图像处理中的标记分水岭分割算法
分水岭 算法
分水岭算法1. 简介分水岭算法(Watershed algorithm)是一种图像分割算法,可以将图像中的不同区域进行分离和标记。
它基于图像的灰度值和梯度信息,将图像看作一个地形地貌,并从低处向高处逐渐充满水,直到不同区域之间的水汇聚形成分割线。
该算法最初是由Belknap和Hoggan在1979年提出的,后来被广泛应用于计算机视觉领域,特别是在医学图像处理、目标检测和图像分析等方面。
2. 原理2.1 灰度变换在进行分水岭算法之前,需要对原始图像进行灰度变换。
这可以通过将彩色图像转换为灰度图像来实现。
灰度图像中的每个像素点都代表了原始彩色图像中相应位置的亮度值。
2.2 梯度计算接下来,需要计算灰度图像中每个像素点的梯度值。
梯度表示了亮度变化的速率,可以帮助我们找到不同区域之间的边界。
常用的梯度计算方法有Sobel、Prewitt和Scharr等算子。
这些算子对图像进行卷积操作,将每个像素点的梯度计算为其周围像素点的亮度差值。
2.3 标记初始化在进行分水岭算法之前,需要为每个像素点初始化一个标记值。
通常情况下,我们可以将背景区域标记为0,前景区域标记为正整数。
2.4 梯度图像处理接下来,我们将梯度图像中的每个像素点看作一个地形地貌中的一个位置,并将其灌满水。
初始时,所有像素点的水位都是0。
2.5 水汇聚从灰度最小值开始,逐渐增加水位直到灰度最大值。
在每次增加水位时,会发生以下情况: - 当前水位高于某个位置的梯度值时,该位置被认为是不同区域之间的边界。
- 如果两个不同区域之间存在连接路径,则会发生水汇聚现象。
此时需要将这两个区域合并,并更新合并后区域的标记值。
2.6 分割结果当水位达到最大值时,分割过程结束。
此时所有不同区域之间都有了明确的边界,并且每个区域都有了唯一的标记值。
3. 算法优缺点3.1 优点•分水岭算法是一种无监督学习方法,不需要依赖任何先验知识或训练数据。
•可以对图像中的任意区域进行分割,不受形状、大小和数量的限制。
图像处理中的标记分水岭分割算法
图像处理中的标记分水岭分割算法如果图像中的目标物体是连接在一起的,则分割起来会更困难,分水岭分割算法经常用于处理这类问题,通常会取得比较好的效果。
分水岭分割算法把图像看成一幅“地形图”,其中亮度比较强的区域像素值较大,而比较暗的区域像素值较小,通过寻找“汇水盆地”和“分水岭界限”,对图像进行分割。
直接应用分水岭分割算法的效果往往并不好,如果在图像中对前景对象和背景对象进行标注区别,再应用分水岭算法会取得较好的分割效果。
有很多图像处理工具箱函数可以用到,如fspecial、imfilter、watershed、lable2rgb、imopen、imclose、imreconstruct、imcomplement、imregionalmax、bwareaopen、graythresh、和imimposemin函数等。
下面进行一个例子,步骤如下。
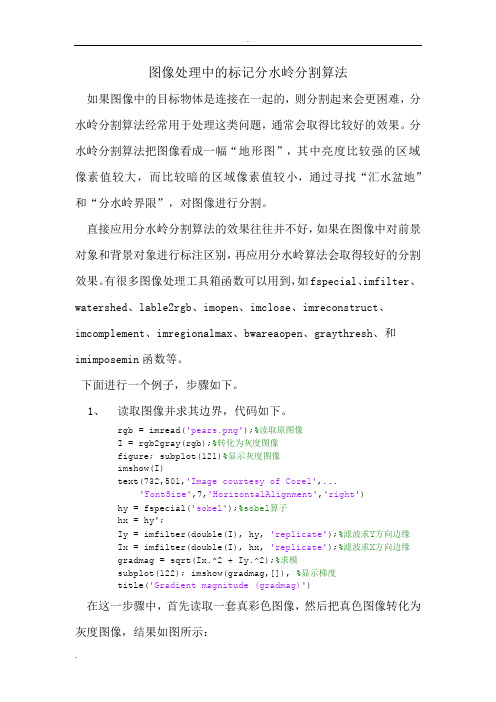
1、读取图像并求其边界,代码如下。
rgb = imread('pears.png');%读取原图像I = rgb2gray(rgb);%转化为灰度图像figure; subplot(121)%显示灰度图像imshow(I)text(732,501,'Image courtesy of Corel',...'FontSize',7,'HorizontalAlignment','right')hy = fspecial('sobel');%sobel算子hx = hy';Iy = imfilter(double(I), hy, 'replicate');%滤波求Y方向边缘Ix = imfilter(double(I), hx, 'replicate');%滤波求X方向边缘gradmag = sqrt(Ix.^2 + Iy.^2);%求模subplot(122); imshow(gradmag,[]), %显示梯度title('Gradient magnitude (gradmag)')在这一步骤中,首先读取一套真彩色图像,然后把真色图像转化为灰度图像,结果如图所示:图1原图和梯度图像使用sobel 边缘算子对图像进行水平和垂直方向的滤波,然后求取模值,sobel 算子滤波后的图像在边缘处会显示比较大的值,在没有边界处的值会很小,如上图右图所示。
数字图像处理中的分割算法

数字图像处理中的分割算法数字图像处理是一门涉及到许多领域的学科,如计算机视觉、图像识别等。
其中,图像分割算法是数字图像处理中的重要算法之一,其作用是根据图像的颜色、灰度、纹理或其他特征将图像划分成若干个区域,从而达到图像的细化、特征提取和目标定位等目的。
本文介绍几种常见的图像分割算法,包括全局阈值算法、分水岭算法和基于聚类的算法。
一、全局阈值算法全局阈值算法是一种最简单的图像分割算法,基于图像像素灰度直方图分析,通过选取合适的像素灰度阈值将图像分成背景和目标两部分。
这种算法适用于明显分割的图像,如黑白对比强烈的二值图像。
通常采用一些经典算法如大津算法、最大熵算法等选取阈值。
二、分水岭算法分水岭算法是一种基于图像形态学分析的分割算法。
图像的灰度值可以理解为地形高低不同,而图像中的某些区域可以看成是一些分水岭。
分水岭算法通过将图像看做一个三维地图,将图像的灰度值对应到地图的高度,通过对图像进行基于领域的腐蚀操作然后标定洼地,一些较高的区域就可以被视为分水岭,最后将图像分割成几个不同的块。
分水岭算法不仅可以对二值图像进行分割,而且也可以对彩色图像进行分割。
另外,分水岭算法可以通过加入先验知识等来改进分割效果。
三、基于聚类的算法基于聚类的算法是一种常用的图像分割算法。
这种算法根据图像像素之间的相似度将像素分为若干个类别,相似度可以通过像素在不同颜色或空间位置上的距离来定义。
聚类算法可以分为基于原型的聚类算法和基于密度的聚类算法。
基于原型的聚类算法包括K-Means算法、高斯混合模型等,基于密度的聚类算法包括DBSCAN算法、OPTICS算法等。
随着深度学习技术的发展,基于聚类的算法在CPU、GPU上的高效实现成为可能,卷积神经网络可以同时基于像素位置和像素值来约束图像分割效果,成为图像分割领域的热点算法。
总之,图像分割是数字图像处理中很重要的一步,影响着最终处理效果,应该根据不同的应用场景,选取合适的图像分割算法。
分水岭算法的概念及原理
分水岭算法的概念及原理
分水岭算法(Watershed Algorithm)是一种用于图像分割的算法,它基于山脊线(ridge line)和水流的概念,能够将图像中的物体分割出来。
该算法的主要原理是将图像看作地形地貌,将亮度视作高程,通过模拟洪水灌溉的过程,将图像分割成多个区域。
分水岭算法的核心思想是:将图像中的亮度极值点视作各个地块的山峰,从这些山峰出发,模拟水流的分布过程,即从高处向低处流动,在流动的过程中形成不同的流域。
当水流面临两个流域的交汇区时,就会形成分水岭,从而将图像分割成多个区域。
具体的分水岭算法步骤如下:
1.预处理:将彩色图像转换成灰度图像,并进行平滑处理,以减少噪声的干扰。
2.计算梯度图像:通过计算图像灰度值的梯度来得到梯度图像。
梯度较大的地方通常表示物体的边界。
3.标记种子点:选取梯度图像中的极值点作为种子点(山峰),这些点将成为分水岭的起点。
4.洪水灌溉:从种子点开始模拟水流的分布过程。
初始化一个标记图像,将种子点周围标记为相应的流域。
然后将水从种子点开始向相邻的像素流动,直到遇到另一个流域或已经被标记过。
这样不断地灌溉,最终得到一个水流分布图。
6.后处理:将不可靠的区域(通常是细长的、过于小的区域)进行合并,得到最终的分割结果。
总的来说,分水岭算法是一种基于洪水灌溉模拟的图像分割算法,通过模拟水流的分布过程,将图像分割成多个区域,从而准确地分割出物体边界。
一种基于标记的分水岭图像分割新算法_高丽
第12卷 第6期2007年6月中国图象图形学报Journa l o f I m age and G raphicsV o.l 12,N o .6June ,2007基金项目:中国科学院海外杰出学者基金项目(E 09JJ 02)收稿日期:2005-11-15;改回日期:2006-03-03第一作者简介:高丽(1978~ ),女。
现为中国科学院博士研究生。
主要研究方向为数字图像处理、视频序列物体分割与视频分割、多媒体芯片。
E -m ail :f u t u re _gao @hot m ai.l co m一种基于标记的分水岭图像分割新算法高 丽1),2) 杨树元1) 李海强3)1)(中国科学院研究生院,北京 100039) 2)(中国科学院声学研究所数字系统集成部,北京 100080)3)(Sonyerics son 中国研发中心,北京 100102)摘 要 为了降低分水岭算法的过分割问题,提出一种新改进的基于标记的分水岭图像分割方法。
该方法是在分水岭算法的基础上,算法直接应用分水岭在原始梯度图像而并非简化之后的图像进行分割,从而保证没有物体边缘信息的丢失。
与此同时,新算法设计一种新的标记提取方法,从梯度的低频成份中提取与物体相关的局部极小值。
它们将构成二值标记图像。
然后,将提取的标记利用形态学极小值标定技术强制作为原始梯度图像的局部极小值,而屏蔽梯度图像中原有的所有局部极小值。
最后,分水岭在经过修改之后的梯度图像上进行图像分割,最终获得较好的图像分割结果。
利用本文提出的图像分割算法可以获得较为理想的图像分割结果。
通过对不同类型的图像进行试验,证明本文提出的图像分割算法能够获得符合人类视觉特点,具有实际意义而且一致的分割区域,以及较为准确、连续、一个像素大小的物体边界。
与其他的分水岭改进方法相比,本文提出的方法要求的计算复杂度较低,具有简单的参数,同时能够更为有效地降低分水岭算法的过分割问题。
关键词 图像分割 彩色图像的梯度图 巴特沃思低通滤波 数学形态学 标记提取 分水岭中图法分类号:TN919.81 文献标识码:A 文章编号:1006-8961(2007)06-1025-08New Unsupervised I m age Seg m entation vi a M arker -BasedW atershedGAO Li1),2),YANG Shu -yuan 2),LiH ai -q iang3)1)(Gr aduate s choo lo f t he Ch i n es e Acad e m y of S cie nces ,Beiji ng 100039)2)(D epart men t ofD i g ita lSyste m In te gration Techn i que ,In stit u t e of Ac oustics ,CAS ,Beiji ng 100080)3)(S onyeri css on R &D Cen t er ,B eij ing 100102)Ab strac t T his paper suggests an i m proved m arker -based w ate rshed i m age -seg m entati on m ethod to reduce t he over -segm entati on of t he w atershed a l gorit h m.The ne w m e t hod app lies t he w ate rshed transf o r m d irec tl y on t he original grad i ents i m age i nstead of si m p lified i m age ,so t hat t he loss o f boundary i n f o r m ati on can be avo i ded .O n t he othe r hand ,w e desi gn a ne w m arker -ex tracted app roach t o ex tract t he regional m ini m a re lated to the ob j ec ts fro m the l ow frequency com ponents o f the g radien ts .These ex trac t ed m i n i m a constit u t e the binary m arker i mage .A nd t hen the ex trac t ed m a rke rs are i m po sed on the o ri g ina l grad i ents as its m i ni ma ,while all its i n trinsic m ini m a a re suppre ssed .F i na ll y ,t he wa tershed a l gorit h m isapp lied to t he m odified grad i ents by t he m a rke rs to reduce effec tive l y t he over -seg m enta tion .A cross a varie t y o f i m age types ,it is proven t ha t t h is new m e t hod can ob tain meaning f u l and ho m ogeneous reg i ons w ith accura t e ,consecutive andone -pi xe l w i de boundary .Compared w it h othe r m e t hods ,this sy stem requires f ew er compu tations and si m pler para m e t e rsand can m ore efficientl y reduce t he over -seg m entati on of t he w atershed a l go rit hm .K eyword s i mgae segm en t a tion ,co l o r i mage g radients ,Bu tter w orth filter ,m a t he m atica l mo rpho l ogy ,ma rker extrac tion ,w ate rshed1026 中国图象图形学报第12卷1 引 言图像分割是更高层次图像与视频分析的基础。
opencv的分水岭算法

opencv的分水岭算法
OpenCV是一个流行的计算机视觉库,它提供了许多图像处理和计算机视觉算法。
分水岭算法是OpenCV中的一种图像分割算法,用于将图像分割成多个不同的区域。
分水岭算法的主要思想是将图像看作是一个地形图,其中像素的灰度值表示地势高度。
然后通过向图像中注入水,水从低处逐渐流动到高处,最终形成分割区域。
这个过程中,水会在不同区域的边界上形成堤坝,这些堤坝就代表了物体的边界。
分水岭算法的步骤如下:
1. 对图像进行预处理,例如去噪、平滑等操作,以便更好地检测边界。
2. 对图像进行灰度转换,如果图像是彩色的,需要将其转换为灰度图像。
3. 根据图像的特征,选择合适的标记方法。
可以使用阈值分割、边缘检测等方法得到初始标记。
4. 通过计算梯度图像或距离变换来确定未标记像素的优先级,并按照优先级逐渐向图像注入水。
5. 不断更新图像中的水流,直到水流相遇或达到预设的终止条件。
6. 根据最终的水流情况,将图像分割成多个不同的区域。
分水岭算法在图像分割中具有广泛的应用,特别是在处理复杂的图像场景、图像中的目标重叠等情况下表现出色。
但它也有
一些局限性,例如对于图像中的噪声比较敏感,可能会导致过分细化的分割结果。
因此,在实际应用中需要根据具体的场景进行参数调节和优化。
基于标记的分水岭分割算法OpenCV中距离变换
基于标记的分⽔岭分割算法OpenCV中距离变换 图像分割作为图像识别的基础,在图像处理中占有重要地位,通常需要在进⾏图像分割算法前找到轮廓或分割线,因此传统的分割算法主要集中在边缘检测、阈值处理等。
分⽔岭算法 分⽔岭算法是⼀种图像区域分割法,在分割的过程中,它会把跟临近像素间的相似性作为重要的参考依据,从⽽将在空间位置上相近并且灰度值相近的像素点互相连接起来构成⼀个封闭的轮廓,封闭性是分⽔岭算法的⼀个重要特征。
其他图像分割⽅法,如阈值,边缘检测等都不会考虑像素在空间关系上的相似性和封闭性这⼀概念,彼此像素间互相独⽴,没有统⼀性。
分⽔岭算法较其他分割⽅法更具有思想性,更符合⼈眼对图像的印象。
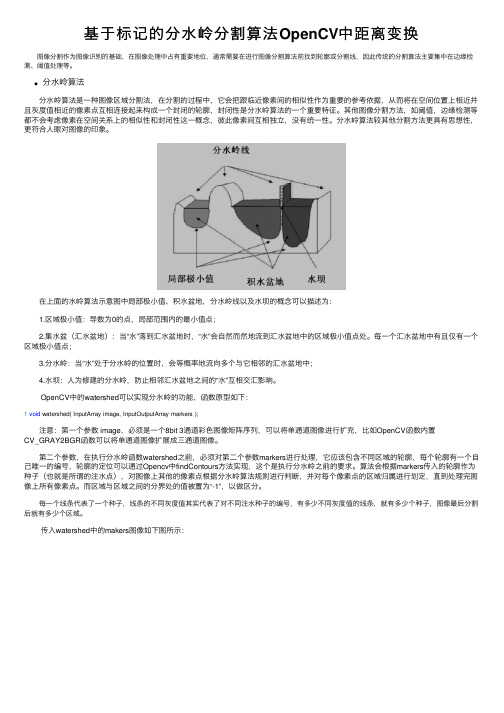
在上⾯的⽔岭算法⽰意图中局部极⼩值、积⽔盆地,分⽔岭线以及⽔坝的概念可以描述为: 1.区域极⼩值:导数为0的点,局部范围内的最⼩值点; 2.集⽔盆(汇⽔盆地):当“⽔”落到汇⽔盆地时,“⽔”会⾃然⽽然地流到汇⽔盆地中的区域极⼩值点处。
每⼀个汇⽔盆地中有且仅有⼀个区域极⼩值点; 3.分⽔岭:当“⽔”处于分⽔岭的位置时,会等概率地流向多个与它相邻的汇⽔盆地中; 4.⽔坝:⼈为修建的分⽔岭,防⽌相邻汇⽔盆地之间的“⽔”互相交汇影响。
OpenCV中的watershed可以实现分⽔岭的功能,函数原型如下:1void watershed( InputArray image, InputOutputArray markers ); 注意:第⼀个参数 image,必须是⼀个8bit 3通道彩⾊图像矩阵序列,可以将单通道图像进⾏扩充,⽐如OpenCV函数内置CV_GRAY2BGR函数可以将单通道图像扩展成三通道图像。
第⼆个参数,在执⾏分⽔岭函数watershed之前,必须对第⼆个参数markers进⾏处理,它应该包含不同区域的轮廓,每个轮廓有⼀个⾃⼰唯⼀的编号,轮廓的定位可以通过Opencv中findContours⽅法实现,这个是执⾏分⽔岭之前的要求。
分水岭算法
分水岭算法1. 简介分水岭算法是一种用于图像分割的算法。
通过将图像视为地形地貌,将图像中的每个像素视为一个水滴,从低处开始模拟水的渗透和汇聚过程,最终得到图像中的不同区域。
分水岭算法最初用于地理学中的水文地貌研究,后来被引入到计算机视觉领域中。
它在图像分割、目标检测、图像处理等方面具有广泛的应用。
2. 算法步骤分水岭算法包含以下几个步骤:2.1 图像预处理首先,对原始图像进行预处理,以便更好地进行分水岭算法的运算。
预处理的步骤可以包括灰度化、去噪、平滑滤波等。
2.2 计算图像的梯度梯度表示图像中每个像素的边缘强度。
通过计算图像的梯度,可以找到图像中的边缘和纹理信息。
常用的计算梯度的方法包括Sobel、Prewitt等算子。
2.3 寻找图像中的标记点标记点是分水岭算法中的关键概念,表示图像中的起始点或分水岭点。
标记点的选取对于最终分割结果有很大的影响。
通常情况下,可以通过阈值分割、连通区域分析等方法寻找图像中的标记点。
2.4 计算距离变换图距离变换图是一个将图像中每个像素替换为其与最近标记点之间距离的图像。
通过计算距离变换图,可以评估每个像素到最近标记点的距离。
2.5 计算分水岭线分水岭线是指图像中的边缘或过渡区域,它将不同的区域分隔开来。
通过计算距离变换图,可以找到图像中的分水岭线。
2.6 执行分水岭漫水算法最后,执行分水岭漫水算法,将图像中的每个像素与标记点进行比较,并根据像素值和距离变换图进行分割。
分水岭漫水算法会将图像中的不同区域分割成若干个连通区域。
3. 算法优缺点3.1 优点•分水岭算法可以对图像进行多种类型的分割,包括分割不完全的区域和不规则形状的目标。
•分水岭算法不需要预先知道目标的数量。
•分水岭算法可以自动识别图像中的背景和前景。
3.2 缺点•分水岭算法对于噪声和纹理较强的图像分割效果不理想。
•分水岭算法对于图像中的非连通区域分割效果差。
•分水岭算法具有较高的计算复杂度,对于大规模图像处理较为困难。
基于标记的多尺度分水岭视频目标分割算法

t n e d rt ee c si es g n ai n f h t rh da g r h o e g n e x e s e me t t s t ewae s e l o i m, O i h sah g d p b l y h v o o t S a ih a a t i t . t a i
( . ol e f l tc n ier g b C lg Meh ncl n ier g a C lg Ee r gn ei ; . ol e f ca i gnei , e o c iE n e o aE n
Ynh nU iesy Q n u nd o0 6 0 , bi rv c, hn a sa nvri , ih ag a 6 04 Hee Po i e C i t n a)
第 3 卷 第 4期 7
2 1 年 4月 00
光 电工 程
Op o Elc r n cEng n e i g t — e to i i e rn
V_ .7 NO 4 0 3 . . 1 Ap i 2 1 rl 0 0 ,
文章编 号 :1 0 — 0 X 2 1)4 0 3 — 5 0 3 5 1 (0 00 — 10 0
及快速运动的 目标 ,继承 了变化检测和分水岭 算法速度快的优点,克服 了分 水岭容 易产生过分割的缺点 ,具有较
分水岭算法综述
分水岭算法综述分水岭算法是图像分割领域中常用的一种算法,它可以将图像分割成不同的区域,每个区域内的像素具有相似的特征。
本文将对分水岭算法进行综述,介绍其原理、应用以及优缺点。
一、分水岭算法的原理分水岭算法的原理源于水在山谷中流动的过程。
首先,将图像看作一个地形图,较亮的区域对应山峰,较暗的区域对应山谷。
然后,通过在地形图上进行洪水填充,使得水从山峰的高处流向山谷的低处,最终形成水汇聚的区域。
这些水汇聚的区域即为图像的分割结果。
分水岭算法的核心是确定图像中的山峰和山谷。
为了实现这一点,需要进行图像的预处理。
首先,对图像进行灰度化处理,将彩色图像转换为灰度图像。
然后,通过应用梯度算子,计算图像中每个像素的梯度值。
梯度值较大的像素被认为是山峰,梯度值较小的像素被认为是山谷。
在预处理完成后,可以开始进行分水岭算法的主要步骤。
首先,将山峰像素标记为前景,山谷像素标记为背景。
然后,将标记的像素区域称为markers。
接下来,通过对markers进行洪水填充,将水从山峰处逐渐流向山谷。
当水汇聚到一定程度时,会形成分割的边界,即分水岭。
二、分水岭算法的应用分水岭算法在图像分割领域有广泛的应用。
以下是一些常见的应用场景:1. 医学图像分割:分水岭算法可以用于医学图像的分割,如MRI图像中的肿瘤分割、X射线图像中的骨骼分割等。
通过将图像分割成不同的区域,医生可以更好地观察和分析病变部位。
2. 地质勘探:分水岭算法可以用于地质勘探中的岩石分割。
通过将地质图像分割成不同的区域,可以更好地识别和分析不同类型的岩石,有助于矿产资源的开发和利用。
3. 视觉检测:分水岭算法可以用于视觉检测中的目标分割。
通过将图像中的目标分割出来,可以更好地进行目标识别和跟踪,有助于自动驾驶、智能监控等领域的发展。
三、分水岭算法的优缺点分水岭算法具有以下优点:1. 算法简单:分水岭算法的原理简单易懂,实现相对容易。
2. 适用性广泛:分水岭算法可以用于不同类型的图像,包括医学图像、地质图像、自然图像等。
分水岭算法详细介绍与应用
分水岭算法详细介绍与应用
分水岭算法(Watershed Algorithm),是一种用于图像分割的算法,主要用于识别图像中不同区域的分界,将不同的图像部件分割开实现分割任务,
可以用于图像分割,对象检测,语义分割,目标检测等应用领域。
它有两个关键步骤:Marker- Controlled Watershed Algorithm 和Region-Growing Watershed Algorithm。
Marker- Controlled Watershed Algorithm 使用标记控制水岭算法来实现图像分割,该算法将图像分割成不同的区域,通过将固定的标记放置在感兴趣的区域的边界上来区分这些区域。
它将这个有限的标记视为特殊的水源,并通过将聚类和标记之间的距离(山谷深度)作为一种特殊的权重来进行分割。
Region-Growing Watershed Algorithm 则是一种基于区域的算法,它将图像划分为不同的区域,然后逐渐地将这些区域划分更进一步,最后形成图像分割的结果。
应用场景:
1. 医学图像分割:分水岭算法可用于分割脑部及胸部CT图像,识别出特定部位,可用于肿瘤信息检测等;
2. 目标检测:分水岭算法可用于目标行为分析中,识别出舞蹈等动作;
3. 车牌识别:分水岭算法可与边缘检测相结合,实现车牌的识别;
4. 美容整形:使用分水岭算法用于晶体管(LightSheet)成像中,可以更精确的识别出需要整形的面部特征,比如眼睛、口红、嘴唇等;
5. 地图编辑:使用分水岭算法可以帮助专业人员编辑某个地点的街道图,例如,可以将街道、公园、河流等分割出来;
6. 后期处理:可以用分水岭算法来帮助专业人员识别难以被分辨的图像,如细胞等。
基于标记的分水岭算法原理
基于标记的分水岭算法原理
1、分水岭分割法是一种基于拓扑理论的数学形态学分割方法。
它的基本思想是把一幅图像看成一个测地线拓扑地形。
图像中每个像素的灰度值代表该点的海拔高度,每个局部最小值及其影响区域称为集水盆,集水盆的边界形成分水岭。
分水岭的概念和形成可以通过模拟浸泡过程来解释。
在每个局部最小值的表面扎一个小洞,然后将整个模型慢慢浸入水中。
随着浸没的加深,每个局部极小值的影响区域逐渐向外扩展,在两个集水池的汇合处筑起一道堤坝,形成一个分水岭。
2、分水岭的计算过程是一个迭代标注的过程。
经典的流域计算方法是由L. Vincent提出的。
在该算法中,分水岭计算分为两个步骤,一个是排序过程,另一个是洪泛过程。
首先,将每个像素的灰度从低到高排序。
然后,在由低到高的泛洪过程中,利用先进先出(FIFO)结构,在H阶高度判断并标记每个局部最小值的影响区域。
3、分水岭变换是输入图像的分水岭图像,分水岭之间的边界点是分水岭。
显然,分水岭表示输入图像的最大点。
因此,为了获得图像的边缘信息,通常使用梯度图像作为输入图像。
分水岭算法原理
分水岭算法原理
分水岭算法是一种图像分割的算法,旨在将图像分割成多个不重叠的区域。
其原理主要包括以下几个步骤:
1. 将图像转换为灰度图像,并应用滤波操作以去除噪音。
2. 对图像进行二值化处理,将图像分为前景区域和背景区域。
3. 计算图像的梯度,并根据梯度大小确定种子点。
4. 初始化标记图像和队列,将种子点添加到队列中。
5. 迭代地从队列中取出像素点,根据像素点的邻域关系进行扩展。
6. 根据像素点的邻域像素值和标记图像的标签进行更新。
7. 将更新后的像素点添加到队列中。
8. 不断重复步骤5-7,直到队列为空。
9. 根据标记图像中的标签生成最终的分割结果。
分水岭算法的核心思想是将图像视为一个地形图,其像素值可以被看作是地形高度。
通过计算图像的梯度,可以确定图像中的梯度谷点,即分水岭线的位置。
接着通过对梯度谷点进行扩展和更新,可以将图像分割成多个区域,每个区域代表一个分割结果。
需要注意的是,分水岭算法对图像的初始分割结果非常敏感,且对噪声较为敏感。
因此,在实际应用中,通常需要对图像进行预处理和后处理,以提高算法的效果。
分水岭算法

图像处理——分水岭算法分水岭算法是一种图像区域分割法,在分割的过程中,它会把跟临近像素间的相似性作为重要的参考依据,从而将在空间位置上相近并且灰度值相近(求梯度)的像素点互相连接起来构成一个封闭的轮廓。
分水岭算法常用的操作步骤:彩色图像灰度化,然后再求梯度图,最后在梯度图的基础上进行分水岭算法,求得分段图像的边缘线。
下面左边的灰度图,可以描述为右边的地形图,地形的高度是由灰度图的灰度值决定,灰度为0对应地形图的地面,灰度值最大的像素对应地形图的最高点。
我们可以自己编程实现灰度图的地形图显示,工程FirstOpenCV6就实现了简单的这个功能,比如上边的灰度图,显示为:对灰度图的地形学解释,我们我们考虑三类点:1. 局部最小值点,该点对应一个盆地的最低点,当我们在盆地里滴一滴水的时候,由于重力作用,水最终会汇聚到该点。
注意:可能存在一个最小值面,该平面内的都是最小值点。
2. 盆地的其它位置点,该位置滴的水滴会汇聚到局部最小点。
3. 盆地的边缘点,是该盆地和其它盆地交接点,在该点滴一滴水,会等概率的流向任何一个盆地。
假设我们在盆地的最小值点,打一个洞,然后往盆地里面注水,并阻止两个盆地的水汇集,我们会在两个盆地的水汇集的时刻,在交接的边缘线上(也即分水岭线),建一个坝,来阻止两个盆地的水汇集成一片水域。
这样图像就被分成2个像素集,一个是注水盆地像素集,一个是分水岭线像素集。
下面的gif图很好的演示了分水岭算法的效果:在真实图像中,由于噪声点或者其它干扰因素的存在,使用分水岭算法常常存在过度分割的现象,这是因为很多很小的局部极值点的存在,比如下面的图像,这样的分割效果是毫无用处的。
为了解决过度分割的问题,可以使用基于标记(mark)图像的分水岭算法,就是通过先验知识,来指导分水岭算法,以便获得更好的图像分段效果。
通常的mark图像,都是在某个区域定义了一些灰度层级,在这个区域的洪水淹没过程中,水平面都是从定义的高度开始的,这样可以避免一些很小的噪声极值区域的分割。
分水岭算法程序实现过程详解
注 意 : 第 一 轮,把标 记点的 邻居点 放入相 应的优 先级队 列后,先 进先出 的原则 处理队 列中的 像素结 点,找 到一个 非零结 点后,执 行第1,2,3步 ,执 行完第 3步之 后,重新 更新队 列再次 进行扫 描.
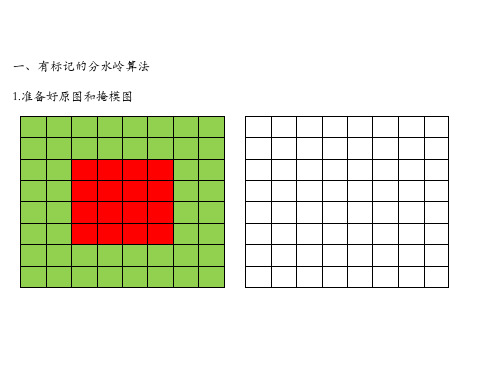
一、有标记的分水岭算法 1.准备好原图和掩模图
2.对掩模图做初始化标记,以形成最初的注水区域,设置mask边框值为-1,即每个标记 种子,全为正值,1,2,3...都是一个初始聚水盆,标记的周围一圈的邻居像素就是聚 像素四邻域内有标记点,并将邻居像素对应原图 中的点放入相应的优先级队列
优先级队列
Y
0 1 2 3 4 5 6
...
254 255
X
4.递归注水过程,通过扫描0-255高度值队列,从队列0开始,如果找到一个像素结点,则弹出 该结点,并退出扫描.
①如果该点在mask中的四邻域,只存在一个非0值,则将该点标记为该非0值. ②如果存在两 个不同的非0值,表示该点为两个注水盆地的边缘,即分水岭线,在mark图像中标记该点为-1. ③扫描该点的邻居点,是否存在为0的mark域,存在的话这把该邻域点按照rgb高度值,放入
二、传统分水岭算法
传统的分水岭分割方法,其基本思想是把图像看作是测地学上的拓扑地貌,图 像中每一像素的灰度值表示该点的海拔高度,每一个局部极小值及其影响区 域称为集水盆地,而集水盆地的边界则形成分水岭.基于梯度图像的直接分水 岭算法容易导致图像的过分割,产生这一现象的原因主要是由于输入的图像 存在噪声等而产生许多小的集水盆地,从而导致分割后的图像不能将图像中 有意义的区域表示出来.所以必须对分割结果的相似区域进行合并.
下标L表示左,R表示右,T表示上,B表示下,abs表示取绝对值
形态学分水岭算法
形态学分水岭算法
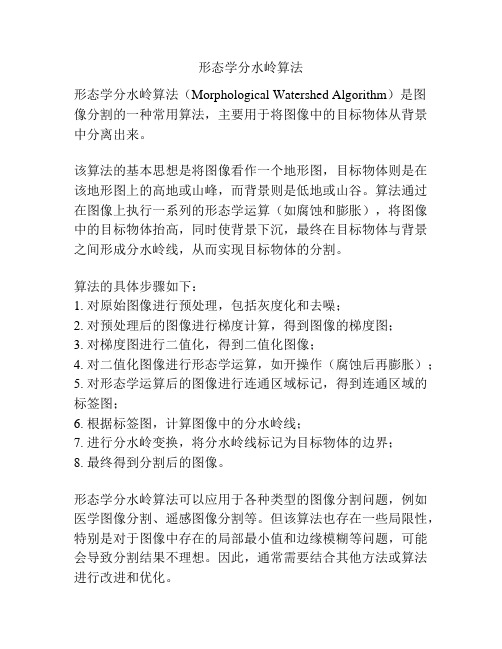
形态学分水岭算法(Morphological Watershed Algorithm)是图像分割的一种常用算法,主要用于将图像中的目标物体从背景中分离出来。
该算法的基本思想是将图像看作一个地形图,目标物体则是在该地形图上的高地或山峰,而背景则是低地或山谷。
算法通过在图像上执行一系列的形态学运算(如腐蚀和膨胀),将图像中的目标物体抬高,同时使背景下沉,最终在目标物体与背景之间形成分水岭线,从而实现目标物体的分割。
算法的具体步骤如下:
1. 对原始图像进行预处理,包括灰度化和去噪;
2. 对预处理后的图像进行梯度计算,得到图像的梯度图;
3. 对梯度图进行二值化,得到二值化图像;
4. 对二值化图像进行形态学运算,如开操作(腐蚀后再膨胀);
5. 对形态学运算后的图像进行连通区域标记,得到连通区域的标签图;
6. 根据标签图,计算图像中的分水岭线;
7. 进行分水岭变换,将分水岭线标记为目标物体的边界;
8. 最终得到分割后的图像。
形态学分水岭算法可以应用于各种类型的图像分割问题,例如医学图像分割、遥感图像分割等。
但该算法也存在一些局限性,特别是对于图像中存在的局部最小值和边缘模糊等问题,可能会导致分割结果不理想。
因此,通常需要结合其他方法或算法进行改进和优化。
分水岭分割公式
分水岭分割公式分水岭分割公式是一种图像处理算法,用于在图像中找到一条分割线,将图像分割成两个部分。
这条分割线被称为分水岭,因为它类似于山脉中的山脊,可以将两个不同的水流分开。
分水岭分割公式使用了数学和图像处理的方法,通过计算图像中每个像素的梯度值和距离变换来确定分水岭的位置。
分水岭的位置被定义为图像中梯度值最高的像素点,这个点将图像分割成两个部分。
在分水岭分割公式中,首先需要计算图像的梯度值。
梯度值表示了图像中像素的变化情况,可以用来找到图像中的边缘和纹理。
计算梯度值的方法有很多种,常用的方法包括Sobel算子和Canny算子。
这些算子可以对图像进行卷积操作,得到图像的梯度值。
接下来,需要进行距离变换。
距离变换是一种图像处理方法,用于计算图像中每个像素点到指定对象的距离。
在分水岭分割公式中,指定对象可以是图像中的某个像素点或者某个区域。
距离变换可以帮助确定分水岭的位置,使得分割结果更加准确。
在计算了梯度值和距离变换之后,就可以确定分水岭的位置了。
分水岭的位置被定义为图像中梯度值最高的像素点,可以通过阈值处理的方法来确定。
阈值处理是一种将图像像素进行二值化的方法,可以将图像中低于一定阈值的像素置为0,高于阈值的像素置为1。
通过阈值处理,可以将图像中的梯度值最高的像素点标记为分水岭。
根据分水岭的位置,可以将图像分割成两个部分。
分水岭的位置将图像分成了两个区域,分别属于不同的物体或者背景。
分割结果可以通过颜色来表示,通常使用不同的颜色来标记不同的区域。
分割结果可以用于图像分析、目标检测和图像识别等应用。
总结一下,分水岭分割公式是一种图像处理算法,通过计算图像的梯度值和距离变换来确定分水岭的位置,从而将图像分割成两个部分。
这种算法可以用于图像分析、目标检测和图像识别等应用领域。
分水岭分割公式的原理和方法相对复杂,但在实际应用中具有较好的效果。
分水岭分割法
分水岭分割法分水岭分割法(Watershed Segmentation)是一种基于图像亮度和颜色信息的图像分割算法。
它的原理是将图像看作是一个地形图,图像中的亮度和颜色信息对应地形中的高度,通过寻找分水岭(即图像中的局部最小值点)来将图像分割成不同的区域。
分水岭分割法在许多计算机视觉任务中都有广泛应用,如图像分析、目标检测和图像识别等。
分水岭分割法的基本步骤如下:1. 预处理:对图像进行预处理,如去噪、平滑、增强等,以提高分割的效果。
2. 计算梯度图像:通过计算图像的梯度信息,可以得到图像中的边缘信息,用于寻找分水岭。
3. 寻找种子点:根据梯度图像的局部最小值点来确定种子点,种子点对应于图像中的分水岭。
4. 标记和融合:根据种子点,将图像中的像素点标记为不同的区域,并进行融合,得到最终的分割结果。
分水岭分割法的优点是能够对图像进行全局的分割,不受图像中目标形状和大小的限制。
然而,分水岭分割法也存在一些问题,例如对噪声比较敏感,容易产生过分割或欠分割的情况。
因此,在实际应用中,需要根据具体的任务和图像特点选择合适的参数和方法来改进分割效果。
分水岭分割法的应用非常广泛。
在医学图像处理中,可以用于分割病变区域、提取器官结构等。
在遥感图像处理中,可以用于分割地物、提取道路网络等。
在计算机视觉中,可以用于目标检测、图像识别、图像分析等。
此外,分水岭分割法还可以与其他图像处理方法相结合,如边缘检测、阈值分割等,以提高分割效果。
总结起来,分水岭分割法是一种基于图像亮度和颜色信息的图像分割算法,通过寻找分水岭将图像分割成不同的区域。
它在许多计算机视觉任务中都有广泛应用,具有全局分割的优点。
然而,分水岭分割法也存在一些问题,需要根据具体的任务和图像特点来选择合适的方法和参数。
分水岭分割法的应用非常广泛,可以用于医学图像处理、遥感图像处理和计算机视觉等领域。
通过合理地使用分水岭分割法,可以提高图像分割的效果,为后续的图像分析和处理任务提供有力支持。
图像分割之分水岭算法
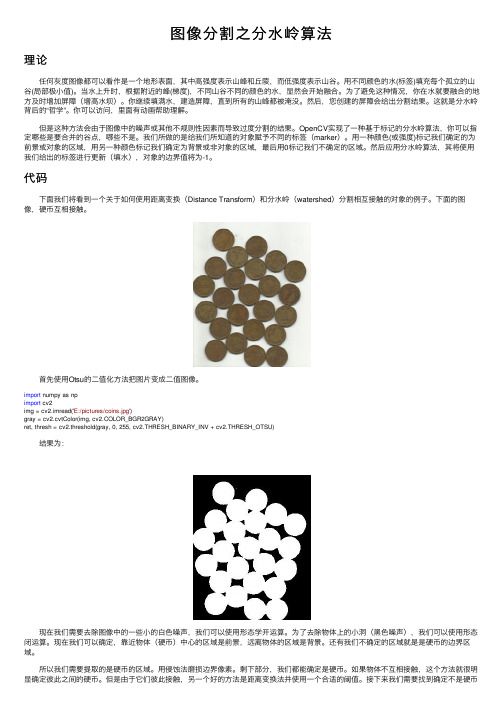
图像分割之分⽔岭算法理论 任何灰度图像都可以看作是⼀个地形表⾯,其中⾼强度表⽰⼭峰和丘陵,⽽低强度表⽰⼭⾕。
⽤不同颜⾊的⽔(标签)填充每个孤⽴的⼭⾕(局部极⼩值)。
当⽔上升时,根据附近的峰(梯度),不同⼭⾕不同的颜⾊的⽔,显然会开始融合。
为了避免这种情况,你在⽔就要融合的地⽅及时增加屏障(增⾼⽔坝)。
你继续填满⽔,建造屏障,直到所有的⼭峰都被淹没。
然后,您创建的屏障会给出分割结果。
这就是分⽔岭背后的“哲学”。
你可以访问,⾥⾯有动画帮助理解。
但是这种⽅法会由于图像中的噪声或其他不规则性因素⽽导致过度分割的结果。
OpenCV实现了⼀种基于标记的分⽔岭算法,你可以指定哪些是要合并的⾕点,哪些不是。
我们所做的是给我们所知道的对象赋予不同的标签(marker)。
⽤⼀种颜⾊(或强度)标记我们确定的为前景或对象的区域,⽤另⼀种颜⾊标记我们确定为背景或⾮对象的区域,最后⽤0标记我们不确定的区域。
然后应⽤分⽔岭算法,其将使⽤我们给出的标签进⾏更新(填⽔),对象的边界值将为-1。
代码 下⾯我们将看到⼀个关于如何使⽤距离变换(Distance Transform)和分⽔岭(watershed)分割相互接触的对象的例⼦。
下⾯的图像,硬币互相接触。
⾸先使⽤Otsu的⼆值化⽅法把图⽚变成⼆值图像。
import numpy as npimport cv2img = cv2.imread('E:/pictures/coins.jpg')gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)ret, thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU) 结果为: 现在我们需要去除图像中的⼀些⼩的⽩⾊噪声,我们可以使⽤形态学开运算。
为了去除物体上的⼩洞(⿊⾊噪声),我们可以使⽤形态闭运算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图像处理中的标记分水岭分割算法如果图像中的目标物体是连接在一起的,则分割起来会更困难,分水岭分割算法经常用于处理这类问题,通常会取得比较好的效果。
分水岭分割算法把图像看成一幅“地形图”,其中亮度比较强的区域像素值较大,而比较暗的区域像素值较小,通过寻找“汇水盆地”和“分水岭界限”,对图像进行分割。
直接应用分水岭分割算法的效果往往并不好,如果在图像中对前景对象和背景对象进行标注区别,再应用分水岭算法会取得较好的分割效果。
有很多图像处理工具箱函数可以用到,如fspecial、imfilter、watershed、lable2rgb、imopen、imclose、imreconstruct、imcomplement、imregionalmax、bwareaopen、graythresh、和imimposemin函数等。
下面进行一个例子,步骤如下。
1、读取图像并求其边界,代码如下。
rgb = imread('');%读取原图像I = rgb2gray(rgb);%转化为灰度图像figure; subplot(121)%显示灰度图像imshow(I)text(732,501,'Image courtesy of Corel',...'FontSize',7,'HorizontalAlignment','right')hy = fspecial('sobel');%sobel算子hx = hy';Iy = imfilter(double(I), hy, 'replicate');%滤波求Y方向边缘Ix = imfilter(double(I), hx, 'replicate');%滤波求X方向边缘gradmag = sqrt(Ix.^2 + Iy.^2);%求模subplot(122); imshow(gradmag,[]), %显示梯度title('Gradient magnitude (gradmag)')在这一步骤中,首先读取一套真彩色图像,然后把真色图像转化为灰度图像,结果如图所示:Gradient magnitude (gradmag)Image courtesy of Corel图1原图和梯度图像使用sobel边缘算子对图像进行水平和垂直方向的滤波,然后求取模值,sobel算子滤波后的图像在边缘处会显示比较大的值,在没有边界处的值会很小,如上图右图所示。
2、直接使用梯度模值进行分水岭算法,代码如下。
L = watershed(gradmag);%直接应用分水岭算法Lrgb = label2rgb(L);%转化为彩色图像figure; imshow(Lrgb), %显示分割后的图像title('Watershed transform of gradient magnitude (Lrgb)')直接使用梯度模值图像进行分水岭算法得到的结果往往会存在过度分割的现象,如下图所示。
因此通常需要对前景对象和背景对象进行标记,以获得更好的分割效果。
Watershed transform of gradient magnitude (Lrgb)图2直接对梯度图像进行分水岭分割3、分别对前景和背景进行标记,代码如下。
se = strel('disk', 20);%圆形结构元素Io = imopen(I, se);%形态学开操作figure; subplot(121)imshow(Io), %显示执行开操作后的图像title('Opening (Io)')Ie = imerode(I, se);%对图像进行腐蚀Iobr = imreconstruct(Ie, I);%形态学重建subplot(122); imshow(Iobr), %显示重建后的图像title('Opening-by-reconstruction (Iobr)')Ioc = imclose(Io, se);%形态学关操作figure; subplot(121)imshow(Ioc), %显示关操作后的图像title('Opening-closing (Ioc)')Iobrd = imdilate(Iobr, se);%对图像进行膨胀Iobrcbr = imreconstruct(imcomplement(Iobrd), ...imcomplement(Iobr));%形态学重建Iobrcbr = imcomplement(Iobrcbr);%图像求反subplot(122); imshow(Iobrcbr), %显示重建求反后的图像title('Opening-closing by reconstruction (Iobrcbr)')fgm = imregionalmax(Iobrcbr);%局部极大值figure; imshow(fgm), %显示重建后局部极大值图像title('Regional maxima of opening-closing by reconstruction (fgm)') I2 = I;I2(fgm) = 255;%局部极大值处像素设置为255figure; imshow(I2), %在原图上显示极大值区域title('Regional maxima superimposed on original image (I2)')se2 = strel(ones(5,5));%结构元素fgm2 = imclose(fgm, se2);%关操作fgm3 = imerode(fgm2, se2);%腐蚀fgm4 = bwareaopen(fgm3, 20);%开操作I3 = I;I3(fgm4) = 255;%前景处设置为255figure; subplot(121)imshow(I3)%显示修改后的极大值区域title('Modified regional maxima')bw = im2bw(Iobrcbr, graythresh(Iobrcbr));%转化为二值图像subplot(122); imshow(bw), %显示二值图像title('Thresholded opening-closing by reconstruction')可以使用很多算法来对前景对象进行标记,标记的每个对象内部的像素值是连接在一起的。
在这个例子中,使用形态学重建技术对前景对象进行标记,首先使用imopen函数对图像进行开操作,如图3左图所示,使用半径为20的圆形结构元素,开操作是膨胀和腐蚀操作的结合。
另外一种方法是先对图像进行腐蚀,然后对图像进行形态学重建,处理后的图像如图3右图所示。
Opening (Io)Opening-by-reconstruction (Iobr)图3开操作和重建操作结果对比在开操作之后进行关键操作可以去除一些很小的目标,如苹果上的茎干和一些污点等,如图4中左图所示。
另外一种方法是先对图像进行腐蚀,然后对图像进行形态学重建,重建后的图像如图4右图所示,注意在重建之前需要先对图像求反,然后再重建之后再进行一次求反。
Opening-closing (Ioc)Opening-closing by reconstruction (Iobrcbr)图4关操作和重建操作结果对比对比两幅图像Iobrcbr和Ioc,以重建为基础的开关操作(结果为Iobrcbr)比一般的开关操作(结果为Ioc)比一般的开关操作(结果为Ioc)在去除小的污点时会更有效,并且不会影响这个图像的轮廓。
计算Iobrcbr的局部极大值会得到比较好的前景标记,如图5所示。
Regional maxima of opening-closing by reconstruction (fgm)图5求取局部极大值的图像为了更好的理解这个结果,可以在原图像的基础上,显示局部极大值,对前景图像进行标记,如图6所示。
Regional maxima superimposed on original image (I2)图6在原图上显示局部极大值注意到图像中还有少部分目标物体,即苹果,未被正确的标记出,如果这些目标物体不能被正确的进行标记,则不能正确的进行分割。
并且,少部分前景目标物体已经拓展到边缘,因此应该收缩一下边缘,可以先对图像进行操作,然后进行腐蚀来达到这样的效果。
这个过程会产生一些孤立的像素点,可以使用bwareaopen函数来达到这样的效果,这个过程将像素点数量较少的孤立像素点去除,如图7左图所示。
Modified regional maxima Thresholded opening-closing by reconstruction图7调整后的局部极大值图像和二值图像将图像Iobrcbr使用合适的阈值转化成二值图像,其中淡颜色的值为背景,转化成二值图像如图7右图所示。
4、进行分水岭变换并显示,代码如下。
D = bwdist(bw);%计算距离DL = watershed(D);%分水岭变换bgm = DL == 0;%求取分割边界figure; imshow(bgm), %显示分割后的边界title('Watershed ridge lines (bgm)')gradmag2 = imimposemin(gradmag, bgm | fgm4);%设置最小值L = watershed(gradmag2);%分水岭变换I4 = I;I4(imdilate(L == 0, ones(3, 3)) | bgm | fgm4) = 255;%前景及边界处设置为255figure; subplot(121)imshow(I4)%突出前景及边界title('Markers and object boundaries')Lrgb = label2rgb(L, 'jet', 'w', 'shuffle');%转化为伪色彩图像subplot(122); imshow(Lrgb)%显示伪色彩图像title('Colored watershed label matrix')figure; imshow(I),hold onhimage = imshow(Lrgb);%在原图上显示伪色彩图像set(himage, 'AlphaData', ;title('Lrgb superimposed transparently on original image')从图7中可以看出,背景像素是黑色的,但在理想情况下,我们不希望背景标记太靠近目标对象的边缘,可以通过“骨骼化”进行细化,对二值图像的距离进行分水岭变换,然后寻找分水岭的界限,分水岭的界限如图8所示。