语音定位智能寻源垃圾桶的设计讲解
新型智能垃圾桶的设计方案
新型智能垃圾桶的设计方案新型智能垃圾桶的设计方案为了解决当前城市生活垃圾管理的难题,提高垃圾分类效率,我们团队设计了一款全新的智能垃圾桶。
这款智能垃圾桶将利用现代科技和人工智能技术,创造出更高效、环保的垃圾分类系统。
该新型智能垃圾桶的设计概念源于人们对于垃圾分类的需求。
我们深入了解了当前垃圾分类存在的问题,并结合用户反馈和市场调研,针对问题提出了创新设计方案。
首先,我们的智能垃圾桶采用了智能感应和自动分拣技术。
通过嵌入式传感器,垃圾桶能够感知到垃圾的种类和数量,并自动开启相应的分类箱。
例如,当用户投放塑料垃圾时,桶体会自动打开塑料垃圾箱,实现自动分类。
其次,我们将应用图像识别和语音识别技术,实现对于垃圾分类的智能辅助。
用户只需将垃圾放入桶内,垃圾桶会通过摄像头捕捉图像,并通过图像识别技术判断垃圾种类。
同时,垃圾桶还通过语音提示,向用户提供正确的分类信息,以引导用户正确投放垃圾。
此外,为了更好地提高垃圾桶的使用率,我们还考虑了垃圾桶的设计与美化。
传统垃圾桶在外观上大多呈圆筒状,显得单调且不协调。
我们将垃圾桶设计为流线型,外观光滑、美观大方。
与此同时,我们还为垃圾桶配备了LED照明灯,使其在夜晚光线不足的情况下也能清晰显示分类口。
为了增加用户对于智能垃圾桶的使用欲望,我们还在垃圾桶上设置了触摸屏和电子显示屏。
通过触摸屏,用户可以随时查询垃圾桶的使用情况和分类准确率。
而电子显示屏则会实时显示当日垃圾容量、剩余容量和分类比例等信息,让用户清晰了解垃圾桶的状态。
为了增加用户的参与感和激励效果,我们还为智能垃圾桶设计了积分制度。
用户每次正确投放垃圾都会获得一定积分,当积分达到一定数量后,可以兑换一些奖品或优惠券,以此来鼓励用户积极参与垃圾分类行动。
综上所述,我们设计的新型智能垃圾桶通过智能感应、自动分拣、图像识别、语音识别以及触摸屏和电子显示屏等技术元素,实现了高效、智能的垃圾分类。
同时,通过流线型外观和LED照明灯的设计,提升了其美观度和夜间可见性。
语音定位智能寻源垃圾桶的设计讲解
合泰杯单片机应用设计竞赛初赛报告书参赛编号:20160415 学校:重庆机电职业技术学院作品名称:采用语音定位技术的随叫随到智能垃圾桶指导老师:杨川参赛队员:向游李曼芸汤玲采用单片机型号: HT66F70A日期:2015 年12月30日一、摘要随着社会经济的不断发展,智能控制技术日益成熟。
现代家居中,人们越来越注重各种电器家具布局的智能化,合理化,科学化以及人性化。
本作品旨在设计一款基于HT66F70A单片机控制的智能家居垃圾桶,该智能垃圾桶采用声音和红外传感器,通过延时估计法实现声源方位的实时检测,具有语音控制垃圾桶行进功能和红外避障功能,同时,智能垃圾桶能快速识别用户发出的各种语音指示,自动完成开启、关闭垃圾桶等动作,真正实现随叫随到,为人们的日常生活带来便利。
本作品完成之后能够很好的管理垃圾桶满足用户的要求,符合科技型、可持续性发展社会的标准。
关键词:HT66F70A;声源定位;语音识别;红外式传感器二、作品介绍2.1作品背景随着中国城市和经济的迅速发展,人们的生活水平不断提高,人们在生活中产生的生活垃圾都需要垃圾桶放置,特别是老人、妇女或者残疾人,放置垃圾时存在的诸多不便、费时、费力等问题,提出了具有语音识别功能的智能垃圾桶设计方案,当用户想要扔垃圾时,只要一声令下,垃圾桶就会快速准确到达身边。
同时为了符合节约型、可持续性发展社会的标准,产生了对垃圾桶智能管理的需求。
传统垃圾桶存在占用室内面积,堵墙角过道,远程操控不变,不卫生等现象。
对于占用面积问题和不便捷问题,都是可以通过智能管理来完美解决的。
2.2创作目的为了在满足用户前提下最大限度的省时省力,解决垃圾桶使用便捷的问题,我们设计了一个语音识别系统,来控制垃圾桶的工作状态。
生活中人们都需到一定的垃圾桶放置处扔垃圾,而且考虑到老人、孕妇或者有残疾的病人,所存在的不便、费时、费劲等问题日益突出。
针对此问题,本系统提出了具有“随叫随到”功能的垃圾桶的设计方案,即当用户想要扔垃圾的时候,只要一声令下,垃圾桶就会快准确无误地来到身边。
基于声音识别的智能声控垃圾桶
2020.03科学技术创新基于声音识别的智能声控垃圾桶郭建军林丽君陈红斌*王克强蔡肯(仲恺农业工程学院自动化学院,广东广州510225)我们平常生活中产生的垃圾越来越多,垃圾问题渐渐成为社会问题,这将会严重影响生活的品质。
尤其对于室内生产生活来说,发展和使用智能垃圾桶[1,2],将垃圾桶中的病菌与人类隔绝起来是非常重要的。
这不仅仅可以提高生活质量,还可以使人们免受垃圾病菌的侵害。
正因为现实生活对使用智能垃圾桶并不普及,所以本文针对得不到重视的智能垃圾桶进行研究,以“基于声音识别的智能声控垃圾桶”为题进行研究,实现方便人们扔垃圾、将垃圾与人类隔绝起来等功能,从而达到它的隔离作用,方便人们的作用。
1系统方案设计基于声音识别的智能声控垃圾桶搭载在智能小车上移动,通过红外或者语音指令打开垃圾桶盖,就可以把垃圾安全方便地丢进垃圾桶了[3]。
1.1智能声控垃圾桶中的声音控制采用人声识别模块LD3320,它是一种具有识别深度的非特定人声识别模块,新IDE 软件识别深度不受限制,几乎可以识别我们日常生活中常用的所有语音指令;精细设计语音识别参数的语音识别模块可以通过特定的语音识别软件对语音音量、麦克风灵敏符、识别起始时间、语音端点检测识别等参数可以设置,从而使语音识别模块更适应日常环境,进而可以很好地应用到我们的装置中,达到声控的功能。
1.2在智能声控垃圾桶的盖子上我们采用自动打开和关闭的方式,在其中添加一个电机来控制盖子的运动方式,它由红外传感器、齿轮和力臂组成。
1.3智能声控垃圾桶的移动端,我们采用驱动小车的方式,这样能够随时控制装置的移动方向、运动轨迹,并对路径进行优化。
2系统硬件设计2.1控制器选型STM32单片机最小系统STM32F103C8T6主要由主芯片、上电复位电路、电源供电电路和时钟电路组成。
STM32F103C8T6芯片内核是ARM 32位的CortexTM-M3CPU ,内置高速存储器,足以保证数据快速读写和读取。
基于STM32系统的智能语音控制的垃圾桶设计
基于STM32系统的智能语音控制的垃圾桶设计苏珍康学亮马飞虎(北方民族大学,宁夏银川750021)摘要:随着计算机技术与电子科技的快速发展,人工智能、云计算等技术的不断进步,智能家居新型产业模式也得到了巨大的发展,至今国内智能家居市场投资达到了1396亿元,市场规模占比不断增大,未来十年内家居智能化将实现大规模应用。
鉴于此,设计了一种智能语音控制垃圾桶,能根据人发出的指令做出判断,运行到指定位置,收取完垃圾之后再回到起点位置。
关键词:智能家居;STM32;嵌入式;人工智能0引言随着人们生活起居水平的提高、社会的发展和经济水平的不断提升,人们对生活的要求更趋于个性化、定制化、自动化,对生活的便捷及乐趣有了更高的要求。
在平时生活中,扔垃圾是再简单不过的一件事情,但也会给人们带来不必要的麻烦。
比如,吃东西的时候不想走动,但也不想放一个垃圾桶在身边。
为解决这样的问题,此项目设计了一款能用语音控制、自动寻迹的垃圾桶。
该设计的主控系统采用STM32单片机,能够识别特定的语音指令,将语音信息转换为电信号给主控系统进行处理,主控系统在处理语音信息的基础上,判断在哪个位置有人需要,不再需要人们特意走动到垃圾桶边去扔垃圾。
1总体设计此项目所设计的智能语音控制的垃圾桶,是采用YS -V0.7语音识别模块来识别特定的语音指令,经STM32控制系统的数据处理做出判断,再通过寻迹系统去到指定的位置。
在寻迹的过程中,用16位的数字陀螺仪检测记录位置,对走过的轨迹做虚拟标记,再对虚拟标记进行数据处理,形成一个记忆系统,使接下来的寻迹判断更加灵敏,如图1所示。
2系统硬件设计2.1STM32F10X 主控系统STM32是ST 公司设计的一款常用的增强型系列微控制器,STM32F10X 系列产品属于中低端的32位基于ARM 系统的微控制器,其内核是Cortex -M3,常用于微控制、电机驱动、嵌入式系统开发等方面。
2.2MPU6050六轴陀螺仪在寻迹计算运动轨迹的过程中,判断左右移动的位移量,我们采用现在市场上最常用的六轴数字陀螺仪[1]MPU6050模块,此模块集成有三轴陀螺仪、三轴加速度计,通信方式为常用的IIC 通信协议,芯片内置16位的AD 转换器和16位数据输出,在精度上完全能够达到要求,并且降低了算法复杂度。
语音定位智能寻源垃圾桶的设计讲解
(20160415):(采用语音定位技术的随叫随到智能垃圾桶)合泰杯单片机应用设计竞赛初赛报告书20160415 校学参赛编号::重庆机电职业技术学院作品名称采用语音定位技术的随叫随到智能垃圾桶:指导老师杨川:参赛队员向游李曼芸汤玲:采用单片机型号 HT66F70A:2015 1230 日月日期:年一、摘要随着社会经济的不断发展,智能控制技术日益成熟。
现代家居中,人们越来越注重各种电器家具布局的智能化,合理化,科学化以及人性化。
本作品旨在设计一款基于HT66F70A单片机控制的智能家居垃圾桶,该智能垃圾桶采用声音和红外传感器,通过延时估计法实现声源方位的实时检测,具有语音控制垃圾桶行进功能和红外避障功能,同时,智能垃圾桶能快速识别用户发出的各种语音指示,自动完成开启、关闭垃圾桶等动作,真正实现随叫随到,为人们的日常生活带来便利。
本作品完成之后能够很好的管理垃圾桶满足用户的要求,符合科技型、可持续性发展社会的标准。
关键词:HT66F70A;声源定位;语音识别;红外式传感器二、作品介绍2.1作品背景随着中国城市和经济的迅速发展,人们的生活水平不断提高,人们在生活中产生的生活垃圾都需要垃圾桶放置,特别是老人、妇女或者残疾人,放置垃圾时存在的诸多不便、费时、费力等问题,提出了具有语音识别功能的智能垃圾桶设计方案,当用户想要扔垃圾时,只要一声令下,垃圾桶就会快速准确到达身边。
同时为了符合节约型、可持续性发展社会的标准,产生了对垃圾桶智能管理的需求。
传统垃圾桶存在占用室内面积,堵墙角过道,远程操控不变,不卫生等现象。
对于占用面积问题和不便捷问题,都是可-1-(20160415):(采用语音定位技术的随叫随到智能垃圾桶)以通过智能管理来完美解决的。
2.2创作目的为了在满足用户前提下最大限度的省时省力,解决垃圾桶使用便捷的问题,我们设计了一个语音识别系统,来控制垃圾桶的工作状态。
生活中人们都需到一定的垃圾桶放置处扔垃圾,而且考虑到老人、孕妇或者有残疾的病人,所存在的不便、费时、费劲等问题日益突出。
家用智能语音垃圾箱的设计与应用
科技风2021年4月科技创新DOP10.19392/ki.1671-7341.202112005家用智能语音垃圾箱的设计与应用党誉豪王廷军张贯尧袁冰磊张梦晨上海电机学院机械学院上海201306摘要:随着垃圾分类的普及,人们希望能够有一种简单、轻松的垃圾分类装置。
为此,设计了一种智能语音控制垃圾箱,由垃圾放入装置、语音识别系统、推杆电机推动垃圾分类装置、垃圾存储装置、垃圾容积检测系统、垃圾消毒系统等组成,采用语音识别垃圾的类别,通过推杆电机推动将垃圾放入相应的垃圾箱內对应储存室,智能语音分类是使用者不需要专业的垃圾分类知识,就能够做到了自动进行垃圾精准分类,实现家庭、小区、单位等的垃圾精确分类回收。
具有操作简单,容错率高的特点,使人们对垃圾分类掌握不准确的问题得以解决。
关键词:智能语音垃圾箱;语音识别;垃圾自动精准分类;精确回收目前,随着生态文明建设和人们环保意识的增强,人们对环保的重视程度也越来越高。
环保是一个永恒的话题,需要我们做的地方还有很多,家庭垃圾分类这件事大家每天都在做,就会逐渐培养好的垃圾分类习惯,更好地增强我们的环保意识。
由于国内垃圾分类开始细化,一些垃圾的分类对于一般人来说很头疼,虽然知道一些简单垃圾的分类,但难以做到全面、细化的掌握,并且对大部分上班族无心记这些东西明细,这样就会导致分类错误、环保压力加大等一些问题。
目前,“垃圾分类”存在的问题主要在于:怎样使垃圾分类的标准统一化并且采取统一奖惩制度;怎样引导相关部门进行垃圾分类宣传;怎样使居民垃圾分类的意识提高,让他们愿意进行垃圾分类;怎样使垃圾分类设备更加全面,使设备技术较得到提升。
其中最后一条正是需要研究的一个难题。
解决以上问题可以采用的方法较多,比如,需要国家政策引导与财政支持,让分类垃圾箱能够更加便捷、快速,让人们觉得垃圾分类不再变得烦琐和复杂。
这也就要求要投入大量财力和人力进行研究如何进行分类垃圾箱的创新,让扔垃圾更便捷。
基于单片机智能语音垃圾桶识别设计
• 192•在中国,垃圾分类正在逐步推广。
但由于垃圾种类繁多,分辨垃圾类别对于普通民众来说不是一件易事,因此提出智能语音识别垃圾桶来便于大众投放垃圾。
该垃圾桶可通过用户说出垃圾名称进而实现分类、垃圾溢满提醒、自动投放的功能。
其中语音垃圾识别功能主要通过LD3320语音芯片识别信息完成,垃圾溢满通过GP2D12测距模块实现,自动投放功能利用L9110芯片控制电机实现。
整体模块利用STC11L08XE 单片机进行控制。
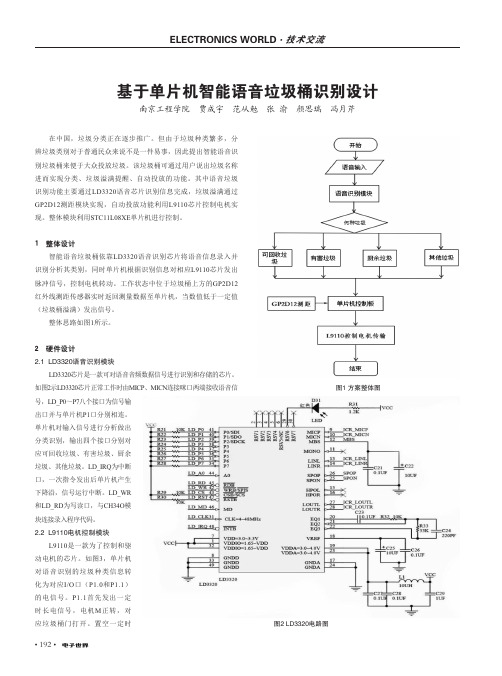
1 整体设计智能语音垃圾桶依靠LD3320语音识别芯片将语音信息录入并识别分析其类别,同时单片机根据识别信息对相应L9110芯片发出脉冲信号,控制电机转动。
工作状态中位于垃圾桶上方的GP2D12红外线测距传感器实时返回测量数据至单片机,当数值低于一定值(垃圾桶溢满)发出信号。
整体思路如图1所示。
2 硬件设计2.1 LD3320语音识别模块LD3320芯片是一款可对语音音频数据信号进行识别和存储的芯片。
如图2示LD3320芯片正常工作时由MICP 、MICN 连接咪口两端接收语音信基于单片机智能语音垃圾桶识别设计南京工程学院 贾成宇 范从勉 张 渝 颜思瑞 冯月芹图1 方案整体图图2 LD3320电路图号,LD_P0~P7八个接口为信号输出口并与单片机P1口分别相连。
单片机对输入信号进行分析做出分类识别,输出四个接口分别对应可回收垃圾、有害垃圾、厨余垃圾、其他垃圾。
LD_IRQ 为中断口,一次指令发出后单片机产生下降沿,信号运行中断。
LD_WR 和L D_RD 为写读口,与CH34O 模块连接录入程序代码。
2.2 L9110电机控制模块L9110是一款为了控制和驱动电机的芯片。
如图3,单片机对语音识别的垃圾种类信息转化为对应I/O 口(P1.0和P1.1)的电信号。
P1.1首先发出一定时长电信号,电机M 正转,对应垃圾桶门打开。
置空一定时• 193•长,垃圾进入对应垃圾桶。
P1.0发出同样时长信号,电机反转,垃圾桶门关闭。
语音垃圾桶课程设计
语音垃圾桶课程设计一、课程目标知识目标:1. 学生能理解并掌握语音识别技术在生活中的应用,特别是“语音垃圾桶”的原理与功能。
2. 学生能够通过学习,了解语音识别的基本流程,包括声音采集、预处理、特征提取、模式匹配等步骤。
3. 学生能够结合环保主题,掌握垃圾分类的基本知识,并将语音技术应用于垃圾分类的实际操作中。
技能目标:1. 学生能够运用所学的语音识别知识,设计并实现一个简易的语音垃圾桶模型。
2. 学生通过小组合作,提高问题解决能力和团队协作能力,能够有效进行任务分配和执行。
3. 学生能够运用信息技术工具,进行数据收集、处理和分析,形成科学的结论。
情感态度价值观目标:1. 培养学生对于科技的兴趣,激发他们对人工智能技术探究的欲望。
2. 增强学生的环保意识,培养他们主动参与环境保护的责任感。
3. 通过实践活动,让学生体会到知识在实际生活中的应用价值,形成积极的学习态度和实用主义价值观。
课程性质分析:本课程设计以综合实践活动为载体,结合信息技术和环保教育,注重知识与实践的结合,提升学生的综合素养。
学生特点分析:考虑到学生所在年级的特点,他们对新鲜事物充满好奇,具备一定的信息技术基础,但需要进一步提高实践操作和团队协作能力。
教学要求:课程应注重理论与实践的结合,鼓励学生动手操作,注重学生个体差异,提供个性化的学习指导,确保每位学生都能在课程中取得进步。
二、教学内容1. 引入新课:介绍语音识别技术的基本概念,通过生活实例引发学生对语音垃圾桶的兴趣。
- 教材章节:第三章《智能语音技术》2. 理论知识学习:- 语音识别技术的基本流程:声音采集、预处理、特征提取、模式匹配。
- 垃圾分类的基本知识:垃圾种类、分类方法及其意义。
- 教材章节:第三章《智能语音技术》、第四章《环保与垃圾分类》3. 实践操作:- 设计并实现简易的语音垃圾桶模型。
- 小组合作,进行任务分配,完成模型搭建和调试。
- 教材章节:第三章《智能语音技术》、第五章《综合实践活动》4. 拓展与应用:- 探讨语音识别技术在生活中的其他应用场景。
语音提醒、防垃圾溢出智能垃圾桶系统总体方案设计
技术平台语音提醒、防垃圾溢出智能垃圾桶系统总体 方案设计田 梅,叶 波(湖北大学计算机与信息工程学院,湖北 武汉 430062)摘 要:本文以单片机为核心,另加上红外检测与语音模块,红外检测用于感应垃圾是否溢出,语音模块用于提醒人们注重垃圾分类并文明将垃圾入桶,保护环境。
本文对此款语音提醒、防垃圾溢出的智能垃圾桶基本构成与实现功能进行了方案设计,具有成本低、系统稳定、功耗较小、智能化等优点。
关键词:单片机;语音提醒;防垃圾外溢;智能垃圾桶0 引言目前,随着我国生活和经济水平提高和人口不断增长,城市生活垃圾每年都在以5%~10%速度增长,如果不能很好处理生活垃圾,会对人们生活环境造成极大不良影响。
虽然目前垃圾处理有不少新途径,比如垃圾发电、垃圾制沼气等,但是垃圾数量庞大以及垃圾种类繁多复杂,要求我们寻找新途径解决这一问题。
其中一个重要问题就是垃圾分类,目前城市中设置的简易型分类垃圾桶,虽然可以分类收集垃圾,但是由于人们环保意识较淡薄未能文明将垃圾扔进垃圾桶,而环保工作人员需要依次检查并清理每个垃圾桶,这种做法效率比较低而且清理垃圾有时不够及时,从而会影响市容并且对我们赖以生存的环境有所损害。
基于这些问题,具有多种功能智能型环保垃圾桶孕育而生。
而由于单片机自从被人们使用以来,以其广泛的应用渗透到人类生活各个层面。
单片机作为一种集成芯片,结构简单,使用方便,实现模式化,控制功能十分强大。
单片机由于以上优势在控制领域、生活智能化仪器领域得到广泛应用。
本设计结合单片机的红外传感器技术、语音处理相关技术设计了语音提示,提醒人们防止垃圾乱扔、垃圾溢出等现象,让垃圾桶更好地起到收集垃圾、清洁环境的作用。
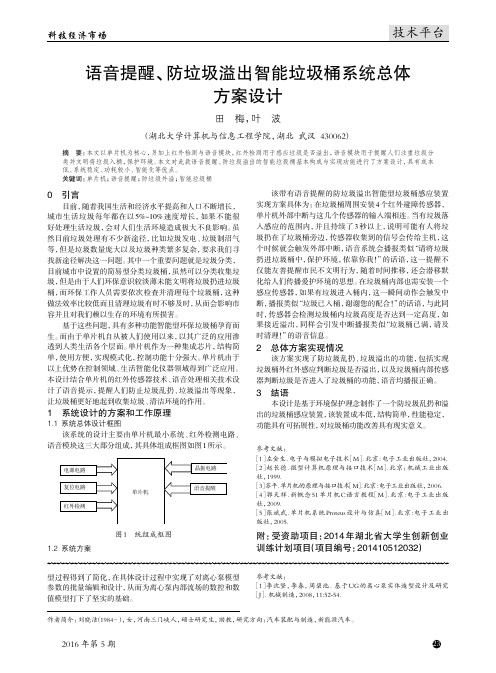
1 系统设计的方案和工作原理1.1 系统总体设计框图该系统的设计主要由单片机最小系统、红外检测电路、语音模块这三大部分组成,其具体组成框图如图1所示。
图1 统组成框图1.2 系统方案该带有语音提醒的防垃圾溢出智能型垃圾桶感应装置实现方案具体为:在垃圾桶周围安装4个红外避障传感器,单片机外部中断与这几个传感器的输入端相连。
智能分类垃圾桶的设计
智能分类垃圾桶的设计在现代社会,垃圾分类已经成为一种全球性的趋势。
为了有效地解决垃圾分类的问题,智能分类垃圾桶应运而生。
智能分类垃圾桶是一种能够自动辨别垃圾类型并进行分类存储的垃圾桶。
它通过高科技技术,可以实现自动识别、智能分类和自动存放,极大地方便了垃圾分类工作,提高了资源再利用的效率。
下面将从技术原理、设计理念和实际应用等方面来详细介绍智能分类垃圾桶的设计。
一、技术原理智能分类垃圾桶的设计离不开一系列高科技技术的支持。
其中包括传感器技术、图像识别技术、智能控制技术等。
通过这些技术的应用,智能分类垃圾桶可以实现自动辨别垃圾类型和自动分类存储的功能。
1.传感器技术:智能分类垃圾桶内部配备了多种传感器,包括重量传感器、红外线传感器等。
这些传感器可以准确地感知到垃圾的重量和形状等信息,从而实现对垃圾的精准识别。
2.图像识别技术:智能分类垃圾桶还内置了高清摄像头和图像识别系统,可以对垃圾进行拍照识别。
通过人工智能技术,智能分类垃圾桶能够实现对垃圾种类的智能识别,并将其自动分类存储。
3.智能控制技术:智能分类垃圾桶还采用了微处理器和智能控制系统,能够实现对垃圾桶的自动控制和管理。
通过这些技术的应用,智能分类垃圾桶可以实现自动分类存储,并能够根据需要进行自动压缩和封存。
这样一来,不仅可以有效地节约空间,还可以减少恶臭和污染。
二、设计理念智能分类垃圾桶的设计理念主要包括便捷高效、环保节能、智能节约空间等方面。
1.便捷高效:智能分类垃圾桶的设计目的是为了方便居民进行垃圾分类,减少人工劳动。
它可以根据垃圾的种类自动进行分类存储,极大地提高了垃圾分类的效率,减轻了人们的劳动负担。
2.环保节能:智能分类垃圾桶能够实现对垃圾的自动分类和存储,有效地降低了因垃圾错误分类导致的资源浪费和环境污染。
这有利于保护环境,减少能源消耗,从而实现了节能环保的目标。
3.智能节约空间:智能分类垃圾桶内置了智能控制系统,可以根据垃圾的数量和种类自动进行压缩和封存,节约了垃圾存放空间。
基于语音识别的智能垃圾桶的系统设计方案-计算机应用技术论文-计算机论文

基于语音识别的智能垃圾桶的系统设计方案-计算机应用技术论文-计算机论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——语音识别论文第三篇:基于语音识别的智能垃圾桶的系统设计方案摘要:阐述基于语音识别的智能垃圾桶的系统设计方案,将智能垃圾桶分为5大功能模块进行设计,此5大功能模块为红外线感测模块、语音识别及播报模块、机械控制模块、远程定位和通信模块,以及外观模块。
要想在智能垃圾桶中应用语音识别技术,还需要设置各功能模块相对应的硬件和软件,通过硬件与软件的共同作用,实现智能垃圾桶各功能模块的正常运行,以此达成语音识别和语音宣导的作用。
关键词:智能,垃圾桶;语音识别;应用;1 概述为更好地解决城市垃圾分类难题,可以借助技术手段来进行垃圾分类工作,以此提高垃圾分类工作的效果与质量。
基于语音识别技术设计了智能垃圾桶的系统方案,此方案既能使语音识别的功能达成,又能使语音播报发挥宣导作用,从而引导扔垃圾的居民正确进行垃圾分类投放的操作。
这对于解决垃圾分类难题有重要作用,能有效推进城市生活垃圾分类工作的开展。
2 系统方案设计在智能垃圾桶中应用语音识别技术的主要目的有两点,(1)进行垃圾名称的识别,比如干垃圾、湿垃圾、有害垃圾等。
(2)垃圾分类知识宣传,通过垃圾分类知识宣传提高人们的垃圾分类意识。
为实现这两大目的,应主要围绕智能垃圾桶的5大功能模块进行设计,此5大功能模块分别为红外线感测模块、语音识别及语音播报模块、机械控制模块、远程定位和通信模块,以及外观模块。
基于此5大功能模块的智能垃圾桶工作流程如图1所示。
图1 智能垃圾桶运行流程第1步:智能垃圾桶通过红外线感测功能感测垃圾桶周边范围内是否有扔垃圾的居民靠近。
第2步:一旦感测到有扔垃圾的居民靠近,就立马会启动语音识别及语音播报和机械控制功能模块。
从而进入交互状态,实现人与智能垃圾桶的交流互动。
第3步:当扔垃圾的居民说出所要扔的垃圾名称后,智能垃圾桶通过语音识别功能对居民所说的垃圾名称进行识别。
智能语音识别分类垃圾桶的设计
智能语音识别分类垃圾桶的设计摘要:垃圾分类处理是我国生态文明建设的重要环节,针对垃圾分类处理中的分类不清问题,设计一种智能语音识别垃圾桶。
该系统以STM32单片机为控制核心,通过超声波模块实现人员监测,使用语音识别模块进行垃圾分类识别,根据识别结果控制对应垃圾桶的开合。
所设计的智能语音识别分类垃圾桶结构简单,使用便捷。
关键词:垃圾桶;语音识别;STM32;智能化0 引言随着城市化进程的加快和经济的快速发展,城市生活垃圾的产生量急剧增加,给环境保护和生态文明建设带来日益增加的承重负担[1-2]。
为了提供更加便利的垃圾分类系统,同时兼顾垃圾分类处理的宣传工作,本文设计一款智能语音识别分类垃圾桶[3-4]。
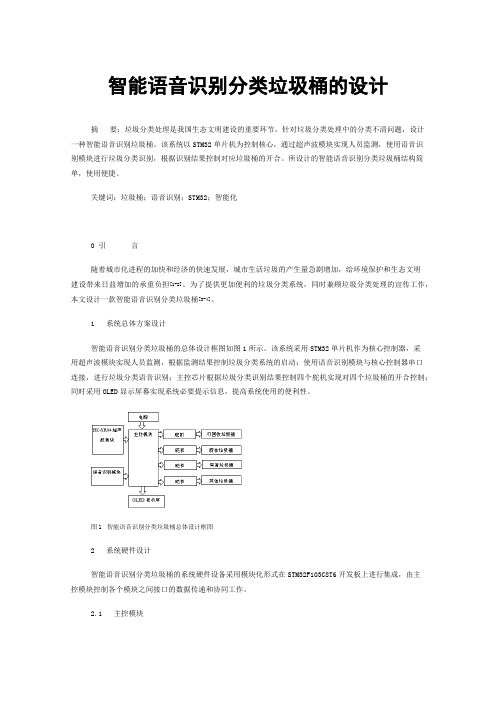
1 系统总体方案设计智能语音识别分类垃圾桶的总体设计框图如图1所示。
该系统采用STM32单片机作为核心控制器,采用超声波模块实现人员监测,根据监测结果控制垃圾分类系统的启动;使用语音识别模块与核心控制器串口连接,进行垃圾分类语音识别;主控芯片根据垃圾分类识别结果控制四个舵机实现对四个垃圾桶的开合控制;同时采用OLED显示屏幕实现系统必要提示信息,提高系统使用的便利性。
图1智能语音识别分类垃圾桶总体设计框图2 系统硬件设计智能语音识别分类垃圾桶的系统硬件设备采用模块化形式在STM32F103C8T6开发板上进行集成,由主控模块控制各个模块之间接口的数据传递和协同工作。
2.1 主控模块主控模块采用STM32F103C8T6最小系统开发板,STM32F103C8T6是一款基于ARM Cortex-M3内核的32位的微控制器[5-6],工作频率72MHz,内置高速存储器、丰富的增强I/O端口和各种通信接口,能够实现与各种输入和输出模块的实时数据传输和处理,满足智能分类垃圾桶的预期功能设计需求。
2.2 语音识别模块LD3320语音识别芯片属于非特定人语音识别,每次识别最多可以设置50项候选识别句,每个识别句可以是单字、词组或短句,长度为不超过10个汉字或者79字节的拼音串。
智能垃圾桶方案设计

设计思路:本智能垃圾桶分为两件组装,及智能垃圾桶与智能垃圾清扫机的结合。
智能垃圾桶采用基于单片机的智能化红外感应控制系统、无线通信系统,实现自动开关桶盖并调节开盖角度、遥控垃圾桶走动、智能封袋的功能。
与传统智能垃圾桶相比较,功能性更强,智能化程度更高。
1 设计思路从垃圾桶的结构和功能出发,主要从垃圾桶外观、分类回收功能、恶臭气味处理、智能翻盖、语音提示等方面进行多功能垃圾桶的设计,力求垃圾桶不仅能满足收集垃圾的功能,而且因其美观,色彩能与周围环境相和谐,成为环境的重要组成部分。
2 分类回收功能设计目前我国城市生活垃圾的成分复杂,含易腐有机物、煤灰、泥沙、塑料、橡胶、玻璃、纸类等,有的生活垃圾中含有电池、金属等,垃圾分类回收是实现垃圾资源化的重要手段。
城市垃圾可分为可回收物和不可回收物2 部分,其中,金属、塑料、玻璃、纸张、木制品等可回收再利用,废旧电池对土壤和地下水污染较重,可设置专门的收集装置回收,集中处理,其他的不可回收的物品可收集后清运至垃圾处理场进一步处理。
可将垃圾桶设置成2 个子桶,一个为可回收桶,涂成绿色,并在显著位置标记可回收标志和字样;另一个为不可回收桶,涂成黄色,标记不可回收标志和字样,在垃圾桶的侧壁处可挂置小的废旧电池回收箱。
3 吸附设计垃圾桶是垃圾临时存放的场所,有机垃圾在垃圾桶内易腐烂变质,散发出恶臭气味,在垃圾桶外壳与内桶间壁处,填充一层活性炭纤维,由于活性炭纤维具有较大的比表面积和较好的吸附性能,可以净化空气,吸附垃圾腐烂过程中产生的恶臭气味,防止空气污染。
4. 自动翻盖由于现行的垃圾桶投放口多在桶身侧面,有些还带有盖门,人们投放垃圾时需要走近或用手开门,这样易对人体造成污染。
设计红外线感应自动开门装置[4],可实现当人走近垃圾桶时,桶门自动打开,投入垃圾后桶门自动关闭,不仅清洁卫生,而且避免垃圾腐烂的恶臭气味逸散到空气中污染环境。
5 语音功能在垃圾桶的集成电路上安装语音模块系统,当人接近垃圾桶投放垃圾时,语音系统会提示对垃圾进行分类投放。
语音控制智能分类垃圾桶的设计与实现
2020年第6期No.6 2020JOURNALOF ANHUI VOCATIONAL COLLEGE OF ELECTRONICS & INFORMATION TECHNOLOGY安徽电子信息职业技术学院学报第19卷(总第111期)Sum No.111 Vol.19摘 要:使用LD3320芯片,将普通垃圾桶与语音识别相结合,实现垃圾分类语音化、智能化。
系统将外部声音信息在模块芯片中进行内部频谱检测,提取关键词并与事先存储在模块中的关键词进行比较和匹配,并控制桶盖打开到相应位置,从而实现垃圾的分类投放。
该设计能有效地帮助用户实现垃圾分类。
关键词:语音识别;智能垃圾桶;垃圾分类中图法分类号:TP368.1 文献标识码:BDesign and Implementation of Voice Control Intelligent Sorting Trash CanWu Hang, Zhao Chuandong, Wu Chengyu, Lin Qinyang, Yang Jiaqi, Wang Xiaoping 语音控制智能分类垃圾桶的设计与实现吴 杭, 赵川东, 吴成玉, 林钦阳, 杨嘉琦, 王晓平(浙江大学宁波理工学院,浙江 宁波 315000)[文章编号] 1671-802X(2020)06-0020-04角度和方向,因此本项目使用步进电机来驱动垃圾桶开盖。
在本项目的众多模块中语音识别和控制是关键功能模块,本项目使用了LD3320“语音识别”专用芯片。
当用户使用此垃圾桶时,说出所投垃圾的相关词汇,例如“玻璃”、“塑料”等,通过语音识别和控制模块,检索LD3320芯片中已经录入的垃圾种类关键词可以将桶盖打开并旋转到相应位置,从而实现垃圾分类投放的目的。
智能分类垃圾桶的原理结构图如图1所示。
图2是实现四种垃圾分类的筒体和桶盖的示意图。
图1 智能垃圾桶原理结构图图2 智能垃圾桶四种分类示意图三、硬件系统设计本系统的主要硬件设备包括STC11L08XE单片机控制系统[2]、LD3320语音识别模块、语音自动打开和关闭桶盖、负责垃圾桶盖开合的ULN2003控制28BYJ-48的4相5V步进直流电机以及9V的电源,电源需要分别给控制板模块和电机模块供电。
一种视觉识别和语音控制并能行走的垃圾桶
2021.17科学技术创新一种视觉识别和语音控制并能行走的垃圾桶任帅廖永盛吕泽然(黑龙江科技大学,黑龙江哈尔滨150027)垃圾桶是一种存放垃圾的容器,在人们生活中有着重要应用,通常人们将垃圾短时间的存放在垃圾桶中,从而保持环境的整洁,同时方便进行处理。
当前,大多数垃圾桶为金属结构,或者塑胶结构,人们在使用过程中会放入塑料袋,在垃圾够多时就一起丢掉。
大多数垃圾桶,在设计时为了防止垃圾的异味四散,影响环境,都设置了桶盖,有些垃圾桶则可以通过脚踏开启。
总的来说,现有的垃圾桶初步满足了人们存放垃圾的需求,但是并不智能,或者智能化程度低。
随着社会的不断发展,智能化水平不断提高,传统的垃圾桶已经不能够完全满足现代人的使用需求,在这样的背景下提高垃圾桶的智能化水平,成为了垃圾桶发展的重要方向。
本文设计了一种具有智能识别、语音控制并且可以行走的垃圾桶,可以更好地满足人们的使用需求,给人们提供更加良好的使用体验。
1智能垃圾桶的设计本文设计了一种具有视觉识别和语音控制并能行走的垃圾桶,主要包括垃圾桶主体、机械爪和垃圾桶主体行走台等部分。
垃圾桶主体安装于垃圾桶主体行走台的顶部,垃圾桶主体由垃圾桶外桶体、垃圾桶内桶体、下位机和伺服电机一组成,所述垃圾桶内桶体的内部设置有四个大小相等且等间距圆周分布的收容室,桶内桶体设置于垃圾桶外桶体的内部。
主体的外部两侧侧面固定安装有机械爪,机械爪上设置有光电传感器,主体的顶部设置有摄像头一,主体的前侧表面设置有摄像头二和上位机。
设计的智能垃圾桶具有自动拾取垃圾,并对垃圾进行判断,实现垃圾分类收集等功能,该智能垃圾桶还设置了移动系统,可以移动和转向,方便本垃圾桶的布设。
智能垃圾桶整体外部侧面结构示意图如图1所示。
图1整体外部结构图垃圾桶主体的后侧安装有出料口盖板,出料口盖板通过伺服电机进行带动实现开合,伺服电机固定于垃圾桶主体上,垃圾桶外桶体的下部侧面上设置有与出料口盖板位置相对应的出料口,垃圾桶内桶体的侧面上设置有与四个收容室一一对应的四个排料口,排料口与出料口位置相对应。
语音分类垃圾桶系统的设计 (2)
学号:24173500133南湖学院毕业综合训练题目:语音分类垃圾桶系统的设计作者刘波届别2017系别机械与电子工程系专业机械电子工程指导老师李锶职称高级实验师完成时间2021年5月诚信声明我声明,所呈交的毕业设计(论文)是本人在老师指导下进行的研究工作及取得的研究成果。
据我查证,除了文中特别加以标注和致谢的地方外,设计(论文)中不包含其他人已经发表或撰写过的研究成果,也不包含为获得其他教育机构的学位或证书而使用过的材料。
我承诺,设计(论文)中的所有内容均真实、可信。
毕业设计(论文)作者签名:年月日毕业设计(论文)指导教师签名:年月日摘要根据当今社会对垃圾分类处理不当和人们对垃圾分类知识缺乏的情况,设计了一款可以使用语音便可自动分类的垃圾桶。
该垃圾桶的主控芯片采用STM32F103RCT6作为控制核心。
电路部分主要包括语音识别电路、电源控制电路、压力检测电路、电机驱动电路和LED报警电路等。
机械部分使用SolidWorks 进行三维设计,主要包括桶盖部分和桶身部分等。
程序控制部分主要包括语音识别模块子程序、电源控制模块子程序、压力检测模块子程序、电机驱动模块子程序、LED报警模块子程序,通过用户口述单个或多个垃圾名,语音识别模块配合电机驱动模块,实现单个或批量的垃圾识别与分类。
通过对语音分类垃圾桶机械部分和程序控制部分的设计与制作,经过多次测试和调节最终实现了语音分类垃圾桶的预期功能。
关键词:语音识别;垃圾分类;STM32AbstractAccording to the improper handling of garbage classification and people's lack of knowledge of garbage classification in today's society, a garbage can that can be automatically classified using voice has been designed. The main control chip of the trash can uses STM32F103RCT6 as the control core. The circuit part mainly includes voice recognition circuit, power control circuit, pressure detection circuit, motor drive circuit and LED alarm circuit. The mechanical part uses SolidWorks for three-dimensional design, mainly including the lid part and the barrel body. The program control part mainly includes voice recognition module subroutine, power control module subroutine, pressure detection module subroutine, motor drive module subroutine, LED alarm module subroutine, and the user dictates single or multiple garbage names, and the voice recognition module cooperates with the motor Drive module to realize single or batch garbage identification and classification. Through the design and production of the mechanical part and the program control part of the voice sorting trash can, after many tests and adjustments, the expected function of the voice sorting trash can is finally realized.Keywords: speech recognition; garbage classification; STM32目录摘要 (I)Abstract (II)1 绪论 (1)1.1研究背景 (1)1.2研究意义 (1)1.3国内外研究动态 (3)1.4研究内容 (5)2 语音分类垃圾桶方案选择 (6)2.1 控制核心的选择 (6)2.2电源控制方案选择 (7)2.3压力检测方案选择 (7)2.4语音识别方案选择 (8)2.5电机驱动方案选择 (8)2.6报警灯方案选择 (8)3语音分类垃圾桶的总体设计方案 (9)3.1 语音垃圾桶预期功能 (9)3.2 设计方案构想 (9)3.3垃圾桶的机械结构设计框架 (9)3.3 语音分类垃圾桶的控制部分设计 (10)4机械部分设计 (12)4.1垃圾桶的设计 (12)4.2垃圾桶整体的设计 (12)4.3板材选择 (14)5 硬件电路的设计 (15)5.1整体概述 (15)5.2最小系统 (15)5.3 压力检测模块 (16)5.5电源控制模块 (17)5.6电机驱动模块 (18)5.7 LED报警模块 (19)6 程序设计 (20)6.1程序主流程图 (20)6.2电源控制模块程序设计 (21)6.3压力检测模块程序设计 (21)6.4语音识别模块的程序设计 (22)6.5电机驱动模块程序设计 (23)6.6 LED报警模块的程序设计 (24)7 系统测试 (25)7.1垃圾桶桶身和桶身控制模块实物连接 (25)7.2垃圾桶语音识别功能测试 (25)7.3电源控制模块测试 (26)7.4满溢检测功能测试 (27)8结论 (28)参考文献 (29)致谢 (30)1 绪论1.1研究背景传统的垃圾收集模式既是严重地制约了我国环境和社会经济发展的障碍和瓶颈之一,又是导致环境污染和资源不能被再利用的主要因素。
智能垃圾桶的语音识别及监控系统设计
智能垃圾桶的语音识别及监控系统设计摘要:设计一款基于WeMos D1物联网开发板的智能垃圾桶,以实现对垃圾桶的远程及现场的控制,满足对垃圾分类的语音识别,并通过阿里云物联网平台实现对桶内垃圾容量的准确监控。
硬件部分包括WeMosD1物联网开发板、HC-SR04超声波传感器、LDV7语音识别模块以及称重传感器;软件部分包括开发板的Arduino程序及语音识别模块的单片机程序,并通过阿里云的IOT Studio实现自建手机App。
本系统的开发实现了硬件设计和软件编程,该系统能够对桶内垃圾容量进行实时监控,在容量超过上限时可通过云平台或手机APP发出报警信息提示环卫人员。
智能垃圾桶的监控系统能够及时地提醒环卫人员,使垃圾桶的清理更加便捷,节省了人力物力。
关键词:物联网;语音识别;数据采集;远程监控;云平台引言《海南省生活垃圾管理条例》中明确要求自2020年10月1日起正式实施垃圾分类,而大部分传统垃圾桶需要居民手动进行分类,且城市垃圾居多已对环境卫生造成严重压力。
随着物联网技术的快速发展,通过传感器采集相关的数据信息,并发送到物联网云平台进行存储、分析及处理,而获取的大量关键数据被广泛应用于智慧城市及智能环境监测,其大为改善了人们的社会生活状态,所以有必要在城市垃圾桶中运用物联网技术[1]。
综上所述,本文设计了一款能够实现语音识别及实时监控垃圾容量的智能垃圾桶,可以满足居民方便快捷地通过语音识别进行垃圾分类和及时通知环卫人员回收垃圾。
1系统设计本文设计的智能垃圾桶监控系统基于物联网平台,主要实现的功能为:第一,利用语音识别模块和超声波传感器以实现对现场垃圾桶盖的自动开合;第二,利用称重传感器采集垃圾桶内的垃圾重量,并将该数据通过无线通信技术上传至云平台;第三,在云平台上设定相关阈值以实现远程控制现场垃圾桶盖的开合,并将垃圾桶信息推送至移动端以提醒环卫人员及时回收垃圾。
系统整体框架如图一所示。
图一系统整体框架为了满足本系统设计的具体功能,该系统的组成主要分为:终端、云端和移动端。
基于声源定位的智能移动垃圾桶及其系统的制作方法
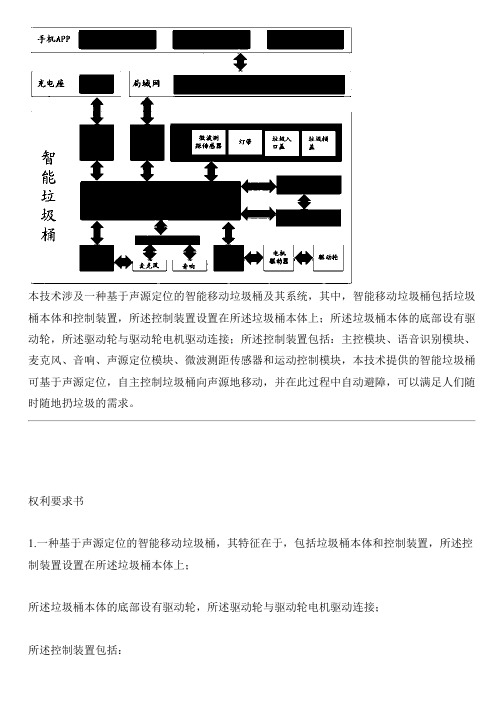
本技术涉及一种基于声源定位的智能移动垃圾桶及其系统,其中,智能移动垃圾桶包括垃圾桶本体和控制装置,所述控制装置设置在所述垃圾桶本体上;所述垃圾桶本体的底部设有驱动轮,所述驱动轮与驱动轮电机驱动连接;所述控制装置包括:主控模块、语音识别模块、麦克风、音响、声源定位模块、微波测距传感器和运动控制模块,本技术提供的智能垃圾桶可基于声源定位,自主控制垃圾桶向声源地移动,并在此过程中自动避障,可以满足人们随时随地扔垃圾的需求。
权利要求书1.一种基于声源定位的智能移动垃圾桶,其特征在于,包括垃圾桶本体和控制装置,所述控制装置设置在所述垃圾桶本体上;所述垃圾桶本体的底部设有驱动轮,所述驱动轮与驱动轮电机驱动连接;所述控制装置包括:主控模块;语音识别模块,与所述主控模块电连接,用于对外界的语音进行解析,并执行正确的指令;麦克风,与所述语音识别模块电连接,其用于接收外界的语音执行指令;音响,与所述语音识别模块电连接,其用于将指令执行的结果反馈给外界,或发出语音信息提示;声源定位模块,分别与所述主动模块和麦克风电连接,用于将所述麦克风接收的声音信号进行数字信号处理,分析得到声源的位置信息;微波测距传感器,与所述主控模块电连接,用于检测运动方向是否有障碍物;运动控制模块,与所述主控模块电连接,用于根据所述声源定位模块反馈的位置信息和所述微波测距传感器反馈的避障信息,确定行进方向;驱动轮电机驱动器,分别与所述运动控制模块和驱动轮电机连接。
2.如权利要求1所述的基于声源定位的智能移动垃圾桶,其特征在于,所述垃圾桶本体上设置有触摸屏,所述触摸屏与所述主控模块电连接,用于显示垃圾桶的状态信息以及垃圾桶的相关操作。
3.如权利要求1所述的基于声源定位的智能移动垃圾桶,其特征在于,所述垃圾桶本体的上开口上转动设置一垃圾桶盖,打开此垃圾桶盖可更换垃圾袋;所述垃圾桶盖与第一电机驱动连接,所述第一电机通过第一电机驱动器与所述主控模块电连接;所述垃圾桶盖上还设置用于感应垃圾袋是否被拿走的第一传感器,所述第一传感器与所述主控模块电连接;所述垃圾桶盖上开设一垃圾入口,所述垃圾入口上转动设置一垃圾入口盖,所述垃圾入口盖与第二电机驱动连接,所述第二电机通过第二电机驱动器与所述主控模块电连接;所述垃圾入口盖上还设置一用于感应垃圾是否扔入垃圾桶内的第二传感器,所述第二传感器与所述主控模块电连接;所述垃圾桶盖内侧还设有垃圾袋和可用于对垃圾袋进行塑封并截断完成换垃圾袋动作的塑封装置,所述塑封装置与所述主控模块电连接。
语音识别垃圾桶的原理
语音识别引领垃圾分类冲锋路随着城市化进程的加速和人口的增长,城市垃圾的数量和种类也在快速膨胀,而且分类不清的垃圾不仅难以回收利用,而且还会对环境造成严重污染。
为了有效应对这一问题,一种新型的技术——语音识别垃圾桶应运而生,它是一种将语音识别技术与智能垃圾桶相结合的新型产品,能够有效的提高城市垃圾分类的准确性和高效性。
语音识别垃圾桶是如何工作的呢?首先,它通过语音识别技术,能够识别并判断居民投放的垃圾类型,包括可回收物、有害垃圾、厨余垃圾等等。
其次,在识别出垃圾类型之后,它会根据不同的垃圾类型,自动开启相应的垃圾桶盖,进行投放。
这种技术的应用不仅可以提高垃圾分类的准确性和高效性,而且还可以方便居民的使用,减少投放垃圾的时间和操作难度。
特别是在老年人和残障人群中,更能够提高垃圾分类的可行性和可持续性。
除此之外,语音识别垃圾桶也具有一定的智能化,它可以通过连接互联网,实现智能信息管理和数据统计。
在这个过程中,它可以为政府部门提供相关数据,帮助政府制定更好的垃圾分类政策,同时也可以为相关企业提供更为精准的市场分析和数据支持。
总之,语音识别垃圾桶的应用,不仅为城市垃圾分类带来了一种革命性的机遇,也为人类的环境保护和可持续发展迈出了一大步。
未来的垃圾分类道路一定会更加顺畅和高效,而语音识别垃圾桶,则必将成为垃圾分类冲锋路上的一颗耀眼的明星!。
浅谈一种智能家居垃圾桶的设计
1 背景 随着高新技术的不断发展,各行各业呈现出一种智能化的
趋势,智能家居、智慧城市、智能物流的出现极大地改善了人 们的生活,为人们带来了便利[1]。垃圾桶作为生活中必不可少 的家居用品,市面上产品却良莠不齐、功能模式单一、无法满 足人们的日常生活需求,因此设计一款基于语音控制、随叫随 到、智能打包的多功能垃圾桶,创造一个安全、舒适、幸福的 家居环境。
NFORMATION
浅谈一种智能家居垃圾桶的设计
张瑞丹 房新月 李银轮(通讯作者) 青海师范大学 青海 西宁 810000
摘 要 对一款具有语音控制、智能开关盖、超声波避障、自动打包和夜灯功能的家居垃圾桶进行原理分析及流程 图展示,赋予垃圾桶多功能应用,旨在提高居民生活品质。 关键词 垃圾桶;语音识别;超声波避障
参考文献 [1] 朱骏军,汪昀.创新创业教育背景下高职教师信息素养提升的思
考[J].宁波职业技术学院学报,2017(1):45-47.
作者简介 何雷(1987-),男,湖南岳阳人;学历:硕士研究生,职称:
工程师,讲师,现就职单位:柳州铁道职业技术学院,研究方向:铁道 车辆技术。
(上接第176页)
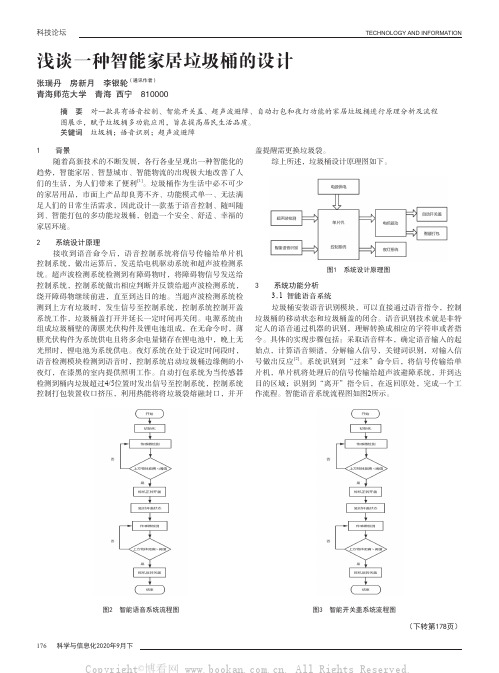
3.2 智能开关盖系统 在垃圾桶盖上方安装有超声波检测模块,当检测到垃圾桶 上方有垃圾处于阈值内时,桶盖打开并延迟一定时间,再次检 测到上方阈值内无障碍物时,桶盖关闭。流程图如图3所示。 3.3 超声波检测系统 超声波检测系统包括检测系统与避障系统两部分,检测系 统为自动开关盖服务,避障系统工作于定位与行走。在垃圾桶的 前、左、右方均设置有超声波检测,当有障碍时,超声波检测模 块会将信号反馈给单片机,单片机依据收集的信号做出反馈。单 片机发出命令给电机系统,控制行走方向直至到达目的地。 3.4 自动打包系统 桶内剩余空间可通过超声波测距计算得到[3]。计算得出桶 内剩余容量仅为垃圾桶容量的1/5处时,将此信号输送给单片 机,单片机控制桶口处的传动丝杠,带动两个电热棒向中间移 动,处于中间位置相互接触时,开始加热电热棒的热熔薄片, 加热一定时间后停止加热,在电热棒相互挤压和加热的过程 中,垃圾袋局部熔融并黏结在一起,封口打包完成。之后将完 成的信息传送给单片机,单片机控制垃圾桶开盖提醒用户需要 更换垃圾袋。 3.5 夜灯系统 夜灯在黑夜起照明作用,减少夜间家庭电力能源消耗。在 晚上23:00至凌晨5:00期间内,智能语音系统接收到语音后启 动夜灯系统,位于桶底部的夜灯开启并持续5分钟之后关闭,夜 灯灯光柔和适中、不会影响家人睡眠、方便夜间生活。 3.6 电机驱动系统 单片机收集到各个信号时,进行运算并做出反应输送给电 机驱动系统。电机驱动系统在自动开关盖系统中控制垃圾桶的 开关盖功能;在超声波避障系统中控制垃圾桶的前进轨迹,可 实现前行、后退、左拐、右拐功能;在自动打包装置中控制电 热棒的移动以便封口打包。 3.7 电源系统 薄膜电池组件具有转化效率高、光吸收能力强、弱光性 好、衰退少的特点,故采用薄膜电池与垃圾桶壁相结合组成
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
合泰杯单片机应用设计竞赛初赛报告书参赛编号:20160415 学校:重庆机电职业技术学院作品名称:采用语音定位技术的随叫随到智能垃圾桶指导老师:_____________________ 杨川 _____________________参赛队员:_________ 向游李曼芸汤玲_______采用单片机型号:HT66F70A_______________________日期:2015年12月30日一、摘要随着社会经济的不断发展,智能控制技术日益成熟。
现代家居中,人们越来越注重各种电器家具布局的智能化,合理化,科学化以及人性化。
本作品旨在设计一款基于HT66F70A单片机控制的智能家居垃圾桶,该智能垃圾桶采用声音和红外传感器,通过延时估计法实现声源方位的实时检测,具有语音控制垃圾桶行进功能和红外避障功能,同时,智能垃圾桶能快速识别用户发出的各种语音指示,自动完成开启、关闭垃圾桶等动作,真正实现随叫随到,为人们的日常生活带来便利。
本作品完成之后能够很好的管理垃圾桶满足用户的要求,符合科技型、可持续性发展社会的标准。
关键词:HT66F70A声源定位;语音识别;红外式传感器二、作品介绍2.1作品背景随着中国城市和经济的迅速发展,人们的生活水平不断提高,人们在生活中产生的生活垃圾都需要垃圾桶放置,特别是老人、妇女或者残疾人,放置垃圾时存在的诸多不便、费时、费力等问题,提出了具有语音识别功能的智能垃圾桶设计方案,当用户想要扔垃圾时,只要一声令下,垃圾桶就会快速准确到达身边。
同时为了符合节约型、可持续性发展社会的标准,产生了对垃圾桶智能管理的需求。
传统垃圾桶存在占用室内面积,堵墙角过道,远程操控不变,不卫生等现象。
对于占用面积问题和不便捷问题,都是可以通过智能管理来完美解决的。
2.2创作目的为了在满足用户前提下最大限度的省时省力,解决垃圾桶使用便捷的问题,我们设计了一个语音识别系统,来控制垃圾桶的工作状态。
生活中人们都需到一定的垃圾桶放置处扔垃圾,而且考虑到老人、孕妇或者有残疾的病人,所存在的不便、费时、费劲等问题日益突出。
针对此问题,本系统提出了具有“随叫随到”功能的垃圾桶的设计方案,即当用户想要扔垃圾的时候,只要一声令下,垃圾桶就会快准确无误地来到身边。
并且设计出了一套基于HT66F70A控制的具有语音识别技术的声控智能垃圾桶,实现了对其“随叫随到”的控制。
三、作品功能与实用性设计的作品系统结构包括垃圾桶车体机械结构、硬件控制电路和软件设计三部分。
其中车体机械结构为一部带万向轮的两轮驱动车体,能按照在不同地点处用户发出的声音指令,自动行驶到用户所在地。
本设计通过语音识别模块识别出用户的呼叫命令,同时通过声源定位模块判断用户所处位置,再通过HT66F70A产生驱动电机的PWM信号,利用电机驱动模块驱动垃圾桶向声源方向行驶,并在行进过程中,利用避障模块自行避开障碍物。
同时,该设计还支持用户对打开垃圾桶盖、关闭垃圾桶盖等语音控制。
该设计将智能、便利、个性化融合在一起,为新时代的家居生活和高效率的办公带来方便、快捷和可靠。
四、设计原理4.1作品工作原理本系统采用盛群提供的高性能、低功耗的处理器HT66F70A芯片为核心控制器。
系统包括电源模块、HT66F70A最小系统、声源定位模块、语音识别模块、避障模块和电机驱动模块。
各个模块功能阐述如下:声音采集:由拾音器声音传感器采集声音,通过两级放大电路对语音信号进行放大。
语音识别:Philips公司UDA1341TS专用的语音处理芯片,能对语音实现放大、滤波、采样、A/D或D/A转换及进行数字语音处理功能。
电机驱动:由HT66F70A产生PWM控制信号驱动电机工作。
避障:以红外式传感器探测障碍距离并采用漫反射式光电开关进行避障。
通过对采集的声音加以数字语音处理,将输人的语音信号经过音频数字信号编译码 器UDA134仃S 处理后,与保存在Flash 中的参考样本进行对比,找出最佳的声音识别 效果,然后由调用函数控制 HT66F70A 的I /0 口,指挥垃圾桶的运动。
电机的驱动电路则采用H 桥驱动电路,控制4个桥臂的导通与关断控制电机的运行状态, 使之正转反 转或者停转,进而控制垃圾桶的行驶。
根据红外探测器发射头发出的光束,被障碍物反 射,接收头据此做出判断是否有障碍物。
HT66F70A 根据接收头电平的高低做出相应控制,避免小车碰到障碍物。
最最 最最 最 最图1系统整体框图4.2声源定位算法针对声源定位,系统采用基于传声器阵列时延估计法来估测用户发声的方向。
基于 时延估计的声源定位算法分为两个部分:(1)时延估计,即计算声源到两两传声器之间 的时间差。
⑵ 方位估计,即根据时延和传声器阵列的几何位置估计出声源的位置,其 中时延估计的精度是关系到声源定位精确与否的关键因素。
(1)时延估计时延估计采用广义互相关法。
假设两传声器 m1和m2间距为d ,在没有混响的情况下,两传声器接受到的信号x 1 t 和x 2 t :其中,St 为声源信号;:'1、- 2是声波从声源到传感器的传播衰减系数;•是声 源传播到h - 曰曰曰曰 最最最最 —曰曰曰曰曰曰 最最最最最最 曰曰曰曰曰 最最最最最__________ 1曰曰曰曰曰曰 最最最最最最 J 曰曰 最最X 1 t 二 a 1S t mt(1)两个传感器所需延迟时间,即到达时延。
n i t、n2 t为环境噪声。
这时,到达时延(TDOA可以采用传统的互相关法进行估计,这时互相关方程为RX1X2 =「12 • ■ G xix2 • ■ e j d,0=x2 • ■.(3)其中G xix2 •■二EX xl「[是传声器1、2拾取信号的互相关谱';是权函数;^x2「°F「Gx^「是广义互相关谱,这样到达时延为根据上式选取不同的权函数‘12「就可得到到达时延的不同算法,它的选取可根据实际的声学环境选择相应的准则,使得R x1x2有个比较尖锐的峰值,得到最好的估计效果Rx^ •。
的峰值处即为两传声器间的时延。
但在实际应用中,权函数的选取是一个难点。
目前用得较多的是基于互功率谱相位加权(CSP)法,其中加权函数选为幻2""^®L这种方法通过对信号互功率谱的归一化,去除了信号的幅度信息,只保留了信号的相位特性,对于噪声和混响都有一定的抑制效果。
(2)方位估计采用几何定位法,利用角度距离估计方位。
利用两个拾音器摆成如图2所示,利用拾音器1和2接收到得时间差就可以检测出声源偏离主轴的角度9 o由图2可得.AC)-:-arcsin - AB ⑷AC = ( t A —t B ) V 声音(5)由于AB距离和V声音已知,时延(t A 一t B)可由式(1)〜式⑶ 算出,再由式⑷ 和式(5)可求得声源偏移正方向的角度9,则可控制电机转动使垃圾桶向用户方位旋转并前进。
4.3特定语音识别算法针对特定语音的识别,采用动态时间规整(DTW)的算法,是一种把时间规整和距离测度的计算结合起来非线性规整技术,多用于孤立词的语音识别。
首先应滤掉输入语音信号的噪音并进行预加重处理,提升高频分量,然后线性预测系数等方法进行频谱分析,找出语音的特征参数作为未知模式,与预先存储的标准模式进行比较,当输入的未知模式与标准模式的特征一致时,HT66F70A便识别输入的语音信号并输出结果。
五、实作设计结构5.1硬件部分系统硬件电路总体结构框图如图3所示,包括电源模块、HT66F70A最小系统、声源定位模块、语音识别模块、避障模块和电机驱动模块。
图3:系统总体结构框图5.1.1声源定位模块声源定位模块主要包括拾音器构成的麦克风阵列和信号处理单元。
系统中麦克风阵列选用2个拾音器来实现,其监听范围为20〜30m2由于拾音器所拾取的声音信号太小,易受环境噪声影响,因此有必要对声音信号进行预处理,通过信号调理单元的处理,使其能够满足系统要求。
为了能够将拾音器输出的微弱电信号有效放大,系统采取两级放大电路。
由于A/D模块不能采集负电压信号,因此需要对放大后的电信号进行偏置,使其不出现负电压,便于HT66F70A采样,使其输出的误差更小。
5.1.2语音识别模块设计采用Philips公司UDA1341T专用的语音处理芯片,能对语音实现放大、滤波、采样、A/D或D/A转换及进行数字语音处理功能,并且支持IIS总线数据格式,与HT66F70A 内置IIS总线接口配合使用。
HT66F70A芯片上内置的IIS接口不但能够读取IIS总线上的数据,为FIFO数据提供DMA勺传输模式,而且可以同时传输和接收数据。
UDA1341TS 对所采集的语音信号进行采集和编码,由DTV模型算法进行模板训练,并将训练结果存储在Flash中以便于在语音信号识别阶段读取模板。
在语音信号识别阶段,将输人的语音信号经过音频数字信号编译码器UDA1341T处理后,通知HT66F70A与保存在Flash 中的参考样本进行对比,找出最佳的声音识别效果,然后由调用函数控制HT66F70A的I/O 口,指挥垃圾桶的运动。
5.1.3电机驱动模块电机驱动模块根据HT66F70AS制器输出的控制信号驱动电机的运行。
由HT66F70A 产生两路PWM波,通过L298N电机驱动芯片控制两个直流电机,分别驱动左轮和右轮。
直走时两路PWM波频率相位相同,当需要转弯时,改变PW波控制相应的电机反转,另一电机正转。
两边形成差速即可实现转弯。
调整反转的的时间,可以控制转弯的大小和快慢,改变PWM 波的占空比可以控制小车的速度.O3D--=■OTP-图4:电机驱动模块电路图5.1.4避障模块避障电路采用漫反射式光电开关进行避障。
光电开关是集发射头和接收头于一体的检测开关,其工作原理是根据发射头发出的光束,被障碍物反射,接收头据此做出判断是否有障碍物。
当有光线反射回来时,输出低电平;当没有光线反射回来时,输出高电平。
HT66F70A艮据接收头电平的高低做出相应控制,避免小车碰到障碍物,由于接收管输出TTL电平,有利于HT66F70A寸信号的处理。
障碍检测模块作为对外部障碍信息的采集窗口,将行进过程中障碍信息检测出来,并传递给HT66F70A空制器进行处理。
图5:避障模块电路图5.1.5 HT66F70A 最小系统以盛群公司的HT66F70A微处理器为核心控制器,其主要作用:接收和处理收到的各种传感器信号,并通过决策后输出合适的控制信号。
利用HT66F70A丰富的片上外设可以方便地采集和处理各种传感器的信号,实时控制垃圾桶的运动,同时完成与语音芯片UDA134仃之间的通信。
5.2软件部分5.2.1系统整体软件设计系统软件主要包括:数据采集模块、通讯模块、特定声源定位算法模块和避障软件模块。