常用上下位软件通讯详解
Kepserver与ABPLC通讯
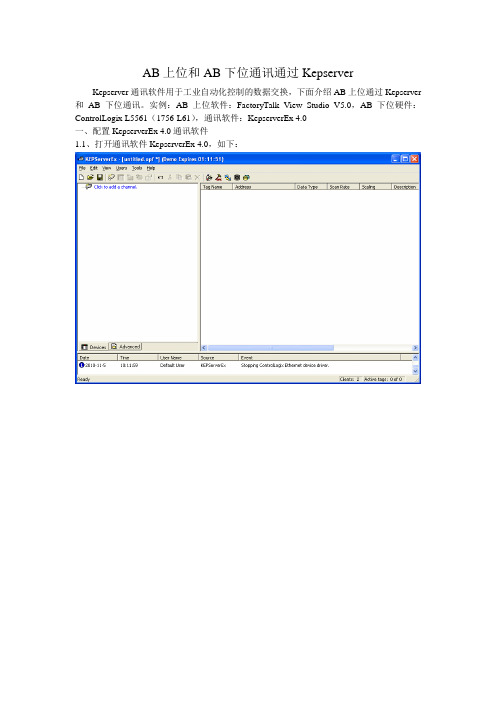
AB上位和AB下位通讯通过KepserverKepserver通讯软件用于工业自动化控制的数据交换,下面介绍AB上位通过Kepserver 和AB下位通讯。
实例:AB上位软件:FactoryTalk View Studio V5.0,AB下位硬件:ControlLogix L5561(1756-L61),通讯软件:KepserverEx 4.0一、配置KepserverEx 4.0通讯软件1.1、打开通讯软件KepserverEx 4.0,如下:1.2、添加Channel,通道名称:Channel11.3、添加设备驱动:ControlLogix Ethernet1.4、选择网络适配器:Default1.5、通道读写优化:默认设置,以下操作默认。
通道配置完成,配置参数如上。
1.6、在通道上添加设备:Device11.7、选择控制器类型:ControlLogix 55001.8、Device ID:100.100.100.10,1,0100.100.100.10:以太网模块地址1:机架0:控制器槽位号格式:255.255.255.255,1,[<Optional Routing Path>],<CPU Slot Or DH+/ControlNet Gateway Path>1.9、以下参数默认1.10、默认数据类型:FloatCOMPACTLOGIX 5370 Protocol Options 选择sy添加设备操作完成。
1.11、添加标签:Click to add a static tag1.12、标签属性Name:中间变量名Address:控制器中变量名标签添加完毕。
四、上位通讯1.13、打开上位软件SE5.0,在应用项目下添加OPC Server-GG,打开属性项:1.14、在OPC Server name下,点击Browse选择KEPware Enhanced OPC/DDE Server,如下:可选择的OPC data server1.15、上位通过OPC server连接Kepserver中变量名,两种方式:建立上位变量名,直接引用Kepserver中变量名。
多台WINCC上位机与一台S7-200系列PLC通过OPC通讯方法
S7-200系列PLC通过OPC与多台WINCC通信
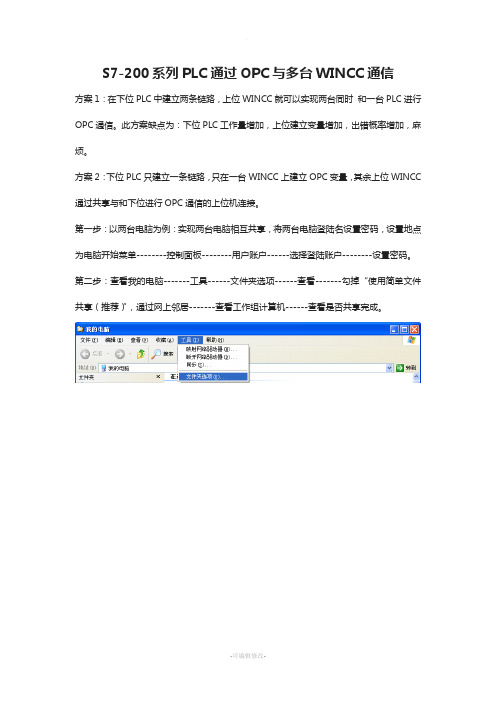
方案1:在下位PLC中建立两条链路,上位WINCC就可以实现两台同时和一台PLC进行OPC通信。
此方案缺点为:下位PLC工作量增加,上位建立变量增加,出错概率增加,麻烦。
方案2:下位PLC只建立一条链路,只在一台WINCC上建立OPC变量,其余上位WINCC 通过共享与和下位进行OPC通信的上位机连接。
第一步:以两台电脑为例:实现两台电脑相互共享,将两台电脑登陆名设置密码,设置地点为电脑开始菜单--------控制面板--------用户账户------选择登陆账户--------设置密码。
第二步:查看我的电脑-------工具------文件夹选项------查看-------勾掉“使用简单文件共享(推荐)”,通过网上邻居-------查看工作组计算机------查看是否共享完成。
第三步:从共享中调用OPC变量
完成。
完整版Kepserver及ABPLC通讯

AB 上位和 AB 下位通信经过KepserverKepserver 通信软件用于工业自动化控制的数据交换,下面介绍AB 上位经过Kepserver 和 AB 下位通信。
实例: AB 上位软件: FactoryTalk View Studio V5.0 , AB 下位硬件:ControlLogix L5561 ( 1756-L61 ),通信软件: KepserverEx 4.0一、配置 KepserverEx 4.0 通信软件、打开通信软件KepserverEx 4.0 ,以下:、增加 Channel,通道名称:Channel1、增加设备驱动:ControlLogix Ethernet、选择网络适配器:Default、通道读写优化:默认设置,以下操作默认。
通道配置达成,配置参数如上。
、在通道上增加设备:Device1、选择控制器种类:ControlLogix 5500、 Device ID :, 1, 0:以太网模块地址1:机架0:控制器槽位号格式: 255.255.255.255,1,[<Optional Routing Path>],<CPU Slot Or DH+/ControlNet Gateway Path>、以下参数默认、默认数据种类:FloatCOMPACTLOGIX 5370Protocol Options选择sy增加设备操作达成。
、增加标签: Click to add a static tag、标签属性Name:中间变量名Address:控制器中变量名标签增加达成。
四、上位通信、打开上位软件,在应用项现在增加OPC Server-GG ,打开属性项:、在 OPC Server name 下,点击 Browse 选择 KEPware Enhanced OPC/DDE Server ,以下:可选择的 OPC data server、上位经过OPC server 连接 Kepserver 中变量名,两种方式:建立上位变量名,直接引用 Kepserver 中变量名。
上位机与下位机之间的通信编程
上位机与下位机之间的通信编程在现代工业自动化系统中,上位机和下位机之间的通信起着至关重要的作用。
上位机是指控制整个系统的计算机,而下位机则是指负责执行具体任务的设备或机器。
通过上位机与下位机之间的通信,上位机可以向下位机发送指令,控制其工作状态,并实时获取下位机的数据反馈。
本文将探讨以上位机与下位机之间的通信编程技术。
1. 通信协议在上位机与下位机之间进行通信时,需要定义一种通信协议,以确保双方能够正确地交换数据。
常用的通信协议包括Modbus、Profibus、CAN等。
这些协议定义了数据的格式、传输方式以及错误处理机制,使得上位机和下位机能够按照统一的规范进行通信。
2. 通信接口上位机与下位机之间的通信可以通过串口、以太网、无线网络等多种方式实现。
在编程时,需要选择合适的通信接口,并根据接口特点进行相应的编程配置。
例如,在使用串口进行通信时,需要配置串口的波特率、数据位、停止位等参数;在使用以太网进行通信时,需要配置IP地址、端口号等参数。
3. 数据交换在通信过程中,上位机和下位机需要交换各种类型的数据,如控制指令、传感器数据、报警信息等。
为了确保数据的准确性和可靠性,通常会使用特定的数据格式进行数据交换。
常见的数据格式包括二进制、ASCII码、JSON等。
在编程时,需要根据数据格式的要求进行数据的打包和解包操作。
4. 通信流程通信流程是指上位机与下位机之间通信的具体步骤和顺序。
在通信编程中,需要明确通信流程,确保上位机和下位机能够按照预定的顺序进行通信。
通常,通信流程包括建立连接、数据交换、关闭连接等步骤。
5. 异常处理在通信过程中,可能会出现各种异常情况,如通信超时、通信中断、数据错误等。
为了保证通信的稳定性和可靠性,需要在编程时对这些异常情况进行处理。
常见的异常处理方式包括重新连接、重发数据、错误提示等。
6. 安全性在工业自动化系统中,数据的安全性至关重要。
为了保护通信过程中的数据安全,需要在通信编程中加入相应的安全机制。
上位机、下位机通信实例
上位机、下位机通信实例摘要:1.上位机与下位机通信的基本概念2.上位机与下位机通信的方式3.通信实例介绍4.通信实例的应用场景5.通信实例的优势与不足正文:一、上位机与下位机通信的基本概念上位机和下位机通信是指在计算机控制系统中,上位机(通常为控制中心或主计算机)与下位机(通常为现场控制器或执行器)之间的信息交换。
上位机主要负责数据处理、逻辑控制和决策等任务,而下位机则主要负责现场设备的运行控制。
两者之间的通信是实现自动化控制系统正常运行的关键。
二、上位机与下位机通信的方式上位机与下位机之间的通信方式主要有串行通信、并行通信和网络通信等。
其中,串行通信和并行通信是硬件层面的通信方式,而网络通信则是基于计算机网络的通信方式。
1.串行通信:串行通信是指上位机与下位机之间通过串行接口进行数据传输。
它具有线路简单、成本低的优点,但传输速率相对较低。
2.并行通信:并行通信是指上位机与下位机之间通过并行接口进行数据传输。
它具有传输速率快的优点,但需要较多的线路和硬件资源。
3.网络通信:网络通信是指上位机与下位机之间通过网络进行数据传输。
它可以实现远程控制和实时数据交互,但需要建立稳定的网络环境和较高的网络带宽。
三、通信实例介绍以下是一个典型的上位机与下位机通信实例:假设有一个自动化生产线系统,上位机负责生产任务的分配和调度,下位机负责具体的设备运行控制。
在这个系统中,上位机需要实时获取下位机的运行状态和数据,并根据生产任务进行调整。
同时,下位机也需要根据上位机的指令来执行相应的操作。
四、通信实例的应用场景上位机与下位机通信实例在许多领域都有应用,如工业自动化、楼宇自控、智能交通等。
在这些领域中,上位机与下位机通信实例可以实现设备的远程监控、实时数据采集和智能决策等功能,从而提高系统的运行效率和可靠性。
五、通信实例的优势与不足上位机与下位机通信实例具有以下优势:1.提高系统的自动化水平,降低人工干预成本。
2.实现远程监控和控制,方便管理人员进行决策。
常用通信工具(QQ,微博,微信)主要功能操作手册

常用通信工具主要功能操作手册常用通信工具主要功能操作手册目录电脑版QQ (3)下载QQ软件安装: (3)申请QQ号: (4)登陆使用QQ (4)以下介绍,常用功能: (5)查找添加QQ好友 (6)发送即时消息 (9)手机版QQ (12)下载手机版QQ软件安装: (12)申请QQ号: (13)登陆使用QQ (13)电脑版新浪微博 (14)注册微博账号 (14)登录发布微博 (14)手机版新浪微博 (17)登陆 (17)微信 (19)下载 (19)登录使用 (19)电脑版QQ腾讯QQ是深圳市腾讯计算机系统有限公司开发的一款基于Internet的即时通信(IM)软件。
最高在线用户:167,383,825下载QQ软件安装:复制以网址(http://dl_/qqfile/qq/QQ2012/QQ2012Beta2.exe)至IE地址栏中,回车,出现如下界面,点击<运行>图1.下载点击<下一步>,至<完成>,如下图。
图2.完成安装完成后,通常桌面出现:图标。
申请QQ号:(已经申请号:2572896650,密码:,可使用。
)也可以点击/chs/index.html重新申请。
登陆使用QQ1.已经申请QQ号,且安装好QQ软件,点击桌面,出现,如下登陆窗口。
图3.登陆输入申请的QQ号(2572896650)和密码,点击<登录>,成功后出现,如下图。
图4.主界面进入此界面,表示已经可以使用QQ了。
以下介绍,常用功能:查找添加QQ好友新号码首次登录时,好友名单是空的,要和其它人联系,必须先要添加好友。
成功查找添加好友后,你就可以体验QQ的各种特色功能了。
第一步:先点击主面板右下角查找按钮;图5.主界面,各人界面内容不一样第二步:好友查找分为精确查找与按条件查找,可以根据实际情况进行选择;图6.查找联系人第三步:找到好友之后选择添加好友,将好友存放到设立的分组中;图7.添加好友图8.添加好友点击如上图<下一步>图9.添加好友完成点击如上图<完成>第四步:添加成功在好友分组中查看好友。
上下位机通信方法
上下位机通信方法
上下位机通信是指在自动化控制系统中,上位机和下位机之间进行数据交换和通信的方式和方法。
常见的上下位机通信方法有以下几种:
1. 串口通信:使用串行通信接口(如RS232、RS485等)实现上下位机之间的数据传输。
这种通信方法简单易实现,但传输速度相对较慢。
2. 网口通信:利用以太网接口进行通信,可以使用TCP/IP协议或UDP协议进行数据传输。
网口通信速度较快,适用于大数据量或实时性要求较高的场景。
3. USB通信:通过USB接口进行数据传输和通信。
USB通信的优点是便携性强,适用于移动设备或一体机等场景。
4. 无线通信:利用无线模块(如蓝牙、Wi-Fi、ZigBee等)实现上下位机之间的通信。
无线通信可以实现远程控制和监测,但受环境影响较大,通信稳定性相对较差。
5. CAN总线通信:针对工控领域的通信协议,主要用于机器人、工业自动化等领域。
CAN总线通信速度快,可实现多节点通信,适用于复杂系统中的设备间通信。
6. MQTT通信:一种轻量级的消息发布/订阅协议,适用于物联网设备之间的通信。
MQTT通信具有低带宽和开销、可靠
性强、支持海量设备等优点。
在实际应用中,选择哪种上下位机通信方法,需要根据具体的应用场景和要求进行选择和配置。
组态软件和下位设备的通信

组态软件和下位设备的通信
在监控工程中,正确和快速地采集工业现场中的过程数据并能对它们进行操作控制是系统的关键。
这是组态软件的设备通信的内容。
组态软件与设备通信,又称“IO通信”,是指组态软件的工程和PLC、智能模块、板卡、智能仪表、变频器、伺服控制器等硬件设备进行数据交互的功能。
组态软件IO通信的对象俗称为“下位设备”。
运行组态软件的计算机俗称“上位机”。
组态软件的设备通信一般是通过串口、以太网或其它网卡等接口经通信电缆连接到硬件设备进行的。
串口根据距离的远近和一根通信电缆上连接的设备数量可以是RS232、RS422和RS485。
也可以是组态软件直接读写插入和组态软件同机的IO板卡,经过USB端口扩展外接的一些IO板卡,还可以间接地通过第三方软件,如OPC Server和设备交换数据。
在一个工程中可以同时和多种不同类型的设备进行通信,如可以同时有不同厂家的PLC 、仪表、智能模块和板卡。
在一根485通信线上可以连接多台设备。
组态软件实现并隐藏了和硬件设备的通信细节。
例如:用户不需要关心通信协议以及协议的实现,只需知道设备的类型,是什么厂家和类型的硬件,它们如何和上位机连接、基本的连接参数以及通信的内容等就可以建立和设备的通信。
组态软件提供IO通信的“向导”
功能来指导用户完成IO通信的所有配置工作。
用户可以设置当通信出现故障时的处理办法,可以动态停止和启动和某些设备的通信。
factorytalkview下位通讯
factorytalkview下位通讯FactoryTalk View是一种可视化软件,用于监控和控制工业自动化系统。
它提供了一个用户友好的界面,使操作人员能够实时监测和控制工厂的运行情况。
下位通讯是FactoryTalk View的一个重要功能,它允许软件与下位设备进行通信,例如PLC(可编程逻辑控制器)或DCS(分布式控制系统)。
通过下位通讯,FactoryTalk View可以读取和写入下位设备的数据,实现与工厂设备的连接。
FactoryTalk View下位通讯的实现基于OPC(开放式过程控制)技术。
OPC是一种工业标准协议,用于实现不同设备之间的数据通信。
FactoryTalk View通过OPC服务器与下位设备进行通信,读取和写入数据。
使用FactoryTalk View的下位通讯功能,操作人员可以轻松监测和控制工厂设备的状态。
他们可以实时查看设备的运行数据,例如温度、压力、流量等。
如果设备出现故障或异常,他们可以立即采取措施进行修复或调整。
FactoryTalk View下位通讯的优势在于其高度可定制性和灵活性。
它支持多种通信协议,包括Ethernet/IP、Modbus、Profibus等,可以与不同厂家的设备进行通信。
此外,FactoryTalk View还提供了丰富的图形化界面和操作控件,使操作人员能够轻松创建自定义的监控界面。
下位通讯对于工业自动化系统的运行和管理至关重要。
它使工厂能够实现实时监测和控制,提高生产效率和质量。
通过与FactoryTalk View的结合,下位通讯变得更加简单和可靠。
FactoryTalk View下位通讯是一种强大而灵活的工业自动化软件功能。
它使工厂能够实现实时监测和控制,提高生产效率和质量。
通过与不同厂家的设备进行通信,FactoryTalk View的下位通讯功能为工业自动化系统的运行和管理提供了重要的支持。
无论是监控设备状态还是实时调整参数,FactoryTalk View下位通讯都能帮助操作人员更好地管理工厂设备。
c#通过串口及CAN模块实现上位及下位机通讯
c#通过串⼝及CAN模块实现上位及下位机通讯⽬录前⾔⼀、串⼝、CAN总线⼆、使⽤步骤1.RS232串⼝通讯(指令下发与接收)2.CAN总线通讯总结前⾔学习及⼯作中我们经常会遇到上位机与下位机通讯等⼯作,结合场景使⽤不同的通讯⽅式实时通讯,以下为⼯作中遇到的上位机与下位机进⾏实时通讯,采⽤RS232串⼝和CAN总线形式进⾏⽹络通讯。
⼀、串⼝、CAN总线串⾏接⼝简称串⼝,也称串⾏通讯接⼝或串⾏通讯接⼝(通常指设备的COM接⼝),是采⽤串⾏通信⽅式的扩展接⼝。
串⾏接⼝(Serial Interface)是指数据⼀位⼀位地顺序传送。
其特点是通讯简单,只要⼀对传输线,通过设备设置传输线端⼝等参数就可以实现双向通信,从⽽⼤⼤降低了成本,特别适⽤于远距离通信,但传送速度较慢。
CAN是控制器局域⽹络(Controller Area Network, CAN)的简称,是由以研发和⽣产汽车电⼦产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO 11898),是国际上应⽤最⼴泛的现场总线之⼀。
在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌⼊式⼯业控制局域⽹的标准总线,并且拥有以CAN为底层协议专为⼤型货车和重⼯机械车辆设计的J1939协议。
上位机与与下位机制定好通⽤协议通过CAN模块将数据进⾏16进制转换实时通讯。
⼆、使⽤步骤1.RS232串⼝通讯(指令下发与接收)代码如下(⽰例)://命名空间引⼊using System.IO.Ports;public SerialPort serialPort;//定义串⼝对象类public//定义连接⽅法public void Connect(){serialPort = new SerialPort();serialPort.BaudRate = 1200;//波特率serialPort.PortName = "COM1";serialPort.Parity = Parity.None;//校验法:⽆serialPort.DataBits = 8;//数据位:8serialPort.StopBits = StopBits.One;//停⽌位:1try{serialPort.Open();//打开串⼝serialPort.DtrEnable = true;//设置DTR为⾼电平serialPort.RtsEnable = true;//设置RTS位⾼电平serialPort.DataReceived += new SerialDataReceivedEventHandler(serialPort_DataReceived);//DataReceived事件委托byte[] WriteBuffer = Encoding.ASCII.GetBytes("下发指令");//下发serialPort.Write(WriteBuffer, 0, WriteBuffer.Length);}catch (Exception ex){//打开串⼝出错,显⽰错误信息Console.WriteLine("串⼝打开失败");}}2.CAN总线通讯代码如下(⽰例)://⾸先与CAN模块进⾏连接public TcpClient mTcp = new TcpClient();private const int READ_BUFFER_SIZE = 1000;private byte[] readBuffer = new byte[READ_BUFFER_SIZE + 1];public delegate void DoReadEventHandle(object sender, string e);public event DoReadEventHandle ReadedEvent;public event DoReadEventHandle LogEvent;public string recStr { get; set; }public string HandString { get; set; }public bool Connect(){//Can模块ipstring mIPAddress = "192.168.1.1";IPAddress hostIPAddress = IPAddress.Parse(mIPAddress);//端⼝int mPort = 8080;IPEndPoint endIP = new IPEndPoint(hostIPAddress, mPort);try{mTcp = new TcpClient(mIPAddress, mPort);DateTime Savetime = DateTime.Now;TimeSpan n = new TimeSpan();while (true){n = DateTime.Now - Savetime;if (n.TotalMilliseconds > 1000 || mTcp.Client.Connected) break;}if (!mTcp.Client.Connected) return false;mTcp.GetStream().BeginRead(readBuffer, 0, READ_BUFFER_SIZE, DoRead, null);}catch (Exception){return false;}return true;}private void DoRead(IAsyncResult ar){try{int BytesRead = mTcp.GetStream().EndRead(ar);if (BytesRead > 0){string s = "";for (int i = 0; i <= BytesRead - 1; i++){s = s + string.Format("{0:x2}", readBuffer[i]) + " ";}Console.WriteLine(s);var t = s.Split(new string[] { "aa 00 ff 00 00 00 00 00 00 00 00 00 55" }, StringSplitOptions.RemoveEmptyEntries).FirstOrDefault(ex => ex != " ");if (!string.IsNullOrEmpty(t)){recStr += t + "\r\n";if (HandString == recStr && LogEvent != null){HandString = null;LogEvent(this, "握⼿成功!");}} mTcp.GetStream().BeginRead(readBuffer, 0, READ_BUFFER_SIZE, DoRead, null);}}catch (Exception e){mTcp.Client.Close();}}//数据发送public void sendCan(string temperature, bool check){HandString = "0xC0 0x02 0x02 0x00 0x00";string[] tmp = temperature.Split(' ');var buf = new byte[22];for (int i = 0; i < buf.Length; i++){buf[i] = 0;}for (int i = 0; i < tmp.Length; i++){try{buf[i] = Convert.ToByte(tmp[i], 16);}catch (Exception e){buf[i] = 0;}}SendData(buf, 0, 13, check);}public bool SendData(byte[] sendBytes, int mStart, int mLen, bool check = true) {if (!check) return false;try{lock (mTcp.GetStream()){mTcp.GetStream().Write(sendBytes, mStart, mLen);}return true;}catch (Exception x){return false;}}总结1、RS232串⼝通讯接⼝的信号电平值较⾼,易损坏接⼝电路的芯⽚,传输速率较低,传输距离有限。
上位机和下位机的通讯协议
上位机和下位机的通讯协议是指在工业自动化等领域中,上位机(如计算机)与下位机(如PLC、传感器、执行器等控制设备)之间进行数据交换和通信所使用的协议。
常见的上位机和下位机通讯协议有以下几种:1. Modbus协议:- Modbus是一种串行通信协议,广泛应用于工业自动化领域。
-它定义了上位机与下位机之间的通信规范和数据格式,支持多种物理介质,如串口和以太网。
2. Profibus协议:- Profibus是一种广泛使用的工业现场总线协议。
-它兼容多种数据传输方式,包括串行通信和以太网,可实现上位机与下位机之间的实时数据传输和远程控制。
3. CAN(Controller Area Network)协议:- CAN是一种主要用于车载通信和工业控制系统的通信协议。
-它提供高可靠性、实时性和抗干扰能力,适用于需要快速和可靠数据传输的环境。
4. OPC(OLE for Process Control)协议:- OPC是一种开放标准的数据传输协议,用于连接上位机和下位机之间的数据通信。
-它允许不同厂家的设备和软件能够互相通信,实现数据采集、监控和控制功能。
5. Ethernet/IP协议:- Ethernet/IP是在以太网上运行的工业自动化通信协议。
-它基于TCP/IP协议栈,并使用标准以太网进行数据传输,实现上位机与下位机之间的实时数据交换和远程控制。
需要根据具体应用场景和设备要求选择合适的通讯协议。
在设计和实施通讯系统时,应确保上位机和下位机之间的通信协议相容性,同时考虑数据传输的速度、稳定性和安全性等方面的要求。
[备注:以上列举的通讯协议仅为常见示例,实际应用中可能涉及更多的协议类型和标准。
在具体项目中,请参考相关标准和设备提供商的文档,并咨询专业人士的建议。
]。
S7400与常用上下位软件通讯
15
SIMATIC S7
SIMATIC S7-400 与 InTouch V9.0 通讯
07.接下来点击菜单 开始 Station Configurator,运行Station Configurator Editor , 用鼠标点选对话框中的列表,右键添加对象,依照Step7中PC站的配置情况, 分别添加Application,IE General,OPC Server(可选)。其中在添加 IE General 时选择ISO Ind. Ethernet <本机网卡绑定>。
10
SIMATIC S7
SIMATIC S7-400 与 WinCC V6.0 通讯
10. 用鼠标点选项目圆,双击鼠标左键 就会打开对象属性对话框,我们建立 一个简单的颜色属性。鼠标左键选择 对象颜色属性,然后在右侧的窗口中, 点选北京颜色,再右键点击动态列的 灯,在弹出的菜单中选择动态对话框 选项,填写内容完成对象与变量的连 接。
03.点击桌面 件;
2
SIMATIC S7
SIMATIC S7-400 与 Step7 V5.3 通讯
04.建立一个新项目或打开一个已经存 在的项目(这里以打开一个已存在项目 为例);
05.在打开的项目中,选择View菜单,点选online子项进入在线界面,如左下图。
3
SIMATIC S7
SIMATIC S7-400 与 Step7 V5.3 通讯
SIMATIC S7
SIMATIC S7-400 与 常用上下位软件通讯
1
SIMATIC S7
SIMATIC S7-400 与 Step7 V5.3 通讯
前提:本例在安装有以下软件的PC机上实现通讯。 1.SIMATIC NET V6.0+SP2; 2.SIMATIC Step7 V5.3; 实现步骤: 01.依次点击菜单:开始 SIMATIC SIMATIC NET Settings Set PG-PC Interface 启动PG-PC接口设定界面; 02.在Access Point of the Application项 中选择S7ONLINE (STEP7) TCP/IP <本机网卡绑定> 图标,启动Step7软
到上位机的通讯协议
到上位机的通讯协议
上位机与下位机之间的通讯协议通常是通过串行通讯或者网络
通讯进行的。
串行通讯协议包括常见的RS-232、RS-485、Modbus等,而网络通讯协议则包括TCP/IP、UDP、HTTP等。
这些通讯协议在工
业控制、自动化领域中被广泛应用。
在串行通讯中,RS-232是一种较为常见的标准,它定义了串行
通讯的物理接口和信号规范。
RS-485则是一种多点通讯的标准,适
用于远距离通讯和多节点通讯。
Modbus是一种常见的工业领域通讯
协议,包括Modbus RTU和Modbus TCP两种形式,用于在工业控制
系统中传输数据。
在网络通讯中,TCP/IP协议是互联网和局域网中最常见的协议
之一,它提供了可靠的、面向连接的数据传输。
UDP协议则是一种
无连接的通讯协议,适用于实时性要求较高的数据传输。
HTTP协议
是超文本传输协议,用于在客户端和服务器之间传输超文本。
除了上述常见的通讯协议外,还有许多其他的通讯协议,如
CAN总线、Ethernet、Profibus等,它们在不同的应用场景中发挥
着重要作用。
总的来说,不同的通讯协议适用于不同的应用场景和需求,选择合适的通讯协议对于建立可靠的上位机与下位机通讯至关重要。
上位机和下位机通信
上位机和下位机通信
简介
在嵌入式系统中,我们经常需要将上位机和下位机进行通信。
上位机可以是
PC机、嵌入式开发板等,下位机可以是单片机、FPGA、DSP等。
本文将介绍上位
机和下位机通信的一般流程和具体实现方法。
通信流程
上位机和下位机之间的通信一般分为以下几个步骤:
1.建立连接:上位机通过串口、USB、以太网等方式建立与下位机的物
理连接。
2.协议定义:双方需要定义好通信协议,即数据格式和通信规则。
3.数据传输:上位机向下位机发送数据,下位机接收数据并进行处理,
然后向上位机返回数据。
4.断开连接:通信结束后,双方需要关闭物理连接。
具体的通信流程如下图所示:
graph LR
A(建立连接) --> B(协议定义)
B --> C(数据传输)
C --> D(断开连接)
常见的通信协议
在上位机和下位机之间通信时,需要定义好数据格式和通信规则,即通信协议。
常见的通信协议有以下几种:
1. ASCII码协议
ASCII码协议是一种文本协议,数据使用ASCII码表示,每个数据项使用特定
的分隔符分开。
这种协议实现简单,但数据量大,传输速度较慢。
常用于调试和测试。
例如,上位机向下位机发送。
上位机、下位机通信实例

上位机、下位机通信实例【原创版】目录1.上位机与下位机通信的概念与原理2.上位机与下位机通信的实例分析3.上位机与下位机通信的发展趋势和应用前景正文一、上位机与下位机通信的概念与原理上位机和下位机通信是指在计算机控制系统中,上位机(如 PC 机、工控机等)与下位机(如 PLC、PAC 等)之间的数据通信。
这种通信方式在工业自动化、过程控制等领域有着广泛的应用。
上位机主要负责数据处理、信息管理和人机交互等功能,而下位机主要负责现场设备运行控制和数据采集。
两者之间的通信是实现控制系统正常运行的关键。
通信原理主要基于 RS-232、RS-485、以太网等通信协议。
其中,RS-232 是一种串行通信协议,主要适用于短距离通信;RS-485 是一种串行通信协议,具有较强的抗干扰能力,适用于长距离通信;以太网是一种局域网通信协议,具有传输速度快、通信距离远等特点,适用于大型控制系统。
二、上位机与下位机通信的实例分析1.基于 RS-232 的通信实例假设有一个简单的控制系统,上位机为 PC 机,下位机为 PLC。
在这种情况下,PC 机需要通过 RS-232 协议与 PLC 进行通信。
通信过程如下:(1)PC 机发送数据:PC 机将需要控制的设备参数(如速度、温度等)通过 RS-232 协议打包成数据帧,发送给 PLC。
(2)PLC 接收数据:PLC 接收到数据帧后,对数据进行解包,提取出设备参数,并根据这些参数控制现场设备运行。
(3)PLC 发送数据:当现场设备运行状态发生变化时,PLC 将这些变化信息打包成数据帧,发送给 PC 机。
(4)PC 机接收数据:PC 机接收到数据帧后,对数据进行解包,提取出设备运行状态信息,并在人机界面上进行显示。
2.基于 RS-485 的通信实例假设有一个中型控制系统,上位机为工控机,下位机为 PAC。
在这种情况下,工控机需要通过 RS-485 协议与 PAC 进行通信。
通信过程如下:(1)工控机发送数据:工控机将需要控制的设备参数(如流量、压力等)通过 RS-485 协议打包成数据帧,发送给 PAC。
PC通过Kepserver与ABPLC通讯
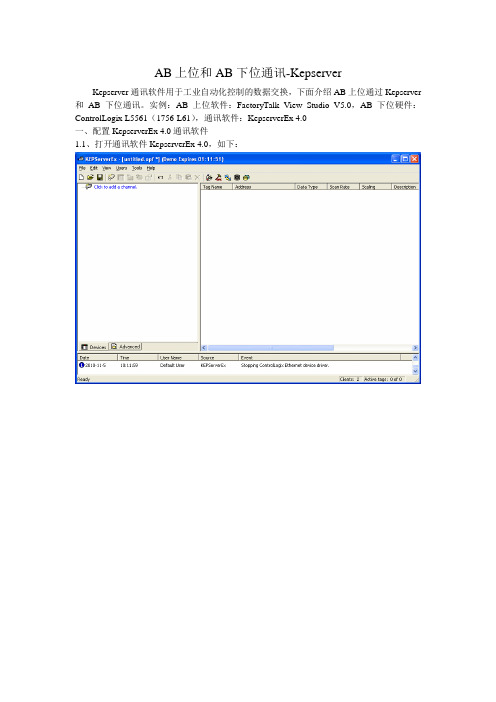
AB上位和AB下位通讯-KepserverKepserver通讯软件用于工业自动化控制的数据交换,下面介绍AB上位通过Kepserver 和AB下位通讯。
实例:AB上位软件:FactoryTalk View Studio V5.0,AB下位硬件:ControlLogix L5561(1756-L61),通讯软件:KepserverEx 4.0一、配置KepserverEx 4.0通讯软件1.1、打开通讯软件KepserverEx 4.0,如下:1.2、添加Channel,通道名称:Channel1 1.3、添加设备驱动:ControlLogix Ethernet1.4、选择网络适配器:Default1.5、通道读写优化:默认设置,以下操作默认。
通道配置完成,配置参数如上。
1.6、在通道上添加设备:Device11.7、选择控制器类型:ControlLogix 55001.8、Device ID:100.100.100.10,1,0100.100.100.10:以太网模块地址1:机架0:控制器槽位号格式:255.255.255.255,1,[<Optional Routing Path>],<CPU Slot Or DH+/ControlNet Gateway Path>1.9、以下参数默认1.10、默认数据类型:FloatCOMPACTLOGIX 5370 Protocol Options 选择sy添加设备操作完成。
1.11、添加标签:Click to add a static tag1.12、标签属性Name:中间变量名Address:控制器中变量名标签添加完毕。
四、上位通讯1.13、打开上位软件SE5.0,在应用项目下添加OPC Server-GG,打开属性项:1.14、在OPC Server name下,点击Browse选择KEPware Enhanced OPC/DDE Server,如下:可选择的OPC data server1.15、上位通过OPC server连接Kepserver中变量名,两种方式:建立上位变量名,直接引用Kepserver中变量名。
上位机、下位机通信实例 -回复

上位机、下位机通信实例-回复如何进行上位机和下位机的通信。
文章旨在帮助读者了解上位机和下位机通信的基本原理、通信协议和实际应用案例。
第一步:了解上位机和下位机的概念上位机和下位机是指在计算机系统或者自动化控制系统中,按照功能划分的两个层次。
上位机通常负责数据处理、图形界面和用户交互操作,而下位机则负责具体的硬件控制和数据采集。
在一个典型的自动化系统中,上位机负责设置参数、监控设备状态、采集数据并进行分析,在需要时可以向下位机发送指令以实现设备的控制。
而下位机则负责将传感器采集到的数据传输给上位机,并根据上位机发送的指令控制相应的设备。
第二步:了解上位机和下位机的通信原理上位机和下位机之间的通信原理可以通过串口通信、以太网通信、无线通信等方式实现。
串口通信是一种常见的上位机和下位机通信方式。
通常使用RS232、RS485等接口标准进行连接,并通过串口通信协议进行数据传输。
一般情况下,上位机通过发送特定的命令或者数据格式给下位机,下位机则解析数据进行相应的操作,并将结果反馈给上位机。
以太网通信是另一种常用的上位机和下位机通信方式。
通过以太网接口连接上位机和下位机,并使用TCP/IP或者UDP等协议进行数据传输。
上位机和下位机可以使用自己定义的通信协议进行数据交互,也可以使用应用层协议如Modbus、OPC等。
无线通信是近年来的新兴通信方式,基于无线局域网(WLAN)、蓝牙(Bluetooth)等技术,上位机和下位机可以通过无线连接进行数据传输。
无线通信可以提供更大的灵活性和便捷性,适用于一些需要移动或者远程控制的应用场景。
第三步:了解上位机和下位机通信协议通信协议是上位机和下位机进行数据交互的规定,它定义了数据的格式、传输方式、错误检查等规则,确保数据正确地传输并被正确解析。
常用的通信协议有以下几种:1. Modbus:是一种开放的应用层通信协议,广泛用于工业自动化领域。
Modbus主要定义了数据的传输格式、数据读取和写入的指令等。
上位机、下位机通信实例

上位机、下位机通信实例上位机和下位机通信实例是指在某个系统中,上位机和下位机之间通过网络或串口等通信方式进行数据交互的实践案例。
上位机一般指控制系统的主机,负责运行程序、协调各个组件的工作,而下位机通常是控制系统中的从属设备,负责执行上位机指令或者采集数据等工作。
下面将分步骤回答关于上位机和下位机通信实例的问题。
第一步:确定通信协议和通信方式上位机和下位机通信的第一步是确定通信协议和通信方式。
通信协议是上位机和下位机之间进行通信时使用的数据格式、命令规范等约定,例如Modbus、CAN、TCP/IP等。
通信方式则是确定通信介质和传输方式,例如串口通信、以太网通信等。
第二步:建立物理连接根据通信方式的不同,需要在上位机和下位机之间建立物理连接。
如果是通过串口通信,需要使用串口线缆将上位机和下位机连接起来;如果是通过以太网通信,需要将上位机和下位机连接到同一个局域网上。
第三步:实现通信协议上位机和下位机之间的通信需要遵循特定的通信协议。
在这一步中,需要编写上位机和下位机的通信程序,实现协议中定义的数据格式、命令规范等。
例如,如果采用Modbus协议,上位机需要发送Modbus命令给下位机,下位机根据命令执行相应的操作,并返回结果给上位机。
第四步:数据传输和处理一旦通信协议实现并建立好连接,上位机和下位机之间就可以进行数据传输和处理。
上位机可以向下位机发送指令,下位机根据指令执行相应的操作,并将执行结果返回给上位机。
上位机可以对返回的数据进行分析和处理,例如显示在界面上、保存到数据库中等。
第五步:错误处理和异常处理在通信实例中,错误处理和异常处理是十分重要的部分。
在通信过程中,可能出现通信中断、数据损坏等问题。
因此,设计良好的错误处理和异常处理机制是必要的。
例如,在通信中断时,可以建立断线重连机制;在数据损坏时,可以进行数据校验和重传。
第六步:实时性要求通信实例中,实时性往往是一个重要的指标。
上位机和下位机之间的通信需要满足一定的实时性要求,以确保系统的稳定性和响应性。
上下位机软硬件介绍及分析处理PPT课件
公司搅拌站上采用的是研祥公司工控机1711主板接口示意图:
简介
5
返回
简介
第一代工控机主要硬件配置为: 奔4 1.7G 处理器;40G迈拓或三星硬盘;256M内存;128M独立 显卡;FSC-1711VNA型主板;IPC6114P4A或IPC-6113LP4底板 ;PS-7270B ATX电源;810B-SY1机箱;MOXA通讯卡;双飞燕 鼠标和键盘。
3.4 PCIpnp 3.4.1 设置中断方式
3.5 boot 3.5.1 快速启动,可以设置是否快速启动。
14
CMOS设置
3.5.2 设置是否显示OEM LOGO内容 3.5.3 配置系统出错后是否提示按F1 3.5.4 配置系统启动时,启动设备的优先权。
3.6 security 3.6.1 设置和改变用户的密码。
21
故障处理
(五)故障处理
一、故障处理的八先八后
1、先调查后熟悉:先根据现场情况分析考虑问题可能出在哪儿,然后再动手操作; 2、先清洁后检修:实践表明,许多故障都是由脏污而引起的,清洁后故障往往会自动
排除; 3、先机外后机内:首先检查计算机外部电源﹑设备﹑线路,然后再开机箱检查; 4、先机械后电气:分清是机械原因引起的,还是由电气毛病造成的; 5、先软件后硬件:先从判断软件入手,然后再从硬件着手; 6、先电源后机器:电源是电脑的动力所在,许多故障往往就是由电源故障而引起的; 7、先通病后特殊:先排除带有普遍性和规律性的常见故障,然后再检查特殊的故障; 8、先外围后内部:首先检查其外围电路,在确认外围电路正常时,再考虑更换重要元
第二代工控机主要软件配置为: 软件方面为windows2000中、英文操作系统,SQLSEVER数据库 ,自主开发的监控程序和数据管理系统。
霍尼韦尔上位画面与下位通讯协议
霍尼韦尔上位画面与下位通讯协议协议模板:霍尼韦尔上位画面与下位通讯协议1. 目的本协议旨在规定和细化霍尼韦尔上位画面与下位通讯之间的规范和约束。
2. 范围本协议适用于所有涉及霍尼韦尔上位画面与下位通讯的项目和合作关系。
3. 定义上位画面指霍尼韦尔控制系统中提供操作界面的软件应用,用于人机交互。
下位通讯指霍尼韦尔控制系统与下位设备之间进行数据传输和通讯的过程。
4. 协议内容数据传输方式•双向通讯:上位画面与下位设备之间的通讯应支持双向数据传输,确保实时性和准确性。
•数据加密:所有传输的数据应通过合适的加密算法进行加密,以确保数据的安全性。
通讯协议•选择合适的通讯协议:上位画面与下位设备之间的通讯协议应根据具体需求选择,例如MODBUS、OPC等。
•协议兼容性:通讯协议应具备良好的兼容性,以便能够与不同品牌、不同型号的设备进行通讯。
网络通讯设置•IP地址和端口号设置:上位画面和下位设备之间的网络通讯应设定合适的IP地址和端口号,确保可靠性和稳定性。
•网络安全设置:应采取合适的网络安全措施,如防火墙、访问权限控制等,保护系统免受未授权访问和攻击。
异常处理•异常情况通知:在通讯过程中,如出现数据丢失、通讯中断等异常情况,应设定相应的报警和通知机制,及时通知相关人员并采取适当的处理措施。
•异常恢复机制:在异常情况恢复后,应确保数据的完整性和准确性,同时进行相应的日志记录和数据恢复。
5. 协议修订和生效修订•协议的修订应由相关负责人提出,并经过讨论和评审后进行修改。
•修订后的协议应及时通知所有相关方,并以统一的形式进行存档和管理。
生效•本协议自最终签署之日起生效。
•本协议的生效不代表上位画面和下位设备之间的通讯即刻开启,具体通讯的开启时间应根据项目进度和相关安排确定。
以上为《霍尼韦尔上位画面与下位通讯协议》的协议模板。
请根据具体情况和需求进行修改和补充,确保协议的严谨性和可操作性。
6. 责任和义务上位画面•上位画面的开发方负责按照协议规定的通讯要求,提供稳定可靠的通讯接口和相关功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
02.在Access Point of the Application项 中选择S7ONLINE (STEP7) TCP/IP <本机网卡绑定>
04.建立一个新项目或打开一个已经存在的项目(这里以打开一个已存在项目为 例),在打开的项目中插入一个SIMATIC PC Station 对象。
05.展开 SIMATIC PC Station 对象,用鼠标双击窗口右侧的Configuration,对 新添加的PC站进行组态。
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
8
SIMATIC S7
SIMATIC S7-400 与 WinCC V6.0 通讯
08.结下来用鼠标左键点击建立好的连接,用鼠标右键点 击窗口右侧区域,先则新建变量,会打开变量属性对话 框,依次给新建变量起名字,选取数据类型,在地址项, 点击选择按钮,继续打开地址属性对话框,填写内容完 成变量的建立。
2
SIMATIC S7
SIMATIC S7-400 与 Step7 V5.3 通讯
04.建立一个新项目或打开一个已经存 在的项目(这里以打开一个已存在项目 为例);
05.在打开的项目中,选择View菜单,点选online子项进入在线界面,如左下图。
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
07.接下来点击菜单 开始Station Configurator,运行Station Configurator Editor , 用鼠标点选对话框中的列表,右键添加对象,依照Step7中PC站的配置情况, 分别添加Application,IE General,OPC Server(可选)。其中在添加 IE General 时选择ISO Ind. Ethernet <本机网卡绑定>。
6
SIMATIC S7
SIMATIC S7-400 与 WinCC V6.0 通讯
06.在变量管理器中展开新添加的驱动程序,用鼠标左键点击TCP/IP项,单击 鼠标右键选择新建连接,为建立的连接起名,打开连接属性会出现如下右的连 接参数窗口,在这里填写S7400站的IP地址,并输入机架号和插槽号。
17
SIMATIC S7
SIMATIC S7-400 与 InTouch V9.0 通讯
09.在打开的对话框中,连接伙伴选择要连接 的CPU,这里我们选择S7400站的CPU4162DP,连接类型选择S7 connection。这样就建 立了PC站应用程序和S7400站CPU的通讯连 接。继续选择菜单PLCDownload to Current Project Selected Station分别对S7400站和PC 站传送程序。
SIMATIC S7
SIMATIC S7-400 与 常用上下位软件通讯
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
1
SIMAቤተ መጻሕፍቲ ባይዱIC S7
03.点击桌面 软件;
图标,启动WinCC
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
5
SIMATIC S7
SIMATIC S7-400 与 WinCC V6.0 通讯
14
SIMATIC S7
SIMATIC S7-400 与 InTouch V9.0 通讯
06.在打开的HW Config窗口中,配置PC站,分别添加Application,IE General, OPC Server(可选)。其中在添加 IE General 时选择S7 项目中已组态的以太网, IP Address 填写本机地址,特别注意subnet mask 设置要与项目配置一样。
03.点击桌面 件;
图标,启动Step7软
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
13
SIMATIC S7
SIMATIC S7-400 与 InTouch V9.0 通讯
3
SIMATIC S7
SIMATIC S7-400 与 Step7 V5.3 通讯
06.监视程序运行: (1)在offline的情况下,打开项目程序中的一个 程序功能块;
(2)在打开的编辑窗口中,选择菜单Debug项目 中Monitor子项,就会以绿色来修饰程序的运 行情况,窗口右下会显示程序正在运行。
实现步骤: 01.依次点击菜单:开始SIMATIC SIMATIC NETSettingsSet PG-PC Interface 启动PG-PC接口设定界面;
02.在Access Point of the Application项 中选择S7ONLINE (STEP7) TCP/IP <本机网卡绑定>
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
7
SIMATIC S7
SIMATIC S7-400 与 WinCC V6.0 通讯
07.继续用鼠标左键点击TCP/IP项,单击鼠标右键选择系统参数,会出现系统 参数对话窗口,其中SIMATIC S7 选项卡使用配置默认值就好,在单元选项卡 中,逻辑设备名称选项要求填写为TCP/IP<本机网卡绑定>。
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
11
SIMATIC S7
SIMATIC S7-400 与 WinCC V6.0 通讯
11. 最后保存画面后,点击快捷按钮,运行画面程序。
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
12
SIMATIC S7
SIMATIC S7-400 与 InTouch V9.0 通讯
SIMATIC S7-400 与 Step7 V5.3 通讯
前提:本例在安装有以下软件的PC机上实现通讯。 1.SIMATIC NET V6.0+SP2;
2.SIMATIC Step7 V5.3;
实现步骤: 01.依次点击菜单:开始SIMATIC SIMATIC NETSettingsSet PG-PC Interface 启动PG-PC接口设定界面;
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
16
SIMATIC S7
SIMATIC S7-400 与 InTouch V9.0 通讯
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
4
SIMATIC S7
SIMATIC S7-400 与 WinCC V6.0 通讯
前提:本例在安装有以下软件的PC机上实现通讯。 1.SIMATIC NET V6.0+SP2; 2.SIMATIC WinCCV6.0;
02.在Access Point of the Application项 中选择S7ONLINE (STEP7) TCP/IP <本机网卡绑定>
03.点击桌面 件;
图标,启动Step7软
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
9
SIMATIC S7
SIMATIC S7-400 与 WinCC V6.0 通讯
09.下面用鼠标选择项目树型结构中的 图形编辑器,在窗口右侧区域点击鼠 标右键选择新建画面,点选新建的画 面,双击鼠标左键,打开图形编辑软 件,在对象选项板中,点击圆对象, 然后在画面上画一个圆。