自适应前照灯系统afs
汽车自适应前照等(AFS)系统

灯光与照明技术/标准委员会
灯光与照明技术/标准委员会
前轮
灯光与照明技术/标准委员会
后轮
2.光源系统:
汽车蓄电池给电子镇流器供电12V,电子镇流器 启动,产生高压脉冲(约22000伏),HID光源 启动。之后镇流器稳定输出85伏的交流电压, 使光源启动后工作于正常电流0.4安,灯泡功率 维持在35瓦左右。如图所示,在该HID光源启动 后1秒内,光源能发出额定光通量的1/4,即800 流明(=3200流明×25%),接近H4光源副丝的 水平;在4秒内,达到额定值的80%,即2560流 明,远高于H4光源主丝的水平。这样,就充分 保证了装配HID前照灯的汽车夜晚行驶的安全。
灯光与照明技术/标准委员会
4.电机:
用于实现AFS功能中E模式(高速公路模式)及静&动态自动水平调光功能。
灯光与照明技术/标准委员会
电机根据功能及通信方式有很多种结构 和分类,在此不再一一描述,感兴趣的 同事可以单独交流。
5.控制器:Master ECU
控制系统是核心,MasterECU从总线或硬线束获取信号单元发送或传感器输出的信号,进行相应 的计算、处理,形成相应的控制信号并发送至SlaveECU再到各执行机构。控制系统具有能够响应高 速总线丰富的指令集以及极短的指令周期和极高的处理速度的单片机,在保证控制系统的稳定性和 可靠性的同时,保证系统控制精度和速度。
灯光与照明技术/标准委员会
3.光学系统-投射灯:
投射灯光学系统(PES)是实现AFS功能 必不可少的,PES 单元安装在PES支架上, 在AFS工作时,PES单元通过旋转执行机 构驱动而绕旋转轴转动,从而实现AFS中 的弯道照明功能。
PES有单近光和远近光一体两种形式,
Adaptive Frontlighting System 自适应前照明系统
自适应前照明系统的相关概念
双功能氙气灯
挡片沿轴向旋转
13/12/13
Shanghai Branch of MM China e University
15
AFS (Adaptive Front Lighting System)
• • • • • •
自适应前照明系统的相关概念 照明的垂直调节与水平调节 电子控制系统 AFX简介 LFX简介 LED应用简介
高速公路行驶(高速公路照明类型II, Motor Way Light II)
13/12/13
Shanghai Branch of MM China e University
9
自适应前照明系统的相关概念
弯道行驶(乡村照明,无水平方向照明调节系统, Country Light)
13/12/13
动态垂直调节
± 3°
静态垂直调节
正常情况下的近光灯照射的上下边界
±3°
正常情况
加速情况下的对近光灯的调节 ±3°
有负载的情况
13/12/13
刹车情况下的对近光灯的调节
Shanghai Branch of MM China e University
17
照明的垂直调节
垂直调节所需的输入信号
输入信号 近光灯状态 发动机状态 车速 前车轴高度 前车轴高度传感器 机械变化 电气变化 控制器 计算车身 倾斜度 后车轴高度传感器 机械变化
24
照明的垂直调节与水平调节
垂直调节范围与水平调节范围
功能
范围
静态水平调节 由客户要求决定 / / /
动态水平调节 0°~ 15° 0°~ 7.5° / /
静态垂直调节 / / 0°~ 3° 0°~ 3°
afs是什么意思

afs是什么意思
afs是随动转向大灯。
随动转向大灯即自动转向大灯,也可以叫做自动头灯。
随动转向大灯简称AFS,全称为汽车自适应前大灯系统或者智能前照灯系统。
自适应前大灯系统AFS(Adaptive Front-Lighting System),能够根据汽车方向盘角度、车辆偏转率和行驶速度,不断对大灯进行动态调节,适应当前的转向角,保持灯光方向与汽车的当前行驶方向一致,以确保对前方道路提供最佳照明,并对驾驶员提供最佳可见度,从而显着增强了黑暗中驾驶的安全性。
在路面照明差或多弯道的路况中,扩大驾驶员的视野,而且可提前提醒对方来车。
自适应前照灯控制系统

自适应前照灯控制系统
概述
自适应前照灯控制系统(Adaptive Front-lighting System,简称AFS)是一种智能灯光调节系统。
通过感知驾驶员操作、车辆行驶状态、路面变化以及天气环境等信息,AFS 自动控制前照灯实时进行上下、左右照明角度的调整,为驾驶员提供良好的道路照明效果。
经纬恒润作为AFS控制系统供应商,已经成功为包括通用(GM)、上海通用(SGM)、长城、上汽、北汽、广汽、一汽在内的多家国内外客户进行了AFS控制系统的配套。
系统功能
自适应前照灯控制系统能够显著改善各种路况下的照明效果,提高行车安全。
虚线表示无动态调光的光照角度
上下调节功能
左右调节功能
系统组成
乘用车的自适应前照灯控制系统由主控制器单元、左/右旋转执行器、左/右调光电机、前/后车身高度传感器组成。
AFS 系统(上下左右调节功能)
ALS 系统(上下调节功能)。
弯道辅助照明系统 AFS及侧向辅助照明系统ALS解析
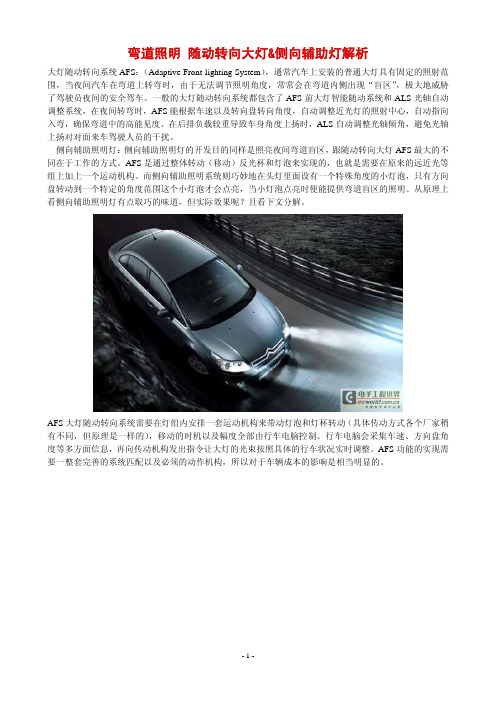
弯道照明 随动转向大灯&侧向辅助灯解析大灯随动转向系统AFS:(Adaptive Front-lighting System),通常汽车上安装的普通大灯具有固定的照射范围,当夜间汽车在弯道上转弯时,由于无法调节照明角度,常常会在弯道内侧出现“盲区”,极大地威胁了驾驶员夜间的安全驾车。
一般的大灯随动转向系统都包含了AFS前大灯智能随动系统和ALS光轴自动调整系统,在夜间转弯时,AFS能根据车速以及转向盘转向角度,自动调整近光灯的照射中心,自动指向入弯,确保弯道中的高能见度。
在后排负载较重导致车身角度上扬时,ALS自动调整光轴倾角,避免光轴上扬对对面来车驾驶人员的干扰。
侧向辅助照明灯:侧向辅助照明灯的开发目的同样是照亮夜间弯道盲区,跟随动转向大灯AFS最大的不同在于工作的方式。
AFS是通过整体转动(移动)反光杯和灯泡来实现的,也就是需要在原来的远近光等组上加上一个运动机构。
而侧向辅助照明系统则巧妙地在头灯里面设有一个特殊角度的小灯泡,只有方向盘转动到一个特定的角度范围这个小灯泡才会点亮,当小灯泡点亮时便能提供弯道盲区的照明。
从原理上看侧向辅助照明灯有点取巧的味道,但实际效果呢?且看下文分解。
AFS大灯随动转向系统需要在灯组内安排一套运动机构来带动灯泡和灯杯转动(具体传动方式各个厂家稍有不同,但原理是一样的),移动的时机以及幅度全部由行车电脑控制。
行车电脑会采集车速、方向盘角度等多方面信息,再向传动机构发出指令让大灯的光束按照具体的行车状况实时调整。
AFS功能的实现需要一整套完善的系统匹配以及必须的动作机构,所以对于车辆成本的影响是相当明显的。
在实际照明效果方面,大灯的光束非常及时地随方向盘转动而转向弯道的内侧,在车辆还没有到达弯心前已经能够照亮弯道内侧的视野盲区,同时留在弯道前方路面的有效光线也会比一般大灯多,简而言之就是驾驶者能够清晰看到更远的路面状况。
如果弯道内存在行人或障碍物时,拥有AFS功能会比一般车辆更早发现这些状况。
分布式驱动电动汽车AFS和DYC协调控制策略研究

分布式驱动电动汽车AFS和DYC协调控制策略研究摘要随着人们对环境保护意识的不断提高,电动汽车被越来越广泛地应用。
然而,电动汽车的安全性能和驾驶体验仍然需要提高。
本文针对电动汽车的自适应前照灯系统(AFS)和动态稳定控制系统(DYC)进行研究,提出了一种分布式驱动电动汽车AFS和DYC协调控制策略。
首先,通过分析电动汽车的动力学模型和AFS控制原理,建立了分布式控制模型,使得AFS能够自适应调整前照灯照射范围并且反映动态路况。
其次,通过研究电动汽车的离散控制模型和DYC控制原理,提出了一种基于模型预测控制的DYC协调控制策略。
该策略采用了基于短期和长期预测的混合控制策略,有效地提高了电动汽车的稳定性和安全性。
最后,通过仿真实验对本文协调控制策略的有效性进行了验证。
实验结果显示,该策略能够使AFS和DYC系统之间实现协同控制,同时保持较高的车速和良好的驾驶舒适性。
这些结果为电动汽车的安全性能和驾驶体验的提升提供了一种新的思路。
关键词:电动汽车;自适应前照灯系统;动态稳定控制;协调控制AbstractWith the increasing awareness of environmental protection, electric vehicles have been widely used. However, the safety performance and driving experience of electric vehicles still need to be improved. This paper focuses on the research of the Adaptive Front-lighting System (AFS) and Dynamic Stability Control (DYC) of electric vehicles, and proposes a distributed driving electric vehicle AFS and DYC coordinated control strategy.Firstly, by analyzing the dynamics model and AFS control principle of electric vehicles, a distributed control model was established, so that AFS could adaptively adjust the illumination range of headlights and reflect the dynamic road conditions. Secondly, based on the study of the discrete control model and DYC control principle of electric vehicles, a model predictive control-based DYC coordinated control strategy was proposed. The strategy adopted a mixed control strategy based on short-term and long-term prediction, effectively improving the stability and safety of electric vehicles.Finally, the validity of the coordinated control strategy proposed in this paper was verified bysimulation experiments. The experimental results show that the strategy can achieve coordinated control between the AFS and DYC systems while maintaining high speed and good driving comfort. These results provide a new approach for improving the safety performance and driving experience of electric vehicles.Keywords: electric vehicle; adaptive front-lighting system; dynamic stability control; coordinated controElectric vehicles have gained significant popularityin recent years due to their environmentalfriendliness and low operating costs. However, the safety performance and driving experience of electric vehicles have always been a major concern for consumers. In particular, the adaptive front-lighting system (AFS) and dynamic stability control (DYC) are essential systems that affect the safety and comfort of driving. Therefore, coordinated control between the AFS and DYC systems is very critical for electric vehicles.Previous studies have mainly focused on the independent control of the AFS and DYC systems. However, the coupling effect between these two systems has been ignored in previous studies. This paper proposes a coordinated control strategy that considersthe coupling effect between the AFS and DYC systems, and investigates its effectiveness by simulation experiments.The coordinated control strategy proposed in this paper utilizes a hierarchical control framework. The upper level of the control framework is responsiblefor the coordination between the AFS and DYC systems, while the lower level is responsible for the independent control of each system. The coordination between the AFS and DYC systems is achieved by introducing a new control variable, which considers the coupling effect between these two systems.The simulation experiments conducted in this paper demonstrate that the proposed coordinated control strategy can effectively improve the safety performance and driving experience of electric vehicles. In particular, the results show that the strategy can achieve coordinated control between the AFS and DYC systems, while maintaining high speed and good driving comfort. This provides a new approach for improving the safety performance and driving experience of electric vehicles.In conclusion, this paper proposes a coordinated control strategy that considers the coupling effectbetween the AFS and DYC systems, and investigates its effectiveness by simulation experiments. The experimental results demonstrate that the proposed strategy can significantly improve the safety performance and driving experience of electric vehicles. Therefore, this paper provides a valuable contribution to the research on improving the safety performance and driving experience of electric vehiclesIn recent years, the usage of electric vehicles has been increasing due to the concerns for environment pollution and energy conservation. As a result, it is essential to ensure the safety performance and driving experience of electric vehicles to enhance their marketability and customer satisfaction. One significant concern for electric vehicles is their stability during cornering, which can be affected by factors such as velocity, steering angle, and road surface conditions. Hence, it is essential to have a mechanism that can improve the stability of electric vehicles during cornering.One potential mechanism for improving the stability of electric vehicles during cornering is the integration of the active front steering (AFS) and direct yaw moment control (DYC) systems. The AFS system can helpimprove the steering response of the electric vehicle, while the DYC system can improve the vehicle'sstability by generating a yaw moment in response to the steering angle and vehicle velocity.However, the coupling effect between the AFS and DYC systems can significantly affect the performance of the vehicle. Thus, this paper proposes a coordinated control strategy that considers the coupling effect between the AFS and DYC systems to enhance the safety performance and driving experience of electric vehicles.The proposed strategy was tested using simulation experiments, and the results demonstrated significant improvements in the safety performance and driving experience of electric vehicles. Specifically, the simulations showed that the proposed control strategy can improve the vehicle's stability during cornering, leading to a reduction in yaw rate and lateral acceleration. Furthermore, the strategy can improve the responsiveness of the steering system by reducing the delay in the steering response, which can lead to a better driving experience for the driver.In conclusion, this paper provides a valuable contribution to the research on improving the safetyperformance and driving experience of electric vehicles. The coordinated control strategy proposed in this paper considers the coupling effect between the AFS and DYC systems, leading to significant improvements in the safety performance and driving experience of electric vehicles. Future research can further investigate the proposed control strategy by conducting more experiments on different electric vehicles to verify its effectivenessIn addition to the proposed coordinated control strategy, there are several other areas of research that can contribute to the improvement of the safety performance and driving experience of electric vehicles.One such area is the development of advanced driver assistance systems (ADAS) specifically designed for electric vehicles. ADAS can include features such as collision avoidance, lane departure warnings, and automated parking, all of which can help increase the safety of electric vehicles on the road.Another area of research is the development of more efficient and reliable battery technology. Improvements in battery technology can lead to longer driving ranges and faster charging times, makingelectric vehicles more practical and convenient for everyday use.Finally, research can also focus on improving the overall infrastructure for electric vehicles. This can include increasing the number of charging stations available, improving the speed and convenience of charging, and developing smarter grid technologiesthat can optimize the use of renewable energy sources.Overall, continued research and development in these areas can help increase the safety, efficiency, and convenience of electric vehicles, paving the way for a more sustainable and environmentally friendly transportation systemIn conclusion, electric vehicles have the potential to significantly reduce greenhouse gas emissions from transportation, but there are still challenges that need to be addressed to fully realize their benefits. Improving battery technology, increasing the range of vehicles, and developing smart charging and grid technologies are all important areas for research and development. Additionally, infrastructure improvements such as increasing the number and convenience of charging stations can help support the growth of electric vehicles. By addressing these challenges andinvesting in the continued development of electric vehicle technology, we can create a more sustainable and environmentally friendly transportation system。
汽车用自适应前照明系统标准解读与分析

汽车用自适应前照明系统标准解读与分析孙晓娜武华堂陈萍韩思远刘然张萌国家汽车质量监督检验中心(襄阳),湖北襄阳441004摘要:为了更好地理解自适应前照灯系统(Adaptive Front-lighting System,简称AFS)测试标准及顺利开展汽车灯具检测工作,以欧标ECE R123为依据,首先对近光主要配光测试点进行解读,分析了AFS系统各近光模式功能和配光要求之间的差异;其次,将其与现行的国家标准GB/T30036进行了对比分析;最后,研究了AFS与传统前照灯在配光试验时检测方法和测试点的差异。
关键词:AFS;标准;传统前照灯;对比分析引言随着车辆的迅速普及,驾驶安全问题也日益凸显,作为汽车主动安全装置之一的照明系统的改进和创新也成为人们关注的焦点[1]。
但实际的道路环境、天气状况等情况十分复杂,传统照明系统的单一照明模式已经无法满足人们日益增长的行驶安全需求[2-3]。
因此,改变传统的汽车前照明的固有模式,研究新型的AFS系统已经成为世界各国提高汽车安全性和舒适性的主流趋势之一[4-5]。
AFS系统不止具有一种照明模式,是一种能够根据汽车所处的路况、天气环境以及自身的状态,自动产生一种符合该环境条件的光束,实现最好照明效果的智能汽车前照灯系统[6]。
随着AFS的实际应用,联合国欧洲经济委员会于2007年正式发布ECE R123《关于机动车自适应前照明系统(AFS)认证的统一规定》法规,对AFS制定了明确的定义及相关规定。
文章主要以最新修订的欧标ECE R123/02为依据[7],对近光配光规定进行解读与分析,并将其与国家标准GB/T30036—2013[8]和传统前照灯测试国家标准进行比较,这对设计汽车前照灯的研究和检测汽车灯具工作有着重要的意义。
法规解读ECE R123/02法规内容主要包括3个章节,分别为A章节法规的管理条款、B章节法规的主要技术内容和C章节取证后的管理方法。
这里将重点研究B章节部分,主要内容为AFS的配光试验,规定了AFS各种模式光型在配光屏幕上关键点区的光度值,是判定AFS系统和AFS配光设计的标准。
自适应前照灯的工作原理

自适应前照灯的工作原理
自适应前照灯(Adaptive Front Lighting System,AFS)是一种先进的汽车前照灯系统,它根据车辆驾驶状况和环境条件自动调整光束的方向和亮度,以提供最佳的照明效果和安全性。
以下是自适应前照灯的基本工作原理:
1.车速和转向角度检测:自适应前照灯系统会通过车辆的传
感器监测车速和方向盘的角度,以了解车辆的当前行驶状态。
2.环境照明检测:该系统还使用环境光传感器来检测周围的
照明条件,例如路灯亮度、其他车辆的前灯状态等。
3.算法和控制模块:基于车速、转向角度和环境状况的检测
数据,自适应前照灯系统的算法会计算出最适合的光束方向、亮度和灯光模式。
4.光束方向调整:根据算法的计算结果,自适应前照灯系统
会通过电动或液压机构,将前照灯的光束在水平和垂直方向上进行调整,以适应车辆的转向和车速变化,确保最佳的照明范围。
5.光束亮度调整:根据环境照明检测结果,自适应前照灯系
统会自动调整前照灯的亮度,以避免过亮或过暗对其他道路用户造成干扰,并提供最佳的照明效果。
总的来说,自适应前照灯系统通过车速、转向角度和环境条件的实时监测与分析,自动调整前照灯的光束方向和亮度,以提
供最佳的照明效果和安全性。
这种技术可以使驾驶者在夜间或复杂道路条件下获得更好的可见性,并减少对其他车辆的干扰。
自适应前照明系统_AFS_简介及发展趋势
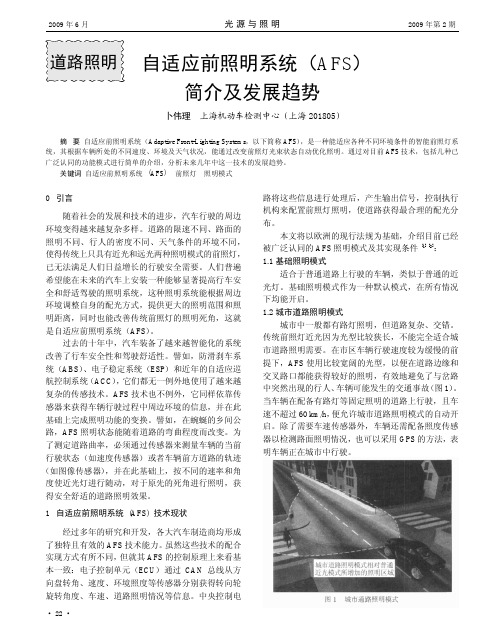
议上发言, 介绍 LED 路灯的产品和品种以及达到的质 量水平; 同时还邀请了 9 位专家学者就这方面内容和 国际上的现状作了介绍, 还宣传和说明了道路灯具的 性能标准和有关文件, 对全体与会代表的启发很大, 因 此每年的会议吸引了越来越多的参与者。
会议上安排了代表们在晚上参观了余姚市内使用 LED 路灯的路段, 实地体会了在 LED 路灯照明下道路 上的照明效果。有三条使用不同公司不同功率 (120 W、 150 W 和 180 W) 的 LED 路灯。并考察宁波安迪光电 科技有限公司的生产车间和点灯现场。
预见型 AFS 也是目前各大汽车制造商研制开发新 型 AFS 的主要方向。其概念主要基于车辆内部传感器 和外部环境传感器所获得的车况和环境状况信息,以 及对这些信息的处理方法。鉴于各类传感器所提供的 信息量非常巨大,一种能对信息进行高效处理的算法 尤显重要。
2.1.1 传感器 传统 ESP 系统所使用的一些车辆内部传感器(方 向盘转角传感器、加速度传感器以及车轴转速传感器) 可以提供车辆当前行驶状况信息,并通过数据库获得 对车辆转向角度的预测。 此外,还可以通过环境传感器譬如影像传感器来
另一方面,LED 技术在车辆照明灯具上的使用还 处于初级阶段,虽然与当前流行的 HID 光源比较优势 尚少,但随着 LED 新产品的不断开发,发光效率将越 来越高,其在 AFS 中的应用将有很大的发展空间。
参考文献
1 ECE R48 Revision 5 “uniform provisions concerning the approval of vehicles with regard to the installation of lighting and light-signalling devices”:78~80.
智能前照灯系统(AFS)概论

上个世纪80年代,人们在驾车时为了寻求更为稳定和安全的行驶,对前照灯系统提出了更高的要求,因此氙气大灯(HID 放电灯)应运而生。
HID放电灯的使用较之以往的卤素车灯,具有较高的亮度和较远的投射范围。
到了上个世纪末,LED作为新型光源被更广泛的应运在车灯上,LED凭借自身的体积小、寿命长、低热量等诸多优点逐渐受到更多人们的喜爱。
但是,不论是氙气灯还是LE D光源,只能工作在一种模式下。
然而,随着驾驶环境的复杂程度以及天气条件的影响,尤其在夜晚发生交通事故的概率越来越高。
所以,需要一种前照灯,能够满足随着驾驶环境的改变而改变其光线,这也就是智能前照灯系统(AFS)。
智能前照灯系统(Adaptive Front-lighting System,简称AFS)是一种智能的灯光调节系统。
通过感知驾驶员操作、车辆行驶状态、路面变化以及天气环境等信息,AFS自动控制前照灯实时进行上下左右照明角度的调整,为驾驶员提供最佳道路照明效果。
智能前照灯系统的四大组成部分:传感器组(车速传感器、车身高度传感器、方向盘转角传感器、雨量传感器、光敏传感器等)、传输通路(CAN总线)、处理单元和执行机构(步进电机等)。
智能前照灯系统工作的基本原理是:中央处理器通过传输通路、传感器组采集车速、转向、道路状况等信息(其实AFS与汽车上的传感器信息共享),并进行处理分析,给执行机构发出指令,执行机构做出相应动作,同时反馈电路给中央处理器信息,进行不断的修正,达到预期的效果(如图1)。
智能前照灯系统能够显著改善各种路况下的照明效果,提高夜间行车的安全性,按其系统功能主要分为以下几种情况。
(1)乡村道路模式(Class C):基本光型模式。
(2)高速公路模式(Class E):高速路上照射距离更远,灯光更汇聚,亮度更强。
(3)城市道路模式(Class V):在城市道路上,将左灯光轴向左下方旋转(车辆靠右行驶),提高驾驶员左侧人行道上的照明。
客车用AFS偏转规律研究

Ri2 + Ld
) + arccos(
Ri2 + d 2 + 2 Ld
Ri
) (2)
Ri2 + d2 + 2Ld
Ri
)] (3)
Ri2 + d 2 + 2 Ld
式中,L 为轴距;d 为前悬;a 为前内侧灯到旋转中心长
度;R 为前内侧轮转弯半径;θi 为前内侧轮转角;δ1,δ2,δ 为角度增量; αi 为前内侧车灯偏转角度; αo 为前外侧车灯
理建立前照灯转向数学模型,分析内外侧前照灯左右水平偏
转规律。
图 1 前照灯左右偏转策略
ai = θi + δ1 + δ2
=θi + arccos( Ri
Ri2 + Ld
) + arccos(
Ri2 + d2 + 2Ld
a = 1 (θ+ δ+ δ)
o 2i
1
2
1 = 2 [θi + arccos( Ri
所示。
图 3 七自由度模型
图 2 推导模型与简化模型的差值
这 2 种控制策略的差值很小,在前轮转角为 5°左右,其
差值最大接近 0.1°,而 0.1°的误差在前照灯的控制规律上是
很小的,可以忽略不计。因此我们可以将式(4)简化成关于
前内侧车轮转角的一次函数。通过模拟计算得出对应本车型
XMQ6117Y3 的 k 值,其大小为 2.4。在忽略助力转向功能的
图 4 前照灯俯仰调整策略图
俯仰运动对应的前照灯俯仰调整角度数学模型:
γ= δ+ β2
β1
=
δ+
ALS自适应前照灯系统简介
AFS专论1·AFS自适应前照灯系统简介AFS(Adaptive Front Lighting System)自适应前照灯系统简介AFS是指能自动改变两种以上的光型以适应车辆行驶条件变化的前照灯系统。
[1]AFS是目前国际在车灯照明领域最新的技术之一,同时也是一个和行车安全息息相关的主动式安全系统。
AFS研发背景传统的前照灯系统是由:近光灯、远光灯、行驶灯和前雾灯组合而成。
在城市道路行驶并且限速的情况下,主要采用近光;在乡间道路或者高速公路上高速行驶的时候,主要采用远光;雾天行驶的时候,应该打开雾灯;白天行驶,应该打开行驶灯(欧洲标准)。
但是实际的使用中,传统的前照灯系统存在着诸多问题。
例如,现有近光灯在近距离上的照明效果很不好,特别是在交通状况比较复杂的市区,经常会有很多司机在晚上将近光灯、远光灯和前雾灯统统打开;车辆在转弯的时候也存在照明的暗区,严重影响了司机对弯道上障碍的判断;车辆在雨天行驶的时候,地面积水反射前灯的光线,产生反射眩光等等。
欧洲汽车照明研究机构曾经就此作过做专项调查,结果显示,欧洲司机们最希望改善的是阴雨天气积水路面的照明,排在第二位的是乡村公路的照明,接下来依次是弯道照明、高速公路照明和市区照明。
[1]上述这些问题的存在,就使得研制一种具有多种照明功能的前照灯成为必要,并且这些功能的切换,出于安全上的考虑,必须是自动实现的。
所以欧洲和日本相继研制了这种自动适应车辆行驶状态的前照灯系统——AFS(自适应前照灯系统)。
AFS功能简介阴雨天气的照明:如图1、图2所示,阴雨天气,地面的积水会将行驶车辆打在地面上的光线,反射至对面会车司机的眼睛中,使其目眩,进而可能造成交通事故。
AFS有效的解决方法是:前灯发出如图所示的特殊光型,减弱地面可能对会车产生眩光的区域的光强。
[1]图1 雨天积水反射的AFS光线(侧视)图2 雨天积水对AFS光线的反射(俯视)乡村道路的照明:在环境照明不好的乡村道路上高速行驶的车辆,需要的是照得远,照得宽的前照灯。
AFS系统

Ford的全新AFS智能型 主动转向头灯技术
Ford的AFS系统整合了卤素灯以及LED两种 不同灯具,能够让照明更平均,也更为省电。 当AFS系统侦测到车辆在转向的时候,LED 灯组的方向会在极短的时间之内做出反应, 卤素灯组也会立刻改变方向,提供弯道死角 处的照明。而LED灯组照明的比率以及亮度, 则取决于车辆转弯时的速度以及轮胎转动角 度。当车辆离开弯道转正的时候,LED灯组 会自动熄灭以减少能源消耗。
ALS
如果说AFS控制的是灯光的"左右"调整,那么ALS控 制的则是灯光的"上下"调整。通常,汽车大灯的光 轴与车身水平线保持一致。如果后排负载较大,车 身水平线难免会出现上扬,因此大灯的光轴也随之 上扬,会对对面车辆的驾者产生干扰。一般驾者都 会对此深恶痛绝,实际上,这也正是导致许多车祸 发生的原因。ALS在后排负载较重导致车身角度上 扬时,可自动调整光轴倾角,保持光轴水平,避免 光轴上扬对对面来车驾驶人员的干扰。
在AFS的技术和转向机制上各家车厂都不近相同,以 Ford(褔特)Focus为例,其AFS在时速3km以下时,
为了避免灯光造成对向车道驾驶的困扰,仅能向右启 动。在3km/h以上时,会自动启动最多14度的左右转 向。BMW(宝马)的主动式转向头灯,会随着车速 自动调节灯光的照明长度范围,在低于时速50km的
市区模式当中,更散射的灯光将会让驾驶能看清楚左
右两侧的路况;在高速公路模式下,光线照射的长度
将会增加,以协助驾驶看清前方更远的距离。当驾驶 开启雾灯的同时(高于时速70km),光线则会增加
强度并且增加照明范围的宽度,以提供更佳的视线范 围。未来AFS还有可能结合雷逹系统、夜视系统等先 进电子配备,为车辆提供更多信息或是结合GPS的讯
AFS自适应前照灯系统

AFS自适应前照灯系统(Adaptive Front-Loght System)一、功能根据车辆的行驶状况、路状以及天气来适时的调节前照灯的照射角度、形状、光亮度以及照射时间,从而达到相应状况下的最优照明表现。
二、工作原理及系统图AFS系统分为两大部分:1、前照灯光束高度自动控制系统2、智能AFS自适应前照灯系统1、前照灯光束高度自动控制系统前照灯点亮时,前照灯光束高度自动控制系统根据车辆的行驶状况,操作前照灯光束高度调节电动机。
AFS ECU根据高度控制传感器和各ECU的信号计算车辆状态的变化,然后ECU根据该信息控制前照灯光束高度调节电动机,以改变前照灯反射器角度。
2.智能AFS(自适应前照灯系统)智能AFS通过移动近光,在转向过程中保持大范围的近光照明及良好的视野。
智能AFS 采用中高速控制和低速控制。
在中高速控制过程中,系统根据转向角和转速计算目标光照角,并分别改变各近光前照灯的放置角。
在低速控制过程中,系统根据转向角计算目标光照角,并改变入弯侧近光前照灯的旋转角。
低速控制满足下死所有条件,AFS ECU执行低速控制·发动机正在运转·车辆正以10Km/H或更高的速度向前行驶·转向角为6º或更大·近光灯点亮·AFS OFF开关关闭旋转范围中速控制·发动机正运转·车辆正以30Km/h或更高时速前进·转向角为7.5º或更大·近光灯点亮初始化设定控制发动机起动时,AFS ECU驱动前照灯旋转执行器,将前照灯投射光束向车辆中间方向移至操作极限位置,然后使其返回到正常位置。
从而,AFS ECU估算进行基准控制的前照灯位置。
自适应前照明系统
五、自适应前照明系统的应用
• 奔驰E级LED智能照明系统具有5种发光模式,分别是乡村道路照明、 高速公路照明,增强型雾灯、主动转弯照明和弯道辅助照明。
2020/5/7
本章 小节
1、自适应前照明系统定义及组成 2、自适应前照明系统工作原理 3、自适应前照明系统功能 4、自适应前照明系统的应用
智能网联汽车技术
V2X ICV
Landar
5G
——冷却系统 ——自适应前照明
HD Map 系统
主讲人:
3课时
ADAS辅助驾驶系统
自适应前照明系统的定义及组成 自适应前照明系统的工作原理及功能 自适应前照明系统的应用
一、自适应前照明系统的定义
• 自适应前照明系统(AFS):根据天气情况、外部光线、道路状况 以及行驶信息,自动改变前照明系统的工作模式,调整照射光线 的光形,消除视野暗区,为驾驶员提供更宽范围、更为可靠的照 明视野,保证驾驶员和道路行人的安全
• (3)系统在前照灯初始化置位时,通过获取霍尔位置传感器的位置 信号,判断前照灯实际运行的角度与控制单元输出角度之间的误差, 如果误差不大,通过角度PD调节算法对误差进行调节;如果误差过大 ,说明前照灯出现了故障,系统会产生故障报警信号提醒驾驶员前照 灯出现故障
• (4)系统通过液晶显示装置实时显示系统的工作状态,包括车速状 态、转向盘转角状态、车灯转角状态等
2020/5/7
三、自适应前照明系统的工作原理
• (2)系统通过获取大灯开关器件信号和环境光强传感器的光照强度信号 ,对前照灯开关进行控制,系统会设置一个光照阈值,当光照强度小于阈 值时,系统自动延时打开前照灯;当光照强度大于阈值时,系统自动延时 关闭前照灯
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自适应前照灯系统——AFS
AFS系统全名适路性前方照明系统(Adaptive Frontlighting System),他的功能的伸缩性很大,根据我们在车辆照明实际使用过程中所遇到的所有问题而采取的技术革新,就目前能够实现的功能(也就是目前最好的AFS的功能)可以根据车辆的行驶状况(例如高速巡航时、紧急刹车时、启动时等),路况(例如高速公路、城市公路、乡村公路等)以及天气(例如下雨、下雪等)来适时自动的调节前照灯的照射角度、形状、光亮度以及照射时间,从而达到相应状况下的最优光照表现。
而我们所采用的AFS的设计比较简单,仅根据车辆行驶方向的改变来控制固定照射角度的转向辅助照明灯。
其使用方法为:在大灯开启状态下,方向盘向左转,大于开启角度的时候,左侧转向辅助照明灯就会自动开启,当方向盘转回来,小于开启角度的时候,转向辅助照明灯会自动关闭;向右转弯同样道理。
我们的这个照明系统属于AFS,但是因为它仅根据转向有关,所以我们在跟客户介绍的时候最好用这样的名称介绍----------AFS转向辅助照明系统、AFS转向辅助照明灯。
注意:此照明灯的开启与关闭与转向灯不发生关系,它是根据方向盘转动角度实现的,而转向灯在行驶时还要正常使用,不要因此而违反交通规则。
交车时一定要向客户解释清楚!
以上内容是为我店销售顾问做的总结,希望得到大家的指正,加以完善,非常感谢!
下面是从网上下载的一篇关于AFS的介绍
科技的进步带给人们越来越多的惊喜和愉悦,自适应前照灯系统便是一例。
它使得夜晚驾驶变得不再令人恐慌,甚至心旷神怡,没准会有更多的驾驶者爱上夜晚出行去享受黑夜的浪漫。
AFS的全称是自适应前照灯系统。
作为当今世界最先进的汽车照明系统,它能够有效地降低驾驶者在夜晚弯路上行车的疲劳程度,使驾驶者能够看清转弯处的实际路况,进而有充分的时间来应付紧急情况,从而明显提升夜晚弯路上行车的安全性。
虽然夜晚事故发生率只占所有交通事故的28%,但是其死亡事故的几率却高达白天死亡事故的两倍以上。
这再次证明被誉为"汽车眼睛"的车灯对行车安全性及舒适性具有举足轻重的意义。
AFS系统能够减缓驾驶者在夜晚弯路上行车的恐慌情绪,使驾驶者能够拥有充分的时间进行转向操纵和应付紧急情况。
自动转向照明具有降低驾驶者夜晚行车劳动强度的重大意义。
此系统能够增加弯道的照射面积达20度左右,按照40KM/h的车速测算,能够为驾驶者将反应余量增加3秒以上。
这一点对于时常进行夜晚运输的专业驾驶员而言至关重要。
就小糸集团内部的定义来说,现在世界上使用的所谓AFS系统并不是真正意义上的AFS,现在的AFS
只是在自动动态调光系统的基础上增加了转弯照明的功能。
真正意义上的AFS系统应该包括根据车辆的行驶状况(例如高速巡航时、紧急刹车时、启动时等),路况(例如高速公路、城市公路、乡村公路等)以及天气(例如下雨、下雪等)来适时自动的调节前照灯的光形,从而达到相应状况下的最优光照表现。
小糸的AFS系统分为前向通道和后向通道两个部分,分别包括车身传感器、BUS节点、控制模块(ECU)以及执行机构等。
系统能够根据车身的动态变化、转向机构的动作特性、发动机的工作状态等综合因素进行计算和判断,从而判定汽车当前的行驶状态并对前照灯近光进行相应的调整。
带弯道转向照明的AFS系统的执行机构由步进马达来担当,步进马达具有行程准确、动作平稳、工作寿命长等特点。
且考虑到系统
的动作精确性和失效安全性,整个系统采用了带补偿的闭环反馈控制,从而保证在某些机构故障失效的情况下,仍然能够让前照灯具有普通的照明功能,这样就能够使整个系统无论任何情况都不会对使用者产生安全隐患。
小糸的AFS系统分为舒适型和运动型两种类型,分别适用于不同定位的车辆。
两种系统在动作状态,动作幅度以及动作速率上都有很大的不同;在车辆的开发过程当中,小糸的工程师会根据主机厂对车辆的定位、底盘的调校、避震系统的类型和特性、转向机构的灵敏程度和空转角度以及轴距的长度等综合因素进行评估分析,从而给出主机厂最适合本车型的系统解决方案。
在与主机厂就系统的基本类型达成一致以后,再根据车型的具体情况进行设计。
目前,上海小糸已经对天津丰田锐志AFS前照灯完成了国产化开发工作,目前正在进行新款丰田佳美AFS前照灯系统的开发工作;同时和国内多家主机厂密切接触,积极推进AFS前照灯系统在国内的普及。
AFS前照灯系统作为车灯技术的一项重大突破,对夜间行车的安全性产生了飞跃性的提高,同时大大提升了行车照明的舒适性;这一点在日本和欧洲的汽车制造商当中已经成为一个共识;特别是一些日本的汽车制造商,在其高档轿车中标配AFS系统的同时,将AFS系统在中档甚至中低档轿车车型中作为选配列出。
相信在不久的将来,国内的车厂也会逐渐的接受并认同AFS系统在主动安全方面的重大裨益,从而使更多的中国消费者也能够从中获益;同时作为专业灯具制造商的上海小糸车灯有限公司也将不遗余力的配合汽车制造商将此系统推向普及。
新天籁的AFS点亮角度,仅供参考: 0 -20km/h :方向盘转动角度80度; 20 -80 km/h:30 -80度; 80km/h以上:30度。