A10、嵌入式操作系统的特点不包括()。
A、有一定的实时性B、强交互性C、可裁剪正确答案:B11、TCP/IP参考模型不包括()A、表示层B、应用层C、传输层正确答案:A12、Linux内核的功能不包含下面哪种()A、处理机管理B、内存管理C、进程管理正确答案:A13、下列CPSR寄存器标志位的作用说法错误的是A、V:借位B、C:进位C、Z:零正确答案:A14、()显示屏是利用有机电致发光二极管制成的显示屏。
A、OLEDB、ABCDC、EFGH正确答案:A15、动态链接是指程序运行时需要调用共享库文件,其后缀为()A、aB、cC、so正确答案:C16、MCU偏重于()A、信号处理B、控制正确答案:B17、()是指:在宿主机上进行软件编辑、编译、链接等,并生成能够在目标机上运行的可执行程序的过程。
A、交叉编辑B、交叉开发C、交叉编译正确答案:C18、Flash程序烧写时,需准备好的软件不包括()。
arm嵌入式系统试题及标准答案
arm嵌入式系统试题及标准答案一、选择题1. ARM的英文全称为()。
A. Advanced RISC MachinesB. Advanced Reduced Instruction Set ComputingC. Advanced Risk Instruction Set MachinesD. Advanced Reduced Innovative System Machines 正确答案:A2. ARM的发展平台主要有()。
A. CortexB. Keil MDKC. MbedD. All of the above正确答案:D3. ARM架构中,RISC指的是()。
A. Reduced Instructions for Simple ComputingB. Reduced Instruction Set ComputingC. Reduced Instructions for Speedy ComputingD. Reduced Innovative System Computing正确答案:B4. ARM的家族庞大,主要分为()。
A. ARMv1-ARMv5B. ARMv6-ARMv7C. ARMv8-ARMv12D. ARMv12-ARMv16正确答案:B5. 在ARM处理器中,Cortex-A系列主要针对()。
A. 浮点运算B. 实时性C. 安全性D. 性能正确答案:D二、填空题1. ARM架构的特点之一是指令集精简,采用()指令集。
正确答案:RISC(Reduced Instruction Set Computing)2. ARM处理器的体积小、功耗低的特点使得其在()领域得到广泛应用。
正确答案:嵌入式系统3. ARM主要设计并销售()和相关的软件开发工具、IP核等。
正确答案:处理器4. Keil MDK是由ARM公司开发的()。
正确答案:集成开发环境5. ARM Cortex-M系列处理器适用于对能耗和成本有严格要求的()。
嵌入式习题集(含答案)
1、 ARM 微处理器有 7种工作模式,它们分为两类 非特权模式 、 特权模式 。
其中用户模式属于 非特权模式ARM 处理器有两种总线架构,数据和指令使用同一接口的是 冯诺依曼 ,数据和指令分开使用不同接口的是 哈佛结4、 ARM 微处理器复位后,PC 的地址通常是 0x0 ,初始的工作模式是Supervisor 。
5、 编译链接代码时,有两种存储代码和数据的字节顺序,一种是 小端对齐 ,另一种是大端对齐计算机有CISC 和RISC 两种类型,以ARM 微处理器为核心的计算机属于 RISC 类型,其指令长度是 定长的1、 目前使用的嵌入式操作系统主要有哪些?请举出六种较常用的。
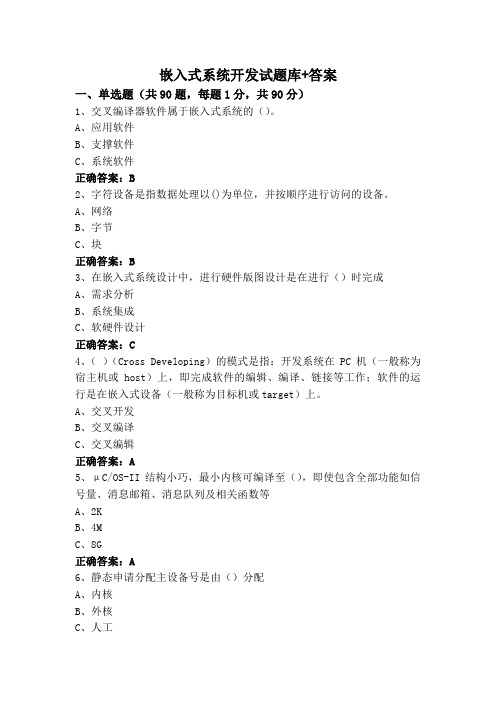
Windows CE/Windows Mobile 、VxWork 、Linux 、uCos 、Symbian 、QNX 任选六2、ARM 系统中的堆栈有四种,如下图。
请按图标出四种堆栈的类型。
A TPCS 编程规范约定使用的堆栈是哪一种?答:FD 、FA 、ED 、EA 。
A TPCS 编程规范约定使用的堆栈是FD3、Boot Loader 在嵌入式系统中主要起什么作用?完成哪些主要的工作?答:Boot Loader 是在嵌入式系统复位启动时,操作系统内核运行前,执行的一段程序。
通过Boot Loader ,初始化硬件设备,建立内存和I/O 空间映射图,为最终加载操作系统内核调整好适当的系统软硬件环境。
4、搭建嵌入式开发环境,连接目标板,一般使用什么通信接口连接?在Windows 主机上使用什么软件建立连接?在Linux 主机上使用什么软件建立连接?1、 答:RS-232,以太网口、并口在Windows 主机上使用超级终端软件在Linux 主机上使用Minicom 软件5嵌入式开发环境主要包括哪些组件?嵌入式系统开发需要交叉编译和在线调试的开发环境,主要包括● 宿主机● 目标机(评估电路板)● 基于JTAG 的ICD 仿真器、或调试监控软件、或在线仿真器ICE● 运行于宿主机的交叉编译器和链接器、以及开发工具链或软件开发环境● 嵌入式操作系统7 目前使用的嵌入式操作系统主要有哪些?请举出六种较常用的。
嵌入式系统开发试题库+答案
嵌入式系统开发试题库+答案一、单选题(共90题,每题1分,共90分)1、交叉编译器软件属于嵌入式系统的()。
A、应用软件B、支撑软件C、系统软件正确答案:B2、字符设备是指数据处理以()为单位,并按顺序进行访问的设备。
A、网络B、字节C、块正确答案:B3、在嵌入式系统设计中,进行硬件版图设计是在进行()时完成A、需求分析B、系统集成C、软硬件设计正确答案:C4、()(Cross Developing)的模式是指:开发系统在PC机(一般称为宿主机或host)上,即完成软件的编辑、编译、链接等工作;软件的运行是在嵌入式设备(一般称为目标机或target)上。
A、交叉开发B、交叉编译C、交叉编辑正确答案:A5、μC/OS-II结构小巧,最小内核可编译至(),即使包含全部功能如信号量、消息邮箱、消息队列及相关函数等A、2KB、4MC、8G正确答案:A6、静态申请分配主设备号是由()分配A、内核B、外核C、人工正确答案:C7、嵌入式系统是以应用为中心,以()为基础A、计算机技术B、硬件C、软件正确答案:A8、以下那一个是字符设备注册函数A、register_chrdevB、request_irqC、unregister_chrdev正确答案:A9、在Linux中,哪个函数用于将设备驱动程序注册到内核中?A、register_chrdev()B、register_driver()C、register_device()正确答案:A10、软件的()和软件的性能通常是矛盾的,通常以损失某些特性情况下的优化性能为代价。
A、通用性B、适应性C、复杂性正确答案:A11、()是指把系统的软件、硬件和执行装置集成在一起,进行调试,发现并改进设计过程中的错误。
A、系统集成B、系统测试C、集成正确答案:A12、比较典型的是将Flash分成()个分区,分别用于保存引导程序(BootLoader)、启动参数、系统内核、根文件系统和应用程序等,A、5B、6C、7正确答案:A13、S3C2410X有()个外部中断源。
嵌入式考试题目及答案
嵌入式考试题目及答案一、单选题(每题2分,共20分)1. 嵌入式系统是指()。
A. 嵌入到其他系统中的专用计算机系统B. 嵌入到其他系统中的通用计算机系统C. 嵌入到其他系统中的操作系统D. 嵌入到其他系统中的硬件系统答案:A2. 以下哪个不是嵌入式系统的典型应用领域?()A. 消费电子B. 工业控制C. 航空航天D. 个人电脑答案:D3. 在嵌入式系统中,以下哪个不是常用的处理器类型?()A. 微控制器(MCU)B. 数字信号处理器(DSP)C. 微处理器(MPU)D. 网络处理器(NP)答案:D4. 以下哪个不是嵌入式系统的开发工具?()A. 编译器B. 调试器C. 仿真器D. 打印机答案:D5. 在嵌入式系统中,以下哪个不是操作系统的功能?()A. 任务调度B. 内存管理C. 文件系统D. 网络通信答案:D6. 以下哪个不是嵌入式系统的硬件组成?()A. 处理器B. 存储器C. 输入/输出设备D. 显示器答案:D7. 在嵌入式系统中,以下哪个不是软件组成?()A. 操作系统B. 应用程序C. 驱动程序D. 打印机驱动答案:D8. 以下哪个不是嵌入式系统的开发流程?()A. 需求分析B. 系统设计C. 编码D. 测试答案:D9. 在嵌入式系统中,以下哪个不是调试技术?()A. 断点B. 单步执行C. 代码覆盖率分析D. 性能优化答案:D10. 以下哪个不是嵌入式系统的可靠性要求?()A. 容错性B. 可预测性C. 可维护性D. 可扩展性答案:D二、多选题(每题3分,共15分)11. 嵌入式系统的特点是()。
A. 实时性B. 专用性C. 可扩展性D. 低功耗答案:ABD12. 嵌入式系统的开发工具包括()。
A. 编译器B. 调试器C. 仿真器D. 打印机答案:ABC13. 嵌入式系统的硬件组成包括()。
A. 处理器B. 存储器C. 输入/输出设备D. 显示器答案:ABC14. 嵌入式系统的软件组成包括()。
嵌入式试题集(含答案)
1、ARM微处理器有 7种工作模式,它们分为两类非特权模式、特权模式。
其中用户模式属于非特权模式2、ARM支持两个指令集, ARM核因运行的指令集不同,分别有两个状态ARM 、Thumb,状态寄存器CPSR的 T 位反映了处理器运行不同指令的当前状态3、ARM核有多个寄存器,其中大部分用于通用寄存器,有小部分作为专用寄存器,R15 寄存器用于存储PC,R13通常用来存储SP 。
ARM处理器有两种总线架构,数据和指令使用同一接口的是冯诺依曼,数据和指令分开使用不同接口的是哈佛结构4、ARM微处理器复位后,PC的地址通常是 0x0 ,初始的工作模式是Supervisor 。
5、ARM微处理器支持虚拟内存,它是通过系统控制协处理器CP15 和MMU(存储管理部件)来进行虚拟内存的存储和管理。
当系统发生数据异常和指令领取异常时,异常处理程序透过嵌入式操作系统的内存管理机制,通过MMU交换物理内存和虚拟内存的页面,以保证程序正常执行。
6、编译链接代码时,有两种存储代码和数据的字节顺序,一种是小端对齐,另一种是大端对齐。
7、构建嵌入式系统开发环境的工具链有多种,其中开放源码的工具链是GNU工具链,ARM公司提供的工具链是ADS工具链计算机有CISC和RISC两种类型,以ARM微处理器为核心的计算机属于 RISC类型,其指令长度是定长的8、目前使用的嵌入式操作系统主要有哪些?请举出六种较常用的。
Windows CE/Windows Mobile、VxWork、Linux、uCos、Symbian、QNX任选六9、Boot Loader在嵌入式系统中主要起什么作用?完成哪些主要的工作?答:Boot Loader是在嵌入式系统复位启动时,操作系统内核运行前,执行的一段程序。
通过Boot Loader,初始化硬件设备,建立内存和I/O空间映射图,为最终加载操作系统内核调整好适当的系统软硬件环境。
10、搭建嵌入式开发环境,连接目标板,一般使用什么通信接口连接?在Windows主机上使用什么软件建立连接?在Linux主机上使用什么软件建立连接?答:RS-232,以太网口、并口在Windows主机上使用超级终端软件,在Linux主机上使用Minicom软件11、嵌入式开发环境主要包括哪些组件?嵌入式系统开发需要交叉编译和在线调试的开发环境,主要包括●宿主机●目标机(评估电路板)●基于JTAG的ICD仿真器、或调试监控软件、或在线仿真器ICE●运行于宿主机的交叉编译器和链接器、以及开发工具链或软件开发环境●嵌入式操作系统12、在进行基于ARM核的嵌入式系统软件开发时,调用如下函数:int do_something(int arg1,void *arg2,char arg3,int *arg4)这四个参数通过什么方式从调用程序传入被调函数?根据ATPCS编程规范,调用函数和子程序通过R0——R3四个寄存器传递参数,超过四个参数使用堆栈传递。
嵌入式系统试题及答案

嵌入式系统试题及答案一、选择题1. 嵌入式系统通常指的是:A. 个人计算机B. 服务器C. 智能手机D. 家用电器中的控制单元答案:D2. 以下哪个不是嵌入式系统的硬件组成部分?A. 微处理器B. 存储器C. 操作系统D. 打印机答案:D3. 嵌入式系统的软件开发通常使用:A. 汇编语言B. C语言C. Java语言D. HTML答案:B4. 下列哪个是实时操作系统的特点?A. 多任务B. 多用户C. 网络功能D. 确定性响应时间答案:D5. 嵌入式系统中的中断处理机制主要用于:A. 系统启动B. 错误检测C. 任务调度D. 事件响应答案:D二、填空题6. 嵌入式系统的设计需要考虑______、______和______三个主要方面。
答案:性能、功耗、成本7. 嵌入式系统中的______是指系统在规定的时间内完成特定功能的能力。
答案:实时性8. 在嵌入式系统中,______是指软件与硬件的紧密结合。
答案:系统级集成9. 嵌入式系统的______是指系统在没有外部干预的情况下,能够独立完成预定功能的能力。
答案:自主性10. 嵌入式系统的______是指系统在面对各种环境变化时,仍能保持稳定运行的能力。
答案:鲁棒性三、简答题11. 简述嵌入式系统与通用计算机系统的主要区别。
答案:嵌入式系统与通用计算机系统的主要区别在于:嵌入式系统是为特定应用而设计的,通常具有较低的功耗、较小的体积和成本,以及高度的实时性。
而通用计算机系统则具有更广泛的应用范围,通常不强调实时性,功耗和体积也相对较大。
12. 解释什么是嵌入式系统的中断机制,并说明其重要性。
答案:嵌入式系统的中断机制是一种允许外部事件或内部条件触发中断服务程序执行的机制。
它的重要性在于能够使系统快速响应外部事件,提高系统的实时性和可靠性。
四、论述题13. 论述嵌入式系统在工业自动化领域的应用及其优势。
答案:嵌入式系统在工业自动化领域的应用非常广泛,包括但不限于机器人控制、生产线监控、数据采集和处理等。
嵌入式期末考试试题及答案

嵌入式期末考试试题及答案一、选择题(每题2分,共20分)1. 在嵌入式系统中,通常使用哪种类型的处理器?A. CPUB. GPUC. DSPD. FPGA答案:C2. 以下哪个不是嵌入式系统的特点?A. 实时性B. 专用性C. 通用性D. 可靠性答案:C3. 在嵌入式系统中,操作系统的作用是什么?A. 管理硬件资源B. 提供用户界面C. 增加系统复杂性D. 减少系统性能答案:A4. 以下哪个是嵌入式系统的典型应用?A. 个人电脑B. 智能手机C. 服务器D. 工作站答案:B5. 在嵌入式系统中,中断的作用是什么?A. 启动程序B. 暂停程序C. 切换程序D. 终止程序答案:C6. 以下哪个是嵌入式系统开发中常用的编程语言?A. JavaB. PythonC. CD. HTML答案:C7. 以下哪个是嵌入式系统中的存储设备?A. 硬盘B. 固态硬盘C. EEPROMD. 光盘答案:C8. 在嵌入式系统中,什么是看门狗定时器?A. 用于监控系统时间的定时器B. 用于防止系统崩溃的定时器C. 用于定时执行任务的定时器D. 用于系统启动的定时器答案:B9. 以下哪个不是嵌入式系统的开发工具?A. 编译器B. 仿真器C. 调试器D. 浏览器答案:D10. 在嵌入式系统中,什么是固件?A. 硬件B. 软件C. 介于硬件和软件之间的程序D. 操作系统答案:C二、简答题(每题10分,共30分)1. 解释什么是嵌入式系统,并给出至少两个嵌入式系统的例子。
嵌入式系统是一种专用的计算机系统,它被设计用来执行特定的任务。
它通常包含一个微处理器,存储器,输入/输出接口等,并且可能包含一个或多个操作系统。
嵌入式系统的例子包括智能手机和汽车的电子控制单元。
2. 描述嵌入式系统中的中断处理机制。
中断处理机制是嵌入式系统中的一种功能,它允许系统在执行当前任务时,响应外部或内部事件。
当中断发生时,系统会暂停当前任务,保存当前状态,然后跳转到中断服务程序(ISR)执行相应的处理。
嵌入式习题答案.doc
1.何为计算机体系结构?答:计算机体系结构是对计算机较高层次的抽象,摆脱具体电路的实现而主要着眼于计算机系统的逻辑特征、原理特征、结构特征和功能特征的抽象。
2.什么是处理器指令?什么是处理器的指令系统?答:计算机的指令就是CPU执彳亍某种操作的命令,它以二进制编码的方式存在,每一条指令都对应着CPU要完成的操作。
一台计算机中所有机器指令的集合称为CPU的指令系统。
3.什么是RISC?什么是CISC?简述它们的特点与差别。
答:RISC即精简指令计算机体系,它具有精简的指令系统,简单的逻辑电路设计,能够以更快的速度执彳丁操作。
CISC即复杂指令计算机体系,它的指令系统中含有大量的类似于高级程序设计语言的复合功能指令,增加了指令周期及硬件的复杂度,执行效率低下。
4.ARM7处理器是几级流水线?在ARM7处理器中,“PC指向的是下一条要执行的命令”这何话对吗?为什么?答:是三级流水线。
这句话不对,因为存在流水线,指令码即使送到处理器也未必被执行。
5.ARM处理器的工作状态分为哪几种?ARM处理器又是怎么定义和标志的?答:工作状态分为“ARM状态”和“Thumb状态”。
“ARM状态”下,处理器执行32位的指令码,在“Thumb状态”下,处理器执行16位的指令码。
ARM处理器内部的当前程序状态寄存器CPSR 的T位为“1”时,处理器工作在Thumb I作状态,当T位为“0”时,工作在ARM状态。
6.ARM7 TDMI支持哪几种指令集,各有什么特点?ARM7处理器在ARM状态下执行ARM指令集指令码,在Thumb状态下执彳亍Thumb指令集指令码。
ARM指令集指令丰富,功能强大;Thumb指令集指令精简,功能紧凑。
ARM指令集指令码长为32位,Thumb指令集指令码长为16位,但它们都支持32位运算指令。
7.ARM7处理器有哪些工作模式?不同工作模式下CPRS寄存器的模式位如何设定?答:ARM7处理器工作模式有:用户模式,fiq模式,irq模式,管理模式,中止模式,未定义模&描述ARM7处理器的内部寄存器结构,并分别说明R13、R14、R15寄存器的作用。
嵌入式系统开发模拟试题(附参考答案)

嵌入式系统开发模拟试题(附参考答案)一、单选题(共100题,每题1分,共100分)1、共享型函数库(动态链接库)的后缀为()A、aB、cC、so正确答案:C2、关于嵌入式系统,以下说法不正确的是()A、主要应用于控制领域,兼顾数据处理B、主要用于数据处理,兼顾控制领域C、嵌入式系统功耗低正确答案:B3、下面交互设备常由嵌入式系统采用的是()A、以上都是B、小键盘C、按钮D、触摸屏正确答案:A4、A/D是将()转换成数字信号的意思。
A、模拟信号B、虚拟信号C、物理信号正确答案:A5、嵌入式系统的实时性可分为软实时性和()。
A、硬实时性B、截止时限C、软实时性正确答案:A6、Linux I/O 操作默认是:A、同步非阻塞模式B、同步阻塞模式C、异步阻塞模式正确答案:B7、()(GNU C Compiler的简称)是一组编译工具的总称,主要任务是预处理和编译,并且提供与编译器相关的运行库的支持。
A、GCCB、abcC、GDD正确答案:A8、μC/OS-II是一个()、源码开放、结构小巧、抢占式的实时多任务内核,主要面向中小型嵌入式系统,具有执行效率高、占用空间小、()、实时性能优良和可扩展性强等特点。
A、可裁剪,可移植性强B、可裁剪,可移植性弱C、不可裁剪,可移植性强正确答案:A9、当()进行时,可移植性是要重点考虑的问题A、数学建模B、嵌入式软件开发C、电路设计正确答案:B10、以下那个选项不是驱动程序的组成()。
A、终端服务子程序B、自动配置和初始化子程序C、服务于I/O接口的子程序正确答案:A11、vivi(下载模式)启动Linux核心的命令是()。
A、bootB、partC、load正确答案:A12、不属于字符设备的是()A、简单按键B、U盘C、触摸屏正确答案:B13、设计软件子系统:软件总体设计、()设计。
A、函数设计B、硬件总体C、模块设计正确答案:C14、交叉()是指:在宿主机上进行软件编辑、编译、链接等,并生成能够在目标机上运行的可执行程序的过程。
嵌入式笔试题及答案
嵌入式笔试题及答案一、选择题(每题2分,共40分)1. 下面哪个不是嵌入式系统的特点?A. 实时性强B. 资源受限C. 包含网络通信功能D. 电源自主供电答案:C2. 嵌入式系统的一个主要应用领域是:A. 医疗设备B. 大型工业控制C. 智能手机D. 电子游戏答案:A3. 在嵌入式系统开发中,通常使用哪种编程语言?A. PythonB. JavaC. C/C++D. JavaScript答案:C4. 嵌入式系统的主要硬件组成部分是:A. 处理器、内存、外设B. 显示屏、键盘、鼠标C. 摄像头、扬声器、麦克风D. 电源、机箱、风扇答案:A5. 在嵌入式系统开发中,以下哪个是常用的实时操作系统?A. WindowsB. LinuxC. AndroidD. RTOS答案:D...二、编程题(共60分)请使用C语言完成以下题目:1. 编写一个函数,判断一个数是否为素数。
函数原型为: int isPrime(int n);答案:```c#include <stdio.h>int isPrime(int n) {int i;for (i = 2; i <= n/2; i++) {if (n % i == 0) {return 0; // 不是素数}}return 1; // 是素数}int main() {int n;printf("请输入一个整数:");scanf("%d", &n);if (isPrime(n)) {printf("%d是素数\n", n);} else {printf("%d不是素数\n", n);}return 0;}```2. 编写一个函数,计算n的阶乘。
函数原型为: int factorial(int n);答案:```c#include <stdio.h>int factorial(int n) {if (n == 0) {return 1;} else {return n * factorial(n - 1);}}int main() {int n;printf("请输入一个整数:");scanf("%d", &n);printf("%d的阶乘为:%d\n", n, factorial(n));return 0;}```...三、简答题(每题10分,共30分)1. 简述嵌入式系统的优缺点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
嵌入式系统原理及应用作业题答案第1章嵌入式系统概述1. 什么是嵌入式系统?嵌入式系统的组成?答:嵌入式系统是以应用为中心,以计算机技术为基础,并且软硬件可裁剪,适用于应用系统对功能、可靠性、成本、体积、功耗有严格要求的专用计算机系统。
组成:嵌入式处理器、外围设备、操作系统、应用软件。
2. 典型的嵌入式处理器有哪些?3. 答:微处理器、微控制器、DSP处理器、片上系统SOC。
4. 典型的RTOS操作系统有哪些?5. 答:嵌入式LinUX、卩CLinUX、WindoWS Embedded CE、WindoWS Embedded ComPaCt 7 > μC/OS-II > μC/OS-III、VXWorks、eCos 等。
6. 列举身边的嵌入式应用产品?7. 嵌入式系统的设计可以分成四个阶段:需求分析、架构设计和概要设计、详细设计和开发、测试反馈。
第2章COrteX-M体系结构8. ARM COrteX系统的处理器分为: A 、__________ R ____ 、____ M ____ 。
9. ARM COrteX-M3为32位微控制器,请问32位指的是CPlJ字长。
10. 3、COrteX-M3处理器能够以小端格式或大端格式访问存储器中的数据字,而访问代码时始使用小端格式______11. ARM COrteX-M3体系结构采用哈佛总线结构,拥有独立的指令总线和数据总线,可以让取指与数据访问并行进行。
12. CM3寄存器分为通用寄存器,包括R0~R15和特殊功能寄存器,包括程序状态寄存器、异常屏蔽寄存器、控制寄存器。
13. 寄存器R13是堆栈指针寄存器。
14. 寄存器R14是程序连接寄存器。
15. 寄存器R15是程序PG16. CM3的堆栈指针分为__MSP__ _=PSP r O存储器堆栈堆栈分为:向上生长(即向高地址方向生长)的递增堆栈;向下生长(即向低地址方向生长),称为递减堆栈。
堆栈指针指向最后压入堆栈的有效数据项,称为满堆栈;堆栈指针指向下一个数据项放入的空位置,称为空堆栈。
试判断CM3属于递减堆栈堆栈和满堆栈堆栈。
17. 在CM3中记录程序状态的寄存器是=XPSR= 。
都分别有些什么状态—应用状态、中断状态、可执状态。
18. PRIMASK寄存器的作用是_中断屏蔽寄存器_ o19. 寄存器CONTRO的作用是控制处理器工作级别及堆栈切换。
20. CM3支持的4GB存储空间被划分成:CODE片上RAM片上外设、片外RAM片外外设、内核私有6个区域。
21. CM沖有一个位绑定区分别位于片上RAM和片上外设区,其大小为1M字节,由32M字节空间的位绑定别名区来访问。
22. CM3支持1£种系统异常,和240种外设中断。
23. SySTiCk是一个___24 位的系统定时器。
通常的功能是_作为操作系统时钟__。
第3章STM32基础及最小系统设计24. STM32F103RBT7芯片的在片Flash存储器有128KB 字节,在片SRAM 存储器有20KB 字节。
25. STM32F103RBT7芯片工作时电源电压是 3.3 V。
26. STM32最小系统电路包含:MCU芯片、电源电路、时钟电路、复位电路和启动设置电路。
27. 连接在APB1 上的设备有:电源接口、备分接口、CAN、USB、I2C1、I2C2、UART2、UART3、SPI2、WatChDOg、Timer2、Timer3 和Timer4。
28. 连接在APB2 上的设备有:UART1、SPI1、TimerI、ADC1、ADC2、I/O ( PA〜PE,第二功能I/O)。
29. 假定STM32F103单片机外部振荡器是8MHz。
执行下列程序。
While(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET) ; // 等待PLL 就绪RCC_SYSCLKCOnfig(RCC_SYSCLKSOUrCe_PLLCLK); // 设置PLL 作为时钟源WhiIe(RCC_GetSYSCLKSource() != 0x08) ;// 等PLL 时钟源启动就绪}}请问,上述程序执行后,HCLK= 72MHZ ,PCLKI= 38MHZ ,PCLK2= 72MHZ ,30. 利用COrteX-M3内核的24位定时器(SySTiCk),定时10ms,请计算初值并写出初始化程序,SySTiCk配置函数:uint32_t SySTiCk_COnfig(Uint32_tticks) o假设HCLK的时钟是72MHz。
1答:初值=720000-1 o N 10ms,共中N是计数的次数,由于SySTiCk是减计数器,因此初值为720000-1。
72MVoid SySTiCkInit (VOid){SySTiCk_COnfig(720000-1);}第5章通用I/O结构及应用31. STM32F103微控制器的I/O端口有PA~PG,每组多达16 端口。
32. STM32F103微控制器的I/O端口的功能:通用输入/输出、中断功能、复用功能和重映射功能。
33. 请编程实现如图所示4只发光二极管流水。
/********************************************************//* 说明:PC8-PC15 连接LED********************************************************/#include "stm32f10x.h"#include "system_stm32f10x.h"#include "stm32f10x_gpiO.h"#include "stm32f10x_rcc.h"VOid DeIayMs( int n);/********************************************************/int main(vOid){GPIO」nitTypeDef GPIO_InitStrUCture;RCC_APB2PeriphClOckCmd(RCC_APB2Periph_GPIOC,ENABLE);GPIO_InitStrUCtUre.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_10|GPIO_Pin_11;GPIO_InitStrUCtUre.GPIO_MOde = GPIO_MOde_OUt_PP;GPIO_InitStrUCtUre.GPIO_SPeed = GPIO_SPeed_50MH z;GPIO_Init(GPIOC, & GPIO」nitStrUCtUre);GPIO_Write(GPIOC, OXFFFF);/******************************************************while(1){GPIO_ReSetBitS(GPIOC, GPIO_Pin_8);DeIayMS(500);GPIO_SetBitS(GPIOC, GPIO_Pin_8);GPIO_ReSetBitS(GPIOC, GPIO_Pin_9);DeIayMS(500);GPIO_SetBitS(GPIOC, GPIO_Pin_9);GPIO_ReSetBitS(GPIOC,GPIO_Pin_10);DeIayMS(500);GPIO_SetBitS(GPIOC, GPIO_Pin_10);GPIO_ReSetBitS(GPIOC,GPIO_Pin_11);DeIayMS(500);GPIO_SetBitS(GPIOC, GPIO_Pin_11);}34.请编程实现键控蜂鸣器,当按键KEYI按下时,蜂鸣器发声,再按下不发声,按键采用中断方式控制*******************************************************/*说明:KEY1->PA0;Buz->PB4按键采用中断,在中断服务程中取反PB4*******************************************************#include "stm32f10x.h"#include "system_stm32f10x.h"#include "stm32f10x_gpio.h"#include "stm32f10x_rcc.h"#include "stm32f10x_exti.h"#include "misc.h"中断第二级配置*****************/void NVIC_COnfigUration(void){NVIC_InitTyPeDef NVIC_InitStrUCture;NVIC_InitStrUCtUre.NVIC_IRQChanneI = EXTI0_IRQn;NVIC_InitStrUCtUre.NVIC_IRQChanneIPreemPtiOnPriority =0;NVIC_InitStrUCtUre.NVIC_IRQChanneISUbPriOrity = 0;NVIC_InitStrUCtUre.NVIC_IRQChanneICmd = ENABLE;NVIC_Init (&NVIC—lnitStructure);}中断第三级配置******************/voidEXTI_COnfigUration(void){EXTI_InitTypeDef EXTI_InitStrUCtUre;GPIO_EXTILineCOnfig(GPIO_PortSoUrceGPIOA,GPIO_PinSoUrce0);EXTLInitStrUCtUre.EXTLLine = EXTI_Line0;EXTI_InitStrUCtUre.EXTI_MOde =EXTI_MOde_InterrUpt;EXTLInitStrUCtUre.EXTLTrigger = EXTI_Trigger_Falling;EXTLInitStrUCtUre.EXTLLineCmd = ENABLE;EXTI_Init(&EXTI_lnitStrUCtUre);}按键初始化************************/void key_init(VOid){GPIO_lnitTypeDef GPIO」nitStrUCtUre;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_lnitStrUCtUre.GPIO_Pin = GPIO_Pin_0 ;GPIO_lnitStrUCtUre.GPIO_Mode = GPIO_Mode_IPU;GPIO_lnitStrUCtUre.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, & GPIO_InitStrUCtUre);}蜂鸣器端口初始化******************/void BUZZer_Init(VOid){GPIO_InitTypeDef GPIO」nitStrUCtUre;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);GPIO_PinRemaPCOnfig(GPIO_Remap_SWJ_NOJTRST,ENABLE);//PB4重映射//BUzzerGPIO_InitStrUCtUre.GPIO_Pin =GPIO_Pin_4;GPIO_lnitStrUCtUre.GPIO_Speed = GPIO_Speed_50MH z;GPIO_lnitStrUCtUre.GPIO_Mode = GPIO_Mode_OUt_PP;GPIO_Init(GPIOB, & GPIO_InitStrUCtUre);GPIO_ResetBits(GPIOB, GPI0_Pin_4);〃置低电平,关闭蜂鸣器}int main(void){key_init();BUZZer_Init();__set_PRIMASK(0x00); // 一级开关使能NVIC_COnfigUration();// 二级开关使能EXTI_COnfigUration();// 三级开关使能while(1) {; }嵌入式系统原理及应用作业题答案35. STM32F103定时器是16 位定时器。