第二章下直流提升机调速系统控制
矿井提升机直流调速系统

矿井提升机直流调速系统摘要矿井提升机也称矿井卷扬机,是煤炭、有色金属矿石等生产过程中的大型关键设备,也是井上和井下的唯一输送通道。
提升机主要用于升降人员和矿石、煤炭等,其性能和安全可靠性直接影响着煤炭、矿石的生产及作业人员的生命安全,一旦发生事故必然导致人员伤亡和设备的严重损坏,矿山正常生产中断,造成重大的经济损失,素有“矿山咽喉”之称。
矿井提升机种类繁多,按照井道结构分,有立井与斜井;按照传动电机分,为交流传动和直流传动提升机;按容器功能分,则有箕斗和罐笼;按钢丝绳结构方式分,则有单绳和多绳摩擦轮提升机:按矿井功能分为主井(输送矿产品)与副井(输送人员与材料等);按提车点的多少分为单水平和多水平提升机。
纵观电气传动系统的发展历程,它经历了从恒速到调速,从低性能到高性能,从单机独立运行到多机系统控制等发展过程。
随着技术的发展,对电气传动在起制动、正反转以及调速精度、调速范围、静态特性、动态响应等方面都提出了更高的要求,这就要求大量使用调速系统。
在工程实践中多有许多生产机械要求在一定的范围内进行速度的平滑调节,并且要求有良好的静、动态性能。
本文中讲到的主要是矿井提升机的双闭环直流调速系统Mine Elevator also said the mine hoist, coal, nonferrous metal ores and other large-scale production process key equipment is the only aboveground and underground transmission channel. Mainly used for lifting personnel hoist and ore, coal, performance and reliability of its direct impact on the coal, ore production and the lives of workers in case of accidents will inevitably lead to casualties and serious damage to the equipment, mining normal production Interrupted, resulting in significant economic losses, known as "mine throat, "said. A wide range of mine hoist, shaft structure in accordance with points, a shaft and shaft; in accordance with the drive motor points for the AC drive and DC drive machine; feature points by the container, there are skip and cage; by way of sub-rope structure, the A single rope and hoist Friction wheel: function points by the main mine shaft (transmission minerals) and the auxiliary shaft (transportation of personnel and materials, etc.); point by mentioning how many cars are divided into single-level and multi-level elevator. Throughout the course of development of electric drive systems, it has undergone from the constant speed to the speed, from low performance to high performance, from single to multi-machine system independently control the development process. As technology advances, the effect of the electric transmission brake, reversing and speed control accuracy, speed range, the static characteristics, dynamic response, etc. have put forward higher requirements, which requires extensive use of speed control system. In engineering practice there are many more requirements of production machinery within a certain speed ramp, and requires good static and dynamic performance. Mentioned in this article are mainly of mine hoist Double Loop DC Speed Control System!矿井提升机直流调速系统中,为了实现在允许条件下最快起动,关键是要获得一段使电流保持为最大值的恒流过程。
副井提升机直流调速系统的设计
引言刮板输送机、提升机以及带式输送机等均为煤矿生产的关键运输设备,对于上述设备而言其电控系统的稳定性和安全性直接决定综采工作面的运输能力,继而影响整个煤矿的生产能力。
经实践应用及调研可知,提升机传统电控系统存在故障率高、线路老化严重、系统能耗较大、维护困难以及维护成本高等缺陷[1],因此,为满足当前煤矿综采工作面高效开采现状,需从根本上提高提升机的运输能力和运输效率。
本文将从提升机电气控制系统着手将传统电控系统改进为直流调速系统。
1提升机电控系统的设计要求根据《煤炭安全规程》的相关要求,要求提升机电气控制系统对设备的速度控制曲线满足生产要求。
因此,对提升机电气控制系统提出如下要求:1)提升机能够根据其实时负载进行电动或者制动状态的控制,即其满足四象限运行的能力;2)要求提升机电气控制系统能够实现平滑调速,并根据运输对象的不同进行分等级运输,且要求其具有较高的提升能力;简单地说,对提升机传统电气控制系统的改造,主要目的是对提升机速度控制功能进行优化,对其自适应速度控制提出更高的要求,在保证其在实时载荷下正常工作的同时,达到降低能耗、平稳调速的目的,并且改造后提升机电气控制系统的维护成本可以降低。
在当前多种调速方式优劣势的综合比对下,本文拟采用直流调速系统对传统电控系统进行升级改造。
2提升机直流调速系统的设计基于直流调速系统实现提升机速度与电流的双闭环控制,以达到对提升速度控制的精确性和稳定性。
本文所采用直流调速系统的核心装置为全数字化直流调速装置,该装置可根据现场情况对提升参数进行设定;根据提升参数的采集完成对给定值和反馈的设定,其中可采用模拟量和数字量同时对输入量进行设置;具有较高的检测精度;基于全数字化直流调速装置在实现其与其他调速装置进行通信的要求外,还可与上位机和PLC 控制器等实现通信;基于全数字化直流调速装置可实现对提升机系统运行参数的状态显示、监控以及报警等功能[2]。
针对提升机直流调速系统的控制需求,本文所选择的全数字直流调速装置的具体系列为DCS 系列,且为实现其四象限调速控制功能,最终所选全数字直流调速装置的系列为DCS600。
矿井提升机控制系统
第一章概述第一节提升机电力拖动的特点及对拖动控制装置的要求矿井提升机(又称绞车、卷扬机)是矿井生产的关键设备。
提升机电控系统技术性能如何,将直接影响矿井生产的效率及安全。
欲掌握提升机电控系统的原理,首先要了解提升机对电控系统的要求,以及各种电气传动方案的特点。
矿井提升机为往复运动的生产机械,有正向和反向提升,又有正向和反向下放。
对于不同水平的提升,在每次提升循环中,容器的上升或下降的运动距离可能是相同的,也可能是不同的。
在每一提升周期都要经过从起动、加速、等速、减速、爬行到停车的运动过程,因此提升机对电控系统一般有下述一些要求。
1、要求满足四象限运行设提升机正向提升时,拖动电动机工作在第一象限。
而在减速下放时,如果是正力减速,拖动电动机也工作在第一象限,但如果为负力减速,则拖动电动机就工作在第二象限。
同样当提升机反向提升时,拖动电动机工作在第三象限。
而在减速下放时,如果是正力减速,拖动电动机也工作在第三象限,但如果为负力减速,则拖动电动机就工作在第四象限。
因此,提升机的运行必须能满足四象限运行的要求。
2、必须平滑调节速度且有精度较高的调节精度提升工艺要求电控系统须能满足运送物料(达到额定速度)、运送人员(可能要求低于额定速度)、运送炸药(2m/s)、检查运行(0.3~1.0m/s)和低速爬行(0.1~0.5m/s)等各种要求,所以要求提升机电控系统必须能平滑连续调节运行速度。
对于调速精度,为了在不同负载下的减速段的距离误差尽可能地小,要求提升机的静差率s越小越好(一般在高速下s<1%)。
这样可以使爬行段距离尽可能设计得小,来减少低速爬行段的时间,从而缩短提升周期,获得较大的提升能力。
3、要求设置准确可靠的速度给定装置提升工艺要求电控系统的加减速度平稳。
根据安全规程,对矿井提升机的加、减速度都有一定的限制。
对竖井来说,提物时加减速度小于1.2m/s2;提人时加减速度小于0.7m/s2;对斜井,提人时加减速度小于0.5m/s2。
全数字直流提升机的调试2

任务二全数字直流提升机电气控制系统的调试【提要】(一) 矿井直流提升机全数字调速电控系统的特点1.硬件结构简单,故障点少,可靠性高2.可控精度高,工作稳定性好3.容易实现先进的控制算法4.故障自诊断能力强,大大降低使用维护成本5.具有较高的可构置性,扩展方便,运行灵活性高矿井直流提升机全数字调速电控系统相对于模拟系统有如下特点:1.硬件结构简单,故障点少,可靠性高2.可控精度高,工作稳定性好3.容易实现先进的控制算法4.故障自诊断能力强,大大降低使用维护成本5.具有较高的可构置性,扩展方便,运行灵活性高6.可与其它系统联网,实现现代化管理7.性能价格比高8.可与其它系统联网,实现现代化管理(二)全数字直流调速系统电路组成及工作原理1.全数字直流提升机电控系统的构成全数字直流提升机电控系统从原理上分主要由供电主回路、全数字调速系统、系统操作保护、上位机监控、装、卸载控制系统和操作台和监视器等六部分组成,如图3-30所示。
1)主回路由高压配电系统、整流变压器、晶闸管整流装置、快开、电抗器等构成,采用电枢电流换向(电枢可逆),磁场电流单向的方式;也可采用电枢电流单向、磁场电流换向的方式。
为减少电网的无功冲击的高次谐波的干扰,电枢回路配置成串联12脉动顺控。
2)全数字调速系统全数字调速系统主要由全数字调速装置和晶闸管整流装置组成。
通常有两种配置方式,一种是调速装置和晶闸管装置全部采用进口件;另一种是采用进口的小型全数字调速装置,配置国产的晶闸管功率单元。
随着国产晶闸管质量提高,这种配置比较常用,特别对于较大容量的提升机,性能价格比优良,使用效果好。
根据用户实际需要,晶闸管装置可以配置成6脉动、串联12脉动或并联12脉动如图4-31所示。
对于12脉动,当一组晶闸管装置发生故障情况下,可以切换成6脉动运行。
一般情况下,功率在1500kW以下主回路建议采用电枢可逆,1500kW以上采用磁场可逆。
随着单只晶闸管容量的增大,功率大于1500kW的场合,有将主回路设计成电枢可逆的趋势。
提升机直流全数字电控系统的行程和速度控制

电气设备技术管理工作。
维普资讯
第 4期
盛 飞 霞 : 升机 直流 全数 字 电控 系统 的行 程和 速度控 制 提 个采 掘 中段 、 它特 殊位 置 。 其
6 3
由此 , 提升 机 操作 功能 在 主控 台方 便 地 实 现 提 升机 的操 作 , 行矿 山提升 作业 。 进
要 : 升机直流全数字电控系统是 目前我国较为先进 的提升机控 制系统 , 提 具有调 速性能好 、 安
全可靠 、 节约能源 、 设置灵活等优点 , 而行程 、 速度控制是提升机的核心控制功能 。文章 以国外某矿 山的提升机控制系统为例 , 分析 、 介绍该 系统 的行程 、 速度控 制原理 和方法 , 以及实际应用效果 。
置 、 改速度 曲线 等 , 合 矿 山滚 动 开 发 、 活 多 变 修 适 灵
该 矿 的直流调 速 柜 由两 套 AB B公 司 的 D S 0 C60 型直 流调速 装置 、 B A B配 套励磁 调节 器 、 内制作 的 国 整流 方式切 换柜 组成 , 形成 了完整 的直 流 串联 l 2脉 动 主丛 调 速 单元 , 实 现 四 象 限 的提 升 机 控 制 。该 可
程中不会造成对矿 山电网的剧烈冲击 , 尤其适合小
容量 矿 山电 网。
P C 型号为 C U 1 L( P 34及输入/ 出模块 ) 输 为核心 , 两 套 P C形成 总线冗余 、 L 备用充分 的结构 , 实现对提 升机直流调柜 、 提升机安全回路 、 辅助设备等 的全面
控制。 两台 S 7系列 P C装在 主 控 台 内 , 外 , L 此 主控 台
关 键 词 : 升机 ; 提 电控 系统 ; 度 ; 速 行程 ; 制 控
提升机转子变频调速控制系统

子接入变频调速 电源装置供 电, 达到 高压 绕线电机利用低压变频 电源装置, 实现无极调速 , 解决 了高压 电机 变频控制 问题 , 使设备 运行更加 经
济、 速度调节平滑 , 制动性能更加安全 可靠。 关键词 提升机 高压交流绕线 电机 转子 变频调速 中图分类号 T 2 .1 M9 15 文 献 标 识 码 B
() 1 高压交流绕 线 电机转子 变 频调 速控制 系统包 括有变 频器 , 流绕 线 电机 , 交 还设 置有 高压 开关 柜 , 变 压器 以及控制装 置 , 中, 其 高压开关柜 连接 变压器 的输 入端 , 变压器 的输 出端 连接变频器 的电源输 入端 , 变频 器 的输 出端连 接交 流绕 线 电机 , 于控 制 变频 器输 出 用 频率 的控制装 置与变频器相连 , 结构 简单 , 便于维修 。 () 2 变频 器与 交 流绕 线 电机 的转 子 相 连接 , 交流 绕线 电机 的定子被短 封 , 用于 旧系 统升级 改造 , 适 且系 统改造方便 , 接线简单 。 () 3 变压器的输 出电压 与变频 器 的输 出 电压 以及 交流绕线 电机 的转子 电压 相 匹配 , 实现 交流 电动 机 的 无级 变频调速 , 减少 了串电阻调速的 电能消耗 。
一
() 4 负力提升 工况 下交 流绕线 电机 的转 子输 出与 逆 变频器相连 接 , 流绕 线 电机 的转子输 出电压经 逆 交 变频器逆变后反馈 回电网 , 实现 了能源循环利用 。 12 系统构 成 . 提升机 电控 系 统 由 电源柜 、 变频 器 、 L P C控 制 台、 操作 控制台和各种传感器 组成。 () 1 电源柜。 电源柜主要通过 隔离 开关 向变频器 、 提升机供 电, 同时为 P C控制台 、 L 操作控 制台提工作电源 。 ()L 2 P C控制 台。 本提 升机 系统采 用 P C进行 控制 , L L P C监 视运行 状况 , 当系统 出现 故 障时 , 用故 障备 用信 号 , 在操 启 并 作 台的触 摸屏 上有 醒 目的故 障显示 , 提醒维 修人 员对 其进行维 护 ; 维护 中备用信号启 动 , 影响 系统 的正 常 不 提升 。
转速﹑电流双闭环直流调速系统

引言目前,转速﹑电流双闭环控制直流调速系统是性能很好﹑应用最广泛的直流调速系统。
我们知道采用转速负反馈和PI调节器的单闭环直流调速系统可以在保证系统稳定的前提下实现转速无静差。
但是,如果对系统的动态性能要求较高,例如:要求快速起制动,突加负载动态速降小等等,单闭环系统就难以满足需要。
故需要引入转速﹑电流双闭环控制直流调速系统,本文着重阐明其控制规律﹑性能特点和设计方法,是各种交﹑直流电力拖动自动控制系统的重要基础。
首先介绍转速﹑电流双闭环调速系统的组成及其静特性,接着说明该系统的动态数学模型,并从起动和抗扰两个方面分析其性能和转速与电流两个调节器的作用。
在实际应用中,电动机作为把电能转换为机械能的主要设备,一是要具有较高的机电能量转换效率;二是应能根据生产机械的工艺要求控制和调节电动机的旋转速度。
电动机的调速性能如何对提高产品质量、提高劳动生产率和节省电能有着直接的决定性影响。
因此,调速技术一直是研究的热点。
长期以来,直流电动机由于调速性能优越而掩盖了结构复杂等缺点广泛的应用于工程过程中。
直流电动机在额定转速以下运行时,保持励磁电流恒定,可用改变电枢电压的方法实现恒定转矩调速;在额定转速以上运行时,保持电枢电压恒定,可用改变励磁的方法实现恒功率调速。
采用转速、电流双闭环直流调速系统可获得优良的静、动态调速特性。
在现代化的工业生产中,几乎无处不使用电力拖动装置。
轧钢机、电铲、提升机、运输机等各类生产机械都要采用电动机来传动。
随着对生产工艺,产品质量的要求不断提高和产量的增长,越来越多的生产机械能实现自动调速。
从20世纪60年代以来,现代工业电力拖动系统达到了全新的发展阶段。
这种发展是以采用电力电子技术为基础的,在世界各国的工业部门中,直流电力拖动系统至今仍广泛的应用着。
直流拖动的突出优点在于:容易控制,能在很宽的范围内平滑而精确的调速,以及快速响应等。
在一定时期以内,直流拖动仍将具有强大的生命力。
第2章 直流电机的工作原理及拖动

直流发电机的工作原理
同直流电动机一样,直流发电机电枢线圈 中的感应电动势的方向也是交变的,而通 过换向器和电刷的整流作用,在电刷A、 B上输出的电动势是极性不变的直流电动 势。在电刷A、B之间接上负载,发电机 就能向负载供给直流电能。这就是直流发 电机的基本工作原理。
电机的可逆原理
一台直流电机原则上可以作为电动机运行,也 可以作为发电机运行,取决于外界输入能量的 不同条件。 将直流电流施加于电刷,输入电能,电机能将 电能转换为机械能,拖动生产机械旋转,成为 电动机运行;如用原动机拖动直流电机的电枢 旋转,输入机械能,电枢绕组便能切割磁场的 磁磁感应线产生感应电动势,电机能将机械能 转换为直流电能,从电刷端引出直流电动势, 作发电机运行。
2.1 直流电机的基本结构
直流电动机虽然比三相交流异步电动机结构复 杂,维修也不便,但由于它的调速性能较好和 起动转矩较大,因此,对调速要求较高的生产 机械或者需要较大起动转矩的生产机械往往采 用直流电动机驱动。 直流电动机的应用: (1)轧钢机、电气机车、中大型龙门刨床、矿 山竖井提升机以及起重设备等调速范围大的大 型设备。 (2)用蓄电池做电源的地方,如汽车、拖拉机 等。
2.6他励直流电动机的机械特性
所谓直流电动机的机械特性就是电机的转 速 n 随着负载转矩 T 的变化情况,研究电 机转速变化能够有助于更好地控制电机按 照生产工艺的要求拖动生产机械,高效率 、低损耗地运行。
2.6.1. 他励直流电动机机械特性方程
直流电动机的机械特性方程是由感应电动势方程、电磁 转矩方程和电压平衡方程推导出来的,即:
2.8.2 直流电动机的反接制动
对位能负载而言,反接制动有两种情况: 一是转速反向的反接制动,另一是电压反 接的反接制动。
提升机电控系统
提升机电控系统提升机电控系统分为以下几部分:电源柜、变频器、PLC控制台、操作控制台和各种传感器等几部分组成:1)电源柜电源柜主要通过隔离开关向变频器、提升机供电,同时为PLC控制台、操作控制台提工作电源。
2) PLC控制台本提升机系统采用PLC进行控制,PLC监视运行状况,当系统出现故障时,启用故障备用信号,并在操作台的触摸屏上有醒目的故障显示,提醒维修人员对其进行维护;维护中备用信号启动,不影响系统的正常提升。
3)变频器变频器采用ABB公司先进的变频器,它能达到控制交流电机完美的极限。
是第一代采用直接转矩控制技术(DTC)的交流变频器,作为提升专用变频器它还具有特殊提升机功能:特殊的应用程序,包括标准提升机系统的功能;转矩记忆,功率优化,限幅开关监控,机械制动器控制,转矩验证等。
4) 控制台控制台上设有自动、手动、检修转换开关,前方操作台上设有液晶触摸屏,左右侧操作台设有操作手柄、润滑、工作闸液压站电机的起停控制开关。
A、在控制台上的液晶触摸屏上采用翻页的方式做有几幅组态界面:监控主界面、闸控液压站界面、后备保护界面、故障查询界面、电源监控界面、变频器运行界面、提升信号状态。
B、每个界面上均有返回主界面的按钮,主界面上主要监视矸石车的实际运行位置、提升时每个时刻的速度、液压站的运行状况、较严重的故障报警。
主界面上还有相应的提升信号显示。
C、闸控液压站界面主要显示液压站的油压、油温、液位、液压站的电机工作状态、润滑油压力、松闸指示等。
D、后备保护界面主要显示:深度指示器监视、松绳保护、电机温度保护、减速器温度保护、减速点保护、减速点失效保护、上2m开关故障、下2m开关故障、上同步开关故障、下同步开关故障、上过卷、下过卷、上减速开关故障、下减速开关故障、错向保护、减速过速、等速过速、一级制动、二级制动、电流过载等E、故障查询界面主要用于对各种故障情况进行查询、追忆,便于对设备的维护和管理F、电源监控界面主要显示系统的电源原理图及主回路电流和电压。
提升机电气系统及其控制系统的改造

提升机电气系统及其控制系统的改造为了与实际工作面的生产能力及地面生产需求相匹配,一般情况下提升机处于运行的状态,其耗电量极高。
为了响应国家绿色生产的号召,电力生产也对相关设备的安全性和节能效果提出了更高的要求。
本文将对当前提升机电气控制系统的现状进行研究,并在此基础上对当前电气系统进行改造,而且达到煤矿提升机节能的效果。
标签:提升机电气自动化变频节能1 提升机电气自动化系统的改造1.1 变频调速原理分析目前,变频器在工业生产中的应用相对频繁且应用范围相对广泛,其主要功能是实现对交流异步电机的软启动、变频调速、过载保护、过流保护功能。
变频调速原理如式(1)所示:式中:n 为提升机电机的转速,f 为提升机电机的频率,s 为提升机电机的转差率,p 为提升机电机的极数。
由式(1)可知,通过调整电机的频率实现对电机转速的调节,进而实现对提升机转速的平滑调节。
1.2 变频器的选型实现对提升机的变频调速是矿井提升机电气控制系统的主要功能之一,而实现这一功能的核心元器件为变频器。
因此,矿井提升机电气控制系统的控制效果在一定程度上由变频器决定,即变频器在电气控制系统中的选型极为关键。
提升机电机的额定功率为110 kW,定子电流为236 A。
在查阅变频器选型手册和相关选型依据的基础上,最终方案中所选的变频器型号为ACS800-07-0550-7,并根据控制需求完成对变频器主线路的接线、PLC 控制信号与变频柜的连接以及变频器相关参数的设置。
1.3 控制策略的改进提升机变频调速实现的核心为PLC 控制器对提升机速度的变频调速,其控制系统的稳定性和可靠性尤其重要。
以往对提升机变频调速实现的算法为PID 控制。
为了对提升机速度的理想控制效果,将模糊控制理念应用于PID 控制器中,形成了模糊PID控制器。
模糊PID 控制的原理如图 1 所示。
图 1 中,模糊PID 控制器实现的关键在于对其中三个环节中的GkP、GkI 以及GkD 参数的确定。
矿井直流提升机调速系统设
矿井直流提升机调速系统设计目录1绪论 (1)2原理分析与模型建立 (1)2.1矿井提升机的工作原理 (1)2.2调速系统数学模型建立与仿真 (3)2.2.1调速系统数学模型建立 (3)2.2.2调速系统仿真 (6)3调速系统电路设计 (8)3.1控制方案对比 (8)3.2主电路结构设计分析 (8)3.2.1电路分析 (8)3.2.2参数设计 (9)3.3转速和电流检测 (13)3.3.1电流检测 (13)3.3.2转速检测 (14)4仿真与分析 (15)5存在的问题与展望 (16)6参考文献 (17)1绪论本文对矿井直流提升机调速系统进行了设计和分析。
首先,分析了矿井提升机的工作原理,建立了转速电流双闭环调速系统的数学模型,对各个环节的参数进行了设计,并对其性能进行了仿真分析。
接着,在调速系统电路设计中,第一部分对调速系统的不同控制方案进行了阐述;第二部分对桥式可逆PWM变换器-电动机系统主电路进行了分析,并对主电路器件参数和保护装置及其器件参数进行了计算和选择;第三部分对转速检测和电流检测的原理和电路进行了分析。
然后,将主电路在Matlab的Simulink环境下进行了搭建和仿真。
最后,分析了设计存在的问题并对调速方法进行了总结。
2原理分析与模型建立2.1矿井提升机的工作原理矿井提升机是指在采矿工程中,采矿工程中,联系井下与地面的主要运输设备。
矿井提升机是安装在地面,借助于钢丝绳带动提升容器沿井筒或斜坡道运行的提升机械。
它用于竖井和斜井提升煤炭、矿石、矸石以及升降人员、下放材料、工具和设备等。
根据工作原理的不同,矿井提升机可分为缠绕提升机和摩擦提升机,缠绕提升机可分为单绳缠绕和多绳缠绕,摩擦提升机可分为单绳摩擦和多绳摩擦。
我国常用的矿井提升机形式主要是单绳缠绕式和多绳摩擦式。
单绳缠绕式提升机的工作原理是:把钢丝绳的一端缠绕在提升机滚筒上,另一端绕过天轮悬挂提升容器,这样,利用滚筒转动方向的不同,矿山机械设备将钢丝绳缠紧或放松,就可以完成提升或下放提升容器的任务。
直流提升机电控系统主控台电气工作原理

直流提升机电控系统主控台电气工作原理(西门子PLC)一、总电源开关(1ZK)、制动泵转换开关K1及接触器(JC1)控制:1、1ZK为主控台电源总开关,该开关起过载、过流作用。
2、JC1用于控制制动泵的闭合与分断,K1为两台制动泵电机的切换开关,D1为制动泵1,D2为制动泵2,其中一台使用,另外一台为备用;按面板上的制动泵启动按钮1QA,此时JC1得电,制动泵启动,制动泵开指示灯亮,当制动油过压后,由外部传感器送来的信号经PLC处理后,串接在控制回路的J2接点断开,制动泵停止。
二、润滑泵控制:转换开关(2HK)为两台润滑泵的控制开关,接触器JC2、JC3分别控制两台润滑泵的闭合与分断,启动任何1台润滑泵,面板上的工作润滑泵开指示灯亮,为实现其中任何一台润滑泵电机自动启停,其控制回路串入RHBK(PLC输出控制)接点,另外JC2、JC3上各增加一个常开接点,返回到主PLC的输入端,用于系统控制。
三、电源指示、调零控制(1HK)、安全阀(3HK)开关:1、面板上有指针表指示AC220V电源,并在表头上增加了电源检测模块,将有无电压信号送到主机的SM321上201线号,进行外部电源掉电检测及保护。
2、调零控制:对多绳磨擦轮式提升机,其钢丝绳容易产生滑动、蠕动和自然伸长现象,会使绞车到位时,牌坊式深度指示器停车产生误差,这样就需要开动调零电机,使调零电机带动深度指示器机械传动部件,使其正转或反转消除上述产生的误差,在PLC控制的调零条件(TLTJ)满足后,其中1HK4-4为正转开关,1HK2-2为反转开关。
3、其中G3、G4阀为安全阀,当3HK右旋(箭头向左)时,G3、G4阀均得电,当3HK左旋时,G3阀得电,G4阀不得电,中间位置都不得电。
四、控制变压器、辅助电源板、显示屏、语言板⑴控制变压器(FZB)控制变压器由UPS 电源供电,AC220V电压经变压器处理后,输出不同等级电压:110V/0.6A 电源为备用;28V/和18V电压等级提供给辅助电源板使用。
ASCS直流提升机电控系统组成

φ
N2
i2
A
电流互感器原理图
调节系统硬件简介
●
电流互感器在本系统中的应用 在本系统中,电流检测原理如下图所示: 在本系统中,电流检测原理如下图所示:
H1
H2
H3 D1 D3 D5 C1 R1 C2 D2 PE D4 D6 C3
调节系统硬件简介
因为本设计需要检测三相交流电的电流, 因为本设计需要检测三相交流电的电流,因此需要三 个电流传感器。 个电流传感器。将三个电流互感器二次侧的同名端相连并 接地,则另外一端则分别代表A 三相电流的感应电流。 接地,则另外一端则分别代表A、B、C三相电流的感应电流。 将它们经过三相整流,便得到直流电流, 将它们经过三相整流,便得到直流电流,再选配合适的电 阻串入到整流桥的直流侧, 阻串入到整流桥的直流侧,就能得到与电流成比例的直流 电压,经过滤波,直接引到系统的A/D口进行模/数转换。 A/D口进行模 电压,经过滤波,直接引到系统的A/D口进行模/数转换。 (2)电流LEM传感器 电流LEM传感器 LEM 此传感器利用霍尔原理,来检测电流大小, 此传感器利用霍尔原理,来检测电流大小,一般输 出0-5V,需要供电,安装套在电缆上 ,不需要串在回路里, 5V,需要供电, 不需要串在回路里, 在本系统中的作用主要是采集电流进行保护, 在本系统中的作用主要是采集电流进行保护,没有参与控 制。
调节系统硬件简介
Ⅶ、零电流检测部分
● 采样电阻
装在整流柜或磁场柜里,检测晶闸管两端电压, 装在整流柜或磁场柜里,检测晶闸管两端电压,经过 检测板来判断回路是否有电流。 检测板来判断回路是否有电流。
● 检测板
采用通过检测晶闸管两端电压的有无来确定电流是否过 零的原理电路如下图所示。图中给出了U 零的原理电路如下图所示。图中给出了U相的电流过零检测 电路, 电路,
龙湖煤矿提升机全数字直流调速系统
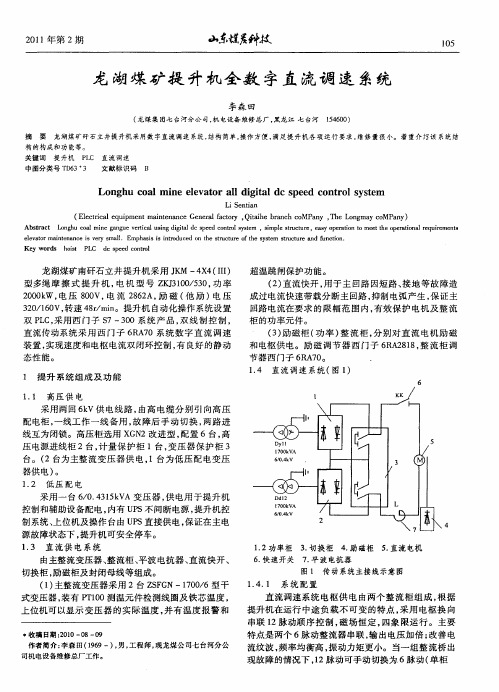
源故障状态下 , 提升机 可安全停车。 1 3 直流供 电系统 . 由主整流变压器 、 整流柜 、 平波电抗器 、 流快开、 直 切换柜 , 励磁柜及封 闭母 线等组成。 () 1 主整流变压器采 用 2台 Z F N一10 / SG 70 6型 干 式变压器 , 装有 P I0测温元 件检测线圈及铁芯温度 , TO 上位机 可以显示 变压 器 的实际温 度 , 并有 温度报 警和
“ S n in et a
( lc i l q im n Mne ̄c eea f tr , iiebac o P n ,h og a o ay Eetc up e t ra e m t n eG nr co Qt h rnhc M ay T eLn m ycMP n ) la y a
Ab t a t L n h o lmi e g n ue v r c lu i g d gtld p e o t ls s e ,smp e sr c u e,e s p r t n t e h p r t n lr q i me t s r c o g u c a n a g e t a sn ii e s e d c n r y t m i a o i l t t r u a y o e a i o me t e o e i a e u r o t a o e ns
+ 稿 日期 :0 0—0 收 21 8—0 9
12功率柜 3 切换柜 4 励磁柜 5 直流 电机 . . . .
6 快速开关 . 7 平 波 电抗 器 .
图 1 传动系统主接线示意 图
14 1 系 统 配 置 . .
直流调速系统 电枢 供 电由两个 整流 柜组成 , 根据 提升机在运行 中途负 载不 可变 的特点 , 用 电枢 换 向 采 串联 l 2脉动顺序 控制 , 场恒定 , 磁 四象 限运行 。主要 特点是两个 6脉动整流器 串联 , 出电压 加倍 ; 输 改善 电
矿井提升机直流调速电控原理

矿井提升机直流调速电控设备工作原理:全数字调速系统主要由全数字调速装置和晶闸管变流器组成。
通常有两种配置方式,一种是调速装置和晶闸管全部采用进口件;另一种是采用进口的小型全数字调速装置,配置国产的晶闸管功率单元随着国产可控硅质量提高,这种配置比较常用。
特别对于较大容量的提升机性能价格性能价格比较优良,使用效果也不错。
根据用户实际需要,晶闸管装置可以配置成6脉动、串联12脉动或并联12脉动。
对于串联12脉动,当一组晶闸管装置发生故障情况下,可以切换为6脉动全载半速运行。
矿井提升机的工艺要求提升电动机必须能正反转。
因此,全数字直流电控可以设计成磁场反向,也可以设计成电枢反向;随着晶闸管器件的普及,价格不断下降,加上电枢反向比磁场反向在快速性,对电动机的影响,复杂性占有优势,因此,矿井提升机直流传动有都将主回路设计成电枢可逆的趋势。
技术性能:1、直流传动属无级调速,全数字调速精度高,一般<1%。
2、具有多种故障自检保护功能,运行安全可靠。
3、加、减速段是具有防冲击的S化给定曲线控制。
4、参数的设备可通过菜单来设定。
5、全数字直流调节系统电流环,速度环的参当选可通过系统的自优化完成。
6、对主回路串、并联12肪动可减少高次谐波和无功冲击。
7、控制系统采用PLC控制并与全数字直流调速系统、上位机等训件组成网络,使各部分的信号传递更方便、准确。
8、完善的提升系统的后备保护,使提升机运行更加安全可靠。
9、先进的数字深度指示功能,带有精、精针显示,精度达±1cm。
10、上位机的应用使PLC软件的编制,修改更加方便;画面的应用,使管理人员对系统运行状况一目了然。
11、远程专家服务系统的应用可使用户解决后顾之忧。
适用范围单组6脉动直流调速电控设备,使用于电动机≤ 800kW以下的的矿井提升机。
并联12脉动直流调速电控设备,使用于500kW ≤电动机≤2500kW 的矿井提升机。
串联12脉动直流调速电控设备,使用于500kW ≤电动机≤2500kW 的矿井提升机。
直流提升机电控系统使用说明书
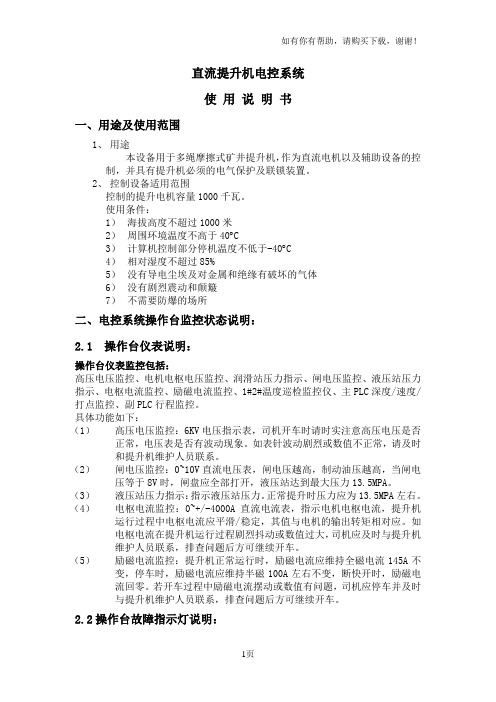
直流提升机电控系统使用说明书一、用途及使用范围1、用途本设备用于多绳摩擦式矿井提升机,作为直流电机以及辅助设备的控制,并具有提升机必须的电气保护及联锁装置。
2、控制设备适用范围控制的提升电机容量1000千瓦。
使用条件:1)海拔高度不超过1000米2)周围环境温度不高于40︒C3)计算机控制部分停机温度不低于-40︒C4)相对湿度不超过85%5)没有导电尘埃及对金属和绝缘有破坏的气体6)没有剧烈震动和颠簸7)不需要防爆的场所二、电控系统操作台监控状态说明:2.1 操作台仪表说明:操作台仪表监控包括:高压电压监控、电机电枢电压监控、润滑站压力指示、闸电压监控、液压站压力指示、电枢电流监控、励磁电流监控、1#2#温度巡检监控仪、主PLC深度/速度/打点监控、副PLC行程监控。
具体功能如下:(1)高压电压监控:6KV电压指示表,司机开车时请时实注意高压电压是否正常,电压表是否有波动现象。
如表针波动剧烈或数值不正常,请及时和提升机维护人员联系。
(2)闸电压监控:0~10V直流电压表,闸电压越高,制动油压越高,当闸电压等于8V时,闸盘应全部打开,液压站达到最大压力13.5MPA。
(3)液压站压力指示:指示液压站压力。
正常提升时压力应为13.5MPA左右。
(4)电枢电流监控:0~+/-4000A直流电流表,指示电机电枢电流,提升机运行过程中电枢电流应平滑/稳定,其值与电机的输出转矩相对应。
如电枢电流在提升机运行过程剧烈抖动或数值过大,司机应及时与提升机维护人员联系,排查问题后方可继续开车。
(5)励磁电流监控:提升机正常运行时,励磁电流应维持全磁电流145A不变,停车时,励磁电流应维持半磁100A左右不变,断快开时,励磁电流回零。
若开车过程中励磁电流摆动或数值有问题,司机应停车并及时与提升机维护人员联系,排查问题后方可继续开车。
2.2操作台故障指示灯说明:安全回路:正常时亮,有故障时灭。
正常时允许开车,故障时禁止开车。
提升机的节能变频调速控制技术

提升机的节能变频调速控制技术【摘要】提升机在工业生产中扮演着重要角色,其能耗问题一直备受关注。
为了提高提升机的节能效果,节能变频调速技术被引入。
节能变频控制器的作用是通过调整电机转速,实现能耗的优化,进而提升机节能效果显著。
本文分析了节能变频调速技术在提升机中的应用,并总结了其优势和节能改造方案。
通过提升机的节能改造,不仅可以降低能耗,还能提高生产效率。
未来,节能变频技术在提升机领域的发展前景广阔,将进一步推动提升机的节能化进程。
提升机节能变频调速控制技术的重要性不可忽视,对于企业节能降耗、环保减排具有积极的作用。
【关键词】提升机、节能、变频调速控制技术、节能意义、节能效果、节能变频控制器、应用、优势、改造方案、重要性、发展前景1. 引言1.1 提升机的节能意义提升机作为工业生产中常用的设备,旨在方便物料的上下运输,提高生产效率。
传统提升机在使用过程中存在能源消耗大、运行效率低等问题,给企业的生产成本和能源消耗带来了较大压力。
提升机的节能问题逐渐成为行业关注的焦点。
提升机的节能可以降低企业的生产成本。
传统提升机采用常速运行,电机启停频繁,能耗较高。
而使用节能变频调速技术可以根据实际需要调整提升机的运行速度,减少空载运行,降低能源消耗,从而节约电力费用。
提升机的节能可以降低环境污染。
传统提升机在运行过程中产生的噪音和废气会对周围环境和员工的健康造成影响。
而节能变频调速技术不仅可以降低提升机的运行噪音,减少环境污染,还可以提升生产场地的整体环境质量。
提升机的节能意义不仅在于降低生产成本、减少能源消耗,还在于提升企业形象,减少环境污染,实现可持续发展。
引入节能变频调速技术对于提升机的节能改造具有重要意义。
1.2 节能变频调速技术介绍节能变频调速技术是一种在提升机领域应用广泛的技术,其通过控制提升机电机的转速,实现对提升机运行速度的调节,从而达到节能的目的。
在传统的提升机中,由于电机只有两种运行状态,即全速和停止,致使提升机在运行过程中频繁启动和停止,能耗较高,效率较低。
第二章下直流提升机调速系统控制

2.3 直流提升机调速系统计算机控制算法对于一个具体的直流提升机系统来说,通常总存在着一些不可变部分,例如直流电动机、晶闸管供电电路、机械传动等,都是事先已确定了的,不可能随意改变。
要实现直流提升机调速系统的计算机控制,首先遇到的就是设计问题。
计算机控制系统的设计包括两个任务:其一是设计系统的硬件,其二是设计控制算法,即软件设计。
前者是指选择系统各环节的电路和参数值,选择输入量的检测装置以及控制计算机的机种和接口等,使其与不可变部分(或称固有部分),组成一个完整的控制系统。
后者则主要指确定采用的控制规律,选择各控制参数,并以程序的形式输入计算机。
有关硬件设计内容在2.2小节中已经作了详细讨论,本节将以电枢电流单向、励磁电流换向的直流提升机调速系统为例(如图2-3-1所示),讨论如何用计算机程序来实现直流提升机调速系统中电枢电流、转速、励磁电流的控制、可逆系统无环流控制以及触发脉冲的产生(即图2-3-1虚框里的功能)。
速转零电号脉冲放大12磁场脉冲放大场脉冲放大同步信号同步信号号脉冲放大图2-3-1电枢电流单向、励磁电流换向的直流提升机调速系统原理结构2.3.1直流提升机控制软件设计概述关于软件设计,即选择控制规律和控制参数,与模拟连续系统综合校正方法的步骤基本相似。
在对连续系统进行综合时,设计者根据对控制系统稳态和动态性能提出的要求,在时域中即是对动态误差(或误差系数)、阶约响应的调节时间、超调量和振荡次数等的要求,在已知不可变部分的情况下,设计出系统的校正,使系统的实际性能指标达到预期的要求。
对于计算机控制系统,模拟校正装置由数字计算机代替,模拟校正装置担负的计算和控制任务将由计算机来完成。
因此,选择校正装置的结构和参数的工作就转变为设计由计算机实现的控制算法和控制程序。
在用模拟调节器对直流提升机进行控制时,各项控制是同时进行的。
在用数字计算机实现上述控制时,由于计算机在任一时刻只能做一项工作,所以各项控制是分时进行的。
直流电机调速控制
E为电枢电动势
R为电枢回路的总电阻
n为电机的转速
Φ为励磁磁通
CE为由电机构造决定的电动势系数
n E UIR CE CE
他励直流电动机的调速方式有三种: 1、电枢回路串电阻的变电阻调速, 2、改变电枢电压的变电压调速 3、减小气隙磁通量的弱磁调速。
由于串电阻调速和弱磁调速都会 使直流他励电机的机械特性变软,所 以在实际应用中我们通常采用的是变 电压调速。
改变磁通 。
采用减少励磁电流(减弱磁通)的方法调速, 即
Rf If n 改变时的机械特性如图。
改变磁通调速的方法:
n0'' n n0' n0
减小磁通,n只能上调。 O
(
Rf
增减 加小
) TL T
二、直流调速控制线路原理简介
什么是调速
将调节电动机转速,以适应生产要 求的过程就称之为调速;而用于完成 这一功能的自动控制系统就被称为自 动调速系统。
数。 5、整修工艺。 6、写设备使用说明书。
巡回检查
巡回指导 1、对学生解决问题的方案进展检查。 2、对学生提出的方案进展论证可行性。 3、对学生提出的电路改进方案的解决步骤、解决 要
点进展说明。 4、对学生改造完成后的调速设备进展测量和试运
行。 5、强调平安性的维修和设备改造。
检查: 学生按所提的解决方案进展实际操作,教师巡回检查, 及时发现问题及时解决,尤其是对与有平安隐患的操作 维修要特别的重视。
参考教材 电子技术根底 维修电工〔技师 高级技师〕 数电模电相关书籍 电源 技术等
③用光电耦合器代替脉冲变压器
1、设计电原理图、分析工作原理,确保电路的可行性。 2、先查找相关元器件的技术参数,后确定改造用元器件参数。 3、对改进后电路进展实际安装、调试和试运行,实际测量数据、波形 并记录。 4、试运行成功后再对系统电路进展改造。
第二章上直流提升机调速系统控制

第2章 直流提升机调速系统计算机控制直流提升机调速系统是对提升机实施电力拖动控制的具体执行系统,它接收来自PLC 控制系统的操作指令和速度参考信号,并根据系统设定的各种运行指标,通过速度和电流双闭环PI 调节控制,最后产生整流器中可控硅的触发信号,使整流器输出直流电压,从而达到控制提升机拖动电机运转的目的。
2.1直流提升机转速、电流双闭环调速系统2.1.1直流提升机常用的晶闸管整流装置及谐波问题 1、三相全控桥三相全控桥是提升机晶闸管电力拖动系统中最基本的组成部分,其电路如图2-1所示。
d~图2-1 三相全控桥供电的直流调速系统(1)主电路三相全控桥主电路由六个晶闸管V 1~V 6组成。
通过每一个器件的电流波形是宽度为1200的方波,如图2-2a 所示。
通过每个器件的电流有效值为d I Iv 577.0= (2-1) 式中 I d — 直流负载电流(A )。
通过交流侧相电流波形如图2-2b 所示。
交流电流有效值I 2 d I I 816.02= (2-2) 每个晶闸管承受的最大正反向电压为22632U U U km =∙= (2-3) 式中 U 2—交流侧相电压有效值(V )。
i Vi 2b )图2-2 三相桥桥臂电流i V 和交流侧电流i 2波形(2)保护电路晶闸管的缺点是过载能力很差,瞬时过电压和瞬时过电流都可能使它损坏,所以要设置过电压保护和过电流保护电路。
在图-1中,R b1~R b6,C 1~C 6为器件侧的阻容吸收电路,作用是以致换相过电压。
压敏电阻RV 1~RV 3是用来抑制三相桥交流侧产生的操作过电压。
快熔FU 1~FU 6是对晶闸管起高倍数过载或短路保护作用。
(3)三相整流桥输出电压在负载电流连续时,三相桥的输出电压(空载电压)平均值U d 为 αc o s 34.22U U d = (2-4) 式中, α —触发延迟角( 0)。
(4)晶闸管—电动机机械特性如图2-3所示。
当电流I d 连续时,n=f (I d )特性是一条随I d 增大而下垂的直线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.3 直流提升机调速系统计算机控制算法对于一个具体的直流提升机系统来说,通常总存在着一些不可变部分,例如直流电动机、晶闸管供电电路、机械传动等,都是事先已确定了的,不可能随意改变。
要实现直流提升机调速系统的计算机控制,首先遇到的就是设计问题。
计算机控制系统的设计包括两个任务:其一是设计系统的硬件,其二是设计控制算法,即软件设计。
前者是指选择系统各环节的电路和参数值,选择输入量的检测装置以及控制计算机的机种和接口等,使其与不可变部分(或称固有部分),组成一个完整的控制系统。
后者则主要指确定采用的控制规律,选择各控制参数,并以程序的形式输入计算机。
有关硬件设计内容在2.2小节中已经作了详细讨论,本节将以电枢电流单向、励磁电流换向的直流提升机调速系统为例(如图2-3-1所示),讨论如何用计算机程序来实现直流提升机调速系统中电枢电流、转速、励磁电流的控制、可逆系统无环流控制以及触发脉冲的产生(即图2-3-1虚框里的功能)。
速转零电号脉冲放大12磁场脉冲放大场脉冲放大同步信号同步信号号脉冲放大图2-3-1电枢电流单向、励磁电流换向的直流提升机调速系统原理结构2.3.1直流提升机控制软件设计概述关于软件设计,即选择控制规律和控制参数,与模拟连续系统综合校正方法的步骤基本相似。
在对连续系统进行综合时,设计者根据对控制系统稳态和动态性能提出的要求,在时域中即是对动态误差(或误差系数)、阶约响应的调节时间、超调量和振荡次数等的要求,在已知不可变部分的情况下,设计出系统的校正,使系统的实际性能指标达到预期的要求。
对于计算机控制系统,模拟校正装置由数字计算机代替,模拟校正装置担负的计算和控制任务将由计算机来完成。
因此,选择校正装置的结构和参数的工作就转变为设计由计算机实现的控制算法和控制程序。
在用模拟调节器对直流提升机进行控制时,各项控制是同时进行的。
在用数字计算机实现上述控制时,由于计算机在任一时刻只能做一项工作,所以各项控制是分时进行的。
计算机控制系统在实际上是一个混合系统,既可以在一定的条件下近似的看成一个模拟系统,用模拟系统的分析方法进行分析和综合,再将设计结果离散化,转变为数字计算机的控制算法。
也可以把系统经过适当的变换,变为纯粹的离散系统,用Z变换等工具进行分析和综合,直接设计出控制算法。
下面简要叙述一下两种方法的基本设计思想。
1、“模拟系统”设计法当采样频率足够高时,采样系统中物理量的变化特性接近于连续变化的模拟量,就可以忽略采样开关和保持器,把实际的采样系统看成是一个连续系统。
这时就可以直接引用模拟系统的设计方法在S 域中设计校正装置,在利用S 域到Z 域离散化方法求得校正装置的离散传递函数D(Z).采用“模拟系统”设计方法的根据是shannon 采样定理:当采样频率大于或等于原信号中所含最高频率的二倍时,才能够通过理想的滤波器把原信号无畸变地恢复系统的特性。
在实际的控制系统中,考虑到其他因素的影响,通常把采样频率选为原信号中最高频率的4-10倍,否则很难得到理想效果。
用“模拟系统”设计方法求出校正装置以后还必须进行离散化处理,求得离散算式,由计算机实现控制运算。
通常有下列几中离散化处理方法:(1)由传递函数D(S)求出对应的输出量和输入量的微分方程式,再用差分方程式代替微分方程,即可求得输出的离散化算式。
例如已知SS E S U S D τ1)()()(== 其对应的微分方程为)()(t e t u =τ用[U(n)-U(n -1)]/T 代替u(t ),并设u (0)=0,则有)1()0()1(E U U T τ+=)]2()1()2()1()2(E E E U U T T +=+=ττ∑==+++=ni TTi E n E E E n U 1)()(...)2()1([)(ττ(2)部分分式法。
若D(S)可以写成部分分式的形式,即∑=+=ni S p A s D ii 1)( 则可根据拉氏变换与Z 变换的关系查表求得D (z),即∑=--=ni Z e A Z D piT i 1)(式中T 是采样周期。
由D(Z)即可求得离散算式。
例如已知a S S a S S aS E S U S D ++-===11)()()()( 则 ze z e z eeZ D aT aT aT aTZ Z Z Z 211)1(1)1(1)(-------++----=-= 故得)1()1()2()1()1()(--+---+=---n E n U n U n U eeeaTaTaT(3)零极点匹配法时间域的采样操作,其效应是直接将S域函数的极点根据公式eaTZ -=映射到Z 域。
通常D(S)_的极点个数多于零点个数,我们可以把D(S )看成除有m 个有限零点外,还具有n-m个无限零点,无限零点映射到Z平面时就位于Z=-1处。
D(S)总可以通过因式分解成下面的形式,即∏+∏+∏+=++==][]2212122)()()[()(d C i s C i s b a j s S D i gi r j j K根据上式将D (S)的零极点映射到Z 平面,其转换关系是:)()(e a Tj a Z s j --−→−+或)1(1e Z T a j ---);cos 2()(22e e z b a T T j j a TZ b a j s j j --+-−→−±+或)cos21(221z e b ezT j T a T a jj ----+-在Z =-1处加上足够的零点,使零极点数相等。
2、“离散系统”设计法“连续系统”设计法把实际的离散控制系统视为连续控制系统,其实际性能指标与理论值必然存在差异,所以这种设计方法是一种近似的设计方法。
而“离散系统”设计法,即直接在离散域中进行设计,避免了上述的近似性,从而也不再存在采样频率对设计结果的影响。
有三种离散域的分析方法可以用来对系统进行综合:(1)根轨迹法。
即在Z 平面内配置适当的零极点位置,使系统的性能指标达到预期的要求,从而求得D(S).(2)频率法。
把综合或校正问题由S 平面转换到W 平面,由伯德图求得D (S). (3)解析法。
用解析法对离散系统进行设计是50年代发展起来的一种设计方法,它的基本出发点是将期望的闭环系统的行为预先出来,再通过解析运算求出控制器的传递函数。
2.3.2电枢电流控制算法在图2-3-1所示的电枢电流单向、励磁电流换向的直流提升机调速系统中,电流给定通常是转速调节器的输出,电流反馈信号经A/D 转换获得。
电流调节器根据给定与反馈信号的差值对晶闸管的控制角进行控制,从而实现对电枢电流的控制。
用来实现电流控制的算法很多,下面介绍常用的PI 调节算法。
PI 调节器的传递函数:SSS S E S S W KK K Upp pkτττ+=+==)1()()()(其中U k及E 分别代表调节器的输出和输入,故)()()()()()(S E SS E S S E S W S KK U pp K τ+==输出的原函数则是ﻫ离散化后第n 拍的输出⎰+=d KK U tpp K t e t e t )()()(τ∑=+=ni ppKi e Tn e n K K U1)()()(τ令τTK K pI=,其中T是采样周期。
代入上式可得ﻫ ∑-=++=11)()()(n i I I pi e n e n e K K K(2-3-4)当调节器参数K p 和τ以及采样周期已知后,就可以根据每一拍的电流给定与电流反馈之差e(n),由上式计算这一拍的输出U K (n).式(2-3-4)称为PI调节器的位置式算式,另外还有一种增量式算式。
由式(2-3-4)可得n-1拍的输出是∑-=+-=-11)()1()1(n i I pKi e n e n K KU将上式代入式(2-3-4)可得)1()()()1()(--++-=n e n e n n K K K U U p I p K K 令 )1()1()1(---=-n e n n W K U p K ,K=K p +KI 便可得到增量式算法的算式)()1()(n Ke n W n UK+-=(2-3-5)式中,W(n-1)是上一拍计算出的一个中间变量,从而Ke(n )则是本拍的计算值。
例如,已知Kp =1,秒01.0=τ,T=0.002秒,2.0/*==τT KK pI根据式(2-3-4)可得位置式算法为∑∑-+=++=-=)1(2.0)(2.1)(2.0)(2.0)()(11n n e i e n e n e n n i KU根据式(2-3-5)可得增量式算法的算式为)(2.1)1()1()(n e n e n n U UK K+---=(1)PI 调节运算的实现∑=+=ni I p K i e n e n K K U 1)()()(图2-3-2是利用单片机按式(2-3-4)进行位置式P I调节运算的程序流程图。
其中U g i是电流给定量,Ufi 是电流反馈量,U K 代表调节器的输出,P 代表的比例部分,∑代表U K的积分部分,F0H和00H分别代表上限幅值和下限幅值,分别对应于晶闸管控制角a的最大值和最小值。
(2)采样周期选择选择采样周期的依据是Shan non 采样定理。
对于一个闭环系统来说,它能够响应的输入信号中的最高频率就是它的闭环截止频率。
设系统的闭环截止角频率为ωc ,按照Shannon 采样定理采样周期T 应该是T≤0.5/ωc(秒) (2-3-6)其中ωc 的单位是周/秒。
电流环通常校正成二阶系统,由参考文献[8] 可知二阶系统的闭环截止角频率等于)12()244(224--+-=ζζζωωnc其中 n ω=ioT K ∑ n ω 称为无阻尼自然振荡角频率,K0是系统的开环放大数,T ∑i 是电流环的小时间常数之和,ζ是阻尼系数。
如果令ζ=0.707,即校正成最佳二阶系统,则有 iO T K ∑=21 ii n c T T ∑∑===22212ωω 代入式(2-3-6)则可求得采样周期为 2i T T ∑≤(秒)例如,已知电流环小时间常数之和为T∑i=3.7毫秒,则3109.220037.0-⨯=≤T (秒)图2-3-2 位置式PI调节运算的程序流程图(3)调节器参数选择1)PI调节器参数对控制性能的影响①比例控制Kp对系统性能的影响对动态特性的影响:比例控制Kp加大,使系统的动作灵敏、速度加快;Kp偏大时,震荡次数加多,调节时间加长;当K p太大时,系统会趋于不稳定。
若Kp 太小,又会使系统的动作缓慢。
对稳态特性的影响:加大比例控制K p。
在系统稳定的情况下,可以减少稳态误差,提高控制精度,但加大Kp 只减少误差,却不能完全消除稳态误差。
② 积分控制Ki 对控制性能的影响对动态特性的影响:积分控制Ki 通常使系统的稳定性下降,Ki 太小,系统将不稳定;Ki 偏小,系统震荡次数较多;Ki 太大,对系统性能的影响减少。