无线驱鸟炮系统设计与实现
无线遥控钛镭驱鸟炮的研究与开发
无线遥控钛镭驱鸟炮的研究与开发作者:王雨田跃孙明明邹新敏来源:《电子技术与软件工程》2013年第22期摘要针对中高空驱鸟的世界性难题,采用嵌入式技术、无线通讯技术、电控云台开发了一种新的遥控驱鸟装置,可有效满足机场的中高空驱鸟需求。
介绍该系统的系统结构及工作原理,讨论电机驱动,炮弹发射的安全监测,无线通讯等关键技术。
经过实地检验,证明该装置对机场高空驱鸟的适用性。
【关键词】中高空驱鸟机场驱鸟设备无线遥控1 前言在飞机起飞降落及飞行过程中,由于高速运动的飞机具有巨大的冲击力,如果与飞行者的鸟类发生相撞,可能对飞机造成致命的伤害,业内称为“鸟撞事故”,是一种多发性、危险性事件,有可能造成重大经济损失及人员伤亡,影响民航或部队的正常飞行或训练备战任务。
目前,全世界每年约发生1万例此类事故,国际航空联合会已把鸟害升级为“A”类航空灾难。
由于机场周边环境以草地为主,食物丰富吸引大量鸟类聚集,造成容易在机场附近发生鸟撞。
所以,在机场范围内安装驱鸟设备是防止鸟撞事故的有效途径。
机场驱鸟设备可分为两大类,一类以长期性的驱逐鸟类为目的减少机场及其周围鸟类生存数量,目前以激光驱鸟器为主要代表;另一类则是在飞机起飞着陆等易发事故阶段进行实时驱鸟,以直接减少鸟撞事故的发生为目的,目前以靠声音驱鸟的驱鸟设备为主。
传统的实时驱鸟设备主要通过定向声波、超声波、电子爆破音、煤气炮等方法驱鸟,以上手段比较容易被鸟类适应,同时有固定安装有驱鸟范围限制以及高空驱鸟效果随高度上升而衰减等缺点。
所以研发一种可以有效满足机场高空驱鸟要求,同时能对抗鸟类适应性的驱鸟设备对机场安全非常必要。
2 关于钛镭遥控驱鸟炮钛镭弹是一种适于飞机场驱鸟的专用驱鸟弹,电控击发、腾空炸响、具有声、光[3]、振动、气浪冲击。
具有良好的驱鸟效果。
通过发射钛雷弹的方式驱鸟,由于快速可控追踪鸟群腾空爆炸,释放点距鸟群很近,使得鸟群对钛雷弹爆炸发出的声音、闪光和物理冲击影响效果较佳,鸟群受惊后可以在相对较长时间远离空中爆炸位置,在跑道上空达到较好的驱鸟效果。
用于输电线路的驱鸟系统的制作技术
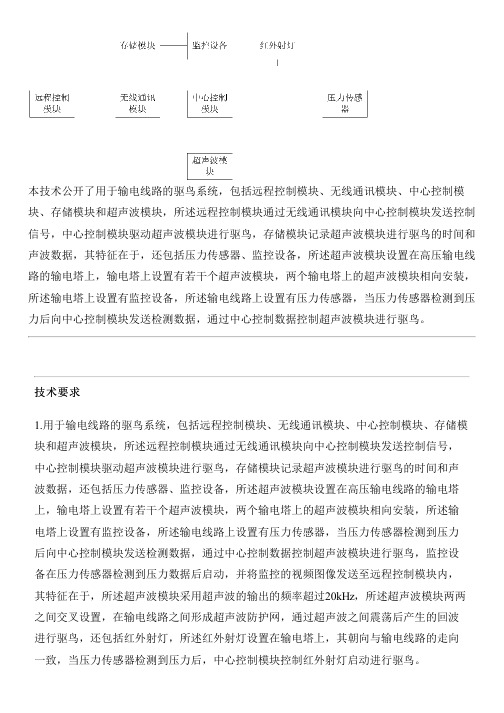
本技术公开了用于输电线路的驱鸟系统,包括远程控制模块、无线通讯模块、中心控制模块、存储模块和超声波模块,所述远程控制模块通过无线通讯模块向中心控制模块发送控制信号,中心控制模块驱动超声波模块进行驱鸟,存储模块记录超声波模块进行驱鸟的时间和声波数据,其特征在于,还包括压力传感器、监控设备,所述超声波模块设置在高压输电线路的输电塔上,输电塔上设置有若干个超声波模块,两个输电塔上的超声波模块相向安装,所述输电塔上设置有监控设备,所述输电线路上设置有压力传感器,当压力传感器检测到压力后向中心控制模块发送检测数据,通过中心控制数据控制超声波模块进行驱鸟。
技术要求1.用于输电线路的驱鸟系统,包括远程控制模块、无线通讯模块、中心控制模块、存储模块和超声波模块,所述远程控制模块通过无线通讯模块向中心控制模块发送控制信号,中心控制模块驱动超声波模块进行驱鸟,存储模块记录超声波模块进行驱鸟的时间和声波数据,还包括压力传感器、监控设备,所述超声波模块设置在高压输电线路的输电塔上,输电塔上设置有若干个超声波模块,两个输电塔上的超声波模块相向安装,所述输电塔上设置有监控设备,所述输电线路上设置有压力传感器,当压力传感器检测到压力后向中心控制模块发送检测数据,通过中心控制数据控制超声波模块进行驱鸟,监控设备在压力传感器检测到压力数据后启动,并将监控的视频图像发送至远程控制模块内,其特征在于,所述超声波模块采用超声波的输出的频率超过20kHz,所述超声波模块两两之间交叉设置,在输电线路之间形成超声波防护网,通过超声波之间震荡后产生的回波进行驱鸟,还包括红外射灯,所述红外射灯设置在输电塔上,其朝向与输电线路的走向一致,当压力传感器检测到压力后,中心控制模块控制红外射灯启动进行驱鸟。
2.根据权利要求1所述的用于输电线路的驱鸟系统,其特征在于,所述远程控制模块为PC 机、平板电脑、车载电脑、手机中任意一种。
3.根据权利要求1所述的用于输电线路的驱鸟系统,其特征在于,所述无线通讯模块通过GPRS/GSM进行网络传输。
机场智能驱鸟系统中的路由节点设计与实现
第37卷第10期 计算机应用与软件Vol 37No.102020年10月 ComputerApplicationsandSoftwareOct.2020机场智能驱鸟系统中的路由节点设计与实现陈裕通1 刘志刚1 陈裕芹1 刘玉芬21(广州民航职业技术学院 广东广州510403)2(华南理工大学广州学院 广东广州510800)收稿日期:2019-06-10。
广东省重点科研项目(2018GKTSCX025);广东省普通高校青年创新人才类项目(2018GkQNCX080)。
陈裕通,讲师,主研领域:无线通信技术。
刘志刚,副教授。
陈裕芹,副教授。
刘玉芬,高工。
摘 要 由于鸟类飞行路线的不确定性导致鸟击事件的时常发生,航空安全受到严重威胁,因此必须采取有效措施防止此类事件的发生。
结合现有驱鸟设备与机场地理环境的特性,提出基于物联网技术构建机场智能驱鸟系统的方案。
利用若干星型拓扑构建网状拓扑的设计解决ZigBee网络传输距离的问题,尤其对网络拓扑中起关键性作用的路由节点进行软硬件的设计,实现在机场区域内布设ZigBee网络的目的。
实验验证了所设计的路由节点的有效性,提高了原有机场驱鸟设备的驱鸟效果。
关键词 鸟击 驱鸟设备 物联网 路由节点中图分类号 TP319 文献标志码 A DOI:10.3969/j.issn.1000 386x.2020.10.018DESIGNANDIMPLEMENTATIONOFROUTINGNODEINAIRPORTINTELLIGENTBIRD REPELLINGSYSTEMChenYutong1 LiuZhigang1 ChenYuqin1 LiuYufen21(GuangzhouCivilAviationCollege,Guangzhou510403,Guangdong,China)2(GuangzhouCollegeofSouthChinaUniversityofTechnology,Guangzhou510800,Guangdong,China)Abstract Becauseoftheuncertaintyofbirdflightroutes,birdstrikesoftenoccurandaviationsafetyisseriouslythreatened.Therefore,effectivemeasuresmustbetakentopreventsuchincidents.Basedonthecharacteristicsofexistingbird repellingequipmentandairportgeographicenvironment,thispaperproposesaschemeofbuildingairportintelligentbird repellingsystembasedonInternetofThings.ItsolvedtheproblemoftransmissiondistanceofZigBeenetworkbyusingthedesignofseveralstartopologiestoconstructnetworktopology,especiallythedesignofhardwareandsoftwareofroutingnodeswhichplayedakeyroleinnetworktopology,andrealizedthepurposeofZigBeenetworkinairportarea.Theexperimentsverifytheeffectivenessoftheproposedroutingnode,whichimprovesthebird repellingeffectoftheoriginalairportbirdrepellingequipment.Keywords Birdstrike Birdrepellingequipment InternetofThings Routingnode0 引 言鸟类的飞行路线是难以预测的,而人类的飞行却是有规划的,因此当两者同时在有限空间里飞行时就必然会发生相撞的事故,也就是鸟击又名鸟撞。
宿舍阳台驱鸟设计方案

宿舍阳台驱鸟设计方案
为了解决宿舍阳台常被鸟儿滋扰的问题,需要进行相应的驱鸟设计方案。
下面是一个针对宿舍阳台的驱鸟设计方案,供参考。
一、安装边角装置
1. 安装鸟儿喜欢站立的边角装置,如尖锐的植物苗木、或者环状的铁丝网。
这样可以阻止鸟儿停留在阳台的边缘。
二、安装挡风网
1. 安装挡风网,可以阻止鸟儿进入阳台内部。
挡风网可以采用透明或半透明的材质,以兼顾视觉效果和风的透过性。
三、安装驱鸟器
1. 驱鸟器是一种可以发出驱赶鸟儿的声音或频率的装置。
可以根据需要选择合适的驱鸟器来使用。
常见的驱鸟器有超声波驱鸟器和声音驱鸟器。
超声波驱鸟器通过发出高频超声波来驱赶鸟儿,而声音驱鸟器则通过模拟鸟类天敌的叫声来驱赶鸟儿。
四、使用鸟类驱避剂
1. 鸟类驱避剂是一种可以使鸟儿产生不适感的剂,通过喷洒在阳台上可以有效地驱赶鸟儿。
这些驱鸟剂通常是一种无害的化学物质,对人体和环境没有伤害。
以上是一个针对宿舍阳台的驱鸟设计方案。
在使用这些设计方案的过程中,需要根据具体情况进行调整和改进。
希望以上方案能够对解决宿舍阳台常被鸟儿滋扰问题有所帮助。
一种综合性驱鸟系统的设计与实现

进行 调研 ,制 定相 应 的驱 鸟策略 ,进 行 对应的驱 鸟 ,避免 盲 目性 操作 ;最后 ,根 据制 定的驱 鸟策略 利 用 超 声波技 术 、强闪光 以及 冲击 波驱 鸟技 术 ,对 落在 变 电站 设备 构 架上 的鸟 类进 行探 测 与驱赶 。 经试
验 验证 :该 系统 具有 高鲁棒 性 、灵 活性 和驱 鸟效 果持 续 时间长 等优 点 ,可满足 变 电站的驱 鸟需6 No.4
电子设 计 工程
Electronic Design Engineer ing
2018年 2月
Feb.2018
一 种 综合 性 驱 鸟 系统 的设 计 与 实 现
、
田 杰 ,余 鹏 。陈 硕 (1.深 圳供 电局 有 限公 司 广 东 深圳 518000;2.深圳供 电局 有 限公 司 电力技 术研 究 中心 ,广 东 深圳 518000)
关键 词 :探 测技 术 ;变 电站 ;驱 鸟 系统 ;冲击 波驱鸟
中图分 类号 :TP91 l
文献标 识码 :A
文章编 号 :1674—6236(2018)04—0141—04
The design and im plem entation of an integrated system for birds repelling
近 年 来 ,随 着 社 会 对 自然 生 态 环 境保 护 意识 的 鸟 害 装 置 ,虽 然 其 的推 广使 用 能 明显减 少 输 电线 路 加强 ,鸟类 的活 动范 围逐 渐 扩大 ,繁 衍数 量也 在 日益 事 故 ,但 是 在某 些地 区仍 有 鸟在 鸟刺 上筑 巢 ,且 防鸟 增加 。有 的鸟将 窝巢 搭建 在 输 电线 路或 变 电站 的杆 刺 大多 是金 属 导体 ,易 引起短 路 ,致使 鸟刺 的防鸟 害
219432405_基于物联网的智能驱鸟系统设计
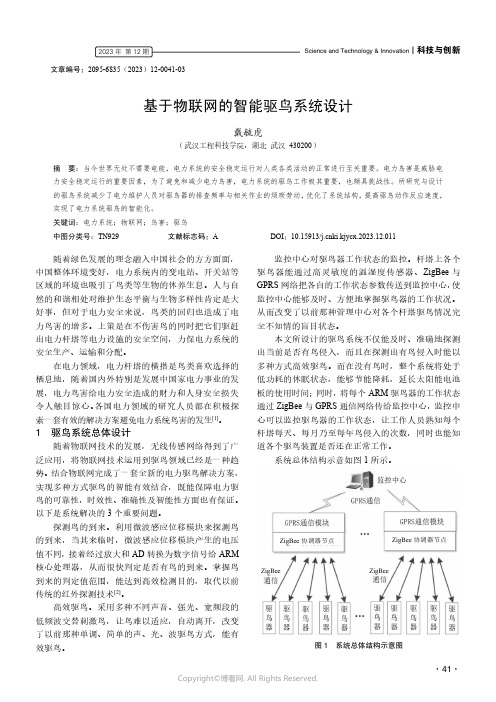
Science and Technology &Innovation ┃科技与创新2023年第12期·41·文章编号:2095-6835(2023)12-0041-03基于物联网的智能驱鸟系统设计戴毓虎(武汉工程科技学院,湖北武汉430200)摘要:当今世界无处不需要电能,电力系统的安全稳定运行对人类各类活动的正常进行至关重要。
电力鸟害是威胁电力安全稳定运行的重要因素,为了避免和减少电力鸟害,电力系统的驱鸟工作极其重要,也颇具挑战性。
所研究与设计的驱鸟系统减少了电力维护人员对驱鸟器的排查频率与相关作业的烦琐劳动,优化了系统结构,提高驱鸟动作反应速度,实现了电力系统驱鸟的智能化。
关键词:电力系统;物联网;鸟害;驱鸟中图分类号:TN929文献标志码:ADOI :10.15913/ki.kjycx.2023.12.011随着绿色发展的理念融入中国社会的方方面面,中国整体环境变好,电力系统内的变电站、开关站等区域的环境也吸引了鸟类等生物的休养生息。
人与自然的和谐相处对维护生态平衡与生物多样性肯定是大好事,但对于电力安全来说,鸟类的回归也造成了电力鸟害的增多。
上策是在不伤害鸟的同时把它们驱赶出电力杆塔等电力设施的安全空间,力保电力系统的安全生产、运输和分配。
在电力领域,电力杆塔的横搭是鸟类喜欢选择的栖息地,随着国内外特别是发展中国家电力事业的发展,电力鸟害给电力安全造成的财力和人身安全损失令人触目惊心。
各国电力领域的研究人员都在积极探索一套有效的解决方案避免电力系统鸟害的发生[1]。
1驱鸟系统总体设计随着物联网技术的发展,无线传感网络得到了广泛应用,将物联网技术运用到驱鸟领域已经是一种趋势。
结合物联网完成了一套全新的电力驱鸟解决方案,实现多种方式驱鸟的智能有效结合,既能保障电力驱鸟的可靠性,时效性、准确性及智能性方面也有保证。
以下是系统解决的3个重要问题。
探测鸟的到来。
利用微波感应位移模块来探测鸟的到来,当其来临时,微波感应位移模块产生的电压值不同,接着经过放大和AD 转换为数字信号给ARM 核心处理器,从而很快判定是否有鸟的到来。
全自动驱鼠、驱鸟装置的设计及应用
全自动驱鼠、驱鸟装置的设计及应用摘要:我厂的机采井设备、中转站和联合站多位于野外,在此环境中生活着很多鸟类和鼠类,它们喜欢在机采井的开关箱内筑窝,箱体内电缆与元器件连接部位裸露带电,小动物在此空间内活动容易发生短路事故。
在中转站和联合站的电缆沟内,有老鼠进入,有时它们还钻进配电柜内。
在电缆沟和配电柜内有很多电缆、导线、电器元件,容易被老鼠咬破而发生短路事故甚至发生火灾。
带来很大的安全隐患。
基于这种实际情况,研制出全自动驱鼠、驱鸟装置,该装置的主要功能是通过红外线感应器检测来发现老鼠、鸟类,触发声音报警器和高频闪光灯工作,发出声音和强光来改变周围的环境,惊吓小动物,使小动物不敢进入,彻底杜绝了此类事故的发生。
关键词:行程开关 ,红外线感应开关, 热释电红外探测器, 声音报警器, 高频闪光灯1.全自动驱鼠、驱鸟装置设计要求1.1设计全自动驱鼠、驱鸟装置的目的和意义我厂的机采井设备、中转站和联合站多位于草丛和田地里,在此环境中生活着很多鼠类和鸟类,它们喜欢在机采井的配电箱中筑窝,配电箱中有各种电器元器件,导线和电缆,这些元件在正常情况下都有电通过,小动物在箱内活动容易发生短路事故,造成元器件的损坏使机采井设备停止运行,这不仅影响油井产量,同时也加大了工作人员不必要的劳动强度。
在中转站和联合站的电缆沟及配电柜内,老鼠因其生理关系,喜欢啃咬导线和电缆,容易发生短路、漏电事故,严重的易发生火灾,造成严重的经济损失,如果操作人员工作时不慎接触到漏电部位,则发生触电事故,危及工作人员生命安全。
为了杜绝此类事故的发生,就必须对这些动物进行驱赶,针对这些动物喜欢阴暗、安静的环境的生活习性,研制出全自动驱鼠、驱鸟装置,该装置通过检测发现小动物,然后发出强光和噪声来改变环境状态,达到惊吓的目的,从而使小动物不敢进入配电箱或配电柜中,起到保护作用,杜绝因小动物引起的短路、漏电、失火的事故发生。
1.2全自动驱鼠、驱鸟装置的设计要求通过对现场观察,以及对各元器件构造及其功能的了解积累,针对全自动驱鼠、驱鸟装置装置进行设计,其设计要求如下(1)全自动驱鼠、驱鸟装置运行安全可靠,不影响其它设备正常工作(2)全自动驱鼠、驱鸟装置检测灵敏、快速、准确(3)全自动驱鼠、驱鸟装置对人体不产生危害2. 全自动驱鼠、驱鸟装置的结构及其原理2.1全自动驱鼠、驱鸟装置的元器件的选择全自动驱鼠、驱鸟装置由漏电保护断路器,行程开关、红外线感应开关、声音报警器,高频闪光灯及连接导线构成。
驱鸟器毕业设计

目录前言 (1)第1章绪论 (3)§1.1 鸟类对输电安全的影响 (3)§1.2 驱鸟器的驱鸟原理 (3)§1.3 驱鸟器的总体设计 (4)第2章驱鸟器的硬件设计 (7)§2.1 单片机系统设计 (7)§2.1.1 单片机的选择 (7)§2.1.3传感器选择 (7)§2.2 系统的硬件接口设计 (8)第3章驱鸟器飞鸟检测软件设计 (10)§3.1 软件设计的任务 (10)§3.2 软件设计的内容 (10)§3.3 主程序设计 (10)§3.4 定时器T0中断程序设计 (12)§3.5 外部中断0中断程序设计 (13)第4章驱鸟器语音输出软件设计 (17)第6章驱鸟器使用说明书 (24)第7章驱鸟器测试分析报告 (25)第8章驱鸟器项目开发总结 (28)结论 (30)参考文献 (32)致谢....................................................................错误!未定义书签。
附录 (34)一、ISD2560内部地址单元寻址 (34)二、功能样机照片 (35)前言随着工农业生产的迅速发展和社会用电需求的不断提高,人们对输电线路供电可靠性的要求越来越高,但值得注意的是鸟类的生息繁衍条件逐年得到改善,由于鸟类活动引起的输电线路跳闸事故近几年却有不断增多的趋势。
鸟害故障已成为电力线路的频发性故障之一。
因此,如何降低鸟类活动对输电线和变电站电力设备危害已成为世界性的课题。
鸟类对电力线路的危害主要表现在:(1)鸟类筑巢,口叼树枝,铁丝在空中往返飞行,当树枝等掉落在线路导线间或反搭在导线与横担上就会造成短路事故;杆塔上鸟巢被风吹散亦会造成类似情况,引起短路事故。
(2)较大鸟类在导线间飞行,争斗可能导致相间短路。
(3)鸟粪污染瓷裙,或稀粪沿瓷瓶下流时可能会造成闪络。
无线驱鸟炮系统设计与实现
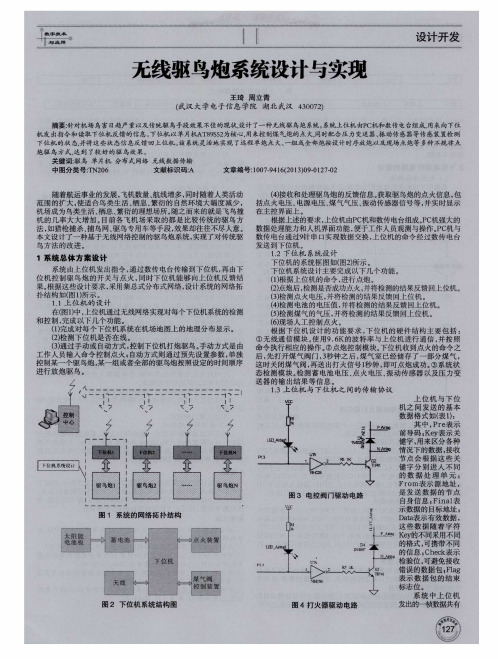
随着航运事业的发展 , 飞机数量、 航 线增多 , 同时随着 人类 活动 范围 的扩大 , 使适合鸟类生 活、 栖息 、 繁衍 的 自然环境大幅度减少 , 机场成为鸟类生 活、 栖息 、 繁衍 的理想场所。 随之而来的就 是飞鸟撞 机的几率 大大增加 。 目前各飞机场 采取的都 是比较传统 的驱 鸟方 法, 如猎枪捕 杀、 捕鸟网、 驱鸟专用车等手段 , 效果却往往 不尽 人意 。 本文设计了一种基于无线 网络控制的驱鸟炮系统 , 实现 了对传统驱 鸟 方 法 的 改进 。
圜豳 瞳 雷 醴圈 疆
霪 璺 圜髓
鞫 目 _ _ _ 豳一 _ _ 囹 g 豳 E _ _ g _ 日 _ 圈 一 豳 . ’ 豳∞ ห้องสมุดไป่ตู้_
戮 薅 甚 嘲 豳 I 圈 童 E i 目 E 目 ■ i 嘲 强 圈 豳 I 豳 圈 豳
圉 曩 ■ ■ 曩 啊
_ _ 十 f 丽
l
技 术
设计 开发
无线驱鸟炮系统设计与实现
王 琦 周 立 青
上 一
( 武 汉大 学 电子信 息 学院 湖 北武 汉 4 3 0 0 7 2 )
摘 要: 针 对机场 鸟害 日 趋 严重 以及传统驱 鸟手段 效果 不佳 的现状 , 设 计 了一种 无线驱 鸟炮 系统。 系统上 位机 由P C 机和数传 电 台组成, 用来向下位 机发 出指令 和读 取下位 机反馈 的信 息 。 下位机 以单片,  ̄A T 8 9 S 5 2 为核 心, 用来控制 煤 气炮的点 火, 同时配合压 力 变送 器、 振 动传 感器等传 感装置检 测 下位 机 的状 态。 并将 这些 状态信 息反馈 回上位机 。 该 系统灵 活地 实现 了远程 单炮 点 火、 一 组或全部 炮按设 计时序放 炮 以及现 场点 炮等 多种 不规律 点
空港智能鸟驱系统设计与实现说明书

Design and implementation of the upper computer of airport intelligent bird-driving systemYutong Chen1*, Yufen Liu2,Yuqin Chen1, LiCheng Liu31. GuangZhou Civil Aviation College2. Civil Aviation University of China3. Guangdong University of TechnologyAbstract—The single, repetitive and aimless approach to the driving of birds in the existing airport field caused the birds to quickly "develop" the inertial indication, which was almost "immune" to the equipment, and put heavy pressure on the work of the airport.Nowadays, with the increasing number of flights, how to design and develop an intelligent system for driving birds, so as to make driving birds more scientific, intelligent and effective has become the research focus of the current work on driving birds.The intelligent bird drive system studied in the project links the motion of the bird drive equipment with the bird situation information, and combines the current popular Internet of things technology to effectively avoid the blind startup of the bird drive equipment caused by human wrong commands. It not only responds to the adaptability of birds to the drive equipment, but also improves the effect of the drive equipment.Keywords—Bird repellent device; Inertial indication; Internet of things deep learningI.I NTRODUCTIONWith the rapid development of aviation industry, people pay more and more attention to the damage and loss caused by aviation disaster.A large proportion of aviation disasters occur during takeoffs and landings, and the main cause of this type of aviation disaster is bird strikes [1].Bird strikes, also known as bird strikes, are accidents caused by collisions between aircraft operating at high speeds in the air or on the ground and birds in the air.Bird strikes have the characteristics of suddenness and variability. The flight accidents caused by bird strikes not only bring economic loss, but also bring life safety hazards, which always threaten the personal safety of passengers and aircrew. Slight bird strikes cause damage to aircraft parts, and severe bird strikes can lead to the destruction of aircraft [2].It can be seen that from the perspective of the harm caused by bird strikes to aircraft, and from the perspective of its development trend, bird strikes cannot be ignored. Effective methods must be found to curb the occurrence of such events, that is, how to achieve "efficient" drive birds and change the status quo of driving birds from "passive" to "active".In view of this problem, and under the background of the integration of military and civil, our school bird strike disaster application research center has jointly applied for many projects together with a department of the Chinese Air Force, Civil Aviation University of China, Guangdong University of Technology and other units. Aiming at this problem, this paper proposes to build a bird driving system based on the Internet of things, which can solve the resource cost problem caused by the increase of device load, and lay a foundation for the promotion of future projects.II.S YSTEM ARCHITECTURE DESIGNA.The Concept of Large-scale NetworkThe main purpose of establishing the iot system network is to provide network support for the existing system, which is the hardware foundation and the core part of building the remote control system platform.This system according to the requirements of the particularity of the airport, the use of a wireless network for data transmission, network topology structure of the system is shown in figure 1, it USES the Zigbee network and short wave form in the airport area wireless network interactive way bird information transmission network, the gas gun, titanium ray guns, double bang firecracker, block bird net and voice QuNiao fusion in wireless QuNiao network, form a complete bird information query, data processing and intelligent linkage QuNiao efficiently regulateQuNiao system.Fig. 1.Schematic diagram of system architecture.ZigBee technology is a communication technology based on IEEE802.15.4 protocol standard [3].It has become a research hotspot in wireless communication networks. ZigBee technology is characterized by low speed, low power consumption, short time delay, high capacity and low cost.3rd Joint International Information Technology, Mechanical and Electronic Engineering Conference (JIMEC 2018)ZigBee network node devices in the WSN network [5] are divided into three common types: network coordinator nodes, routing nodes and terminal nodes.Any network in topology form needs a network coordinator node, and it is unique. The routing node can carry out data forwarding and network extension, and the terminal node is generally used for signal acquisition and processing.A wireless ZigBee module is installed on the hand-holding machine for bird situation information acquisition, which can communicate and control with Gas Gun, Block Bird Net, Titanium Ray Guns, Double Bang Firecracker and Speech Drive connected to the ZigBee network.The base station can communicate with the main station through the short-wave network. After receiving, parsing and processing the command information of the platform received from the short-wave network, it will be sent to the relevant bird-driving equipment through the ZigBee network for the bird-driving action control.Gas Gun, Block Bird Net, Titanium Ray Guns, Double Bang Firecracker and Speech Drive can also be able to send the status information through the ZigBee network to the base station.The base station analyzes the information received and uploads to the server platform by short wave communication. The server online records whether the working state of each device is normal or not, and if there is abnormal, it will make a report to the police response[4].In addition, relay nodes can communicate with each other to prevent repeated transmission of information, causing congestion of communication lines, reduce communication load of the main station, prevent unnecessary communication pressure on the main station of the server platform, and display the work status information of the relay station on the software platform.III.D ESIGN OF SERVER UPPER COMPUTERA.Upper computer interface designyIn order to make the iot system more user-friendly, it is necessary to create the visual software of airport bird monitoring system.According to terminal bird-driving personnel needs, based on past observations of bird data, using advanced computer software development technology, put the pictures of the birds, shape characteristics, feather characteristics, living habits, flying height, the threat level of the aircraft and bird populations, quantity, activity and other relevant information input to the computer.The next step is to design and develop the system.Considering the software of portable mobile device needs to be developed in the later stage of project, the development tool adopts the scheme of QT 5.7.0 + ACCESS 2010, so as to develop the upper computer software of airport bird-driving system with simple interface, easy to use, portability, expansibility and good maintenance. Through the analysis of the system’s detailed demand, the following functions are designed and implemented for the system. The system use case diagram is shown in figure 2:1) The user of the system is divided into different levels and authority control, specifically, different users are given different reasonable permissions to ensure the security of the system.2) Management of basic information: management personnel of airport bird information data can maintain the information stored in the system, including adding new information and deleting existing error information.3) Management of query: general staff of the airport can query the bird information of the bird information query management system, which mainly provides convenience for the daily bird strike prevention work of the airport.4) Be able to maintain bird information in the database at any time.5) The system database can be updated at any time to add the latest bird information to the system.6) Be able to send equipment control commands and receive equipment status information through established network.ManagerFig. 2.System use case diagram.B.Establishment and connection of bird databaseAccording to the long-term cooperation and investigation between the bird strike disaster application technology research center of guangzhou civil aviation vocational and technical college and a department of the Chinese air force, a total of 38 species of birds were involved in the airport, including birds such as egret, cattle back egret, green wing duck, sandpiper, red falcon and turtledove. The related birds are shown in FIG.4.Fig. 3. Images of birds involved in the fieldQt mainly operates the database through QtSql module, so a line of code "Qt += SQL" needs to be added in the project file (.pro file) to use the database module.In order to read the data in the database in the main window, you can create an associated database class firstly and then instantiate it in themain window.The database class implementation code are as follows:data_base::data_base(QObject *parent) : QObject(parent) {db= &QSqlDatabase::addDatabase("QODBC");//Set the database Driverdb->setDatabaseName("connectDatabase");bool ok = db->open();if (!ok){qDebug()<<"Database open failed. ";qDebug()<<db->lastError();this->connected=0;}else{qDebug()<<"Database open success. ";this->connected=1;row=new QSqlRecord();model=new QSqlTableModel(this,*db);model->setTable("BirdInfo");model->setSort(0,Qt::AscendingOrder);//Set column namemodel->setHeaderData(1,Qt::Horizontal,tr("Chinese name "));model->setHeaderData(2,Qt::Horizontal,tr("English name "));model->setHeaderData(3,Qt::Horizontal,tr("Hazard rating "));model->setHeaderData(7,Qt::Horizontal,tr("Lowest altitude "));model->setHeaderData(8,Qt::Horizontal,tr("Highest altitude "));model->setHeaderData(10,Qt::Horizontal,tr("Note"));model->setHeaderData(11,Qt::Horizontal,tr("The cluster type "));model->setEditStrategy(QSqlTableModel::OnManualSubmit);if(!model->select()){qDebug()<<"The database of model set failed:"<< model->lastError();}else{qDebug()<<"The database of model set success:";}}}munication interface designThe program written by Qt is used as the upper computer software. If you need to communicate with the lower computervia USB, you need to communicate with the serial port inQt.The serial port is the bridge connecting the upper machinewith the lower machine, so its design is related to the successor failure of the project to a certain extent.To communicatewith the underlying machine in the main window, you cancreate a QSerialPort serial object and then manipulate it.Thesystem provides users with two connection modes, namely automatic connection and manual connection, in which the manual connection code are as follows:bool communication_layer::auto_connect_cood(){bool state=false;#ifndef CONNECT_WITHOUT_ZIGBEEforeach(const QSerialPortInfo &info, QSerialPortInfo::availablePorts()){qDebug()<<"Name:"<<info.portName();qDebug()<<"Description:"<<info.description();qDebug()<<"Manufacturer:"<<info.manufacturer();serial->setPort(info);if(serial->open(QIODevice::ReadWrite)){//Set Baudrateserial->setBaudRate(115200);// Set Data bitsserial->setDataBits(QSerialPort::Data8);// Set Check digitserial->setParity(QSerialPort::QSerialPort::OddParity);// Set Flow controlserial->setFlowControl(QSerialPort::NoFlowControl);// Set stop bitsserial->setStopBits(QSerialPort::OneStop);qDebug()<<info.portName()<<"open success";state=true;connection_state=true;emit zigbee_connected_sig();//发送连接成功信号break;}else{qDebug()<<"open failed";}}#elseqDebug()<<"open success";state=true;connection_state=true;emit zigbee_connected_sig();#endifreturn state;}.IV.D ESIGN OF MESSAGE PROCESSING MODULE The message exchanged between the upper computer and the lower machine is the device open command sent by the host and the device state information sent from the machine. With the increase of the number of devices mounted in the field, the data collected by the sensor also increases exponentially.A large amount of data will inevitably lead to problems such as increased CPU occupancy and large memory overhead. In order to avoid bottlenecks at the later stage of the project, which leads to doubling of hardware costs, the design of the message processing module refers to the encoding and decoding mode of 4G mobile communication, namely asn.1 encoding and decoding.Asn.1 includes several standard coding rules, such as basic encoding rules (BER) - x.209, specification encoding rules (CER), identification name encoding rules (DER), compression encoding rules (PER) and XML encoding rules (XER).These coding rules describe how the values defined in asn.1 are encoded for transmission, regardless of factors such as the computer, programming language, or how it is represented in the application.Asn.1's encoding method is more advanced than many competing markup systems, which support fast and reliable transmission of expandable information - an advantage in wireless broadband, hence the introduction of the codec technology in the project.Where PER is an asn.1 encoding rule designed on the basis of BER, its advantage is that it can effectively reduce the encoding and decoding overhead of messages [5].Considering the increasing data volume overhead at the later stage of the project, the system adopted PER coding rule.The PER codestructure is shown in figure 5. Its essence is the "nesting ofcoding on demand" structure. When relevant information needsto be transmitted, resources can be reallocated.preamble length contents...preamble length contents preamble length contents...Fig. 4.PER code structure diagramAccording to asn.1 encoding and decoding rules, theencoding rules as shown in table 1 can be designed, in whichthe data head and tail are of type char, the commands and dataare of typedef, and "int bits_justons" are used to indicate themissing bits in a binary string.TABLE I. ASN.1 CONVERSION RULEAsn.1 type C typeHEAD char COMMAND typedefstructCOMMAND_s{uint8_t* buf;int size;int bits_unused;}DATA typedef struct DATA _s{uint8_t* buf;int size;int bits_unused;}TAIL charV.T HE EXPERIMENTAL TEST1) Database connection test.In the main interface, the bird information in the field can be accurately queried through thequery function, which helps the field staff to make a better judgment.Fig. 5.successful bird information query2) Communication interface test.When the USB cable is connected with the lower computer, the connection on the maininterface is realized through the serial port connection function.When the corresponding equipment is turned on, thesending command data can be observed in the printing windowof the serial port, which indicates that the serial port is workingnormally and can communicate with the lower computer.When the USB is disconnected from the lower computer, the softwarecannot be connected, which is expected.Fig. 6.Test diagram for serial connectionA CKNOWLEDGMENTThis paper designs and implements the upper computer of airport intelligent bird-driving system, and puts forward some improvement methods for its previous problem of sharp increase of data quantity after the increase of equipment quantity.Finally, the effectiveness of these methods is verified through simulation and test results, which is of great significance for the system to mount more bird driving equipment in the future.In the next step, the deep learning method will be combined to explore the smart bottom line of the system and help the airport to do a good job of security.R EFERENCES[1]NING Huan-sheng,CHEN Wei-shi,MAO Xia,et al.Bird-aircraft strikeavoidance radar[J].IEEE Aerospace and Electronic Systems Magazine,2010,25(1):19-28..[2]David Bradbeer, Eoin Ryan, Ian Witter.Wildlife Hazard ManagementHandbook(Second Edition)[M]. Airports Council International, 2013. [3]Alliance Z B. ZigBee standards overview[J]. Retrieved from www.zigbee. org, 2017.[4]Rappaport T S, Annamalai A, Buehrer R M, et al. Wirelesscommunications: past events and a future perspective[J].IEEE Communications Magazine, 2002, 40(5): 148-161.[5]Stables E R, New N D. Birds and aircraft: the problems[C]. TheProblems of Birds as Pests:Proceedings of a Symposium Held at theRoyal Geographical Society, London, on 28 and 29 September 1967.Elsevier, 2013.[6]Li M, Wei H.Overview of Physical Bird DrivingTechnology[J].Agricultural Engineering, 2013: S1。
无线远程控制智能驱鸟系统研究
无线远程控制智能驱鸟系统研究王晓坤;魏思东;王宏峰;刘晓峰【摘要】This paper analyzes the current status of military airport bird control and designs an one-to-many intelligent wireless remote control bird repellent system based on STM32F407A and nRF2401. The overall design of the system and hardware designs have been done in this paper. The system meets the requirements by laboratory testing and field testing and can realize effective bird repellent within the three dimensional airport airspace.%分析了当前军用机场鸟害防治的现状,设计了基于STM32F407A和nRF2401的驱鸟车和驱鸟器"一对多"无线远程控制智能系统,阐述了系统的整体设计和硬件设计方案.该系统可靠性好、易于扩展和更新、升级,能实现机场空域三维空间内有效驱鸟.【期刊名称】《长春理工大学学报(自然科学版)》【年(卷),期】2015(038)006【总页数】6页(P163-167,171)【关键词】nRF24L01;STM32F407A;无线通信【作者】王晓坤;魏思东;王宏峰;刘晓峰【作者单位】空军航空大学,长春 130022;空军航空大学,长春 130022;空军航空大学,长春 130022;空军航空大学,长春 130022【正文语种】中文【中图分类】TP23目前,国际航空联合会已把鸟害升级为“A”类航空灾难。
驱鸟器毕业设计(一)

驱鸟器毕业设计(一)引言概述:驱鸟器是一种用于防止鸟类进入特定区域的设备,它可以应用于农田、果园、建筑物等各种领域。
本文是关于驱鸟器的毕业设计(一)的文档,旨在介绍驱鸟器的原理、设计要点和实现方法。
正文:1. 驱鸟器的原理:a. 利用声音原理:通过发出特定频率的声波,刺激鸟类的听觉系统,使其感到不适从而远离目标区域。
b. 利用光线原理:通过发出闪烁的光线,刺激鸟类的视觉系统,使其感到惊扰从而不再停留在目标区域。
2. 驱鸟器的设计要点:a. 频率选择:根据目标鸟类的听觉敏感范围,选择合适的频率进行声波发射。
b. 音量控制:根据目标区域的大小和环境噪声情况,控制声波的音量,以达到最佳的驱鸟效果。
c. 光线控制:根据目标鸟类的视觉特点,选择合适的光线颜色和闪烁频率,提高驱鸟效果。
3. 驱鸟器的实现方法:a. 声波发射:采用超声波发射器或扬声器,通过振动元件发出特定频率的声波。
b. 光线发射:采用LED灯或闪光灯,通过控制电路使其产生闪烁的光线。
c. 控制系统:使用微控制器或其他控制器,实现对声波和光线发射的频率、音量和闪烁模式的控制。
4. 驱鸟器的优势:a. 环保:驱鸟器采用声音和光线刺激的方式,无需使用有毒化学药剂,对环境无污染。
b. 高效:驱鸟器的声波和光线可以快速且有效地使鸟类远离目标区域,从而保护农作物和建筑物的安全。
c. 灵活性:驱鸟器可以根据不同的目标鸟类和驱鸟需求进行调整和优化,具有较高的适应性。
5. 驱鸟器的发展前景:随着农业和建筑业的发展,对驱除害鸟的需求越来越大。
驱鸟器作为一种非常有效的解决方案,具有广阔的市场前景。
未来,随着技术的不断进步和创新,驱鸟器将更加智能化和自动化,为人们提供更便捷和可靠的驱鸟解决方案。
总结:驱鸟器是一种用于防止鸟类进入特定区域的设备,它利用声音和光线刺激鸟类的听觉和视觉系统,从而远离目标区域。
本文介绍了驱鸟器的原理、设计要点和实现方法,并探讨了其优势和发展前景。
《面向功能的机场驱鸟ROS软件系统设计》

《面向功能的机场驱鸟ROS软件系统设计》一、引言随着航空交通的快速发展,机场安全成为了重中之重。
其中,鸟类活动对机场运行安全构成了严重威胁。
为了有效解决这一问题,本文提出了一种面向功能的机场驱鸟ROS(Robot Operating System)软件系统设计。
该系统设计旨在提高机场安全性能,确保飞机的正常起降与安全飞行。
二、系统设计背景及目标机场驱鸟ROS软件系统设计主要针对现有机场驱鸟技术存在的问题和需求。
当前,传统的人工驱鸟方法效率低下且难以满足大范围驱鸟的需求。
此外,现有的电子驱鸟设备缺乏统一管理和智能化操作的能力。
因此,该系统的设计目标是实现机场驱鸟的智能化、自动化和高效化,以提高机场安全性能。
三、系统设计功能1. 实时监测功能:通过安装摄像头等设备,实时监测机场各区域的鸟类活动情况,为后续的驱鸟操作提供依据。
2. 智能分析功能:利用图像识别和机器学习技术,对监测到的鸟类活动进行智能分析,判断其是否可能对飞机造成威胁。
3. 自动驱鸟功能:根据智能分析结果,自动控制驱鸟设备(如声波装置、驱鸟车等)进行驱鸟操作。
4. 统一管理功能:实现电子驱鸟设备的统一管理和远程控制,提高设备的管理效率和驱鸟效果。
5. 数据记录与统计分析功能:记录鸟类活动数据和驱鸟操作数据,为后续的优化和改进提供依据。
四、系统架构设计本系统采用ROS作为基础架构,实现各模块的协同工作。
系统架构包括感知层、决策层和执行层。
1. 感知层:负责实时监测机场各区域的鸟类活动情况,通过摄像头等设备采集数据。
2. 决策层:利用图像识别和机器学习技术对感知层传输的数据进行智能分析,判断是否需要启动驱鸟操作。
同时,根据历史数据和实时数据对驱鸟策略进行优化。
3. 执行层:根据决策层的指令,自动控制驱鸟设备进行驱鸟操作。
同时,将驱鸟操作数据和鸟类活动数据记录到数据库中。
五、关键技术及实现1. 图像识别技术:通过训练深度学习模型,实现对鸟类活动的智能识别和分类。
《机场智能驱鸟人机交互系统设计与实现》
《机场智能驱鸟人机交互系统设计与实现》一、引言随着航空交通日益繁忙,机场的安全问题也变得尤为重要。
在机场的日常管理中,驱鸟是一项非常重要的工作。
智能驱鸟人机交互系统的设计和实现对于确保航空器的安全、维护航空秩序至关重要。
本文将深入探讨智能驱鸟人机交互系统的设计与实现,以及该系统在机场安全保障方面的应用。
二、系统设计背景与目标在传统的机场驱鸟工作中,大多数依靠人力来完成驱鸟任务。
然而,这种方法在效率和准确性上都有很大的不足。
为解决这一问题,我们需要开发一种机场智能驱鸟人机交互系统。
该系统的设计背景在于提高机场的驱鸟效率,降低因鸟类活动导致的航空事故风险。
目标是通过采用先进的人工智能技术,实现人与机器的协同工作,实现对机场范围内鸟类的实时监测与有效驱赶。
三、系统设计与技术实现1. 系统架构设计本系统采用分层设计思想,主要分为数据采集层、数据处理层、人机交互层三个部分。
数据采集层通过摄像头、雷达等设备实时收集机场范围内的鸟类活动数据;数据处理层负责对这些数据进行处理与分析,以识别鸟类的种类、数量和活动轨迹;人机交互层则负责将处理后的数据以直观的方式展示给工作人员,并接受工作人员的指令,实现对鸟类的有效驱赶。
2. 关键技术实现(1)数据采集:本系统采用高清摄像头和雷达设备,实时收集机场范围内的鸟类活动数据。
其中,高清摄像头可捕捉到鸟类的图像信息,雷达则可监测鸟类的飞行轨迹和速度。
(2)数据处理:本系统采用基于深度学习的图像识别技术,对收集到的鸟类图像进行分类和识别。
同时,结合雷达数据,可实现对鸟类活动轨迹的实时监测和预测。
此外,系统还采用大数据分析技术,对历史数据进行挖掘和分析,以了解鸟类的活动规律和习性。
(3)人机交互:本系统通过图形化界面展示鸟类活动数据和预测结果,方便工作人员查看和分析。
同时,系统支持语音识别和语音合成技术,工作人员可以通过语音指令控制系统的运行。
此外,系统还具有远程控制功能,可实现跨区域、跨时区的协同工作。
基于输电线路的新型驱鸟装置设计与实现 朱海槟
基于输电线路的新型驱鸟装置设计与实现朱海槟摘要:文章以基于输电线路的新型驱鸟装置设计与实现为研究对象,首先简单介绍了输电线路的鸟害故障,随后分析了鸟害特点,最后围绕如何进行新型驱鸟装置的设计,提出了一些具体的设计实现思路与措施,以供参考。
关键词:输电线路;鸟害;驱鸟装置;设计实现前言:在输电线路跳闸的各种因素中,鸟害是继雷击、外力破坏、覆冰之后的第四大危害,尤其是在春夏季节,气温回暖,食物充足,高温多雨,而鸟类进入繁殖季节,因此停留在输电线路上的鸟类更多,更容易引发输电线路短路、闪络击穿等故障问题,不利于输电线路的安全。
而传统驱鸟方式较为落后,效率低下,需要通过对一种新型的驱鸟装置设计与实现进行探讨分析,更有助于保障输电线路的稳定性。
1.输电线路鸟害故障分析及鸟害特点分析1.1输电线路鸟害故障分析1.1.1鸟粪闪络分析鸟在输电线路之上经常会排泄一些粪便,从而会引起绝缘子出现闪络。
究其原因在于,由于很多鸟粪比较稀,因此本身导电率高,并且容易在绝缘子表面流淌,随着稀鸟粪不断增加,导致绝缘子表面被稀鸟粪覆盖,容易引发绝缘子裙边短接,出现闪络故障。
除此之外,鸟粪在经鸟类排泄后下落过程中,会导致绝缘子串附近的电场产生畸变,也会引发闪络击穿问题,这也是为什么在绝缘子表面干净的情况下会出现“不明闪络”问题的原因。
1.1.2鸟叨啄复合绝缘子分析一些鸟类受自身生长习性的影响,比如灰喜鹊、乌鸦等,在输电线路之上停留时,喜欢叨啄复合绝缘子硅橡胶伞裙护套,在长期的叨啄下,会导致裙套破坏,芯棒暴露,若发现不及时,容易引发严重的电力安全事故[1]。
1.1.3鸟类飞行故障一些鸟类自身体型比较大,并且喜欢在输电线路之间进行飞行嬉戏,而张开的翅膀有可能导致绝缘子串出现短接问题,很容易造成配电线路相间短路或单相接地故障。
1.2输电线路鸟害特点1.2.1区域性对于输电线路而言,尤其是架空线路,经常位于人烟稀少的荒郊野外,尤其是在河流、水库分布区域,由于这一区域水源丰富食物充足,而且周围很少有高大树木或树林,因此鸟类很喜欢在此区域内输电线路上筑巢和栖息,因此更容易引发输电线路鸟害问题。
基于无线通信的机场智能驱鸟系统的研制
基于无线通信的机场智能驱鸟系统的研制自世界上第一次鸟撞事故开始,鸟撞事故就成为航空业内的焦点。
随着航空业的发展,鸟撞对航空安全的影响越来越大,逐渐成为造成航空灾难的重要因素。
鸟撞事故的发生不仅造成了巨大的经济损失,而且严重威胁到飞行员的安全,目前鸟撞已经被认定为重大航空灾难之一。
鉴于此,防范鸟撞、保障飞行安全成为国际航空界必须解决的科学难题。
随着信息技术、通信技术和传感器技术的发展,充分把机场鸟撞防范工作与科技手段相结合,提高机场鸟撞防范工作的智能性、有效性,降低机场鸟撞事故的发生,符合我国机场对鸟撞防范工作的需求。
众所周知,机场鸟撞防范工作中的重点是鸟类的驱赶,采取有效的驱鸟手段提高驱鸟成功率,对鸟撞防范工作具有重要意义。
在机场驱鸟方面,目前常采用方法是以单体设备为主的随机性驱鸟。
该种方式具有一定的效果,但随着时间的推移,该种方式也暴露出一些不足之处。
驱鸟设备由于长时间安装在室外,容易受到恶劣环境的影响导致寿命降低;驱鸟设备多采用被动模式,必须通过工作人员的控制才能实现驱鸟;驱鸟方式多采用单体设备固定模式运行,鸟类会随着时间的推移产生适应性,效果下降;随机性驱鸟不能保证鸟类的飞行路线,有可能出现事与愿违的情况;驱鸟切入点仅从局部出发无法形成有效的全局控制,得不到最佳驱鸟效果。
针对以上情况,并结合前期项目中积累的机场驱鸟经验,本文提出了一种基于无线通信的机场智能驱鸟系统,该系统包括驱鸟设备、驱鸟网络、驱鸟策略和驱鸟控制等,本文研究就是基于此而展开的。
本文的主要研究内容包括以下几个方面:(1)埋地式声驱炮的研制。
本文总结了目前驱鸟设备的不足,结合嵌入式技术以及通信技术研制了新型的埋地式声驱炮,通过多种传感器的使用来提高驱鸟设备的稳定性和智能性,弥补了驱鸟设备上的不足。
(2)埋地式声驱炮阵的驱鸟策略研究。
该策略通过区域覆盖和驱鸟算法两部分实现。
区域覆盖是根据地理位置信息与驱鸟强度进行关联,利用不同的区域覆盖方法实现区域热点覆盖。
机场驱鸟网络无线通信协议及嵌入式软件实现的开题报告
机场驱鸟网络无线通信协议及嵌入式软件实现的开题报告一、研究背景和意义随着经济发展和人民生活水平的不断提高,人们越来越重视出行的安全和便利性。
作为交通枢纽的机场,更是在这方面扮演着重要角色。
但是,随着机场规模的扩大和飞机数量的增加,空管部门面临着一系列的安全挑战。
其中之一,就是如何有效地驱赶机场周边的鸟类,以防止鸟类误入机场跑道,对航班起降造成危害。
机场驱鸟问题的解决,需要一个智能化的系统帮助空管人员实现对机场周边的鸟类进行监测并做出相应的控制措施。
同时,这个系统也需要具备相关虚拟化技术,将监控数据实时传输至空管中心,并为空管人员提供实时的数据分析与管理。
而且,这个系统还需要跨平台、兼容性好的网络无线通信技术。
如何实现这个系统,为保障机场的安全和运营提供稳定的技术支持,是我们需要研究的问题。
二、研究内容和方法本次研究的主要内容包括:1. 建立驱鸟系统的数据平台。
通过建立驱鸟系统的数据平台,实现对机场周边鸟类的采集、分析、存储和对措施的制定。
2. 设计驱鸟网络无线通信协议。
基于现有的通信协议,针对驱鸟系统的工作要求,设计出一种符合机场环境、无干扰、可靠性高的网络无线通信协议。
3. 实现驱鸟系统的嵌入式软件。
针对驱鸟系统的要求,采用嵌入式技术,开发嵌入式软件,实现对鸟类的实时监测、分析和控制。
4. 对实现结果进行评估和优化。
基于实验结果评估和分析,在原有的方案基础上进行优化和改进,提升系统的功能和性能,并实现最终的系统目标。
研究方法主要包括实验、建立模型、数据分析和优化。
在实验中,我们将基于实际场景,搭建驱鸟系统的硬件设备,包括鸟类监测设备、传感器、网络通信模块等,并开发系统的软件模块,进行全面的测试和评估。
同时,针对实验数据进行统计和分析,提升系统的性能、稳定性和准确性。
三、研究成果和预期效果研究成果主要包括:1. 驱鸟系统的数据平台。
实现鸟类的实时监测、数据分析和控制,并提供相应的数据平台,以便空管人员对数据进行分析和处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无线驱鸟炮系统设计与实现作者:王琦周立青来源:《数字技术与应用》2013年第09期摘要:针对机场鸟害日趋严重以及传统驱鸟手段效果不佳的现状,设计了一种无线驱鸟炮系统。
系统上位机由PC机和数传电台组成,用来向下位机发出指令和读取下位机反馈的信息。
下位机以单片机AT89S52为核心,用来控制煤气炮的点火,同时配合压力变送器、振动传感器等传感装置检测下位机的状态,并将这些状态信息反馈回上位机。
该系统灵活地实现了远程单炮点火、一组或全部炮按设计时序放炮以及现场点炮等多种不规律点炮驱鸟方式,达到了较好的驱鸟效果。
关键词:驱鸟单片机分布式网络无线数据传输中图分类号:TN206 文献标识码:A 文章编号:1007-9416(2013)09-0127-02随着航运事业的发展,飞机数量、航线增多,同时随着人类活动范围的扩大,使适合鸟类生活、栖息、繁衍的自然环境大幅度减少,机场成为鸟类生活、栖息、繁衍的理想场所。
随之而来的就是飞鸟撞机的几率大大增加。
目前各飞机场采取的都是比较传统的驱鸟方法,如猎枪捕杀、捕鸟网、驱鸟专用车等手段,效果却往往不尽人意。
本文设计了一种基于无线网络控制的驱鸟炮系统,实现了对传统驱鸟方法的改进。
1 系统总体方案设计系统由上位机发出指令,通过数传电台传输到下位机,再由下位机控制驱鸟炮的开关与点火,同时下位机能够向上位机反馈结果。
根据这些设计要求,采用集总式分布式网络,设计系统的网络拓扑结构如(图1)所示。
1.1 上位机的设计在(图1)中,上位机通过无线网络实现对每个下位机系统的检测和控制,完成以下几个功能。
(1)完成对每个下位机系统在机场地图上的地理分布显示。
(2)检测下位机是否在线。
(3)通过手动或自动方式,控制下位机打炮驱鸟。
手动方式是由工作人员输入命令控制点火;自动方式则通过预先设置参数,单独控制某一个驱鸟炮,某一组或者全部的驱鸟炮按照设定的时间顺序进行放炮驱鸟。
(4)接收和处理驱鸟炮的反馈信息。
获取驱鸟炮的点火信息,包括点火电压、电源电压、煤气气压、振动传感器信号等,并实时显示在主控界面上。
根据上述的要求,上位机由PC机和数传电台组成。
PC机强大的数据处理能力和人机界面功能,便于工作人员观测与操作。
PC机与数传电台通过9针串口实现数据交换,上位机的命令经过数传电台发送到下位机。
1.2 下位机系统设计下位机的系统框图如(图2)所示。
下位机系统设计主要完成以下几个功能。
(1)根据上位机的命令,进行点炮。
(2)点炮后,检测是否成功点火,并将检测的结果反馈回上位机。
(3)检测点火电压,并将检测的结果反馈回上位机。
(4)检测电池的电压值,并将检测的结果反馈回上位机。
(5)检测煤气的气压,并将检测的结果反馈回上位机。
(6)现场人工控制点火。
根据下位机设计的功能要求,下位机的硬件结构主要包括:①无线通信模块。
使用9.6K 的波特率与上位机进行通信,并按照命令执行相应的操作。
②点炮控制模块。
下位机收到点火的命令之后,先打开煤气阀门,3秒钟之后,煤气室已经储存了一部分煤气,这时关闭煤气阀,再送出打火信号1秒钟,即可点炮成功。
③系统状态检测模块。
检测蓄电池电压、点火电压、振动传感器以及压力变送器的输出结果等信息。
1.3 上位机与下位机之间的传输协议上位机与下位机之间发送的基本数据格式如(表1):其中,Pre表示前导码;Key表示关键字,用来区分各种情况下的数据,接收节点会根据这些关键字分别进入不同的数据处理单元;From表示源地址,是发送数据的节点自身信息;Final表示数据的目标地址;Data表示有效数据,这些数据随着字符Key的不同采用不同的格式,可携带不同的信息;Check表示检验位,可避免接收错误的数据包;Flag表示数据包的结束标志位。
系统中上位机发出的一桢数据共有9bytes,格式如(表2)。
为了减小干扰,在命令字节前后各加了1byte的防干扰冗余码。
并且数据包以防干扰冗余码作为结束标志位。
下位机返回的一桢数据共有13bytes。
包含了帧头、目的地址、源地址、多个防干扰冗余码、电源电压值、点火电压值、压力电压值、校验等数据。
2 下位机硬件电路的设计2.1 无线传输模块系统中下位机使用电池作为电源,故无线传输模块应满足使用单电源5V左右供电,且功耗低;接收灵敏度高,传输距离至少应有5千米;误码率低,抗干扰能力强;可用于点对点、点对多点、多点对点等多种通信组合方式等多个要求。
在实际测试中,我们选择了数传电台JZ875,可实现6千米的直线通信距离。
2.2 单片机和ADC选用最为通用的51系列单片机Atmel 89S52,外扩AD芯片实现数据采样,同时检测数据电压采集包括电源电压、点火电压、振动信号、煤气压力信号,必要情况下加上温度信号,对电压精度和采样速率要求都比较低。
因此对于这样的一个多电压的采集系统,可以使用多通道AD转换芯片AD0809来实现。
2.3 电控阀门驱动模块系统使用AirTAC电控阀门,AirTAC阀门的驱动电路由NPN型三极管TIP41C和逻辑非门组成,如(图3)所示。
(图3)中P_AirTAC为恒压11.3V,当P1.3输出低电平时,74HC04的2脚输出高电平,TIP41C的射极导通,N_AirTAC输出低电压,阀门打开。
当P1.3输出高电平时,TIP41C基极为低电平,射极不能导通,N_AirTAC脚电压较高,线圈电压不足,阀门闭合。
2.4 电打火器驱动模块打火器驱动电路由NPN型三极管TIP9013和六非门逻辑芯片74HC04组成,如(图4)。
当P1.4输出低电平时,74HC04第4脚输出高电平,9013射极导通,N_Fire脚输出低电压,而P_Fire电压恒为11.3V,这时打火器会打火。
当P1.4输出高电平时,4脚为低电平,9013射极不能导通,N_Fire脚电压较高,P_Fire与N_Fire之间电压差很小,打火器不打火。
2.5 振动传感器模块在下位机中,振动传感器用来检测上位机发出命令后煤气炮开炮是否成功。
由于对振动只有定性的要求,而没有量的要求,故采用机械接触型振动传感器振动传感器的后级处理电路如(图5)。
图中振动传感器静止时阻值为零,在振动时,阻值变大(在1K欧姆以上),和1K欧姆电阻之间的电压随之变大,这个电压经过一个射极跟随送到ADC0809中,单片机读取后,通过与内部预先设置的门限电压进行比较,就可以判断煤气炮开炮是否成功。
2.6 压力变送器模块为了方便在煤气不足时进行补充,需要使用压力变送器测量煤气罐的气压。
系统选用的是CYYB-110系列小型压力变送器。
在煤气罐压力为0.5~1.2MPa的情况下,对应输出电压为1.56V~ 3.75V。
2.7 电源处理部分由于驱鸟系统应用于机场,无法也不允许在机场内随意布线,所以下位机系统的供电模式只能采用自给供电。
在本系统中,采用太阳能光电蓄电池来储蓄电能,供给整个下位机的电源。
3 系统应用上位机按照设定好的无线传输协议向下位机发送命令并读取下位机的反馈信息。
下位机系统初始化之后,更新电源电压、点火电压在数据缓冲区的值,并开始等待下位机的按键输入和命令行匹配。
根据按键输入进行现场点火或上报点火信息;或在串口中断后执行上位机的命令,包括点火、测试通信信道等。
3.1 抗干扰措施在系统初步完成之后,首先进行了打火器打火的测试。
在手动控制和无线控制的情况下,AirTAC阀门的开与关和电打火都能正常完成。
但当把阀门和打火器都装上驱鸟炮之后,单片机却不能正常工作,经常死机,无法控制打火。
经检查发现,打火器的端与煤气室的壁是接触的。
由于打火器是电容式电打火,在打火瞬间会产生很大干扰。
在打火器两端都悬空的时候,下位机电路中的抗干扰措施还能保证单片机正常工作。
当打火器一端与煤气室内壁接触后,打火器两端之间的电容变大,干扰就变得更大,直接导致单片机死机。
通过采取以下的措施,最终使系统达到了稳定。
(1)电打火首先影响的是电源,在电源接入点并入470uF电容,同时在5V和12V供电处串联磁珠。
(2)各个芯片的电源和地之间都并联去耦电容。
(3)优化打火时间。
实验得出0.3秒约可以产生3-5个电火花,保证可靠点火。
(4)加入看门狗软件。
3.2 通信距离的测试机场周边通信距离要求一般在5Km左右,系统选择数传电台JZ875,分别配置棒状天线(10cm)、小吸盘天线(20cm)、大吸盘天线(100cm)3种天线进行了测试。
测试结果表明最长在6千米左右的距离,这个距离已经足够飞机场的使用。
4 结语本文设计的无线驱鸟炮系统实现了由上位机发送指令,控制下位机单个点火、部分点火或全部点火;也可以控制下位机实时点火、延时点火。
同时也可实时采集点火命令的执行结果、煤气气压值、电池电量等信息。
经过在飞机场的实际测试,效果良好。
参考文献[1]郝锡联,易国栋.机场驱鸟方法的探究[J].吉林师范大学学报(自然科学版),2005,02:45-46+52.[2]李功新.输电线路驱鸟器的研制[J].电网技术,2006,03:94-97.[3]宋利民,马宝山,王曰承,李富民,刘世明.16位单片机在机场驱鸟器系统中的应用[J].大连海事大学学报,2006,03:78-80.[4]郑文刚,赵春江,申长军,吴文彪.智能语音驱鸟装置的设计与实现[J].微计算机信息,2009,32:102-103+91.[5]林雪梅,彭佳红,姚志成.单片机多机通信协议的设计[J].微计算机信息,2006年第22 卷,第2-2 期:24-27.。