基于单片机的智能救援机器人小车设计
基于单片机的智能灭火小车设计与实现论文
摘要:该设计应用AT89C51,可以与数码显示管、电路等相结合的元件作为小车的控制核心,可以与数码显示管、电路等相结合。
基于单片机设计,AT89C51作为报警装置的控制器,可以充分运用AT89C51的数据处理和实时控制功能,让小车处于最好的状态。
当电机信号产生驱动灭火小车行进时,根据寻迹模块的红外对管能否寻到黑线产生的高低电平信号再传送到单片机,单片机根据程序设计要求做出相应的判断送给电机驱动模块.让小车在黑线上实现运行及转向的功能。
通过超声波传感器接受到障碍物信号,实现超声波避障功能。
通过红外传感感知温度,实现小车的灭火功能。
关键词:单片机路况检测报警超声波灭火Speech Control Robot based on STM32Abstract:This design USES AT89C51 as the control core of the car, and digital display tube, circuit, etc. Based on MCU design, AT89C51 as the controller of the alarm device, can fully AT89C51 data processing and real-time control functions. Keep the car in top condition. When the motor signal is generated to drive the fire fighting cart, the high-low level signal generated by the black line can be detected by the infrared pair tube of the tracing module and then transmitted to the MCU, which makes the corresponding judgment according to the program design requirements and sends it to the motor drive module to realize the function of running and turning on the black line. Ultrasonic obstacle avoidance function is realized by receiving the obstacle signal through ultrasonic sensor. The fire extinguishing function of the car is realized by sensing the temperature with the infrared sensor.Key words:Single chip microcomputer tracking alarm ultrasonic目录前言 (2)1 方案设计 (4)1.1 方案论证 (4)1.1.1 控制器的选择与论证 (4)1.1.2 电机驱动芯片的选择与论证 (4)1.1.3 显示器件的选择与论证 (5)1.1.4 路况检测模块 (5)2 系统硬件电路与实现 (5)2.1 红外遥控及解码模块 (5)2.2 红外遥控模块及解码模块 (6)2.2.1 二进制信号的调制 (6)2.2.2 二进制信号的解调 (7)2.2.3 二进制信号的解码 (7)2.3 单片机红外硬件电路的实现 (8)2.4 电机驱动智能灭火模块 (8)2.5 路况检测模块 (11)2.6 智能防撞报警模块 (12)3 系统软件设计及实现 (14)3.1 红外整体程序 (14)3.2 红外遥控的解码和实现 (15)3.3 电机驱动灭火 (16)3.4 小车防撞报警 (17)4 系统调试 (18)4.1 遥控发送接收调试 (19)4.2 灭火驱动调试 (20)5 总结 (22)前言在现代社会,单片机技术发展迅速,机械电子技术逐步融合,自动控制技术在工业中的地位已经变得非常重要。
基于MSP430的小车式灭火机器人设计

摘
要: 本 设 计 是 以 MS P 4 3 0 F 1 4 9单 片 机 为 核 心 的小 车 式 灭 火 报 警 机 器 人 , 通 过 红 外 火 焰 传 感 器 的数 字 输 出进 行 火 源 寻 找 ,
并 根 据 采 集 到 的信 号 对 行 进 方 向进 行 调整 , 同时 利 用 红 外 对 管 实 现 机 器 人 避 障 。 机 器 人 行 进 过 程 中 能 够 依 据 火 焰 传 感 器 的
a c c o r d i n g t o t h e c o l l e c t e d s i g n a l , a n d a v o i d o b s t a c l e s wi t h i n f r a r e d c o u n t e r t u b e a t t h e s a me t i me .Th e r o b o t c a n e s t i ma t e t h e d i s t a n c e b e t we e n t h e r o b o t a n d t h e f i r e a c c o r d i n g t O t h e a n a l o g o u t pu t o f t h e i n f r a r e d f l a me s e n s o r , a n d d e t e c t a mb i e n t
Ab s t r a c t :The d e s i g n i s b a s e d o n t h e M SP4 3 0 F1 4 9 s i n g l e c h i p mi c r o c o mp u t e r wh i c h i s t h e c o r e o f t h e c a r - t y p e f i r e f i g h t —
基于单片机的智能小车的设计

基于单片机的智能小车的设计摘要:本文基于单片机的智能小车的设计,旨在介绍如何利用单片机构建一台可以具备自主移动、避障、计算机视觉等功能的智能小车。
设计方案中,我们使用了Arduino单片机、红外避障传感器、超声波测距模块、直流电机等部件。
通过编写C程序,实现了小车的自主移动、避障、根据环境反应等功能。
设计方案中的Arduino单片机具有高度的集成度、易于学习和操作等优点,为初学者提供了一个不错的学习平台。
关键词:单片机、智能小车、避障传感器、计算机视觉引言:智能小车是一种能够自主移动、避障、计算机视觉等功能的机器人。
具有良好的控制和感知能力,可以广泛应用于工业自动化、机器人研究、教育等领域。
本文基于单片机的智能小车的设计,将介绍如何构建一台具有自主移动、避障、计算机视觉等功能的智能小车。
设计方案:本文采用的单片机是Arduino单片机,它具有高度的集成度、易于学习和操作等优点。
通过编写C程序,实现小车的自主移动、避障、计算机视觉等功能。
下面我们将详细介绍设计方案中所用到的部件。
1、红外避障传感器红外避障传感器是一种检测环境障碍物的传感器。
它通过发射红外线和接收红外线来探测周围的障碍物,进而实现小车的避障功能。
在本设计方案中,我们采用了4个红外避障传感器,分别装在小车前、后、左、右四个方向。
2、超声波测距模块超声波测距模块是一种测量距离的传感器。
它通过发射超声波并接收反射回来的波来测量与障碍物的距离。
在本设计方案中,我们使用超声波测距模块来帮助小车判断前方障碍物的距离。
3、直流电机直流电机是小车的驱动部分。
通过控制电机的正反转来实现小车的前进、后退和转向。
在本设计方案中,我们采用了两个直流电机来驱动小车。
编程实现:在编程的实现过程中,我们利用C语言编写了控制程序。
程序中通过Arduino单片机读取四个红外避障传感器、超声波测距模块的数据,并根据这些数据实时调整小车的运动状态。
下面是程序的主要流程:1、启动程序,初始化各个部件2、获取红外避障传感器的数据3、将传感器数据转换成小车需要控制的运动方向4、判断前方是否有障碍物5、根据判断结果调整小车运动方向6、重复执行2-5步,实现小车的自主移动和避障功能。
基于单片机的智能小车设计
基于单片机的智能小车设计基于单片机的智能小车设计一、引言本文档旨在介绍一个基于单片机的智能小车设计。
智能小车是一种能够自主感知环境、做出决策并执行动作的。
本设计将通过单片机控制小车的移动与感知功能,使其能够自主避障、跟随线路、遥控操作等。
二、需求分析2.1 功能需求●小车应能够通过避障传感器、红外线传感器等感知器件检测周围环境,自主避开障碍物。
●小车应能够根据预设的线路进行自主导航,并能跟随或保持在线路上运行。
●小车应支持遥控操作,用户可以通过遥控器控制小车的运动。
●小车应能够通过摄像头等视觉传感器获取实时图像并进行图像处理。
2.2 硬件需求●单片机控制模块。
●电机驱动模块。
●避障传感器模块。
●红外线传感器模块。
●摄像头模块。
●遥控器模块。
2.3 软件需求●单片机控制程序。
●图像处理算法。
●遥控器控制程序。
三、系统设计3.1 硬件设计3.1.1 单片机控制模块●选择合适的单片机控制模块,如Arduino、Raspberry Pi等。
●连接电机驱动模块、避障传感器模块、红外线传感器模块、摄像头模块等。
3.1.2 电机驱动模块●选择适合的电机驱动模块,如直流电机驱动器、步进电机驱动器等。
●连接电机驱动器与电机,控制小车的运动。
3.1.3 避障传感器模块●选择合适的避障传感器模块,如超声波传感器、红外线传感器等。
●连接避障传感器与单片机,实现避障功能。
3.1.4 红外线传感器模块●选择合适的红外线传感器模块,用于检测线路。
●连接红外线传感器与单片机,实现跟随线路功能。
3.1.5 摄像头模块●选择合适的摄像头模块,如USB摄像头、树莓派摄像头等。
●连接摄像头与单片机,获取实时图像。
3.1.6 遥控器模块●选择合适的遥控器模块,如无线遥控器等。
●连接遥控器与单片机,实现遥控操作功能。
3.2 软件设计3.2.1 单片机控制程序●编写控制程序,根据传感器的信号进行相应的处理,并控制电机驱动模块控制小车的运动。
基于单片机的智能灭火报警机器人设计和实现

基于单片机的智能灭火报警机器人设计和实现摘要随着科技的发展、社会的进步,人类不断创造着奇迹,工业的生产跟管理一步一步的前进,不断的创新。
多数控制和管理走进了自动化、信息化、智能化,智能化已经变成了科技发展的主要技术。
在很多工厂车间、工作现场环境比较恶劣的时候,人工不能完成的任务像货物的运输,寻找火源,灭火等,可以采用智能机器人来完成相应的任务,不但省时间,而且省人力。
根据工厂车间的实际日常需要,维持车间的正常运转,研究跟开发智能灭火报警机器人便具有了重大的意义。
本设计主要研究了智能的消防技术,智能机器人以AT89C52单片机为MCU,加上电源电路、驱动电路、火焰传感电路、红外传感器、灭火风扇、蜂鸣器以及其他电路组成。
电源电路为机器人正常工作提供了所需要的电能,驱动电路为机器人提供了可控制的移动,火焰传感电路是发现火源的主要硬件,红外传感器主要判断路况,灭火风扇完成灭火,蜂鸣器用来报警。
本作品对硬件组成进行了设计,并编写了软件程序框图,设计的机器人具有简单的灭火功能,实现了现场灭火。
关键词:AT89C52,驱动模块,单片机,火焰传感器IAbstractDesign of Intelligent of Elimination of FlameAlarm Robot on MCUAbstractWith the development of science and technology, social progress, human beings continue to create miracles with the management of industrial production forward step by step , and constant innovation . Most of the control and management into the automation, information, intelligence , intelligence has become a major technical technological development. In many factory workshop, job site environment is bad , I can not complete the task as artificial transport of goods , looking for the source of fire , fire , etc. , you can use intelligent robots to accomplish the task , not only save time, but also the provincial manpower. According to the actual needs of the factory floor daily to maintain the normal operation of the plant , with the development of intelligent fire alarm research robot will have a great significance.The intelligent design of the main study fire protection technology , intelligent robots to AT89C52 microcontroller MCU, plus the power supply circuit , driver circuit, flame sensing circuit , infrared sensors, fire fans, buzzers , and other circuit components. Providing the power to work the robot needs, provides the driving circuit of the mobile robot can be controlled , the flame sensing circuit hardware is found primarily an ignition source , the main infrared sensor to judge the road, the fire extinguishing power supply circuit for the fan to complete , with the buzzer to the police. The work on the hardware components were designed and prepared a block diagram of a software program to design robots with simple extinguishing function to achieve a live fire.Key words: The AT89C52,Driver Module,MCU,Flame sensor目录摘要 (I)ABSTRACT (II)第1章 绪论 (1)1.1智能灭火报警机器人的设计背景和意义 (1)1.2智能灭火报警机器人的目标 (1)1.3主要内容 (1)第2章 智能灭火机器人系统设计介绍 (2)2.1智能报警灭火机器人系统功能概述 (2)2.2系统工作原理 (2)2.3系统整体方案选择 (3)2.3.1 MCU的选择 (3)2.3.2 传感器的选择 (4)2.3.3 电源模块的选择 (5)2.4系统硬件总体设计 (6)2.5系统软件总体设计 (6)2.6本章小结 (6)第3章 系统硬件设计 (7)3.1电源模块 (7)3.2AT89C52与核心模块 (7)3.2.1AT89C52单片机介绍 (7)3.2.2 AT89C52最小系统硬件电路 (9)3.3电机驱动电路的设计 (9)3.4循迹与控制电路 (12)3.5.1红外测温传感器 (14)3.5.2红外测温传感器引脚 (15)3.6蜂鸣器报警电路 (16)3.7灭火风扇设计 (17)第4章 系统软件设计 (18)4.1软件开发平台介绍 (18)4.2PWM(脉宽调制) (18)4.3软件设计思路 (19)4.4系统主程序流程图 (20)4.5循迹程序流程图 (20)4.6电机驱动模块流程图 (21)4.7报警及灭火控制程序 (23)4.8避障程序流程图 (24)4.9本章总结 (25)第5章 系统功能调试 (26)5.1测试仪器及设备 (26)5.2功能测试 (26)5.2.1电源线路连接测试 (26)5.2.2 循迹功能测试 (26)5.2.3 避障功能测试 (27)5.2.4 灭火及报警功能测试 (27)5.3调试心得 (27)第6章 系统部分模块代码 (28)6.1初始化程序代码 (28)6.3延迟函数代码 (29)第7章 结 论 (30)参考文献 (31)致谢 (32)附录A (33)附录B (35)第1章 绪论1.1 智能灭火报警机器人的设计背景和意义在现实生活中,火灾是非常普遍的,被称作是三大自然灾害之一。
基于单片机的智能灭火小车设计

基于单片机的智能灭火小车设计摘要:如今,我国正处于经济迅猛发展的时期,人民的生活水平得到普遍提高,居住环境和生活环境也不断的改善,但同时,我国的消防安全隐患仍是个巨大的问题。
每年,我国的火灾事故频频出现,尤其是发生了重大火灾时,消防工作人员自身在抢救时也面临着生命的危险,甚至有时候根本无法达到目的地进行灭火抢救。
如何能在高效灭火的同时保障消防员的生命安全,是我们当今所考虑的问题,于是,当代人们想出了智能灭火小车,由机器代替人们进行一些不可完成的工作,同时也能减少生命和财产的损失。
关键词:智能灭火小车;MX1508;STC89C52引言基于单片机的智能灭火小车设计的研究背景,源于对火灾扑救效率和安全性的需求和对智能科技的追求。
通过单片机技术的应用,可以实现智能灭火小车的自主导航、实时感知、智能控制等功能,提高灭火效率和消防安全,同时也为智能科技的发展提供了基础和支撑。
本次设计的研究旨在设计一个基于单片机的智能灭火小车,能够实现火源的检测并且自动寻迹前往进行灭火。
并结合了蓝牙模块,可以实时向手机反馈小车的运转状况,也可以通过手机发送指令控制小车的运行。
1系统硬件介绍1.1单片机最小系统STC89C52单片机最小系统电路是一种基于STC89C52单片机的基本电路,包括STC89C52芯片、11.0592MHz晶振和复位电路。
晶振提供时钟信号,复位电路用于初始化单片机,为其提供稳定的工作环境,实现基本的操作和程序运行。
这个最小系统电路是STC89C52单片机开发和应用的基础。
1.2避障检测模块电路HC-SR04超声波检测模块是一种常用的超声波测距模块,包含超声波发射器和接收器。
它通过发射超声波脉冲并接收其回波来测量物体与模块之间的距离。
模块工作原理是通过发送一个短脉冲的超声波信号,然后计算从发射到接收回波的时间差来确定距离。
HC-SR04模块广泛应用于无人机、机器人、智能小车等领域,提供非接触式、精确的距离测量功能。
基于单片机的灭火智能小车的设计与实现

基于单片机的灭火智能小车的设计与实现
本论文设计了一种基于单片机控制的智能小车,旨在解决火灾现场的灭火问题。
小车具有远程控制和自主寻路的功能,并能够通过水泵系统进行喷洒灭火。
该小车使用了一款性能稳定、价格实惠的STM32F103C8T6单片机作为主控芯片,通过PWM信号控制直流电机实现小车的前进后退、转弯等方向控制操作。
小车的传感器模块采用了火焰传感器和超声波传感器,可对火灾现场进行实时监测,以实现自主寻路功能。
同时,设计了一套完整的水泵系统,将水储存在小车内并进行喷洒灭火操作。
经过测试,该智能小车的性能稳定,具有较好的使用效果,为火灾现场的灭火工作提供了有效的帮助。
基于单片机的智能搜救小车

摘要本小组设计制作的一款智能救援小车,能够实现2008年山东省电子设计竞赛G题的基本部分和发挥部分的所有功能要求。
另外具有以下扩展功能功能:测温、无线遥控、测速及里程、测量路面坡度。
本作品以两个直流减速电机为驱动,通过各类传感器件来采集信息,送入主控单元STC 89C52单片机,处理数据后完成相应的操作,以实现相应的功能。
直流减速电机采用电机专用驱动芯片L293D进行驱动,其中避障采光电开关来完成;用RPR220型光电对管完成系统循迹功能;铁片检测部分通过电感式接近开关铁片进行信号的采集,接近开关反馈的信号送入单片机处理,由控制单元处理信号并控制相应的线圈,利用线圈用电产生磁场的效应捡起铁片并转移到题目中所指定的区域,由语音提示电路提示小车操作完成。
实现了智能救援小车在无人控制状态下实现智能避障、路面循迹、检测并转移金属铁片的智能控制,语音提示,液晶显示电路显示运行的时间。
其所实现的功能相当于简易机器人。
关键词:基本部分和发挥部分、测温、无线遥控、测速及里程、测量路面坡度目录一、设计任务概述1.1设计任务概述设计制作一个智能小车,该小车能按照要求自动运行,通过一个建筑物中曲折的道路,并完成规定的动作。
设矩形建筑物有两个门A、B,门宽24厘米,建筑物的墙壁是10厘米高(或与小车高度相同)、2厘米厚的矮墙,建筑物内无引导轨迹(见图示)。
1.2基本任务1、要求智能小车从A门进入并开始自动计时,从B门出来,在行进过程中,能自动选择适当的路径,避开墙壁,找到通路,三分钟之内到达B门;2、到达B门,停5秒,小车自动计时并数字显示AB段所用的时间,并声光报警;1.3发挥部分1、自B门外,循弧形引导轨迹BC前进(引导轨迹为2厘米宽);2、途中检测到铁片D(铁片D放置在轨迹BC前二分之一段上的任意位置)时停车3秒,并声光报警;3、要求小车拾起铁片D,继续沿引导轨迹前进;4、到达C点;5、在C点处,放下铁片D并停止前进。
基于单片机智能灭火小车控制系统设计

本科毕业设计(论文)基于单片机智能灭火小车控制系统设计学生学院信息工程学院专业测控技术与仪器(光机电一体化方向)年级班别20级(1)班学号学生姓名指导教师20 年5月摘要如今,我国正处于经济迅猛发展的时期,人民的生活水平得到普遍提高,居住环境和生活环境也不断的改善,但同时,我国的消防安全隐患仍是个巨大的问题。
每年,我国的火灾事故频频出现,尤其是发生了重大火灾时,消防工作人员自身在抢救时也面临着生命的危险,甚至有时候根本无法达到目的地进行灭火抢救。
如何能在高效灭火的同时保障消防员的生命安全,是我们当今所考虑的问题,于是,当代人们想出了智能灭火小车,由机器代替人们进行一些不可完成的工作,同时也能减少生命和财产的损失。
本文是对智能灭火小车控制系统进行了说明和设计,使用C52单片机作为核心来控制小车,利用C语言程序进行相应的指令操作,实现对智能小车每方面的模块进行了控制;此次课设包含了设计电源电路、电机驱动电路、火焰检测电路、灭火风扇以及其它辅助电路,并将它们加以组合成为灭火小车,其中电源电路提供工作时系统所需要的电源,电机驱动电路则使用电机驱动芯片L298N驱动电机控制智能小车的前进后退以及转向,并使用火焰电阻传感器作为核心检测模块,进行火焰探测,再探测到火源时使用相关程序驱动USB风扇进行灭火等相关操作。
关键词:智能灭火小车,电机驱动芯片L298N,火焰电阻传感器,C52单片机AbstrackNowadays, our country is in the period of rapid development of economy, people's living standards improved universally, living environment and living environment has been improved, but at the same time, hidden danger of fire safety in our country is still a huge problem. Every year, our country's fire accident appeared frequently, especially when the big fire broke out, fire during the rescue staff itself is faced with the risk of life, sometimes even can not reach the destination for fire fighting and rescue. How can the effective fire at the same time to ensure the safety of a fireman's life, is our today's consider problems, so the contemporary people come up with intelligent fire-fighting vehicles, by machines instead of people to work for some impossible, at the same time also can reduce losses of life and property. This paper is on the intelligent car control system specification and design, use C52 as the core to control the car, using C language program for the corresponding instruction operation, realize the intelligent car control every aspect of the module; The class set design includes power circuit, motor drive circuit, flame detection circuit, fire fan and other auxiliary circuit, and to combine them into the fire fighting vehicles, including power supply circuit for work when the system power supply, motor drive circuit is used motor driver chip driver motor control of the intelligent car forward back and turned, and use the flame resistance sensor as the core detection module, flame detection, relevant procedures are used to detect fire source drive USB fan for fire fighting and related operations.Key words: Smart fire extinguishing car, light sensor sensor, C52 single chip目录1 绪论 (1)1.1 灭火小车控制系统的设计背景和意义 (1)1.2 国内国际研究现状 (1)1.3 灭火小车控制系统的目标 (4)2 灭火小车控制系统介绍 (5)2.1 灭火小车控制系统功能概述 (5)2.2 系统工作原理 (6)2.3 主要设计内容 (6)2.4 本章小结 (6)3 系统硬件设计 (7)3.1 硬件设计框图 (7)3.2 硬件设计及主控芯片介绍 (7)3.2.1 AT89C52主控芯片介绍 (8)3.2.2 驱动电机系统方案设计 (10)3.2.3 火焰检测系统设计 (12)3.2.4 车体方案设计 (13)3.2.5 风扇模块设计 (14)3.3 本章小结 (15)4 系统软件设计 (16)4.1 软件设计思路 (16)4.2 系统程序流程图 (16)4.2.1 驱动电机模块程序流程图 (17)4.2.2 灭火流程图 (18)4.3 软件实现 (20)4.3.1 软件开发平台介绍 (20)4.3.2 各功能模块软件程序设计 (20)驱动电机模块主程序: (20)风扇模块主程序: (22)延时子程序 (24)4.4 本章小结 (24)结论 (25)致谢 (26)参考文献 (27)附录1程序代码 (28)1 绪论1.1 灭火小车控制系统的设计背景和意义火灾的发生在我们的生活当中可以说极为常见,我们也时常听到某地发生了火灾,有多少人遇害,这足够引起了我们的重视。
基于单片机的消防智能小车设计

基于单片机的消防智能小车设计引言智能小车是以铝合金为车架,AT89S52单片机为控制核心,加以直流电机、舵机、光电传感器、火焰传感器和电源电路以及其他电路构成。
系统由89S52通过IO口控制小车的前进后退以及转向。
舵机带动灭火风扇左右转向摆动进行灭火。
寻迹由RPR220型光电对管完成,远红外火焰传感器进行火焰扫描。
同时本系统用凌阳单片机进行语音的播报,以提示当前状态。
本系统同时通过DF无线数据收发模块进行无线数据传输,将该车当前的状态远程传送给显示台。
显示台由OCMJ4X8C液晶屏和2个按键进行实时状态显示和启动控制。
设计任务设计制作一个消防智能小车模型,能到制定区域进行抢险灭火工作。
以蜡烛模拟火源,随机分布在场地中,场地如下图所示:场地示意图设计要求1、智能小车从安全区域启动,自动寻找到火源并显示。
2、除安全区外,场地随机出现2个火源,要求智能小车能够发现其中一个火焰并将其完全扑灭。
3、能够发现并扑灭第二个火焰。
4、扑灭二个火焰的总时间不超过5分钟。
5、能够自动计算和显示扑灭的火源数。
设计方案1、采用AT89S52单片机作为主控制器。
2、用3节锂电池为直流电机供电,用两组每组两节电池分别为单片机传感器和舵机供电。
3、用RPR220型光电对管进行寻迹。
4、远红外火焰传感器作为本系统的火焰传感器。
5、L298N作为直流电机的驱动芯片。
6、凌阳61B板作为语音控制模块。
7、DF无线收发模块用来远程传输数据。
8、4X8的LCD在远程控制台实时显示小车当前状态。
系统的结构框图如下图所示:系统结构框图主程序流程图我们所设计的软件的主程序流程图如下图所示:主程序流程图。
基于STM32单片机的智能消防小车张晓娜卢彦明徐杰王赛指导老师
基于STM32单片机的智能消防小车张晓娜卢彦明徐杰王赛指导老师发布时间:2023-06-05T02:53:57.128Z 来源:《中国科技信息》2023年6期作者:张晓娜卢彦明徐杰王赛指导老师[导读] 随着人们生产活动的增加,全球各地频发的火灾给人们带来了巨大的生命威胁与财产损失。
为了实现火灾的早期预警,在火灾发生的第一时间展开扑救工作减小人员伤亡与财产损失,我们设计了一种可以自动避障并进行报警和灭火的智能消防小车,无需人力,即可通过小车巡视工厂、仓库等易燃场所的消防安全情况,解决了火灾的早期预警与扑救工作等问题,具有较高的实际生产应用价值。
宿州学院机械与电子工程学院安徽宿州 234000摘要:随着人们生产活动的增加,全球各地频发的火灾给人们带来了巨大的生命威胁与财产损失。
为了实现火灾的早期预警,在火灾发生的第一时间展开扑救工作减小人员伤亡与财产损失,我们设计了一种可以自动避障并进行报警和灭火的智能消防小车,无需人力,即可通过小车巡视工厂、仓库等易燃场所的消防安全情况,解决了火灾的早期预警与扑救工作等问题,具有较高的实际生产应用价值。
关键词:STM32单片机、北斗GPS模块、OPEN MV1 设计背景及目的在当今这个智能化、互联化的时代,智能消防小车的应用已经成为一个必然的趋势。
与传统消防模式相比,智能消防小车具有时效性高、活动范围大、反应速度快等特点,可以自动寻找火源并利用电磁水泵对火灾现场展开扑救。
不仅可以在第一时间投入灭火工作,为火灾的扑救工作争取宝贵的时间,也可以代替人力在火场一线冲锋在前,大大降低了火灾中人员伤亡的概率。
随着物联网技术的发展,传统消防向智慧消防的转变已成为当下消防工作的主要发展方向,而智能消防小车的生产应用将为我国智慧消防建设起到深远的推动作用。
2 基本设计思路本智能消防小车是由STM32F103单片机作为核心板,由Open MV4摄像头、北斗GPS双模定位模块、ESP8266 WIFI透传模块、电磁水泵等共同组成。
基于STM32单片机的智能消防小车系统

基于STM32单片机的智能消防小车糸统于波,王慧(东北石油大学电子科学学院,黑龙江大庆163000)摘要:针对目前市场易燃易爆仓库、大型石化企业存在意外起火的情况,为了尽可能地降低人员伤亡和财产损失,该文设计出一款高压喷水式智能消防小车系统。
该系统采用STM32单片机作为主控制器,用反射型光电探测器RPR-220二极管进行循迹避障。
在行驶过程中,灭火智能小车沿着设计好的路线,通过红外光电传感器感应光源以检测火焰具体位置,可以利用算法设计对循迹灭火,该模式下驱动电机水泵喷水,相对于风扇灭火有效地控制了火源的第二次发生,从而完成消防作业。
经实际测试实验,该智能灭火小车能够在不同模式下快速、顺利地完成相应的功能。
关键词:智能消防车;STM32;光电探测器;循迹灭火中图分类号:TP249文献标识码:A文章编号#1000-0682(2020)04-0117-05 Intedigeet firr fighting trolley system based on STM32microcontrollerYU Bo,WANG Hui(School时College时Electrooic Science,NortOecst Petroleum University,Heilongjiang Daqing163000,China# Abstract:Aiming at tha accidentat fire of inOammabta and explosive warehousas and larva petra-enWrpasvs in tha market at present,in ordvr to reduco cosualties and propety lossas as much as possibta,a high pressure watvr spraying intelligent fire fighting cor system is designed.STM32microcon-io o e@asihemaon oonio o e@used on ihossysiem,usong etoeoioeephoioeoeoioodeieoio@doodeto@iaoong obstacta avoidanco,RPR-220in tha proces s of moving,Ora一Oghting intelligent cor along tha designed routs,tUrough tUv infrared WeclWc induction light source detection sensor location,con taka advontaga of the algorithm design of tracing extinguishing fire and dive motor pump water spray, this mode to compkte work.After the actuat Wst,tUv Ore extinguishing intelligent vehida on complete the corresponding functions in ddferent modes qudkiy and smoothly.Keywords:intelligent fire engine;STM32;photodetector;tracing the fire fighting0引言随着我国城市化的不断提升,大量石化企业和大型工厂的兴起,在发生普通火灾时,工作人员不易及时发现从而导致灾情的愈来愈烈[1])为此,开发出一款智能设备实时监测火灾带来的隐患,为企业大大降低了财产损失的风险,更加有效地控制了人员的伤亡[2]。
多功能智能救援小车的设计
目录摘要.........................................................................................................1关键词......................................................................................................1 Abstract (1)K e y words (1)引言.........................................................................................................2 1多功能智能救援的概述 (2)1.1课题背景…………………………………………………………………………………21.2多功能智能救援车的技术概况 (2)1.3多功能智能救援小车的研究目的和研究意义 (3)2.方案的比较与选择 (3)2.1小车的车体选择 (4)2.2小车主控芯片的选择 (4)2.3小车自动循迹模块的选择 (5)2.4小车金属检测装置的选择 (6)2.5小车金属捡取装置的选择 (6)2.6小车避障模块的选择 (7)2.7小车显示模块的选择 (8)2.8方案的最终选定 (8)3硬件系统的具体设计与实现 (8)3.1智能救援车最小控制模块的设计 (8)3.1.1最小系统中时钟电路的设计 (9)3.1.2最小系统中复位电路的设计 (9)3.2智能救援车电源模块的设计 (10)3.2.1单片机供电稳压模块设计 (10)3.2.2驱动电路与其他模块稳压的设计 (10)3.3智能救援车电机驱动模块的设计 (11)3.4智能救援车循迹避障模块的设计 (13)3.4.1智能救援车循迹模块的设计 (13)3.4.2智能救援车避障模块的设计 (15)3.5智能救援车检测金属和转移金属模块设计 (16)3.5.1智能救援车检测金属模块的设计 (16)3.5.2智能救援车捡取金属模块的设计 (16)3.6智能救援车显示模块的设计 (17)4系统的软件设计 (18)4.1调速模块的设计 (19)4.2液晶显示模块的设计 (19)4.3小车检测与捡取金属程序流程图的设计 (21)4.4避障模块流程图的设计 (21)4.5循迹模块流程图的设计 (22)5结论 (22)参考文献 (24)附录 (25)致谢 (28)多功能智能救援小车的设计机械电子工程赵立民指导老师杨桂林摘要:本设计是以STC89C52为核心控制单片机,外部搭设了各种传感器、机械手和太阳能电池板。
基于单片机智能小车

P3.0-P3.1 连接电机驱动L298N芯片两个使能端
P3.2
外部中断,连接红外接收器的输出端
VCC
接+5V电源
GND
接地
电源模块
电源是一种为用电设备提供能量的装置,其性能的好坏会 直接影响到整个系统的稳定性与可靠性因此电源的好坏非常 重要。在整个智能车系统中,不同芯片与器件所需要提供的 电压是不同的,在这里我采用双电源供电的方式,使用4节 1.2V可充电电池为直流电机供电,将9V可充电方块电源通过 三端稳压器LM7805降至5V,为AT89C52单片机和LCD1602显示 芯片供电,以提高整个小车系统可靠性与稳定性。
循迹电路软件分析 P1.6
P1.5
MG2
MG1
单片机通过电机驱动电路控制小车运行方法
P2.3 P2.2 P2.1 P2.0
P1.7 P1.6 P1.5
前 方
左 轮
左 电 机
电机 右 驱动 电 电路 机
P1.7 0 右
轮
1
1
10 01 10
1 前进 0 后退 1 左转弯
101
0
11
1 右转弯
单片机 万向滑轮
本次设计的智能小车是沿黑线行驶的,由于黑纸和白色纸质地板对光线的
反射系数不同,因此可以通过反射光的强弱来使小车沿着黑线行驶。其具体工 作过程如下:小车沿白色纸质地板行驶,安装在小车下的红外发光二极管发射 红外线信号,遇到白线时,红外线会被反射回来,被光敏三极管吸收,光敏三 极管将会被导通,比较器输出低电平;遇到黑线时,红外线信号被黑色吸收, 不会反射回来光敏三极管处于截止状态,比较器输出高电平。将检测到的信号 送到单片机I/O口,当I/O口检测到高电平的信号时,表明红外线信号被黑色吸 收,小车正在沿黑线行驶,没有偏离轨道;当I/O口检测到低电平的信号时,表 明红外线被反射回来,被光敏三极管吸收,小车检测到了白色,已偏离了轨迹, 需要调用循迹子程序来纠正轨迹。左边检测到白色时小车右转、右边检测到白 色时小车左转、两边都检测到白色时小车会自动停车、两边都检测不到白线时, 表明小车正在沿着预定轨迹行驶,没有偏离轨迹。
基于STM32 的喊话救援小车设计
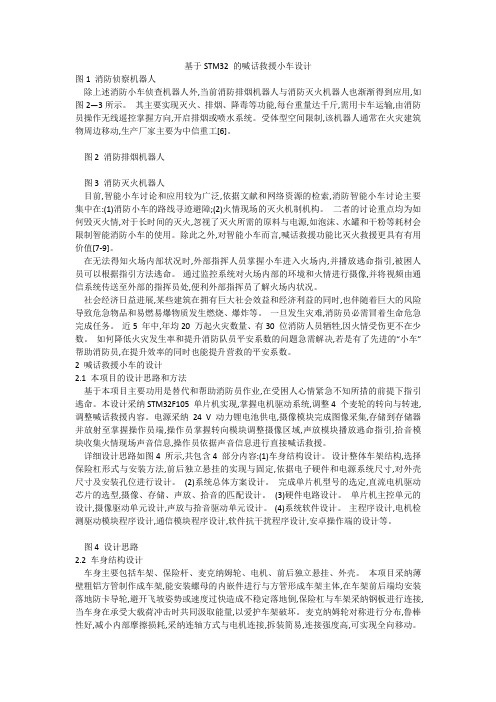
基于STM32 的喊话救援小车设计图1 消防侦察机器人除上述消防小车侦查机器人外,当前消防排烟机器人与消防灭火机器人也渐渐得到应用,如图2—3所示。
其主要实现灭火、排烟、降毒等功能,每台重量达千斤,需用卡车运输,由消防员操作无线遥控掌握方向,开启排烟或喷水系统。
受体型空间限制,该机器人通常在火灾建筑物周边移动,生产厂家主要为中信重工[6]。
图2 消防排烟机器人图3 消防灭火机器人目前,智能小车讨论和应用较为广泛,依据文献和网络资源的检索,消防智能小车讨论主要集中在:(1)消防小车的路线寻迹避障;(2)火情现场的灭火机制机构。
二者的讨论重点均为如何毁灭火情,对于长时间的灭火,忽视了灭火所需的原料与电源,如泡沫、水罐和干粉等耗材会限制智能消防小车的使用。
除此之外,对智能小车而言,喊话救援功能比灭火救援更具有有用价值[7-9]。
在无法得知火场内部状况时,外部指挥人员掌握小车进入火场内,并播放逃命指引,被困人员可以根据指引方法逃命。
通过监控系统对火场内部的环境和火情进行摄像,并将视频由通信系统传送至外部的指挥员处,便利外部指挥员了解火场内状况。
社会经济日益进展,某些建筑在拥有巨大社会效益和经济利益的同时,也伴随着巨大的风险导致危急物品和易燃易爆物质发生燃烧、爆炸等。
一旦发生灾难,消防员必需冒着生命危急完成任务。
近5 年中,年均20 万起火灾数量、有30 位消防人员牺牲,因火情受伤更不在少数。
如何降低火灾发生率和提升消防队员平安系数的问题急需解决,若是有了先进的“小车”帮助消防员,在提升效率的同时也能提升营救的平安系数。
2 喊话救援小车的设计2.1 本项目的设计思路和方法基于本项目主要功用是替代和帮助消防员作业,在受困人心情紧急不知所措的前提下指引逃命。
本设计采纳STM32F105 单片机实现,掌握电机驱动系统,调整4 个麦轮的转向与转速,调整喊话救援内容。
电源采纳24 V 动力锂电池供电,摄像模块完成图像采集,存储到存储器并放射至掌握操作员端,操作员掌握转向模块调整摄像区域,声放模块播放逃命指引,拾音模块收集火情现场声音信息,操作员依据声音信息进行直接喊话救援。
基于单片机控制的智能灭火小车模型设计
基于单片机控制的智能灭火小车模型设计发布时间:2021-02-26T11:23:22.260Z 来源:《科学与技术》2020年第29期作者:王煊,肖程文,黄仕灿,朱俊懿,瞿俊杰,罗浩* [导读] 工厂由于电路老化或操作不规范,时常导致火灾发生,造成极大损失。
王煊,肖程文,黄仕灿,朱俊懿,瞿俊杰,罗浩*武汉商学院机电工程学院,湖北武汉 430056摘要:工厂由于电路老化或操作不规范,时常导致火灾发生,造成极大损失。
本文以此为背景,设计了一款智能灭火小车。
采用单片机STC89C52RC控制,电机驱动芯片L2930驱动。
采用红外传感器和火焰传感器收集环境参数,实现智能灭火小车的循迹、避障、障碍物跟随和火焰识别。
程序设计方面,以C语言在Keil开发环境下进行控制程序编写。
硬件设计方面,使用立创EDA进行元器件的选型,电路图设计,PCB图设计和BOM表生成。
最终实验测试表明:本设计的智能灭火小车能自动避障,并能够快速、精确的行驶到火源点,打开灭火风扇将其扑灭。
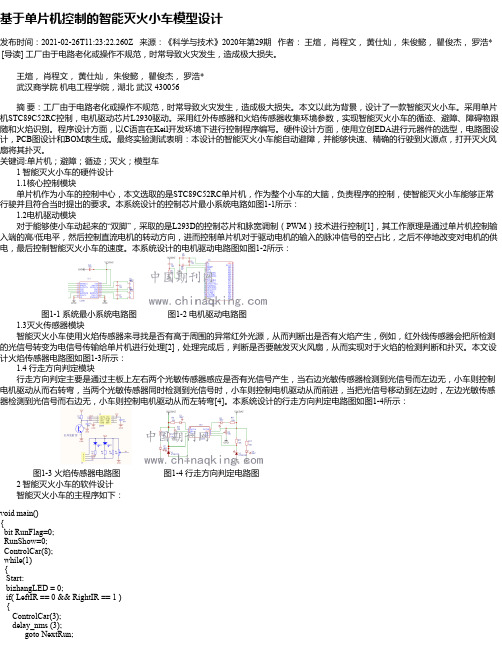
关键词:单片机;避障;循迹;灭火;模型车 1 智能灭火小车的硬件设计 1.1核心控制模块单片机作为小车的控制中心,本文选取的是STC89C52RC单片机,作为整个小车的大脑,负责程序的控制,使智能灭火小车能够正常行驶并且符合当时提出的要求。
本系统设计的控制芯片最小系统电路如图1-1所示: 1.2电机驱动模块对于能够使小车动起来的“双脚”,采取的是L293D的控制芯片和脉宽调制(PWM)技术进行控制[1],其工作原理是通过单片机控制输入端的高/低电平,然后控制直流电机的转动方向,进而控制单片机对于驱动电机的输入的脉冲信号的空占比,之后不停地改变对电机的供电,最后控制智能灭火小车的速度。
本系统设计的电机驱动电路图如图1-2所示:图1-1 系统最小系统电路图图1-2 电机驱动电路图 1.3灭火传感器模块智能灭火小车使用火焰传感器来寻找是否有高于周围的异常红外光源,从而判断出是否有火焰产生,例如,红外线传感器会把所检测的光信号转变为电信号传输给单片机进行处理[2],处理完成后,判断是否要触发灭火风扇,从而实现对于火焰的检测判断和扑灭。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8 结论 基于单片机,我们设计了一种简易机器人救援小车,通过现演示说明,我们的设计具有一定的价值和实用性。
5 越障部分 越障无疑是这款智能救援机器人的突出特色。传统的救援机器人把重点都放在了如何救援,而忽略了路途的险恶,致使救援机器人有去无回。我们充分认识到这一点,在越障部分做了相当大的改进。三个车轮通过齿轮啮合组成一个大的车轮,当超声波模块检测障碍物时,整个大的车轮翻转,使其顺利越过障碍物,到达目的地,。
2 控制模块 智能救援小车最重要的部件,也就是它的大脑--中央处理系统。它不仅负责将环境图像采集部分送来的图像数据进行处理,还要将这些信息转化成为电机的驱动控制信号,使整车按照预定的规则前行,同时还要对其他一些辅助设备进行控制。这些一般单片机都可以实现,而对于行驶在错综复杂环境当中的救援小车来说,有一点很重要,那就是对外界的抗干扰能力要强,于是我们选择Microchip公司的8位微控制器PIC。该控制器除了刚才说的抗干扰能力强之外,还具有速度快、移植性好等优点。3 电源模块 救援小车整体采用可充电蓄电池供电。由于微控制器、摄像头以及电机的工作电压是不同的,我们准备了两套解决方案:一是使用模拟电路进行稳压;二是使用专门的集成稳压芯片。通过实际操作以及比较,最终选择了第二种方案。其主要优点是:a.外围电路简单,只需简单的滤波即可;b.可提供稳定的输出电压;c.制作简单、成本低。供电系统框图。
6 现场采集部分 救援现场环境复杂,存在许多潜在危险,救援人员恐难进入,但救援人员又必须准确掌握现场的环境,为救援工作创造有利的条件。通过高清摄像头很好地解决了上述问题。为了实现多方位拍摄现场画面,使用舵机来控制它的旋转角度,减速电机控制它的升降。然后,画面通过无线视频传输模块发送到上位机界面上,以供救援人员参考。7 生命探测模块 生命探测模块也是救援机器人不可或缺的部分,因为要想救援伤员,首先需要探测伤员的位置,这就需要生命探测模块了。 BISS0001是一款高性能的传感信号处理集成电路。静态电流极小,配以热释电红外传感器和少量外围元器件即可构成被动式的热释电红外传感器。原理图。
基于单片机的智能救援机器人小车设计
摘要:设计了一种简单的基于单片机的智能救援机器人小车,设计简单,易于实现,通过现场演示,我们的设计取得了不年地震灾害频频发生,危害较大的是2008年我国的汶川大地震和今年的日本大地震,期间全世界不知又有多少危害较小的地震,这些地震带给人们的是惨痛的伤亡和巨大的经济损失。我们不能够阻挡地震事件的发生,但我们能做的还有很多,其中对伤员的救援就是一项重要的工作。 当然,灾后环境错综复杂,这对救援工具的要求是一种挑战,同时对灾后生命的探测也是一个很重要的问题。基于这两点,我们设计了一种简易的智能救援机器人小车,通过现场演示,取得了不错的效果。1 智能小车总体框架 总体框架可以分为三大部分:环境图像采集部分、电机驱动部分和中央数据处理部分,系统框图。
由于摄像头需要一个9~12V的电压才能正常工作,而充电电池的电压只有6~7.2V。所以DC-DC升压电路便成为必需。DC-DC电压变换采用MC34063A集成电路,该器件内部集成了温度补偿器、比较器、动态电流带限占空比可控的振荡器和一个高电流输出驱动器。4 电机驱动模块 驱动机器人行走的两个电机需要不同的转速来实现转弯。选用的驱动芯片为L293D,它包含4个输出通道,最大输出峰值电流为12A,能同时驱动两个直流电机工作;其信号输入端和使能端接收到来自单片机的信号,控制电机的通断以及正、反转,还可以通过向使能端输入不同占空比的方波信号来调整电机转速(PWM方式)。,IN端口接控制信号,OUT端口接电机的两端,EN端口接使能信号。一组IN端口输入为高/低或低/高电平时,能实现电机的正/反转。一组IN端口输入均为高或低电平时,电机将停转。EN使能端为高电平时,相应端口输入信号有效;反之,则输入信号无效。在EN端输入PWM波,通过调整PWM波的占空比,即可实现电机的无级调速。