对ansys主要命令的解释
ANSYS命令大全及中文注解
ANSYS命令大全及中文注解ANSYS命令大全1. A,P1,P2,…,P17,P18(以点定义面)2. AADD,NA1,NA2,…NA8,NA9(面相加)3. AATT,MAT,REAL,TYPE,ESYS,SECN(指定面的单元属性)【注】ESYS为坐标系统号、SECN为截面类型号。
4. *ABBR,Abbr,String(定义一个缩略词)5. ABBRES,Lab,Fname,Ext(从文件中读取缩略词)6. ABBSAVE,Lab,Fname,Ext(将当前定义的缩略词写入文件)7. ABS,IR,IA,--,--,Name,--,--,FACTA(取绝对值)【注】*************8. ACCAT,NA1,NA2(连接面)9. ACEL,ACEX,ACEY,ACEZ(定义结构的线性加速度)10. ACLEAR,NA1,NA2,NINC(清除面单元网格)11. ADAMS,NMODES,KSTRESS,KSHELL【注】*************12. ADAPT, NSOLN, STARGT, TTARGT, FACMN, FACMX, KYKPS, KYMAC【注】*************13. ADD,IR, IA, IB, IC, Name, --,-- , FACTA, FACTB, FACTC(变量加运算)14. ADELE,NA1,NA2,NINC,KSWP(删除面)【注】KSWP =0删除面但保留面上关键点、1删除面及面上关键点。
15. ADRAG,NL1,NL2,…,NL6,NLP1,NLP2,…,NLP6(将既有线沿一定路径拖拉成面)16. AESIZE,ANUM,SIZE(指定面上划分单元大小)17. AFILLT,NA1,NA1,RAD(两面之间生成倒角面)18. AFSURF,SAREA,TLINE(在既有面单元上生成重叠的表面单元)19. *AFUN, Lab(指定参数表达式中角度单位)20. AGEN, ITIME, NA1, NA2, NINC, DX, DY, DZ, KINC, NOELEM, IMOVE(复制面)21. AGLUE,NA1,NA2,…,NA8,NA9(面间相互粘接)22. AINA,NA1,NA2,…,NA8,NA9(被选面的交集)23. AINP,NA1,NA2,…,NA8,NA9(面集两两相交)24. AINV,NA,NV(面体相交)25. AL,L1,L2,…,L9,L10(以线定义面)26. ALIST,NA1,NA2,NINC,Lab(列表显示面的信息)【注】Lab=HPT时,显示面上硬点信息,默认为空。
ANSYS常用命令详解
ANSYS常用命令详解1、AA,P1,P2,........P18 连接点生成面P1-P18 生成面的点号(用键盘输入,最多18个),最少3个,如果p1=p,可以在图中拾取(仅在GUI中有效),注意: 点p1到p18一定按顺时针或逆时针方向沿面顺序输入,这个顺序也确定了面的法线正向(按右手法则)。
面包含相邻点间已生成的线,如果两点间不只存在一条线,将用最短的一条。
如果生成面的点大于4个,要求点和线在当前坐标系下坐标为常值(如面或柱)。
建议环形坐标系下实体建模不用此命令。
菜单:main>preprocessor>modeling>create>area>arbitrary>through KPs2、AADDAADD, NA1, NA2, NA3, NA4, NA5, NA6, NA7, NA8, NA9将分开的面相加生成一个面NA1, NA2,...为原来的面note:要相加的面要是共面的,相加后生成新面,原来的面将被删除,菜单:Main Menu>Preprocessor>Modeling>Operate>Booleans>Add>Areas3、AATTAATT, MAT, REAL, TYPE, ESYS, SECN指定所选的未划分网格的面的单元属性。
PREP7: MeshingMP ME ST DY <> PR EM <> FL PP EDMAT:指定给所选的未划分网格的面的材料号。
REAL:指定给所选的未划分网格的面的实常数号。
TYPE:指定给所选的未划分网格的面的单元类型号。
ESYS:指定给所选的未划分网格的面的坐标系号。
SECN:指定给所选的未划分网格的面的区域号。
注释:从所选的面中生成的面也将具有这些属性。
当面划分网格时将使用这些单元属性。
如果一个面在划分网格时,没有用此命令指定属性,那么该面的属性由当前的MAT,REAL,TYPE,ESYS,SECNUM命令的设置确定。
ANSYS 命令流解释大全
vsel,a,volu,,17,23,2
上面的命令选中了实体编号为 14,17,19,21,23的五个实体
u rforce, nvar, node, item, comp, name 指定待存储的节点力数据
nvar: 变量号
node: 节点号
item comp
F x, y.z
mu: 摩擦系数
dens: 质量密度
mat: 材料编号(缺省为当前材料号)
c 材料特性值,或材料之特性,温度曲线中的常数项
c1-c4: 材料的特性-温度曲线中1次项,2次项,3次项,4次项的系数
二、定义DP材料:
首先要定义EX和泊松比:MP,EX,MAT,……
MP,NUXY,MAT,……
定义DP材料单元表(这里不考虑温度):TB,DP,MAT
!第二个(或后继)载荷步:
TIME,...
ESEL,...
EKILL,... !杀死选择的单元
ESEL,...
EALIVE,... !重新激活选择的单元
...
FDELE,... !删除不活动自由度的结点载荷
D,... !约束不活动自由度
...
F,... !在活动自由度上施活的自由度上的约束
Command:EKILL
GUI: Main Menu>Solution>-Load Step Opts-Other>Kill Elements
用下列命令重新激活单元:
Command: EALIVE
GUI: Main Menu>Solution>-Load Step Opts-Other>Activate Elem
SAVE
ANSYS的最常用的命令解释
Aa,1,2,4,3(由关键点生成面,注意关键点的顺序不能乱)accat,na1,na2由多个面连结生成一个面,以便于体的映射网格划分。
详见lccatadd,加运算,只能对二维和三维图形用此命令,分为aadd和vaddaadd,注意与ovlap(搭接)命令的区别Acel,0,10,0(在y方向施加重力加速度,相当于考虑结构自重。
在模型上施加重力时,一般输入10或9.8,而不是-10或-9.8)aclear,all(删除与所选面相关的节点和单元),见kclearadele,na1,na2,ninc,1(删除所选择的面,na1表示要删除的起始面,na2表示要删除的终止面,ninc表示增量,1表示删除面及附在该面上而不依附于其它实体的线、关键点,此处为0时则仅删除面);删除所有选择的面时:adele,all,,,1;类似的还有kdele,ldele(只能删除没有划分网格的线段),ndele,edele等;Adrag,nl1,nl2,nl3,nl4,nl5,nl6,nlp1,nlp2,nlp3,nlp4,nlp5,nlp6由nl1…nl6沿着nlp1…nlp6扫掠生成面。
nl1…nl6相当于准线,nlp1…nlp6相当于母线。
如adrag,1,,,,,,2,3表示由线1沿着线2、3生成面aesize,all,27(指定面上划分单元大小,all表示对所有的面指定单元大小,也可以选择面的编号,27表示单元最大尺寸)AL,L1,L2,L3,L4,L5,L6,L7,L8,L9,L10此命令由已知的一组直线(L1,…L10)围绕成面(Area),至少须要3条线才能形成面,线段的号码没有严格的顺序限制,只要它们能完成封闭的面积即可。
同时若使用超过4条线去定义面时,所有的线必须在同一平面上,以右手定则来决定面积的方向。
如果L1为负号,则反向。
Paths:Main Menu>Preprocessor>Create>Arbitrary>By Linesallsel,all,all(选择所有实体类型,后面两个all为系统默认,可以省略;第二选项还可以为below,第三选项还可以volu、area、line、kp、elem、node。
ansys命令流中文说明
ansys命令流中文说明展开全文KB、KE: 待划分线的定向关键点起始、终止号SECNUM: 截面类型号u SECPLOT,SECID,MESHKEY 画梁截面的几何形状及网格划分SECID:由SECTYPE命令分配的截面编号MESHKEY:0:不显示网格划分1:显示网格划分u /ESHAPE, SCALE 按看似固体化分的形式显示线、面单元SCALE: 0:简单显示线、面单元1:使用实常数显示单元形状u esurf, xnode, tlab, shape 在已存在的选中单元的自由表面覆盖产生单元xnode: 仅为产生surf151 或surf152单元时使用tlab: 仅用来生成接触元或目标元top 产生单元且法线方向与所覆盖的单元相同,仅对梁或壳有效,对实体单元无效Bottom产生单元且法线方向与所覆盖的单元相反,仅对梁或壳有效,对实体单元无效Reverse 将已产生单元反向Shape: 空与所覆盖单元形状相同Tri 产生三角形表面的目标元注意:选中的单元是由所选节点决定的,而不是选单元,如同将压力加在节点上而不是单元上u Nummrg,label,toler, Gtoler,action,switch 合并相同位置的itemlabel: 要合并的项目node: 节点, Elem,单元,kp: 关键点(也合并线,面及点)mat: 材料,type: 单元类型,Real: 实常数cp:耦合项,CE:约束项,CE: 约束方程,All:所有项toler: 公差Gtoler:实体公差Action: sele 仅选择不合并空合并switch: 较低号还是较高号被保留(low, high)注意:可以先选择一部分项目,再执行合并。
如果多次发生合并命令,一定要先合并节点,再合并关键点。
合并节点后,实体荷载不能转化到单元,此时可合并关键点解决问题。
u Lsel, type, item, comp, vmin, vmax, vinc, kswp 选择线type: s 从全部线中选一组线r 从当前选中线中选一组线a 再选一部线附加给当前选中组aunoneu(unselect)inve: 反向选择item: line 线号loc 坐标length 线长comp: x,y,zkswp: 0 只选线1 选择线及相关关键点、节点和单元u Nsel, type, item, comp, vmin, vmax, vinc, kabs 选择一组节点为下一步做准备Type: S: 选择一组新节点(缺省)R: 在当前组中再选择A: 再选一组附加于当前组U: 在当前组中不选一部分All: 恢复为选中所有None: 全不选Inve: 反向选择Stat: 显示当前选择状态Item: loc: 坐标node: 节点号Comp: 分量Vmin,vmax,vinc: ITEM范围Kabs: “0” 使用正负号“1”仅用绝对值u NSLL,type, nkey 选择与所选线相联系的节点u nsla, type, nkey: 选择与选中面相关的节点type:s 选一套新节点r 从已选节点中再选a 附加一部分节点到已选节点u 从已选节点中去除一部分nkey: 0 仅选面内的节点1 选所有和面相联系的节点(如面内线,关键点处的节点)u esel, type, item, comp, vmin, vmax, vinc, kabs 选择一组单元Type: S: 选择一组单元(缺省)R: 在当前组中再选一部分作为一组A: 为当前组附加单元U: 在当前组中不选一部分单元All: 选所有单元None: 全不选Inve: 反向选择当前组(?)Stat: 显示当前选择状态Item: Elem: 单元号Type: 单元类型号Mat: 材料号Real: 实常数号Esys: 单元坐标系号u ALLSEL, LABT, ENTITY 选中所有项目LABT: ALL: 选所有项目及其低级项目BELOW: 选指定项目的直接下属及更低级项目ENTITY: ALL: 所有项目(缺省)VOLU:体高级AREA:面LINE :线KP:关键点ELEM:单元NODE:节点低级u Tshap,shape 定义接触目标面为2D、3D的简单图形Shape: line:直线Arc:顺时针弧Tria:3点三角形Quad:4点四边形………….2.6 根据需要耦合某些节点自由度u cp, nset, lab,,node1,node2,……node17nset: 耦合组编号lab: ux,uy,uz,rotx,roty,rotznode1-node17: 待耦合的节点号。
ANSYS命令解释(入门级学习必备)
ANSYS命令解释(入门级学习必备)编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(ANSYS命令解释(入门级学习必备))的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为ANSYS命令解释(入门级学习必备)的全部内容。
ANSYS命令集/EXIT,Slab,Fname,Ext,Dir Slab=ALL 保存所有资料Slab=NOSAVE所有更改资料不保存Slab=MODEL保存实体模型,有限元模型,负载的资料(系统默认)例:/EXIT,ALL ——————-———-—-—-—-—-—-——-----—---——---------—-------——-—-/FILNAM,Fname Fname=工作文件名称,不要扩展名例:/FILNAM,Sanpangzi—-—--—-———-——-——---———--—------—-—-----—---—-———-———————/SAVE,Fname,Ext,Dir 保存目前所有的Datebase资料,即更新Jobname.db——————--—--——--—--—-——-——-—----———-—————-——-——---—--——--/RESUME,Fname,Ext,Dir,NOPAR 回到最后SAVE时的Datebase状态—--——--—-----—-—-—-----———-----——--——-———----—-———-—----/CLEAR 清除所有Datebase资料---------—-———-—--—-—-—-——-—————-—---——-———-——-—--—-————LOCAL,KCN,KCS,XC,YC,ZC,THXY,THYZ,THZX,PAR1,PAR2定义区域坐标系统KCN 区域坐标系统代号,大于10的任何号码KCS=0,1,20=笛卡儿坐标 1=圆柱坐标 2=球面坐标XC,YC,ZC 该区域坐标原点与整体坐标原点的关系THXY,THYZ,THZX 该区域坐标与整体坐标XYZ轴的关系例:LOCAL,11,1,1,1,0———-----———--——-——-—--————--—-—--—--——-———————--——--—-—-CSYS,0,1,2声明当前坐标系统例:CSYS,0—--———----—————-----———---------—————---———-———-—--——--—/UNITS,LABEL 声明系统分析时所用的单位LABEL=SI (米,千克,秒)LABEL=CGS (厘米,克,秒)LABEL=BFT (英尺)LABEL=BIN (英寸)例:LABEL,SI—-—-——--———--—-—-—-—-—------——-—-—-———-—————-—-————-———-/PREP7进入通用前处理器-—----——————--—-—-——---—-——-———————---——--———-———--—————N,NODE,X,Y,Z,THXY,THYZ,THZX 定义节点NODE 节点号码 X,Y,Z 节点在当前坐标系中位置例:N,1,2,3,4--—--——-—-------—————-———————-—-—-—-———-—-————-—-—-——-—-NDELE,NODE1,NODE2,NINC 删除已建立的节点NODE1,NODE2 删除从NODE1到NODE2的节点,如1到100NINC 间隔号码,1为1到100全删,2为1,3,5... (99)例:NDELE,1,100,2-——----—--—-——---—--——-———————-——-—--——-—-———-----—--—-—NPLOT,KNUM 将节点显示在图形窗口中KNUM=0不显示节点号码KNUM=1显示节点号码——-----------—--———---—--———--———--——---——————-——---———-NLIST,NODE1,NODE2,NINC将节点资料列在窗口中例:NLIST--——--——-——————--—--—--——--——---——-—---—-—-—-—--—-——--—-NGEN,ITIME,INC,NODE1,NODE2,NINC,DX,DY,DZ,SPACE 复制节点ITIME 复制次数,包括本身INC复制时节点号码增量NODE1,NODE2,NINC 要复制的节点DX,DY,DZ 复制出的节点的位置改变量例:NGEN,4,5,1,5,1,1,2,3 将节点1到5复制4次,每次复制X,Y,Z方向分别移动1,2,3单位长度——--—--—————-———-——-——-----———-—-—--————-—-——--—---—-—--FILL,ITIME,INC,NODE1,NODE2,NINC,DX,DY,DZ,SPACE 填充节点(默认为均分填充)例:FILL,1,100 在节点1到100之间填充2,3... (99)——-—-—-————--—-————-————-—---——-———-————--——---—-—----——ET,ITYPE,Ename,KOPT1… …KOPT6,INOPR 定义元素ITYPE 元素类型编号Ename 所使用元素名称KOPT1—KOPT6 元素特性编码例:ET,1,LINK1 第1类元素为LINK1单元———-—---—---—-—-——-——————---—--——-—-—-————--—-——--———--—MP,Lab,MAT,C0,C1,C2,C3,C4 定义材料特性材料特性为固定值,其值为C0材料特性随温度变化,由C1-C4控制Lab 材料特性类别MAT 对应ET所定义的元素类型编号ITYPELab=EX,EY,EZ 杨氏系数Lab=DENS 密度Lab=PRXY,PRYZ,PRZX 泊松比Lab=GXY,GYZ,GZX 剪力模数例:MP,EX,1,207E9 第一类元素的杨氏系数为207E9——————--—-————-—-—-—----—----—-——-———-—-——--—--——-————-—R,NSET,R1… …R6 定义元素类型几何特性NSET 属性组别号码(系统默认值1)R1—R6所定义元素类型几何特性值例:R,1,1E—4,2。
ansys常用命令中文解释汇总
Abbr
*ABBR,Abbr,String--定义一个缩略语. Abbr:用来表示字符串"String"的缩略语,长度不超过8个字符. String:将由"Abbr"表示的字符串,长度不超过60个字符.
1
Abbres
ABBRES,Lab,Fname,Ext-从一个编码文件中读出缩略语. Lab:指定读操作的标题,
NEW:用这些读出的缩略语重新取代当前的缩略语(默认) CHANGE:将读出的缩略语添加到当前缩略语阵列,并替代现存同名的缩略语. Ext:如果"Fname"是空的,则缺省的扩展命是"ABBR".
对ansys主要命令的解释
对ansys主要命令的解释/CLEAR,READ--清除内存中的所有数据。
“READ”选项表示是否读入初始化文件。
缺省项“START”表示读入STARTXX.ANS文件。
“NOSTART”表示不用读入STARTXX.ANS文件。
这里的“XX”表示ANSYS的版本号,如ANSYS5.7就是“57”,ANSYS7.0就是“70”本文给出了ansys主要命令的一些解释。
1,/PREP7 ! 加载前处理模块2,/CLEAR,NOSTART ! 清除已有的数据, 不读入启动文件的设置(不加载初始化文件)初始化文件是用于记录用户和系统选项设置的文本文件/CLEAR, START !清除系统中的所有数据,读入启动文件的设置/FILENAME, EX10.5 ! 定义工程文件名称/TITLE, EX10.5 SOLID MODEL OF AN AXIAL BEARING ! 指定标题4,F,2,FY,-1000 ! 在2号节点上施加沿着-Y方向大小为1000N的集中力6,FINISH ! 退出模块命令7,/POST1 ! 加载后处理模块8,PLDISP,2 ! 显示结构变形图,参数“2”表示用虚线绘制出原来结构的轮廓9,ETABLE,STRS,LS,1 ! 用轴向应力SAXL的编号”LS,1”定义单元表STRSETABLE, MFORX,SMISC,1 ! 以杆单元的轴力为内容, 建立单元表MFORXETABLE, SAXL, LS, 1 ! 以杆单元的轴向应力为内容, 建立单元表SAXLETABLE, EPELAXL, LEPEL, 1 ! 以杆单元的轴向应变为内容, 建立单元表EPELAXL ETABLE,STRS_ST,LS,1 !以杆件的轴向应力“LS,1”为内容定义单元表STRS_ST ETABLE, STRS_CO, LS,1 !以杆件的轴向应力“LS,1”定义单元表STRS_COETABLE,STRSX,S,X ! 定义X方向的应力为单元表STRSXETABLE,STRSY,S,Y ! 定义Y方向的应力为单元表STRSY*GET,STRSS_ST,ELEM,STEEL_E, ETAB, STRS_ST !从单元表STRS_ST中提取STEEL_E 单元的应力结果,存入变量STRSS_ST;*GET, STRSS_CO,ELEM,COPPER_E,ETAB,STRS_CO”从单元表STRS_CO中提取COPPER _E单元的应力结果,存入变量STRSS_CO10 FINISH !退出以前的模块11, /CLEAR, START ! 清除系统中的所有数据,读入启动文件的设置12 /UNITS, SI !申明采用国际单位制14 /NUMBER, 2 !只显示编号, 不使用彩色/NUMBER, 0 ! 显示编号, 并使用彩色15 /SOLU ! 进入求解模块:定义力和位移边界条件,并求解ANTYPE, STA TIC ! 申明分析类型是静力分析(STATIC或者0)OUTPR, BASIC, ALL ! 在输出结果中, 列出所有荷载步的基本计算结果OUTPR,BASIC,ALL !指定输出所有节点的基本数据OUTPR,BASIC,LAST ! 选择基本输出选项,直到最后一个荷载步OUTPR,,1 ! 输出第1个荷载步的基本计算结果OUTPR,BASIC,1 ! 选择第1荷载步的基本输出项目OUTPR,NLOAD,1 ! 指定输出第1荷载步的内容OUTRES,ALL,0 !设置将所有数据不记录到数据库。
有限元软件ANSYS主要菜单中文解释
ANSYS9.0程序主要菜单中文解释(1) 实用菜单窗口【Utility Menu】实用菜单中的子菜单都是下拉菜单,包括有:【File】文件管理菜单【Select】选择菜单【List】显示菜单【Plot】绘图菜单【PlotCtrls】绘图控制菜单【WorkPlane】工作平面菜单【Parameters】参数控制菜单【Macro】宏管理菜单【MenuCtrls】菜单控制菜单【Help】帮助菜单a. 文件管理菜单【File】【Clear & Start New…】清除或重新启动【Change Jobname…】改变作业名【Change Directory…】改变目录【Change Title…】改变题目【Resum Jobname.db…】取回作业【Resum from…】从目录中取回【Save as Jobname.db】储存作业【Save as…】另存作业【Write DB Log file…】输出.db Log文件【Read Input from…】读入文件【Switch Output to ►】输出结果文件【List ►】显示文件内容【File Options ►】对文件进行重命名、删除和复制等操作【ANSYS File Options…】设定ANSYS文件的属性等【Import ►】导入其他CAD系统的文件【Export…】导出IGES格式的文件【Report Generator…】报告生成器【Exet…】退出b. 选择菜单【Select】【Entites…】选择实体【Component Manager…】组元管理【Comp/Assembly ►】选择组元和集合【Everything】重新激活整个模型【Everything Below ►】激活某类实体c.显示菜单【List】【File ►】显示文件内容【Status ►】显示选取内容的状态【Keypoint ►】显示关键点的属性和相关数据【Lines…】显示线的属性和相关数据【Areas】显示面的属性和相关数据【V olumes】显示体的属性和相关数据【Nodes…】显示节点的属性和相关数据【Elements ►】显示单元的属性和相关数据【Components】显示组元的属性和相关数据【Picked Entities +】显示选中的实体属性和相关数据【Properties ►】显示要查询内容的属性【Loads ►】显示载荷【Results ►】显示求解结果【Other ►】显示模型中其他的一些信息d. 绘图菜单【Plot】【Replot】重新绘制图形窗口中模型【Keypoints ►】在图形窗口中只绘制关键点【Lines】在图形窗口中只绘制线【Areas】在图形窗口中只绘制面【V olumns】在图形窗口中只绘制三维实体【Specified Entities ►】在图形窗口中只绘制指定的图元【Nodes】在图形窗口中只绘制节点【Elements】在图形窗口中只绘制单元【Layered Elements…】在图形窗口中只绘制分层的单元【Materials…】在图形窗口中只绘制材料属性【Data Tables…】在图形窗口中只绘制定义过的材料属性【Array paramentes…】在图形窗口中只绘制参数【Result ►】在图形窗口中只绘制求解结果【Multi-Plots】在图形窗口中只绘制所有图元【Components ►】在图形窗口中只绘制组元e. 绘图控制菜单【PlotCtrls】【Pan Zoom Rotate…】对模型进行移动、缩放和旋转【View Setings ►】模型观察视角的设置【Numbering…】图元编号显示控制【Symbols…】图元窗口中显示符号的控制【Style ►】模型显示风格控制【Font Controls ►】字体显示风格控制【Window Controls ►】图形窗口中的内容显示控制【Erase Options ►】在图形窗口中进行擦除操作【Animate ►】动画显示控制【Annotation ►】注释【Device Options…】设备选择【Redirect plots ►】更改绘图地址【Hard Copy ►】对屏幕进行硬拷贝【Save Plot ctrls…】储存绘图控制【Restore Plotctrls…】恢复绘图控制【Reset Plot ctrls】重新设置绘图控制【Capture Image…】扑捉图形窗口并以位图等文件保存【Restore Image…】恢复扑捉图形窗口【Write Metafile ►】输出材料数据【Multi-plot Controls…】多窗口绘图控制【Multi- Window Layout…】多窗口显示模型【Best Quality Image ►】最好质量扑捉图形窗口f.工作平面菜单【WorkPlane】【Display Working Plane】是否在图形窗口中显示工作平面【Show WP Status】显示工作平面状态【WP Setting…】工作平面参数设置【Offset WP by Increments…】对工作平面进行旋转【Offsets WP to ►】把工作平面移动到指定的图元位置【Align WP with ►】把工作平面按指定方向设置【Change Active CS to ►】更改当前激活坐标系【Change Display CS to ►】更改当前显示的坐标系【Local Coordinage Systems ►】局部坐标系的建立或删除等相关操作g.参数控制菜单【Parameters】h. 宏管理菜单【Macro】i. 菜单控制菜单【MenuCtrls】【Color Selection…】彩色选择【Font Selection…】字体选择【Update Toolbar】更改工具栏窗口【Edit Toolbar…】编辑工具栏窗口【Save Toolbar…】保存更改后的工具栏窗口【Restore Toolbar…】恢复工具栏窗口【Message Controls…】信息控制窗口【Save Menu Layout】保存更改后的菜单布局控制j.【Help】帮助菜单ANSYS的文档都在帮助菜单中,用到时可以查看。
(完整版)ANSYS的最常用的命令解释
Aa,1,2,4,3(由关键点生成面,注意关键点的顺序不能乱)accat,na1,na2由多个面连结生成一个面,以便于体的映射网格划分。
详见lccatadd,加运算,只能对二维和三维图形用此命令,分为aadd和vaddaadd,注意与ovlap(搭接)命令的区别Acel,0,10,0(在y方向施加重力加速度,相当于考虑结构自重。
在模型上施加重力时,一般输入10或9.8,而不是-10或-9.8)aclear,all(删除与所选面相关的节点和单元),见kclearadele,na1,na2,ninc,1(删除所选择的面,na1表示要删除的起始面,na2表示要删除的终止面,ninc表示增量,1表示删除面及附在该面上而不依附于其它实体的线、关键点,此处为0时则仅删除面);删除所有选择的面时:adele,all,,,1;类似的还有kdele,ldele(只能删除没有划分网格的线段),ndele,edele等;Adrag,nl1,nl2,nl3,nl4,nl5,nl6,nlp1,nlp2,nlp3,n lp4,nlp5,nlp6由nl1…nl6沿着nlp1…nlp6扫掠生成面。
nl1…nl6相当于准线,nlp1…nlp6相当于母线。
如adrag,1,,,,,,2,3表示由线1沿着线2、3生成面aesize,all,27(指定面上划分单元大小,all表示对所有的面指定单元大小,也可以选择面的编号,27表示单元最大尺寸)AL,L1,L2,L3,L4,L5,L6,L7,L8,L9,L10此命令由已知的一组直线(L1,…L10)围绕成面(Area),至少须要3条线才能形成面,线段的号码没有严格的顺序限制,只要它们能完成封闭的面积即可。
同时若使用超过4条线去定义面时,所有的线必须在同一平面上,以右手定则来决定面积的方向。
如果L1为负号,则反向。
Paths:Main Menu>Preprocessor>Create>Arbitrary>By Linesallsel,all,all(选择所有实体类型,后面两个all为系统默认,可以省略;第二选项还可以为below,第三选项还可以volu、area、line、kp、elem、node。
ansys重要命令详解
2.4 几何建模的其它常用命令2.4.1 图形控制命令在采用命令流方式建模与求解过程中,一般不需要对屏幕的图形进行设置,但有时命令流中也用到,考虑到学习方便,这里简单进行介绍。
需要说明的是图形控制命令并不改变模型本身及其几何位置。
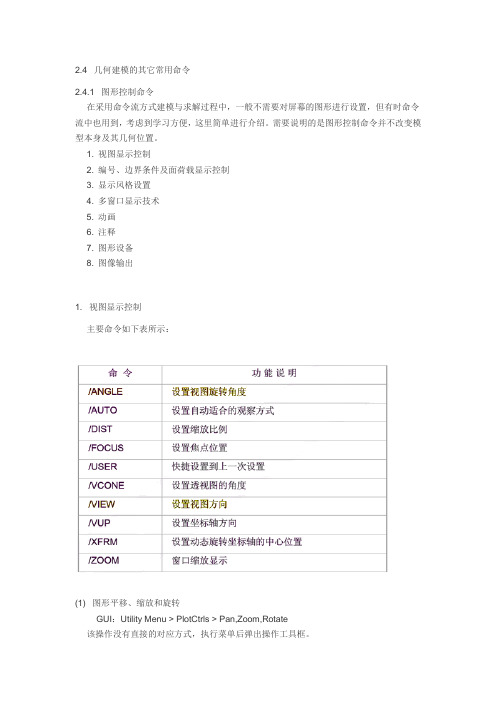
1. 视图显示控制2. 编号、边界条件及面荷载显示控制3. 显示风格设置4. 多窗口显示技术5. 动画6. 注释7. 图形设备8. 图像输出1. 视图显示控制主要命令如下表所示:(1) 图形平移、缩放和旋转GUI:Utility Menu > PlotCtrls > Pan,Zoom,Rotate该操作没有直接的对应方式,执行菜单后弹出操作工具框。
(2) 设置坐标轴方向GUI:Utility Menu>PlotCtrls>View Setting>View Direction命令:/VUP, WN, Label其中Label 为方向选择,其值可取:Label = Y(缺省)表示X 轴水平向右,Y,Z 轴垂直屏幕向外。
Label = -Y 表示X 轴水平向左,Y 轴竖直向下,Z 轴垂直屏幕向外。
Label = X 表示X 轴竖直向上,Y 轴水平向左,Z 轴垂直屏幕向外。
Label = -X 表示X 轴竖直向下,Y 轴水平向右,Z 轴垂直屏幕向外。
Label = Z 表示X 轴垂直屏幕向外,Y 轴水平向右,Z 轴竖直向上。
Label = -Z 表示X 轴垂直屏幕向外,Y 轴水平向左,Z 轴竖直向下。
(3) 设置视图方向GUI:Utility Menu > PlotCtrls > View Setting > View Direction命令:/VIEW, WN, XV, YV, ZV其中:WN - 窗口号(下同),即对哪个窗口进行视图设置,可为ALL,缺省为1。
XV,YV,ZV - 总体坐标系下的某点坐标,此点与总体坐标系原点组成线的方向即为视图方向。
ANSYS命令详解(超全)
一、定义材料号及特性mp,lab,mat,co, c1,…….c4 lab:待定义的特性项目(e x,alp x,ref t,prx y,nux y,gxy,mu,d ens)ex: 弹性模量n uxy:小泊松比alpx:热膨胀系数 ref t: 参考温度 re ft: 参考温度p rxy:主泊松比gxy:剪切模量mu: 摩擦系数d ens:质量密度mat:材料编号(缺省为当前材料号)c 材料特性值,或材料之特性,温度曲线中的常数项c1-c4:材料的特性-温度曲线中1次项,2次项,3次项,4次项的系数二、定义DP材料:首先要定义EX和泊松比:M P,EX,MAT,…… MP,NUXY,MAT,……定义DP材料单元表(这里不考虑温度):TB,DP,M AT进入单元表并编辑添加单元表:TB DATA,1,C TBDAT A,2,ψ TBD ATA,3,…… 如定义:E X=1E8,NUXY=0.3,C=27,ψ=45的命令如下:MP,EX,1,1E8 MP,NU XY,1,0.3 TB,DP,1T BDATA,1,27TBD ATA,2,45这里要注意的是,在前处理的最初,要将角度单位转化到“度”,即命令:*afu n,deg三、单元生死载荷步!第一个载荷步TI ME,... !设定时间值(静力分析选项)N LGEOM,ON !打开大位移效果NROPT,FULL !设定牛顿-拉夫森选项ESTIF,...!设定非缺省缩减因子(可选)ESE L,... !选择在本载荷步中将不激活的单元EKILL,...!不激活选择的单元ESE L,S,L IVE !选择所有活动单元NSLE,S !选择所有活动结点NSEL,INVE!选择所有非活动结点(不与活动单元相连的结点)D,A LL,AL L,0 !约束所有不活动的结点自由度(可选)NSEL,ALL!选择所有结点ESEL,ALL !选择所有单元D,...!施加合适的约束F,... !施加合适的活动结点自由度载荷SF,... !施加合适的单元载荷BF,... !施加合适的体载荷S AVE SOLV E请参阅TIM E,NLG EOM,N ROPT,ESTIF,ESEL,EKIL L,NSL E,NSE L,D,F,SF和B F命令得到更详细的解释。
有限元软件ANSYS主要菜单中文解释
ANSYS9.0程序主要菜单中文解释(1) 实用菜单窗口【Utility Menu】实用菜单中的子菜单都是下拉菜单,包括有:【File】文件管理菜单【Select】选择菜单【List】显示菜单【Plot】绘图菜单【PlotCtrls】绘图控制菜单【WorkPlane】工作平面菜单【Parameters】参数控制菜单【Macro】宏管理菜单【MenuCtrls】菜单控制菜单【Help】帮助菜单a. 文件管理菜单【File】【Clear & Start New…】清除或重新启动【Change Jobname…】改变作业名【Change Directory…】改变目录【Change Title…】改变题目【Resum Jobname.db…】取回作业【Resum from…】从目录中取回【Save as Jobname.db】储存作业【Save as…】另存作业【Write DB Log file…】输出.db Log文件【Read Input from…】读入文件【Switch Output to ►】输出结果文件【List ►】显示文件内容【File Options ►】对文件进行重命名、删除和复制等操作【ANSYS File Options…】设定ANSYS文件的属性等【Import ►】导入其他CAD系统的文件【Export…】导出IGES格式的文件【Report Generator…】报告生成器【Exet…】退出b. 选择菜单【Select】【Entites…】选择实体【Component Manager…】组元管理【Comp/Assembly ►】选择组元和集合【Everything】重新激活整个模型【Everything Below ►】激活某类实体c.显示菜单【List】【File ►】显示文件内容【Status ►】显示选取内容的状态【Keypoint ►】显示关键点的属性和相关数据【Lines…】显示线的属性和相关数据【Areas】显示面的属性和相关数据【V olumes】显示体的属性和相关数据【Nodes…】显示节点的属性和相关数据【Elements ►】显示单元的属性和相关数据【Components】显示组元的属性和相关数据【Picked Entities +】显示选中的实体属性和相关数据【Properties ►】显示要查询内容的属性【Loads ►】显示载荷【Results ►】显示求解结果【Other ►】显示模型中其他的一些信息d. 绘图菜单【Plot】【Replot】重新绘制图形窗口中模型【Keypoints ►】在图形窗口中只绘制关键点【Lines】在图形窗口中只绘制线【Areas】在图形窗口中只绘制面【V olumns】在图形窗口中只绘制三维实体【Specified Entities ►】在图形窗口中只绘制指定的图元【Nodes】在图形窗口中只绘制节点【Elements】在图形窗口中只绘制单元【Layered Elements…】在图形窗口中只绘制分层的单元【Materials…】在图形窗口中只绘制材料属性【Data Tables…】在图形窗口中只绘制定义过的材料属性【Array paramentes…】在图形窗口中只绘制参数【Result ►】在图形窗口中只绘制求解结果【Multi-Plots】在图形窗口中只绘制所有图元【Components ►】在图形窗口中只绘制组元e. 绘图控制菜单【PlotCtrls】【Pan Zoom Rotate…】对模型进行移动、缩放和旋转【View Setings ►】模型观察视角的设置【Numbering…】图元编号显示控制【Symbols…】图元窗口中显示符号的控制【Style ►】模型显示风格控制【Font Controls ►】字体显示风格控制【Window Controls ►】图形窗口中的内容显示控制【Erase Options ►】在图形窗口中进行擦除操作【Animate ►】动画显示控制【Annotation ►】注释【Device Options…】设备选择【Redirect plots ►】更改绘图地址【Hard Copy ►】对屏幕进行硬拷贝【Save Plot ctrls…】储存绘图控制【Restore Plotctrls…】恢复绘图控制【Reset Plot ctrls】重新设置绘图控制【Capture Image…】扑捉图形窗口并以位图等文件保存【Restore Image…】恢复扑捉图形窗口【Write Metafile ►】输出材料数据【Multi-plot Controls…】多窗口绘图控制【Multi- Window Layout…】多窗口显示模型【Best Quality Image ►】最好质量扑捉图形窗口f.工作平面菜单【WorkPlane】【Display Working Plane】是否在图形窗口中显示工作平面【Show WP Status】显示工作平面状态【WP Setting…】工作平面参数设置【Offset WP by Increments…】对工作平面进行旋转【Offsets WP to ►】把工作平面移动到指定的图元位置【Align WP with ►】把工作平面按指定方向设置【Change Active CS to ►】更改当前激活坐标系【Change Display CS to ►】更改当前显示的坐标系【Local Coordinage Systems ►】局部坐标系的建立或删除等相关操作g.参数控制菜单【Parameters】h. 宏管理菜单【Macro】i. 菜单控制菜单【MenuCtrls】【Color Selection…】彩色选择【Font Selection…】字体选择【Update Toolbar】更改工具栏窗口【Edit Toolbar…】编辑工具栏窗口【Save Toolbar…】保存更改后的工具栏窗口【Restore Toolbar…】恢复工具栏窗口【Message Controls…】信息控制窗口【Save Menu Layout】保存更改后的菜单布局控制j.【Help】帮助菜单ANSYS的文档都在帮助菜单中,用到时可以查看。
(完整版)ANSYS最常用命令流+中文注释(超级大全)
ANSYS最常用命令流+中文注释VSBV, NV1, NV2, SEPO, KEEP1, KEEP2 —Subtracts volumes from volumes,用于2个solid相减操作,最终目的是要nv1-nv2=?通过后面的参数设置,可以得到很多种情况:sepo项是2个体的边界情况,当缺省的时候,是表示2个体相减后,其边界是公用的,当为sepo的时候,表示相减后,2个体有各自的独立边界。
keep1与keep2是询问相减后,保留哪个体?当第一个为keep时,保留nv1,都缺省的时候,操作结果最终只有一个体,比如:vsbv,1,2,sepo,,keep,表示执行1-2的操作,结果是保留体2,体1被删除,还有一个1-2的结果体,现在一共是2个体(即1-2与2),且都各自有自己的边界。
如vsbv,1,2,,keep,,则为1-2后,剩下体1和体1-2,且2个体在边界处公用。
同理,将v换成a 及l是对面和线进行减操作!mp,lab, mat, co, c1,…….c4 定义材料号及特性lab: 待定义的特性项目(ex,alpx,reft,prxy,nuxy,gxy,mu,dens) ex: 弹性模量nuxy: 小泊松比alpx: 热膨胀系数reft: 参考温度reft: 参考温度prxy: 主泊松比gxy: 剪切模量mu: 摩擦系数dens: 质量密度mat: 材料编号(缺省为当前材料号)co: 材料特性值,或材料之特性,温度曲线中的常数项c1-c4: 材料的特性-温度曲线中1次项,2次项,3次项,4次项的系数定义DP材料:首先要定义EX和泊松比:MP,EX,MA T,……MP,NUXY,MAT,……定义DP材料单元表(这里不考虑温度):TB,DP,MA T进入单元表并编辑添加单元表:TBDATA,1,CTBDATA,2,ψTBDATA,3,……如定义:EX=1E8,NUXY=0.3,C=27,ψ=45的命令如下:MP,EX,1,1E8MP,NUXY,1,0.3TB,DP,1TBDATA,1,27TBDATA,2,45这里要注意的是,在前处理的最初,要将角度单位转化到“度”,即命令:*afun,degVSEL, Type, Item, Comp, VMIN, VMAX, VINC, KSWP Type,是选择的方式,有选择(s),补选(a),不选(u),全选(all)、反选(inv)等,其余方式不常用Item, Comp 是选取的原则以及下面的子项如volu 就是根据实体编号选择,loc 就是根据坐标选取,它的comp就可以是实体的某方向坐标!其余还有材料类型、实常数等MIN, VMAX, VINC,这个就不必说了吧!,例:vsel,s,volu,,14vsel,a,volu,,17,23,2上面的命令选中了实体编号为14,17,19,21,23的五个实体VDELE, NV1, NV2, NINC, KSWP: 删除未分网格的体nv1:初始体号nv2:最终的体号ninc:体号之间的间隔kswp=0:只删除体kswp=1:删除体及组成关键点,线面如果nv1=all,则nv2,ninc不起作用其后面常常跟着一条显示命令VPLO,或aplo,nplo,这个湿没有参数的命令,输入后直接回车,就可以显示刚刚选择了的体、面或节点,很实用的哦!Nsel, type, item, comp, vmin, vmax, vinc, kabs 选择一组节点为下一步做准备Type: S: 选择一组新节点(缺省)R: 在当前组中再选择A: 再选一组附加于当前组U: 在当前组中不选一部分All: 恢复为选中所有None: 全不选Inve: 反向选择Stat: 显示当前选择状态Item: loc: 坐标node: 节点号Comp: 分量Vmin,vmax,vinc: ITEM范围Kabs: “0” 使用正负号“1”仅用绝对值下面是单元生死第一个载荷步中命令输入示例:!第一个载荷步TIME,... !设定时间值(静力分析选项)NLGEOM,ON !打开大位移效果NROPT,FULL !设定牛顿-拉夫森选项ESTIF,... !设定非缺省缩减因子(可选)ESEL,... !选择在本载荷步中将不激活的单元EKILL,... !不激活选择的单元ESEL,S,LIVE !选择所有活动单元NSLE,S !选择所有活动结点NSEL,INVE !选择所有非活动结点(不与活动单元相连的结点)D,ALL,ALL,0 !约束所有不活动的结点自由度(可选)NSEL,ALL !选择所有结点ESEL,ALL !选择所有单元D,... !施加合适的约束F,... !施加合适的活动结点自由度载荷SF,... !施加合适的单元载荷BF,... !施加合适的体载荷SA VESOLVE请参阅TIME,NLGEOM,NROPT,ESTIF,ESEL,EKILL,NSLE,NSEL,D, F,SF和BF命令得到更详细的解释。
Ansys常用命令功能以及英文全称
常用APDL命令FINISH Finish,结束分析/CLEAR Clear,清空当前数据库以开始新的分析/FILNAME File Name,修改工作文件名/’TITLE Title,创建标题/PREP7 Preprocessor,进入前处理器ET Element Type,定义单元类型KEYOPT Key Options,设置单元关键选项/UNITS Units,设置单位制度MP Material Properties,定义线行材料属性TB Table,定义非线性材料属性,用二维数组表示TBPT Table Point,为TB定义的二维数组输入材料属性值CSYS Coordinate System,设置总体坐标系统LOCAL Local coordinate system,设置局部坐标R Real Constants,定义单元实常数K Key points创建关键点L Lines,由关键点创建线对象A Areas,由关键点创建面对象V V olumes,由关键点创建体对象CIRCLE Circle,创建圆弧线RECTNG Rectangle创建一个矩形面CYL4 Cylinder,创建一个圆面或圆柱体PCIRC Point-circle,以工作平面远点为圆心创建一个圆形区域BLOCK Block,创建一个块体CYLND Cylinder,创建一个圆面或圆柱体VROTAT Volume Rotate,由面绕轴线旋转生成圆柱体VINV V olume Rotate,提对象的Intersect布尔运算AINA Areas Intersect Areas,面对象的Intersect布尔运算V ADD Volumes Add,提对象的Add布尔运算AADD Areas Add,面对象的Add布尔运算VGLUE V olumes Glue,提对象的Glue布尔运算AGLUE Areas Glue,面对象的Glue布尔运算VOVLAP V olumes Overlap,体对象的Overlap布尔运算AOVLAP Areas Overlap,面对象的Overlap布尔运算KPLOT Keypoints Plot,选择关键点LSEL Lines Select,选择线对象ASEL Areas Select,选择面对象VSEL V olumes select,选择体对象KILST Keypoints List,列表显示关键点信息LLIST Lines List,列表显示线信息ALIST Areas List,列表显示面信息VLIST V olumes List,列表显示体信息N Nodes,创建节点E Element,由节点创建单元NPLOT Nodes Select,绘制节点EPLOT Element Plot,绘制节点NSEL Nodes Select,绘制单元ESEL Element Select,选择单元NLIST Nodes List,列表显示节点信息ELIST Element List,列表显示单元信息/PUNM Plot Number,打开编号显示功能NUMCMP Number Compress,压缩对象的编号AATT Area Attribute,为面对象分配单元属性V ATT Volume Attributes,为体对象分配单元属性TYPE Type,默认方式分配单元实常数REAL Real Constants,默认方式分配材料属性MAT Material,默认方式分配材料属性ESYS Element Coordinate System,默认方式分配单元坐标ESIZE Element Size,设置单元尺寸LESIZE Line Size,设置线分割属性SMRTSIZE Smart Size,设置智能网格划分水平MSHKEY Meshing Key ,设置网格划分方式,自由还是映射划分MSHAPE Meshing Shape,设置映射划分时的单元形状AMESH Areas Mesh 划分面对象VMESH V olumes Mesh 划分体对象SA VE Save,保存数据库FINISH Finish,退出前处理器/SOLU Solution,进入求解器ANTYPE Analysis Type,设置求解类型D 为节点施加DOF约束DL 为线施加DOF约束DA 为面施加DOF约束DK 为关键点施加DOF约束F 在节点上施加集中力载荷FK 在关键点上施加集中力载荷FL 在线上施加集中力载荷BF 在节点上施加体载荷BFK 在关键点上施加体载荷BFL 在线上施加体载荷BFA 在面上施加体载荷BFV 在体上施加体载荷BFE 在单元上施加提载荷TIME Time,设置一个载荷步的总时间DELTIM Define LoadStep Time,设置时间步长KBC 设置加载方式为阶跃还是斜坡NSUBST Number of Subsets,设置子步数OUTERS Output Results,设置输出属性SOLVE Solve,求解有限元分析FINISH Finish 退出求解器/POST1 PostProcessor,进入通用后处理器SET Set,读取载荷步或者子载荷步PLDISP Plot Displaced Structure,绘制结果变形图PLF2D Plot Flux Lines,绘制磁力线PLNSOL Plot Nodal Solution绘制显示节点解的结果PRNSOL Print Nodal Solution列表显示节点解的结果ETABLE Element Table,创建单元表PLETAB Plot Element Table,绘制单元表中的结果PATH Path,定义路径PPATH 确定路径的起点和终点PDEF Path Define,将结果数据映射到路径PLPATH Plot Path,绘制路径图NSORT Nodes Sort,为节点排序FINISH 退出/POST1/POST26 进入时间历程后处理器NSOL Nodal Solution,将节点解的结果赋给变量PLTIME Plotting Time,指定时间变量曲线的时间范围PLV AR Plot Variable,绘制时间-变量曲线图。
ANSYS常用命令的详细解释
ANSYS常用命令的详细解释1.复制命令EGEN,ITIME, NINC, IEL1, IEL2, IEINC, MINC, TINC, RINC, CINC, SINC, DX, DY, DZ单元复制命令是将一组单元在现有坐标下复制到其他位置,但条件是必须先建立节点,节点之间的号码要有所关联。
ITIME:复制次数,包括自己本身。
NINC: 每次复制元素时,相对应节点号码的增加量。
IEL1,IEL2,IEINC:选取复制的元素,即哪些元素要复制。
MINC:每次复制元素时,相对应材料号码的增加量。
TINC:每次复制元素时,类型号的增加量。
RINC:每次复制元素时,实常数表号的增加量。
CINC:每次复制元素时,单元坐标号的增加量。
SINC:每次复制元素时,截面ID号的增加量。
DX, DY, DZ:每次复制时在现有坐标系统下,节点的几何位置的改变量。
2、定义局部坐标:LOCAL,KCN,KCS,XC,YC,ZC,THXY,THYZ,THZX,PAR1,PAR2KCN:坐标系统代号,大于10的任何一个号码都可以。
KCS:局部坐标系统的属性。
KCS=0 卡式坐标;KCS=1 圆柱坐标;KCS=2 球面坐标;KCS=3 自定义坐标;KCS=4 工作平面坐标;KCS=5 全局初始坐标。
XC,YC,ZC:局域坐标与整体坐标系统原点的关系。
THXY,THYZ,THZX:局域坐标与整体坐标系统X、Y、Z轴的关系。
3、声明单位:/UNITS,LABELLABEL=SI (公制,米、千克、秒)LABEL=CSG (公制,厘米、克、秒)LABEL=BFT (英制,长度=ft英尺)LABEL=BIN (英制,长度=in英寸)4、定义节点的集中力:F,NODE,Lab,VALUE,VALUE2,NEND,NINCNODE:节点号码。
Lab:外力的形式。
Lab=FX,FY,FZ,MX,MY,MZ(结构力学的方向、力矩方向)=HEAT(热学的热流量)=AMP,CHRG(电学的电流、载荷)=FLUX(磁学的磁通量)VALUE:外力的大小。
ansys命令解释
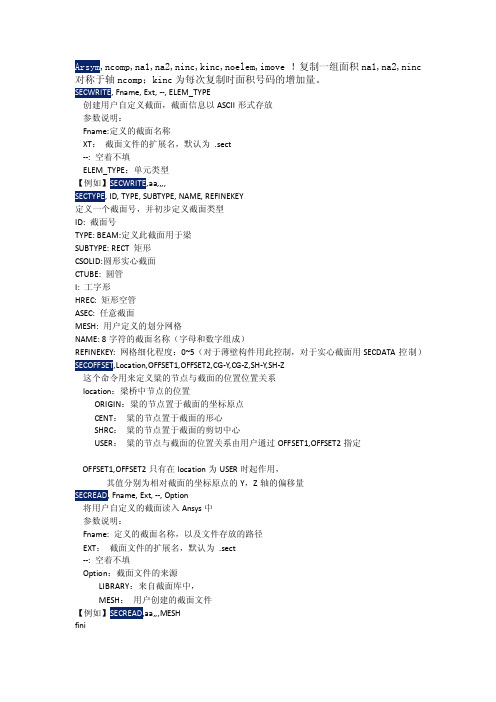
,ncomp,na1,na2,ninc,kinc,noelem,imove !复制一组面积na1,na2,ninc 对称于轴ncomp;kinc为每次复制时面积号码的增加量。
, Fname, Ext, --, ELEM_TYPE创建用户自定义截面,截面信息以ASCII形式存放参数说明:Fname:定义的截面名称XT:截面文件的扩展名,默认为.sect--: 空着不填ELEM_TYPE:单元类型【例如】,aa,,,,, ID, TYPE, SUBTYPE, NAME, REFINEKEY定义一个截面号,并初步定义截面类型ID: 截面号TYPE: BEAM:定义此截面用于梁SUBTYPE: RECT 矩形CSOLID:圆形实心截面CTUBE: 圆管I: 工字形HREC: 矩形空管ASEC: 任意截面MESH: 用户定义的划分网格NAME: 8字符的截面名称(字母和数字组成)REFINEKEY: 网格细化程度:0~5(对于薄壁构件用此控制,对于实心截面用SECDATA控制),Location,OFFSET1,OFFSET2,CG-Y,CG-Z,SH-Y,SH-Z这个命令用来定义粱的节点与截面的位置位置关系location:梁桥中节点的位置ORIGIN:粱的节点置于截面的坐标原点CENT:粱的节点置于截面的形心SHRC:粱的节点置于截面的剪切中心USER:粱的节点与截面的位置关系由用户通过OFFSET1,OFFSET2指定OFFSET1,OFFSET2只有在location为USER时起作用,其值分别为相对截面的坐标原点的Y,Z轴的偏移量, Fname, Ext, --, Option将用户自定义的截面读入Ansys中参数说明:Fname: 定义的截面名称,以及文件存放的路径EXT:截面文件的扩展名,默认为.sect--: 空着不填Option:截面文件的来源LIBRARY:来自截面库中,MESH:用户创建的截面文件【例如】,aa,,,MESHfini/clear,nostart/prep7/title,modelingsmrtsize_shu=5et,1,82!主塔左塔截面1,编号1k,1,0,0.70k,2,0.40,0.70k,3,0.40,0k,4,0.50,0k,5,2.00,0.60k,6,2.00,0.75k,7,1.33,0.80k,8,1.33,2.40k,9,2.00,2.45k,10,2.00,2.60k,11,0.30,2.60k,12,0.30,2.50k,13,0,2.50a,1,2,3,4,5,6,7,8,9,10,11,12,13ARSYM,X,allaadd,allsmrtsize,7amesh,allsecwrite,zhuta1,sect,,1sectype,1,beam,mesh,secoffset,centsecread,'zhuta1','sect',,meshasel,allaclear,alladele,all,,,1 !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!。
ANSYS命令详解(超全)
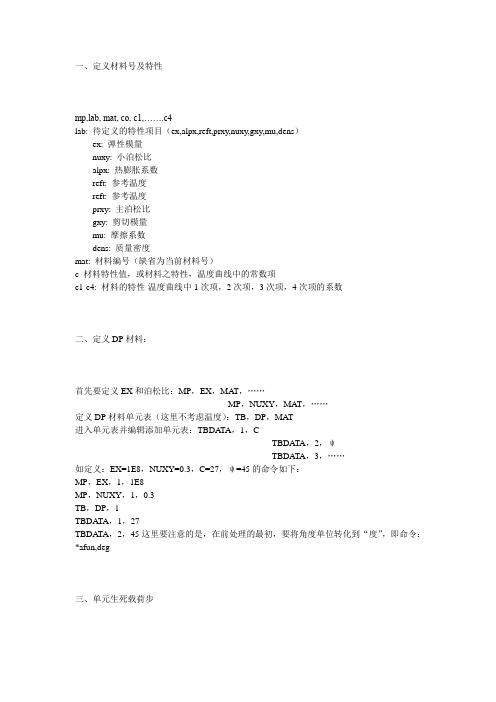
一、定义材料号及特性mp,lab, mat, co, c1,…….c4lab: 待定义的特性项目(ex,alpx,reft,prxy,nuxy,gxy,mu,dens)ex: 弹性模量nuxy: 小泊松比alpx: 热膨胀系数reft: 参考温度reft: 参考温度prxy: 主泊松比gxy: 剪切模量mu: 摩擦系数dens: 质量密度mat: 材料编号(缺省为当前材料号)c 材料特性值,或材料之特性,温度曲线中的常数项c1-c4: 材料的特性-温度曲线中1次项,2次项,3次项,4次项的系数二、定义DP材料:首先要定义EX和泊松比:MP,EX,MA T,……MP,NUXY,MA T,……定义DP材料单元表(这里不考虑温度):TB,DP,MAT进入单元表并编辑添加单元表:TBDATA,1,CTBDATA,2,ψTBDATA,3,……如定义:EX=1E8,NUXY=0.3,C=27,ψ=45的命令如下:MP,EX,1,1E8MP,NUXY,1,0.3TB,DP,1TBDA TA,1,27TBDA TA,2,45这里要注意的是,在前处理的最初,要将角度单位转化到“度”,即命令:*afun,deg三、单元生死载荷步!第一个载荷步TIME,... !设定时间值(静力分析选项)NLGEOM,ON !打开大位移效果NROPT,FULL !设定牛顿-拉夫森选项ESTIF,... !设定非缺省缩减因子(可选)ESEL,... !选择在本载荷步中将不激活的单元EKILL,... !不激活选择的单元ESEL,S,LIVE !选择所有活动单元NSLE,S !选择所有活动结点NSEL,INVE !选择所有非活动结点(不与活动单元相连的结点)D,ALL,ALL,0 !约束所有不活动的结点自由度(可选)NSEL,ALL !选择所有结点ESEL,ALL !选择所有单元D,... !施加合适的约束F,... !施加合适的活动结点自由度载荷SF,... !施加合适的单元载荷BF,... !施加合适的体载荷SA VESOLVE请参阅TIME,NLGEOM,NROPT,ESTIF,ESEL,EKILL,NSLE,NSEL,D,F,SF和BF命令得到更详细的解释。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对ansys主要命令的解释1,/PREP7 ! 加载前处理模块2,/CLEAR,NOSTART ! 清除已有的数据, 不读入启动文件的设置(不加载初始化文件)初始化文件是用于记录用户和系统选项设置的文本文件/CLEAR, START !清除系统中的所有数据,读入启动文件的设置/FILENAME, EX10.5 ! 定义工程文件名称/TITLE, EX10.5 SOLID MODEL OF AN AXIAL BEARING ! 指定标题4,F,2,FY,-1000 ! 在2号节点上施加沿着-Y方向大小为1000N的集中力6,FINISH ! 退出模块命令7,/POST1 ! 加载后处理模块8,PLDISP,2 ! 显示结构变形图,参数“2”表示用虚线绘制出原来结构的轮廓9,ETABLE,STRS,LS,1 ! 用轴向应力SAXL的编号”LS,1”定义单元表STRSETABLE, MFORX,SMISC,1 ! 以杆单元的轴力为内容, 建立单元表MFORXETABLE, SAXL, LS, 1 ! 以杆单元的轴向应力为内容, 建立单元表SAXLETABLE, EPELAXL, LEPEL, 1 ! 以杆单元的轴向应变为内容, 建立单元表EPELAXLETABLE,STRS_ST,LS,1 !以杆件的轴向应力“LS,1”为内容定义单元表STRS_STETABLE, STRS_CO, LS,1 !以杆件的轴向应力“LS,1”定义单元表STRS_COETABLE,STRSX,S,X ! 定义X方向的应力为单元表STRSXETABLE,STRSY,S,Y ! 定义Y方向的应力为单元表STRSY*GET,STRSS_ST,ELEM,STEEL_E, ETAB, STRS_ST !从单元表STRS_ST中提取STEEL_E单元的应力结果,存入变量STRSS_ST;*GET, STRSS_CO,ELEM,COPPER_E,ETAB,STRS_CO”从单元表STRS_CO中提取COPPER_E单元的应力结果,存入变量STRSS_CO10 FINISH !退出以前的模块11, /CLEAR, START ! 清除系统中的所有数据,读入启动文件的设置12 /UNITS, SI !申明采用国际单位制14 /NUMBER, 2 !只显示编号, 不使用彩色/NUMBER, 0 ! 显示编号, 并使用彩色15 /SOLU ! 进入求解模块:定义力和位移边界条件,并求解ANTYPE, STATIC ! 申明分析类型是静力分析(STATIC或者0)OUTPR, BASIC, ALL ! 在输出结果中, 列出所有荷载步的基本计算结果OUTPR,BASIC,ALL !指定输出所有节点的基本数据OUTPR,BASIC,LAST ! 选择基本输出选项,直到最后一个荷载步OUTPR,,1 ! 输出第1个荷载步的基本计算结果OUTPR,BASIC,1 ! 选择第1荷载步的基本输出项目OUTPR,NLOAD,1 ! 指定输出第1荷载步的内容OUTRES,ALL,0 !设置将所有数据不记录到数据库。
NSUBST,1 ! 指定当前求解的荷载步16 /AUTO,1 ! 设置模型显示的最佳比例17 /VUP,1,X ! 设置X轴向上/ANGLE,1,0 ! 水平轴夹角0度18 SMRT,OFF ! 关闭智能化网格功能18 MP, EX, 1, 207E9 ! 定义第1类材料弹性模量EX=207GPaMP,NUXY,1,0 ! 定义第1类材料的泊松比NUXY = 0MP,PRXY,1,0.3 ! 定义第1类材料的泊松比PRXY=0.319 *DIM,LABEL,CHAR,2 ! 定义两个字符型数组LABEL*DIM,VALUE,,2,3 ! 定义2*3数值型数组VALUE21 MP,ALPX,1,1.6E-5 ! 定义第1类材料(铜)的热膨胀系数1.6E-522 MAT,2 ! 改变材料类型号为2E,2,5 ! 过节点2、5定义铁杆单元23 CP,1,UY,5,4,6 ! 定义5、4、6这3个节点的UY为耦合自由度,即3者的UY位移总是相等24 MP,ALPX,1,2.25E-5 定义热膨胀系数26 /VIEW,1,1,1,1 !切换视点到等轴侧位置27 ET,1,BEAM3,,,,,,,1 ! 定义第1类单元为二维弹性梁单元BEAM3,关闭输出选项28 SOLCONTROL,0 ! 指定不使用(用参数0来表示)最优化的非线性求解器29 NEQIT,250 ! 指定最大的非线性叠代次数为150次30 ESIZE,0.2 ! 设置单元划分是单元的大小为0.2mAMESH,1 ! 对1号面执行面单元划分操作,得到有限元模型31[url=mk:@MSITStore:D:\ansys10.0\v100\commonfiles\help\en-us\ansyshelp.chm::/Hlp_C_VSWEEP.htm l]VSWEEP[/url] - Fills an existing unmeshed volume with elements by sweeping the mesh from an adjacent area through the volume[pre] VSWEEP,1 ! Mesh rod[/pre][pre]32 /NOERASE !设置不清除已有图形[/pre][pre]33 NROTAT,ALL !旋转所有节点的局部坐标系到当前的主坐标轴方向[/pre]34 /NOPR !关闭输入数据的反馈和解释。
在默认状态下,所有输入的数据都在Ansys的“Outout Window”中输入数据的反馈和解释性的信息[/pre]/GOPR”重新打开输入数据的反馈和解释[/pre][pre]35 K,62,159,102, 50*sqrt(3) ! 过(159mm,102mm,50mm)定义关键点62[/pre]1 温度场BFUNIF,TEMP,80 ! 温度从原来的70度均匀升到80度(TREF+10)BFUNIF,TEMP,77 ! 将所有节点的温度均匀提升到77度TREF,70 ! 设定参考温度为70度TUNIF,80 ! 设置温度升高80度,形成温度应力BFUNIF,TEMP, -12 !将薄膜的温度降低12度,以生成薄膜应力2 定义实常数ET,1,BEAM4 !定义第1类单元为空间三维弹性梁单元BEAM4R,1,25.81E-4,55.493E-8,55.493E-8,50.8E-3,50.8E-3 !定义三维梁单元BEAM4的截面积为25.81E-4 m2,两个方向的抗弯惯性矩55.493E-8 m4和两个方向的截面高度为50.8 mm3 施加载荷SFBEAM3, 1, 1, PRES, 0, 300 !(在BEAM3单元上)定义第1号单元上的(第一个面)线性分布荷载、起始值和终止值SFBEAM,1,1,PRES,5000 ! 定义第1个单元的表面荷载5000N/m(均布载荷)SFE,ALL,1,PRES,,0.041370 ! 在所有线(单元)表面施加0.041370 MPa的(均布)压力荷载FK,1,FY,-33539 ! 在第1个关键点上施加沿着-Y方向的集中力33539 ND, 1, ALL, 0 ! 约束1号节点的所有节点位移自由度UX和UYD, 1, UX,0,,,,,UY,ROTZ !位移约束1号节点的所有自由度D, 5, UY, 0 ! 约束5号节点的竖向自由度UYD,1,ALL,,,3,2 ! 约束1号节点的所有位移自由度,按增量2循环到3号节点来约束3号节点D,1,ALL,,,3 !定义1号节点到3号节点全部固定DL, 7, ,ALL,0 ! 固定7号直线的所有自由度F, 6, FY, -1000 ! 对6号节点施加-Y方向的集中力1000N4 显示图形或结果NPLOT ! 只显示节点位置,不显示节点号码NPLOT,1 !显示节点位置,显示节点号码NLIST !列出节点在直角坐标系下的坐标值PRDISP !列表显示节点位移值计算结果PRDISP !列表显示节点位移值计算结果PRETAB ! 显示单元表中的计算结果PLETAB, MFORX ! 用色度图显示单元表MFORX中杆件轴力图5 复制和填充FILL,1,11 !在节点1和节点11之间均匀填充节点(2到10)EGEN,10,1,1,1,1 !元素复制命令,复制10次,相对应节点增量为1,后三位数表示要复制的元素EGEN,10,1,1 ! 按照前面单元的模式循环10次,生成其余的9个单元NGEN,2,11,1,11,,12.7 ! 循环2次, 节点号增量11, 按1号节点到11号节点的范围, X坐标增加12.7mm。
生成12号到22号节点NGEN命令的格式是“NGEN, ITIME,INC, NODE1,NODE2, NINC, DX, DY, DZ, SPACE”表示循环ITIME 次(包括原来的那一批节点),每次节点号增加INC个,按照从NODE1到NODE2,增量为NINC的节点范围,每次循环时3个坐标增量为DX,DY和DZ,“SPACE”是间隔比例因子EGEN, ITIME, NINC, IEL1, IEL2, IEINC, MINC,TINC, RINC, CINC, SINC, DX, DY, DZ,各项参数的意义是按照增量NINC循环ITIME次,按照从单元IEL1到IEL2,增量为IEINC范围内的单元EGEN,3,10, -1 !循环3次,每次单元的节点号增量为10,按照前1个单元的模式生成单元,这里“-1”表示前面刚定义的前1个单元AGEN,ITIME,NA1,NA2,NINC,DX,DY,DZ,KINC,NOELEM,IMOVE面积复制命令AGEN,2,1,2,1,,62 !循环两次,从1号面到2号面,每次循环面号增加1,向Y方向平移62mm6 提取指定位置的节点和单元,定义单元表并获取弯曲应力MID_NODE = NODE (2,,, ) ! 选择距离(2,0,0)位置最近的节点,命名为MID_NODE*GET,DISP,NODE,MID_NODE,U,Y ! 提取名称为MID_NODE的节点的竖向位移UY,存入变量DISPMID_ELM = ENEARN (MID_NODE) ! 选择距离MID_NODE节点最近的单元, 命名为MID_ELM ETABLE,STRS,LS,3 ! 以LS,3(-Y一侧的弯曲应力SBYB)为内容定义单元表STRS*GET,STRSS,ELEM,MID_ELM,ETAB,STRS ! 提取单元表STRS中单元MID_ELM的应力,存入STRSS7 弯矩和剪力单元表的提取ETABLE,IMOMENT, SMISC, 6 ! 建立元素结果表,元素I点力矩ETABLE,JMOMENT, SMISC, 12 ! 建立元素结果表,元素J点力矩ETABLE, ISHEAR, SMISC, 2 ! 建立元素结果表,元素I点剪力ETABLE, JSHEAR, SMISC, 8 ! 建立元素结果表,元素J点剪力PRETAB ! 显示单元表中数据项的计算结果/TITLE, SHEAR FORCE DIAGRAM ! 定义图形窗口标题PLLS, ISHEAR, JSHEAR ! 结构剪力分布图/TITLE, BENDING MOMENT DIAGRAM ! 定义图形窗口标题PLLS, IMOMENT, JMOMENT ! 结构弯矩分布图8 移去前面施加的(横向)荷载和删除约束:FDEL,11,FXDDELE,ALL !删除所有节点的所有约束9 显示节点应力:/DEVICE,VECTOR,1 ! 切换显示风格为矢量线方式,便于单元网格的显示。